Область техники, к которой относится изобретение
Изобретение относится к машиностроению, в частности к области расположения и монтажа нескольких первичных двигателей транспортного средства, характеризующихся несколькими маховиками с гироскопическим эффектом, использующими электрические двигатель-генераторы.
Предшествующий уровень техники
Известно устройство для накопления энергии в маховике и для ее использования на транспортном средстве, разработанное фирмой «Эрликон» (патент Великобритании GB 1139936, кл. F16F 15/315, H02K 19/20, H02K 7/02, H02K 7/16 [1]), содержащее маховик в кожухе, на валу маховика с каждой его стороны закреплены электрические машины, кожух маховика опирается на сферическую опору, а прецессии кожуха противодействуют спиральные пружины.
Известно, что при изменении направления оси вращения маховика на маховик воздействует гироскопический (прецессионный) момент [2]

где:
ω - угловая скорость вращения маховика относительно оси его вала;
Ω - угловая скорость поворота оси маховика;
J - момент инерции маховика;
θ - угол между осью маховика и вектором угловой скорости поворота оси маховика Ω.
Гироскопический момент Mg воздействует на маховик таким образом, чтобы развернуть направление вектора угловой скорости ω направлении вектора угловой скорости Ω по кратчайшему расстоянию до совпадения этих векторов.
Определим гироскопический (прецессионный) момент, воздействующий на маховик, ось вращения которого направлена вдоль продольной оси транспортного средства, вращающийся с угловой скоростью ω, равной 6280 1/секунду и имеющий момент инерции J, равный 8 кг·м2, при повороте транспортного средства в горизонтальной плоскости по окружности радиусом R, равным 6 метров с линейной скоростью V, равной 10 м/с. В этом случае
θ=90°, Ω=v/R=10/6=1,66 1/c
и гироскопический момент
Mg=6280·1,66·8·1=83400 Н-м.
Этот гироскопический момент будет действовать в вертикальной плоскости и в зависимости от направления поворота транспортного средства и направления вращения маховика будет поднимать либо переднюю, либо заднюю часть транспортного средства, что может привести его к перевороту или потере управляемости.
При вертикальном расположении оси маховика гироскопический момент не препятствует повороту транспортного средства в горизонтальной плоскости. В то же время отклонение траектории движения транспортного средства от горизонтальной приводит к появлению гироскопического момента. Так, например, при попадании передней части транспортного средств в углубление на дороге появится угловая скорость поворота вокруг поперечной горизонтальной оси и возникнет гироскопический момент, стремящийся перевернуть транспортное средство вокруг продольной оси на бок.
К недостаткам известного устройства относится следующее.
В известном устройстве по патенту Великобритании GB 1139936 кожух маховика опирается на сферическую опору, что позволяет маховику поворачиваться в направлении гироскопического момента, а повороту кожуха противодействуют спиральные пружины. В то же время угол поворота кожуха маховика оказывается ограниченным и маховик после полного сжатия пружин перестает поворачиваться в направлении гироскопического момента и гироскопический момент начинает переворачивать транспортное средство. Компенсация гироскопического момента, воздействующего на транспортное средство, возможна за счет использования специальным образом расположенных двух маховиков, как это сделано в устройстве по Fig. 4 патента US 4282948 [3].
В устройстве по Fig. 4 патента US 4282948 поставленная цель достигается тем, что маховичный аккумулятор включает два маховика, каждый из которых снабжен приводом, маховики размещены на одной оси относительно их оси вращения и симметрично относительно оси перпендикулярной их оси вращения, маховики выполнены с одинаковым суммарным моментом инерции относительно их общей оси вращения, и вращение маховиков осуществляют с одинаковой частотой и с одинаковым направлением вращения при рассмотрении вращения маховиков из центральной точки устройства. С точки зрения оптимизации размещения маховиков маховичного аккумулятора на транспортном средстве может оказаться целесообразным использование в маховичном аккумуляторе не двух маховиков, а трех или четырех.
Известно использование трех маховиков со взаимно перпендикулярными осями вращения, установленных на общей платформе. Это устройство служит для стабилизации положения платформы в пространстве [4, стр. 77]. Примем, что в устройстве по [4, стр. 77] оси вращения маховиков направлены вдоль прямоугольных осей координат х, y и z. Тогда гироскопические моменты каждого из маховиков будут равны



где θx, θy и θz есть углы между осями х, y и z вектором Ω. Для определенности будем считать, что угол θx отложен в плоскости х, z, о, где о есть начало координатных осей х, y, z. Тогда  и
и  - θx и суммарный гироскопический момент, воздействующий на транспортное средство с тремя маховиками, будет
- θx и суммарный гироскопический момент, воздействующий на транспортное средство с тремя маховиками, будет

В общем случае для всех θx выражение (5) не равно нулю и при использовании устройства с тремя маховиками по [4, стр. 77] в качестве маховичного аккумулятора транспортного средства компенсация суммарного гироскопического момента, воздействующего на транспортное средство, не обеспечивается. Это свойство устройства с тремя маховикми по [4, стр. 77] является существенным его недостатком при его использовании в качестве маховичного аккумулятора транспортного средства.
Раскрытие изобретения
Целью настоящего изобретения является создание маховичного аккумулятор энергии с высоким уровнем использования накопленной энергии и с полной компенсацией гироскопического момента, вредно воздействующего на транспортное средство. В маховичных аккумуляторах энергии используются маховичные накопители энергии. Маховичные накопители энергии в заявляемых устройствах выполнены идентичной конструкции. Каждый из маховичных накопителей энергии включает кожух, подшипники и ротор маховичного накопителя энергии. Ротор маховичного накопителя энергии включает вал, на валу закреплены маховик и ротор электрической машины, ротор каждого маховичного накопителя энергии выполнен с одинаковым суммарным моментом инерции относительно его оси вращения, в кожухе закреплены статор электрической машины и подшипники.
Предлагаются два варианта исполнения маховичного аккумулятор энергии.
Во-первых, маховичный аккумулятор, предназначенный для применения на транспортном средстве, включающий три маховичных накопителя энергии идентичной конструкции, три маховичных накопителя энергии размещены на транспортном средстве в непосредственной близости друг от друга, отличающийся тем, что оси вращения ротора каждого маховичного накопителя энергии пересекаются в одной центральной точке и сдвинуты в пространстве на 120° и три маховичных накопителя энергии размещены одинаковым образом на одинаковом расстоянии от точки пересечения их осей.
Во-вторых, вариант маховичного аккумулятора энергии, предназначенный для применения на транспортном средстве, включающий четыре маховичных накопителя энергии идентичной конструкции, четыре маховичных накопителя энергии размещены на транспортном средстве в непосредственной близости друг от друга, отличающийся тем, что оси вращения ротора каждого маховичного накопителя энергии пересекаются в одной центральной точке, оси соседних маховичных накопителей энергии сдвинуты в пространстве на угол (arcsin (1/3)+90°)=109,47° относительно друг друга и четыре маховичных накопителя энергии размещены одинаковым образом на одинаковом расстоянии от точки пересечения их осей.
В предложенных вариантах исполнения маховичного аккумулятор энергии используется известный способ регулирования частоты вращения электрических машин маховичного аккумулятора, при котором вращение маховиков осуществляют с одинаковой частотой и с одинаковым направлением вращения при рассмотрении вращения маховиков из точки пересечения осей вращения маховиков.
Заявляемые варианты устройства отличаются тем, что при их работе обеспечивается полная компенсация гироскопического момента, вредно воздействующего на транспортное средство. Покажем, что в предлагаемых вариантах устройства обеспечивается компенсация гироскопического момента. Рассмотрим вариант исполнения устройства с тремя маховиками. Оси вращения маховиков АО, ВО и СО в предлагаемом устройстве будут лежать в одной плоскости и будут направлена под углом 120° относительно друг друга. Поскольку вращение маховиков осуществляют с одинаковым направлением вращения при рассмотрении вращения маховиков из точки пересечения осей вращения маховиков О, векторы угловых скоростей маховиков ωA, ωB, ωC будут направлены также под углом 120° относительно друг друга по осям АО, ВО и СО соответственно. Тогда в векторной форме гироскопические моменты маховиков устройства



где х есть знак векторного произведения и Ω, ωA, ωB и ωC есть векторы, a J есть скаляр. Суммарный гироскопический момент предлагаемого устройства с тремя маховиками будет равен

Поскольку векторы ωA, ωB, ωC направлены под углом 120° относительно друг друга и равны друг другу по модулю (частоты вращения маховиков одинаковые), выражение (ωA+ωB+ωC)=0 и гироскопический момент устройства MΣ=0. Действительно, для проекции суммы векторов ωA, ωB, ωC на ось А получим

Аналогичный результат получается и для проекций суммы векторов ωA, ωB, ωC на оси ВО и СО. Следовательно, гироскопический момент устройства с тремя маховиками MΣ=0. Рассмотрим вариант исполнения устройства с четырьмя маховиками. Оси вращения маховиков DO/, EO/, FO/ и GO/ в предлагаемом устройстве будут сдвинуты в пространстве на угол (arcsin (1/3)+90°)=109,47°. Поскольку вращение маховиков осуществляют с одинаковым направлением вращения при рассмотрении вращения маховиков из точки пересечения осей вращения маховиков О/, векторы угловых скоростей маховиков ωD, ωE, ωF, ωG будут направлены также под углом 109,47° относительно друг друга по осям DO/, EO/, FO/ и GO/ соответственно. Тогда в векторной форме гироскопические моменты маховиков устройства




Суммарный гироскопический момент предлагаемого устройства с четырьмя маховиками будет равен

Поскольку векторы ωD, ωE, ωF, ωG направлены под углом 109,47° относительно друг друга и равны друг другу по модулю (частоты вращения маховиков одинаковые), выражение (ωD+ωE+ωF+ωG)=0 и гироскопический момент устройства MΣ=0. Действительно, для суммы проекций векторов ωD, ωE, ωF, ωG на ось DO/ получим

Аналогичный результат получается и для проекций суммы векторов ωD, ωE, ωF, ωG на оси EO/, FO/, GO/. Следовательно, гироскопический момент устройства с четырьмя маховиками МΣ=0.
Краткое описание чертежей
Техническая возможность реализации предлагаемых устройств иллюстрируется Фиг. 1, Фиг. 2, Фиг. 3 и Фиг. 4.
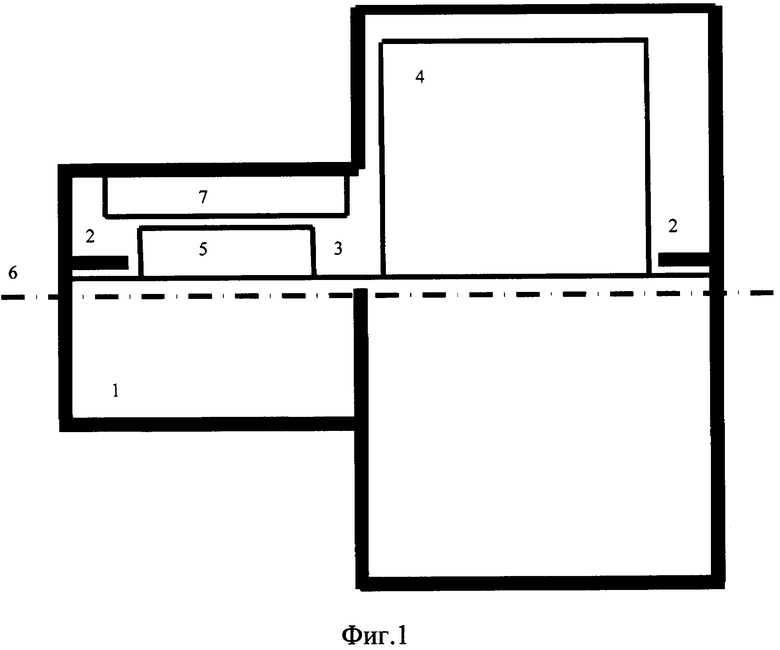
На Фиг. 1 изображен продольный разрез маховичного накопителя энергии. Маховичные накопители энергии в заявляемых устройствах по п. 1 и 2. Формулы изобретения выполнены идентичной конструкции. Каждый из маховичных накопителей энергии включает кожух 1, подшипники 2 и вал маховичного накопителя энергии 3. На валу маховичного накопителя энергии 3 закреплены маховик 4 и ротор электрической машины 5, все маховичные накопители энергии выполнены с одинаковым суммарным моментом инерции относительно оси вращения 6, в кожухе закреплены статор электрической машины 7 и подшипники 2.
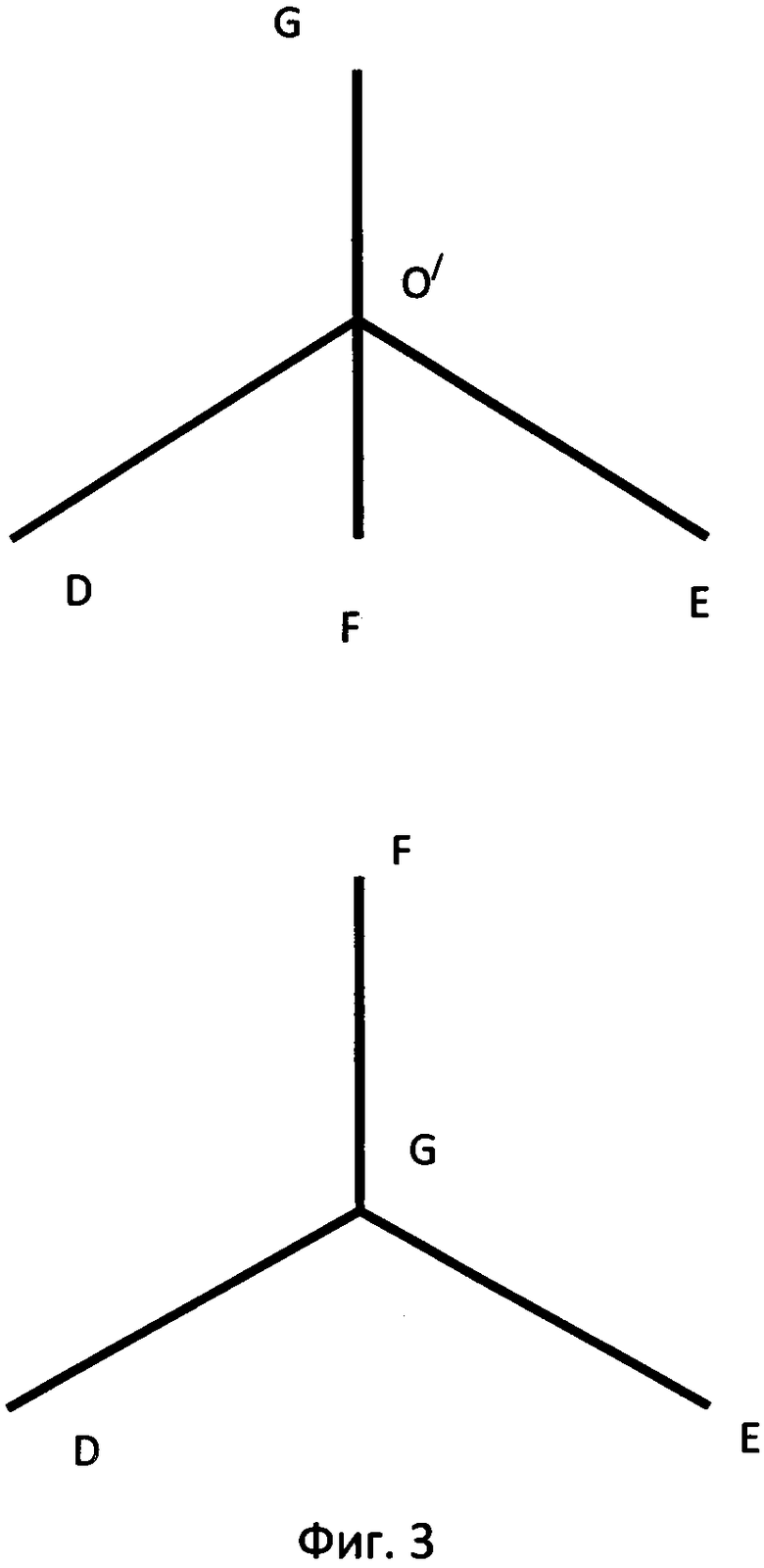
На Фиг. 2 изображена схема размещения маховичных накопителей энергии на транспортном средстве варианта исполнения маховичного аккумулятора по п. 1 формулы изобретения. В заявляемом устройстве по п. 1 три идентичных маховичных накопителя энергии 8 размещены на транспортном средстве в непосредственной близости друг от друга. При этом оси вращения А, В и С маховичных накопителей энергии каждого маховичного накопителя энергии находятся в одной плоскости, пересекаются в одной точке О и сдвинуты в пространстве на 120°.
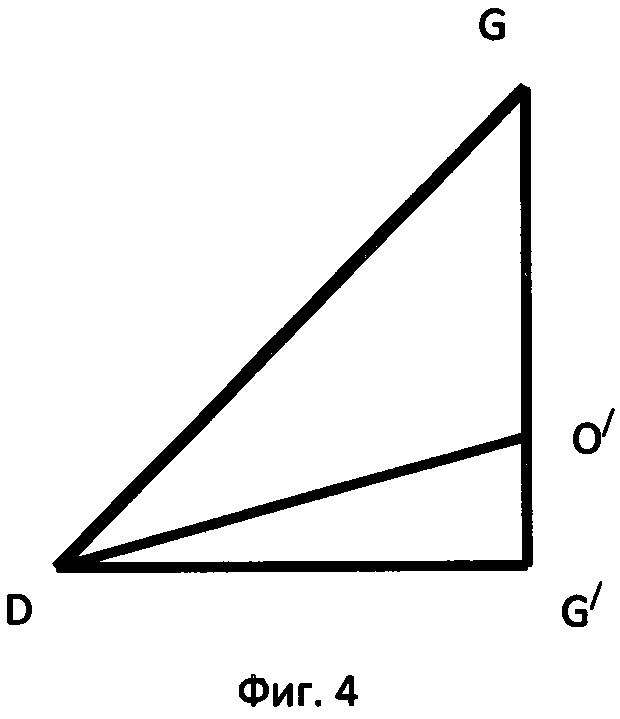
На Фиг. 3 изображены проекции "Главный вид" и "Вид сверху" на четыре оси вращения роторов маховичных накопителей энергии варианта исполнения маховичного аккумулятора по п. 2 формулы изобретения. Эти оси DO/, EO/, FO/ и GO/ пересекаются в одной точке О/. Оси соседних маховичных накопителей энергии DO/ и EO/, EO/ и FO/, FO/ и GO/, DO/ и GO/ сдвинуты в пространстве на угол (arcsin (1/3)+90°)=109,47° относительно друг друга.
На Фиг. 4 изображен прямоугольный треугольник, включающий сторону тетраэдра DG, оси DO/ и GG/, совпадающие с медианами тетраэдра DEFG, и точку пересечения медиан тетраэдра О/.
Пример осуществления изобретения
Каждый из маховичных накопителей энергии в соответствии с Фиг. 1 включает кожух 1, подшипники 2 и вал маховичного накопителя энергии 3. На валу маховичного накопителя энергии 3 закреплены маховик 4 и ротор электрической машины 5, все маховичные накопители энергии выполнены с одинаковым суммарным моментом инерции относительно оси вращения 6, в кожухе закреплены статор электрической машины 7 и подшипники 2. Маховик 4 на Фиг. 1 выполняется из титана или композитным из углеродного волокна [5]. Электрическая машин в составе ротора 5 и статора 7 на Фиг. 1 выполняется синхронной магнитоэлектрической [6].
При этом на роторе 5 размещаются постоянные магниты, статор 7 выполняется из шихтованной электротехнической стали с пазами, в пазах статоров укладывается многофазная, например трехфазная, обмотка. При выполнении устройства по п. 1 формулы изобретения используются три маховичных накопителя энергии идентичной конструкции, размещенные на транспортном средстве в непосредственной близости друг от друга таким образом, что оси вращения ротора каждого маховичного накопителя энергии АО, ВО и СО пересекаются в соответствии с Фиг. 2 в одной точке О, сдвинуты в пространстве на 120°, и три маховичных накопителя энергии размещены одинаковым образом, например, таким образом, что электрические машины в составе ротора 5 и статора 7 находятся на одинаковом и минимальном расстоянии от точки пересечения осей вращения их роторов. Поскольку векторы угловых скоростей маховиков ωA, ωB, ωC направлены под углом 120° относительно друг друга и равны друг другу по модулю (частоты вращения маховиков одинаковые), выражение (ωA+ωB+ωC)=0 и гироскопический момент устройства в соответствии с (10) будет равен нулю.
При выполнении устройства по п. 2 формулы изобретения используются четыре маховичных накопителя энергии идентичной конструкции, размещенные на транспортном средстве в непосредственной близости друг от друга таким образом, что оси вращения ротора каждого маховичного накопителя энергии DO/, ЕО/, FO/ и GO/ пересекаются в соответствии с Фиг. 3 в одной точке О/, сдвинуты в пространстве на 109,47° и три маховичных накопителя энергии размещены одинаковым образом например, таким образом, что электрические машины в составе ротора 5 и статора 7 находятся на одинаковом и минимальном расстоянии от точки пересечения осей вращения их роторов. Сдвиг между осями DO/, ЕО/, FO/ и GO/ на 109,47° обеспечивает одинаковый сдвиг этих осей в пространстве относительно друг друга. Действительно, при указанном сдвиге в 109,47° между пересекающимися в одной точке четырьмя осями эти оси совпадают с медианами равностороннего тетраэдра с углами в точках DEFG [7]. В равностороннем тетраэдре все медианы пересекаются в одной точке О/, делящей каждую из них в отношении 3:1 (считая от вершины) [7]. При этом угол между смежными медианами, например угол D O/G между медианами DD/ и GG/, будет равен 109,47°. Действительно (Фиг. 4), отрезок GO/=DO/ и эти отрезки относятся к отрезку O/G/ как 3:1. Тогда угол O/DG/=arcsin (1/3)=19,47° и угол D O/G будет равен 90°+19,47°=109,47°. Такие же углы будут и между другими медианами.
Поскольку вращение маховиков осуществляют с одинаковым направлением вращения при рассмотрении вращения маховиков из точки пересечения осей вращения маховиков О/, векторы угловых скоростей маховиков ωD, ωE, ωF, ωG будут направлены также под углом 109,47° относительно друг друга по осям DO/, EO/, FO/ и GO/ соответственно. Тогда в векторной форме гироскопические моменты маховиков устройства будут определяться в соответствии с выражениями (11-14) на стр. 5 описания изобретения. Суммарный гироскопический момент предлагаемого устройства с четырьмя маховиками будет определяться в соответствии с (15) описания изобретения. Поскольку векторы ωD, ωE, ωF, ωG направлены под углом 109,47° относительно друг друга и равны друг другу по модулю (частоты вращения маховиков одинаковые), выражение (ωD+ωE+ωF+ωG)=0 и в соответствии с (16) описания изобретения гироскопический момент устройств MΣ=0. Для использования предлагаемых устройств по п. 1 и 2 формулы изобретения в качестве маховичного аккумулятора транспортного средства предварительно присоединяют выводы обмоток статора электрических машин через полупроводниковые преобразователи частоты к источнику электрической энергии и приводят во вращение с одинаковой частотой и с одинаковым направлением вращения при рассмотрении вращения маховиков из точки пересечения осей вращения маховиков. При этом обеспечивают компенсацию гироскопического момента, вредно воздействующего на транспортное средство. При достижении маховиками устройства максимальной частоты вращения отключают от электрических машин источник электрической энергии и полупроводниковые преобразователи частоты. При движении транспортного средства электрические машины переводят в генераторный режим, накопленную в маховиках кинетическую энергию преобразуют в электрическую и передают в колесные электрические двигатели транспортного средства. Отбор энергии от маховиков выполняют таким образом, что поддерживают одинаковой частоту вращения всех маховиков устройства по п. 1 и всех маховиков устройства по п. 2 формулы изобретения. Этим обеспечивают условие равенства нулю суммарного гироскопического момента, воздействующего на устройство и отбор одинаковой мощности от всех маховиков устройства по п. 1 и всех маховиков устройства по п. 2 формулы изобретения.
Литература
1. Патент Великобритании GB 1139936, кл. F16F 15/315, H02K 19/20, H02K 7/02, H02K 7/16.
2. В.А. Алешкевич, Л.Г. Деденко, В.А. Караваев. Механика твердого тела. Лекции, Издательство Физического факультета МГУ, 1997 г.
3. Патент США US 4282948, кл. B60K 6/10.
4. Д.С. Пельпор. Гироскопические системы ориентации и стабилизации. Москва, Машиностроение, 1982 г.
5. И.А. Глебов, Э.Г. Кашарский, Ф.Г. Рутберг. Синхронные генераторы кратковременного и ударного действия, Ленинград, «Наука», 1985 г.
6. А.И. Бертинов, Д.А. Бут, С.Р. Мизюрин и др. Специальные электрические машины. Москва, «Энергоиздат», 1982 г.
7. Глейзер Г.И. История математики в школе. IX-X классы. Просвещение, 1983. - 351 с - С. 312.
Группа изобретений относится к электрическим транспортным средствам, характеризующимся заряжаемыми механическими аккумуляторами, например маховиками. Маховичный аккумулятор состоит из трех маховичных накопителей энергии идентичной конструкции. Маховичный накопитель состоит из кожуха, подшипников, вала, маховика и электрической машины. На валу закреплены маховик и ротор электической машины. Ротор каждого маховичного накопителя энергии выполнен с одинаковым суммарным моментом инерции относительно его оси вращения. В кожухе закреплены статор электрической машины и подшипники. Оси вращения ротора каждого маховичного накопителя пересекаются в одной точке и сдвинуты в пространстве на 120°, и накопители размещены на одинаковом расстоянии от точки пересечения их осей. По второму варианту маховичный аккумулятор состоит из четырех маховичных накопителей энергии. Оси вращения ротора каждого маховичного накопителя пересекаются в одной точке и сдвинуты в пространстве на угол (arcsin(1/3)+90°)=109,47° относительно друг друга, и накопители размещены на одинаковом расстоянии от точки пересечения их осей. Технический результат заключается в полной компенсации гироскопического момента, вредно воздействующего на транспортное средство, при использовании маховичного аккумулятора энергии. 2 н.п. ф-лы, 4 ил.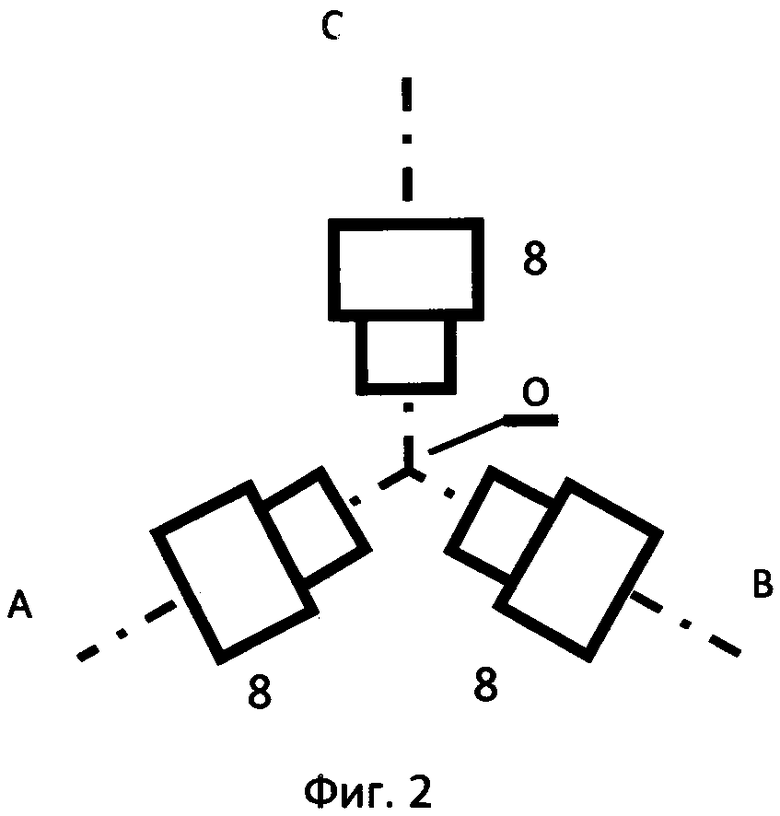
1. Маховичный аккумулятор, предназначенный для применения на транспортном средстве, включающий три маховичных накопителя энергии идентичной конструкции, размещенные на транспортном средстве в непосредственной близости друг от друга, каждый из маховичных накопителей энергии включает кожух, подшипники и вал, на валу закреплены маховик и ротор электрической машины, ротор каждого маховичного накопителя энергии выполнен с одинаковым суммарным моментом инерции относительно его оси вращения, в кожухе закреплены статор электрической машины и подшипники, отличающийся тем, что оси вращения ротора каждого маховичного накопителя энергии пересекаются в одной точке и сдвинуты в пространстве на 120° и три маховичных накопителя энергии размещены одинаковым образом на одинаковом расстоянии от точки пересечения их осей.
2. Маховичный аккумулятор, предназначенный для применения на транспортном средстве, включающий четыре маховичных накопителя энергии идентичной конструкции, размещенные на транспортном средстве в непосредственной близости относительно друг друга, каждый из маховичных накопителей энергии включает кожух, подшипники и вал, на валу закреплены маховик и ротор электрической машины, ротор каждого маховичного накопителя энергии выполнен с одинаковым суммарным моментом инерции относительно его оси вращения, в кожухе закреплены статор электрической машины и подшипники, отличающийся тем, что оси вращения ротора каждого маховичного накопителя энергии пересекаются в одной точке и сдвинуты в пространстве на угол (arcsin(1/3)+90°)=109,47° относительно друг друга и четыре маховичных накопителя энергии размещены одинаковым образом на одинаковом расстоянии от точки пересечения их осей.
| RU 2012151332 A, 10.06.2014 | |||
| Способ получения этаноламина | 1960 |
|
SU132639A1 |
| МАХОВИЧНЫЙ НАКОПИТЕЛЬ | 2001 |
|
RU2246034C1 |
| WO 1997032386 A1, 04.09.1997 | |||
| DE 102012112462 A1, 18.06.2014. | |||

