Область техники, к которой относится изобретение
Данное изобретение относится к бесщеточному электродвигателю. В частности, данное изобретение относится к бесщеточному электродвигателю, используемому в качестве привода промышленного робота, машинного инструмента, электромобиля или электропоезда.
Уровень техники
Для миниатюризации электродвигателя и для увеличения выходной мощности и крутящего момента важно, чтобы плотность энергии Edc была высокой, что связано с отношением выходной мощности к объему двигателя. Кроме того, для упрощения конструкции электродвигателя важно минимизировать количество пазов для размещения обмотки и повышения эффективности операции намотки.
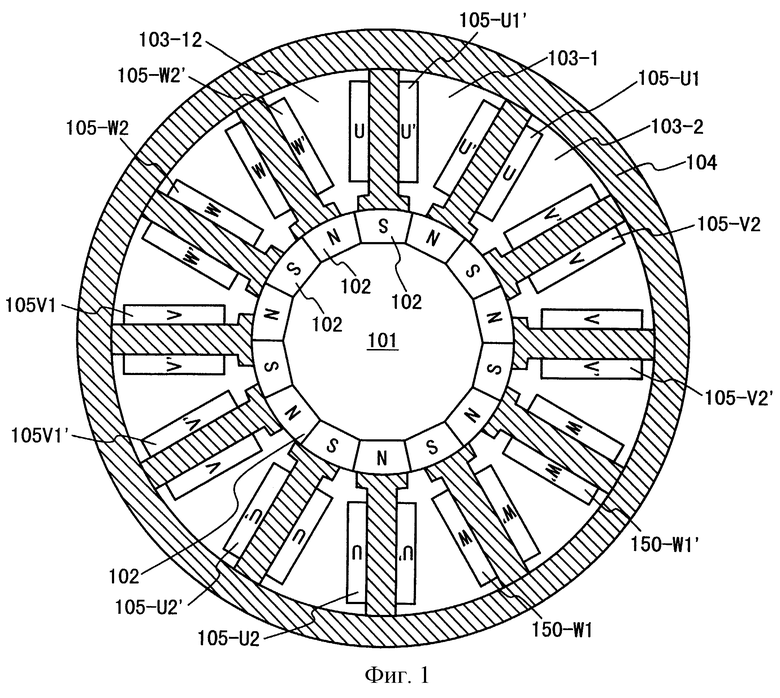
Такой бесщеточный электродвигатель раскрыт в выложенной заявке на патент Японии (JP-A-Heisei, 11-98791). Как показано на фиг.1, известный бесщеточный электродвигатель является бесщеточным электродвигателем постоянного тока с поверхностными магнитами, содержащим 14 полюсов и 12 пазов. Бесщеточный электродвигатель снабжен: группой постоянных магнитов 102, расположенных на цилиндрической поверхности ротора 14, в котором последовательно расположены 14 полюсов; и статором 104, в котором радиально расположены 12 пазов 103-1 - 103-12 на одной окружности с одинаковым угловым интервалом. Один комплект обмоток 105-U1, 105-V1 и 105-W1 и другой комплект обмоток 105-U2, 105-V2 и 105-W2, которые расположены соответствующим образом относительно друг друга, расположены в местах, в которых фазы взаимно сдвигаются против часовой стрелки на 120 градусов, в шести парах пазов, каждый из которых состоит из двух пазов, смежных друг с другом, из 12 пазов 103-1 - 103-12. Кроме того, шесть обмоток 105-U1’, 105-V1’, 105-W1’, 105-U2’, 105-V2’ и 105-W2’ расположены соответственно так, что они сдвинуты на угол поворота 30° относительно шести обмоток 105-U1, 105-V1, 105-W1, 105-U2, 105-V2 и 105-W2. Напряжение фазы U, имеющее фазу 0, подается в обмотку 105-U1 и в обмотки 105-U2, 105-U1’ и 105-U2’. Напряжение фазы V, имеющее фазу, отстающую на 120° от напряжения фазы U, подается в обмотки 105-V1, 105-V2, 105-V1’ и 105-V2’. Напряжение фазы W, имеющее фазу, отстающую на 120° от напряжения фазы V, подается в обмотки 105-W1, 105-W2, 105-W1’ и 105-W2’.
Выходной крутящий момент Т известного бесщеточного электродвигателя задан следующим уравнением:

где р обозначает число пар полюсов (число полюсов/2);
φ - максимальное потокосцепление постоянного магнита с током якоря;
Ia - ток якоря;
β - фаза тока якоря;
Ld - продольная индуктивность (индуктивность в направлении продольной оси d);
Lq - поперечная индуктивность (индуктивность в направлении поперечной оси q).
Фаза тока якоря определяется из предположения, что фаза напряжения U равна 0. Первое слагаемое правой части уравнения (1) представляет магнитный момент, а второе слагаемое правой части представляет реактивный момент.
В указанном выше бесщеточном электродвигателе с поверхностными магнитами, в котором постоянный магнит расположен на поверхности железного сердечника 101, из свойств этой конструкции следует равенство

где знак ≅ указывает, что Lq приблизительно (по существу или почти) равна Ld.
Таким образом, выходной крутящий момент бесщеточного электродвигателя с поверхностными магнитами по существу задан следующей формулой:
T=p{φIa Cos(β)}.
В соответствии с этим выходной компонент, представленный вторым слагаемым правой стороны предыдущей формулы, равен 0. Этот компонент представлен на выходе. Бесщеточный электродвигатель с поверхностными магнитами может эффективно использовать только магнитный момент, представленный первым слагаемым в правой части формулы (1). Поэтому исключается повышение плотности энергии.
Желательно увеличить плотность энергии путем эффективного использования реактивного момента, представленного вторым слагаемым в правой части формулы (1).
Сущность изобретения
Задачей данного изобретения является создание бесщеточного электродвигателя, в котором плотность энергии увеличена за счет эффективного использования реактивного момента.
Другой задачей данного изобретения является подавление пульсации момента бесщеточного электродвигателя.
Еще одной задачей данного изобретения является уменьшение тока якоря бесщеточного электродвигателя.
Еще одной задачей данного изобретения является уменьшение питающего напряжения, подаваемого в бесщеточный электродвигатель.
Еще одной задачей данного изобретения является миниатюризация бесщеточного электродвигателя.
Для решения задач данного изобретения бесщеточный электродвигатель содержит статор и ротор, имеющий боковую поверхность, противоположную статору. Статор имеет множество проходящих радиально железных сердечников и множество обмоток для создания магнитных полей в соответствующих железных сердечниках. Ротор содержит множество постоянных магнитов и индуцирующих магнитные силовые линии тел, расположенных между постоянными магнитами и боковой поверхностью.
В данном случае желательно, чтобы выходной крутящий момент задавался следующей формулой:

где р обозначает число пар полюсов (число полюсов/2);
φ - максимальное потокосцепление постоянного магнита с током якоря;
Ia - ток якоря;
β - фаза тока якоря;
Ld - продольная индуктивность (индуктивность в направлении продольной оси d);
Lq - поперечная индуктивность (индуктивность в направлении поперечной оси q).
При этом равенство Lq ≅ Ld не выполняется.
Предпочтительно также, чтобы ротор имел отверстия, в которые вставлены постоянные магниты в осевом направлении ротора.
Предпочтительно подавать в обмотки постоянный ток с тремя фазами.
Обмотки предпочтительно содержат первый комплект обмоток и второй комплект обмоток, и первый комплект трехфазных обмоток и второй комплект трехфазных обмоток расположены симметрично относительно линии.
Предпочтительно также, чтобы обмотки содержали первую группу трехфазных обмоток и вторую группу трехфазных обмоток, при этом обмотки, имеющие одинаковую фазу, первой и второй групп трехфазных обмоток расположены смежно друг с другом в одинаковом направлении вращения, при этом первая группа трехфазных обмоток содержит первый комплект трехфазных обмоток и второй комплект трехфазных обмоток, первый комплект трехфазных обмоток и второй комплект трехфазных обмоток расположены приблизительно геометрически симметрично относительно линии, вторая группа трехфазных обмоток содержит другой первый комплект трехфазных обмоток и другой второй комплект трехфазных обмоток, и другой первый комплект трехфазных обмоток и другой второй комплект трехфазных обмоток расположены приблизительно геометрически симметрично относительно линии.
Число обмоток равно N, число постоянных магнитов равно Р и Р предпочтительно больше N.
В этом случае предпочтительно, чтобы один из простых множителей Р был больше, чем любой из простых множителей N.
Предпочтительно также, чтобы первичный множитель N имел значения 2 и 3, а простой множитель Р имел значения 2 и 7.
Р предпочтительно соответствует следующему равенству: 12≤Р≤30.
Предпочтительно N равно 12 и Р равно 14.
Сечение постоянного магнита в плоскости, вертикальной к центральной оси ротора, предпочтительно является прямоугольным, при этом прямоугольник имеет короткие стороны и длинные стороны, которые длиннее коротких сторон, и длинные стороны расположены противоположно боковой поверхности.
Постоянный магнит имеет предпочтительно форму по существу прямоугольного параллелепипеда, и расстояние d между центром ротора и поверхностью магнитного полюса, противоположной боковой поверхности, среди поверхностей постоянных магнитов соответствует следующему уравнению: d≥r-D/10, где D=2πr/Р, r обозначает радиус ротора, Р - число постоянных магнитов.
Также предпочтительно справедливо следующее уравнение:
0≤(Lq-Ld)/Ld ≤ 0,3,
где Lq обозначает поперечную индуктивность ротора; Ld - продольную индуктивность ротора.
Кроме того, предпочтительно, чтобы индуцирующие магнитные силовые линии тела содержали индуцирующее продольные магнитные силовые линии тело для индуцирования магнитных потоков в направлении продольной оси, при этом индуцирующие магнитные силовые линии тела имеют зазор, проходящий в направлении поперечной оси ротора.
Краткое описание чертежей
На чертежах изображено:
фиг.1 - известный бесщеточный электродвигатель;
фиг.2 - конфигурация бесщеточного электродвигателя согласно первому варианту выполнения данного изобретения;
фиг.3 - график сравнения характеристик бесщеточного электродвигателя;
фиг.4 - другой график сравнения характеристик бесщеточного электродвигателя;
фиг.5 - конфигурация бесщеточного электродвигателя согласно второму варианту выполнения данного изобретения;
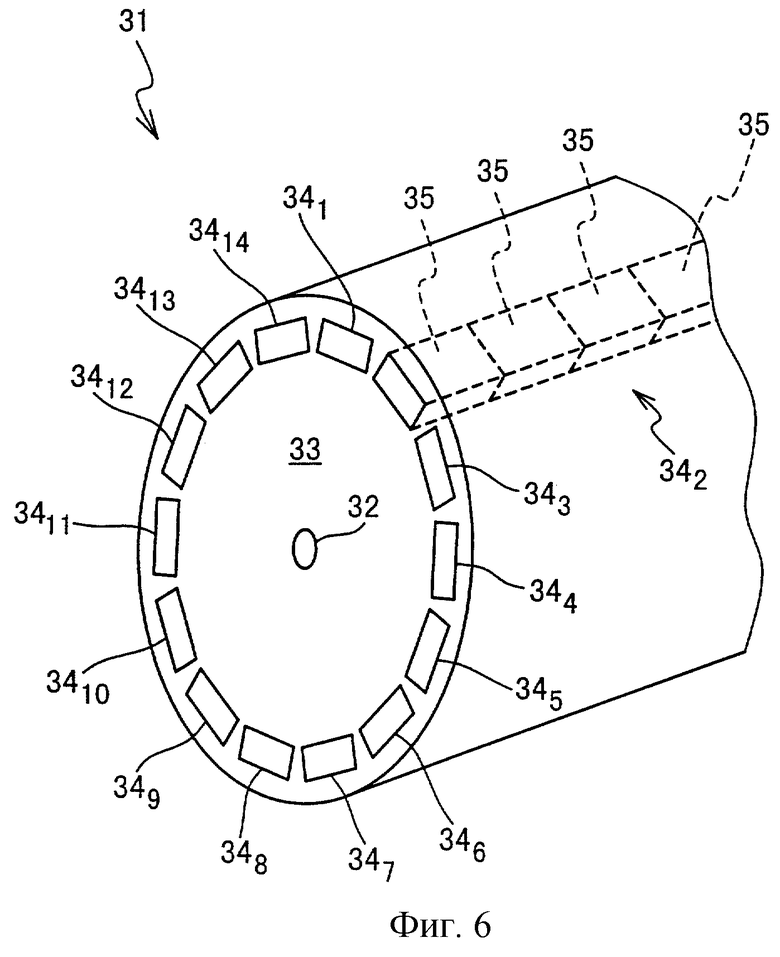
фиг.6 - конфигурация ротора 31;
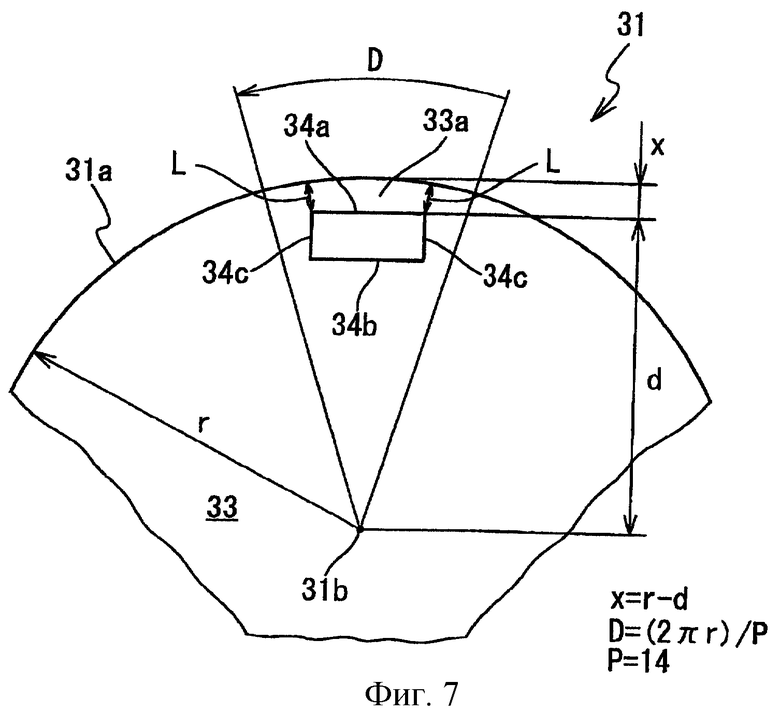
фиг.7 - часть ротора 31 в увеличенном масштабе;
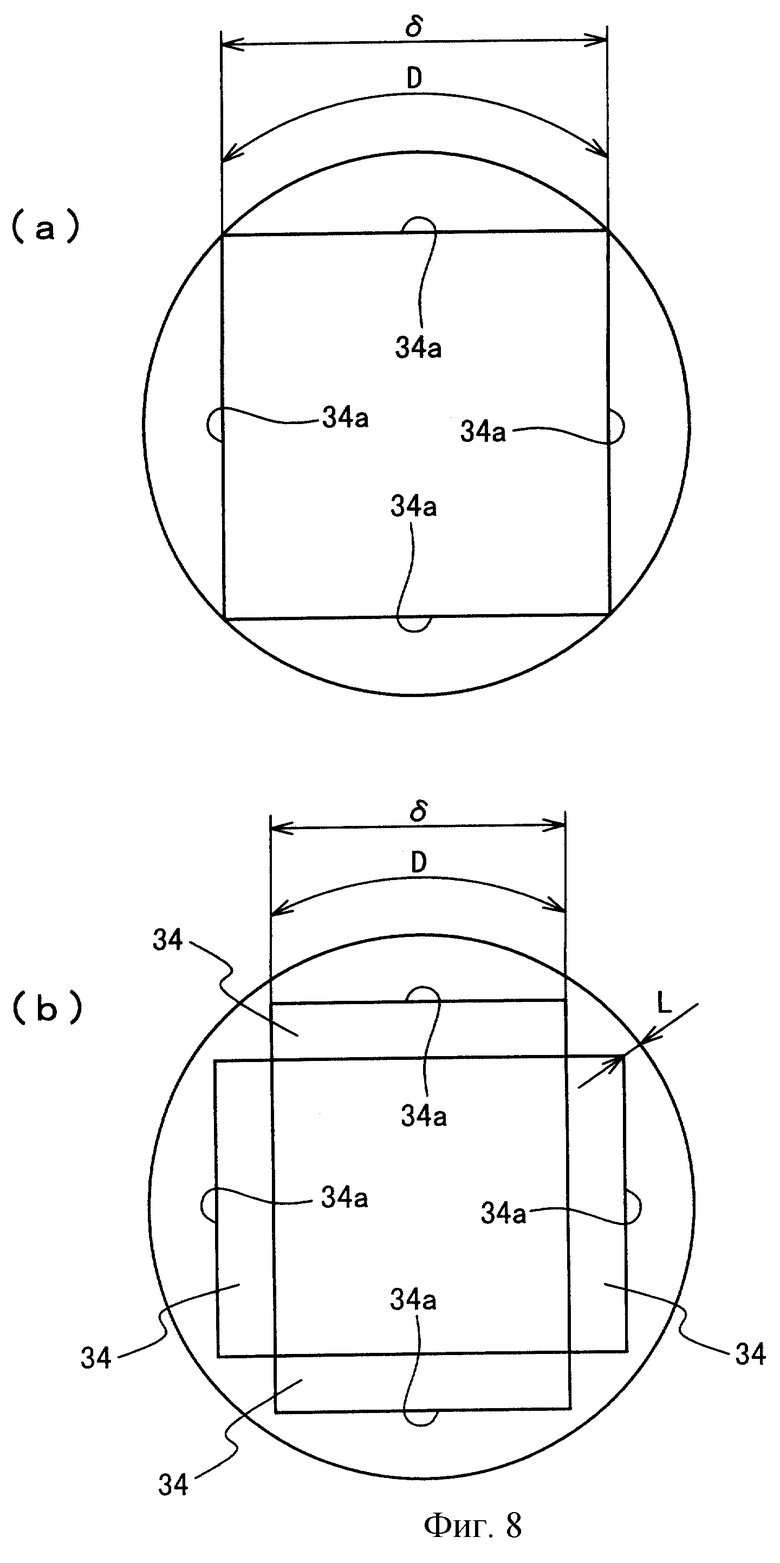
фиг.8А - иллюстрация коэффициента Mgc эффективной магнитной площади;
фиг.8В - иллюстрация коэффициента Mgc эффективной магнитной площади;
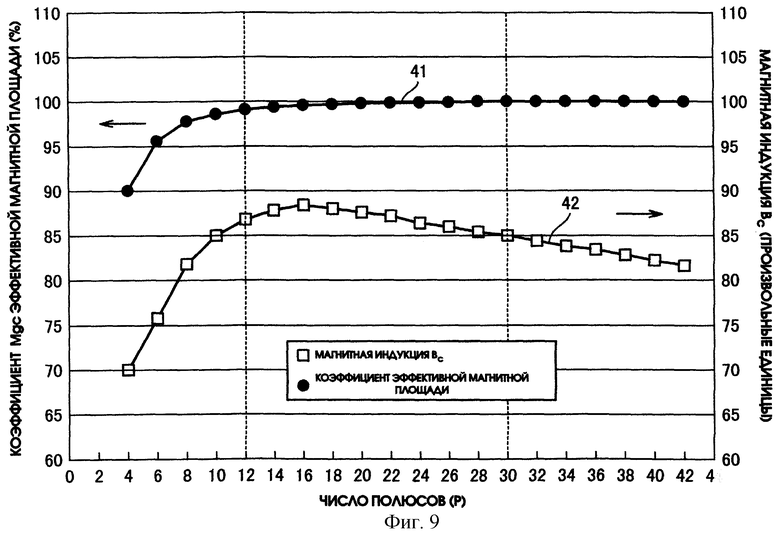
фиг.9 - зависимость коэффициента Mgc эффективной магнитной площади и магнитной индукции Bс от числа Р полюсов;
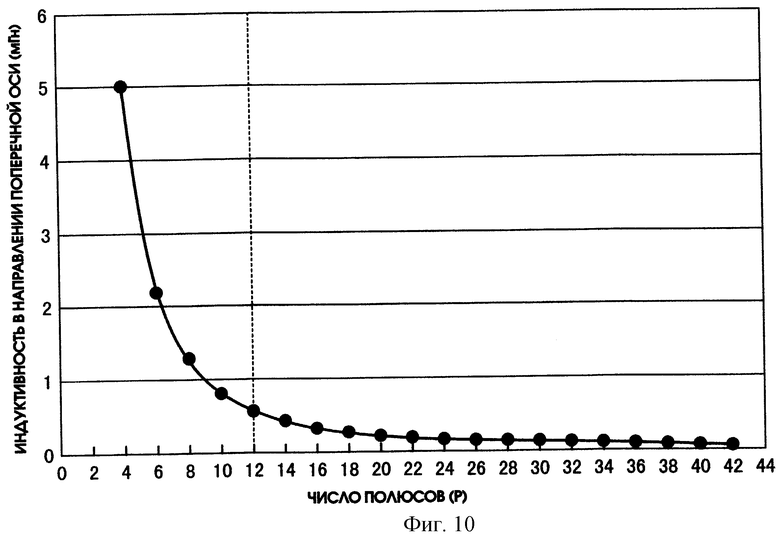
фиг.10 - зависимость поперечной индуктивности от числа Р полюсов;
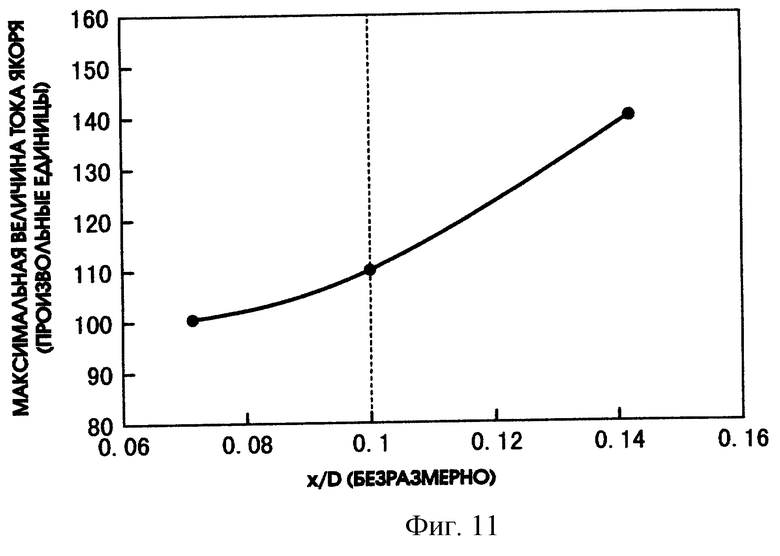
фиг.11 - зависимость тока Iа якоря от величины х заглубления;
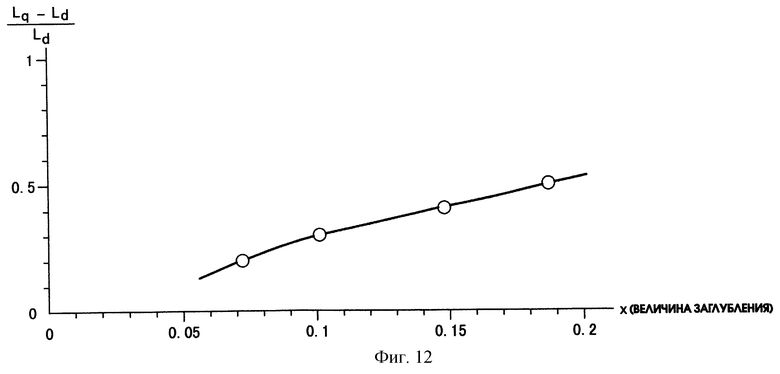
фиг.12 - зависимость между величиной х заглубления и (Lq-Ld)/Ld;
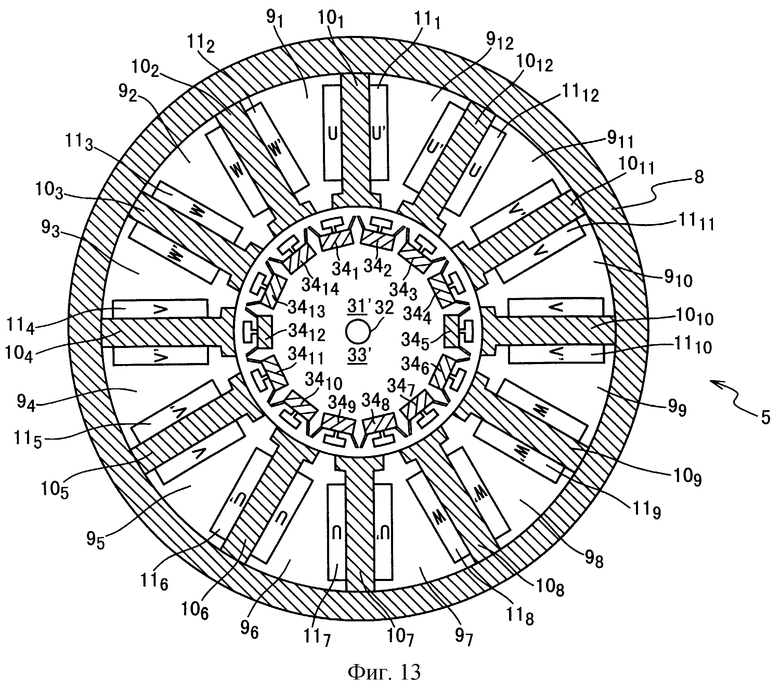
фиг.13 - конфигурация бесщеточного электродвигателя согласно третьему варианту выполнения данного изобретения;
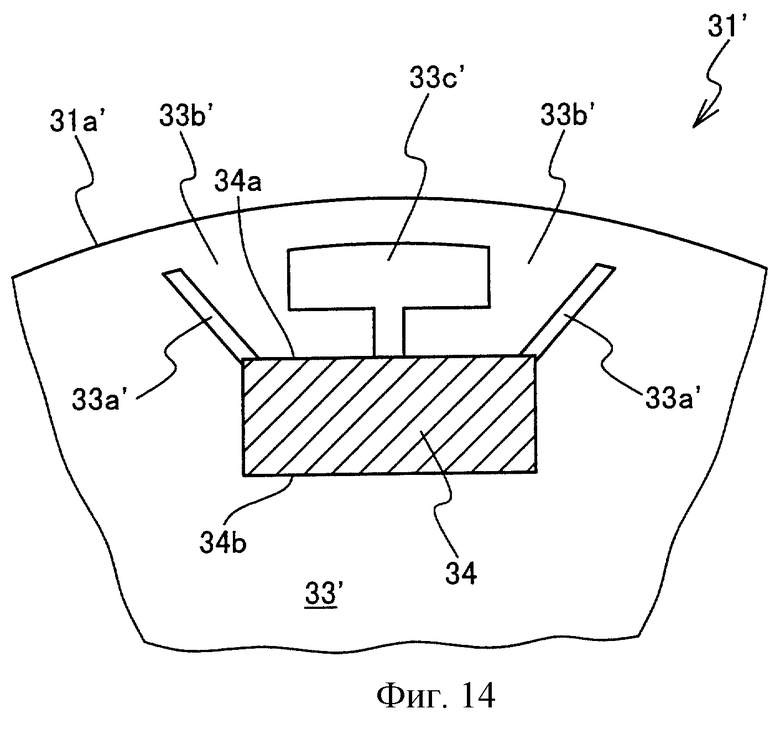
фиг.14 - конфигурация ротора 31’ в увеличенном масштабе;
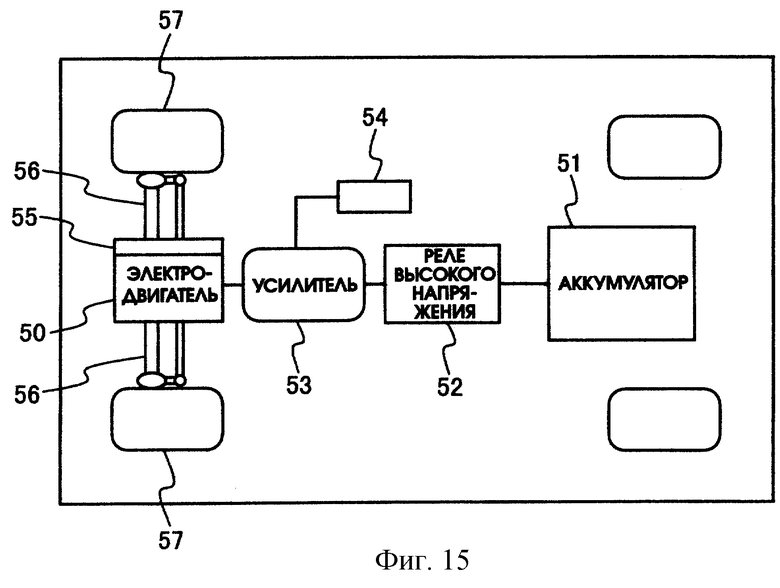
фиг.15 - электромобиль, содержащий бесщеточный электродвигатель; и
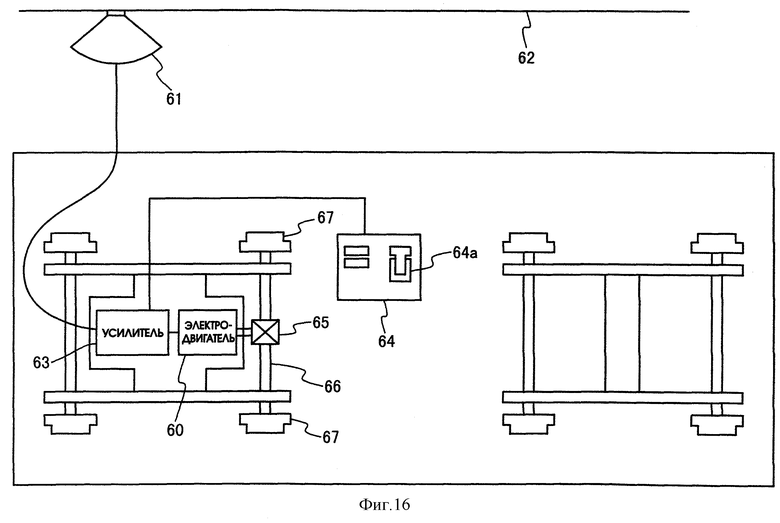
фиг.16 - электропоезд, содержащий бесщеточный электродвигатель.
Сведения, подтверждающие возможность осуществления изобретения
Первый вариант выполнения
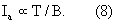
Бесщеточный электродвигатель, согласно первому варианту выполнения, является бесщеточным электродвигателем постоянного тока, приводимым во вращение трехфазным импульсным постоянным током. Бесщеточный электродвигатель имеет ротор 1, показанный на фиг.2. Ротор 1 состоит из индуцирующего силовые магнитные линии материала для индуцирования силовых магнитных линий, такого как кремнистая сталь или электромагнитная сталь. В ротор 1 заделаны 14 постоянных магнитов 2. 14-полюсный постоянный магнит 2 соответствует 14 постоянным магнитам. 14 постоянных магнитов 2 вставлены и размещены в 14 опорных отверстиях 4 в роторе 1, открытых в осевом направлении. Опорные отверстия 4 являются трапециевидными в сечении, перпендикулярном оси. Один прямоугольный стержневой магнит запрессован в каждое из опорных отверстий 4. Силовая магнитная линия, которая направлена от южного полюса к северному полюсу в каждом из постоянных магнитов 2, проходит в осевом направлении. Направления магнитных силовых линий, созданных двумя магнитами, смежных друг с другом, противоположны друг другу. 14 постоянных магнитов 2 расположены с одним угловым интервалом (=360°/14) на одной окружности. Магнитные силовые линии, созданные 14 магнитами, распределенными указанным образом в окружном направлении, создаются посредством объединения магнитных силовых линий, проходящих в окружном направлении, и магнитных силовых линий, проходящих в осевом направлении.
Ротор 1 имеет статор 5, имеющий опорную структуру. Статор 5 содержит цилиндрический кольцевой железный сердечник 8, железные сердечники 101-1012, проходящие в радиальном направлении от кольцевого железного сердечника 8, и обмотки 111-1112. В последующем железные сердечники 101-1012 в целом называются железными сердечниками 10, и обмотки 111-1112 в целом называются обмотками 11. Кольцевой железный сердечник 8 и железные сердечники 10 объединены в один блок. Имеется микрозазор между цилиндрической поверхностью, которая является внешней периферийной окружностью ротора 1, и внутренней поверхностью железного сердечника 10 в радиальном направлении. Железные сердечники 10 расположены на одной окружности с одинаковым интервалом (=360°/12). Центр кольцевого железного сердечника 8 совпадает с центром ротора 1. Между каждыми двумя железными сердечниками, смежными друг с другом, из железных сердечников 10 образованы соответствующие двенадцать пазов 91-912.
Обмотки 111-1112 намотаны соответственно вокруг железных сердечников 101-1012. Три обмотки 111, 115 и 119 из 12 обмоток 11 образуют первый комплект обмоток. Три обмотки, образующие первый комплект обмоток, расположены на одной окружности с одинаковым интервалом (=120°=360°/3). Другие три обмотки 117, 1111 и 113 из 12 обмоток 11 расположены в соответствующих местах, в соответствии с первым комплектом обмоток 111, 115, 119 относительно линии, и они образуют второй комплект обмоток. В данном случае центр линейной симметрии соответствует осевой линии оси вращения ротора 1.
Первый комплект обмоток и второй комплект обмоток образуют первую группу обмоток. Шесть обмоток, образующих вторую группу обмоток, расположены соответственно смежно в том же направлении вращения, что и шесть обмоток первой группы обмоток.
Фазы токов якоря, подаваемых в обмотки 111-1112, обозначены буквами U, V, W, U’, V’ и W’, как показано на фиг.2. Ток якоря с фазой U подается в обмотки 111, 116, 117 и 1112, ток якоря с фазой V подается в обмотки 114, 115, 1110 и 1111, ток якоря с фазой W подается в обмотки 112, 113, 118 и 1111. Ток якоря с фазой U, ток якоря с фазой V и ток якоря с фазой W являются импульсными постоянными токами, фазы которых сдвинуты на примерно 120° относительно друг друга. Временными интервалами якорных токов фазы U, фазы V и фазы W управляют, а именно управляют скоростью вращения магнитного поля, так что ротор 1 может вращаться с любой угловой скоростью вращения.
Направления, в которых протекают токи через обмотки 111-1112, также обозначены буквами U, V, W, U’, V’ и W’, как показано на фиг.2. Направления токов, обозначенные буквами U, V и W, противоположны направлениям токов, обозначенных буквами U’, V’ и W’ соответственно. Токи в противоположных друг другу направлениях при рассмотрении с одинаковой линии окружного направления протекают через две обмотки, расположенные симметрично относительно линии. Например, противоположные друг другу токи протекают через обмотку 111 и обмотку 117. Полярности двух постоянных магнитов 2, расположенных относительно одного углового положения вращения, в двух обмотках, имеющих указанную выше конфигурацию, противоположны друг другу. Например, хотя южный полюс постоянного магнита 21 направлен в ротор 1, северный полюс постоянного магнита 28 направлен в ротор 1. Якорные токи с противоположными друг другу направлениями одновременно проходят через соответствующие обмотки первой группы обмоток и соответствующие обмотки второй группы обмоток, которые имеют одинаковую фазу и расположены смежно с указанными выше соответствующими обмотками. Например, якорные токи с противоположными друг другу направлениями проходят через обмотку 1111 и обмотку 1112.
В бесщеточном электродвигателе, согласно данному изобретению, тот факт, что выходной крутящий момент больше, чем в известном бесщеточном электродвигателе, следует из уравнения (1). Уравнение (1) имеет следующий вид:
Т=р(ТM+TR);
Тм=φIa Cos(β);
tr=(Lq-Ld)I
где ТM является магнитным моментом, а TR - реактивным моментом.
14 постоянных магнитов 21-214 заделаны в ротор 1, и, таким образом, плотность магнитных силовых линий, замыкаемых магнитным путем в роторе 1, выше, чем в известном электродвигателе, показанном на фиг.1. Такое различие приводит к нецелевым значениям, Lq и Ld становятся более асимметричными, что приводит к справедливости следующего уравнения:

Ниже приводится сравнение известного бесщеточного электродвигателя с бесщеточным электродвигателем согласно данному изобретению. Если обозначить выходной крутящий момент известного бесщеточного электродвигателя Т’, а выходной крутящий момент бесщеточного электродвигателя согласно данному изобретению Т, то из уравнения (4) следует уравнение:

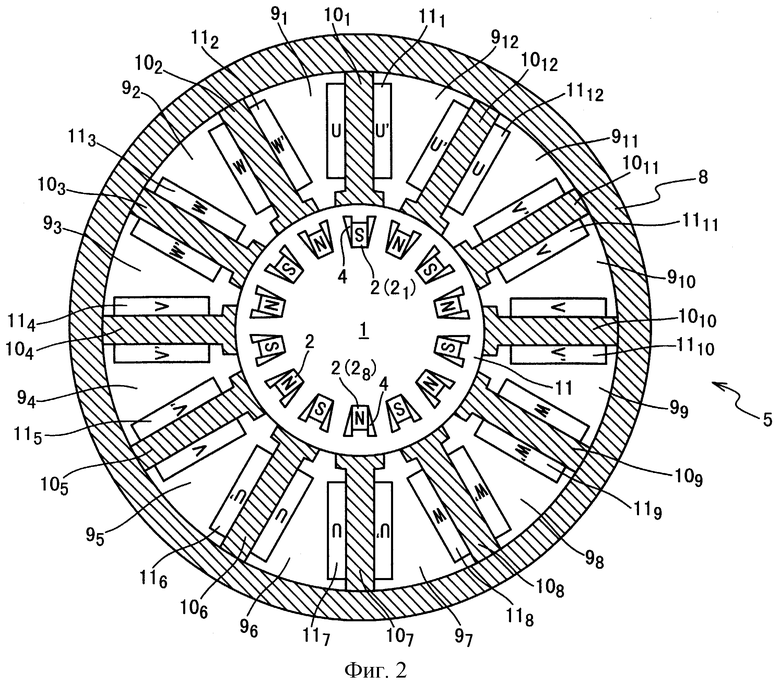
На фиг.3 и 4 показано сравнение характеристик известного бесщеточного электродвигателя и бесщеточного электродвигателя согласно данному изобретению. На фиг.3 показано сравнение характеристик, относящихся к соотношению между скоростью вращения и выходным крутящим моментом, а на фиг.4 показано сравнение характеристик, относящихся к соотношению между скоростью вращения и выходной мощностью. В бесщеточном электродвигателе, согласно данному изобретению, как выходной крутящий момент (в Нм), так и выходная мощность (в кВт) больше, чем у известного бесщеточного электродвигателя.
Кроме того, бесщеточный электродвигатель согласно данному изобретению имеет следующие преимущества по сравнению с известным бесщеточным электродвигателем в его оригинальном состоянии:
1. Бесщеточный электродвигатель имеет высокий коэффициент намотки и высокую плотность энергии.
2. Меньшее число пазов и высокую эффективность изготовления.
3. Индекс создания момента от зубцовых гармонических помех поля, а именно наименьший общий множитель для числа 14 полюсов и числа 12 пазов, является высоким, так что частота пульсации момента увеличивается.
Высокая частота пульсации момента является предпочтительной, поскольку она минимизирует влияние на механическую систему, которая обычно управляется в диапазоне низких частот.
Кроме того, внутреннее расположение постоянных магнитов стимулирует положение выступающего полюса в системе магнитных сил так, что Lq не равно Ld. Таким образом, эффективно используется реактивный момент, что приводит к более высокой плотности энергии, а именно к более высокой выходной мощности. Отсюда появляется возможность миниатюризации.
Второй вариант выполнения
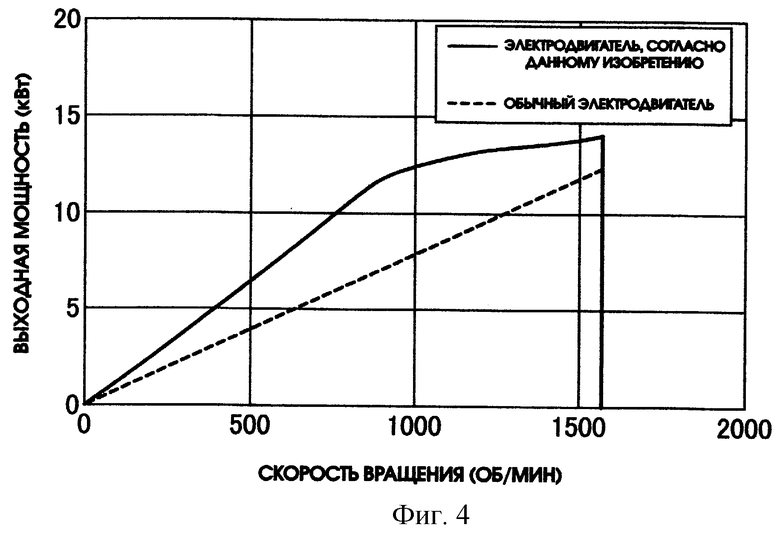
Бесщеточный электродвигатель согласно второму варианту выполнения является бесщеточным электродвигателем постоянного тока, имеющим структуру, аналогичную бесщеточному электродвигателю согласно первому варианту выполнения. Бесщеточный электродвигатель согласно второму варианту выполнения отличается от бесщеточного электродвигателя согласно первому варианту выполнения структурой ротора. Бесщеточный электродвигатель во втором варианте выполнения содержит статор 5 и ротор 31, как показано на фиг.5. Структура статора 5 одинакова со структурой, описанной применительно к первому варианту выполнения.
Ротор 31 обращен к статору 5 боковой поверхностью 31а ротора. Ротор 31 соединен с возможностью вращения с валом 32. Ротор 31 вращается на валу 32. Ротор 31 содержит железный сердечник 33 ротора и 14 постоянных магнитов 341-3414, как показано на фиг.5. Постоянные магниты 341-3414 называются в целом постоянными магнитами 34.
Железный сердечник 33 ротора образован из прокатанных тонких пластин кремнистой стали. Соответствующие пластины из кремнистой стали электрически изолированы друг от друга. Это уменьшает потери на вихревые токи. Каждая пластина из кремнистой стали штампована и снабжена отверстиями, в которые заделаны постоянные магниты 34. Постоянные магниты 34 вставлены в отверстия. Таким образом, постоянные магниты 34 заделаны в железный сердечник 33 ротора. Необходимо отметить, что железный сердечник 33 ротора может быть выполнен из другого материала, например из пластин электротехнической стали.
На фиг.6 показана структура ротора 31 в осевом направлении. На фиг.6 показана структура постоянного магнита 342 из постоянных магнитов 34. Другие постоянные магниты 34 имеют ту же структуру, что и постоянный магнит 342. Каждый постоянный магнит 34 состоит из множества магнитов 35, соединенных в осевом направлении ротора 31, как показано на фиг.6. Магниты 35 электрически изолированы друг от друга. Таким образом, уменьшаются потери, вызываемые вихревыми токами.
Постоянные магниты 34 имеют по существу форму прямоугольного параллелепипеда. Постоянные магниты, имеющие форму прямоугольного параллелепипеда, имеют преимущество простого изготовления постоянных магнитов 34. В известном бесщеточном электродвигателе, показанном на фиг.1, постоянные магниты, имеющие изогнутые поверхности, расположены на сторонах ротора 101. Изготовление постоянных магнитов, имеющих изогнутые поверхности, повышает их стоимость. В бесщеточном электродвигателе в данном варианте выполнения постоянные магниты 34 имеют форму прямоугольного параллелепипеда, что снижает стоимость.
Северные полюсы постоянных магнитов 341, 343, 345, 347, 349, 3411 и 3413 из постоянных магнитов 34 расположены на наружной стороне ротора 31 в радиальном направлении, а их южные полюсы расположены на внутренней стороне ротора 31. С другой стороны, южные полюсы постоянных магнитов 342, 344, 346, 348, 3410, 3412 и 3414 из постоянных магнитов 34 расположены на наружной стороне ротора 31 в радиальном направлении, а их северные полюсы расположены на внутренней стороне ротора 31 в радиальном направлении. Таким образом, два постоянных магнита, смежные друг с другом, из постоянных магнитов 34 создают магнитные силовые линии в направлениях, противоположных друг другу.
На фиг.7 показана часть ротора 31 в увеличенном масштабе. Постоянный магнит 34 имеет поверхность 34а, противоположную боковой поверхности 31а ротора 31, и поверхность 34b, противоположную центру 11b ротора 31. Два магнитных полюса постоянных магнитов 34 расположены на противоположных поверхностях 34а и 34b. Противоположные поверхности 34а и 34b образуют длинные стороны прямоугольника, образованного в сечении постоянного магнита 34, расположенного в направлении, вертикальном к центральной оси ротора 31.
Постоянные магниты 34 расположены вблизи боковой поверхности 31а ротора. Боковая поверхность 31а ротора и постоянные магниты 34 расположены как можно ближе друг к другу в концевой части 34с. Таким образом, если величину заделки постоянного магнита 34 обозначить х, а расстояние между боковой поверхностью 31а ротора и концевыми частями 34с обозначить L, то справедливо следующее уравнение:
х>L.
В данном случае величина заделки х определена как разница между радиусом r ротора 31 и расстоянием d до центра 11b ротора 31 от противоположной поверхности 34а, которая является плоскостью, противоположной боковой поверхности 31а ротора, среди поверхностей постоянных магнитов 34. Таким образом, величина х заделки равна

Поскольку ротор 31 имеет указанную выше структуру, то магнитный поток, образованный постоянными магнитами 34, используется более эффективно для создания магнитного момента. Боковая поверхность 31а ротора и постоянные магниты 34 расположены как можно ближе друг к другу у концевой части 34с, и это уменьшает магнитные силовые линии, проходящие между боковой поверхностью 31а ротора и концом 34с среди магнитных силовых линий, создаваемых постоянными магнитами 34. Таким образом, создается более сильный магнитный момент. Тем самым бесщеточный электродвигатель в этом варианте выполнения может иметь сильный магнитный момент, также как известный бесщеточный электродвигатель.
С точки зрения создания магнитного момента, расстояние L между боковой поверхностью 31а ротора и концевой частью 34с должно быть небольшим. Чем меньше расстояние между боковой поверхностью 31а ротора и концевой частью 34с, тем меньше количество магнитных силовых линий, проходящих между боковой поверхностью 31а ротора и концевой частью 34с, из магнитных силовых линий, создаваемых постоянными магнитами 34. Расстояние между боковой поверхностью 31а ротора и концевой частью 34с желательно выбирать так, чтобы по существу все магнитные силовые линии, создаваемые постоянными магнитами 34, проходили через боковую поверхность 31а ротора.
С другой стороны, небольшое расстояние между боковой поверхностью 31а ротора и концевой частью 34с снижает механическую прочность железного сердечника 33 ротора для удерживания постоянных магнитов 34. Если механическая прочность является слишком низкой, то железный сердечник 33 ротора повреждается с отделением постоянного магнита 34 от ротора 31 при вращении ротора 31. Расстояние между боковой поверхностью 31а ротора и концевой частью 34c желательно выбирать как минимальное расстояние при одновременном сохранении механической прочности для предотвращения отделения постоянного магнита 34 при вращении ротора 31. Согласно эксперименту, проведенному изобретателем, было подтверждено, что расстояние между боковой поверхностью 31а ротора и концевой частью 34с может быть выбрано так, чтобы по меньшей мере 95% магнитных силовых линий, созданных магнитным полюсом на противоположной стороне 34а, проходили через боковую поверхность 31а ротора при одновременном сохранении механической прочности.
Постоянные магниты 34 не соприкасаются с боковой поверхностью 31а ротора, в то время как постоянные магниты 34 расположены вблизи боковой поверхности 31а ротора. Постоянный магнит 34 заделан в железный сердечник 33 ротора. Таким образом, железный сердечник 33 ротора содержит индуцирующее магнитные силовые линии тело 33а, расположенное между постоянными магнитами 34 и боковой поверхностью 31а ротора.
Наличие индуцирующего магнитные силовые линии тела 33а способствует уменьшению входного напряжения V бесщеточного электродвигателя в этом варианте выполнения. Входное напряжение V равно:

где R - сопротивление якоря;
ω - угловая частота вращения ротора;
Id - продольная составляющая тока Iа якоря (Id=Ia sin(β));
Iq - поперечная составляющая тока Iа якоря (Iq=Ia cos(β));
Vc - напряжение, индуцированное в катушке якоря при вращении ротора.
Наличие индуцирующего магнитные силовые линии тела 33а приводит к ослаблению поля на роторе 31. Кроме того, наличие индуцирующего магнитные силовые линии тела 33а приводит к увеличению индуктивности Ld в направлении продольной оси. В соответствии с этим (-ωLdId+Vc) приближается к 0. Как следует из уравнения (7), при (-ωLdId+Vc), близком к 0, входное напряжение V становится меньше. Таким образом, наличие индуцирующего магнитные силовые линии тела 33а приводит к уменьшению входного напряжения V бесщеточного электродвигателя.
Одновременно наличие индуцирующего магнитные силовые линии тела 33а способствует созданию реактивного момента. Таким образом, бесщеточный электродвигатель согласно изобретению использует магнитный момент аналогично известному бесщеточному электродвигателю и дополнительно использует реактивный момент. С помощью бесщеточного электродвигателя, согласно данному варианту выполнения, можно получать большой крутящий момент, поскольку с большой эффективностью используется магнитный момент и дополнительно используется реактивный момент.
Однако в отличие от известного бесщеточного электродвигателя доля реактивного момента в крутящем моменте, создаваемом бесщеточным электродвигателем согласно данному варианту выполнения, является небольшой. Это объясняется тем, что постоянные магниты 34 расположены вблизи боковой поверхности 31а ротора и объем индуцирующего магнитные силовые линии тела 33а является небольшим. Основной крутящий момент, создаваемый бесщеточным электродвигателем в этом варианте выполнения, является магнитным моментом. Поскольку создаваемый крутящий момент является в основном магнитным моментом, то пульсация момента не велика в бесщеточном электродвигателе согласно данному варианту выполнения.
В бесщеточном электродвигателе, согласно этому варианту выполнения, число постоянных магнитов 34, а точнее число Р полюсов оказывает большое влияние на свойства бесщеточного электродвигателя в этом варианте выполнения. В бесщеточном электродвигателе, согласно этому варианту выполнения, число постоянных магнитов 34 определено как будет указано ниже, так что его свойства улучшены. Число постоянных магнитов 34 можно называть числом Р полюсов.
Прежде всего число постоянных магнитов 34 определено из условия, что оно должно быть больше числа пазов 9. Другими словами, число постоянных магнитов 34 должно быть больше, чем число железных сердечников 10 и число обмоток 11, поскольку число пазов 9 равняется числу железных сердечников 10 и числу обмоток 11. Таким образом, магнитный контур является однородным для подавления за счет этого пульсаций крутящего момента.
Кроме того, число постоянных магнитов 34 выбирается из диапазона между 12 и 30. Ниже приводится описание правомерности выбора числа постоянных магнитов 34 из диапазона между 12 и 30.
Прежде всего предположим, что толщина постоянных магнитов 34 составляет фактически 0, как показано на фиг.8А. В данном случае причиной предположения, что толщина постоянных магнитов 34 фактически равна 0, является предполагаемый идеальный случай расположения постоянных магнитов 34 в условиях наибольшей плотности. Сторона 34а, противоположная боковой поверхности 31а ротора из всех поверхностей постоянных магнитов 34, образует многоугольник, вписанный в сечение ротора 31.
Определим коэффициент Mgc эффективной магнитной площади как отношение суммы площадей противоположных поверхностей 34а постоянных магнитов 34 к площади боковой поверхности 31а ротора. Тогда коэффициент Mgc эффективной магнитной поверхности задан формулой
Mgc=δ/D·100(%),
где D=2πr/Р;
r обозначает радиус ротора 31;
Р - число полюсов (число постоянных магнитов);
δ равно ширине противоположной поверхности 34а постоянных магнитов 34 в окружном направлении ротора 31. Тот факт, что коэффициент Mgc эффективной магнитной площади близок к 100%, приводит к тому, что большое число магнитных силовых линий, создаваемых постоянными магнитами 34, входит в потокозацепление с обмотками 111-1112.
Кривая 41 на фиг.9 показывает зависимость коэффициента Mgc эффективной магнитной площади от числа Р полюсов. Как показано на фиг.9, чем больше число Р полюсов, тем больше коэффициент Mgc эффективной магнитной площади. Кривая достигает по существу насыщения при числе Р полюсов, равном 12. Из этого факта следует, что магнитную индукцию В потоков, находящихся в потокозацеплении с обмотками 111-1112, можно существенно максимизировать путем выбора числа Р полюсов равным 12 или более при предположении, что толщина постоянного магнита 34 фактически равна 0.
Однако в действительности нельзя представить бесконечно тонкие постоянные магниты 34. Желательно, чтобы толщина постоянных магнитов 34 была небольшой, однако толщина постоянных магнитов 34 ограничена механической прочностью, коэрцитивной силой постоянного магнита 34 и другими факторами. При этом постоянный магнит 34 не может быть в контакте с боковой поверхностью 31а ротора. Как указывалось выше, расстояние L между концами постоянных магнитов 34 и боковой поверхностью 31а ротора должно быть желательно небольшим. Однако для обеспечения механической прочности необходимо, чтобы расстояние L было больше определенной величины. Поэтому ниже приводится описание случая, в котором постоянный магнит 34 имеет определенную толщину β и имеется определенное расстояние L между концами постоянных магнитов 34 и боковой поверхностью 31а ротора, как показано на фиг.8В.
Ширина δ противоположной поверхности 34а уменьшается за счет наличия толщины β постоянных магнитов 34. Тот факт, что постоянные магниты 34 имеют толщину β, приводит к уменьшению магнитной индукции Bс магнитных потоков, проходящих через боковую поверхность 31а ротора.
Кроме того, наличие расстояния L до боковой поверхности 31а ротора от концевой части постоянного магнита 34 приводит к образованию магнитного контура между противоположными поверхностями 34а двух постоянных магнитов 34, смежных друг с другом. Магнитное сопротивление магнитного контура тем меньше, чем меньше расстояние между двумя противоположными поверхностями 34а. В данном случае, поскольку число постоянных магнитов 34 больше, то расстояние между двумя противоположными поверхностями 34а меньше, что приводит к уменьшению магнитного сопротивления между ними. Это связано с увеличением магнитных потоков, которые не вносят вклада в создание крутящего момента, поскольку они замыкаются внутри ротора 31, если число постоянных магнитов 34 является большим.
Вследствие действия как коэффициента Mgc эффективной магнитной площади, так и магнитного сопротивления между двумя противоположными поверхностями 34а, магнитная индукция Bс магнитных потоков, проходящих через боковую поверхность 31а ротора, становится максимальной при определенном числе Р полюсов. Кривая 42 на фиг.9 показывает зависимость числа Р полюсов от магнитной индукции Bс магнитных потоков, проходящих через боковую поверхность 31а ротора, когда толщина β постоянного магнита 34 и расстояние L до боковой поверхности 31а ротора от концевых частей постоянных магнитов 34 имеют величины, которые заявитель считает минимальными величинами, которые могут быть установлены на 8 ноября 2000 г. При этом магнитная индукция Bс показана относительно величины 100, которая соответствует магнитной индукции магнитных потоков, проходящих через боковую поверхность 31а ротора, при предположении, что магнит находится против всей боковой поверхности ротора.
Как следует из кривой 42 на фиг.9, в диапазоне числа Р полюсов от 12 и менее магнитная индукция Bс магнитных потоков, проходящих через боковую поверхность 31а ротора, резко увеличивается с увеличением числа Р полюсов. Если число Р полюсов становится больше 12, то магнитная индукция Bс почти достигает насыщения и имеет максимальное значение при числе Р полюсов, равном 16. Если число Р полюсов становится больше 16, то магнитная индукция Bс постепенно уменьшается. Число Р полюсов, при котором магнитная индукция Bс превосходит 85 (произвольных единиц), находится в диапазоне от 12 до 30. Таким образом, магнитная индукция Bс магнитных потоков, проходящих через боковую поверхность 31а ротора, может быть увеличена посредством установки числа Р полюсов в диапазоне от 12 до 30. При увеличении магнитной индукции Bс выходной крутящий момент бесщеточного электродвигателя становится соответственно сильнее.
С другой стороны, можно уменьшить входной ток, необходимый для получения определенного крутящего момента, за счет установки диапазона числа Р полюсов от 12 до 30. Как известно, выходной крутящий момент Т пропорционален току Iа якоря, проходящему через обмотки 111-1112, и магнитной индукции В магнитных потоков, находящихся в потокозацеплении с обмотками 111-1112, и Т∝Ia В, т.е.
Как следует из уравнения (8), если большее число линий магнитного потока, созданного постоянными магнитами 34, входят в потокозацепление с обмотками 111-1112, то снижается якорный ток Iа, необходимый для получения определенного крутящего момента. Тот факт, что ток якоря может быть уменьшен, приводит к уменьшению мощности усилителя для подачи электрической энергии в бесщеточный электродвигатель. Такое свойство предпочтительно при использовании бесщеточного электродвигателя в качестве источника энергии в электромобиле, имеющем ограниченное пространство.
Как следует из приведенных выше фактов, можно получить более сильный крутящий момент путем выбора числа Р полюсов в диапазоне от 12 до 30. Кроме того, можно уменьшить якорный ток Iа, необходимый для получения определенного крутящего момента.
Выбор числа Р полюсов равным 12 или более имеет также преимущество с точки зрения уменьшения индуктивности Lq в направлении поперечной оси. На фиг.10 показана зависимость индуктивности Lq в направлении поперечной оси от числа Р полюсов при условии, что постоянные магниты 34 расположены так, что сумма площадей противоположных поверхностей 34а является максимальной для каждого числа Р полюсов. В диапазоне, в котором число Р полюсов равно 12 или менее, индуктивность Lq в направлении поперечной оси резко уменьшается при увеличении числа Р полюсов. В диапазоне, в котором число Р полюсов равно 12 или более, степень уменьшения становится меньше.
В данном случае, как следует из уравнения (7), уменьшение индуктивности Lq в направлении поперечной оси позволяет уменьшить входное напряжение V на обмотках 111-1112. To есть, входное напряжение V на обмотках 111-1112 можно экстремально понизить путем выбора числа Р полюсов равным 12 или более.
Как указывалось выше, с точки зрения увеличения эффективной магнитной индукции Bс и уменьшения входного напряжения V желательно выбирать число Р полюсов бесщеточного электродвигателя в диапазоне от 12 до 30.
Бесщеточный электродвигатель согласно данному варианту выполнения удовлетворяет указанным выше условиям, поскольку число полюсов равно 14, а число пазов 9 равно 12. В бесщеточном электродвигателе в этом варианте выполнения число полюсов и число пазов могут быть любой другой комбинацией, помимо 14 полюсов и 12 пазов. Однако с точки зрения миниатюризации и более высокой выходной мощности желательно использовать структуру, состоящую из 14 полюсов и 12 пазов, как описано в этом варианте выполнения.
Кроме того, в бесщеточном электродвигателе постоянные магниты 34 расположены в указанном ниже положении для улучшения его свойств.
Положения постоянных магнитов 34 выбраны так, что величина х заглубления удовлетворяет следующему уравнению:

где D=2πr/Р;
r - радиус ротора 31;
Р - число полюсов (число постоянных магнитов 34).
Малая величина х заглубления приводит к тому, что постоянные магниты 34 и боковая поверхность 31а ротора расположены ближе друг к другу. Кстати, условие уравнения (9) имеет то же значение, что и следующее уравнение:

относительно расстояния d между противоположной поверхностью 34а и центром 11b ротора 31. Более длинное расстояние d означает более близкое расположение постоянных магнитов 34 к боковой поверхности 31а ротора.
На фиг.11 показана зависимость от величины х заглубления тока Iа якоря, проходящего через обмотки 111-1112 для создания необходимого крутящего момента. На фиг.11 показано пиковое значение тока Iа якоря. Как показано на фиг.11, условие х≤D/10 приводит к резкому падению тока Iа якоря, проходящего через обмотки 111-1112.
Другими словами, положения постоянных магнитов 34 выбраны так, чтобы соблюдалось следующее уравнение:

На фиг.12 показана взаимосвязь между величиной х заглубления и (Lq-Ld)/Ld. Величина х заглубления и (Lq-Ld)/Ld находятся в прямой зависимости. Чем меньше величина х заглубления, тем меньше (Lq-Ld)/Ld. Когда х=D/10, то (Lq-Ld)/Ld=0,3. Уравнение (9) прямо соответствует уравнению (10).
И наоборот, даже если структура железного сердечника 33 ротора и положения постоянных магнитов 34 отличаются от указанных выше случаев, если они выбраны с удовлетворением условия уравнения (10), то возможно получить эффект, аналогичный случаю, когда форма железного сердечника 33 ротора и положения постоянных магнитов 34 одинаковы с указанным выше случаем.
В этом случае предпочтительно справедливо уравнение

Это происходит потому, что выходной крутящий момент уменьшается, когда (Lq-Ld)<0, как следует из уравнения (1).
То есть, предпочтительно удовлетворяется следующее уравнение:

Третий вариант выполнения
Бесщеточный электродвигатель согласно третьему варианту выполнения является бесщеточным электродвигателем постоянного тока, имеющим структуру, аналогичную второму варианту выполнения. В бесщеточном электродвигателе в третьем варианте выполнения структура ротора отличается от структуры в первом и втором вариантах выполнения. В частности, структура железного сердечника ротора отличается от первого и второго вариантов выполнения. Другие части одинаковы с первым и вторым вариантами выполнения.
На фиг.13 показана структура бесщеточного электродвигателя в третьем варианте выполнения. Бесщеточный электродвигатель, согласно третьему варианту выполнения, снабжен ротором 31’ и статором 5. Структура статора 5 одинакова с первым вариантом выполнения.
На фиг.14 показана часть ротора 31’ в увеличенном масштабе. Ротор 31’ содержит железный сердечник 33’ ротора и постоянные магниты 34. Постоянный магнит 34 имеет противоположную поверхность 34а, расположенную напротив боковой поверхности 31а ротора 31, и противоположную сторону 34b, расположенную напротив центра 11b ротора 31. Два магнитных полюса постоянного магнита 34 расположены на противоположных поверхностях 34а и 34b. Постоянные магниты 34 создают линии магнитного потока в радиальном направлении ротора 31’.
Северные полюсы постоянных магнитов 341, 343, 345, 347, 349, 3411 и 3413 из постоянных магнитов 34 расположены на наружной стороне в радиальном направлении ротора 31, а их южные полюсы расположены на внутренней стороне ротора 31. С другой стороны, южные полюсы постоянных магнитов 342, 344, 346, 348, 3410, 3412 и 3414 из постоянных магнитов 34 расположены на наружной стороне ротора 31 в радиальном направлении, а их северные полюсы расположены на внутренней стороне ротора 31 в радиальном направлении. Таким образом, два постоянных магнита, смежные друг с другом, из постоянных магнитов 34 создают магнитные силовые линии в направлениях, противоположных друг другу.
Постоянный магнит 34 расположен вблизи боковой поверхности 31а’ ротора. Хотя постоянный магнит 34 расположен вблизи боковой поверхности 31а’ ротора, он не выходит к боковой поверхности 31а ротора. Постоянный магнит 34 заделан в железный сердечник 33’ ротора. Постоянный магнит 34 является по существу прямоугольным параллелепипедом. Боковая поверхность 31а ротора и постоянный магнит 34 расположены ближе всего друг к другу у концевой части 34с.
Ротор 31’, имеющий указанную выше структуру, увеличивает число линий магнитного потока, находящихся в потокозацеплении со статором 5 после прохождения через боковую поверхность 31а ротора из линий магнитного потока, создаваемых постоянными магнитами 34.
В данном случае в железном сердечнике 33’ ротора выполнены прорези 33а’. Прорези 33а’ проходят от концевых частей 34с постоянных магнитов 34 в направлении стороны 11’ ротора. Однако прорези 33а’ не достигают стороны 11’ ротора.
Прорези 33а’ дополнительно уменьшают количество линий магнитного потока, замыкающихся внутри ротора 31’, из линий магнитного потока, создаваемых постоянными магнитами 34. Таким образом, бесщеточный электродвигатель согласно третьему варианту выполнения может обеспечивать получение сильного крутящего момента аналогично второму варианту выполнения.
Железный сердечник 33’ ротора имеет индуцирующее магнитные силовые линии в направлении продольной оси тело 33b’, расположенное между постоянными магнитами 34 и боковой поверхностью 31а ротора. Индуцирующее магнитные силовые линии в направлении продольной оси тело 33b’ проходит от боковой поверхности 31а’ ротора в направлении продольной оси (оси d) ротора 31’ и достигает поверхности постоянных магнитов 34. Линии магнитного поля в направлении продольной оси, созданные постоянными магнитами 34, проходят через индуцирующее линии магнитного потока в направлении продольной оси тело 33b’ и достигают боковую поверхность 31а’ ротора и далее вступают в потокозацепление со статором 5. Индуцирующее линии магнитного поля в направлении продольной оси тело 33b’ определяет индуктивность Ld в продольном направлении ротора 31’. Индуктивность Ld в продольном направлении определяется, в частности, шириной в окружном направлении индуцирующего линии магнитного поля в направлении продольной оси тела 33b’.
Ширина в окружном направлении индуцирующего линии магнитного поля в направлении продольной оси тела 33b’ выбирается так, что (-ωLd+Vc) по существу равно 0. Здесь со является угловой скоростью вращения ротора 31’, Vc является напряжением, индуцированным в обмотках 111-1112 при вращении ротора. Как следует из уравнения (5), поскольку (-ωLd+Vc) выбрано по существу равным 0, то можно уменьшить входное напряжение V бесщеточного электродвигателя.
Кроме того, в железном сердечнике 33’ образован зазор 33с’. Зазор 33с’ расположен между постоянными магнитами 34 и боковой поверхностью 31а ротора. Зазор 33с’ проходит в направлении поперечной оси (оси q). Это приводит к уменьшению индуктивности Lq в направлении поперечной оси ротора 31’. Как следует из уравнения (5), уменьшение индуктивности Lq в направлении поперечной оси приводит к уменьшению входного напряжения V бесщеточного электродвигателя.
Таким образом, в бесщеточном электродвигателе согласно третьему варианту выполнения можно дополнительно уменьшить входное напряжение V бесщеточного электродвигателя.
В случае третьего варианта выполнения, аналогичного второму варианту выполнения, также желательно выбирать положения постоянных магнитов 34 и форму железного сердечника 33’ ротора так, чтобы выполнялось следующее уравнение:

Предпочтительно, чтобы бесщеточный электродвигатель согласно первому, второму или третьему варианту выполнения использовался для привода электромобиля. На фиг.15 показан электромобиль, содержащий бесщеточный электродвигатель согласно первому или второму варианту выполнения. В электромобиле установлен аккумулятор 51. Аккумулятор соединен с реле 52 высокого напряжения, которое передает напряжение в соответствующие блоки электромобиля. Усилитель 53 посылает напряжение в бесщеточный электродвигатель 50 в соответствии с перемещением акселераторной педали 54. Бесщеточный электродвигатель согласно первому, второму или третьему варианту выполнения расположен в качестве бесщеточного электродвигателя 50. Бесщеточный электродвигатель 50 приводит в движение приводные колеса 57 через трансмиссию 55 и приводные валы 56. В электромобиле, содержащем бесщеточный электродвигатель 50, признаки бесщеточного электродвигателя 50 обеспечивают снижение мощности усилителя 53.
Кроме того, бесщеточный электродвигатель согласно первому, второму или третьему варианту выполнения предпочтительно устанавливать в электропоезде. На фиг.16 показана конфигурация электропоезда, содержащего бесщеточный электродвигатель согласно одному их вариантов выполнения. На электропоезде установлен токоприемник 61. Токоприемник 61 находится в контакте с проводом 62, по которому передается напряжение питания. Затем он передает напряжение питания в усилитель 63. Усилитель 63 соединен с контроллером 64. В контроллере 64 установлен рычаг 64а управления. Усилитель 63 подает входное напряжение в бесщеточный электродвигатель 60 в соответствии с положением рычага 64а управления. Бесщеточный электродвигатель согласно первому, второму или третьему варианту выполнения установлен в качестве бесщеточного электродвигателя 60. Бесщеточный электродвигатель 60 приводит в движение приводные колеса 67 через трансмиссию 65 и приводные валы 66. В электропоезде, содержащем бесщеточный электродвигатель 60, признаки бесщеточного электродвигателя 60 обеспечивают снижение мощности усилителя 63.
Как указывалось выше, согласно данному изобретению можно увеличить выходной крутящий момент бесщеточного электродвигателя.
Согласно данному изобретению, можно подавлять пульсацию крутящего момента бесщеточного электродвигателя.
Согласно данному изобретению, можно уменьшить ток якоря бесщеточного электродвигателя.
Кроме того, согласно данному изобретению, можно уменьшить входное напряжение бесщеточного электродвигателя.
Дополнительно к этому, согласно данному изобретению, можно миниатюризировать бесщеточный электродвигатель.
| название | год | авторы | номер документа |
|---|---|---|---|
| Моментный вентильный электродвигатель | 1989 |
|
SU1734172A1 |
| БЕСЩЕТОЧНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ И СТЕКЛООЧИСТИТЕЛЬ | 2013 |
|
RU2587457C1 |
| ЭЛЕКТРОДВИГАТЕЛЬ | 2009 |
|
RU2454774C9 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2018 |
|
RU2716489C2 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ЯКОРЯ ДЛЯ ЭЛЕКТРОМАГНИТНОГО ПРЕОБРАЗОВАТЕЛЯ (ВАРИАНТЫ) | 1991 |
|
RU2111598C1 |
| МНОГОФАЗНЫЕ СТРУКТУРЫ ЗУБЧАТЫХ ПОЛЮСОВ ДЛЯ ЭЛЕКТРИЧЕСКОЙ МАШИНЫ | 2003 |
|
RU2330368C2 |
| УСТРОЙСТВО В ЭЛЕКТРИЧЕСКОЙ МАШИНЕ | 2007 |
|
RU2422968C2 |
| БЕСЩЕТОЧНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2000 |
|
RU2170487C1 |
| Вентильный электродвигатель с тахометрическим генератором | 1985 |
|
SU1419531A3 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2000 |
|
RU2234788C2 |

Изобретение относится к области электротехники и касается особенностей бесщеточных электродвигателей. Технический результат – повышение плотности энергии за счет эффективного использования реактивного момента. Сущность изобретения состоит в следующем. Бесщеточный электродвигатель содержит статор и ротор, имеющий боковую поверхность, противоположную статору. Статор содержит множество проходящих радиально железных сердечников и множество обмоток для создания магнитного поля в каждом железном сердечнике. Ротор содержит множество постоянных магнитов и индуцирующее магнитные силовые линии тело, расположенное между каждым постоянным магнитом и боковой поверхностью, при этом постоянные магниты имеют, по существу, форму прямоугольного параллелепипеда, а расстояние d между центром ротора и поверхностью постоянного магнита (магнитного полюса), противоположной указанной боковой поверхности ротора, среди поверхностей множества постоянных магнитов соответствует уравнению d≥r-D/10, где D=2πr/P при r - радиус ротора, Р - число постоянных магнитов. Предложены также электромобиль и электропоезд, содержащие бесщеточный электродвигатель описанной выше конструкции. 4 с. и 14 з.п. ф-лы, 16 ил.
d≥r-D/10,
где D=2πr/Р, при этом
r обозначает радиус указанного ротора;
Р - число указанных постоянных магнитов.
Т=р{φ Iа Cos(β)+(Lq-Ld)Ia2 Sin(2β)/2}
где р обозначает число пар полюсов (число полюсов/2);
φ - максимальное потокосцепление постоянного магнита с током якоря;
Iа - ток якоря;
β - фаза тока якоря;
Ld - продольная индуктивность (индуктивность в направлении продольной оси d);
Lq - поперечная индуктивность (индуктивность в направлении поперечной оси q);
при этом равенство Lq ≅ Ld не соблюдается.
12≤Р≤30.
указанные длинные стороны расположены противоположно указанной боковой поверхности.
0≤(Lq-Ld)/Ld ≤ 0,3,
где Lq обозначает индуктивность в направлении поперечной оси указанного ротора;
Ld - индуктивность в направлении продольной оси указанного ротора.
0≤(Lq-Ld)/Ld ≤ 0,3,
где Lq обозначает индуктивность в направлении поперечной оси указанного ротора;
Ld - индуктивность в направлении продольной оси указанного ротора.
мощный источник напряжения для подачи напряжения питания в указанный бесщеточный электродвигатель.
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| RU 94021358 А1, 27.08.1996 | |||
| ТРАНСПОРТНОЕ СРЕДСТВО С ЭЛЕКТРОТЯГОЙ | 1992 |
|
RU2022824C1 |
| RU 98107950 А1, 10.02.2000 | |||
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| US 6034458 А, 07.03.2000. | |||
