Изобретение относится к области геофизики и космической физики и может быть использовано для измерения электрических полей в ионосфере Земли с помощью научной аппаратуры, установленной на борту космического аппарата (КА). Особенно целесообразно использование изобретения для определения с высокой точностью, в реальном масштабе времени напряженности электрического поля в ионосфере Земли с целью оперативного прогнозирования землетрясений, цунами и других катаклизмов естественного и искусственного происхождения.
Одной из важнейших задач экологического мониторинга является прогнозирование районов и сроков возникновения природных катастрофических явлений и, прежде всего, землетрясений, тайфунов и цунами. Результаты исследований космического пространства показывают, что в районах землетрясений за несколько часов до их начала регистрируются возмущения квазипостоянных и переменных (до 20 кГц) электрических и магнитных полей. В частности, в ряде работ [1-4] в качестве предвестников землетрясений классифицировались следующие регистрируемые явления:
- эффект повышения интенсивности волновых излучений в КНЧ/ОНЧ диапазонах (0,1-15 кГц) в магнитных силовых трубках, опирающихся на эпицентральную область надвигающегося землетрясения [1-2];
- генерация квазипостоянных электрических полей и магнитных пульсаций на частотах порядка 1 кГц в ионосфере над очагом землетрясений и в магнитосопряженном районе [3];
- возбуждение пульсаций магнитного поля с частотами более 8 Гц в магнитных силовых трубках, соответствующих эпицентральным областям, за 1,5-4 часа до начала землетрясений [4] и др.
Данные измерения относятся к диапазону ультранизких частот (УНЧ), представляющему особый интерес, ввиду достаточно низкого уровня помех, и возможности использования для предсказания землетрясений, цунами и тайфунов [5]. В этом диапазоне (1-10 Гц) потоки энергии излучения в ионосфере (Н~500 км) имеют спектральный максимум, зависящий от глубины залегания источника тока (предвестника землетрясений) и параметров среды [6]. При горизонтальном размере источника ~ 20 км характерный размер зоны засветки в ионосфере оценивается величиной ~100 км.
Известен способ [7] измерения напряженности переменного электрического поля, основанный на помещении в область поля металлической пластины - чувствительного элемента, в результате чего происходит поляризация пластины, причем плотность положительных и отрицательных зарядов, наведенных на противоположных поверхностях пластины, оказывается пропорциональной величине напряженности электрического поля, и измеренная величина тока, протекающего между поверхностями пластины, является мерой напряженности измеряемого переменного электрического поля, при этом измеряемая величина тока изменяется с частотой изменения электрического поля. Данный способ реализован в устройстве [7], которое неоднократно использовалось на КА, в частности, три датчика "Зонд-Заряд" успешно функционируют в составе орбитальной станции ОС "МИР" с 1987 (1989) гг. [8,9].
В развитии данного способа и устройства, реализующего его, имеет место способ измерения напряженности постоянного электрического поля и устройство, реализующее его, отличающееся от предыдущих тем, что вышеупомянутая пластина помещается в электростатический металлический экран, при этом пластине с выбранной частотой сообщаются механические колебания, так чтобы в процессе колебаний пластина в фазе  находилась в экране, а в фазе
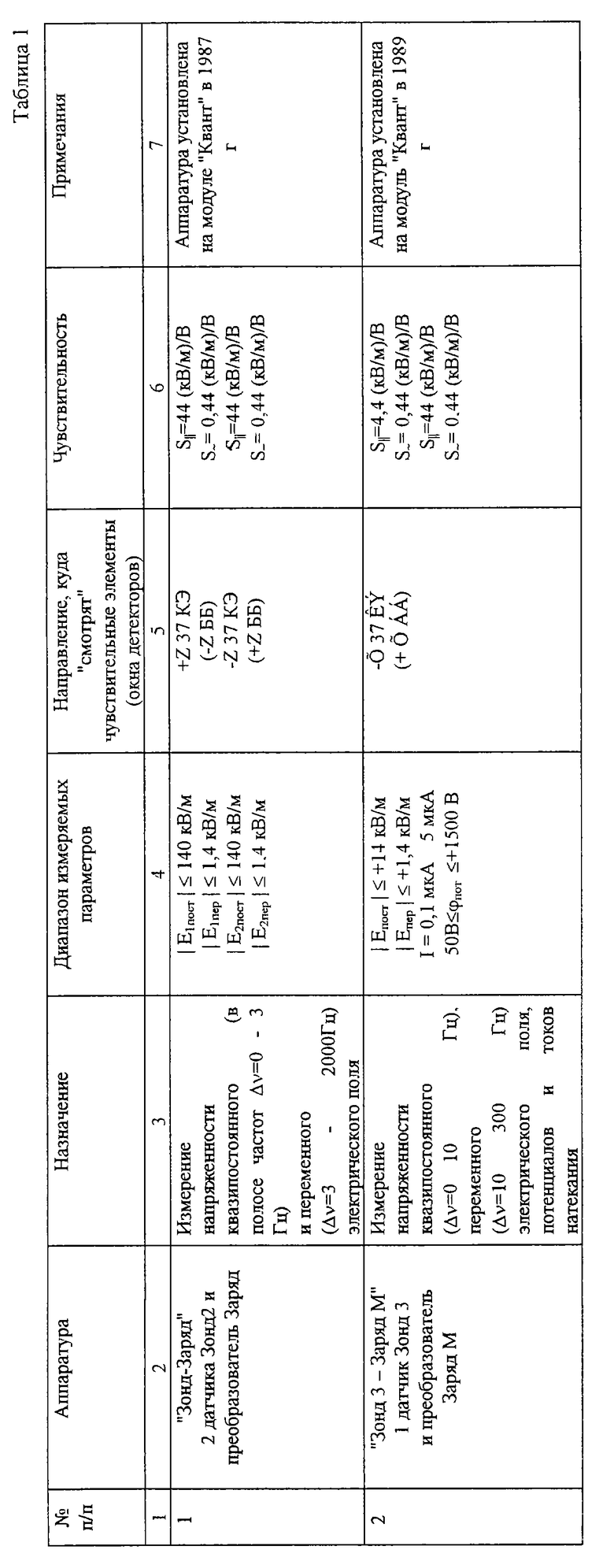
находилась в экране, а в фазе  выходила из экрана в область, где расположено измеряемое постоянное электрическое поле. В этом случае возникающий электрический ток между поверхностями будет изменяться с выбранной частотой механических колебаний, а амплитуда тока будет пропорциональна величине измеряемой напряженности постоянного электрического поля. В вышеупомянутой НА "Зонд-Заряд" [7,8] имеется канал измерения напряженности постоянного электрического поля. Недостатком данного способа измерения напряженности переменного и постоянного электрического поля и устройства, его реализующего, является низкая чувствительность. Именно поэтому датчики типа "Зонд-Заряд" используются для измерения напряженности электрических полей на поверхности КА, имеющих значения, попадающие в диапазон величин напряженностей электрических полей, измеряемых датчиками такого типа, что видно из [8] и указанной ниже табл. 1. В частности, характеристики датчиков, используемых на ОС "МИР", приведены в табл. 1.
выходила из экрана в область, где расположено измеряемое постоянное электрическое поле. В этом случае возникающий электрический ток между поверхностями будет изменяться с выбранной частотой механических колебаний, а амплитуда тока будет пропорциональна величине измеряемой напряженности постоянного электрического поля. В вышеупомянутой НА "Зонд-Заряд" [7,8] имеется канал измерения напряженности постоянного электрического поля. Недостатком данного способа измерения напряженности переменного и постоянного электрического поля и устройства, его реализующего, является низкая чувствительность. Именно поэтому датчики типа "Зонд-Заряд" используются для измерения напряженности электрических полей на поверхности КА, имеющих значения, попадающие в диапазон величин напряженностей электрических полей, измеряемых датчиками такого типа, что видно из [8] и указанной ниже табл. 1. В частности, характеристики датчиков, используемых на ОС "МИР", приведены в табл. 1.
Известен способ измерения постоянных и переменных электрических полей путем размещения в ионосфере нескольких (как правило 4) электрических датчиков в определенном относительном геометрическом расположении, на выбранных (желательно больших) расстояниях между ними и измерении электрического напряжения между датчиками. В частности, для измерения постоянных и переменных электрических полей в ионосфере Земли используется научная аппаратура типа "Спектр-Зонд-СМ" [10] , представляющая собой четыре датчика, разнесенные в пространстве на расстояния от единиц до десятка метров и соединенные с блоком первичного преобразования (БПП) сигнала через электрически непроводящие штанги, которые предназначены для механического крепления датчиков, а также передачи сигнала от датчиков в БПП. Способ измерения напряженности электрического поля в данном случае основан на измерении разности потенциалов  между двумя датчиками 1,2, расположенными на известном расстоянии Δl12, и компонента электрического поля в направлении
между двумя датчиками 1,2, расположенными на известном расстоянии Δl12, и компонента электрического поля в направлении  определяется
определяется  ; аналогично определяются другие компоненты электрического поля. Достоинствами способа и устройства, его реализующего, является возможность измерения напряженности электрического поля с высокой чувствительностью (0,1...100 мВ/м), недостатками - необходимость строгого учета побочных напряжений, возникающих между датчиками, именно, холловского напряжения
; аналогично определяются другие компоненты электрического поля. Достоинствами способа и устройства, его реализующего, является возможность измерения напряженности электрического поля с высокой чувствительностью (0,1...100 мВ/м), недостатками - необходимость строгого учета побочных напряжений, возникающих между датчиками, именно, холловского напряжения  напряжения, связанного с отличием потенциала плазмы от "плавающего" потенциала датчика, при этом величина этого отличия зависит от параметров плазмы (концентрации и температуры) и величины фототока с поверхности датчика, которая, в свою очередь, зависит от материала поверхности датчика и светотеневых условий проведения космического эксперимента (КЭ). Холловское напряжение может учитываться методически при знании с нужной точностью локальных векторов
напряжения, связанного с отличием потенциала плазмы от "плавающего" потенциала датчика, при этом величина этого отличия зависит от параметров плазмы (концентрации и температуры) и величины фототока с поверхности датчика, которая, в свою очередь, зависит от материала поверхности датчика и светотеневых условий проведения космического эксперимента (КЭ). Холловское напряжение может учитываться методически при знании с нужной точностью локальных векторов  (характерное значение Ex~0,2...0,5 В/м). Влияние факта отличия потенциала датчика от потенциала плазмы на точность измерений напряженности электрического поля в ионосферной плазме может быть уменьшено за счет выбора материала поверхности датчиков и обеспечения адекватности их прочих характеристик (формы, площади поверхности, светотеневой обстановки при проведении КЭ и т.д.).
(характерное значение Ex~0,2...0,5 В/м). Влияние факта отличия потенциала датчика от потенциала плазмы на точность измерений напряженности электрического поля в ионосферной плазме может быть уменьшено за счет выбора материала поверхности датчиков и обеспечения адекватности их прочих характеристик (формы, площади поверхности, светотеневой обстановки при проведении КЭ и т.д.).
Исследования упомянутых предвестников землетрясений с помощью устанавливаемой на космических аппаратах (КА) датчиковой аппаратуры для измерения электрических полей типа "Спектр-Зонд", несмотря на возможность измерения ею электрических полей с требуемой чувствительностью (при проведении целого ряда конструктивных и методических мероприятий), оказывается малоэффективным вследствие высокого уровня электромагнитных помех, создаваемых самими КА и превышающих, как правило, уровень электромагнитных возмущений, связанных с исследуемыми физическими явлениями. Принципиально возможно проводить вышеупомянутые высокочувствительные измерения электрических полей в ионосфере Земли на стандартных КА (и даже на крупногабаритных КА типа ОС "МИР", PC МКС) с применением НА типа "Спектр-Зонд" при установке их на фермах или выдвижных штангах, при этом должны быть разработаны мероприятия, обеспечивающие электромагнитную чистоту измерений датчиками (т.е. выбор необходимой длины ферм и штанг, а также обоснованный подбор материала, из которых они изготавливаются).
Возможна также установка высокочувствительной аппаратуры измерения электрических полей в ионосфере Земли (типа "Спектр-Зонд") на специализированные электромагнитно-чистые автономные субспутники, в частности, на орбитальном комплексе (ОК) "МИР" начаты такие работы, когда упомянутый субспутник доставляется транспортным грузовым кораблем (ТГК) "Прогресс" на ОС "МИР" и после проведения необходимых тестов отделяется от ОС "МИР" (или ТГК "Прогресс" при его автономном полете), и в дальнейшем субспутник функционирует в инфраструктуре ОК "МИР" (или в дальнейшем в инфраструктуре Российского сегмента Международной космической станции - PC МКС).
Известен способ измерения параметров магнитосферы Земли с помощью бариевых облаков [11]. Способ состоит в создании в магнитосфере сгустка разреженной плазмы путем выброса нейтрального бария с борта космического аппарата и его последующей ионизации солнечным излучением. Поведение ионизированного облака в магнитосфере определяется двумя основными процессами - диффузией и дрейфом в электрическом и магнитном полях. Измерение скорости дрейфа сгустка разреженной плазмы позволяет определить радиальную составляющую электрического поля (в направлении: наблюдатель - бариевое облако), а наблюдение за деформацией разреженного бариевого облака - установить направление магнитных силовых линий. Однако, эксперименты с бариевыми облаками обладают рядом недостатков, а именно:
- эксперимент с бариевыми облаками необходимо проводить сразу после захода Солнца или перед его восходом, когда облако бария освещается лучами Солнца (для ионизации атомов бария) и когда солнечное излучение, рассеянное на молекулах воздуха, не попадает в объектив фотоаппарата;
- эксперимент не позволяет определить перпендикулярную составляющую электрического поля, т. к. наблюдать за перемещением облака плазмы вдоль луча зрения невозможно. Использование для этой цели эффекта доплеровского смещения спектральных линий (пропорционального радиальной скорости электрического дрейфа) невозможно вследствие его малости для реально существующих электрических полей;
- невозможна интерпретация процессов, происходящих при расширении бариевого облака в магнитосфере Земли. Анализ условий реализации, точности и темпов обработки информации в экспериментах с бариевыми облаками на современном этапе развития ионосферной физики не позволяет оперативно и достоверно определять параметры поля, например, для прогноза землетрясения.
Более перспективным является предложение [11] использовать для исследования возмущений поля в ионосфере инжекцию ионных пучков под определенным углом к силовой линии магнитного поля с последующим анализом траектории движения ионов. Предложенное в [11] техническое решение близко к заявляемому способу и устройству, реализующему способ, и поэтому может быть выбрано в качестве аналога. Способ-аналог согласно [11] предполагает инжекцию с борта КА ионов одинаковой массы и заданной кинетической энергией в определенных направлениях к вектору индукции магнитного поля Земли, которое предварительно необходимо определить с помощью векторного магнитометра на КА. Приемник ионов с анализатором, определяющим энергию ионов, устанавливается на другом КА, совершающем совместный полет с первым КА.
Более детальная проработка предложенной идеи с подробным расчетным обоснованием требований к инжектору и детектору заряженных частиц в устройстве для реализации предложенного способа на орбитальной станции "МИР" изложена в докладе [12] . Там рассмотрен эксперимент "Арфа-И", который предполагалось провести на ОС "МИР" с использованием ТГК "Прогресс" при полете ТГК в составе ОС "МИР", заключающийся в том, что инжектированные ионы аппаратурой "Арфа-И", установленной на ТГК "Прогресс", после ларморовского оборота в магнитном поле Земли принимаются детектором, который установлен на модуле "Квант" ОС "МИР". Там же определен угол инжекции - угол между направлением инжекции иона и проекцией орбитальной скорости ОС "МИР" на плоскость, перпендикулярную вектору индукции локального магнитного поля Земли  , при котором реализуется попадание иона в детектор; определен также угол попадания иона в детектор. Однако в докладе не рассмотрены вопросы, связанные с измерением электрических и магнитных полей в ионосфере Земли путем ее зондирования импульсными ионными пучками.
, при котором реализуется попадание иона в детектор; определен также угол попадания иона в детектор. Однако в докладе не рассмотрены вопросы, связанные с измерением электрических и магнитных полей в ионосфере Земли путем ее зондирования импульсными ионными пучками.
В способе-прототипе [17] проводится инжекция импульсного ионного пучка ортогонально направлению вектора индукции локального магнитного поля  , измеренного на КА, с определенной частотой следования fимп и по совершению пучком ионов орбиты, составляющей часть ларморовской окружности (или несколько большую ларморовской окружности), импульс ионов регистрируется на детекторе, установленном на этом же КА.
, измеренного на КА, с определенной частотой следования fимп и по совершению пучком ионов орбиты, составляющей часть ларморовской окружности (или несколько большую ларморовской окружности), импульс ионов регистрируется на детекторе, установленном на этом же КА.
Недостатком способа является то, что не указано то требуемое направление инжекции ионов в плоскости  , которое обеспечивает возвращение ионов на детектор. Указанный способ-прототип позволяет измерять величину индукции магнитного поля в ионосфере Земли, но не позволяет измерять электрическое поле в ионосфере Земли.
, которое обеспечивает возвращение ионов на детектор. Указанный способ-прототип позволяет измерять величину индукции магнитного поля в ионосфере Земли, но не позволяет измерять электрическое поле в ионосфере Земли.
Блок-схема устройства, реализующая предлагаемый способ-прототип, включает инжектор ионов, детектор ионного пучка, векторный магнитометр для измерения вектора индукции локального магнитного поля Земли  и аппаратуру определения (измерения) вектора орбитальной скорости КА:
и аппаратуру определения (измерения) вектора орбитальной скорости КА:  , блок памяти исходных данных и блок обработки информации и выдачи результатов. В полетных условиях для каждого участка орбиты параметры векторов,
, блок памяти исходных данных и блок обработки информации и выдачи результатов. В полетных условиях для каждого участка орбиты параметры векторов,  известны с высокой точностью и могут быть заранее введены в блок памяти исходных данных.
известны с высокой точностью и могут быть заранее введены в блок памяти исходных данных.
Система работает следующим образом: при наличии требуемой ориентации инжектора ионов (вектора скорости ионов)  относительно векторов
относительно векторов  , что определяет блок памяти исходных данных, получающий информацию от векторного магнитометра о векторе индукции магнитного поля Земли
, что определяет блок памяти исходных данных, получающий информацию от векторного магнитометра о векторе индукции магнитного поля Земли  и аппаратуры определения (измерения) вектора орбитальной скорости КА
и аппаратуры определения (измерения) вектора орбитальной скорости КА  , включаются инжектор и детектор ионов и начинается инжекция импульсов ионов инжектором и прием их детектором; информация поступает в блок обработки информации и выдачи результатов. Блок обработки информации и выдачи результатов принимает данные от:
, включаются инжектор и детектор ионов и начинается инжекция импульсов ионов инжектором и прием их детектором; информация поступает в блок обработки информации и выдачи результатов. Блок обработки информации и выдачи результатов принимает данные от:
- магнитометра - о векторе магнитной индукции  в области движения иона;
в области движения иона;
- измерительной аппаратуры - о векторе орбитальной скорости КА -  ;
;
- блока памяти исходных данных - основные параметры, определяющие математическую модель предлагаемого способа.
Задачей изобретения является определение постоянных и переменных составляющих напряженности электрического поля в направлении вектора  и в плоскости
и в плоскости  .
.
Существо предлагаемого способа определения постоянных составляющих Ezo, EQ0 амплитуды EzA, EQA и частот fz, fQ переменных составляющих напряженности электрического поля в направлении вектора  и в плоскости
и в плоскости  заключается в следующем:
заключается в следующем:
- на борту космического аппарата (КА) определяется направление вектора индукции квазипостоянного магнитного поля Земли  , составляющей орбитальной скорости
, составляющей орбитальной скорости  на плоскость
на плоскость  и производится инжекция в плоскости Q под определенным углом к вектору
и производится инжекция в плоскости Q под определенным углом к вектору  пучка ионов заданной энергии с борта КА и его детектирование на этом же КА, при этом инжекцию и детектирование пучка ионов осуществляют в импульсном режиме, и перед инжекцией ионного пучка инжектируют импульсный электронный пучок заданной энергии, сканируют в плоскости П, проходящей через вектор
пучка ионов заданной энергии с борта КА и его детектирование на этом же КА, при этом инжекцию и детектирование пучка ионов осуществляют в импульсном режиме, и перед инжекцией ионного пучка инжектируют импульсный электронный пучок заданной энергии, сканируют в плоскости П, проходящей через вектор  и геометрическую ось инжектора, регистрируют на детекторе и определяют направление
и геометрическую ось инжектора, регистрируют на детекторе и определяют направление  инжекции, в котором достигается максимум интенсивности электронов, принимаемых детектором, затем инжектируемый ионный пучок сканируют в плоскости П вблизи направления
инжекции, в котором достигается максимум интенсивности электронов, принимаемых детектором, затем инжектируемый ионный пучок сканируют в плоскости П вблизи направления  и определяют направление
и определяют направление  инжекции ионного пучка, в котором достигается максимум интенсивности ионов, принимаемых детектором, далее определяют угол Δϕ между векторами
инжекции ионного пучка, в котором достигается максимум интенсивности ионов, принимаемых детектором, далее определяют угол Δϕ между векторами  как функцию текущего времени и на основании этого вычисляют величины постоянной составляющей Ezo, амплитуду EzA и частоту fz переменной составляющей напряженности электрического поля в направлении вектора
как функцию текущего времени и на основании этого вычисляют величины постоянной составляющей Ezo, амплитуду EzA и частоту fz переменной составляющей напряженности электрического поля в направлении вектора  , а по текущей временной зависимости величины максимума интенсивности приходящего в детектор ионного пучка определяют величину постоянной составляющей EQ0, амплитуду EQA и частоту fQ переменной составляющей напряженности электрического поля, лежащей в плоскости
, а по текущей временной зависимости величины максимума интенсивности приходящего в детектор ионного пучка определяют величину постоянной составляющей EQ0, амплитуду EQA и частоту fQ переменной составляющей напряженности электрического поля, лежащей в плоскости  .
.
Для решения поставленной задачи определения постоянных и переменных составляющих напряженности электрического поля в направлении вектора  и в плоскости
и в плоскости  предлагается устройство для его реализации, содержащее инжекторы и детекторы ионов и электронов; систему определения вектора индукции локального магнитного поля Земли
предлагается устройство для его реализации, содержащее инжекторы и детекторы ионов и электронов; систему определения вектора индукции локального магнитного поля Земли  ; систему определения вектора орбитальной скорости
; систему определения вектора орбитальной скорости  ; системы сканирования ионов и электронов; блоки формирования команд на включение и выключение электронных и ионных систем; анализаторы максимума интенсивности детектируемого пучка ионов и электронов; системы контроля инжектируемых ионного и электронного пучков; блок обработки и анализа информации и выдачи результатов; запоминающее устройство (ЗУ) вектора
; системы сканирования ионов и электронов; блоки формирования команд на включение и выключение электронных и ионных систем; анализаторы максимума интенсивности детектируемого пучка ионов и электронов; системы контроля инжектируемых ионного и электронного пучков; блок обработки и анализа информации и выдачи результатов; запоминающее устройство (ЗУ) вектора  - геометрической оси инжектора электронов; блок определения
- геометрической оси инжектора электронов; блок определения  - составляющей орбитальной скорости на плоскость
- составляющей орбитальной скорости на плоскость  ; блок определения угла β между векторами
; блок определения угла β между векторами  ; блок определения угла α между векторами
; блок определения угла α между векторами  ; блок памяти требуемых углов β0±Δβ0, α0±Δα0 и сравнения их соответственно с углами β и α.
; блок памяти требуемых углов β0±Δβ0, α0±Δα0 и сравнения их соответственно с углами β и α.
Выходы и входы блоков формирования команд на включение и выключение электронных и ионных систем соответственно подключены к входам инжекторов, детекторов, систем сканирования, блоков контроля инжектируемых пучков и анализаторов максимумов интенсивности детектируемых пучков электронов и ионов, при этом выходы детекторов электронов и ионов соответственно подключены ко входам анализаторов максимума интенсивности детектируемых пучков электронов и ионов, а выход анализатора максимума интенсивности детектируемого пучка электронов подключен ко входу блока формирования команд на включение и выключение ионных систем и ко входу системы сканирования ионов. Выход блока формирования команд на включение и выключение ионных систем подключен ко входу блока формирования команд на включение и выключение электронных систем. Выходы системы определения вектора индукции локального магнитного поля Земли  и системы определения вектора орбитальной скорости
и системы определения вектора орбитальной скорости  подключены ко входам блока определения
подключены ко входам блока определения  , при этом выход системы определения вектора индукции локального магнитного поля Земли
, при этом выход системы определения вектора индукции локального магнитного поля Земли  и выход ЗУ вектора
и выход ЗУ вектора  подсоединены к входам блока определения угла β между векторами
подсоединены к входам блока определения угла β между векторами  , выход которого подсоединен ко входу блока памяти требуемых углов β0±Δβ0, α0±Δα0 и сравнения их соответственно с углами β и α, ко входу которого подсоединен выход блока определения угла α между векторами
, выход которого подсоединен ко входу блока памяти требуемых углов β0±Δβ0, α0±Δα0 и сравнения их соответственно с углами β и α, ко входу которого подсоединен выход блока определения угла α между векторами  , при этом ко входу блока определения угла α между векторами
, при этом ко входу блока определения угла α между векторами  подсоединены выходы ЗУ и блока определения
подсоединены выходы ЗУ и блока определения  составляющей орбитальной скорости на плоскость
составляющей орбитальной скорости на плоскость  , выход блока памяти подсоединен ко входу блока формирования команд на включение электронных систем, и, наконец, выходы блоков формирования команд на включение и выключение электронных и ионных систем, системы определения вектора индукции локального магнитного поля Земли
, выход блока памяти подсоединен ко входу блока формирования команд на включение электронных систем, и, наконец, выходы блоков формирования команд на включение и выключение электронных и ионных систем, системы определения вектора индукции локального магнитного поля Земли  , системы определения вектора орбитальной скорости
, системы определения вектора орбитальной скорости  , ЗУ вектора
, ЗУ вектора  - геометрической оси инжектора электронов, блока определения
- геометрической оси инжектора электронов, блока определения  - составляющей орбитальной скорости на плоскость
- составляющей орбитальной скорости на плоскость  , блока определения угла β между векторами
, блока определения угла β между векторами  , блока определения угла α между векторами
, блока определения угла α между векторами  , блока памяти требуемых углов β0±Δβ0, α0±Δα0 и сравнения их соответственно с углами β и α подключены к входу блока обработки и анализа информации и выдачи результатов.
, блока памяти требуемых углов β0±Δβ0, α0±Δα0 и сравнения их соответственно с углами β и α подключены к входу блока обработки и анализа информации и выдачи результатов.
В ряде случаев является целесообразным объединение в одном блоке инжектора ионов и инжектора электронов, детектора ионов и детектора электронов, системы сканирования электронов
и системы сканирования ионов, системы контроля инжектируемого электронного пучка и системы контроля инжектируемого ионного пучка. Такое объединение позволит решить проблему взаимной увязки геометрических осей электронного и ионного пучков, что является существенным обстоятельством для решения поставленной задачи, а также позволит объединить блоки формирования команд на включение и выключение электронных и ионных систем, а также анализатор максимума интенсивности детектируемого пучка электронов и анализатор максимума интенсивности детектируемого пучка ионов. Все это даст возможность снизить массово-габаритные характеристики устройства в целом, что крайне важно для ракетно-космических систем. Наконец, на основании предыдущего опыта проведения геофизических космических экспериментов на ОС "МИР", требующих знания в данный момент времени вектора индукции локального магнитного поля Земли  , что закладывается в память бортового цифрового вычислительного комплекса (БЦВК) с корректировкой заложенных данных модели магнитного поля Земли путем измерений трехкомпонентным магнитометром на борту. Известно также, что в БЦВК содержатся данные о векторе орбитальной скорости
, что закладывается в память бортового цифрового вычислительного комплекса (БЦВК) с корректировкой заложенных данных модели магнитного поля Земли путем измерений трехкомпонентным магнитометром на борту. Известно также, что в БЦВК содержатся данные о векторе орбитальной скорости  КА, как функции текущего времени, при движении КА по орбите. Все это дает возможность в поблочной схеме предлагаемого устройства функционального объединения системы определения вектора орбитальной скорости
КА, как функции текущего времени, при движении КА по орбите. Все это дает возможность в поблочной схеме предлагаемого устройства функционального объединения системы определения вектора орбитальной скорости  , системы определения вектора индукции локального магнитного поля Земли
, системы определения вектора индукции локального магнитного поля Земли  , запоминающего устройства (ЗУ) вектора
, запоминающего устройства (ЗУ) вектора  - геометрической оси инжектора электронов, блока определения угла β между векторами
- геометрической оси инжектора электронов, блока определения угла β между векторами  , блока определения угла α между векторами
, блока определения угла α между векторами  и блока памяти требуемых углов β0±Δβ0 и α0±Δα0 и сравнения их соответственно с углами α и β в единый блок, являющийся составной частью БЦВК.
и блока памяти требуемых углов β0±Δβ0 и α0±Δα0 и сравнения их соответственно с углами α и β в единый блок, являющийся составной частью БЦВК.
Приведем научно-техническое обоснование возможности реализации способа определения постоянных составляющих Ezo, EQ0, амплитуд EzA, EQA и частот fz и fQ переменных составляющих напряженности электрического поля в направлении вектора  и в плоскости
и в плоскости 
Алгоритм определения угла α0 между вектором скорости инжекции пучка и осью х, перпендикулярной к  :
:
Рассмотрим движение иона в плоскости Q, перпендикулярной вектору индукции магнитного поля Земли  в системе координат, движущейся со скоростью
в системе координат, движущейся со скоростью  (компонента орбитальной скорости КА, лежащая в плоскости Q) относительно Земли, необходимо ввести электрическое поле
(компонента орбитальной скорости КА, лежащая в плоскости Q) относительно Земли, необходимо ввести электрическое поле  В рассматриваемой (на фиг. 1, 2) системе координат векторное уравнение движения иона
В рассматриваемой (на фиг. 1, 2) системе координат векторное уравнение движения иона
принимает вид:
Решение данной системы уравнений с учетом начальных условий
(на фиг. 1 начальный угол инъекции иона +α0, на фиг. 2 - (-α0) принимает вид:
здесь  - циклическая (ларморовская) частота обращения иона.
- циклическая (ларморовская) частота обращения иона.
Считая, что детектор находится в точке инжекции иона, выделим из множества циклоид, задаваемых величинами υорбQ, υинж0, те, которые проходят через начало координат.
Запишем уравнения движения иона (5), введя безразмерное время в виде Z = t/τл, где τл - время ларморовского обращения иона:
Если величина t0 определяет время попадания иона в детектор (тогда Z0 = t0/τлар ), то система из двух уравнений (6) примет вид:
Несложные преобразования позволяют привести эту систему уравнений к виду:
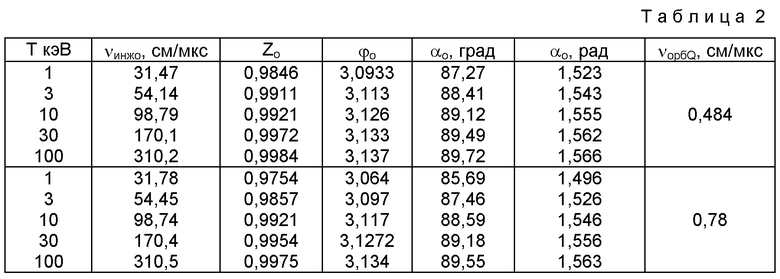
Данная система уравнений связывает абсолютную величину угла α0 инжекции иона в плоскости Q в принятой системе координат и относительное время движения Z0 от инжектора до детектора (для данной точки орбиты, задающей величину υорбQ, и для определенного иона с энергией покоя E0, кинетической энергией T0 и соответственно скоростью υинж0 = Csgrt(2T0/E0). В табл. 2 представлены вычисленные значения α0, Z0 и ф0 = πZ0 для ионов дейтерия с кинетическими энергиями Т= 1, 3, 10, 30, 100 кэВ для двух точек орбиты - в восходящем узле орбиты (магнитный экватор) с υорбQ = 0,484 см/мкс и в точке кульминации орбиты υорбQ = 0,78 см/мкс.
Определим величину смещения Δz электрона и иона за период ларморовского обращения τлар в направлении  при наличии квазипостоянного электрического поля
при наличии квазипостоянного электрического поля  , критерием квазипостоянности электрического поля является требование, что за период ларморовского обращения частицы величина
, критерием квазипостоянности электрического поля является требование, что за период ларморовского обращения частицы величина  меняется незначительно, т. е.
меняется незначительно, т. е.  . Последнее условие означает, что частота изменения переменного электрического поля должна быть много меньше частоты ларморовского обращения. Для представляющих интерес ионов водорода или дейтерия частота изменения электрического поля не должна превышать fмакс≈30 Гц. Итак величина смещения Δz частицы за время τл
. Последнее условие означает, что частота изменения переменного электрического поля должна быть много меньше частоты ларморовского обращения. Для представляющих интерес ионов водорода или дейтерия частота изменения электрического поля не должна превышать fмакс≈30 Гц. Итак величина смещения Δz частицы за время τл
Ожидаемые значения Ezo=0,1...100 мВ/м [13] для ионов дейтерия τл≈3 мс, для электронов τл≈1 мкс, [14]. В соответствии с соотношением (9) величина смещения электрона Δze= (10-3 ...10) см, иона Δzi=0,05...500 м. Видно, что наличие ожидаемых электрических полей Ezo=0,1...100 мВ/м вдоль вектора  не приводит (за исключением Ezo= 40...100 мВ/м) к уходу электрона из пл. Q на размер, больший размера окна детектора Δlg≈4 см, и наоборот смещает ион вдоль вектора
не приводит (за исключением Ezo= 40...100 мВ/м) к уходу электрона из пл. Q на размер, больший размера окна детектора Δlg≈4 см, и наоборот смещает ион вдоль вектора  на размер, заведомо больший размера окна детектора. Если, например, вектор электрического поля
на размер, заведомо больший размера окна детектора. Если, например, вектор электрического поля  , то для того, чтобы ион дейтерия зарегистрировать на детекторе, необходимо при его инжекции сообщить ему начальную составляющую скорости
, то для того, чтобы ион дейтерия зарегистрировать на детекторе, необходимо при его инжекции сообщить ему начальную составляющую скорости  направленную против вектора
направленную против вектора  ; тогда уравнение движения иона вдоль оси
; тогда уравнение движения иона вдоль оси  будет иметь вид
будет иметь вид
где начало координат оси z: zo=0 совпадает с центром инжектора и окна детектора. Условие попадания пучка ионов в окно детектора после совершения ларморовского оборота:
Откуда:
обозначая основную составляющую скорости иона, лежащую в плоскости Q, через υQ, получим, что угол Δϕ между векторами  дается выражением:
дается выражением:
откуда величина Ezo выражается через Δϕ [14]:
где mi - масса иона.
Окончательно:
где Ti - кинетическая энергия ионов,
Wi - энергия покоя ионов.
В табл. 3. представлены значения ожидаемого угла Δϕ (град) между векторами  для четырех значений Ezo=0,1; 1; 10; 100 мВ/м и трех значений кинетических энергий ионов дейтерия Ti1=1 кэВ; Ti2=10 кэВ; Ti3=100 кэВ.
для четырех значений Ezo=0,1; 1; 10; 100 мВ/м и трех значений кинетических энергий ионов дейтерия Ti1=1 кэВ; Ti2=10 кэВ; Ti3=100 кэВ.
Как сказано выше, при сканировании электронного пучка в плоскости П определяется направление  , при этом оно задается напряжением сканирования ue, обеспечивающем максимальное значение потока детектируемых электронов, далее ue пересчитывается в ui система сканирования ионов задает начальное ui и в дальнейшем сканирование происходит от значения ui, до значения u'i, при котором достигается максимум интенсивности детектируемого пучка ионов. Текущая величина Ez компоненты напряженности электрического поля вдоль вектора
, при этом оно задается напряжением сканирования ue, обеспечивающем максимальное значение потока детектируемых электронов, далее ue пересчитывается в ui система сканирования ионов задает начальное ui и в дальнейшем сканирование происходит от значения ui, до значения u'i, при котором достигается максимум интенсивности детектируемого пучка ионов. Текущая величина Ez компоненты напряженности электрического поля вдоль вектора  определяется через ui, и u'i по формуле:
определяется через ui, и u'i по формуле:
где Rл - ларморовский радиус иона в магнитном поле Земли [14]:
L - длина отклоняющих пластин,
d - расстояние между отклоняющими пластинами,
Ti - кинетическая энергия ионов,
E0 - энергия покоя иона,
e - заряд иона,
Bз - индукция магнитного поля Земли,
с - скорость света в вакууме.
Найдем формулу пересчета ue в ui; если в момент проведения измерений геометрическая ось инжектора составляет угол Δϕ с плоскостью  , то составляющая скорости частицы
, то составляющая скорости частицы  для компенсации этой составляющей системой сканирования необходимо приложить напряжение u.
для компенсации этой составляющей системой сканирования необходимо приложить напряжение u.
В общем случае пересчет ue в ui определяется различием в кинетических энергиях Te и Ti, при равенстве кинетических энергий  но полярность подачи напряжений на отклоняющие пластины должна быть противоположной для положительных ионов и отрицательных электронов; в табл. 4 представлены требуемые значения напряжения (в вольтах) для трех значений кинетических энергий T1= 1 кэВ, T2= 10 кэВ, T3= 100 кэВ и трех углов Δϕ: Δϕ1= 10; Δϕ2= 20; Δϕ3= 30.
но полярность подачи напряжений на отклоняющие пластины должна быть противоположной для положительных ионов и отрицательных электронов; в табл. 4 представлены требуемые значения напряжения (в вольтах) для трех значений кинетических энергий T1= 1 кэВ, T2= 10 кэВ, T3= 100 кэВ и трех углов Δϕ: Δϕ1= 10; Δϕ2= 20; Δϕ3= 30.
Величина d/L выбрана равной d/L = 0,1; d/L =0,01.
Наконец, в табл. 5 представлены требуемые значения u'i - ui для ионов дейтерия кинетической энергии T1, T2, T3 и для трех значений Ezo: Ezo=100 мВ/м; Ezo=10 мВ/м; Ezo= 1 мВ/м, вычисленные на основании выражения (16).
Величина Вз = 0,4 Гс.
В случае присутствия в ионосфере переменной компоненты электрического поля  измеряемая величина u'i - ui будет меняться с частотой fz этого поля, однако, как было сказано выше, измерение Еz можно проводить на частоте fz<< fл, где fл - частота ларморовского обращения иона в магнитном поле Земли fл~300...400 Гц для ионов дейтерия.
измеряемая величина u'i - ui будет меняться с частотой fz этого поля, однако, как было сказано выше, измерение Еz можно проводить на частоте fz<< fл, где fл - частота ларморовского обращения иона в магнитном поле Земли fл~300...400 Гц для ионов дейтерия.
Если переменная составляющая напряженности электрического поля меняется по закону Ez = EzAsin(2πfz+ϕz) и в общем случае частота посылок импульсов электронов и ионов fимп не кратна fz, то угол Δϕ будет меняться с частотой fz, а его максимальное значение Δϕмакс даст величину ЕzА по аналогии с выражением (7) описания изобретения:
Если одновременно присутствуют постоянная составляющая электрического поля Ez0 и переменная составляющая Ez = EzAsin(2πfz+ϕz), то в этом случае угол Δϕ между  , меняющийся с частотой fz, будет иметь постоянную составляющую Δϕ0 и переменную
, меняющийся с частотой fz, будет иметь постоянную составляющую Δϕ0 и переменную
Δϕпер = ΔϕAsin(2πfz+ϕz) (19)
и соответственно постоянная составляющая напряженности электрического поля определяется выражением:
а амплитуда переменной составляющей:
Если есть постоянная составляющая напряженности электрического поля  , то ион дрейфует в плоскости
, то ион дрейфует в плоскости  в направлении, перпендикулярном вектору
в направлении, перпендикулярном вектору  , что представлено на фиг. 3 (для случая, когда скорость инжекции в плоскости
, что представлено на фиг. 3 (для случая, когда скорость инжекции в плоскости  ) и на фиг. 4, (для случая, когда скорость инжекции в плоскости
) и на фиг. 4, (для случая, когда скорость инжекции в плоскости  ).
).
Скорость дрейфового движения заряженной частицы, в скрещенных электрическом и магнитном полях, дается выражением:
За время ларморовского оборота τл, ион в плоскости Q совершит дрейф в направлении оси, перпендикулярной к вектору  ; величина дрейфа (фиг. 3, 4)
; величина дрейфа (фиг. 3, 4)
представлена на фиг.5 в зависимости от EQ, меняющегося в диапазоне:
EQ= 0,1... 100 мВ/м.
Как видно из фиг 4, в этом случае регистрация ионов на части входного окна детектора, расположенной против инжектируемого пучка, возможна, если инжектор располагается в точке А (фиг. 4), инжекция ионов происходит в направлении, перпендикулярном  , а детектор, входное окно которого выполнено в виде линейной структуры с продольным размером lx~1 м и поперечным lz~ 1...10 см, располагается с обратной стороны инжектора так, что размер lx располагается перпендикулярно к
, а детектор, входное окно которого выполнено в виде линейной структуры с продольным размером lx~1 м и поперечным lz~ 1...10 см, располагается с обратной стороны инжектора так, что размер lx располагается перпендикулярно к  , а lz - вдоль
, а lz - вдоль  , при этом вдоль размера lx располагается целый набор секторов детектора с размером каждого сектора Δlx~ 1...10 см. После этого инжектор и детектор поворачиваются на 90o и пучок регистрируется детектором, расположенным на расстоянии lдр от инжектора. Величина
, при этом вдоль размера lx располагается целый набор секторов детектора с размером каждого сектора Δlx~ 1...10 см. После этого инжектор и детектор поворачиваются на 90o и пучок регистрируется детектором, расположенным на расстоянии lдр от инжектора. Величина  вычисляется на основании выражения (23)
вычисляется на основании выражения (23)
В случае, если электромагнитная волна распространяется вдоль магнитной силовой линии (ось Z) и имеет эллиптическую поляризацию, то в этом случае при расположении детектора с обратной стороны инжектора и выполненного, как было указано выше, в виде линейной структуры с размерами lx~1 м и поперечным lz~ 1. ..10 см, то при любой ориентации оси инжектора в плоскости  и при выполнении условия
и при выполнении условия  , где TВ - период электромагнитных колебаний, fВ - частота электромагнитной волны, τЛ - период ларморовского обращения иона в магнитном поле Земли, пучок ионов с частотой fВ электромагнитной волны будет попадать в отдельные сектора линейного детектора, при этом lxмакс= lдрмакс будет соответствовать EQA аналогично выражению (23):
, где TВ - период электромагнитных колебаний, fВ - частота электромагнитной волны, τЛ - период ларморовского обращения иона в магнитном поле Земли, пучок ионов с частотой fВ электромагнитной волны будет попадать в отдельные сектора линейного детектора, при этом lxмакс= lдрмакс будет соответствовать EQA аналогично выражению (23):
По аналогии с определением Ez0, EzА и fz при одновременном наличии постоянной и переменной компоненты напряженности электрического поля, направленной вдоль силовой линии магнитного поля Земли, проводится определение постоянной EQ, амплитуды переменной EQA и частоты fQ компоненты напряженности электрического поля, лежащей в плоскости  . В этом случае величина дрейфа lдр будет меняться от некоторого минимального значения lдрмин до максимального значения lдрмакс с частотой определяемых электромагнитных колебаний и величина постоянной компоненты EQ будет определяться через среднее значение lдрср
. В этом случае величина дрейфа lдр будет меняться от некоторого минимального значения lдрмин до максимального значения lдрмакс с частотой определяемых электромагнитных колебаний и величина постоянной компоненты EQ будет определяться через среднее значение lдрср выражением:
выражением:
а амплитуда переменной компоненты будет определяться через среднее отклонение величины дрейфа от lдрср выражением:
выражением:
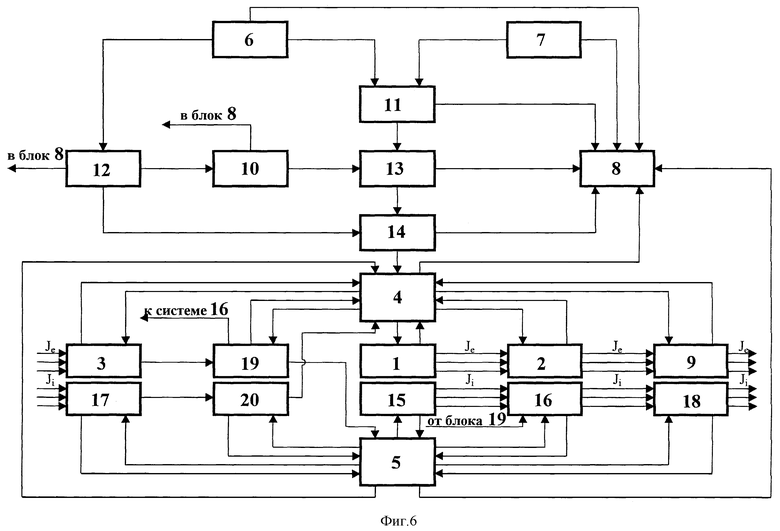
Блок-схема устройства по п. 2 формулы изобретения для осуществления способа определения электрических полей в ионосфере Земли представлена на фиг. 6; здесь
1 - инжектор электронов;
2 - система сканирования электронов;
3 - детектор электронов;
4 - блок формирования команд на включение и выключение электронных систем;
5 - блок формирования команд на включение и выключение ионных систем;
6 - система определения вектора индукции локального магнитного поля Земли  ;
;
7 - система определения вектора орбитальной скорости  ;
;
8 - блок обработки и анализа информации и выдачи результатов;
9 - система контроля инжектируемого электронного пучка;
10 - ЗУ вектора  , направленного по геометрической оси инжектора электронов;
, направленного по геометрической оси инжектора электронов;
11 - блок определения  - составляющей орбитальной скорости на плоскость
- составляющей орбитальной скорости на плоскость  ;
;
12 - блок определения угла β между векторами  ;
;
13 - блок определения угла α между векторами  ;
;
14 - блок памяти требуемых углов β0±Δβ0, α0±Δα0 и сравнения их соответственно с углами β и α;
15 - инжектор ионов;
16 - система сканирования ионов;
17 - детектор ионов;
18 - система контроля инжектируемого ионного пучка;
19 - анализатор максимума интенсивности детектируемого пучка электронов;
20 - анализатор максимума интенсивности детектируемого пучка ионов.
Выходы и входы блоков 4, 5 (формирование команд на включение и выключение инжектора, детектора, системы сканирования, блока контроля инжектируемого пучка и анализатора максимума интенсивности детектируемого пучка электронов и ионов соответственно) подключены ко входам и выходам инжекторов 1, 15, детекторов 3, 17, систем сканирования 2, 16, систем контроля инжектируемых пучков 9, 18 и анализаторов максимумов интенсивности детектируемых пучков 19, 20 электронов и ионов, при этом выходы детекторов 3, 17 электронов и ионов соответственно подключены ко входам анализаторов максимума интенсивности детектируемых пучков 19 электронов и 20 ионов, а выход анализатора максимума интенсивности детектируемого пучка электронов 19 подключен к входу блока 5 формирования команд на включение и выключение систем 15, 16, 17, 18, 20 и к системе сканирования ионов 16. Выход блока 5 формирования команд на включение и выключение ионных систем 15, 16, 17, 18, 20 подключен к входу блока 4 формирования команд на включение электронных систем 1, 2, 3, 9, 19. Выходы системы 6 определения вектора индукции локального магнитного поля Земли  и системы 7 определения вектора орбитальной скорости
и системы 7 определения вектора орбитальной скорости  подключены ко входам блока 11 определения
подключены ко входам блока 11 определения  - составляющей орбитальной скорости на плоскость
- составляющей орбитальной скорости на плоскость  , при этом выход системы 6 и выход ЗУ 10 вектора
, при этом выход системы 6 и выход ЗУ 10 вектора  - геометрической оси инжектора электронов подсоединены ко входу блока 12 определения угла β между векторами
- геометрической оси инжектора электронов подсоединены ко входу блока 12 определения угла β между векторами  , выход которого подсоединен ко входу блока памяти 14 требуемых углов β0±Δβ0, α0±Δα0 и сравнения их соответственно с углами β и α, ко входу которого подсоединен также выход блока 13 определения угла α между векторами
, выход которого подсоединен ко входу блока памяти 14 требуемых углов β0±Δβ0, α0±Δα0 и сравнения их соответственно с углами β и α, ко входу которого подсоединен также выход блока 13 определения угла α между векторами  , при этом
, при этом
ко входу блока 13 подсоединены выходы ЗУ 10 и блока 11, выход блока памяти 14 подсоединен ко входу блока 4 формирования команд на включение и выключение систем 1, 2, 3, 9, 19, и, наконец, выходы блоков 4, 5 формирования команд на включение и выключение электронных и ионных систем, системы определения вектора индукции локального магнитного поля Земли  6, системы определения вектора орбитальной скорости
6, системы определения вектора орбитальной скорости  7, ЗУ вектора
7, ЗУ вектора  - геометрической оси инжектора электронов 10, блока определения
- геометрической оси инжектора электронов 10, блока определения  - составляющей орбитальной скорости на плоскость
- составляющей орбитальной скорости на плоскость  11, блока определения угла β между векторами
11, блока определения угла β между векторами  12, блока определения угла α между векторами
12, блока определения угла α между векторами  13, блока памяти требуемых углов β0±Δβ0, α0±Δα0 и сравнения их соответственно с углами β и α 14 подключены к входу блока обработки и анализа информации и выдачи результатов 8.
13, блока памяти требуемых углов β0±Δβ0, α0±Δα0 и сравнения их соответственно с углами β и α 14 подключены к входу блока обработки и анализа информации и выдачи результатов 8.
Работа всего устройства для осуществления способа определения электрических полей в ионосфере Земли производится следующим образом:
При наличии требуемой ориентации геометрической оси инжектора электронов  относительно векторов:
относительно векторов:  - вектора индукции локального магнитного поля Земли и
- вектора индукции локального магнитного поля Земли и  - составляющей орбитальной скорости на плоскость
- составляющей орбитальной скорости на плоскость  , что фиксирует блок памяти 14 требуемых углов β0±Δβ0, α0±Δα0 и сравнения их соответственно с углами β и α, то есть, если определенные углы β и α одновременно удовлетворяют условиям: β0-Δβ0≤β≤β0+Δβ0 и α0-Δα0≤α≤α0+Δα0, то блок 4 включает инжектор электронов 1, детектор электронов 3, систему сканирования электронного пучка 2, систему контроля инжектируемого электронного пучка 9 и анализатор максимума интенсивности детектируемого пучка электронов 19 и при достижении максимума интенсивности детектируемого электронного пучка, что фиксируется блоком 19, блоком 4 выключаются блоки 1, 2, 3, 9, 19 и блоком 5 включаются инжектор ионов 15, детектор ионов 17, система сканирования ионов 16, система контроля инжектируемого ионного пучка 18 и анализатор максимума интенсивности детектируемого пучка ионов 20, при этом начальное напряжение ui сканирования ионного пучка устанавливается в соответствии с тем напряжением ue сканирования электронного пучка, при котором достигнут максимум интенсивности детектируемого электронного пучка. Соответственно анализатор 20 максимума интенсивности детектируемого ионного пучка дает сигнал в блок 5 на остановку системы сканирования ионного пучка, как только достигается максимум интенсивности детектируемого ионного пучка и на фиксирование напряжения сканирования u'i, при котором этот максимум достигнут; блок 5 формирования команд на включение и выключение ионных систем передает также сигнал на разрешение работы блока 4 формирования команд на включение и выключение электронных систем, при этом блок 4 запускает в аналогичный цикл электронные системы, как только в нее поступит разрешающая команда из блока памяти и сравнения 14.
, что фиксирует блок памяти 14 требуемых углов β0±Δβ0, α0±Δα0 и сравнения их соответственно с углами β и α, то есть, если определенные углы β и α одновременно удовлетворяют условиям: β0-Δβ0≤β≤β0+Δβ0 и α0-Δα0≤α≤α0+Δα0, то блок 4 включает инжектор электронов 1, детектор электронов 3, систему сканирования электронного пучка 2, систему контроля инжектируемого электронного пучка 9 и анализатор максимума интенсивности детектируемого пучка электронов 19 и при достижении максимума интенсивности детектируемого электронного пучка, что фиксируется блоком 19, блоком 4 выключаются блоки 1, 2, 3, 9, 19 и блоком 5 включаются инжектор ионов 15, детектор ионов 17, система сканирования ионов 16, система контроля инжектируемого ионного пучка 18 и анализатор максимума интенсивности детектируемого пучка ионов 20, при этом начальное напряжение ui сканирования ионного пучка устанавливается в соответствии с тем напряжением ue сканирования электронного пучка, при котором достигнут максимум интенсивности детектируемого электронного пучка. Соответственно анализатор 20 максимума интенсивности детектируемого ионного пучка дает сигнал в блок 5 на остановку системы сканирования ионного пучка, как только достигается максимум интенсивности детектируемого ионного пучка и на фиксирование напряжения сканирования u'i, при котором этот максимум достигнут; блок 5 формирования команд на включение и выключение ионных систем передает также сигнал на разрешение работы блока 4 формирования команд на включение и выключение электронных систем, при этом блок 4 запускает в аналогичный цикл электронные системы, как только в нее поступит разрешающая команда из блока памяти и сравнения 14.
Блок-схема устройства по п. 3 формулы изобретения для осуществления способа определения электрических полей в ионосфере Земли представлена на фиг. 7, здесь
6 - система определения вектора индукции локального магнитного поля Земли  ;
;
7 - система определения вектора орбитальной скорости  ;
;
8 - блок обработки и анализа информации и выдачи результатов;
10 - ЗУ вектора  , направленного по геометрической оси инжектора электронов;
, направленного по геометрической оси инжектора электронов;
11 - блок определения  - составляющей орбитальной скорости на плоскость
- составляющей орбитальной скорости на плоскость  ;
;
12 - блок определения угла β между векторами  ;
;
13 - блок определения угла α между векторами  ;
;
14 - блок памяти требуемых углов β0±Δβ0, α0±Δα0 и сравнения их соответственно с углами β и α;
21 - инжектор заряженных частиц;
22 - детектор заряженных частиц;
23 - система сканирования пучков заряженных частиц;
24 - система контроля инжектируемых пучков заряженных частиц;
25 - анализатор максимумов интенсивности детектируемых пучков заряженных частиц;
26 - блок формирования команд на включение и выключение пучковых систем.
Выходы и входы блока 26 формирования команд на включение и выключение пучковых систем соответственно подключены ко входам и выходам инжектора заряженных частиц 21, детектора заряженных частиц 22, системы сканирования пучков заряженных частиц 23, системы контроля пучков заряженных частиц 24 и анализатора максимумов интенсивности детектируемых пучков заряженных частиц 25, при этом выход детектора заряженных частиц 22 подключен ко входу анализатора максимумов интенсивности детектируемых пучков заряженных частиц 25, выход которого подключен ко входу системы сканирования пучков заряженных частиц 23. Выходы системы 6 определения вектора индукции локального магнитного поля Земли  и системы 7 определения вектора орбитальной скорости
и системы 7 определения вектора орбитальной скорости  подключены ко входам блока 11 определения
подключены ко входам блока 11 определения  - составляющей орбитальной скорости на плоскость
- составляющей орбитальной скорости на плоскость  , при этом выход системы 6 и выход ЗУ 10 вектора
, при этом выход системы 6 и выход ЗУ 10 вектора  - геометрической оси инжектора электронов подсоединены ко входу блока 12 определения угла β между векторами
- геометрической оси инжектора электронов подсоединены ко входу блока 12 определения угла β между векторами  , выход которого подсоединен ко входу блока памяти 14 требуемых углов β0±Δβ0, α0±Δα0 и сравнения их соответственно с углами β и α, ко входу которого подсоединен также выход блока 13 определения угла α между векторами
, выход которого подсоединен ко входу блока памяти 14 требуемых углов β0±Δβ0, α0±Δα0 и сравнения их соответственно с углами β и α, ко входу которого подсоединен также выход блока 13 определения угла α между векторами  , при этом ко входу блока 13 подсоединены выходы ЗУ 10 и блока 11, выход блока памяти 14 подсоединен ко входу блока 26 формирования команд на включение и выключение пучковых систем, выходы которого, а также выходы системы определения вектора индукции локального магнитного поля Земли
, при этом ко входу блока 13 подсоединены выходы ЗУ 10 и блока 11, выход блока памяти 14 подсоединен ко входу блока 26 формирования команд на включение и выключение пучковых систем, выходы которого, а также выходы системы определения вектора индукции локального магнитного поля Земли  6, системы определения вектора орбитальной скорости
6, системы определения вектора орбитальной скорости  7, ЗУ вектора
7, ЗУ вектора  - геометрической оси инжектора электронов 10, блока определения
- геометрической оси инжектора электронов 10, блока определения  составляющей орбитальной скорости на плоскость
составляющей орбитальной скорости на плоскость  11, блока определения угла β между векторам
11, блока определения угла β между векторам  12, блока определения угла α между векторами
12, блока определения угла α между векторами  13, блока памяти требуемых углов β0±Δβ0, α0±Δα0 и сравнения их соответственно с углами β и α 14 подключены к входу блока обработки и анализа информации и выдачи результатов 8.
13, блока памяти требуемых углов β0±Δβ0, α0±Δα0 и сравнения их соответственно с углами β и α 14 подключены к входу блока обработки и анализа информации и выдачи результатов 8.
Работа всего устройства для осуществления способа определения электрических полей в ионосфере Земли производится следующим образом:
При наличии требуемой ориентации геометрической оси инжектора электронов  относительно векторов:
относительно векторов:  - вектора индукции локального магнитного поля Земли и
- вектора индукции локального магнитного поля Земли и  - составляющей орбитальной скорости на плоскость
- составляющей орбитальной скорости на плоскость  , что фиксирует блок памяти 14 требуемых углов β0±Δβ0, α0±Δα0 и сравнения их соответственно с углами β и α, то есть, если определенные β и α одновременно удовлетворяют условиям: β0-Δβ0≤β≤β0+Δβ0 и α0-Δα0≤α≤α0+Δα0, то блок 26 включает инжектор 21, детектор 22, систему сканирования 23, систему контроля инжектируемых пучков 24, анализатор максимумов интенсивности детектируемых пучков 25 в режим работы с электронными пучками и при достижении максимума интенсивности детектируемого электронного пучка, что фиксируется блоком 25, блоком 26, инжектор 21, детектор 22, система сканирования 23, система контроля инжектируемых пучков 24, анализатор максимумов интенсивности детектируемых пучков 25 переводятся в режим работы с ионными пучками, при этом начальное напряжение сканирования ионного пучка ui устанавливается в соответствии с тем напряжением сканирования электронного пучка ue, при котором достигнут максимум интенсивности детектируемого электронного пучка. Соответственно анализатор максимумов интенсивности детектируемых пучков 25 дает сигнал в блок 26 на остановку сканирования ионного пучка системой 23, как только достигается максимум интенсивности детектируемого ионного пучка, и на фиксирование напряжения сканирования u'i, при котором этот максимум достигнут; после этого в случае прихода из блока памяти и сравнения 14 в блок 26 разрешающей команды на работу систем 21 - 25, блок 26 запускает по новому циклу блоки 21-25 в работу в режиме инжекции, детектирования, сканирования, контроля и анализа максимума интенсивности детектируемого электронного пучка.
, что фиксирует блок памяти 14 требуемых углов β0±Δβ0, α0±Δα0 и сравнения их соответственно с углами β и α, то есть, если определенные β и α одновременно удовлетворяют условиям: β0-Δβ0≤β≤β0+Δβ0 и α0-Δα0≤α≤α0+Δα0, то блок 26 включает инжектор 21, детектор 22, систему сканирования 23, систему контроля инжектируемых пучков 24, анализатор максимумов интенсивности детектируемых пучков 25 в режим работы с электронными пучками и при достижении максимума интенсивности детектируемого электронного пучка, что фиксируется блоком 25, блоком 26, инжектор 21, детектор 22, система сканирования 23, система контроля инжектируемых пучков 24, анализатор максимумов интенсивности детектируемых пучков 25 переводятся в режим работы с ионными пучками, при этом начальное напряжение сканирования ионного пучка ui устанавливается в соответствии с тем напряжением сканирования электронного пучка ue, при котором достигнут максимум интенсивности детектируемого электронного пучка. Соответственно анализатор максимумов интенсивности детектируемых пучков 25 дает сигнал в блок 26 на остановку сканирования ионного пучка системой 23, как только достигается максимум интенсивности детектируемого ионного пучка, и на фиксирование напряжения сканирования u'i, при котором этот максимум достигнут; после этого в случае прихода из блока памяти и сравнения 14 в блок 26 разрешающей команды на работу систем 21 - 25, блок 26 запускает по новому циклу блоки 21-25 в работу в режиме инжекции, детектирования, сканирования, контроля и анализа максимума интенсивности детектируемого электронного пучка.
Для скорейшей реализации натурного эксперимента и подтверждения промышленной применимости и эффективности данного способа:
- в качестве инжектора электронов может быть выбрана научная аппаратура (НА) "Источник" или НА "Арфа-Э" [15, 16], установленная на модуле "Квант" ОС "Мир", натурные испытания которых проводятся с 1987 и 1989 г.г. [16] соответственно;
- в качестве инжектора ионов может быть выбрана НА типа "Арфа-И" [12], технологические образцы которой изготовлены и прошли контрольно-технологические испытания по проверке функционирования изделия 31И (непосредственно инжектор ионов) и системы СПУ (система питания и управления) на стенде ОКБ "Факел" и проверочные испытания изделия 31И, и макета СПУ по проверке их совместного функционирования;
- в качестве детектора электронов выбрана аппаратура ЭОС - электронно-оптический спектроанализатор; вакуумные испытания лабораторного образца ЭОС завершены;
- в качестве детектора ионов может быть выбрана аппаратура, разработанная на основе НА "Индикатор", натурные испытания которой проводились и проводятся в настоящее время на ОС "Мир". Данные по аппаратуре "Индикатор" и результаты ее комплексной экспериментальной отработки совместно с импульсным источником плазмы представлены в итоговом отчете по НИР "Кольцо" за 1996 г.;
- в качестве систем сканирования электронов и ионов может быть использована разработанная для лабораторного макета НА "Источник" система сканирования в виде горизонтальных и вертикальных отклоняющих пластин с блоком управления, выдающим на пластины ступенчатое напряжение с частотой, равной частоте посылок импульсов электронного тока, при этом был отработан механизм остановки режима сканирования при приходе импульса от имитатора коллектора электронов;
- в качестве систем контроля инжектируемых электронных и ионных пучков может быть использован тороидальный охватывающий инжектируемый пучок заряженных частиц соленоид;
- системы определения вектора индукции локального магнитного поля Земли  и вектора орбитальной скорости
и вектора орбитальной скорости  функционирует в составе ОС "Мир" и предполагается также их использование на Российском сегменте международной космической станции;
функционирует в составе ОС "Мир" и предполагается также их использование на Российском сегменте международной космической станции;
- блоки формирования команд на включение и выключение электронных и ионных систем, блок обработки анализа информации и выдачи результатов, ЗУ вектора  , блок определения
, блок определения  , блоки определения углов α и β, блок памяти требуемых углов β0±Δβ0, α0±Δα0 и сравнения их соответственно с углами α и β, анализаторы максимумов интенсивности детектируемых пучков электронов и ионов могут быть созданы на основе стандартных схемотехнических решений и освоенных промышленностью цифровых и аналоговых микросхем.
, блоки определения углов α и β, блок памяти требуемых углов β0±Δβ0, α0±Δα0 и сравнения их соответственно с углами α и β, анализаторы максимумов интенсивности детектируемых пучков электронов и ионов могут быть созданы на основе стандартных схемотехнических решений и освоенных промышленностью цифровых и аналоговых микросхем.
Наконец, устройство для осуществления способа по п.3 может быть реализовано на основе плазменных источников, где в ускоряющем промежутке из плазмы могут вырываться как электроны, так и ионы в зависимости от знака разности потенциала между наружней сеткой, находящейся, как правило, при потенциале корпуса и внутренним электродом, в пространстве между которыми сформирована плазма, а также многосеточных детекторов, когда режим детектирования ионов или электронов определяется распределением потенциала между сетками.
Литература
1. Гохберг М.Б., Пилипенко В.А., Похотелов О.А. - докл. АН СССР, 1982, т.268, N 1, стр. 56-58.
2. Ларкина В.И., Наливайко А.В., Гершензон Н.И. и др. - Геомагнетизм и аэрономия, 1983, т.23, N 5, стр. 842-847.
3. Чмырев В.М., Исаев Н.В., Биличенко С.В. и др. - Геомагнетизм и аэрономия, 1986, т.26, N 6, стр. 1020-1022.
4. Биличенко С.В., Инчин А. С., Ким Э.Ф. и др. УНЧ отклик ионосферы на процессы подготовки землетрясений, докл. АН СССР, 1990.
5. Шопотнов Р.В., Троицкая В.А., Довбня Б.В. - докл. АН СССР, 1986, т. 290, N 3, стр. 582-585.
6. Молчанов О. А. О проникновении низкочастотных полей от сейсмических источников в магнитосферу Земли. - Препринт ИЗМИРАН N 56 (810), М., 1988.
7. Пушкин Н.М., Кочеев А.А., Брагин Ю.А. и др. Датчик электрического поля. А. С. 769455 СССР, МКИ3 G 01 R 29/12/БИ. 1980, N 37.
8. Пушкин Н.М., Медников Б.А., Машков А.С., Лапшинова О.В. Измерение фоновых электростатических и переменных электрических полей на внешней поверхности модуля "Квант" орбитальной станции "МИР" // Космич. исслед. 1994, т. 32, N 3, стр. 140-142.
9. Пушкин Н.М., Медников Б.А., Гомилка Л.А. и др. Динамика электрических полей в приповерхностной зоне КА при инжекции плазмы с борта орбитальной станции "МИР" // Космич. исслед. 1997, т. 35, N 4, стр.442-444.
10. Аппаратура "Спектр-Зонд-СМ", техническое описание АШУ2.008.006 ТО.
11. Подгорный И. М. "Активные эксперименты в космосе", М., "Знание", 1994.
12. Obukhov.V.A., Shishkin G.G., Kolesnikov V.K., Serov N.Y. "Electrodynamic and radiophysical meffects of intensive ion beam with ionospheric plasma", 19th TSTS 94-K-10, Yokohama, Japan, 1994.
13. Гохберг М. Б., Моргунов В.А., Похотелов О.А. - Сейсмомагнитные явления, М.: Наука, 1988.
14. Редерер X. "Динамика радиации, захваченной геомагнитным полем", М., "Мир", 1972.
15. Снедков Б. А. /в соавт./. Система "Источник" для инжекции и приема ускоренного модулированного электронного пучка, - "Приборы и техника эксперимента" N 3, 1988, стр. 255.
16. Исследования по физике околоземного космического пространства на орбитальной станции "Мир", этапный отчет П 31841 - 782.
17. RU, С1, патент N 2093861 от 20.10.97.


Изобретение относится к области геофизики и космической физики и может быть использовано для измерения электрических полей в ионосфере Земли с помощью научной аппаратуры, установленной на борту космического аппарата (КА). Технический результат: определение постоянной составляющей напряженности электрического поля в направлении вектора  и в плоскости
и в плоскости  Сущность изобретения: инжектируют импульсный электронный пучок заданной энергии, сканируют его в плоскости П, проходящей через вектор
Сущность изобретения: инжектируют импульсный электронный пучок заданной энергии, сканируют его в плоскости П, проходящей через вектор  и геометрическую ось инжектора
и геометрическую ось инжектора  определяют направление
определяют направление  инжекции, в котором достигается максимум интенсивности электронов. Затем инжектируемый ионный пучок сканируют в плоскости П вблизи направления
инжекции, в котором достигается максимум интенсивности электронов. Затем инжектируемый ионный пучок сканируют в плоскости П вблизи направления  и определяют направление
и определяют направление  инжекции ионного пучка, в котором достигается максимум интенсивности ионов. Определяют угол Δϕ между векторами
инжекции ионного пучка, в котором достигается максимум интенсивности ионов. Определяют угол Δϕ между векторами  как функцию текущего времени, и на основании этого вычисляют величины постоянной составляющей Еzo, амплитуду ЕzA и частоту fz переменной составляющей электрического поля в направлении вектора
как функцию текущего времени, и на основании этого вычисляют величины постоянной составляющей Еzo, амплитуду ЕzA и частоту fz переменной составляющей электрического поля в направлении вектора  а по текущей временной зависимости величины максимума интенсивности приходящего в детектор ионного пучка, максимальной и минимальной величине электрического дрейфа ионов в плоскости
а по текущей временной зависимости величины максимума интенсивности приходящего в детектор ионного пучка, максимальной и минимальной величине электрического дрейфа ионов в плоскости  определяют величину постоянной составляющей EQ, амплитуду EQA и частоту fQ переменной составляющей электрического поля, лежащей в плоскости
определяют величину постоянной составляющей EQ, амплитуду EQA и частоту fQ переменной составляющей электрического поля, лежащей в плоскости  Устройство для осуществления способа определения параметров ионосферы Земли, содержащее размещенные на борту космического аппарата (КА) инжектор и детектор ионов, блок формирования команд на включение и выключение ионных систем, систему определения вектора индукции локального магнитного поля Земли
Устройство для осуществления способа определения параметров ионосферы Земли, содержащее размещенные на борту космического аппарата (КА) инжектор и детектор ионов, блок формирования команд на включение и выключение ионных систем, систему определения вектора индукции локального магнитного поля Земли  систему определения вектора орбитальной скорости
систему определения вектора орбитальной скорости  блок определения
блок определения  - составляющей орбитальной скорости на плоскость
- составляющей орбитальной скорости на плоскость  инжектор и детектор электронов, системы сканирования ионов и электронов; блок формирования команд на включение и выключение электронных систем, анализаторы максимумов интенсивности детектируемых пучков ионов и электронов; системы контроля инжектируемых ионного и электронного пучков, блок обработки, анализа информации и выдачи результатов, запоминающее устройство (ЗУ) вектора
инжектор и детектор электронов, системы сканирования ионов и электронов; блок формирования команд на включение и выключение электронных систем, анализаторы максимумов интенсивности детектируемых пучков ионов и электронов; системы контроля инжектируемых ионного и электронного пучков, блок обработки, анализа информации и выдачи результатов, запоминающее устройство (ЗУ) вектора  - геометрической оси инжектора электронов; блок определения
- геометрической оси инжектора электронов; блок определения  - составляющей орбитальной скорости на плоскость
- составляющей орбитальной скорости на плоскость  блок определения угла β между векторами
блок определения угла β между векторами  блок определения угла α между векторами
блок определения угла α между векторами  - составляющей вектора
- составляющей вектора  на плоскость Q, блок памяти требуемых углов β0 ± Δβ0, α0 ± Δα0 и сравнения их соответственно с углами β и α. 2 с. и 1 з.п. ф-лы, 5 табл., 7 ил.
на плоскость Q, блок памяти требуемых углов β0 ± Δβ0, α0 ± Δα0 и сравнения их соответственно с углами β и α. 2 с. и 1 з.п. ф-лы, 5 табл., 7 ил.
 квазипостоянного магнитного поля Земли, последующей инжекции ортогонально этому направлению импульсного пучка ионов заданной энергии с определенной частотой следования импульсов ионов fимп, при этом определяют орбитальную скорость КА
квазипостоянного магнитного поля Земли, последующей инжекции ортогонально этому направлению импульсного пучка ионов заданной энергии с определенной частотой следования импульсов ионов fимп, при этом определяют орбитальную скорость КА  вычисляют составляющую орбитальной скорости
вычисляют составляющую орбитальной скорости  на плоскость
на плоскость  отличающийся тем, что инжекцию пучка ионов плоскости Q производят под определенным углом α0 к вектору
отличающийся тем, что инжекцию пучка ионов плоскости Q производят под определенным углом α0 к вектору  при этом перед инжекцией ионного пучка инжектируют импульсный электронный пучок заданной энергии, сканируют его в плоскости П, проходящей через вектор
при этом перед инжекцией ионного пучка инжектируют импульсный электронный пучок заданной энергии, сканируют его в плоскости П, проходящей через вектор  и геометрическую ось инжектора
и геометрическую ось инжектора  регистрируют на детекторе и определяют направление
регистрируют на детекторе и определяют направление  инжекции, в котором достигается максимум интенсивности электронов, принимаемых детектором, затем инжектируемый ионный пучок сканируют в плоскости П вблизи направления
инжекции, в котором достигается максимум интенсивности электронов, принимаемых детектором, затем инжектируемый ионный пучок сканируют в плоскости П вблизи направления  и определяют направление
и определяют направление  инжекции ионного пучка, в котором достигается максимум интенсивности ионов, принимаемых детектором, далее определяют угол Δϕ между векторами
инжекции ионного пучка, в котором достигается максимум интенсивности ионов, принимаемых детектором, далее определяют угол Δϕ между векторами  как функцию текущего времени, и на основании этого вычисляют величины постоянной составляющей Еzo, амплитуду ЕzA и частоту fz переменной составляющей электрического поля в направлении вектора
как функцию текущего времени, и на основании этого вычисляют величины постоянной составляющей Еzo, амплитуду ЕzA и частоту fz переменной составляющей электрического поля в направлении вектора  а по текущей временной зависимости величины максимума интенсивности приходящего в детектор ионного пучка, максимальной и минимальной величине электрического дрейфа ионов в плоскости
а по текущей временной зависимости величины максимума интенсивности приходящего в детектор ионного пучка, максимальной и минимальной величине электрического дрейфа ионов в плоскости  определяют величину постоянной составляющей ЕQ, амплитуду ЕQA и частоту fQ переменной составляющей электрического поля, лежащей в плоскости
определяют величину постоянной составляющей ЕQ, амплитуду ЕQA и частоту fQ переменной составляющей электрического поля, лежащей в плоскости 
2. Устройство для осуществления способа определения параметров ионосферы Земли, содержащее размещенные на борту космического аппарата (КА) инжектор и детектор ионов, блок формирования команд на включение и выключение ионных систем, систему определения вектора индукции локального магнитного поля Земли  систему определения вектора орбитальной скорости
систему определения вектора орбитальной скорости  блок определения
блок определения  - составляющей орбитальной скорости на плоскость
- составляющей орбитальной скорости на плоскость  отличающееся тем, что в устройство введены инжектор и детектор электронов, системы сканирования ионов и электронов, блок формирования команд на включение и выключение электронных систем, анализаторы максимумов интенсивности детектируемых пучков ионов и электронов, системы контроля инжектируемых ионного и электронного пучков, блок обработки, анализа информации и выдачи результатов, запоминающее устройство (ЗУ) вектора
отличающееся тем, что в устройство введены инжектор и детектор электронов, системы сканирования ионов и электронов, блок формирования команд на включение и выключение электронных систем, анализаторы максимумов интенсивности детектируемых пучков ионов и электронов, системы контроля инжектируемых ионного и электронного пучков, блок обработки, анализа информации и выдачи результатов, запоминающее устройство (ЗУ) вектора  - геометрической оси инжектора электронов, блок определения
- геометрической оси инжектора электронов, блок определения  - составляющей орбитальной скорости на плоскость
- составляющей орбитальной скорости на плоскость  блок определения угла β между векторами
блок определения угла β между векторами  блок определения угла α между векторами
блок определения угла α между векторами  - составляющей вектора
- составляющей вектора  на плоскость Q, блок памяти требуемых углов β0 ± Δβ0, α0 ± Δα0 и сравнения их соответственно с углами β и α, при этом входы и выходы блока формирования команд на включение и выключение электронных систем соответственно подключены к выходам и входам инжектора электронов, детектора электронов, системы сканирования электронов, анализатора максимума интенсивности детектируемого пучка электронов, системы контроля инжектируемого пучка электронов, а входы и выходы блока формирования команд на включение и выключение ионных систем соответственно подключены к выходам и входам инжектора ионов, детектора ионов, системы сканирования ионов, анализатора максимума интенсивности детектируемого пучка ионов, системы контроля инжектируемого пучка ионов, выходы блока формирования команд на включение и выключение ионных систем и анализатора максимума интенсивности детектируемого пучка ионов подключены ко входам блока формирования команд на включение и выключение электронных систем, а выходы анализатора максимума интенсивности детектируемого пучка электронов подключены ко входам блока формирования команд на включение и выключение ионных систем и системы сканирования ионов, а выходы детекторов электронов и ионов подключены ко входам анализаторов максимумов интенсивности детектируемых пучков электронов и ионов соответственно; выходы системы определения вектора индукции локального магнитного поля Земли
на плоскость Q, блок памяти требуемых углов β0 ± Δβ0, α0 ± Δα0 и сравнения их соответственно с углами β и α, при этом входы и выходы блока формирования команд на включение и выключение электронных систем соответственно подключены к выходам и входам инжектора электронов, детектора электронов, системы сканирования электронов, анализатора максимума интенсивности детектируемого пучка электронов, системы контроля инжектируемого пучка электронов, а входы и выходы блока формирования команд на включение и выключение ионных систем соответственно подключены к выходам и входам инжектора ионов, детектора ионов, системы сканирования ионов, анализатора максимума интенсивности детектируемого пучка ионов, системы контроля инжектируемого пучка ионов, выходы блока формирования команд на включение и выключение ионных систем и анализатора максимума интенсивности детектируемого пучка ионов подключены ко входам блока формирования команд на включение и выключение электронных систем, а выходы анализатора максимума интенсивности детектируемого пучка электронов подключены ко входам блока формирования команд на включение и выключение ионных систем и системы сканирования ионов, а выходы детекторов электронов и ионов подключены ко входам анализаторов максимумов интенсивности детектируемых пучков электронов и ионов соответственно; выходы системы определения вектора индукции локального магнитного поля Земли  и системы определения вектора орбитальной скорости
и системы определения вектора орбитальной скорости  подключены ко входам блока определения
подключены ко входам блока определения  при этом системы определения вектора индукции локального магнитного поля Земли
при этом системы определения вектора индукции локального магнитного поля Земли  и выход ЗУ вектора
и выход ЗУ вектора  подсоединены к входам блока определения угла β между векторами
подсоединены к входам блока определения угла β между векторами  выход которого подсоединен к входу блока памяти требуемых углом β0 ± Δβ0, α0 ± Δα0 и сравнения их соответственно с углами β и α, ко входу которого подсоединен выход блока определения угла α между векторами
выход которого подсоединен к входу блока памяти требуемых углом β0 ± Δβ0, α0 ± Δα0 и сравнения их соответственно с углами β и α, ко входу которого подсоединен выход блока определения угла α между векторами  при этом к входам блока определения угла α между векторами
при этом к входам блока определения угла α между векторами  подсоединены выходы ЗУ и блока определения
подсоединены выходы ЗУ и блока определения  составляющей орбитальной скорости на плоскость
составляющей орбитальной скорости на плоскость  выход блока памяти подсоединен к входу блока формирования команд на включение и выключение электронных систем, и выходы блоков формирования команд на включение и выключение электронных и ионных систем, системы определения вектора индукции локального магнитного поля Земли
выход блока памяти подсоединен к входу блока формирования команд на включение и выключение электронных систем, и выходы блоков формирования команд на включение и выключение электронных и ионных систем, системы определения вектора индукции локального магнитного поля Земли  системы определения вектора орбитальной скорости
системы определения вектора орбитальной скорости  ЗУ вектора
ЗУ вектора  блока определения
блока определения  блока определения угла β между векторами
блока определения угла β между векторами  блока определения угла α между векторами
блока определения угла α между векторами  блока памяти требуемых углов β0 ± Δβ0, α0 ± Δα0 и сравнения их соответственно с углами β и α, подключены к входам блока обработки, анализа информации и выдачи результатов.
блока памяти требуемых углов β0 ± Δβ0, α0 ± Δα0 и сравнения их соответственно с углами β и α, подключены к входам блока обработки, анализа информации и выдачи результатов.
| СПОСОБ ОПРЕДЕЛЕНИЯ ИНДУКЦИИ МАГНИТНОГО ПОЛЯ В ИОНОСФЕРЕ ЗЕМЛИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2093861C1 |
| Датчик электростатического поля | 1978 |
|
SU769455A1 |
| Экономайзер | 0 |
|
SU94A1 |

