Область техники, к которой относится изобретение
Изобретение относится к машиностроению, в частности к области расположения и монтажа нескольких первичных двигателей транспортного средства, характеризующихся несколькими маховиками с гироскопическим эффектом, использующих электрические двигатель-генераторы, а также к способу управления частотой вращения электрических машин указанного устройства.
Предшествующий уровень техники
Известно устройство для накопления энергии в маховике и для ее использования на транспортном средстве, разработанное фирмой «Эрликон» (патент [1] Великобритании GB 1139936, кл. F16F 15/315, Н02К 19/20, Н02К 7/02, Н02К 7/16; стр.105 книги Н.В. Гулиа «Накопители энергии». Москва, «Наука», 1980 г. [2]), содержащее маховик в кожухе, на валу маховика с каждой его стороны закреплены электрические машины, кожух маховика опирается на сферическую опору, а прецессии кожуха противодействуют спиральные пружины.
Известно, что при изменении направления оси вращения маховика на маховик воздействует гироскопический (прецессионный) момент [3]

где ω - угловая скорость вращения маховика относительно оси его вала;
Ω - угловая скорость поворота оси маховика;
J - момент инерции маховика;
θ - угол между осью маховика и вектором угловой скорости поворота оси маховика Ω.
Гироскопический момент Mg воздействует на маховик таким образом, чтобы развернуть направление вектора угловой скорости ω в направлении вектора угловой скорости Ω по кратчайшему расстоянию до совпадения этих векторов. Определим гироскопический (прецессионный) момент, воздействующий на маховик, ось вращения которого направлена вдоль продольной оси транспортного средства, вращающийся с угловой скоростью Ω равной 6280 1/секунду и имеющий момент инерции J равный 8 кг*м2, при повороте транспортного средства в горизонтальной плоскости по окружности радиусом R равным 6 метров с линейной скоростью V равной 10 м/с. В этом случае
θ=90°, Ω=v/R=10/6=1,66 1/с
и гироскопический момент
Mg=6280*1,66*8*1=83400 Н*м.
Этот гироскопический момент будет действовать в вертикальной плоскости и в зависимости от направления поворота транспортного средства и направления вращения маховика будет поднимать либо переднюю, либо заднюю часть транспортного средства, что может привести к его перевороту или потере управляемости.
При вертикальном расположении оси маховика гироскопический момент не препятствует повороту транспортного средства в горизонтальной плоскости. В то же время отклонение траектории движения транспортного средства от горизонтальной оси приводит к появлению гироскопического момента. Так, например, при попадании передней части транспортного средства в углубление на дороге появится угловая скорость поворота вокруг поперечной горизонтальной оси и возникнет гироскопический момент, стремящийся перевернуть транспортное средство вокруг продольной оси на бок.
К недостаткам известного устройства относится следующее.
В известном устройстве по патенту Великобритании GB 1139936 кожух маховика опирается на сферическую опору, что позволяет маховику поворачиваться в направлении гироскопического момента, а повороту кожуха противодействуют спиральные пружины. В то же время угол поворота кожуха маховика оказывается ограниченным и маховик после полного сжатия пружин перестает поворачиваться в направлении гироскопического момента и гироскопический момент начинает переворачивать транспортное средство. Полная компенсация гироскопического момента, воздействующего на транспортное средство, возможна за счет использования специальным образом расположенных двух маховиков, как это сделано в устройстве по патенту US 4282948, стр.5 [4]. В устройстве по патенту US 4282948 поставленная цель достигается тем, что маховичный аккумулятор включает два маховика, каждый из которых снабжен приводом, маховики размещены коаксиально относительно их оси вращения и симметрично относительно оси, перпендикулярной их оси вращения, первый маховик выполнен с суммарным моментом инерции относительно их общей оси вращения J1, и второй маховик выполнен с суммарным моментом инерции относительно их общей оси вращения J2, и маховики вращаются встречно с угловыми скоростями ω1 и ω2 таким образом, что гироскопический момент первого маховика равен с обратным знаком гироскопическому моменту второго маховика. Для этого с помощью соответствующего регулирования частоты вращения маховиков должно выполняться условие

где f1 и f2 - частоты вращения первого и второго маховиков.
При выполнении условия (2) возникает неравенство между кинетическими энергиями маховиков W1=0,5 (2πf1)2J1 и W2=0,5 (2πf2)2J2. Мощность, отбираемая от первого маховика, будет равна 
Раскрытие изобретения
Целью настоящего изобретения является создание маховичного аккумулятор энергии с полной компенсацией гироскопического момента, вредно воздействующего на транспортное средство, и с высоким уровнем использования накопленной энергии. Полная компенсация гироскопического момента, воздействующего на транспортное средство, возможна за счет использования специальным образом расположенных двух маховиков, как это сделано в устройстве по патенту US 4282948, стр.5 [4]. В устройстве по патенту US 4282948 поставленная цель достигается тем, что маховичный аккумулятор включает два маховики, каждый из которых снабжен приводом, маховики размещены коаксиально относительно их оси вращения и симметрично относительно оси, перпендикулярной их оси вращения, первый маховик выполнен с суммарным моментом инерции J1 относительно их общей оси вращения, и второй маховик выполнен с суммарным моментом инерции J2 относительно их общей оси вращения, и маховики вращаются встречно с угловыми скоростями ω1 и ω2 таким образом, что гироскопический момент первого маховика равен с обратным знаком гироскопическому моменту второго маховика. Для этого с помощью соответствующего регулирования частоты вращения маховиков выполняется условие (2).
В предлагаемом устройстве поставленная цель достигается тем, что маховичный аккумулятор включает два маховика, размещенных коаксиально относительно их общей оси вращения и симметрично относительно оси, перпендикулярной их общей оси вращения, каждый из маховиков снабжен электрической машиной, причем ротор каждой электрической машины присоединен к своему маховику, а статор закреплен неподвижно, первый маховик и его ротор электрической машины выполнены с суммарным моментом инерции J1 относительно их общей оси вращения, равным суммарному моменту инерции второго маховика и ротора второй электрической машины J2 относительно их общей оси вращения, и тем, что используют способ регулирования частоты вращения электрических машин маховичного аккумулятора, при котором вращение маховиков осуществляют во встречном направлении таким образом, что частоту вращения первой электрической машины f1 и второй электрической машины f2 регулируют таким образом, что f1 равна f2.
Заявляемое устройство и способы управления частотой вращения первой и второй электрических машин этого устройства отличаются тем, что при работе этого устройства обеспечивается полная компенсация гироскопического момента, вредно воздействующего на транспортное средство, и обеспечивается одинаковая мощность, отбираемая от первого и второго маховиков. При этом использование энергии первого и второго маховиков будет одинаковым и общее использование энергии маховичного аккумулятора будет максимальным.
Краткое описание чертежей
Техническая возможность реализации предлагаемого устройства этого устройства иллюстрируется чертежом.
На чертеже изображена структурная схема механических элементов устройства. В заявляемом устройстве кожух 1 прикреплен к транспортному средству креплениями 22 и 23, к кожуху 1 прикреплена ось 11, первый маховик 2 с помощью подшипниковых щитов 3 и 6 прикреплен к размещенным на оси 11 подшипникам 13 и 14, к первому маховику 2 прикреплен ротор первой электрической машины 4, статор первой электрической машины 8 размещен коаксиально внутри ротора первой электрической машины 2 и с помощью щитов 9 и 10 прикреплен к оси 11, второй маховик 5 с помощью подшипниковых щитов 20 и 21 прикреплен к размещенным на оси 11 подшипникам 15 и 16, к второму маховику 5 прикреплен ротор второй электрической машины 7, статор второй электрической машины 19 размещен коаксиально внутри ротора второй электрической машины 7 и с помощью щитов 18 и 19 прикреплен к оси 11, при этом ось вращения 12 первого маховика 2 совпадает с осью вращения 12 второго маховика 5 и маховики 2 и 5 с их роторами электрических машин 4 и 7 размещены симметрично относительно оси 24, перпендикулярной оси вращения маховиков 12.
Пример осуществления изобретения
Кожух 1 (см. чертеж) выполняется из стали разъемным и герметичным. Для снижения потерь на трение маховиков о заполняющий кожух газ пространство внутри кожуха ваккуумируется либо заполняется легким газом, например водородом или гелием. Маховики 2 и 5 выполняются из титана или композитными из углеродного волокна [5]. Электрические машины в составе роторов 4 и 7 и статоров 8 и 19 выполняются синхронными магнитоэлектрическими [6]. При этом на роторах 4 и 7 размещаются постоянные магниты, статоры 8 и 19 выполняются из шихтованной электротехнической стали с пазами, в пазах статоров укладывается многофазная, например трехфазная, обмотка. За счет выбора геометрических размеров первый маховик 2 и его ротор электрической машины 4 выполняются с суммарным моментом инерции J1 относительно их общей оси вращения, равным суммарному моменту инерции J2 второго маховика 5 и его ротора второй электрической машины 7 относительно их общей оси вращения. Тогда условие равенства нулю суммарного гироскопического момента, действующего на устройство, упрощается и реализуется с помощью заявленного в п.2 Формулы изобретения способа управления частотой вращения первого и второго электрических двигатель-генераторов устройства, отличающегося тем, что частоту вращения первой электрической машины f1 и второй электрической f2 регулируют таким образом, что эти частоты поддерживают равными между собой, а вращение маховиков производят в противоположные стороны. Регулирование частоты вращения f1 первого маховика 2 и частоты вращения f2 второго маховика 5 может осуществляться с помощью автоматического регулятора частоты.
Выводы обмоток статора прокладываются по щитам 9, 10, 17 и 18 и выводятся из кожуха через отверстие в оси 11. Подшипники 13, 14, 15 и 16 выполняются как подшипники качения или подшипники с магнитным подвесом. Выводы обмоток статора присоединяются к полупроводниковым преобразователям частоты. Для использования предлагаемого устройства в качестве маховичного аккумулятора транспортного средства предварительно присоединяют выводы обмоток статора первой и второй электрических машин через полупроводниковые преобразователи частоты к источнику электрической энергии и приводят во вращение в противоположные стороны маховики 2 и 5 устройства таким образом, что частоту вращения f1 первого маховика 2 и частоту вращения f2 второго маховика 5 регулируют таким образом, что f1=f2. При этом обеспечивают полную компенсацию гироскопического момента, вредно воздействующего на транспортное средство. При достижении маховиками 2 и 5 устройства максимальной частоты вращения отключают от электрических машин источник электрической энергии и полупроводниковые преобразователи частоты. При движении транспортного средства электрические машины переводят в генераторный режим, накопленную в маховиках кинетическую энергию преобразуют в электрическую и передают в колесные электрические двигатели транспортного средства. Отбор энергии от маховиков выполняют таким образом, что регулируют частоту вращения f1 первого маховика 2 и частоту вращения f2 второго маховика 5 так, что f1=f2, чем обеспечивают условие равенства нулю суммарного гироскопического момента, воздействующего на устройство и отбор одинаковой мощности от первого маховика 2 и второго маховика 5. В устройстве по патенту US 4282948 полная компенсация гироскопического момента достигается за счет того, что при неравенстве моментов инерции первого J1 и второго J2 маховиков с помощью соответствующего регулирования частоты вращения маховиков выполняется условие (2). В этом случае изменение угловой частоты вращения при торможении более легкого маховика с меньшим моментом инерции будет происходить быстрее, чем изменение угловой частоты вращения при торможении более тяжелого маховика, и использование энергии более тяжелого маховика будет меньше, чем использование энергии более легкого маховика.
Оценим ухудшение использования энергии более тяжелого маховика на примере Фиг.5 устройства по патенту US 4282948.
Обозначим внешний радиус маховика 82 на Фиг.5 как R1. Примем R1=1,0 м. Из Фиг.6 устройства по патенту US 4282948 видно, что маховик 82 имеет кольцевую форму с радиальным размером r1=0,57 R1=0,57 м. Обозначим аксиальный размер маховика 82 как h. Из Фиг.6 устройства по патенту US 4282948 следует, что h=0,318 R1=0,318 м, внутренний маховик 80 имеет цилиндрическую форму с радиальным размером R2=0,568 R1=0,568 м и его аксиальный размер h=0,318 R1=0,318 м. С учетом того, что маховики являются полыми и заполнены жидкостью, по-видимому минеральным маслом, примем удельную массу маховика ρ=1000 кг/м2.
Масса первого маховика M1=ρπh [(R1)2-(r1)2]=674,4 кг.
Момент инерции первого маховика по [7] J1=0,5 M1[(R1)2+(r1)2]=446,7 кг*м2.
Масса второго маховика М2=ρπh (R2)2=322 кг.
Момент инерции второго маховика по [7] J2=0,5 M2(R2)2=52 кг*м2.
Примем максимальное значение угловой частоты вращения первого маховика 2πf1=100 1/с. Из (2) следует, что для компенсации гироскопического момента устройства угловая частота вращения второго маховика должна равняться 2πf2=2πf1 (J1/J2)=859 1/с. Энергоемкость первого маховика будет W1=0,5 J2(2πf1)2=2234 кДж и энергоемкость второго маховика будет W2=0,5 J2(2πf2)2=19196 кДж.
Поскольку при торможении маховиков должно выполняться равенство P1=Р2, если от первого маховика отобрать W1=2234 кДж, то и от второго маховика следует отобрать такую же энергию. При этом энергия второго маховика, равная W2-W1=16962 кДж, использована не будет.
В предлагаемом устройстве энергия первого и второго маховика используется с одинаковой скоростью и может быть использована практически полностью.
Литература
1. Патент Великобритании GB 1139936, кл. F16F 15/315, Н02К 19/20, Н02К 7/02, Н02К 7/16.
2. Н.В. Гулиа. Накопители энергии. Москва, «Наука», 1980 г., стр.105.
3. В.А. Алешкевич, Л.Г. Деденко, В.А. Караваев. Механика твердого тела. Лекции. Издательство Физического факультета МГУ, 1997 г.
4. Патент США US 4282948, кл. В60К 6/10.
5. И.А. Глебов, Э.Г. Кашарский, Ф.Г. Рутберг Синхронные генераторы кратковременного и ударного действия. Ленинград, «Наука», 1985 г.
6. А.И. Бертинов, Д.А. Бут. С.Р. Мизюрин и др. Специальные электрические машины. Москва, «Энергоиздат», 1982 г.
7. X. Кухлинг Справочник по физике. Москва, «Мир», 1985 г.
Изобретение относится к машиностроению, в частности к области первичных двигателей транспортного средства, характеризующихся несколькими маховиками с гироскопическим эффектом, а также к способу управления частотой вращения электрических машин указанного устройства. Маховичный аккумулятор включает два маховики, каждый из которых снабжен электрической машиной, маховики с электрическими машинами размещены коаксиально относительно их оси вращения и симметрично относительно оси, перпендикулярной их оси вращения, первый маховик и его ротор электрической машины выполнены с суммарным моментом инерции J1 относительно их общей оси вращения, равным суммарному моменту инерции J2 второго маховика и ротора второй электрической машины относительно их общей оси вращения. При зарядке маховичного аккумулятора с помощью электрических машин маховики приводят во вращение в противоположные стороны и частоту вращения первого маховика f1 и второго маховика f2 регулируют таким образом, что f1=f2. В процессе отбора энергии от маховиков и их торможения частоты вращения маховиков регулируют таким же образом. При этом обеспечивается полная компенсация гироскопического момента, вредно воздействующего на транспортное средство. В предлагаемом устройстве энергия первого и второго маховиков используется с одинаковой скоростью и может быть использована практически полностью. 2н.п. ф-лы,1 ил.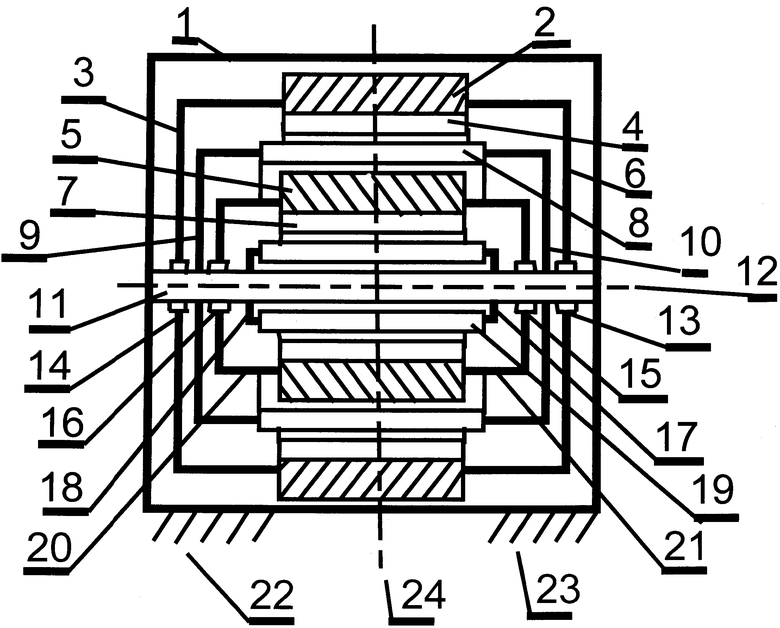
1. Маховичный аккумулятор, предназначенный для применения на транспортном средстве, включающий два маховика, размещенных коаксиально относительно их общей оси вращения и симметрично относительно оси, перпендикулярной их общей оси вращения, отличающийся тем, что каждый из маховиков снабжен электрической машиной, причем ротор каждой электрической машины присоединен к своему маховику, а статор закреплен неподвижно, первый маховик и его ротор электрической машины выполнены с суммарным моментом инерции J1 относительно их общей оси вращения, равным суммарному моменту инерции второго маховика и ротора второй электрической машины J2 относительно их общей оси вращения.
2. Способ регулирования частоты вращения электрических машин маховичного аккумулятора по п.1, при котором вращение маховиков осуществляют во встречном направлении, отличающийся тем, что частоту вращения первой электрической машины f1 и второй электрической машины f2 регулируют таким образом, что f1 равна f2.
| Устройство для прессования и упаковки табака в кипы | 1987 |
|
SU1493243A1 |
| US 4282948 A, (george A | |||
| Jerome ), 11.08.1981 | |||
| Локомотив с аккумулятором энергии в виде вращающегося маховика | 1986 |
|
SU1516389A1 |
| Скочинского), 23.10.1989 | |||
| ЭЛЕКТРОПРИВОД АВТОНОМНОГО ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2094250C1 |

