Изобретение относится к аэрокосмической технике и может быть использовано для определения орбиты космического аппарата (КА), снабженного аппаратурой для съемки подстилающей поверхности.
Известен способ определения параметров движения КА при проведении траекторных измерений (патент РФ 2555247 С1; МПК B64G 3/00(2006.01) G01S 13/58(2006.01); Опубликовано: 10.07.2015 Бюл. №19), согласно которому при обмене информацией с КА по радиоканалу станции слежения (СС) производит измерение дальности до КА и скорости ее изменения. Основная и дополнительные антенны СС принимают ответный сигнал с КА и передают его в блок интерферометрических измерений (БИИ), имеющий фазовый пеленгатор. В БИИ определяются углы азимута и места КА и скорости их изменения. Для раскрытия неоднозначности угловых измерений они дополнительно производятся на частоте, излучаемой с борта КА и равной 1/4 основной. Это позволяет не применять на СС антенн, создающих укороченные базы. Все шесть измеренных параметров (расстояние, углы и скорости их изменения) передаются в баллистический центр, где по ним определяется траектория и прогноз движения КА. Данный способ обеспечивает упрощение сети слежения за полетом КА при одновременном определении шести параметров движения КА при проведении траекторных измерений одной станцией слежения.
Известен способ определения орбиты и ориентации КА в пространстве (патент РФ 2542599 С2; МПК G01C 21/02 (2006.01); Опубликовано: 20.02.2015 Бюл. №5), согласно которому осуществляют формирование оценок оскулирующих элементов орбиты и углов ориентации КА относительно осей текущей орбитальной системы координат. Эти оценки определяются на основе анализа геоцентрических годографов осей КА, полученных на основе обработки результатов измерений в жестко закрепленном на корпусе КА оптико-электронном приборе координат звезд и их звездных величин. Полученные оценки используются в качестве априорной информации при решении задачи навигации и ориентации на борту КА. При этом восстанавливается возможность функционирования системы автономной навигации и ориентации при аварийном пуске КА, либо при возникновении других нештатных ситуаций, связанных с потерей априорной (опорной) информации. Тем самым повышаются степень автономности и уровень надежности функционирования бортового комплекса управления, повышается степень боевой устойчивости и вероятности выполнения полетного задания. Данный способ обеспечивает расширение функциональных возможностей при автономном определении орбиты и ориентации КА в пространстве при отсутствии априорной информации.
В качестве способа-прототипа выбран способ определения и прогнозирования движения КА (патент РФ 2463223 С1; МПК B64G 3/00(2006.01); Опубликовано: 10.10.2012 Бюл. №28), согласно которому измеряют траекторные параметры КА на мерном интервале и записывают их в массив исходных измерений на заданном мерном интервале. Выполняют адаптивное уточнение среднего значения баллистического коэффициента нормированного среднеквадратического отклонения и интервала корреляции его вариаций. Массив априорных данных включает в себя число измерений на мерном интервале, значения среднеквадратических погрешностей компонентов вектора измерений, массив средних значений индексов солнечной и геомагнитной активности, а также массив заданных пользователем интервалов прогнозирования. Осуществляют расчет статистических характеристик погрешностей прогнозирования движения на мерном интервале и расчет весовой матрицы методом максимального правдоподобия. Вычисляют оценку вектора состояния КА на момент времени последнего измерения без учета атмосферного торможения. На основе остаточных невязок между измеренными и расчетными значениями параметров орбиты вычисляют оценки текущих и прогнозных значений баллистического коэффициента на основе остаточных невязок и на основе корреляции его вариации. Прогнозируют движение КА с учетом обращения к стандартным модулям интегрирования уравнений движения и расчета статистических характеристик погрешностей при прогнозировании движения. Способ обеспечивает определение и прогнозирование орбит КА, подверженных влиянию торможения в атмосфере.
К недостаткам способа-прототипа относится, в частности, то, что он предусматривает определение текущих параметров орбиты КА как расчетных параметров, вычисляемых на основе массива априорных данных, получаемых на мерных интервалах зон траекторных измерений, и не предусматривает возможности оперативного уточнения параметров орбиты КА вне зон проведения траекторных измерений.
Задачей, на решение которой направлено настоящее изобретение, является обеспечение расширения функциональных возможностей при решении задачи определения орбиты КА.
Технический результат, достигаемый при осуществлении настоящего изобретения, заключается в обеспечении определения (уточнения) параметров текущей орбиты КА, снабженного аппаратурой для съемки подстилающей поверхности, при нахождении КА вне зон траекторных / навигационных измерений.
Технический результат достигается тем, что в способе определения орбиты космического аппарата, включающем измерение исходных значений параметров орбиты космического аппарата и определение по ним значений времени и координат местоположений космического аппарата, дополнительно выполняют с космического аппарата первичную и через заданный интервал времени повторную съемку объекта наблюдения, находящегося вне плоскости орбиты в области подстилающей поверхности с измеренными значениями координат точек местности, по ортотрансформированным первичному и повторному снимкам объекта наблюдения определяют координаты точек поверхности планеты, соответствующих идентифицируемым точкам снимка, и определяют наборы точек, координаты которых с задаваемой точностью удовлетворяют уравнениям определения вершины конуса, лучи и ось которого проходят через точки поверхности планеты, соответствующие идентифицируемым точкам снимка, а угол раствора равен углу поля зрения съемочной аппаратуры, определяют вектор с началом в точке из набора, полученного для первичного снимка, и окончанием в точке из набора, полученного для повторного снимка, составляющий наименьший угол с расчетным вектором скорости космического аппарата, полученным из условия прохождения космического аппарата над объектом наблюдения, после чего за определяемую текущую орбиту космического аппарата принимают линию, проходящую в моменты выполнения снимков через точки начала и окончания упомянутого вектора.
Изобретение поясняется фиг. 1 и 2.
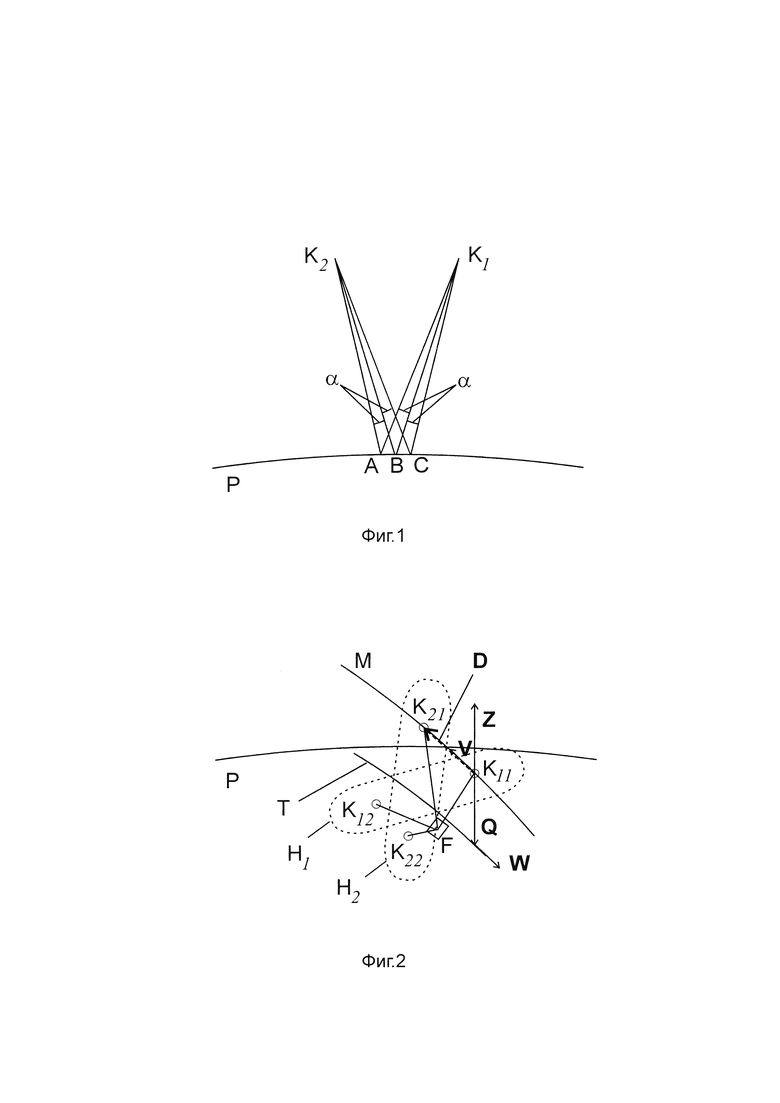
На фиг. 1 представлена схема выполнения снимка фотографируемой подстилающей поверхности, поясняющая получение точек в пространстве, координаты которых в связанной с планетой системе координат с задаваемой точностью удовлетворяют уравнениям определения вершины конуса, лучи и ось которого проходят через точки поверхности планеты, задаваемые определяемыми значениям географических координат и соответствующие задаваемым точкам снимка, а угол раствора равен углу поля зрения съемочной аппаратуры.
На фиг. 2 представлена схема, поясняющая определение точек, из которых производилась съемка.
На фиг. 1 обозначено:
Р - подстилающая поверхность;
В - точка центра снимка;
АВ, ВС - расстояния от точки В до краев снимка;
α - угол полураствора поля зрения съемочной аппаратуры;
K1, K2 - точки в пространстве, координаты которых с задаваемой точностью определены по ортотрансформированному снимку.
На фиг. 2 обозначено:
М - линия орбиты КА;
Р - подстилающая поверхность;
Т - линия трассы КА на подстилающей поверхности;
V - расчетный вектор скорости КА, полученный из условия прохождения КА в моменты съемки над объектом наблюдения на определенной восходящей или нисходящей ветви обриты;
Z - направление в зенит;
Q - направление в надир;
W - направление видимого с КА бега местности подстилающей поверхности;
F - объект наблюдения (центральная точка выполненных с КА снимков);
Kij, i=1, 2; j=1, 2 - точки в пространстве, координаты которых с задаваемой точностью определены по ортотрансформированным снимкам;
Hj, i=1, 2 - наборы точек в пространстве, координаты которых с задаваемой точностью определены по ортотрансформированным снимкам;
D=K11K21 - вектор с началом в точке из набора точек, полученного для первичного снимка, и окончанием в точке из набора точек, полученного для повторного снимка, составляющий наименьший угол с расчетным вектором скорости космического аппарата, полученным из условия прохождения космического аппарата в моменты съемки над объектом наблюдения на определенной восходящей или нисходящей ветви обриты.
Опишем действия предлагаемого способа.
Рассматриваем орбитальный КА, обращающийся вокруг Земли или другой планеты (Луна, Марс) с измеренными значениями пространственных координат точек поверхности планеты, снабженный аппаратурой для съемки подстилающей поверхности.
Считаем, что съемка объектов наблюдения на подстилающей поверхности выполняется установленной на КА съемочной аппаратурой, для которой заданы такие характеристики как угол поля зрения, фокусное расстояние, размер матрицы прибора с зарядовой связью и т.д.
Считаем, например, что при выполнении съемки объектов наблюдения на подстилающей поверхности ось визирования съемочной аппаратуры отклоняется от плоскости орбиты, при этом, учитывая, что точка пересечения оси визирования съемочной аппаратуры с подстилающей поверхностью перемещается по поверхности планеты в направлении видимого с КА бега местности, наведение оси визирования съемочной аппаратуры на снимаемые объекты наблюдения, задаваемые на поверхности планеты, выполняется поворотом оси визирования съемочной аппаратуры в направлении, перпендикулярном видимому с КА бегу местности (в плоскости, перпендикулярной вектору скорости КА).
В предлагаемом способе для определения орбиты КА используют результаты решения задачи определения по выполненным с КА снимкам подстилающей поверхности точек местоположений КА, из которых производилась съемка. Исходными данными для решения задачи определения местоположений КА, из которых производилась съемка, служат опознанные и координатно привязанные (ортотрансформированные) цифровые снимки - снимки, для которых рассчитаны географические координаты каждого пикселя изображения. При решении задачи на снимках анализируются «особые» пиксели - центральный пиксель снимка и пиксели, лежащие на окружности, вписанной в прямоугольник снимка. Поскольку координаты каждого пикселя после ортотрансформирования становятся известны, рассчитывается множество значений расстояний от центрального пикселя снимка до всех лежащих на окружности пикселей. Затем выбираются два противолежащих от центральной точки пикселя, расстояние между которыми является наибольшим.
Так как воображаемая окружность, вписанная в снимок, преобразуется на поверхности планеты в фигуру (пересечение сферы с конусом), близкую к эллипсу, то искомая точка съемки, лежащая в плоскости главного вертикала снимка, оказывается лежащей в плоскости, проходящей через центр снимка В, две найденные точки А и С «большой полуоси» этого «эллипса» (точки А и С определяются как точки, соответствующие максимальному расстоянию между ними) и центр планеты (обозначим его как О).
Таким образом, пространственная задача сводится к плоской задаче, показанной на фиг. 1. При решении математической задачи известны расстояния АВ и ВС; угол полураствора снимка (определяется как угол а полураствора поля зрения съемочной аппаратуры с учетом фокусного расстояния и размера матрицы прибора с зарядовой связью); угол между векторами АВ и ВС, учитывающий сферичность поверхности планеты. По результатам анализа всех известных углов и расстояний вычисляется расстояние от искомой точки съемки (обозначим ее как S) до центра снимка В.
При переходе от решения плоской задачи к решению пространственной задачи учитывается, что вектора ОВ и BS лежат в одной плоскости с векторами АВ и ВС и угол между ними известен. Используем систему координат OXYZ с центром в точке О, ось Y проходит через ОВ, ось X лежит в плоскости ОАВ и ось Z дополняет систему координат до правой. В системе OXYZ вектор BS имеет нулевую компоненту по координате Z, а компоненты по координатам X и У определяются как проекции BS на ОВ и направление, перпендикулярное ОВ.
Географические координаты точки В в результате ортотрансформирования снимка известны. Поэтому координаты радиус-вектора ОВ могут быть вычислены в некоторой базовой системе координат с началом в центре планеты. Таким образом, можно составить матрицу перехода от базовой системы координат к выбранной выше системе OXYZ и получить радиус-вектор OS (и, таким образом, искомое пространственное положение точки S) в базовой системе координат, связанной с положением центра масс планеты. В общем случае будет построено два положения точки S симметрично относительно линии ОВ. Определение истинного варианта положения точки съемки S осуществляют с применением предложенных в настоящем способе действий.
В предлагаемом способе при нахождении КА над областью подстилающей поверхности с измеренными значениями пространственных координат точек местности выполняют с КА первичную и через заданный интервал времени повторную съемку объекта наблюдения, находящегося вне плоскости орбиты КА в области подстилающей поверхности с измеренными значениями координат точек местности.
Условие съемки объекта наблюдения, находящегося вне плоскости орбиты КА - т.е. на не менее чем задаваемом расстоянии от плоскости орбиты КА или от трассы полета КА на поверхности планеты - эквивалентно условию съемки при отклоненном от плоскости орбиты КА положении оси визирования съемочной аппаратуры, направленной на объект наблюдения (при отличном от нуля значении угла между плоскостью орбиты КА и осью визирования съемочной аппаратуры, направленной на объект наблюдения).
По ортотрансформированным первичному и повторному снимкам объекта наблюдения определяют координаты точек поверхности планеты, соответствующих визуально идентифицируемым точкам снимка.
Определяют наборы точек, координаты которых с задаваемой точностью удовлетворяют уравнениям определения вершины конуса, лучи и ось которого проходят через точки поверхности планеты, соответствующие идентифицируемым точкам снимка, а угол раствора равен углу поля зрения съемочной аппаратуры.
Например, по ортотрансформированным снимкам определяют географические координаты точек поверхности планеты, соответствующих центральному пикселю снимка и пикселям, лежащим на вписанной в снимок окружности, и определяют наборы Hi, i=1,2 точек в пространстве Ki,j, j=1,2, координаты которых с задаваемой точностью удовлетворяют уравнениям определения вершины кругового конуса с углом раствора, равным углу поля зрения съемочной аппаратуры, лучи конуса проходят через определенные точки поверхности планеты, соответствующие пикселям, лежащим на вписанной в снимок окружности, а ось конуса проходит через определенную точку поверхности планеты, соответствующую центральному пикселю снимка.
Определяют вектор D (на рис. 2 показан случай D=K11K21) с началом в точке из упомянутого набора точек, полученного для первичного снимка, и окончанием в точке из упомянутого набора точек, полученного для повторного снимка, составляющий наименьший угол с расчетным вектором V скорости КА, полученным из условия прохождения КА в момент съемки над объектом наблюдения.
Определение расчетного вектора V скорости КА, получаемого из условия и на момент прохождения КА над конкретным объектом наблюдения, осуществляется с учетом возможности нахождения КА (в момент прохождения КА над объектом наблюдения) на восходящей (перемещение КА в направлении от южного полушария планеты в сторону северного полушария планеты) или нисходящей (перемещение КА в направлении от северного полушария планеты в сторону южного полушария планеты) ветви орбиты.
Определение, на какой из двух ветвей орбиты - на восходящей или на нисходящей ветвях орбиты - находится КА при его прохождении над объектом наблюдения на поверхности планеты, реализуется посредством определения направления проекции вектора скорости КА на ось вращения планеты:
- нахождение КА на восходящей ветви орбиты соответствует случаю, когда направление проекции вектора скорости КА на ось вращения планеты совпадает с направлением угловой скорости вращения планеты;
- нахождение КА на нисходящей ветви орбиты соответствует случаю, когда направление проекции вектора скорости КА на ось вращения планеты противоположно направлению угловой скорости вращения планеты.
Например, для случая околокруговой орбиты КА расчетный вектор V скорости КА определяется как вектор скорости в точке витка орбиты, заданной следующим расчетными значениями аргумента широты u и долготы восходящего узла орбиты  (Повышение информативности наблюдения наземных объектов с ИСЗ // Космические исследования. 1990. Т. 28. Вып. 1. с. 56-68):
(Повышение информативности наблюдения наземных объектов с ИСЗ // Космические исследования. 1990. Т. 28. Вып. 1. с. 56-68):
- в случае прохождения КА над объектом наблюдения на восходящей ветви витка орбиты

- в случае прохождения КА над объектом наблюдения на нисходящей ветви витка орбиты

где i - наклонение орбиты КА;
λ, ϕ - долгота и широта объекта наблюдения.
При этом для объектов наблюдения, широта ср которых и наклонение орбиты i достаточно близки по модулю, получаемые значения  достаточно близки к значениям
достаточно близки к значениям  В этом случае искомый расчетный вектор V скорости КА определяется, например, как средний из расчетных векторов скорости КА для восходящей и для нисходящей ветвей орбиты. Также искомый вектор D может быть определен как вектор, минимально отклоненный от обоих векторов скорости КА - для восходящей и для нисходящей ветвей орбиты (минимизируется сумма отклонений вектора D от данных векторов).
В этом случае искомый расчетный вектор V скорости КА определяется, например, как средний из расчетных векторов скорости КА для восходящей и для нисходящей ветвей орбиты. Также искомый вектор D может быть определен как вектор, минимально отклоненный от обоих векторов скорости КА - для восходящей и для нисходящей ветвей орбиты (минимизируется сумма отклонений вектора D от данных векторов).
Определение описанной характеристики местоположения КА на орбите в момент выполнения съемки (нахождение КА на восходящей ветви орбиты, на нисходящей ветви орбиты, в зоне перехода между ветвями - от восходящей к нисходящей и от нисходящей к восходящей) осуществляется по прогнозируемым параметрам орбиты (прогнозируемым на основе предварительно выполненных измерений исходных значений параметров орбиты КА), при этом для определения искомой характеристики местоположения КА на орбите достаточно прогнозировать положение КА с грубой точностью - до  периода обращения КА.
периода обращения КА.
После чего за определяемую текущую орбиту КА принимают определяемые (прогнозируемые) значения времени и координат местоположений КА, составляющие линию, проходящую в моменты выполнения снимков через точки начала и окончания определенного вектора D (т.е. за определяемые точки орбиты КА на моменты выполнения съемки принимают точки начала и окончания определенного вектора D).
В ходе дальнейшего полета КА через заданное время (через интервал времени более задаваемой продолжительности) повторяют вышеописанные действия и получают множество векторов {D}, каждый из которых имеет начало в точке из упомянутого набора точек, полученного для соответствующего первичного снимка, и окончание в точке из упомянутого набора точек, полученного для соответствующего повторного снимка, и составляет наименьший угол с соответствующим расчетным вектором скорости КА, определенным из условия прохождения КА в моменты съемки над объектом наблюдения на соответствующей определенной восходящей или нисходящей ветви обриты КА.
После этого за определяемую орбиту КА принимают расчетные значения координат местоположений КА, составляющие линию, проходящую в моменты выполнения снимков через точки начала и окончания каждого вектора из упомянутого множества векторов {D}. При этом расчетные значения координат местоположений КА получают путем решения (интегрирования) уравнений движения КА при начальных условиях движения КА, определяемых исходными измеренными значениями параметров орбиты КА, и при условии прохождения линии орбиты КА в моменты выполнения снимков через полученные точки начала и окончания упомянутых векторов D.
В предлагаемом способе условие выполнения повторной съемки объекта наблюдения через заданный интервал времени после первичной съемки (обозначим продолжительность данного интервала времени как ΔT) обеспечивает необходимый уровень удаленности искомых точек съемки, который гарантирует необходимую точность (единственность) получения искомого вектора D.
В предлагаемом способе повторение через задаваемое время (через интервал времени более задаваемой продолжительности, который обозначим как ΔР) описанных действий начиная с выполнения первичной и повторной съемки выбранного объекта наблюдения на подстилающей поверхности (при этом объекты наблюдения могут как различаться, так и повторяться) обеспечивает необходимый уровень удаленности вдоль орбиты искомых точек съемки, который гарантирует, что точки начала и окончания найденного вектора D, которые являются местоположениями КА на моменты выполнения первой серии из двух снимков, удалены от точек начала и окончания найденного вектора D, которые являются местоположениями КА на моменты выполнения повторной серии из двух снимков, на расстояние, величина которого определяется требованиями точности к получаемому решению уравнений движения КА.
Отметим, что для получения более точного решения уравнений движения КА рекомендуется неоднократное повторение через задаваемое время (через интервал времени более задаваемой продолжительности) описанных действий по выполнению серий съемки объектов наблюдения на подстилающей поверхности.
К упомянутым точностям (погрешностям) задания параметров съемочной аппаратуры можно отнести, например, неточность изготовления и установки объектива, несовпадение истинного фокусного расстояния с реальным, неточность установки отсчета времени в аппаратуре (например, при синхронизации времени вручную) и т.п.
Опишем технический эффект предлагаемого изобретения.
Предложенное техническое решение обеспечивает определение (уточнение) параметров текущей орбиты КА, снабженного аппаратурой для съемки подстилающей поверхности при нахождении КА вне зон траекторных/навигационных измерений, при этом предлагаемый способ не требует наличия на этапе обработки снимков точных данных о движении КА - все необходимые данные о движении КА сведены к данным, требуемым для определения характеристики ветви орбиты КА (восходящая или нисходящая ветвь), на которой находился КА при выполнении съемки, для чего достаточно прогнозировать положение КА с грубой точностью - до  периода обращения КА.
периода обращения КА.
В качестве планеты обращения КА может рассматриваться как Земля, так и Луна и Марс.
Достигаемый технический результат существенно расширяет функциональные возможности решения задачи определения орбиты КА.
Особенно важность указанного положительного эффекта проявляется при применении предлагаемого технического решения в условиях, когда возможности использования штатных технических средств траекторных/навигационных измерений орбиты КА ограничены или недоступны.
Промышленное исполнение существенных признаков, характеризующих изобретение, не является сложным и может быть выполнено по известным технологиям.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРБИТЫ КОСМИЧЕСКОГО АППАРАТА С АППАРАТУРОЙ ДЛЯ СЪЕМКИ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ | 2019 |
|
RU2709978C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРБИТЫ КОСМИЧЕСКОГО АППАРАТА С АППАРАТУРОЙ ДЛЯ СЪЁМКИ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ | 2019 |
|
RU2711834C1 |
| СПОСОБ ПРИВЯЗКИ ВЫПОЛНЕННЫХ С КОСМИЧЕСКОГО АППАРАТА СНИМКОВ ЗЕМНОЙ ПОВЕРХНОСТИ | 2019 |
|
RU2711775C1 |
| СПОСОБ ПРИВЯЗКИ ВЫПОЛНЕННЫХ С ОРБИТАЛЬНОГО КОСМИЧЕСКОГО АППАРАТА СНИМКОВ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ | 2019 |
|
RU2712781C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВРЕМЕННОЙ ПРИВЯЗКИ ПРОИЗВОДИМЫХ С КОСМИЧЕСКОГО АППАРАТА СНИМКОВ ЗЕМНОЙ ПОВЕРХНОСТИ | 2016 |
|
RU2654883C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ С КОСМИЧЕСКОГО АППАРАТА КООРДИНАТ ИСТОЧНИКА КОЛЬЦЕВЫХ ВОЛН НА ВОДНОЙ ПОВЕРХНОСТИ | 2016 |
|
RU2640944C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ФРОНТАЛЬНОЙ ЧАСТИ ЛЕДНИКА С НАХОДЯЩЕГОСЯ НА ОКОЛОКРУГОВОЙ ОРБИТЕ КОСМИЧЕСКОГО АППАРАТА | 2016 |
|
RU2642544C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЫСОТЫ ОБЛАЧНОСТИ | 2014 |
|
RU2583877C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЫСОТЫ ОБЛАЧНОСТИ (ВАРИАНТЫ) | 2014 |
|
RU2583954C2 |
| СПОСОБ УПРАВЛЕНИЯ СПУСКОМ КОСМИЧЕСКОГО АППАРАТА ПРИ ПРОВЕДЕНИИ НАБЛЮДЕНИЙ | 2014 |
|
RU2587763C2 |
Изобретение относится к способам слежения за полётом космических аппаратов (КА). Способ включает измерение исходных параметров орбиты КА и определение по ним времени и координат КА. Дополнительно выполняют с КА первичную и через заданное время повторную съемку объекта наблюдения, находящегося вне плоскости орбиты на подстилающей поверхности (ПП) с измеренными координатами точек местности. По ортотрансформированным первичному и повторному снимкам определяют координаты точек ПП, соответствующих идентифицируемым точкам снимка. Из этих точек определяют наборы, координаты точек которых с задаваемой точностью удовлетворяют уравнениям определения вершины конуса, лучи и ось которого проходят через данные точки ПП, а угол раствора равен углу поля зрения съемочной аппаратуры. Определяют вектор с началом в точке из набора для первичного снимка и концом в точке из набора для повторного снимка, составляющий наименьший угол с расчетным вектором скорости КА при прохождении КА над объектом наблюдения. За текущую орбиту КА принимают линию, проходящую в моменты выполнения снимков через начало и конец упомянутого вектора. Технический результат состоит в определении параметров орбиты вне зон траекторных измерений. 2 ил.
Способ определения орбиты космического аппарата, включающий измерение исходных значений параметров орбиты космического аппарата и определение по ним значений времени и координат местоположений космического аппарата, отличающийся тем, что выполняют с космического аппарата первичную и через заданный интервал времени повторную съемку объекта наблюдения, находящегося вне плоскости орбиты в области подстилающей поверхности с измеренными значениями координат точек местности, по ортотрансформированным первичному и повторному снимкам объекта наблюдения определяют координаты точек поверхности планеты, соответствующих идентифицируемым точкам снимка, и определяют наборы точек, координаты которых с задаваемой точностью удовлетворяют уравнениям определения вершины конуса, лучи и ось которого проходят через точки поверхности планеты, соответствующие идентифицируемым точкам снимка, а угол раствора равен углу поля зрения съемочной аппаратуры, определяют вектор с началом в точке из набора, полученного для первичного снимка, и окончанием в точке из набора, полученного для повторного снимка, составляющий наименьший угол с расчетным вектором скорости космического аппарата, полученным из условия прохождения космического аппарата над объектом наблюдения, после чего за определяемую текущую орбиту космического аппарата принимают линию, проходящую в моменты выполнения снимков через точки начала и окончания упомянутого вектора.
| СПОСОБ ОПРЕДЕЛЕНИЯ И ПРОГНОЗИРОВАНИЯ ДВИЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА НА НИЗКИХ ОРБИТАХ, ПОДВЕРЖЕННОГО ВЛИЯНИЮ ТОРМОЖЕНИЯ В АТМОСФЕРЕ | 2011 |
|
RU2463223C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА ПО РАДИОЛОКАЦИОННОМУ ИЗОБРАЖЕНИЮ | 2017 |
|
RU2656366C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ С КОСМИЧЕСКОГО АППАРАТА КООРДИНАТ ИСТОЧНИКА КОЛЬЦЕВЫХ ВОЛН НА ВОДНОЙ ПОВЕРХНОСТИ | 2016 |
|
RU2640944C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВРЕМЕННОЙ ПРИВЯЗКИ ПРОИЗВОДИМЫХ С КОСМИЧЕСКОГО АППАРАТА СНИМКОВ ЗЕМНОЙ ПОВЕРХНОСТИ | 2016 |
|
RU2654883C2 |
| US 3362657 А, 09.01.1968. | |||

