Настоящее изобретение относится к устройству детектирования спина для определения компонент преобладающего вектора спина в пучке частиц с преимущественной ориентацией спина частиц. Кроме того, изобретение относится к способу определения всех компонент преобладающего вектора спина в пучке частиц с преимущественной ориентацией спина частиц.
Устройства детектирования спина для определения компонент преобладающего вектора спина известны, например, из DE 102005045622 A1, DE 2646394 A1, DE 19842476 C1, EP 0490170 A2, US 4,760,254, US 2010/0155598 A1 и JP 61-283890.
В сравниваемых источниках DE 102005045622 A1, DE 19842476 C1 и DE 2646394 A1 описаны способ и устройства для определения компонент вектора поляризации спина пучка электронов, однако при этом не происходит определения всех трех компонент.
В EP 0490170 A2 описано устройство детектирования спина, в котором применена ферромагнитная мишень, имеющая определенное направление поляризации. Вектор поляризации измеряемого пучка электронов поворачивают при помощи вращателя с постоянной угловой скоростью. При помощи системного усилителя сигнал переменного тока на мишени измеряют, при этом подводимый к вращателю пилообразный сигнал находит применение в качестве опорного сигнала. Из разности фаз между пилообразным опорным сигналом и определенным сигналом переменного тока определяют угол между вектором поляризации пучка электронов, попадающего на мишень, и вектором намагничивания мишени. Чтобы при помощи этого способа определить все три компоненты вектора поляризации, применяют детектор с четырьмя мишенями.
В US 4,760,254 описаны прибор и способ измерения вектора поляризации спина пучка электронов, при помощи которых могут быть измерены все три компоненты вектора поляризации спина. Для этого прибор имеет сферический конденсатор, который на линии входящего пучка электронов имеет отверстие. В зависимости от того, заряжен конденсатор или нет, пучок электронов подводится к первой или ко второй мишени. В то время как одна мишень применяется для измерения компоненты X и компоненты Y, другая мишень применяется для измерения компоненты Y и компоненты Z.
В JP 61-283890 описано устройство, при помощи которого могут быть измерены все три компоненты вектора поляризации спина пучка электронов. Для этого пучок электронов последовательно проходит через две мишени, при этом между первой и второй мишенями пучок электронов отклоняется сферическим дефлектором.
Таким образом, для измерения всех трех компонент вектора поляризации спина по состоянию техники применяют несколько мишеней.
В US 2010/0155598 A1 также описан детектор спина электронов, при помощи которого могут быть определены все три компоненты вектора поляризации спина. Определение осуществляется при помощи магнитной пленки, которая обеспечивает возможность определения спина в одном определенном направлении. Чтобы определить все три компоненты вектора поляризации спина, в устройстве имеется два вращателя спина, при помощи которых любая произвольная компонента вектора поляризации спина может быть переведена в направление, обеспечивающее возможность определения.
Задачей настоящего изобретения является предоставить в распоряжение предпочтительное устройство детектирования спина, при помощи которого могут измеряться все компоненты преобладающего вектора спина в пучке частиц. Следующей задачей настоящего изобретения является предоставить в распоряжение альтернативный способ определения всех компонент вектора спина, преобладающего в пучке частиц.
Первая задача решена при помощи устройства детектирования спина по п.1, а вторая задача - при помощи способа по п.9 формулы изобретения. В зависимых пунктах формулы изобретения содержатся его предпочтительные варианты выполнения.
Предложенное в изобретении устройство детектирования спина для измерения компонент преобладающего вектора спина в пучке частиц с преимущественной ориентацией спина частиц включает в себя вращатель спина, подключенное после него отклоняющее устройство, которое отклоняет траекторию пучка частиц на угол отклонения, например электростатически, и подключенный после электростатического отклоняющего устройства детектор спина, который обеспечивает возможность определения компонент вектора спина, перпендикулярных к направлению движения пучка частиц. Вращатель спина включает в себя по меньшей мере одну переключаемую катушку, которая имеет осевое направление и ориентирована таким образом, что пучок частиц проходит через переключаемую катушку вдоль ее осевого направления. С переключаемой катушкой соединен коммутационный блок, который обеспечивает возможность переключения состояний возбуждения катушки и, таким образом, генерируемого катушкой магнитного поля. Кроме того, вращатель спина может дополнительно включать в себя электростатическую или магнитную линзу.
Посредством детектора, который может быть, например, детектором Мотта, в частности микродетектором Мотта, при помощи рассеяния частиц на мишени могут измеряться перпендикулярные к направлению движения пучка частиц при попадании на мишень компоненты вектора спина, преобладающего в пучке частиц. При помощи переключаемой катушки пространственная ориентация преобладающего в пучке частиц вектора спина может поворачиваться вокруг «старого» направления движения пучка частиц, перед тем как он пройдет через отклоняющее устройство. Такой поворот вокруг «старого» направления движения определяет, какие компоненты вектора спина, преобладающего в пучке частиц, после прохождения через отклоняющее устройство будут лежать в плоскости, перпендикулярной к «новому» направлению движения, то есть направлению движения при попадании на мишень детектора. Путем переключения катушки может быть произведено изменение тех компонент вектора, которые находятся в плоскости, перпендикулярной к «новому» направлению движения. Поэтому в зависимости от того, как включена катушка, детектором могут измеряться различные компоненты преобладающего в пучке частиц вектора спина. В общей сложности таким способом могут измеряться все компоненты преобладающего вектора спина.
Преимущество настоящего изобретения по сравнению с упомянутыми выше детекторами спина, известными по состоянию техники, состоит в том, что требуется лишь одна мишень.
При помощи предложенного в изобретении устройства детектирования спина может быть реализован предложенный в изобретении способ определения всех компонент вектора спина, преобладающего в пучке частиц. При этом способе при помощи детектора последовательно измеряют соответственно две компоненты преобладающего вектора спина, при этом посредством коммутационного блока при одном измерении катушка вращателя спина переведена в первое состояние возбуждения, а при другом измерении - во второе состояние возбуждения. Первое и второе состояния возбуждения катушки могут отличаться друг от друга силой тока и/или знаком тока, протекающего через катушку.
В первом примерном варианте в первом состоянии возбуждения через катушку может протекать ток с определенной силой, а во втором состоянии возбуждения - ток с такой же силой, как в первом состоянии возбуждения, но имеющий противоположный знак по сравнению с первым состоянием возбуждения. Преимущество этого варианта выполнения состоит в том, что вследствие переключения не оказывается влияния на оптические свойства вращателя спина в отношении частиц, так как на линзовое действие катушки оказывает влияние лишь сила тока, протекающего через катушку, а не его знак.
Во втором примерном варианте способа в первом состоянии возбуждения через катушку может протекать ток с определенной силой, большей нуля, а во втором состоянии возбуждения - ток с нулевой силой. Другими словами, в этом варианте во втором состоянии возбуждения через катушку ток не протекает. При этом коммутационный блок может просто выключаться, так как от него требуется лишь включение и выключение тока, протекающего через катушку.
Сила тока, протекающего через катушку, определяет плотность магнитного потока магнитного поля, генерируемого в катушке. Она, в свою очередь, определяет скорость, с которой вектор спина поворачивается вокруг «старого» направления движения. Поэтому сила тока, протекающего через катушку, определяет при заданной длине катушки угол, на который поворачивается преобладающий вектор спина вокруг «старого» направления движения. Путем установления силы тока и знака тока, протекающего через переключаемую катушку вращателя спина, посредством состояния возбуждения катушки могут устанавливаться сила и ориентация магнитного поля и, таким образом, угол, на который поворачивается вектор спина вокруг «старого» направления движения.
Если переключаемая катушка вращателя спина окружена магнитным ярмом, то при такой же силе тока могут генерироваться более сильные магнитные поля. При этом определенный поворот преобладающего вектора спина может быть произведен при помощи более короткой катушки по сравнению с катушкой без магнитного ярма. Альтернативно существует возможность производить определенный поворот преобладающего вектора спина при такой же длине катушки, как у катушки без магнитного ярма, с меньшей силой тока. Кроме того, посредством магнитного ярма уменьшаются поля рассеяния, так что влияние на преобразующие свойства вращателя спина вследствие переключаемого магнитного поля может минимизироваться.
Дальнейшие признаки, свойства и преимущества настоящего изобретения вытекают из последующего описания вариантов выполнения со ссылками на прилагаемые чертежи. На них изображено:
фиг.1 - схематическое изображение варианта выполнения устройства детектирования спина согласно изобретению,
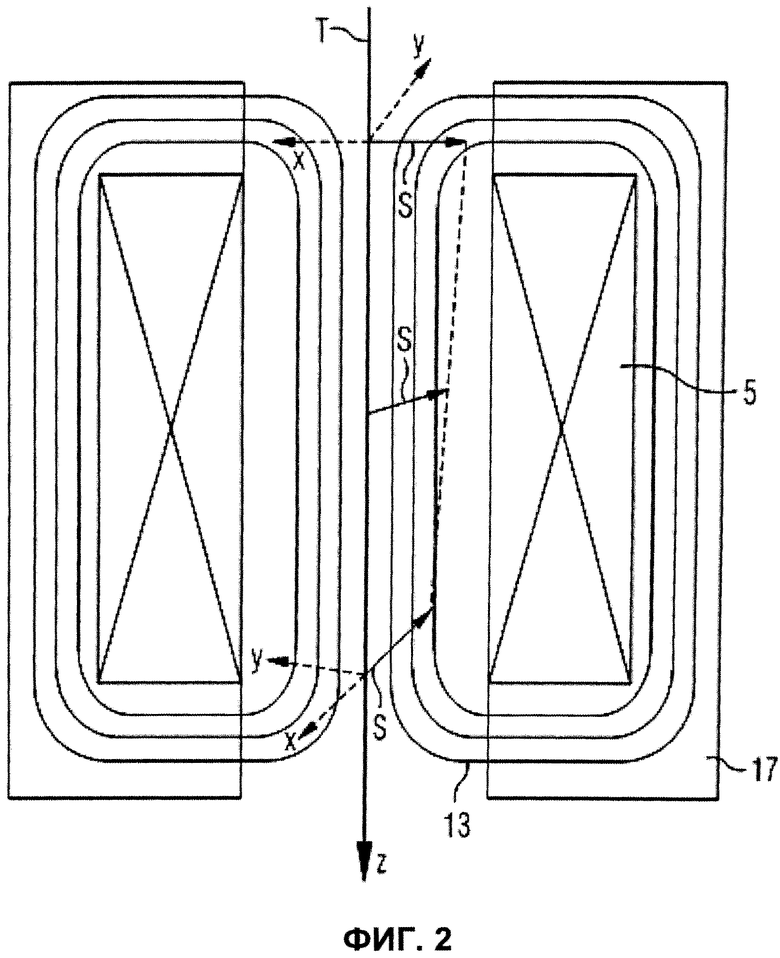
фиг.2 - поворот спина в магнитном поле,
фиг.3 - перспективное изображение в разрезе конкретного варианта выполнения устройства детектирования спина согласно изобретению.
Вариант выполнения устройства детектирования спина согласно изобретению описан ниже со ссылкой на фиг.1. В качестве существенных элементов это устройство включает в себя вращатель 1 спина, который в показанном варианте выполнения содержит электростатическую линзу 3 с переключаемой катушкой 5, подключенное после вращателя спина отклоняющее устройство 7, работающее в настоящем варианте выполнения исключительно электростатически, и подключенный после электростатического отклоняющего устройства детектор 9 спина, который в настоящем варианте выполнен в виде микродетектора Мотта. Кроме того, устройство детектирования спина согласно изобретению может включать в себя, как в показанном варианте выполнения, дополнительные электростатические или магнитные элементы 11. Ими могут быть, например, дополнительные электростатические линзы, дрейфовые трубки или конденсаторы, при помощи которых может оказываться влияние на траекторию пучка, состоящего из заряженных частиц, проходящего через устройство детектирования спина. Как уже было описано, в настоящем варианте выполнения вращатель 1 спина включает в себя электростатическую линзу. Однако наличие электростатической линзы не является условием функционирования вращателя спина. В простейшем варианте вращатель спина может включать в себя лишь катушку 5, при помощи магнитного поля которой производится поворот спина. Если в дополнение к катушке 5 вращатель спина включает в себя дополнительные элементы, то вместо электростатической линзы 3 или в дополнение к ней могут быть также предусмотрены другие электростатические и/или магнитные элементы, например магнитные линзы, дрейфовые трубки и т.д.
Пучок T частиц поступает через входное отверстие 13 в устройство детектирования спина и последовательно проходит через вращатель 1 спина и электростатический отклоняющий элемент 7, чтобы в конечном итоге поступить в микродетектор 9 Мотта. Пучок T содержит частицы, обладающие спином, при этом ориентация спина частиц, содержащихся в пучке, имеет преобладающее направление. Это преобладающее направление отображается вектором спина, который в свою очередь определен тремя своими компонентами. Однако это не означает, что все частицы пучка T частиц имеют спин, который ориентирован в соответствии с преобладающим направлением. Напротив, имеет место распределение ориентации спина отдельных частиц, причем это распределение имеет максимум при ориентации спина, которая соответствует преобладающему направлению. Острота максимума, то есть его высота по отношению к его ширине, зависит от степени поляризации в пучке частиц, который в свою очередь зависит от процесса, вызывающего поляризацию.
В микродетекторе 9 Мотта при помощи плоской мишени, на которой происходит рассеяние, зависящее от направления поляризации частиц в плоскости мишени, и плоскость которой проходит перпендикулярно к базовому направлению пучка частиц, определяют те компоненты вектора спина, преобладающего в пучке Y частиц, которые ориентированы перпендикулярно к направлению движения пучка T частиц. Если, например, на фиг.1 направление, в котором пучок T частиц входит в устройство детектирования спина через входное отверстие 13, определено в системе координат, связанной со спином частиц в пучке, как направление Z, то перпендикулярными к нему направлениями являются направление X и направление Y. В показанном варианте выполнения направление пучка частиц отклоняется при помощи электростатического отклоняющего элемента 7 на 90°, без изменения ориентации спина в пучке. Поэтому в настоящем варианте выполнения направление движения пучка после прохождения через отклоняющий элемент 7 ориентировано навстречу направлению X, как это показано при помощи осей координат, обозначенных буквой A. При этом в микродетекторе 9 Мотта определяют компоненту Y и компоненту Z вектора спина, отображающего преобладающую ориентацию спина, пока вращатель 1 спина не поворачивает спин частиц пучка. Пока вращатель 1 спина не поворачивает спин, на преобладающее направление спина в пучке частиц и, таким образом, на ориентацию связанной с ним системы координат влияния не оказывается.
Наряду с имеющейся в настоящем варианте выполнения электростатической линзой 3 вращатель 1 спина имеет также переключаемую катушку 5, которая ориентирована по отношению к направлению движения пучка T частиц таким образом, что пучок частиц проходит через катушку в ее осевом направлении, то есть в настоящем варианте выполнения осевое направление катушки проходит в направлении Z системы координат, связанной с вектором спина пучка частиц. Для переключения катушки 5 устройство детектирования спина имеет коммутационный блок 15, который соединен с катушкой 5 вращателя спина. Если в настоящем варианте выполнения катушка 5 включена, протекание тока через катушку 5 генерирует внутри нее магнитное поле. Катушка 5 вместе с силовыми линиями плотности B магнитного потока показана на фиг.2. Кроме того, на фиг.2 показаны направление Z движения пучка T частиц, проходящего через катушку 5, и проходящая перпендикулярно к направлению Z движения компонента S вектора спина. В магнитном поле, силовые линии которого в настоящем варианте выполнения проходят внутри катушки 5 параллельно направлению Z движения пучка частиц, компонента S вектора спина претерпевает прецессию, то есть поворот вокруг направления Z движения пучка T частиц. Угол, на который поворачивается компонента S вектора спина, зависит от силы магнитного поля, а также от пути, пройденного через магнитное поле. Чем сильнее магнитное поле при заданном пути, тем быстрее поворачивается спин, и тем больше угол поворота после прохождения через магнитное поле.
В настоящем варианте выполнения магнитное поле внутри катушки 5 представляет собой однородное магнитное поле. Однако наличие однородного магнитного поля внутри катушки 5 не является условием функционирования вращателя спина. Вращение спина может производиться не только при помощи однородного, но и при помощи неоднородного магнитного поля. При применении неоднородного магнитного поля катушка может также выполнять оптические функции в отношении пучка частиц, например, в качестве магнитной линзы производить фокусирование или расфокусирование пучка частиц.
В настоящем варианте выполнения путь прохождения пучка T частиц через магнитное поле и сила магнитного поля согласованы друг с другом таким образом, что компонента S вектора спина после прохождения через магнитное поле поворачивается вокруг направления движения на 90°. В связанной с вектором спина системе координат это означает, что система координат поворачивается на 90° вокруг оси Z. Таким образом, если вектор спина в системе A координат имеет определенную ориентацию, то после прохождения через вращатель спина с включенным магнитным полем они имеет эту ориентацию в системе B координат. Другими словами, вектор спина все еще представляется теми же самыми значениями координат X, Y и Z, однако связанная с ним система координат повернута на 90° вокруг оси Z. Так как в настоящем варианте выполнения после прохождения через магнитное поле вращателя 1 спина осуществляется лишь электростатическое отклонение, то на ориентацию вектора спина влияния не оказывается, и направление движения пучка T частиц после прохождения через электростатический отклоняющий элемент 7 соответствует направлению Y системы координат, связанной с вектором спина. Поэтому в микродетекторе 9 Мотта измеряют компоненту X и компоненту Z вектора спина. Отсутствие влияния на ориентацию вектора спина упрощает, в частности, реализацию настоящего изобретения, однако не является необходимостью для его функционирования. Изобретение выполнимо также при магнитном отклонении, влияющем на ориентацию, или другом влиянии на пучок частиц после прохождения через вращатель 1 спина, если только при таком магнитном влиянии спин не поворачивается вокруг первоначального направления движения настолько, что сообщенный вращателем 1 спина поворот снова полностью компенсируется. Однако предпочтительно, если после прохождения через вращатель 1 спина на пучок частиц уже не оказывается магнитное влияние, которое могло бы повернуть спин вокруг первоначального направления движения (направление Z на фиг.1). В противоположность этому поворот спина вокруг «нового» направления движения пучка частиц после прохождения через отклоняющее устройство 7 (направление X при выключенной катушке, как это показано в системе A координат, и направление Y при включенной катушке, как это показано в системе B координат) является, как правило, некритичным, так как он оставляет компоненты вектора спина, лежащие в плоскости, перпендикулярной к направлению движения, в этой же плоскости. Однако, в частности, предпочтительно, если на пути к детектору 9 происходит лишь электростатическое влияние на пучок частиц, чтобы иметь возможность надежным образом исключить нежелательные влияния магнитных полей на ориентацию спина.
Таким образом, при помощи представленного варианта выполнения устройства детектирования спина могут быть определены все три компоненты преобладающего вектора спина в пучке T частиц, посредством того, что в соответствии с вариантом выполнения вначале измеряют компоненту Y и компоненту Z вектора спина при выключенной катушке 5 вращателя 1 спина. Затем при помощи коммутационного блока 15 включают магнитное поле катушки 5, так что при этом измеряют компоненту X и компоненту Z вектора спина.
В настоящем варианте выполнения катушка 5 окружена магнитным ярмом 17. Это уменьшает поля рассеяния, которые могли бы оказывать отрицательное влияние на оптические свойства вращателя спина в отношении частиц. Кроме того, это приводит к повышенной плотности магнитного поля внутри катушки, так что заданное значение плотности магнитного потока внутри катушки может быть достигнуто при меньшей силе тока, протекающего через катушку 5.
Пучком частиц может быть, в частности, пучок электронов. Однако при помощи описанного устройства детектирования спина могут быть определены все три компоненты преобладающего направления ориентации спина в пучках частиц, которые состоят из других электрически заряженных частиц, в частности, преобладающего направления ориентации спина в пучках ионов.
Ниже со ссылкой на фиг.3 описан конкретный вариант выполнения устройства детектирования спина.
Показанный на чертеже прибор измеряет спин электрона, например, на выходе полусферического фотоэлектронного спектрометра. Электрон входит в детектор через входное отверстие (entrance hole 13), имея поляризацию спина («Spin») с компонентами в направлениях X, Y, Z. Электростатическая линзовая система, включая отклоняющий на 90° элемент 7, проводит электрон в микродетектор 9 Мотта. Там измеряют две из трех компонент вектора спина.
Линзовый элемент 1, служащий в качестве линзы, поворачивающей спин, функционирует либо исключительно электростатически («without rotator»), либо может быть приложено дополнительное определенное магнитное поле («with rotator»). При помощи этого дополнительного магнитного поля спин электрона поворачивается вокруг оси Z на 90°.
Если магнитное поле во вращателе 1 спина выключено («without rotator»), то микродетектор Мотта может определять компоненты Y и Z спина.
Если магнитное поле во вращателе 1 спина включено («with rotator»), то микродетектор Мотта может определять компоненты X и Z спина.
Таким образом, посредством включения и включения вращателя спина можно последовательно определить все три компоненты спина электрона. Без вращателя 1 спина можно определить лишь компоненты Y и Z.
Все устройство детектирования спина расположено в вакуумной камере. Микродетектор Мотта имеет плоскую рассеивающую мишень и четыре канальных электронных умножителя. Вращатель 1 спина обеспечивает возможность быстрого переключения между компонентами вектора спина, которые измеряются при помощи микродетектора 9 Мотта. Устройство детектирования спина измеряет спин частиц, в частности, спин электронов, точно в одной точке в пространстве E(k). Таким образом, не происходит перемещения энергии при определении различных компонент спина.
С целью наглядности настоящее изобретение было описано при помощи конкретных вариантов выполнения. Однако специалисту понятно, что возможны отклонения от этих вариантов выполнения. Например, состояния включения катушки 5 в вариантах выполнения выбраны таким образом, что в одном состоянии включения она генерирует магнитное поле, которое производит поворот спина на 90°, а в другом состоянии включения она магнитное поле не генерирует. Однако альтернативно возможно также, например, выбрать состояния включения таким образом, что в одном состоянии включения генерируется магнитное поле, которое производит поворот спина на 45°, а в другом состоянии включения генерируется магнитное поле, которое производит поворот Спина на - 45°. Преимущество этого варианта выполнения состоит в том, что линзовое действие, на которое оказывает влияние только сила тока, протекающего через катушку, а не его знак, в обоих состояниях включения является одинаковым. В общей сложности при обоих состояниях включения происходит поворот спина на различные углы (то есть примерно на 0° в одном состоянии включения и на 90° в другом состоянии включения, или же на 45° в одном состоянии включения и на - 45° в другом состоянии включения). При этом необязательно необходимо, чтобы разность между обоими углами поворота составляла 90°. Однако разность углов в размере 90° дает преимущество, состоящее в том, что определение трех компонент является при этом наиболее простым. Равным образом не требуется, чтобы отклоняющий элемент 7 отклонял пучок частиц непременно на 90°, и меньшее отклонение также является достаточным. Однако угол в размере 90° здесь также дает преимущество, состоящее в том, что определение трех компонент является при этом наиболее простым.
Список обозначений
| название | год | авторы | номер документа |
|---|---|---|---|
| Спин-детектор свободных электронов на основе полупроводниковых гетероструктур | 2016 |
|
RU2625538C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ЗАПОМИНАНИЯ ДАННЫХ С ИСПОЛЬЗОВАНИЕМ СПИН-ПОЛЯРИЗОВАННЫХ ЭЛЕКТРОНОВ | 1995 |
|
RU2153706C2 |
| УСТРОЙСТВО ДЛЯ АДИАБАТИЧЕСКОГО РАДИОЧАСТОТНОГО ПЕРЕВОРОТА СПИНА ПОЛЯРИЗОВАННЫХ НЕЙТРОНОВ | 2005 |
|
RU2294572C2 |
| СВЕРХПРОВОДЯЩИЙ НЕЙТРОННЫЙ СПИН-ФЛИППЕР | 1988 |
|
SU1519385A1 |
| СПОСОБ ИЗМЕРЕНИЯ ЭНЕРГЕТИЧЕСКИХ СПЕКТРОВ ПОЛЯРИЗОВАННЫХ МЕДЛЕННЫХ НЕЙТРОНОВ | 2012 |
|
RU2521080C1 |
| СПОСОБ ИЗМЕРЕНИЯ НАПРАВЛЕНИЯ МАГНИТНОГО ПОЛЯ В ВАКУУМНЫХ УСТАНОВКАХ | 2004 |
|
RU2271550C2 |
| ПРЕЦИЗИОННЫЙ ТВЕРДОТЕЛЬНЫЙ КВАНТОВЫЙ ГИРОСКОП НЕПРЕРЫВНОГО ДЕЙСТВИЯ НА БАЗЕ СПИНОВОГО АНСАМБЛЯ В АЛМАЗЕ | 2017 |
|
RU2684669C1 |
| СИСТЕМЫ И СПОСОБЫ ДЛЯ КОМПЕНСАЦИИ ДВИЖЕНИЯ В УЛЬТРАЗВУКОВОМ МОНИТОРИНГЕ ДЫХАНИЯ | 2019 |
|
RU2797191C2 |
| ТВЕРДОТЕЛЬНЫЙ КВАНТОВЫЙ МАГНИТОМЕТР | 2024 |
|
RU2837487C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ИОНОСФЕРЫ ЗЕМЛИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2177161C1 |

Изобретение относится к области экспериментальной физики и предназначено для определения компонент вектора спина, преобладающего в пучке частиц. Предложенное устройство детектирования спина состоит из вращателя (1) спина с переключаемой катушкой (5), отклоняющего устройства (7), детектора (9) спина и коммутационного блока (15), обеспечивающего возможность переключения состояний возбуждения катушки (5). Исследуемый пучок частиц проходит через вращатель спина (1) с переключаемой катушкой(5). Далее пучок отклоняется на угол отклонения отклоняющим устройством (7), после чего попадает на детектор (9), измеряющий две компоненты вектора спина, перпендикулярные к направлению движения пучка. Меняя силу и/или знак тока в катушке (5) и осуществляя тем самым поворот спина частиц на разные углы, измеряют все три компоненты вектора спина. Техническим результатом изобретения является возможность определения трех компонент вектора спина. 2 н. и 10 з.п. ф-лы, 3 ил.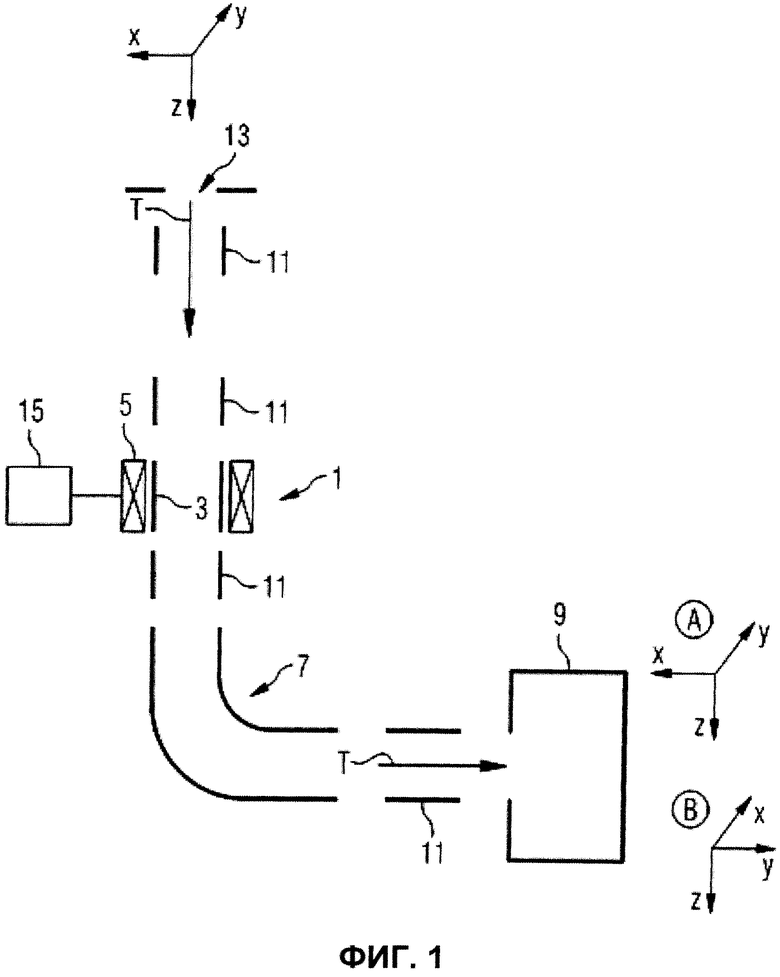
1. Устройство детектирования спина для определения компонент вектора спина, преобладающего в пучке (T) частиц с преимущественной ориентацией спина частиц, при этом устройство детектирования спина включает в себя:
- вращатель (1) спина с переключаемой катушкой (5), которая имеет осевое направление и ориентирована таким образом, что пучок (T) частиц проходит через переключаемую катушку (5) вдоль ее осевого направления;
- отклоняющее устройство (7), подключенное после вращателя (1) спина и электростатически отклоняющее траекторию пучка (Т) частиц на угол отклонения;
- детектор (9) спина, подключенный после отклоняющего устройства (7) и обеспечивающий возможность определенияперпендикулярных к направлению движения пучка (T) частиц компонент вектора спина, преобладающего в пучке (T) частиц, и
- соединенный с переключаемой катушкой (5) коммутационный блок (15), который обеспечивает возможность переключения состояния возбуждения катушки (5).
2. Устройство детектирования спина по п.1, в котором вращатель (1) спина включает в себя электростатическую линзу (3), которая окружена переключаемой катушкой (5).
3. Устройство детектирования спина по п.1, в котором подключенным после вращателя (1) спина отклоняющим устройством (7) является отклоняющее устройство, производящее электростатическое отклонение.
4. Устройство детектирования спина по п.1, в котором подключенное после вращателя (1) спина отклоняющее устройство (7) электростатически отклоняет траекторию пучка (T) частиц на 90°.
5. Устройство детектирования спина по п.1, в котором при помощи коммутационного блока (15) реализована возможность установления силы тока и/или знака тока, протекающего через переключаемую катушку (5).
6. Устройство детектирования спина по п.1, в котором переключаемая катушка (5) вращателя (1) спина окружена магнитным ярмом (17).
7. Устройство детектирования спина по п.1, в котором детектором (9) является детектор, которым одновременно определяются две перпендикулярные друг к другу компоненты вектора
8. Устройство детектирования спина по п.6, в котором детектором (9) является детектор Мотта.
9. Способ определения всех компонент вектора спина, преобладающего в пучке (T) частиц, с применением устройства детектирования спина по одному из пп.1-8, при котором с помощью детектора (9) последовательно измеряют соответственно две компоненты преобладающего вектора спина,
при этом с помощью коммутационного блока (15) при одном измерении катушку (5) вращателя (1) спина переводят в первое состояние возбуждения, а при другом измерении - во второе состояние возбуждения.
10. Способ по п.9, при котором первое и второе состояния возбуждения катушки отличаются силой тока и/или знаком тока, протекающего через катушку.
11. Способ по п.10, при котором через катушку (5) в первом состоянии возбуждения протекает ток с определенной силой, а во втором состоянии возбуждения через нее протекает ток с такой же силой, как и в первом состоянии возбуждения, но с противоположным по сравнению с первым состоянием возбуждения знаком.
12. Способ по п.10, при котором через катушку (5) в первом состоянии возбуждения протекает ток с определенной силой, большей нуля, а во втором состоянии возбуждения ток через нее не протекает.
| JP 10020044 A 23.01.1998 | |||
| JP 3185339 A 13.08.1991 | |||
| JP 61283890 A 13.12.1986 | |||
| JP 60017846 A 29.01.1985 | |||
| СПОСОБ ПОЛУЧЕНИЯ ОЛИГОЛ1ЁРНЫХ ПОЛИЭФИРОВ | 0 |
|
SU204584A1 |

