ПЕРЕКРЕСТНЫЕ ССЫЛКИ НА РОДСТВЕННЫЕ ЗАЯВКИ
Настоящая заявка притязает на приоритет предварительной заявки US 61/421952, поданной 10 декабря 2010 г., описание которой включено сюда полностью путем ссылки на нее.
ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к ослаблению магнитного поля в электродвигателе с постоянными магнитами.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Существует необходимость в энергоэкономичных электрических машинах, которые обладают высокой способностью по крутящему моменту в широком диапазоне частот вращения и способностью к управлению частотой вращения машины, в частности, применительно к электрическим приводам для транспортных средств, таких как электрические или гибридные транспортные средства, или к другим задачам генерации электроэнергии, которые требуют высокого крутящего момента при нулевой или низкой частоте вращения.
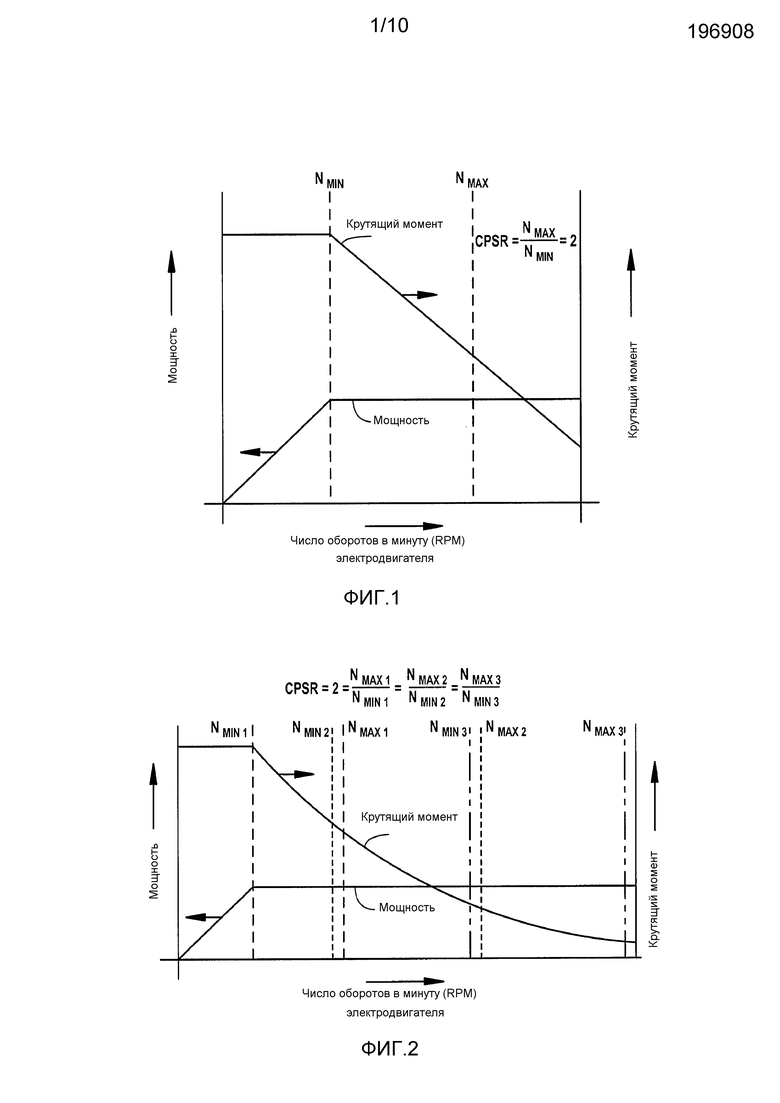
С целью обеспечения тяговой мощности, например, в электрических транспортных средствах желательно иметь электродвигатель с высоким отношением частот вращения при постоянной мощности (CPSR=constant power speed ratio). На фиг. 1 показан график зависимости крутящего момента от частоты вращения для электродвигателя. При низкой частоте вращения достигается высокий крутящий момент, и такой крутящий момент способствует запуску. При достижении значения Nmin достигается максимальная мощность электродвигателя, и далее мощность не повышается при дальнейшем повышении частоты вращения. Напомним, что P=2*π*T*N; когда мощность, Р, остается постоянной, при увеличении частоты вращения, N, крутящий момент, Т, уменьшается. CPSR определяется как максимальная частота вращения (Nmax), при которой может быть обеспечена номинальная мощность, деленная на наименьшую частоту вращения (Nmin), при которой обеспечивается максимальная мощность. Nmin определяется также как наивысшая частота вращения, при которой может быть обеспечен номинальный максимальный крутящий момент. Максимальная частота вращения (Nmax) ограничивается в основном предельным значением напряжения противо-ЭДС, а также нанесением повреждения ротору или другими ограничениями, присущими электродвигателю. В примере, показанном на рис. 1, отношение CPSR равно 2.
Желательно иметь CPSR равным четырем или более для автотранспортных применений. Пусть даже можно добиться того, что по сравнению с технологиями асинхронных электродвигателей, электродвигателей с обмотками возбуждения или электродвигателей с регулируемым магнитным сопротивлением электродвигатели с постоянными магнитами будут предпочтительны вследствие их более высокой плотности мощности и более высокой эффективности. Однако электродвигатели с постоянными магнитами (РМ) не обладают по своей природе таким высоким CPSR. Затрачиваются достаточно большие усилия для отыскания экономичных, легко выполнимых и эффективных решений, направленных на ограниченный CPSR РМ электродвигателей.
Одной альтернативой является обеспечение трансмиссии между электродвигателем и конечным приводом. Однако трансмиссии тяжелы, дороги и должны управляться либо оператором, либо контроллером. Другой альтернативой является электрическая регулировка напряженности поля электродвигателя, если он имеет электрически возбуждаемые обмотки возбуждения. Такой подход неприменим к электродвигателям, поля которых создаются постоянными магнитами.
Другой подход заключается в ослаблении магнитного поля, и тем самым в повышении частоты вращения электродвигателя при данной противо-ЭДС или приложенном напряжении. Применительно к любому данному электродвигателю производимый крутящий момент пропорционален току, умноженному на напряженность магнитного поля, тогда как число оборотов в минуту (RPM) пропорционально напряжению/напряженности поля. Так что для заданной мощности (напряжение*ток) электродвигатель обеспечивает определенную величину механической энергии (T*N). Если магнитное поле будет ослаблено, электродвигатель обеспечивает ту же величину механической энергии, но при более высокой частоте вращения и меньшем крутящем моменте.
В электродвигателе существует воздушный зазор между ротором и статором. Электродвигатель обычно проектируется таким образом, чтобы иметь настолько малый воздушный зазор, насколько это практически осуществимо. Напряженность поля может быть ослаблена, но за счет увеличения этого воздушного зазора. Такая система была использована в электродвигателях с аксиальным магнитным потоком, в которых ротор и статор имеют по существу форму диска. Смещение между дисками может быть увеличено для уменьшения напряженности поля. В электродвигателях с радиальным магнитным потоком ротор может быть расположен центрально, тогда как статор, находящийся с наружной стороны ротора, располагается по окружности относительно ротора. Если, например, ротор смещается вдоль оси вращения, эффективная напряженность поля в электродвигателе с радиальным магнитным потоком снижается. Механизмы, которые регулируют относительные положения ротора и статора, относительно дороги и создают более громоздкий электродвигатель. В альтернативных решениях, в которых выключается участок обмоток или регулируются относительные положения ротора и статора, электронный контроллер управляет регулировкой на основе входных сигналов. Такие контроллеры могут быть дорогими.
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Согласно вариантам реализации настоящего описания изобретения напряженность поля электродвигателя изменяется регулировкой магнитного сопротивления железного сердечника по меньшей мере либо ротора, либо статора. При обеспечении железного сердечника, содержащего как тонкий неподвижный участок железного сердечника, причем в некоторых вариантах реализации он вообще отсутствует, так и подвижный участок железного сердечника, возможна регулировка напряженности поля. Когда подвижный участок железного сердечника вступает в контакт с неподвижным железным сердечником, они оба действуют как один большой железный сердечник. Когда подвижный участок железного сердечника смещается от неподвижного железного сердечника, неподвижный железный сердечник образует по существу полную протяженность железного сердечника. Почти весь магнитный поток должен проходить через этот тонкий неподвижный участок железного сердечника, так что неподвижный железный сердечник "насыщается" или его "магнитное сопротивление" возрастает, уменьшая тем самым напряженность поля.
В вариантах реализации, в которых подвижные сегменты железного сердечника использованы в роторе, и ротор располагается снаружи вокруг центрального статора, перемещение сегментов железного сердечника между первой позицией (в контакте с неподвижным железным сердечником) и второй позицией (отделенной от неподвижного железного сердечника) может производиться центробежной силой. Существует небольшая магнитная сила, заставляющая неподвижный и подвижный железные сердечники оставаться в контакте. Однако когда частота вращения электродвигателя возрастает, центробежная сила может преодолеть это слабое притяжение, заставляя подвижные сегменты железного сердечника перемещаться от неподвижного железного сердечника. В таком варианте реализации лоток или другой фиксатор может быть обеспечен для захвата подвижных сегментов железного сердечника, когда они перемещаются от неподвижного железного сердечника. Когда частота вращения ротора уменьшается, подвижные сегменты железного сердечника могут быть притянуты обратно к неподвижному железному сердечнику магнитной силой, действующей между ними. В других вариантах реализации подвижные сегменты железного сердечника притянуты к неподвижному железному сердечнику пружинами или притягивающими соединительными элементами, которые подпружинены для обеспечения смещающей силы по направлению к неподвижному железному сердечнику. В некоторых вариантах реализации подвижные сегменты железного сердечника перемещаются с разными скоростями, так что может быть обеспечено плавное изменение напряженности поля в зависимости от частоты вращения. Сегменты железного сердечника реагируют с разными скоростями в зависимости от различия их масс вследствие использования материалов с разной плотностью, диапазона толщин или размеров опорной поверхности. В вариантах реализации, в которых подвижные сегменты железного сердечника смещаются пружиной, натяжение пружины может регулироваться для обеспечения требуемой реакции. Механические, электрические, пневматические или гидравлические приводные механизмы могут быть также использованы для перемещения сегментов железного сердечника ротора.
На фиг. 2 показан электродвигатель, в котором имеются три диапазона напряженности поля. CSPR равно двум, подобно тому, как показано на фиг. 1. Таким образом, для первого диапазона напряженности поля имеются значения Nmin1 и Nmax1, которые находятся в отношении 1:2. Имеется также второй диапазон напряженности поля, обеспечивающий значения Nmin2 и Nmax2, которые также находятся в отношении 1:2. Если Nmin2 было равно Nmax1 и Nmin3 равно Nmax2, результирующее CPSR равно 8. Если может оказаться желательным, чтобы Nmin2 было немного меньше чем Nmax1, результирующее CSPR будет несколько меньше восьми.
В других вариантах реализации подвижные сегменты железного сердечника используются применительно к ротору, использующему приводной механизм для их перемещения. При пассивном управлении, которое делается возможным благодаря центробежной силе, воздействующей на подвижные сегменты железного сердечника ротора, частота вращения ротора является единственным фактором, посредством которого регулируются подвижные сегменты железного сердечника. При активном управлении приводным механизмом запрос на крутящий момент от оператора, температура электродвигателя или аккумуляторной батареи, подсоединенной к электродвигателю, состояние заряда этой батареи или другие факторы могут быть входными параметрами для электронного устройства управления, которое осуществляет управление приводным механизмом. Множество сегментов железного сердечника, как и множество приводных механизмов, могут быть использованы для обеспечения ряда шагов в изменении напряженности поля.
Еще в одном варианте реализации напряженность поля электродвигателя может ослабляться за счет воздействия на магнитное сопротивление статорного кольца. Это может осуществляться, когда имеется статорное кольцо и один или более подвижных сегментов статорного кольца. Поскольку статор не вращается, приводной механизм используется, чтобы заставить подвижные сегменты статорного кольца отделиться от неподвижного статорного кольца.
Также описывается способ работы с электродвигателем, в котором статор имеет неподвижный железный сердечник и подвижные сегменты железного сердечника. Подвижные сегменты железного сердечника перемещаются приводным механизмом между первым положением, в котором подвижные сегменты железного сердечника находятся в контакте с неподвижным железным сердечником, и вторым положением, в котором подвижные сегменты железного сердечника смещены относительно неподвижного железного сердечника. Электронное устройство управления подает команды приводному механизму на перемещение подвижных сегментов железного сердечника, основываясь на одной или более частотах вращения электродвигателя, запросе на крутящий момент, температуре электродвигателя и состоянии заряда батареи, подающей электропитание на электродвигатель. В одном варианте реализации требуемая напряженность поля определяется исходя по меньшей мере из частоты вращения электродвигателя. Электронное устройство управления (ECU) подает команду приводному механизму, соединенному с подвижными сегментами железного сердечника, чтобы обеспечить требуемую напряженность поля в системе с непрерывно изменяемой напряженностью поля, и приближенно обеспечить требуемую напряженность поля в системе, в которой напряженность поля изменяется ступенчато.
В некоторых вариантах реализации требуемая напряженность поля дополнительно основывается на режиме работы. Например, состояние заряда батареи влияет на оптимальную напряженность поля, то есть такую, которая обеспечивает хороший коэффициент полезного действия (КПД). Также регенерация или зарядка батареи требует большей напряженности поля (более высокого напряжения), чем разрядка батареи. Таким образом, такая информация, сообщаемая электронному устройству управления (ECU), используется для выбора требуемой напряженности поля, подходящей для режима работы.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
ФИГ. 1 и 2 изображают диаграммы зависимости крутящего момента и мощности, обеспечиваемых электродвигателем, от частоты вращения электродвигателя.
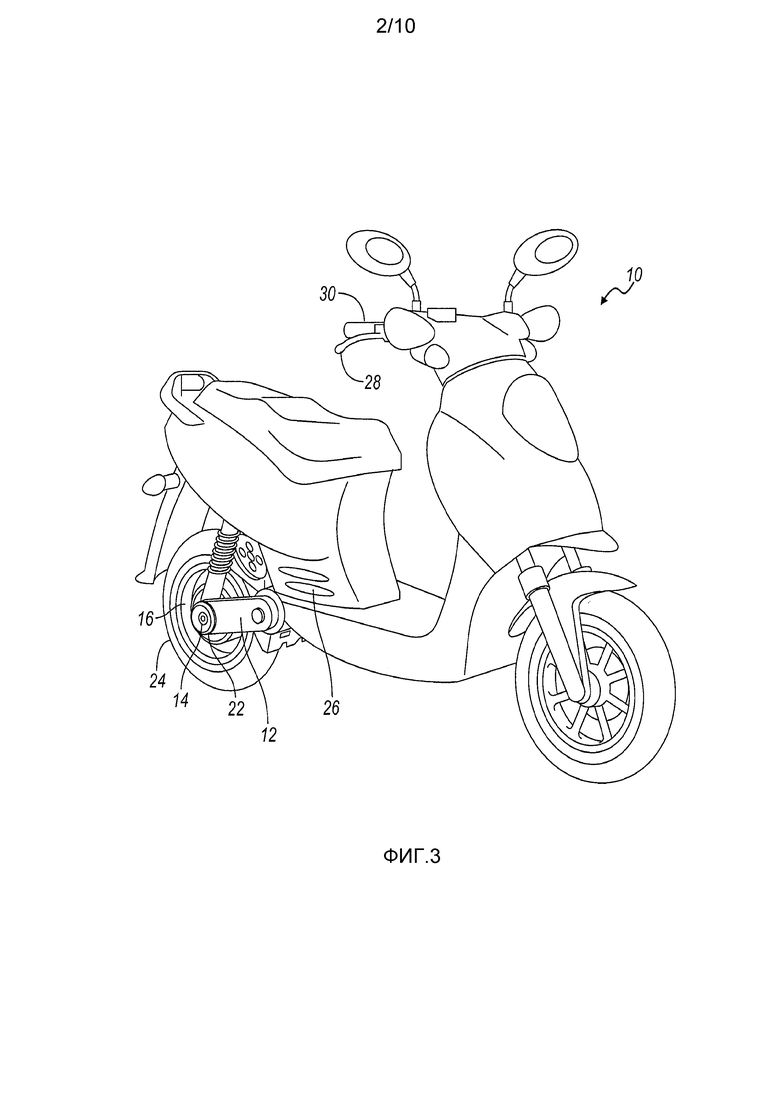
ФИГ. 3 изображает мотороллер с приводом от электродвигателя.
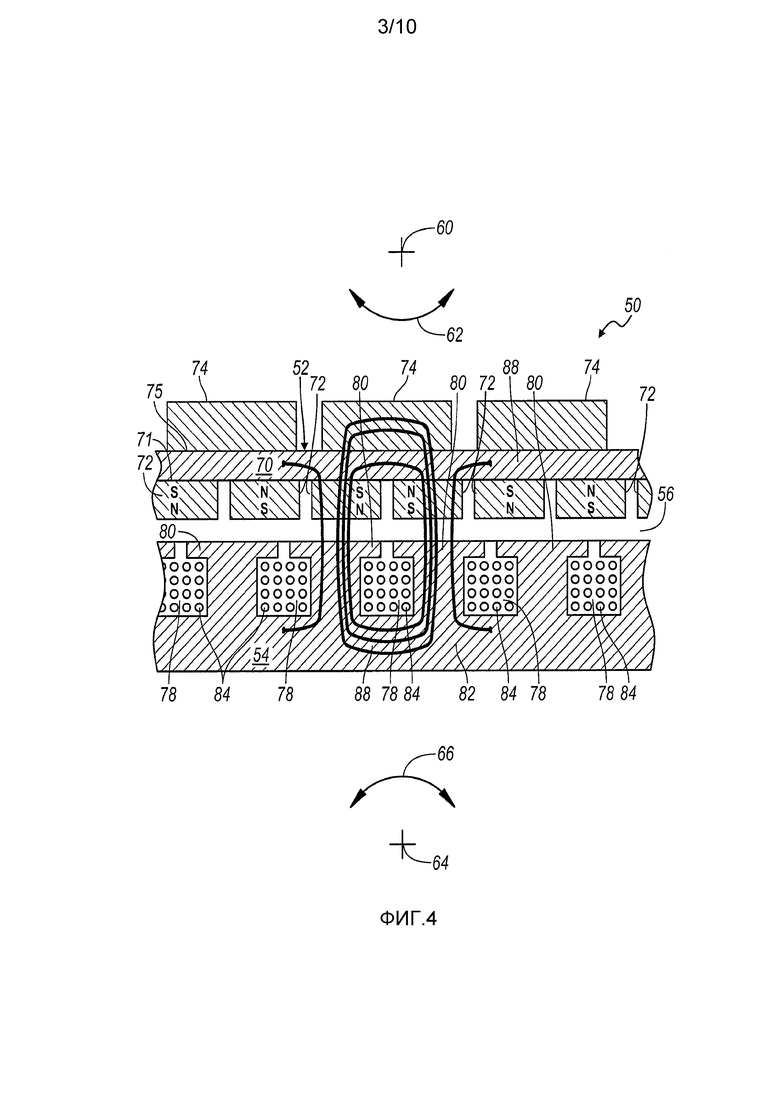
ФИГ. 4 изображает сечение участка электродвигателя.
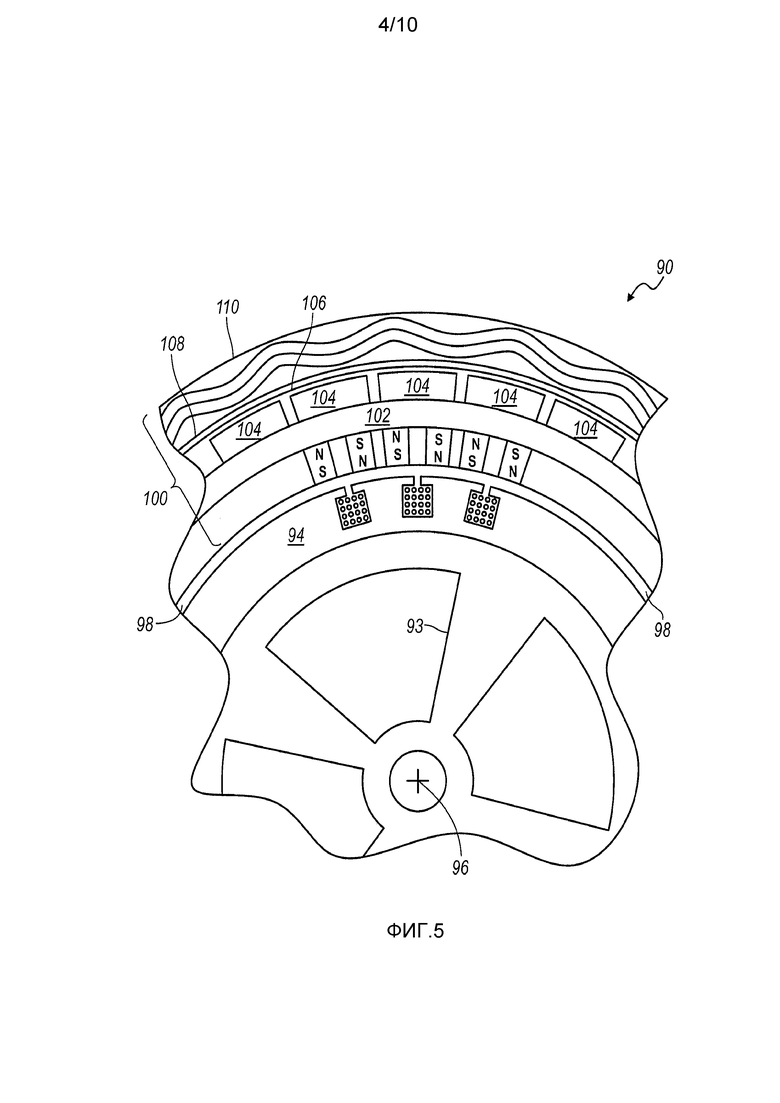
ФИГ. 5 изображает участок сечения участка электродвигателя с радиальным магнитным потоком, входящего в состав колеса.
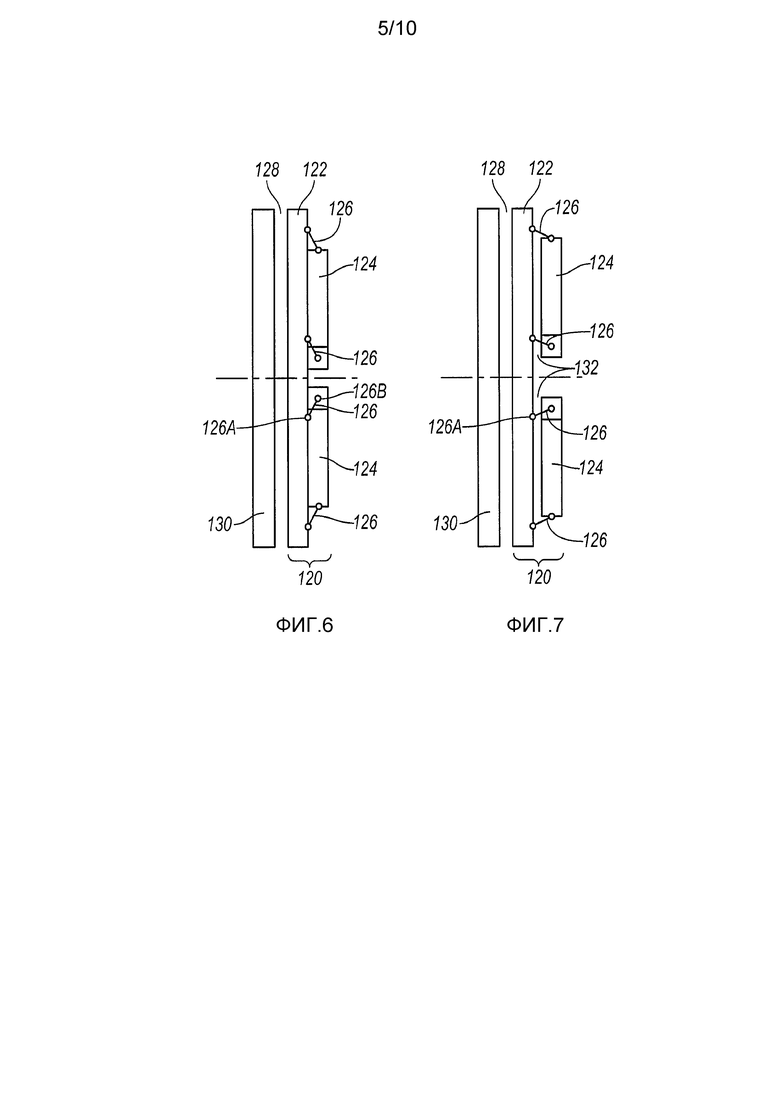
ФИГ. 6 и 7 изображают виды с торцов ротора и статора электродвигателя с аксиальным магнитным потоком при нахождении подвижных сегментов железных сердечников соответственно в контактной и неконтактной позициях.
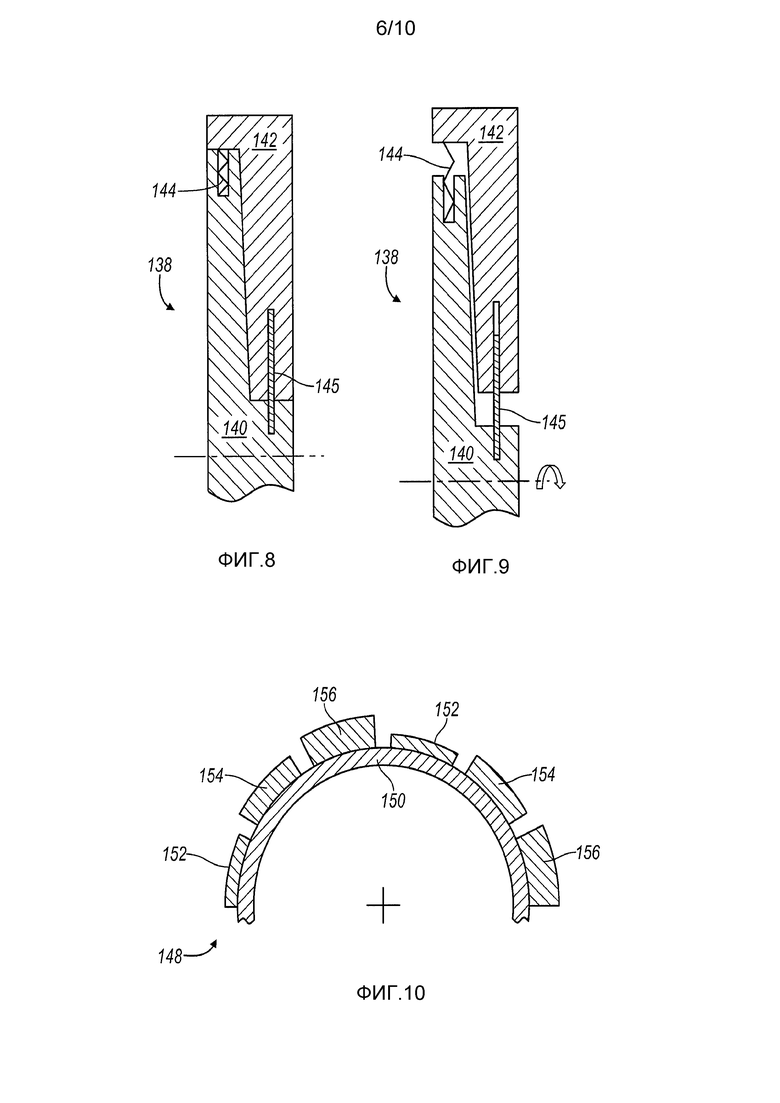
ФИГ. 8 и 9 изображают сечение ротора электродвигателя с аксиальным магнитным потоком, в котором подвижные сегменты железного сердечника притянуты к периферии ротора.
ФИГ. 10 изображает сечение ротора, имеющего подвижные сегменты железного сердечника переменной толщины.
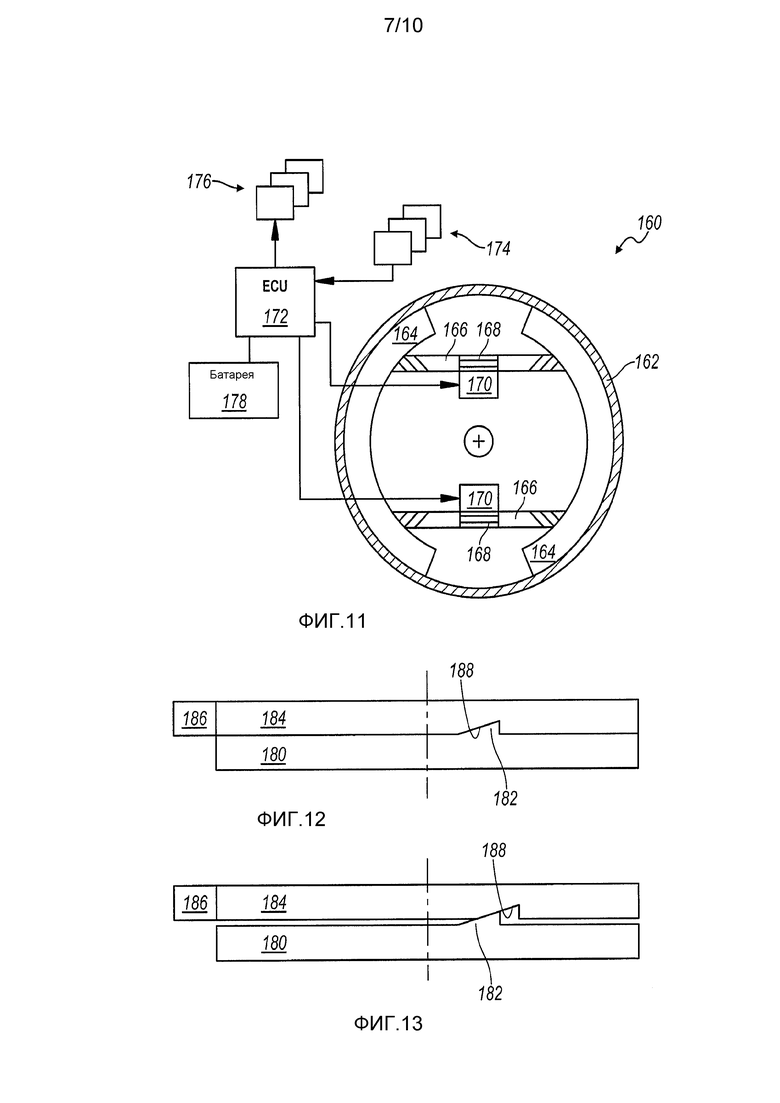
ФИГ. 11-13 изображают статоры с сегментами железного сердечника, перемещаемыми приводными системами.
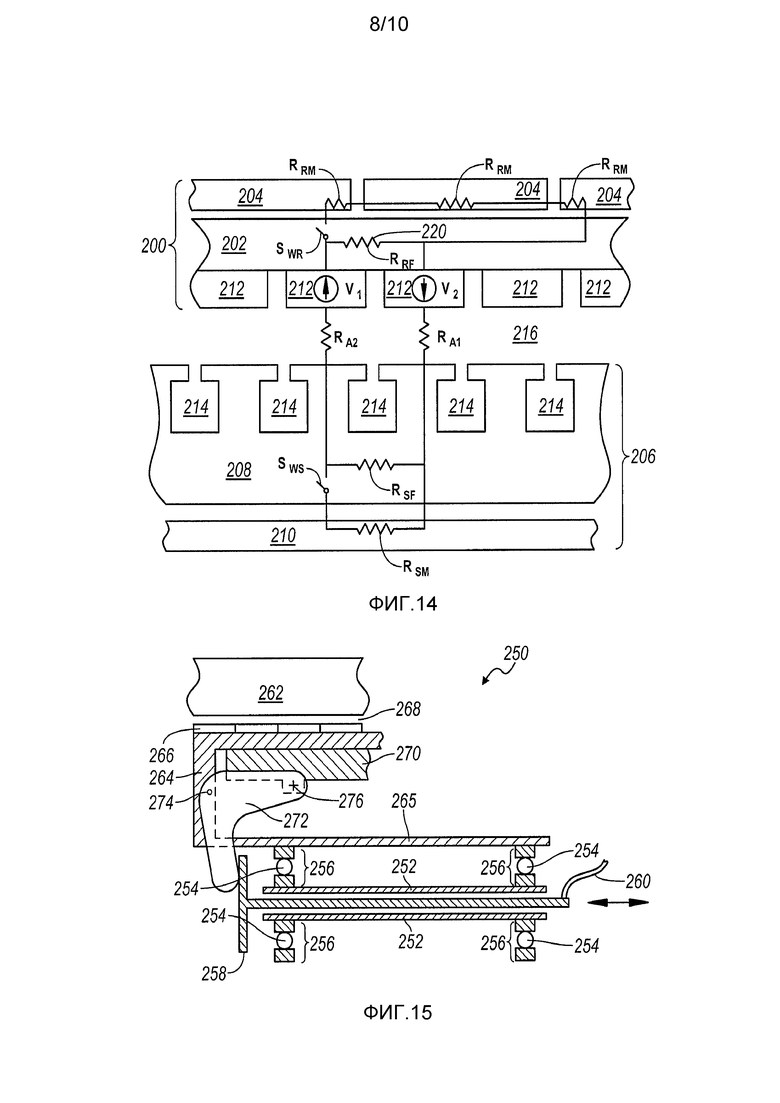
ФИГ. 14 изображает эквивалентную схему электрических соединений, которая может быть использована для анализа магнитной системы электродвигателя и на которой железный сердечник представлен резисторами, подвижный железный сердечник показан включенным параллельно с резисторами статора и ротора, и имеются переключатели, чтобы представить их в отключенном состоянии, когда они раздвигаются. Когда железный сердечник находится в контакте, переключатель замыкается, и два резистора включены параллельно, так что их общее сопротивление уменьшается.
ФИГ. 15 изображает сечение электродвигателя с внутренним ротором, имеющим подвижный сегмент железного сердечника, представляющее состояние, в котором подвижный сегмент железного сердечника находится в контакте с неподвижным сегментом железного сердечника.
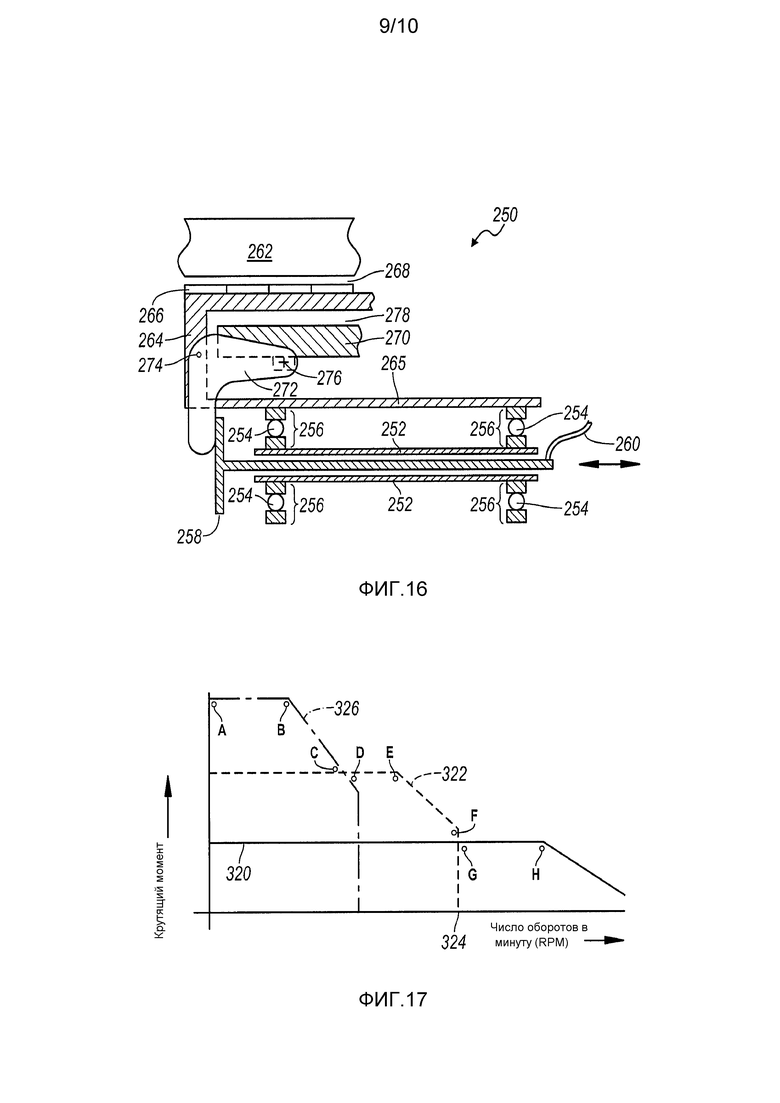
ФИГ. 16 изображает сечение электродвигателя с внутренним ротором, показанное на фиг. 15, представляющее состояние, в котором подвижный сегмент железного сердечника отделен от неподвижного сегмента железного сердечника.
ФИГ. 17 изображает диаграмму зависимости крутящего момента от числа оборотов в минуту (RPM) для трех уровней напряженности поля.
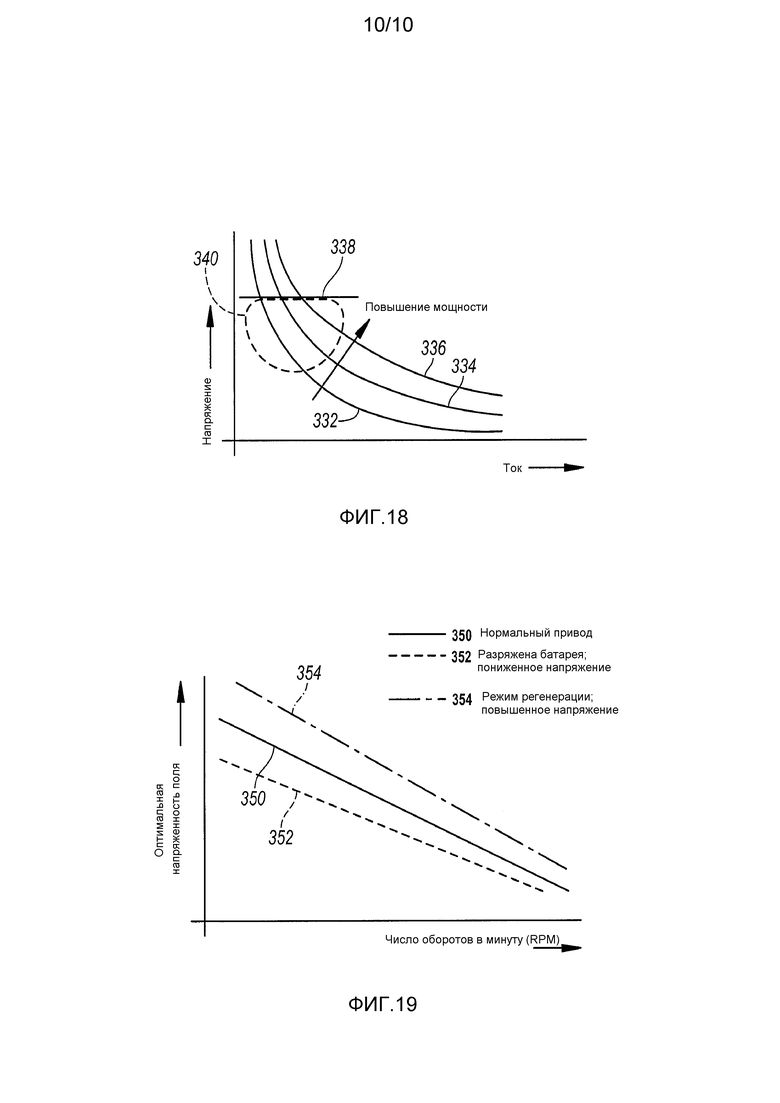
ФИГ. 18 изображает семейство кривых при постоянной мощности на диаграмме зависимости между напряжением и током.
ФИГ. 19 изображает оптимальную напряженность поля в зависимости от числа оборотов в минуту (RPM) для трех режимов работы: нормальный привод, разряженная батарея и регенерация батареи.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ВОПЛОЩЕНИЯ
Когда наилучший вариант осуществления изобретения будет описан подробно со ссылками на конкретные варианты реализации, специалистам в данной области техники будут понятны различные альтернативные решения и варианты реализации в объеме приведенной ниже формулы изобретения. Хотя различные варианты реализации могут быть описаны как обеспечивающие преимущества или являющиеся предпочтительными по отношению к одной или более желаемым характеристикам, каждый специалист в данной области техники поймет, что можно найти компромиссное решение для одной или более характеристик, чтобы получить желаемые признаки системы, которые зависят от конкретного применения и реализации. Эти признаки включают в себя, не ограничиваясь этим, стоимость, прочность, долговечность, стоимость срока службы, пригодность для продажи, вешний вид, упаковку, размер, удобство эксплуатации, массу, технологичность изготовления, легкость сборки и т.д. Варианты реализации, описанные здесь, которые характеризуются как менее желательные, чем другие варианты реализации или варианты реализации предыдущего уровня техники по отношению к одной или более характеристикам, не выпадают из объема описания изобретения и могут быть желательными для конкретных применений. Согласно требованиям здесь дается подробное описание вариантов реализации настоящего изобретения; однако должно быть понятно, что описываемые варианты реализации являются просто примерами изобретения, которые могут быть реализованы в различных и альтернативных формах. Чертежи необязательно выполнены в масштабе; некоторые элементы могут быть чрезмерно увеличены или сведены к минимуму, чтобы показать подробно конкретные компоненты. Поэтому конкретные структурные и функциональные подробности, описываемые здесь, не должны рассматриваться как ограничивающие, а просто служить презентационной основой для ознакомления специалистов в данной области техники с различным применением настоящего изобретения.
Как будет понятно специалистам в данной области техники, различные признаки вариантов реализации, показанные и описанные со ссылкой на любой один из чертежей, могут быть объединены с признаками, показанными на одном или более других чертежей, чтобы объединить альтернативные варианты реализации, которые не были четко показаны или описаны. Сочетание показанных признаков обеспечивает презентационные варианты для типовых применений. Однако различные сочетания и модификации признаков, совместимые с идеями настоящего описания изобретения, могут быть желательными для конкретных применений или реализаций. Специалисты в данной области техники могут осознать, были ли четко описаны или показаны подобные применения и реализации.
Мотороллер 10 показан на фиг. 3. Мотороллер 10 имеет раму 12, к которой связана ось 14. Ось 14 связана через центр колеса 16, и колесо 16 вращается с осью 14. Колесо 16 имеет обод 22, на котором монтируется шина 24. Как показано более подробно на фиг. 5, статор может быть подсоединен к оси 14, а ротор может быть подсоединен к ободу 22. Статор и ротор являются элементами электродвигателя, получающего электропитание от встроенной батареи (не показана отдельно), находящейся под кожухом 26. Мотороллер 10 имеет органы 28 и 30 управления оператора, посредством которых оператор подает команду на включение мощности и/или на торможение. Органы 28 и 30 управления оператора могут быть подсоединены электронным образом к электронному устройству управления (не показано на фиг. 3).
Электродвигатель может иметь форму с цилиндрическим ротором, окруженным цилиндрическим покрывающим статором, обычно называемую электродвигателем с внутренним ротором. Ротор и статор разделены небольшим воздушным зазором. Электродвигатель с внутренним ротором может быть также электродвигателем с радиальным магнитным потоком, поскольку магнитный поток проходит в радиальном направлении через воздушный зазор между ротором и статором. Другой формой электродвигателя является электродвигатель с внешним ротором и радиальным магнитным потоком, который имеет неподвижный внутренний статор, окруженный цилиндрическим покрывающим ротором. Еще один тип электродвигателя может иметь ротор и статор в форме дисков, и он называется электродвигателем с аксиальным магнитным потоком, поскольку этот поток проходит в аксиальном направлении между ротором и статором.
Хотя обсуждаются электродвигатели с аксиальным магнитным потоком и радиальным магнитным потоком, настоящее описание изобретения относится к электрическим машинам, включающим в себя: специализированные электродвигатели, специализированные генераторы и те, которые переключаются между работой в качестве двигателя и в качестве генератора. Настоящее описание изобретения применимо ко всем таким электрическим машинам. На фиг. 3 показан мотороллер с электродвигателем. Однако настоящее описание изобретения относится ко всем автотранспортным средствам: автомобилям, электрическим велосипедам и т.п. и, еще более широко, ко всем электрическим машинам с постоянными магнитами.
Сечение электродвигателя 50 согласно варианту реализации настоящего описания изобретения подробно показано на фиг. 4. Электродвигатель 50 имеет ротор 52 и статор 54, разделенные воздушным зазором 56. Для удобства иллюстрации ротор 52 и статор 54 показаны как линейные элементы. Однако обычно ротор 52 вращается относительно статора 54. В одной конфигурации ось, относительно которой вращается ротор, обозначена позицией 60, и ротор 52 и статор 54 закруглены в направлении стрелок 62. В альтернативной конфигурации, известной как конфигурация с внешним ротором, или иногда называемой конфигурацией с вывернутым наружу ротором, ось, относительно которой вращается ротор, обозначена позицией 64, а ротор и статор закруглены в направлении стрелок 66.
Продолжая ссылаться на фиг. 4, ротор 52 имеет неподвижный железный сердечник 70 и множество постоянных магнитов 72, прикрепленных к поверхности 71 неподвижного железного сердечника 70, которая проксимальна к статору 54. Соседние постоянные магниты 72 имеют противоположную полярность, то есть северный полюс магнита проксимален к южному полюсу соседних магнитов. Ротор 52 также имеет множество подвижных сегментов 74 железного сердечника, расположенных вблизи задней поверхности 75 неподвижного железного сердечника 70, дистальной от статора 54. Как будет более подробно описано ниже, подвижные сегменты 74 железного сердечника могут быть подвижно прикреплены к неподвижному железному сердечнику 70. В другом варианте реализации электродвигатель 50 имеет относительно тонкий неподвижный железный сердечник 72 или вообще не имеет неподвижного железного сердечника, и в этом случае подвижные сегменты 74 железного сердечника располагаются вблизи от постоянных магнитов 72 или немагнитной опорной структуры.
Как дополнительно показано на фиг. 4, статор 54 имеет множество прорезей или каналов 78. Эти прорези или каналы 78 шире на дистальном конце 79, когда прорези 78 проходят, удаляясь от воздушного зазора 56, и прорези 78 сужаются проксимально к воздушному зазору 56. Т-образные выступы 80 образованы между прорезями 78. Много витков провода 84 намотано вокруг Т-образных выступов 80, так что провод 84 проходит наружу из железного сердечника 82 статора через прорези 78. Многочисленные витки обмоток из провода 84 показаны в сечении внутри прорезей 78. На фиг. 4 показаны также линии 88 магнитного потока.
На фиг. 5 электродвигатель, соответствующий изображенному на фиг. 4, показан введенным в состав колеса 90. Ступица 92 имеет спицы 93, поддерживающие статор 94, и вращается вокруг оси или полуоси 96. Воздушный зазор 98 отделяет статор 94 от ротора 100. Ротор 100 имеет неподвижный железный сердечник 102, а также подвижные сегменты 104 железного сердечника. Подвижные сегменты 104 железного сердечника показаны в первом положении, в котором они удерживаются на неподвижном магнитном сердечнике 102 магнитным притяжением, в одном варианте реализации. Альтернативно подвижные сегменты 104 железного сердечника смещаются в направлении неподвижного железного сердечника 102 подпружиненным прижимным элементом или пружиной. Когда ротор 100 вращается, подвижные сегменты 104 железного сердечника отделяются или отодвигаются от неподвижного железного сердечника 102, когда центробежная сила преодолевает силу магнита или пружины. Лоток 106 обеспечен для вмещения подвижных сегментов 104 железного сердечника, когда они отделяются от неподвижного железного сердечника 102. Внешняя поверхность лотка 108 образует обод для монтажа шины 110.
На фиг. 6 и 7 показан ротор 120 в конфигурации электродвигателя с аксиальным магнитным потоком. Как следует из фиг. 6 и 7, ротор имеет неподвижный железный сердечник 122 и подвижные сегменты 124 железного сердечника, подсоединенные к неподвижному железному сердечнику 122 установочным устройством размещения подвижных сегментов 124 железного сердечника от смещения относительно неподвижного железного сердечника 122, превышающего заданное максимальное расстояние. Устройство размещения может включать в себя по меньшей мере один прижимной элемент 126. В одном варианте реализации прижимной элемент 126 может быть смещенным или подпружиненным. В других альтернативах подвижные элементы 124 железного сердечника могут притягиваться несмещенными прижимными элементами 126 с тем, чтобы подвижные сегменты 124 железного сердечника могли перемещаться радиально наружу по отношению к сегментам 122 железного сердечника центробежной силой. Прижимные элементы 126 препятствуют перемещению наружу подвижных сегментов 124 более чем на малое расстояние.
Как показано на фиг. 6 и 7, прижимные элементы 126 подсоединены к подвижным сегментам 124 железного сердечника в точках 126а соединения и подсоединены к неподвижному железному сердечнику 122 в точках 126b соединения. Вид сбоку ротора 120, отделенного воздушным зазором 128 от статора 130, показан на фиг. 7. Подвижные сегменты 124 железного сердечника находятся в контакте с неподвижным железным сердечником 122 на фиг. 7. Однако на фиг. 8 ротор 120 вращается, так что подвижные сегменты 124 железного сердечника отодвигаются от железного сердечника 122 центробежной силой, в результате чего между ними образуется воздушный зазор. Статор 130 включает в себя обмотки из провода, которые не показаны на фиг. 6 и 7.
На фиг. 8 показано сечение ротора 138 для электродвигателя с аксиальным магнитным потоком, имеющего неподвижный железный сердечник 140 и подвижные сегменты 142 железного сердечника, соединенные вместе устройством размещения, включающим в себя пружину 144 и направляющий штырь 145. Пружина 144 может отодвигать подвижные сегменты 142 железного сердечника от неподвижного железного сердечника 140 или может также создавать смещающую силу, чтобы возвращать обратно подвижные сегменты 142 железного сердечника по направлению к неподвижному железному сердечнику 140. На фиг. 8 показано состояние, когда ротор 138 неподвижен или вращается с частотой вращения, при которой центробежная сила, действующая на подвижный сегмент 142 железного сердечника, меньше натяжения пружины, действующего на сегмент 142 железного сердечника.
На фиг. 9 показан ротор 138, вращающийся с частотой вращения, превышающей пороговое значение, так что сегмент 142 железного сердечника удаляется радиально от неподвижного железного сердечника 140 под действием центробежной силы. Неподвижный железный сердечник 140 и подвижный сегмент 142 железного сердечника слегка наклонены с тем, чтобы, когда подвижный сегмент 142 железного сердечника движется радиально наружу, создавался небольшой осевой зазор межу неподвижным железным сердечником 140 и подвижным сегментом 142 железного сердечника. Так что при образовании зазора направляющий штырь 145, подсоединенный к неподвижному железному сердечнику 140, скользит во втулке внутри подвижного сегмента 142 железного сердечника.
На фиг. 10 показан участок ротора 148 в машине с радиальным магнитным потоком и внешним ротором, имеющий неподвижный железный сердечник 150 и группу подвижных сегментов 152, 154 и 156 железного сердечника. Три группы подвижных сегментов 152, 154 и 156 железного сердечника могут иметь разные толщины или массы, так что одна группа подвижных сегментов железного сердечника отодвигается от неподвижного железного сердечника 150 при меньшей частоте вращения, чем другие подвижные сегменты железного сердечника. При ступенчатом изменении магнитного сопротивления железного сердечника магнитное поле изменяется более плавно, а частота вращения проходит через ряд изменений. В других альтернативах разные группы подвижных сегментов железного сердечника выполняются из материалов с разной плотностью, так что подвижные сегменты железного сердечника имеют разные массы. В другой альтернативе сегменты железного сердечника притягиваются либо подпружиненными прижимными элементами, либо пружинами. Натяжение пружин в разных группах разное, чтобы обеспечить требуемую реакцию, то есть отделение групп в разных диапазонах частот вращения.
Выше описаны альтернативы для изменения магнитного сопротивления железного сердечника ротора, в которых подвижные сегменты железного сердечника находятся под действием центробежной силы, и при этом их перемещение основано на частоте вращения ротора. Альтернативно магнитное сопротивление статорного кольца может регулироваться, чтобы воздействовать на напряженность поля. Однако вследствие того, что статор не вращается, центробежная сила не действует на подвижные сегменты статора, и поэтому используется приводной механизм, чтобы обеспечить перемещение сегментов статора.
На фиг. 11 показан статор 160 в машине с радиальным магнитным потоком и внешним ротором, имеющий неподвижное статорное кольцо 162. Подвижные сегменты 164 статора показаны в контакте с неподвижным статорным кольцом 162. Штыри 166 снабжены резьбой 165. Левосторонняя резьба 165 обеспечена на одном конце, правосторонняя резьба 165 обеспечена на противоположном конце, и имеются зубья 168 шестерни, которые могут вводиться в зацепление небольшими электродвигателями 170, такими как шаговые электродвигатели. При повороте штырей 166 в одном направлении подвижные сегменты 164 статора отделяются от неподвижного статорного кольца 162. При повороте штырей 166 в другом направлении подвижные сегменты 164 статора возвращаются в положение, показанное на фиг. 11, в котором они находятся в контакте с неподвижным статорным кольцом 162. Обмотки из провода в статоре 160 и ротор с постоянными магнитами, окружающий статор 160, не показаны на фиг. 11.
Электронное устройство управления (ECU) 172 управляет работой электродвигателей 170. ECU 172 принимает входные сигналы от разных датчиков, которые обеспечивают сигналы, по которым можно определить один или более параметров из частоты вращения электродвигателя, тока, текущего через обмотки электродвигателя, напряжения на электродвигателе, частоты вращения, требуемой оператором автотранспортного средства, крутящего момента, требуемого оператором, тормозной силы, требуемой оператором, температур системы, состояния заряда батареи 178, географического положения, и т.д. ECU 172 может также управлять различными функциями, то есть обеспечивать выходные сигналы 176 управления на основе входных сигналов 174.
На фиг. 12 показан на виде с торца статор машины с аксиальным магнитным потоком, имеющий неподвижное статорное кольцо 180 с небольшим скошенным выступом 182. Неподвижное статорное кольцо 180 имеет форму диска. В контакте с неподвижным статорным кольцом 180 находится подвижное статорное кольцо 184, которое подсоединено к шаговому электродвигателю 186 или другому приводному механизму. В подвижном статорном кольце 184 имеется скошенное углубление 188, которое стыкуется со скошенным выступом 182. Когда подвижное статорное кольцо 184 вращается в направлении, обозначенном стрелкой, под действием электродвигателя 186, подвижное статорное кольцо 184 принуждается отделяться от неподвижного статорного кольца 180 скошенным выступом 188, наезжающим на скошенное углубление 182. Ряд таких выступов обеспечен на периферии, чтобы правильно поддерживать подвижное статорное кольцо.
Магнитная система может быть представлена и проанализирована через упрощенную модель эквивалентной схемы электрических соединений, показанную на фиг. 14, в которой ротор 200 имеет неподвижный железный сердечник 202 и подвижные сегменты 204 железного сердечника, а магнитное сопротивление представляется активным сопротивлением. Статор 206 имеет неподвижный железный сердечник или кольцо 208 и подвижный сегмент железного сердечника или кольцо 210. Электродвигатель может не иметь подвижных сегментов 204 и 210 железного сердечника, однако оба они включены в его состав на фиг. 14 в целях представления модели. Постоянные магниты 212 расположены на поверхности неподвижного железного сердечника 202. Статор 206 имеет ряд прорезей или каналов 214, в которых укладываются обмотки. Воздушный зазор 216 поддерживается между ротором 200 и статором 206. Неподвижный железный сердечник 202 моделируется как резистор 220 с сопротивлением RRF. Когда подвижные сегменты 204 железного сердечника не находятся в контакте с неподвижным железным сердечником 202, они вносят пренебрежимо малый вклад в поток тока. Однако когда элементы 202 и 204 находятся в контакте, резистор 220 имеет сопротивление неподвижного железного сердечника, включенное параллельно с сопротивлением подвижного железного сердечника, что уменьшает общее сопротивление. Подобным образом статор 206 моделируется как резистор с сопротивлением RSf, когда неподвижное статорное кольцо 208 и подвижное статорное кольцо 210 отделены друг от друга. Соседние магниты 212 являются источниками напряжения, V1 и V2. Воздушный зазор 216 моделируется как резисторы с сопротивлениями RA1 и RA2. Подвижные сегменты 204 железного сердечника могут моделироваться как резисторы с сопротивлением RRm, которые включены параллельно резистору RRf неподвижного железного сердечника. Однако, как показано на фиг. 14, подвижные сегменты 204 железного сердечника не находятся в контакте с неподвижным железным сердечником 202. Для моделирования такого состояния на фиг. 14 показан разомкнутый переключатель SWR. Когда подвижные сегменты 204 железного сердечника находятся в контакте с неподвижным железным сердечником 202, переключатель SWR замыкается. Аналогично подвижная спинка 210 статора моделируется как резистор RSm, включенный параллельно с резистором RSF, моделирующим неподвижное статорное кольцо 208. Однако, как показано, подвижное статорное кольцо 210 не находится в контакте с неподвижным статорным кольцом 208, и поэтому переключатель SWS изображен на фиг. 14 разомкнутым.
В примерах, представленных на чертежах, постоянные магниты показаны прикрепленными к ротору. Однако в некоторых применениях постоянные магниты отлиты в отверстия в роторе, например, из порошковых материалов, чтобы тем самым зафиксировать магниты и предохранить их от расцепления с ротором и изменения магнитных свойств магнита и ротора в сборе. Настоящее описание изобретения относится также и к таким конфигурациям ротора с внутренними постоянными магнитами.
На фиг. 15 сечение участка электродвигателя 250 с внутренним ротором и радиальным магнитным потоком представляет вариант реализации, в котором приводится в действие подвижный сегмент железного сердечника. Ось 252 поддерживается в шарикоподшипниках 254 в подшипниковой опоре 256. Приводной шток 258, имеющий фланцевый участок на одном конце, устанавливается внутри оси 252. На фиг. 15 трос 260 подсоединен к приводному штоку 258. Приложение к тросу 260 или снятие с него усилия натяжения заставляет шток 258 перемещаться по отношению к оси 252. Электродвигатель 250 имеет статор с обмотками 262. Ротор включает в себя неподвижный железный сердечник 264, на котором закреплены магниты 266. Неподвижный железный сердечник 264 подсоединен к держателю 265 ротора, который вращается на подшипниковой опоре 256. Имеются подвижные сегменты 270 железного сердечника, и только один такой подвижный сегмент 270 железного сердечника показан на фиг. 15. Угловой рычаг 272 подсоединен к неподвижному железному сердечнику 264 через шарнир 274 и прикреплен к подвижному сегменту 270 железного сердечника через шарнир 276. Угловой рычаг 272 контактирует с фланцевым концом приводного штока 258. На фиг. 15 подвижный сегмент 270 железного сердечника упирается в неподвижный железный сердечник 264.
Обратимся теперь к фиг. 16, где шток смещен влево по отношению к оси 252. В связи с тем, что фланцевый конец приводного штока 258 перемещается влево, угловой рычаг 272 поворачивается в направлении по часовой стрелке вокруг шарнира 274, оттягивая тем самым подвижный сегмент 270 железного сердечника по направлению вниз. Теперь существует воздушный зазор 278 между неподвижным железным сердечником 264 и подвижным сегментом 270 железного сердечника. Воздушный зазор 278 ослабляет напряженность поля. При нахождении подвижных сегментов 306 железного сердечника в положении с воздушным зазором 308 может быть обеспечен один угловой рычаг 272, чтобы приводить в действие каждый подвижный сегмент 270 железного сердечника. Угловые сегменты 272 могут подсоединяться к оси.
Обсуждение электродвигателя с внутренним ротором со ссылками на фиг. 15-16 направлено на один пример электродвигателя, в котором подвижные сегменты железного сердечника могут приводиться в действие под внешним управлением. В представленном примере показан трос. Однако альтернативно могут быть использованы электрический привод через линейный приводной механизм, гидравлический привод или же множество других приводных схем. Приводной механизм может работать под управлением оператора или управляться от электронного устройства управления. Например, электронное устройство управления может принимать сигналы, касающиеся параметров транспортного средства и электродвигателя, и подавать команды подвижным сегментам железного сердечника на соответствующее перемещение. Кроме того, конкретная механическая конфигурация, имеющая угловой рычаг, который перемещается посредством приводного штока, не претендует на то, чтобы быть ограничивающей. Вместо нее могут использоваться многие другие подходящие конфигурации.
На фиг. 17 представлена диаграмма зависимости крутящего момента от числа оборотов в минуту (RPM) электродвигателя в соответствии с вариантом реализации описания изобретения. Сплошная кривая 320 представляет ситуацию для электродвигателя с фиксированной напряженностью поля, в котором желателен большой диапазон частот вращения. Однако имеются две проблемы в таком режиме работы. Максимальный крутящий момент ограничен. Более того, работа не настолько эффективна, как желательно, в диапазоне частот вращения. Кривая 322 представляет ситуацию, в которой напряженность поля увеличена. Максимальный крутящий момент стал больше, но частота вращения ограничивается величиной, обозначенной позицией 324. Электродвигатель даже с большей напряженностью поля имеет характеристики кривой 326 с более высоким крутящим моментом при меньших частотах вращения электродвигателя, но в очень ограниченном диапазоне частот вращения. Ограничение частоты вращения является следствием чрезмерного возрастания пртиво-ЭДС в электродвигателе. При обеспечении трех диапазонов напряженности поля резко улучшается динамический диапазон электродвигателя при хорошем КПД. Таким образом, если требуется увеличить частоту вращения электродвигателя в точке А запуска, в которой частота вращения электродвигателя низкая, а требуемый крутящий момент высокий, высокая напряженность поля может способствовать достижению точки В, которая также обеспечивает высокий крутящий момент. За точкой В крутящий момент должен падать, но мощность остается постоянной, то есть на участке от В до С. Однако очень малое дальнейшее повышение частоты вращения электродвигателя возможно, если напряженность поля не ослабевает, как показано кривой 322. Делая это, становятся достижимыми точки D, E и F, причем на участке от D до E обеспечивается постоянный крутящий момент/возрастающая мощность, а на участке между точками Е и F обеспечивается постоянная мощность/уменьшающийся крутящий момент. Подобным образом дальнейшее уменьшение напряженности поля позволяет достичь точек G и H. За счет обеспечения трех уровней напряженности поля может быть получен высокий крутящий момент при малой частоте вращения вместе с широким диапазоном скоростей вращения и близким к пиковому значению коэффициенте полезного действия во всем диапазоне частот вращения.
Желательно обеспечить работу электродвигателя в точке минимального тока/высокого напряжения для генерации требуемой мощности, поскольку резистивные потери пропорциональны квадрату тока, и поэтому такие потери становятся минимальными при малом токе. Вследствие этого КПД электродвигателя повышается, а нежелательный нагрев электродвигателя снижается. Дополнительное преимущество заключается в том, что силовая электроника, связанная с электродвигателем, не понижает также и напряжение батареи, так что электронные устройства могут быть более простыми и более эффективными. Выбирая величину напряженности поля в требуемом диапазоне, можно построить семейство кривых для диапазона мощностей и частот вращения, как показано на фиг. 18. Таким образом, для того чтобы обеспечить эффективную работу электродвигателя при конкретной частоте вращения и мощности, напряженность поля изменяется согласно соотношению, показанному на фиг. 18, то есть в зависимости от частоты вращения электродвигателя.
Обратимся теперь к фиг. 18, где графически иллюстрируется стратегия управления. На фиг. 18 показан график зависимости напряжения от тока для диапазона уровней мощности. Кривая 332 может представлять, например, уровень 25 Вт; кривая 334 представляет уровень 50 Вт; и кривая 336 может представлять уровень 100 Вт. Напряжение ограничивается таким образом, что работа свыше линии 338 невозможна. Например, если батарея, подключенная к электродвигателю, является батареей с напряжением 12 В, предельное значение, определяемое линией 338, равно 12 В. Более эффективно работать при наименьших возможных токах. Таким образом, требуемый рабочий диапазон показан как область 340 высокого КПД на фиг. 18. Когда частота вращения электродвигателя изменяется, система управления действует так, чтобы изменить напряженность поля с целью удержания режима работы в области 340 высокого КПД.
На фиг. 19 показана оптимальная напряженность поля в зависимости от частоты вращения электродвигателя для нормального режима работы, например, при 72 В это кривая 350. Когда батарея разряжается, напряжение батареи падает, и падает оптимальная напряженность поля, как показано кривой 352. В режиме регенерации батареи, например, во время рекуперативного торможения в электрическом транспортном средстве, напряжение выше, чем напряжение батареи, и оптимальная напряженность поля становиться выше, как показано кривой 354. В вариантах реализации, в которых напряженность поля непрерывно изменяется, напряженность поля выбирается на основе как числа оборотов в минуту (RPM) электродвигателя, так и режима работы - нормального, с разряженной батареей, регенерации батареи и т.п. В вариантах реализации, в которых напряженность поля изменяется ступенчато, шаг напряженности поля выбирается так, чтобы быть по возможности близким к оптимальной напряженности поля в зависимости от числа оборотов в минуту (RPM) электродвигателя и режима работы.
При поддержании напряженности поля в пределах диапазона, обозначенного как требуемый, потери минимизируются. Это может сопровождаться непрерывным изменением напряженности поля, например, непрерывно действующим приводным механизмом, отодвигающим один или более подвижных сегментов железного сердечника от неподвижного железного сердечника, или ступенчатым изменением посредством приведения в действие стольких сегментов, сколько указано, для обеспечения требуемой напряженности поля, то есть такой, которая позволяет току иметь или приближаться к минимальному значению. Приведенное выше описание применимо также к электрической машине, работающей в качестве генератора.
Тогда как выше были описаны различные варианты реализации, это не означает, что эти варианты реализации представляют все возможные формы изобретения. Напротив, формулировки, используемые в спецификации, являются формулировками описания, а не ограничения, и понятно, что различные изменения могут быть сделаны без отклонения от сущности и объема изобретения. Кроме того, признаки различного осуществления вариантов реализации могут сочетаться для образования дополнительных вариантов реализации изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УНИПОЛЯРНЫЙ МОТОР-ГЕНЕРАТОР | 2012 |
|
RU2586111C2 |
| ЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 1994 |
|
RU2094932C1 |
| Гибридный электрический двигатель с самовыравнивающимся ротором с постоянными магнитами и короткозамкнутым ротором | 2015 |
|
RU2669206C2 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2000 |
|
RU2234788C2 |
| ВЫСОКОПРОИЗВОДИТЕЛЬНАЯ МЕЛЬНИЦА | 2011 |
|
RU2568432C2 |
| ПРЯМОПРИВОДНОЙ ГЕНЕРАТОР ИЛИ ДВИГАТЕЛЬ ДЛЯ ВЕТРО- ИЛИ ГИДРОЭНЕРГЕТИЧЕСКОЙ УСТАНОВКИ ИЛИ СУДНА И СПОСОБ СБОРКИ ТАКОЙ УСТАНОВКИ | 2006 |
|
RU2438041C2 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2018 |
|
RU2716489C2 |
| НАСОС ВСПОМОГАТЕЛЬНОГО КРОВООБРАЩЕНИЯ С ТОРЦЕВЫМ ДВИГАТЕЛЕМ | 2020 |
|
RU2744482C1 |
| Тихоходный вентильный двигатель индукторного типа со встроенным магнитным редуктором | 2021 |
|
RU2787007C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2005 |
|
RU2302692C9 |
Изобретение относится к области электротехники и может быть использовано в электрических приводах транспортных средств. Техническим результатом является обеспечение высокого отношения частот вращения при постоянной мощности. В электродвигателе с постоянными магнитами с ослаблением поля ротор имеет неподвижный железный сердечник и подвижные сегменты железного сердечника. Когда подвижные сегменты железного сердечника находятся в первом положении, таком как в контакте с неподвижным железным сердечником, напряженность поля высокая. Когда подвижные сегменты железного сердечника находятся во втором положении, в котором подвижные сегменты железного сердечника отодвинуты от неподвижного железного сердечника, напряженность поля низкая. В результате имеется возможность использования электродвигателя для применений, в которых желателен широкий диапазон скоростей вращения. Изобретение применимо как к электродвигателям с постоянными магнитами, так и к генераторам. Кроме того, статорное кольцо снабжено неподвижным участком и по меньшей мере одним подвижным сегментом статора. 3 н. и 17 з.п. ф-лы, 19 ил.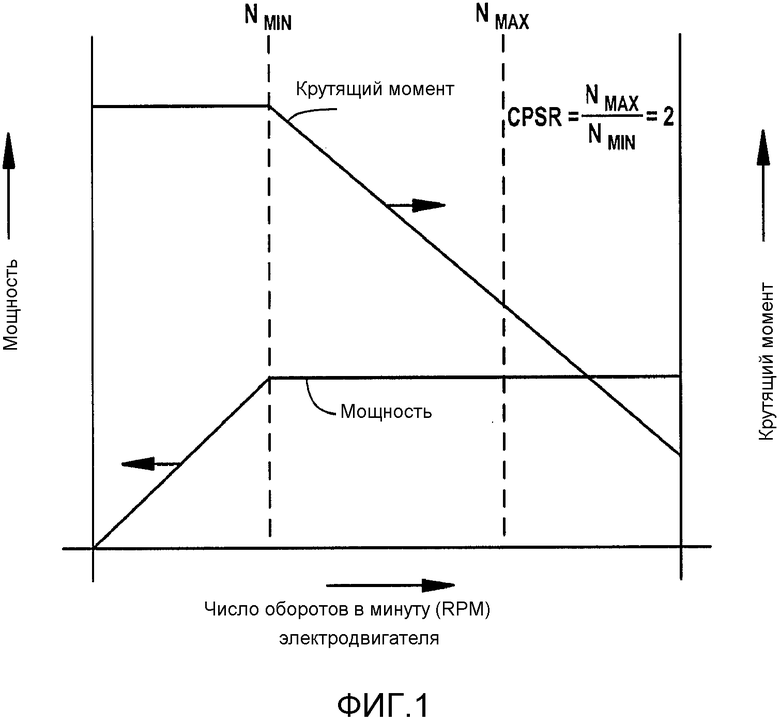
1. Электрическая машина, содержащая:
статор, имеющий множество обмоток; и
ротор с постоянными магнитами, отделенный от статора воздушным зазором, причем ротор имеет множество подвижных сегментов железного сердечника, способных перемещаться между первым положением и вторым положением, в котором подвижные сегменты железного сердечника перемещены от магнитов на расстояние, большее, чем в первом положении,
при этом магнитное поле электрической машины ослаблено, когда подвижные сегменты железного сердечника находятся во втором положении.
2. Электрическая машина по п. 1, в которой в первом положении подвижные сегменты железного сердечника находятся в контакте по меньшей мере с одним из постоянных магнитов или с неподвижным железным сердечником ротора.
3. Электрическая машина по п. 1, в которой в первом положении подвижные сегменты железного сердечника находятся в контакте с поверхностью ротора, являющейся дистальной от статора, и магниты прикреплены к поверхности ротора, проксимальной к статору.
4. Электрическая машина по п. 1, в которой первая группа подвижных сегментов железного сердечника имеет первую массу, а вторая группа подвижных сегментов железного сердечника имеет вторую массу, при этом вторая масса отличается от первой массы.
5. Электрическая машина по п. 1, причем электрическая машина является электрической машиной с внешним ротором, в которой статор расположен по центру, а ротор расположен по окружности с наружной стороны статора.
6. Электрическая машина по п. 1, причем электрическая машина является электрической машиной с внутренним ротором, в которой ротор расположен по центру, а статор расположен по окружности с наружной стороны ротора.
7. Электрическая машина по п. 1, дополнительно содержащая:
приводной механизм, подсоединенный по меньшей мере к одному из подвижных сегментов железного сердечника, причем этот приводной механизм выполнен с возможностью перемещения по меньшей мере одного из подвижных сегментов железного сердечника между первым и вторым положениями.
8. Электрическая машина по п. 1, в которой подвижные сегменты железного сердечника перемещаются во второе положение под действием центробежной силы, и электрическая машина дополнительно сдержит:
устройство размещения, предусмотренное по окружности с наружной стороны подвижных сегментов железного сердечника для удержания подвижных сегментов железного сердечника от перемещения на расстояние, превышающее заданное максимальное расстояние.
9. Электрическая машина по п. 8, в которой подвижные сегменты железного сердечника перемещаются из первого положения во второе положение под действием центробежной силы, и подвижные сегменты железного сердечника возвращаются в первое положение из второго положения посредством по меньшей мере одной из магнитной силы или смещающей силы от устройства размещения.
10. Электрическая машина по п. 1, причем электрическая машина связана с транспортным средством, и транспортное средство содержит:
раму транспортного средства;
ось, связанную с рамой, при этом статор связан с осью, а ротор расположен по окружности с наружной стороны статора; и
колесо, способное вращаться на оси,
причем подвижные сегменты железного сердечника находятся в первом положении, когда колесо не вращается, и подвижные сегменты железного сердечника перемещаются во второе положение центробежной силой, когда колесо вращается с частотой вращения, превышающей пороговую частоту вращения.
11. Электрическая машина, которая содержит:
ротор; и
статор, отделенный от ротора воздушным зазором, причем статор имеет неподвижный железный сердечник и множество подвижных сегментов железного сердечника, способных перемещаться между первым положением, в котором подвижные сегменты железного сердечника находятся в контакте с неподвижным железным сердечником, и вторым положением, в котором подвижные сегменты железного сердечника отодвинуты от неподвижного железного сердечника,
при этом магнитное поле электрической машины ослаблено, когда подвижные сегменты железного сердечника находятся во втором положении.
12. Электрическая машина по п. 11, в которой подвижные сегменты железного сердечника находятся в контакте с поверхностью неподвижного железного сердечника, которая дистальна от статора.
13. Электрическая машина по п. 11, в которой ротор расположен по центру, а статор расположен по окружности с наружной стороны ротора.
14. Способ управления электрической машиной с постоянными магнитами, причем способ содержит этапы, на которых:
определяют уровень мощности, сообщаемый электрической машине;
определяют текущую частоту вращения электрической машины;
определяют требуемую напряженность поля для электрической машины на основе текущей частоты вращения и уровня мощности; и
перемещают подвижный сегмент железного сердечника ротора в положение, при котором напряженность поля для электрической машины приближенно равна требуемой напряженности поля.
15. Способ по п. 14, в котором требуемая напряженность поля является напряженностью магнитного поля, которая обеспечивает работу электрической машины в состоянии высокого КПД.
16. Способ по п. 14, в котором электрическая машина работает в качестве электродвигателя и уровень мощности запрашивается оператором электрической машины.
17. Способ по п. 14, в котором электрическая машина работает в качестве генератора, и требуемая напряженность поля определена напряжением, требуемым нагрузкой, подключенной к генератору.
18. Способ по п. 17, в котором нагрузка является аккумуляторной батареей.
19. Способ по п. 14, который дополнительно содержит этапы, на которых:
принимают запрос на изменение в работе между работой электрической машины в качестве генератора и работой электрической машины в качестве электродвигателя,
определяют новый уровень рабочей мощности на основе запроса на изменение; и
определяют требуемую напряженность поля для электрической машины на основе текущей частоты вращения и нового уровня рабочей мощности.
20. Способ по п. 19, в котором электрическая машина связана с транспортным средством и запрос на изменение содержит изменение между режимом тяговой мощности, когда электрическая машина работает в качестве электродвигателя, и режимом рекуперативного торможения, когда электрическая машина работает в качестве генератора.
| БЕСЩЕТОЧНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2001 |
|
RU2231200C2 |
| 0 |
|
SU400958A1 | |
| JP 2004072978 A, 04.03.2004 | |||
| US 6194802 B1, 27.02.2001 | |||
| US 2007228856 A1, 07.04.2004 | |||
| KR 20100041836 A, 22.04.2010. | |||

