Изобретение относится к фотограмметрии, в частности к способам фотограмметрической обработки сканерных снимков, и может быть использовано в системах дистанционного зондирования Земли.
Снимки, полученные с применением съемочных систем дистанционного зондирования Земли, содержат ряд искажений, величины которых определяются углом наклона оптической оси съемочной системы и колебанием рельефа местности. В связи с этим использование снимков без их предварительного трансформирования, ограничивается влиянием указанных искажений.
Кроме того, особенностью сканерных снимков является распределенное по времени построение изображения, то есть в таком снимке строки или столбцы формируются последовательно в разные моменты времени за счет перемещения либо самой съемочной системы, установленной на движущемся относительно подстилающей поверхности носителе, либо за счет перемещения сканирующего зеркала в направлении, перпендикулярном направлению полета.
Съемочные системы, в которых реализован принцип формирования изображения с применением сканирующего зеркала, принято называть панорамными сканирующими съемочными системами, а формируемые такими системами снимки - панорамными сканерными снимками. Сканирующие съемочные системы, выполняющие съемку в видимой области спектра ввиду наличия на рынке фотоприемных устройств субматричного типа (линеек) с количеством элементов, достигающим нескольких тысяч, в основном построены согласно первому варианту сканирования.
Сканирующие съемочные системы, формирующие изображение в длинноволновой инфракрасной области (ИК) спектра не могут обеспечить широкую полосу захвата во время съемки, при построении снимков согласно первому варианту сканирования ввиду отсутствия на рынке фотоприемных устройств субматричного типа с большим количеством элементов, работающих в длинноволновой инфракрасной области спектра.
Поэтому для сканирующих съемочных систем, формирующих изображение в длинноволновой ИК области спектра актуален вариант сканирования с использованием сканирующего зеркала.
Принцип формирования изображения в панорамных сканирующих съемочных системах приводит к необходимости применения способов трансформирования, отличных от способов для трансформирования кадровых снимков, в которых все строки регистрируются в один момент времени.
Известен способ фотограмметрической обработки панорамных сканерных снимков (Фотограмметрия. [Текст]: учеб. пособие / Краснопевцев Б.В. - М.: УПП "Репрография" МИИГАиК, 2008. - с. 134-136), основанный на том допущении, что если фотокамера и объект съемки неподвижны, то полученное изображение будет представлять собой центральную проекцию на цилиндрическую поверхность. Измерив в координатной системе исходного панорамного сканерного снимка координаты пикселей изображения, их преобразуют в координатную систему кадрового снимка и дальнейшую аналитическую обработку выполняют по формулам вычисления плановых координат точек объекта в его системе координат по координатам пикселей наклонного кадрового снимка, в котором все строки кадра регистрируются в один момент времени.
Однако такой способ обработки является строгим при условии, что съемка производится неподвижной фотокамерой.
Если съемочная аппаратура смещается относительно объекта съемки, то происходит деформация изображения, которую, исходя из технических параметров панорамной фотокамеры и условий фотосъемки, компенсируют, вычислив величину смещения изображения и введя в измеренные координаты поправки.
Основным недостатком способа-аналога является низкая точность фотограмметрической обработки, являющаяся следствием того, что известный способ обработки не является строгим при условии перемещения съемочной аппаратуры, находящейся на авиационном носителе.
Прототипом является способ трансформирования космических сканерных снимков (Трансформирование космических снимков с использованием программного комплекса ENVI [Текст]: учеб. пособие / Л.Г. Евстратова - Новосибирск: СГГА, 2008. - с. 13-20), в котором изображение формируется построчно, причем строка изображения формируется в соответствии с принципами сканерной съемочной системы, а полное изображение получается за счет сложения строк при движении носителя. Данный способ основан на восстановлении связки проектирующих лучей, формирующих строку изображения снимка, и на вычислении элементов внешнего ориентирования: положение точки снимка каждой строки и угловых элементов ориентирования для каждой строки.
Данный способ трансформирования сканерных космических снимков, учитывает их строчную структуру и то, что строки формируются последовательно в разные моменты времени, причем все элементы строки изображения формируются в один момент времени. Согласно данному способу, на первом этапе трансформирования обрабатывают отдельно каждую строку сканерного снимка, а именно, по координатам (xi, yi) пикселя на строке сканерного снимка с применением математических моделей, устанавливающих связь между координатами пикселей исходного и трансформированного снимка, вычисляются координаты пикселей на трансформированном снимке:

где  - оператор трансформирования.
- оператор трансформирования.
На втором этапе пикселям в матрице трансформированного снимка присваивают значения интенсивности соответствующих пикселей на сканерном снимке. В процессе выполнения первого этапа могут возникать пропуски пикселей в матрице трансформированного снимка. Для вычисления значений интенсивности пропущенных выполняют интерполирование значений интенсивности соседних пикселей в матрице трансформированного снимка.
Таким образом, данный способ предназначен для обработки сканерных снимков, в котором из отдельных строк формируется один сканерный снимок, который затем преобразуют в трансформированный снимок.
Однако, при использовании панорамных сканирующих съемочных систем, когда сканирование выполняется качающимся зеркалом в направлении, перпендикулярном направлению полета, за один проход качающегося зеркала создается один сканерный снимок, состоящий из отдельных столбцов, сформированных в разные моменты времени, при этом все элементы столбца изображения формируются в один момент времени. В процессе прямолинейного перемещения носителя формируется множество сканерных снимков, а трансформированный снимок формируется в результате трансформирования нескольких сканерных снимков, количество которых определяется оператором исходя из удобства просмотра итоговых трансформированных снимков или особенностями технических средств.
Способ обработки, указанный в прототипе, применим и к снимкам, полученным панорамными сканирующими съемочными системами, если на первом этапе обрабатывать отдельно каждый столбец, а не строку, сканерного снимка, учитывая, что и строка и столбец представляют собой блок, шириной один пиксель.
Таким образом, в прототипе обрабатывают отдельно каждый блок, шириной в один пиксель, устанавливают связь координат пикселей сканерного снимка и трансформированного снимка, копируют значения интенсивности пикселей сканерного снимка в трансформированный снимок, при этом значения интенсивности пропущенных пикселей в матрице трансформированного снимка определяют интерполированием.
Основным недостатком прототипа, в случае применения к снимкам, полученным панорамными сканирующими съемочными системами, является появление искажений на изображении трансформированного снимка при его формировании из нескольких сканерных снимков.
Указанные искажения проявляются в виде точечных всплесков уровней интенсивности пикселей на трансформированном снимке. Всплески уровней интенсивности появляются при совпадении вычисленных координат на трансформированном снимке для некоторых пикселей одного сканерного снимка с координатами пропущенных пикселей на трансформированном снимке, полученных при выполнении трансформирования другого, как правило смежного первому, сканерного снимка.
Задачей изобретения является разработка способа обработки сканерных снимков, в котором устранены недостатки аналога и прототипа.
Техническим результатом изобретения является устранение на изображении искажений и, как следствие, повышение информативности за счет корректного определения значений интенсивности пропущенных пикселей на трансформированном снимке.
Технический результат достигается тем, что в способе обработки сканерных снимков, в котором изображение формируют блоками, шириной в один пиксель, причем каждый блок изображения формируют в соответствии с принципами сканирующей съемочной системы, а полное изображение получают за счет сложения блоков, с последующим трансформированием сканерных снимков, при этом в сканерном снимке обрабатывают отдельно каждый блок, шириной в один пиксель, устанавливают связь координат пикселей сканерного снимка и трансформированного снимка, копируют значения интенсивности пикселей сканерного снимка в трансформированный снимок, при этом значения интенсивности пропущенных пикселей в трансформированном снимке определяют интерполированием, согласно настоящему изобретению, один трансформированный снимок формируют из нескольких сканерных снимков, при этом для каждого сканерного снимка создают карту артефактов с информацией о пропущенных и заполненных пикселях на соответствующих участках трансформированного снимка, для каждого текущего обрабатываемого сканерного снимка копирование значений интенсивности пикселей в трансформированный снимок выполняют с учетом карты артефактов предыдущего обработанного сканерного снимка, причем в случае совпадения в трансформированном снимке вычисленных координат пикселей для текущего и предыдущего обработанного сканерных снимков, значения интенсивности пикселей текущего сканерного снимка в трансформированный снимок не копируют.
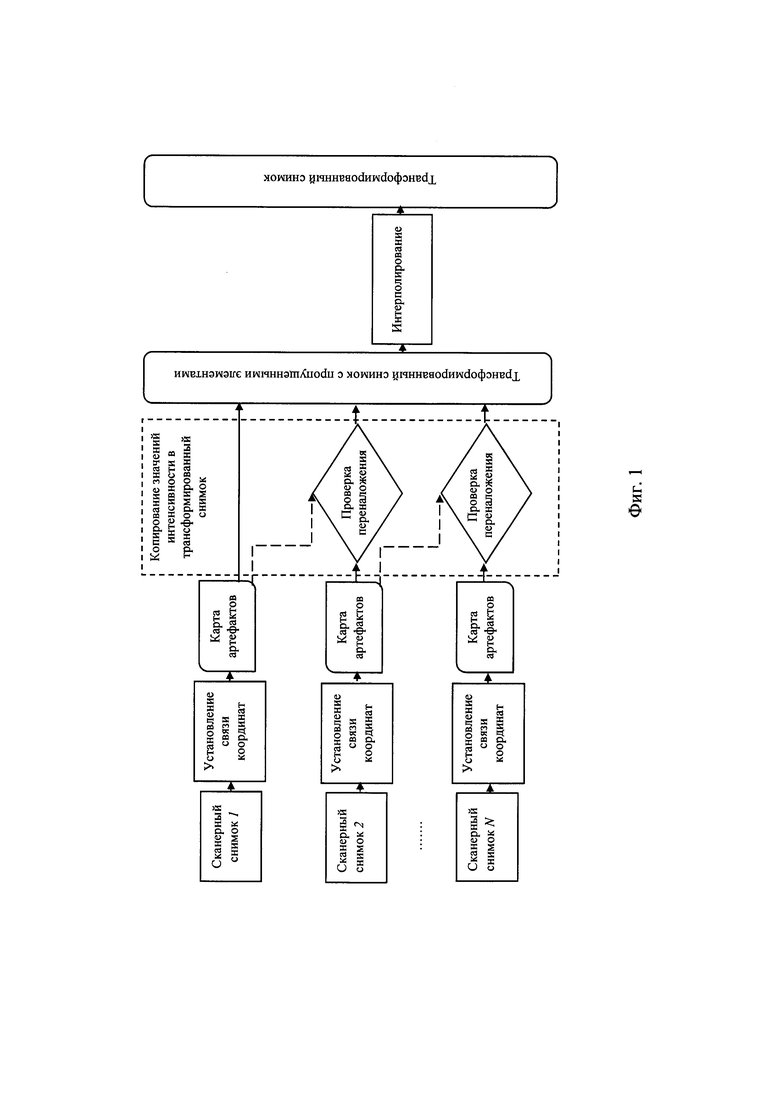
На фиг. 1 представлена блок-схема, поясняющая осуществление способа обработки сканерных снимков, его основные этапы и их последовательность.
На фиг. 2а представлены исходные сканерные снимки, количество N=4.
На фиг. 2б представлены карты артефактов, количество N=4.
На фиг. 2в представлен фрагмент трансформированного снимка после выполнения копирования значений интенсивности пикселей из сканерных снимков с пропущенными пикселями.
На фиг. 2г фрагмент трансформированного снимка после выполнения интерполирования для заполнения пропущенных пикселей.
На фиг. 3 схематично представлены фрагменты двух сканерных и трансформированного снимков с отдельными столбцами и элементами (пиксели).
Способ обработки сканерных снимков осуществляется следующим образом.
Сканерные снимки формируют с помощью панорамной сканирующей съемочной системы и сохраняют в запоминающем устройстве.
Зеркало сканирующей съемочной системы, совершающее колебательные движения, располагают перед входным объективом, что обеспечивает необходимую ширину полосы просмотра подстилающей поверхности.
За время движения сканирующего зеркала в одном направлении получают данные с приемника излучения, формируют один цифровой сканерный снимок и сохраняют его на запоминающее устройство.
В процессе выполнения регистрации теплового излучения подстилающей поверхности формируют множество цифровых сканерных снимков.
При этом в момент съемки с помощью спутниково-инерциальной навигационной системы регистрируют географические координаты: XS, YS, ZS и углы ориентации съемочной аппаратуры (тангаж α, крен Ω, азимут k), используемые для определения географических координат наблюдаемых объектов на цифровых изображениях.
Все зарегистрированные данные со спутниково-инерциальной навигационной системы также сохраняют на запоминающее устройство.
За один проход зеркала создают один сканерный снимок, за время работы съемочной системы формируют множество сканерных снимков, при этом, трансформированный снимок формируют в результате трансформирования нескольких сканерных снимков (фиг. 1).
По полученным численным значениям углов ориентации α, Ω, k съемочной аппаратуры вычисляют величины направляющих косинусов:
Величины направляющих косинусов используют для вычисления координат каждого пикселя сканерного снимка (X, Y) в трансформированном снимке (прямое трансформирование).
Причем, так как в сканерном снимке обрабатывается каждый столбец отдельно, то применяют формулы трансформирования кадровых снимков, учитывающие для каждого пикселя столбца изображения высоту соответствующей точки подстилающей поверхности над уровнем моря Z.
Используются формулы трансформирования (Фотограмметрия [Текст]: учеб. пособие / Б.В. Краснопевцев - М: УПП «Репрография» МИМИИГАиК, 2008. - с. 65, формула 5.30):


Отличием предлагаемого способа является то, что трансформированный снимок формируется из нескольких сканерных снимков (фиг. 2а), при этом для каждого сканерного снимка на запоминающем устройстве создают отдельную карту артефактов (фиг. 2б). Карта артефактов содержит информацию о пропущенных пикселях и заполненных пикселях в трансформированном снимке.
Карта артефактов представляет собой цифровую таблицу, количество строк и столбцов в которой равно количеству строк и столбцов в трансформированном снимке. В ячейках каждой карты артефактов хранятся следующие данные:
- численный индикатор заполнения. Значение 0 присваивают тому элементу карты артефактов, которому соответствует пропущенный пиксель в трансформированном снимке, а значение 1 присваивают элементу карты артефактов, которому соответствует заполненный пиксель в трансформированном снимке;
- вычисленные значения координат [X, Y] (формула 3), если пиксель заполнен (численный индикатор заполнения равен 1).
Далее происходит копирование интенсивности пикселей сканерного снимка на трансформированный снимок, на основании вычисленных координат. При этом, копирование происходит только в том случае, если соответствующий пиксель трансформированного изображения не был отмечен ранее как заполненный или пропущенный, согласно картам артефактов смежных сканерных снимков (фиг. 2в).
На фиг. 3 символами Р11, Р12, Р13, Р14, P15, P16 обозначены пиксели первого сканерного снимка, символами Р21, Р22, P23, P24, P25, P26 обозначены пиксели второго сканерного снимка, символом х1 обозначен пропущенный пиксель, отмеченный в карте артефактов первого снимка, а символом х2 обозначен пропущенный пиксель, отмеченный в карте артефактов второго снимка. Показан случай, когда координаты пикселей Р21, P22 совпали с вычисленными координатами пикселей х1, Р16, отмеченных в карте артефактов первого сканерного снимка. В результате проверки переналожения интенсивности пикселей Р21, Р22 в ячейки трансформированного снимка х1, Р16 не копируются.
Далее для каждого пропущенного пикселя на трансформированном снимке выполняют вычисление интенсивности путем интерполирования значений интенсивности соседних пикселей (фиг. 2г).
Таким образом, использование предлагаемого способа позволит, по сравнению с прототипом, устранить искажения, проявляющиеся в виде точечных всплесков уровней интенсивности пикселей на трансформированном снимке, что в свою очередь позволит повысить информативность полученных снимков.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ЗОНДИРОВАНИЯ ЗЕМЛИ В ИНФРАКРАСНОЙ ОБЛАСТИ СПЕКТРА | 2023 |
|
RU2815392C1 |
| СИСТЕМА И СПОСОБ СКАНИРОВАНИЯ И КОПИРОВАНИЯ | 2004 |
|
RU2368091C2 |
| СПОСОБ ИДЕНТИФИКАЦИИ ОПОРНЫХ ТОЧЕК НА КОСМИЧЕСКИХ ИЗОБРАЖЕНИЯХ МЕСТНОСТИ ПРИ ОТСУТСТВИИ ПАРАМЕТРОВ ГЕОГРАФИЧЕСКОЙ ПРИВЯЗКИ | 2021 |
|
RU2768219C1 |
| СПОСОБ ОЦЕНКИ ИНФОРМАТИВНОСТИ РЕНТГЕНОВСКОГО СНИМКА | 2006 |
|
RU2306675C1 |
| СПОСОБ ОПЕРАТИВНОГО ОПРЕДЕЛЕНИЯ УГЛОВЫХ ЭЛЕМЕНТОВ ВНЕШНЕГО ОРИЕНТИРОВАНИЯ КОСМИЧЕСКОГО СКАНЕРНОГО СНИМКА | 2015 |
|
RU2597024C1 |
| СПОСОБ ДИСТАНЦИОННОГО ОБСЛЕДОВАНИЯ ОБЪЕКТОВ ЭЛЕКТРИЧЕСКИХ СЕТЕЙ С ПОМОЩЬЮ ТЕПЛОВИДЕОСЪЕМОЧНОГО УСТРОЙСТВА | 2004 |
|
RU2258204C1 |
| СПОСОБ УСТРАНЕНИЯ ГЕОМЕТРИЧЕСКИХ ИСКАЖЕНИЙ ИЗОБРАЖЕНИЙ ДИСТАНЦИОННОГО ЗОНДИРОВАНИЯ, ПОЛУЧЕННЫХ ЩЕЛЕВЫМ СКАНИРУЮЩИМ СЕНСОРОМ | 2016 |
|
RU2641630C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА НАКЛОНА ПЛОСКОСТИ АЭРОКОСМИЧЕСКОГО ИЗОБРАЖЕНИЯ МЕСТНОСТИ | 2015 |
|
RU2578270C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ КОМПОНОВКИ ЛАНДШАФТНЫХ ПАНОРАМНЫХ ИЗОБРАЖЕНИЙ | 2008 |
|
RU2384882C1 |
| Способ эффективного кодирования и декодирования цифрового изображения | 2019 |
|
RU2723896C1 |


Изобретение относится к фотограмметрии, в частности к способам фотограмметрической обработки сканерных снимков. В способе обработки сканерных снимков изображение формируют блоками шириной в один пиксель. Полное изображение получают за счет сложения блоков с последующим трансформированием сканерных снимков. Затем устанавливают связь координат пикселей сканерного и трансформированного снимков, копируют значения интенсивности пикселей сканерного снимка в трансформированный снимок. Значения интенсивности пропущенных пикселей в трансформированном снимке определяют интерполированием. При этом один трансформированный снимок формируют из нескольких сканерных снимков, для каждого из которых создают карту артефактов с информацией о пропущенных и заполненных пикселях на соответствующих участках трансформированного снимка. Для каждого текущего обрабатываемого сканерного снимка копирование значений интенсивности пикселей в трансформированный снимок выполняют с учетом карты артефактов предыдущего обработанного сканерного снимка. При совпадении в трансформированном снимке вычисленных координат пикселей для текущего и предыдущего обработанного сканерных снимков значения интенсивности пикселей текущего сканерного снимка в трансформированный снимок не копируют. Технический результат заявленного способа состоит в устранении на изображении искажений и, как следствие, повышении информативности за счет корректного определения значений интенсивности пропущенных пикселей на трансформированном снимке. 3 ил.
Способ обработки сканерных снимков, в котором изображение формируют блоками шириной в один пиксель, причем каждый блок изображения формируют в соответствии с принципами сканирующей съемочной системы, а полное изображение получают за счет сложения блоков с последующим трансформированием сканерных снимков, при этом в сканерном снимке обрабатывают отдельно каждый блок шириной в один пиксель, устанавливают связь координат пикселей сканерного снимка и трансформированного снимка, копируют значения интенсивности пикселей сканерного снимка в трансформированный снимок, при этом значения интенсивности пропущенных пикселей в трансформированном снимке определяют интерполированием, отличающийся тем, что один трансформированный снимок формируют из нескольких сканерных снимков, при этом для каждого сканерного снимка создают карту артефактов с информацией о пропущенных и заполненных пикселях на соответствующих участках трансформированного снимка, для каждого текущего обрабатываемого сканерного снимка копирование значений интенсивности пикселей в трансформированный снимок выполняют с учетом карты артефактов предыдущего обработанного сканерного снимка, причем в случае совпадения в трансформированном снимке вычисленных координат пикселей для текущего и предыдущего обработанного сканерных снимков значения интенсивности пикселей текущего сканерного снимка в трансформированный снимок не копируют.
| Трансформирование космических снимков с использованием программного комплекса ENVI | |||
| Новосибирск, СГГА, 2008 | |||
| Способ радиометрической коррекции скановой структуры изображения от многоэлементного фотоприёмника многозонального сканирующего устройства | 2019 |
|
RU2702849C1 |
| СПОСОБ КОРРЕКЦИИ НЕОДНОРОДНОСТИ СКАНИРУЮЩИХ МНОГОЭЛЕМЕНТНЫХ ФОТОПРИЕМНЫХ УСТРОЙСТВ ПО СИГНАЛАМ СЦЕНЫ | 2007 |
|
RU2347324C1 |
| US 20140029850 A1, 30.01.2014 | |||
| EP 1198951 A1, 24.04.2002. | |||
