Изобретение имеет отношение к устройству для механизированного перемещения подвижных проволок, расположенных с противоположных сторон ряда растений, в частности виноградных лоз, и способу работы упомянутого устройства.
В сельском хозяйстве, в частности в виноградарстве, хорошо известны опорные конструкции для растений, содержащие ряды столбов, заглубленных в землю, с образованием рядов шпалер для лозы. Столбы расположены на некотором расстоянии один от другого, и выше уровня земли они соединены между собой горизонтальной проволокой, называемой "несущей проволокой" и закрепленной на упомянутых столбах на соответствующей высоте над землей. На двух расположенных в концах каждого ряда столбах, называемых "крайними столбами", также закреплена по меньшей мере одна пара параллельных проволок, которые закрепляются на соответствующих сторонах каждого столба в ряду. Эти проволоки обычно называют "поддерживающими проволоками" или "подвижными проволоками", поскольку на протяжении различных фаз развития растений их перемещают на различные высоты над землей, чтобы удерживать и перемещать растущие части растений в соответствии с требуемой конфигурацией. На промежуточных столбах ряда, расположенных между крайними столбами, выполнены соответствующие опоры, или крюки, для временного крепления подвижных проволок на одной или более высотах над землей.
Зимой, когда ростки виноградной лозы очень коротки или полностью отсутствуют, эти пары подвижных проволок размещены в положении ближе к земле. В весенний и летний сезоны, когда растения достигают полного развития, каждую пару подвижных проволок постепенно перемещают в положение дальше от земли в направлении, перпендикулярном ее поверхности, для удерживания листвы между проволоками каждой пары, тем самым управляя ее ростом в соответствии с требуемой конфигурацией.
В соответствии с известным способом по меньшей мере один из концов подвижных проволок прикреплен к крайнему столбу в ряду металлическими цепями, снабженными пригодным присоединительным устройством или пригодными зажимами, которые используются для прикрепления одного из звеньев цепи к столбу. При использовании крепления, соответствующего этому варианту осуществления настоящего изобретения, когда необходимо переместить каждую подвижную проволоку в другое положение, эта проволока должна быть сначала ослаблена путем отсоединения соответствующей цепи от столба, последующего переноса подвижной проволоки до требуемой высоты и окончательного прикрепления цепи снова к столбу. Эти ручные операции, которые являются довольно сложными и требующими затраты усилий, требуют участия по меньшей мере двух исполнителей, один из которых удерживает цепь, сохраняя натяжку подвижной проволоки, а по меньшей мере один другой исполнитель перемещает подвижную проволоку в новое положение. Очевидно (особенно принимая во внимание то, что на возделанной плантации ряды многочисленны и имеют значительную длину), что такая конструкция крепления подвижных проволок на крайнем столбе ряда лоз требует значительных затрат физического труда, относительно длительного времени выполнения работ и значительных затрат средств.
В качестве частичного усовершенствования способа крепления с использованием цепей в международной патентной заявке WO 2005/048691 описано упругое компенсационное устройство, которое обеспечивает возможность для одного исполнителя выполнять вертикальный перенос каждой подвижной проволоки. В соответствии с этим вариантом осуществления упомянутого изобретения по меньшей мере один конец каждой подвижной проволоки прикреплен к первому концу упругого компенсационного устройства, неподвижно закрепленного на крайнем столбе в ряду. Несмотря на то, что объем работ, выполняемых исполнителем вручную, значительно снижен по сравнению с обработкой рядов растений, у которых подвижные проволоки прикреплены к крайним столбам цепями, объем этой работы остается значительным, принимая во внимание то, что для каждой из двух сторон каждого ряда исполнителю необходимо освободить подвижную проволоку, ранее размещенную на первой высоте над уровнем земли, и снова прикрепить ее на второй высоте, отличающейся от первой. В этой ситуации при наличии многочисленных рядов растений значительной длины ручные операции перемещения подвижных проволок также могут иметь довольно большую трудоемкость.
Современные устройства, предложенные для крепления подвижных проволок в ряду растений, содержат одну или несколько скользящую(-их) направляющую(-их), размещенную(-ых) вблизи крайних столбов каждого ряда по существу вертикально относительно земли. На этих направляющих установлены подвижные элементы, на которых неподвижно закреплены подвижные проволоки. Один из примеров такой конструкции приведен в патентной заявке Италии ITPN2010A000023. При такой конфигурации перемещение подвижных проволок еще более упрощено по сравнению с устройством, описанным выше, однако это перемещение по-прежнему характеризуется ручными операциями, которые предусматривают возможность освобождения подвижных проволок, ранее размещенных на первой высоте над землей, и их последующее размещение на второй высоте, отличающейся от первой. Исходя из этого, понятно, что и в этой ситуации ручные операции, выполняемые для переноса подвижных проволок, также остаются трудоемкими.
Также известны автоматические машины, которые могут изменять положение подвижных проволок для рядов растений, преимущественно виноградных лоз, при помощи вращающихся элементов. Один из примеров таких машин описан в европейском патенте ЕР 0318406. Однако машины этого типа имеют существенный недостаток, состоящий в том, что значительные повреждения, которые вращающиеся элементы могут нанести частям растений, отрицательно влияют на урожай плодовых культур.
Исходя из этого, целью настоящего изобретения является создание устройства, предназначенного для механического перемещения подвижных проволок в ряду растений, в частности, виноградных лоз, и создание способа работы упомянутого устройства.
В рамках указанной выше цели одной из задач настоящего изобретения является создание устройства для механизированного перемещения подвижных проволок в ряду растений, которое снижает до минимума необходимость выполнения ручных операций.
Другой задачей настоящего изобретения является создание устройства для механизированного перемещения подвижных проволок в ряду растений как в полностью автоматическом, так и в полуавтоматическом режиме.
Еще одной задачей настоящего изобретения является создание устройства для механизированного перемещения подвижных проволок в ряду растений, простого в изготовлении и установке на обычное сельскохозяйственное транспортное средство, например, такое как трактор.
Другой не менее важной задачей настоящего изобретения является создание устройства для механизированного перемещения подвижных проволок в ряду растений, которое сохраняет состояние листвы во время выполнения операций изменения положения подвижных проволок.
Еще одной задачей настоящего изобретения является создание способа работы упомянутого устройства, осуществимого как в полностью автоматическом, так и полуавтоматическом режиме.
Другой задачей настоящего изобретения является создание способа работы упомянутого устройства, которое является надежным и может легко быть приспособлено к рядам растений с любым количеством подвижных проволок и к различным вариантам их взаимного расположения для закрепления упомянутых подвижных проволок на крайних столбах.
Указанная выше цель достигнута и поставленные задачи решены путем создания устройства для механизированного перемещения подвижных проволок в ряду растений, имеющего признаки, сформулированные в п. 1 формулы изобретения, и способа работы упомянутого устройства по п. 12. Особенности и преимущества настоящего изобретения понятны из последующего описания, приведенного в качестве не ограничивающего объем изобретения примера, со ссылками на прилагаемые чертежи, на которых:
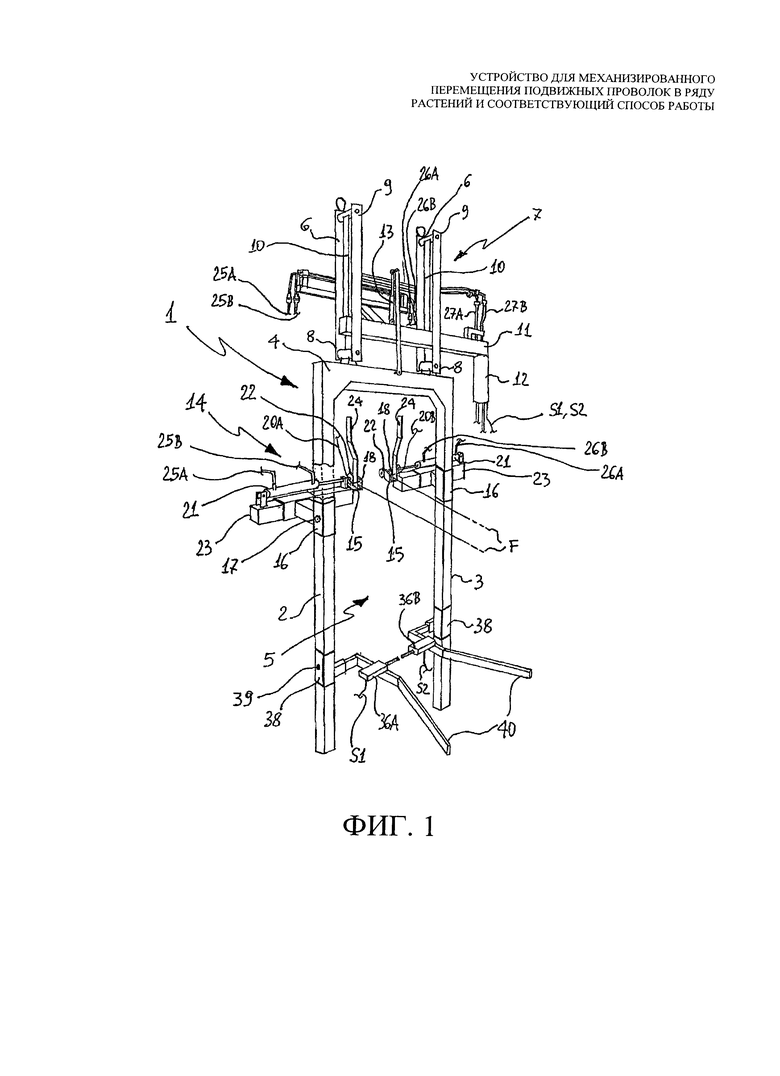
- на Фиг. 1 показан вид в перспективе с местными разрезами первого варианта исполнения устройства, соответствующего настоящему изобретению;
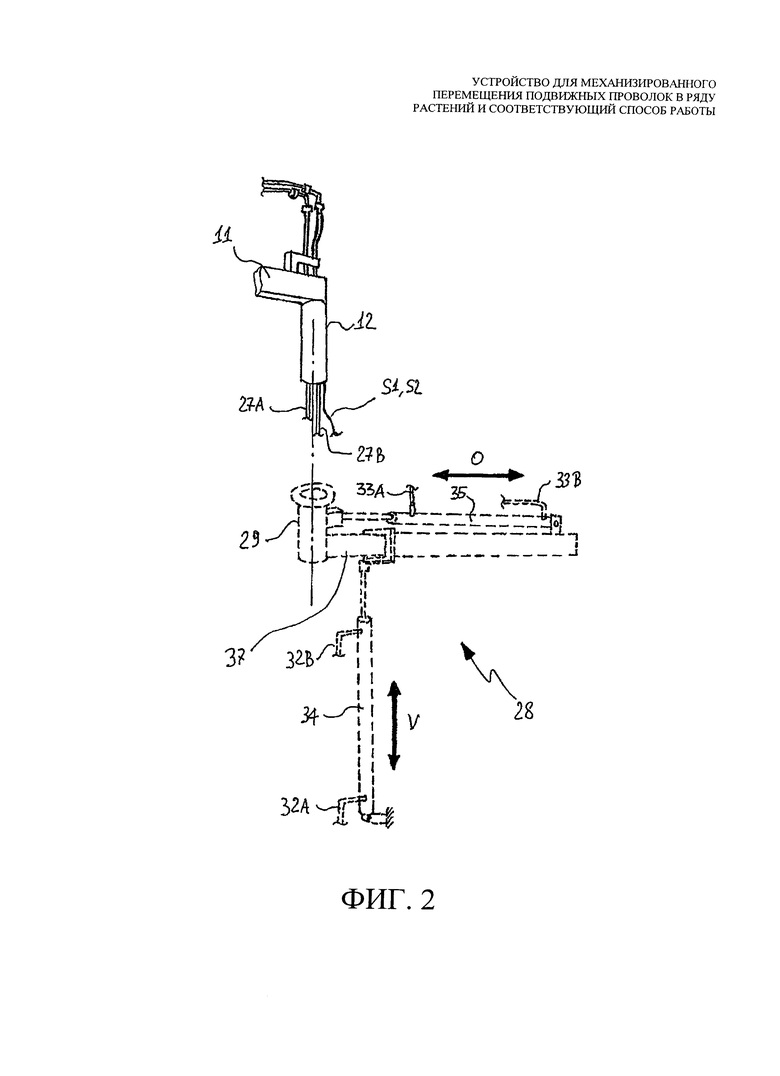
- на Фиг. 2 показаны возможные присоединительные средства для присоединения устройства, соответствующего настоящему изобретению, к сельскохозяйственному транспортному средству;
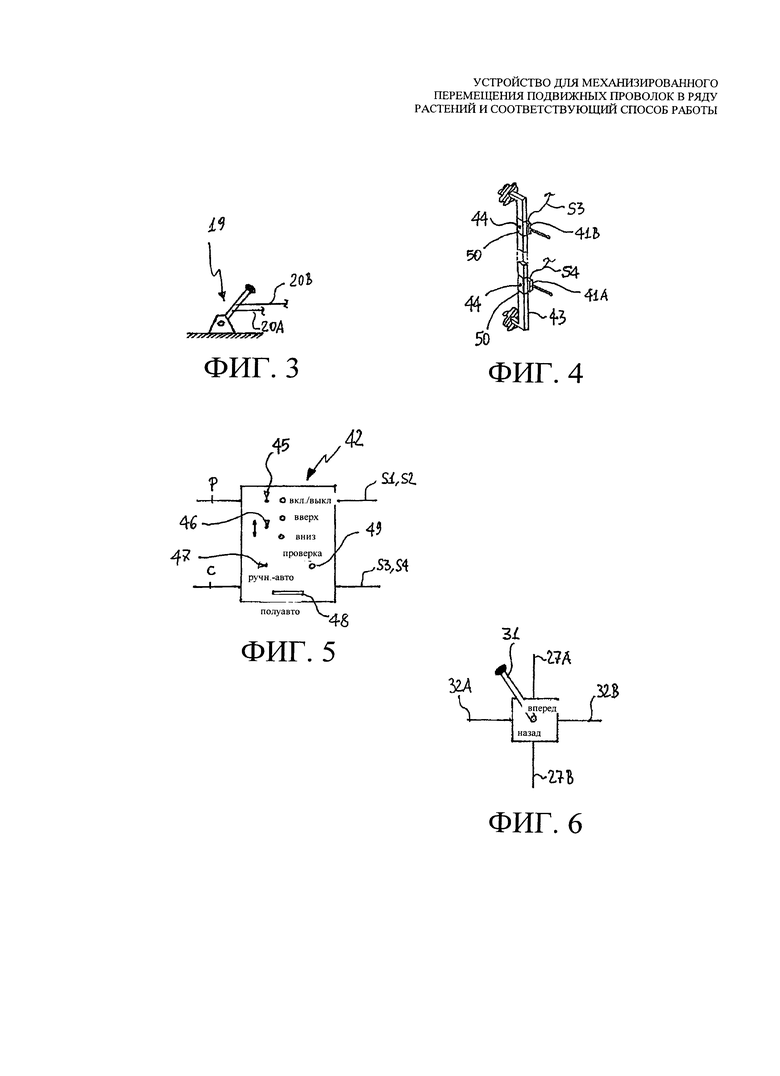
- на Фиг. 3 показан рычаг для управления средствами для закрепления подвижных проволок на захватных элементах устройства, показанного на Фиг. 1;
- на Фиг. 4 показаны чувствительные средства для управления устройством, соответствующим настоящему изобретению;
- на Фиг. 5 показан пульт управления для управления устройством, показанным на Фиг. 1;
- на Фиг. 6 показан гидравлический клапан для управления направлениями движения в цикле перемещения подвижной проволоки;
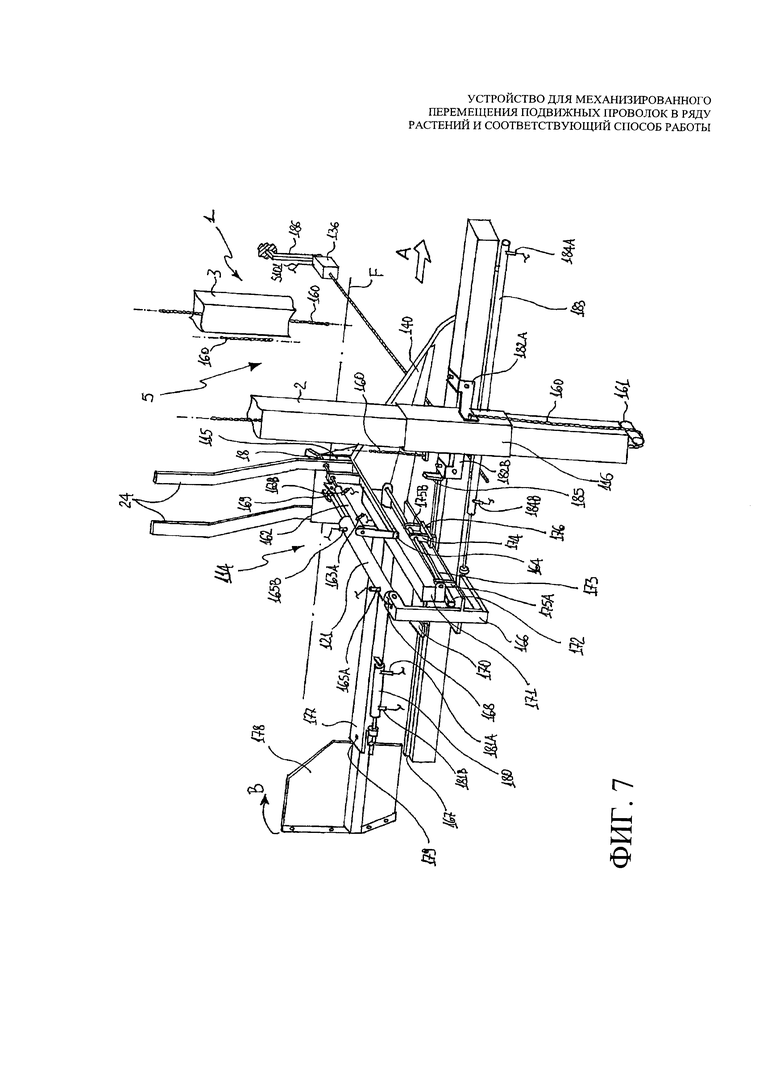
- на Фиг. 7 показан местный вид второго варианта исполнения устройства, соответствующего настоящему изобретению;
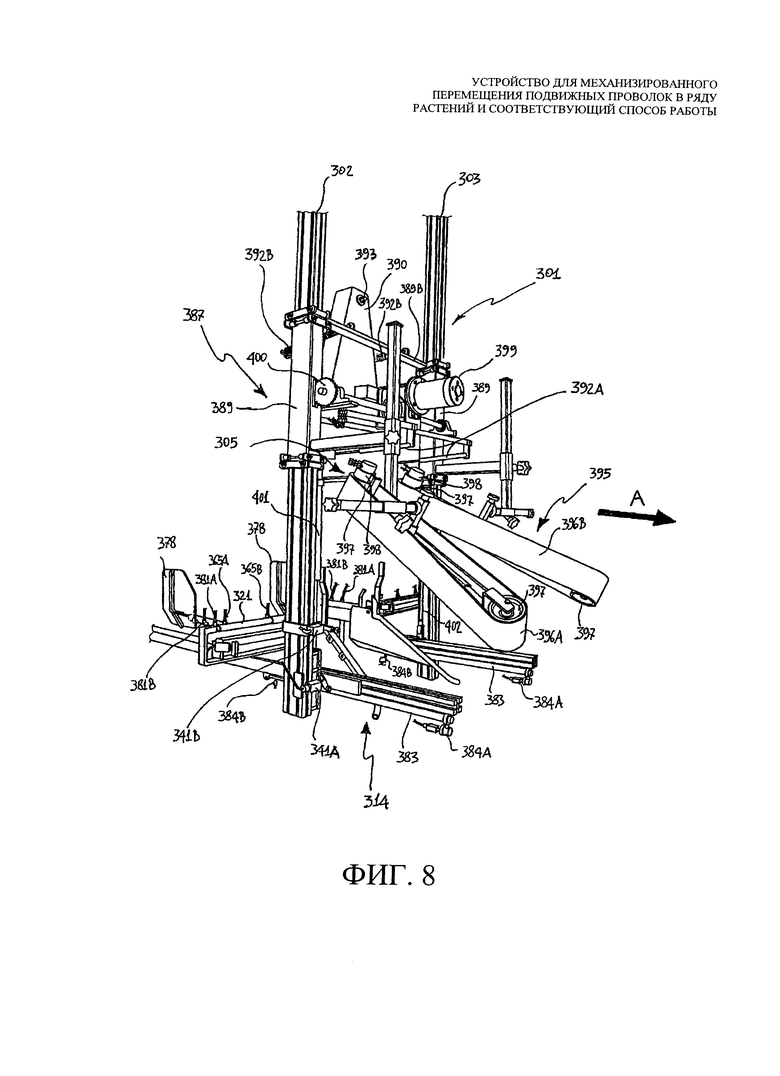
- на Фиг. 8 показан местный вид в перспективе спереди третьего варианта исполнения устройства, соответствующего настоящему изобретению;
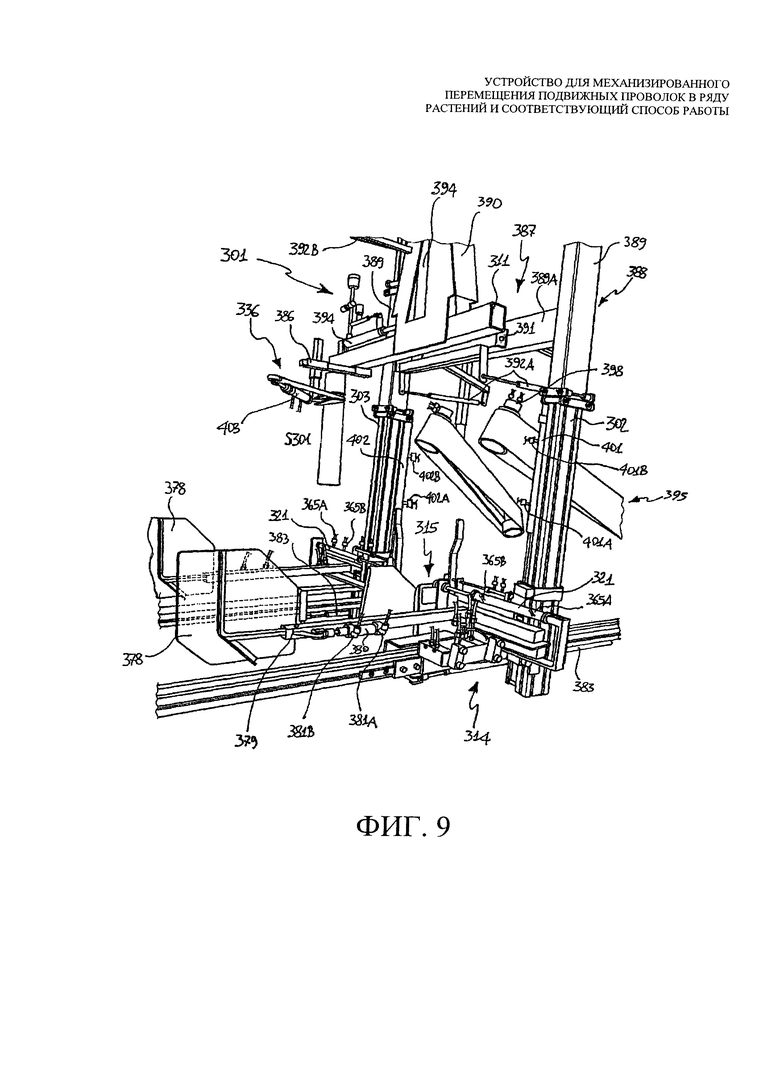
- на Фиг. 9 показан вид сзади в перспективе устройства, показанного на Фиг. 8.
Как показано на Фиг. 1, первый вариант исполнения устройства для механического перемещения подвижных проволок, расположенных с противоположных сторон ряда растений, содержит раму 1, образованную парой параллельных стоек 2, 3, соединенных поперечным элементом 4 так, что образуется пространство 5, открытое снизу и ограниченное сверху поперечным элементом 4, которая может быть выполнена так, чтобы без существенных помех перемещаться вдоль ряда растений. На поперечном элементе 4 шарнирно закреплены первые концы 8 балок 6 поворотной четырехугольной рамы 7. Вторые концы 9 балок 6 шарнирно закреплены на кронштейнах 10, прикрепленных к опоре 11 так, что вся рама 1 установлена на консольной опоре 11. Последняя снабжена соединительным элементом 12, выполненным, например, в виде трубчатого элемента, который, как показано на Фиг. 2, может быть с возможностью поворачивания вставлен в основание 29, выполненное в опоре 28, которая представляет собой часть общего оборудования сельскохозяйственного транспортного средства, например, трактора, не показанного на фигурах. Опора 28 показана на Фиг. 2 пунктирными линиями, поскольку она является необязательной частью устройства, соответствующего настоящему изобретению.
Предпочтительно поворотная четырехугольная рама 7 снабжена амортизатором 13, например, гидравлическим или пневматическим амортизатором, расположенным между рамой 1 и опорой 11, так что качания рамы 1 относительно опоры 11 эффективно и быстро демпфируются, и рама 1 удерживается в положении, перпендикулярном обработанной земле. Это предотвращает повторяющиеся удары стойками 2 и 3 по частям растений, находящимся внутри пространства 5 во время выполнения операций по перемещению подвижных проволок F с первой высоты на вторую высоту.
Рама 1 снабжена подвижными средствами 14, которые содержат пару расположенных один напротив другого захватных элементов 15, в каждый из которых с возможностью скольжения помещена подвижная проволока F ряда растений. Пригодные направляющие элементы, например, такие как шкивы 22, способствуют скольжению подвижных проволок F, закрепленных в захватных элементах 15, тогда как для направления подвижных проволок F к захватным элементам 15 выполнены подводящие поверхности 24.
Точнее, каждый захватный элемент 15 установлен на одной из стоек 2, 3 с помощью ползуна 16, скользящего по стойке 2, 3, которая служит в качестве направляющей. Положение захватного элемента 15 на стойке 2, 3, на которой он установлен, фиксируется блокированием скользящего движения ползуна 16 по соответствующей стойке 2, 3 с помощью стопорных средств 17, представляющих собой, например, шпильки или винты. Как более подробно описано ниже, в этом первом варианте осуществления настоящего изобретения позиционирование захватных элементов 15 на соответствующих стойках 2 и 3 настраивается в начале выполнения операций перемещения подвижных проволок F и сохраняется постоянным в процессе выполнения этих операций. Перемещение в направлении, перпендикулярном земле, практически выполняется путем подъема/опускания всей рамы 1 при помощи сельскохозяйственного транспортного средства, на котором установлено устройство, соответствующее настоящему изобретению.
Захватные элементы 15 снабжены стопорными средствами 18, которые предотвращают освобождение подвижных проволок F из захватных элементов 15, что обеспечивает некоторые преимущества. Стопорные средства 18 могут представлять собой шпильку, которую устанавливают в прорезь, в которой с возможностью скольжения закреплены подвижные проволоки F. Каждым стопорным средством 18 можно управлять, например, рычагом 19 управления, показанным на Фиг. 3, который воздействует на тросы 20А и 20В, соединенные со стопорными средствами 18. Рычаг 19 управления может быть закреплен на сельскохозяйственном транспортном средстве, на котором установлено или собрано устройство в соответствии с первым вариантом осуществления настоящего изобретения. Разумеется, вместо рычага могут быть использованы и средства механического или гидравлического управления других известных видов. Другой пример элементов управления описан ниже в отношении второго варианта осуществления настоящего изобретения.
Подвижные средства 14 содержат приводные средства 21, которые представляют собой, например, гидравлические поршни, предназначенные для перемещения захватных элементов 15 из первого положения, в котором последние раздвинуты на некоторое расстояние (как показано на Фиг. 1), и из второго положения, в котором захватные элементы 15 придвинуты ближе один к другому. В первом положении захватных элементов 15 подвижные проволоки F находятся на максимальном расстоянии одна от другой, тогда как во втором положении захватных элементов 15 подвижные проволоки F находятся на минимальном расстоянии или даже в соприкосновении одна с другой. Для обеспечения возможности перемещения захватных элементов 15 под действием приводных средств 21 каждый ползун 16 снабжен телескопической конструкцией 23, простирающейся в направлении, по существу перпендикулярном основному направлению стоек 2 и 3.
Работа приводных средств 21, которая включает перемещение вдоль по существу горизонтальной оси, т.е. параллельно обработанной земле, управляется гидравлической системой. В частности, две пары трубопроводов 25А, 25В и 26А, 26В находятся в гидравлической связи с другой парой трубопроводов 27А, 27В. Трубопроводы 27А, 27В соединены с гидравлической системой, имеющейся в качестве стандартного оборудования на любом сельскохозяйственном транспортном средстве известных типов, не показанном на фигурах, при помощи схематически показанного на Фиг.6 распределительного клапана 30, управляемого рычагом 31. К клапану 30 фактически также присоединены два трубопровода 32А, 32В, которые входят в состав гидравлической системы сельскохозяйственного транспортного средства и подают рабочую текучую среду на привод 34 (Фиг. 2) для перемещения основания 29 опоры 28 в направлении "V", по существу перпендикулярном обработанной земле. С помощью рычага 31 клапана 30 возможно управление направлением перемещения (схематически показанном на Фиг.6 словами "ВПЕРЕД" и "НАЗАД") приводного средства 21, а следовательно, и перемещение подвижных проволок F. Благодаря клапану 30, который обеспечивает гидравлическую связь трубопроводов 27А, 27В гидравлической системы устройства по первому варианту осуществления настоящего изобретения с трубопроводами 32А, 32В гидравлической системы сельскохозяйственного транспортного средства, перемещения приводных средств 21 и привода 34 (Фиг. 2) являются последовательными и синхронизированными. Фактически, когда захватные элементы 15 достигают своего второго положения, т.е. когда они находятся один вблизи другого, давление текучей среды, циркулирующей в трубопроводах 27А, 27В, повышается и приводит в действие привод 34. Таким образом, нет необходимости в наличии специальных электрических/электронных элементов управления для согласования перемещений захватных элементов 15 вдоль двух взаимно перпендикулярных осей, одна из которых по существу параллельна обработанной земле (перемещение под действием приводных средств 21), а другая по существу перпендикулярна ее поверхности (перемещение всей рамы 1 под действием привода 34 сельскохозяйственного транспортного средства).
Как показано на Фиг. 2, опора 28 снабжена дополнительным приводом 35, питаемым двумя трубопроводами 33А и 33В гидравлической системы сельскохозяйственного транспортного средства. Привод 35, который аналогично приводу 34 может содержать гидравлический поршень, предназначен для перемещения основания 29 опоры 28, а следовательно, и всей рамы 1 устройства, соответствующего настоящему изобретению, в направлении, параллельном земле, которое обозначено "О" на Фиг. 2. Для этого основание 29 выполнено как единое целое с телескопической балкой 37,
Как показано на Фиг. 1 и Фиг. 4, для обеспечения автоматической работы устройства в соответствии с первым вариантом осуществления настоящего изобретения устройство может быть снабжено чувствительными средствами 36А, 36В, установленными соответственно на стойках 2, 3 рамы 1, предназначенными для обнаружения наличия столба в ряду растений. Датчики 36А, 36В по существу обнаруживают момент, когда рама 1 находится непосредственно перед попаданием столба ряда растений в пространство 5. Чувствительные средства 36А, 36В установлены на стойках 2, 3 со стороны, противоположной захватным элементам 15, что обеспечивает преимущество, заключающееся в том, что приближающийся столб в ряду может быть обнаружен перед тем, как захватные элементы 15 достигнут его или пройдут немного далее него. Чувствительные средства 36А, 36В могут быть установлены подобно тому, как описано для захватных элементов 15, или с помощью ползунов 38, установленных с возможностью скольжения на стойках 2, 3. Стопорные средства 39, представляющие собой, например, шпильки или винты, делают возможной фиксацию чувствительных средств 36А, 36 В на соответствующих стойках 2 и 3. Направляющие поверхности 40 предназначены для направления частей растений в заранее заданные положения, а сигнальные линии S1 и S2 соединяют чувствительные средства 36А, 36В с пультом управления 42, схематически показанным на Фиг. 5, для осуществления управления устройством. Сигнальные линии S1 и S2 совместно с трубопроводами 27А, 27В гидравлической системы предназначены для подсоединения соответственно к пульту управления 42 и к гидравлической системе сельскохозяйственного транспортного средства через полость соединительного элемента 12.
Как показано на Фиг.4, дополнительные чувствительные средства 41А и 41В предназначены для определения положения захватных элементов 15 путем определения положения рамы 1 в направлении, перпендикулярном земле, т.е. в вертикальном направлении. Чувствительные средства 41А и 41В могут быть установлены с возможностью скольжения один за другим на необходимом расстоянии на штанге 43 при помощи ползунов 50, что обеспечивает некоторые преимущества. Штанга 43 расположена в зоне действия телескопической балки 37 опоры 28 в направлении, параллельном вертикальному направлению "V", показанному на Фиг. 2. Положение чувствительных средств 41А и 41В на штанге может быть отрегулировано с использованием стопорных средств 44, представляющих собой, например, шпильки или винты. В частности, штанга 43 может также быть установлена на сельскохозяйственном транспортном средстве, на которое навешено или в которое встроено устройство, соответствующее настоящему изобретению. Расстояние между чувствительными средствами 41А и 41В определяет точки начала и прекращения перемещения телескопической балки 37 в направлении "V", показанном на Фиг. 2, а следовательно и перемещения основания 29 и всей рамы 1.
Чувствительные средства 41А и 41В связаны с пультом управления 42 (Фиг. 5) через сигнальные линии S3, S4 так, чтобы осуществлять с ним обмен сигналами.
Как показано на Фиг. 5, пульт управления 42, устанавливаемый на сельскохозяйственное транспортное средство, на которое навешено или в которое встроено устройство, соответствующее первому варианту осуществления настоящего изобретения, дополнительно к сигнальным линиям S1, S2 и S3, S4 также электрически соединен с источником энергии по электрической линии "Р" и с соответствующими электрическими устройствами управления, которыми снабжена гидравлическая система сельскохозяйственного транспортного средства для осуществления управления приводом 34 (Фиг. 2) и приводными средствами 21 (Фиг. 1), по электрической линии "С".
Пульт управления 42 предпочтительно снабжен первым основным выключателем 45 "ВКЛ/ВЫКЛ", вторым переключателем 46 для управления перемещением рамы 1 в двух направлениях ("ВВЕРХ/ВНИЗ") вертикальной стрелки "V", показанной на Фиг. 2, при помощи привода 34, третьим переключателем 47 для выбора ручного или автоматического режима работы устройства. Переключатель 47 по существу размыкает/замыкает сигнальные линии S1, S2 и S3, S4, определяя соответственно ручной ("РУЧН.") или автоматический ("АВТО") режим работы устройства. Кнопка 48 ("ПОЛУ АВТО") установлена на пульте управления 42 для приведения в действие в ручном режиме работы (переключатель 47 находится в положении "РУЧН.") последовательных и синхронизированных перемещений захватных элементов 15 по двум перпендикулярным осям, соответствующим первому направлению, по существу параллельному земле, и второму направлению, перпендикулярному ее поверхности. И наконец, другая кнопка 49 ("ПРОВЕРКА") предназначена для тестирования упомянутого последовательного и синхронизированного перемещения для проверки надлежащей работы компонентов.
Процесс работы устройства для механизированного перемещения подвижных проволок F, расположенных с противоположных сторон ряда растений, в частности, виноградных лоз, соответствующего первому варианту осуществления настоящего изобретения, ниже описан более подробно. Для пояснения упомянутого процесса работы описано выполнение операций подъема двух подвижных проволок F с первой высоты до второй высоты, величина которой больше величины первой высоты, относительно поверхности обработанной земли. Установка подвижных проволок F на второй высоте также предполагает их помещение в соответствующие удерживающие элементы, расположенные на второй высоте на каждом промежуточном столбе ряда растений.
Устройство, соответствующее настоящему изобретению, которое навешено на сельскохозяйственное транспортное средство или встроено в него так, что оно выступает перпендикулярно направлению движения упомянутого транспортного средства, первоначально расположено так, что рама 1 образует пространство 5 в положении, пригодном для прохода крайнего столба и первого растения, расположенного рядом с этим столбом, без всякого соприкосновения со стойками 2 и 3 или с поперечным элементом 4. Пульт управления 42 (Фиг. 5) включают при помощи выключателя 45, а переключатель 47 устанавливают в ручной ("РУЧН.") режим работы. Положение рамы 1 сначала регулируют при помощи приводов 34 и 35 сельскохозяйственного транспортного средства. В частности, управление приводом 34 осуществляет оператор, сидящий на месте водителя сельскохозяйственного транспортного средства, при помощи переключателя 46 на пульте управления 42. Затем, учитывая положение подвижных проволок F и максимальное перемещение в показанном на Фиг. 2 направлении "V", которое может выполнить рама 1, путем перемещения ползунов 16 и управляемого перемещения стопорных средств 17 определяют положения подвижных средств 14 относительно стоек 2 и 3. Подвижные средства 14 расположены один напротив другого и на одинаковой высоте. Положения подвижных средств 14 относительно стоек 2 и 3 остается неизменным во время выполнения всех операций по перемещению подвижных проволок F. Если устройство должно работать в автоматическом режиме, то положение чувствительных средств 36А, 36В относительно стоек 2 и 3, а также положение чувствительных средств 41А, 41В на штанге 43 настраивают так, как описано выше для захватных элементов 15, путем управляемого перемещения ползунов 38, 50 и приведения в действие стопорных средств 39 и 44, соответственно. Захватные элементы 15 подвижных средств 14 находятся в их первом положении, т.е. на некотором расстоянии один от другого в направлении, параллельном возделанному полю.
После выполнения подготовки к использованию устройства, соответствующего первому варианту осуществления настоящего изобретения, рама 1 охватывает сверху ряд растений так, что подвижные средства 14 для подвижных проволок F располагаются с противоположных сторон ряда на меньшей высоте, чем перед этим. Иначе говоря, рама 1 перемещается сельскохозяйственным транспортным средством, которое движется вперед между двумя соседними рядами вдоль этих рядов до тех пор, пока крайний столб не окажется внутри пространства 5. В этой точке захватные элементы 15 переводят в их второе положение, то есть один напротив другого на несколько большей высоте, чем первоначальная высота подвижных проволок F. Последние, благодаря подводящим поверхностям 24, заходят внутрь захватных элементов 15 и сцепляются с ними. При помощи стопорных средств 18, которые оператор приводит в действие рычагом 19 (Фиг. 3), подвижные проволоки F остаются сцепленными с захватными элементами 15 во время выполнения всех операций перемещения проволок. Затем захватные элементы 15 снова раздвигаются путем управляемого перемещения приводных средств 21. Это приводит к смещению в разные стороны подвижных проволок F вдоль оси, параллельной земле, что позволяет раме 1 переместиться вперед, в то же время сводя до минимума соприкосновение подвижных средств 14 с частями растений.
После выполнения упомянутых подготовительных операций устройство может выполнять механизированное перемещение подвижных проволок F с первого уровня на второй уровень, который в этом описании считается более высоким, чем первый (подъем подвижных проволок F). Из последующего описания для специалиста в данной области техники будут понятны операции, выполняемые устройством, соответствующим настоящему изобретению, если вторая высота меньше, чем первая.
Сельскохозяйственное транспортное средство, а тем самым и рама 1, перемещаются вперед вдоль ряда растений до тех пор, пока рама 1 не окажется вблизи промежуточного столба упомянутого ряда растений, удерживая захватные элементы 15, а следовательно, и подвижные проволоки F, на уровне немного выше, чем уровень, на котором они должны быть установлены. В частности, когда рама 1 близка к контакту с одним из промежуточных столбов в ряду растений или расположена непосредственно над столбом, подвижные проволоки F поднимают под действием привода 34 при помощи переключателя 46 на пульте управления 42. При этом подъеме подвижные проволоки F переносятся на уровень предварительной установки, который несколько выше, чем уровень, на котором упомянутые проволоки должны быть установлены по окончании выполнения операций перемещения. Этот уровень предварительной установки учитывает вертикальный размер крюков, размещенных на каждом промежуточном столбе и определяющих уровни возможного расположения подвижных проволок F. Помещение подвижных проволок F на уровень предварительной установки выполняют путем первого последовательного и синхронизированного перемещения захватных элементов 15 вдоль оси, по существу перпендикулярной обработанной земле.
Для упрощения выполнения операций перемещения подвижных проволок F и для содействия размещению упомянутых проволок F на высоте предварительной установки, прежде чем рама 1 окажется вблизи первого промежуточного столба в ряду растений, захватные элементы 15, соединенные с проволоками F, могут быть сначала установлены вблизи второй высоты, на которой проволоки F должны быть окончательно установлены, под действием привода 34 при помощи переключателя 46 на пульте управления 42.
Установка подвижных проволок F на их окончательную высоту завершается путем перемещения рамы 1 вперед немного далее промежуточного столба, на котором производится изменение высоты проволок F, и нажатия кнопки 48 на пульте управления для выполнения дополнительного последовательного и синхронизированного перемещения захватных элементов 15 вдоль двух осей, расположенных под прямым углом одна к другой или вдоль первой оси, по существу параллельной земле, и второй оси, перпендикулярной ее поверхности. В частности, захватные элементы 15, которые находятся на высоте предварительной установки, сначала переводятся в их второе положение, то есть один рядом с другим, путем управляемого перемещения приводных средств 21 с выполнением соответствующего перемещения подвижных проволок F в направлении одна навстречу другой. Когда захватные элементы 15 достигают своего второго положения, давление текучей среды, циркулирующей в трубопроводе 27А, 27В, возрастает, вызывая приведение в действие привода 34, который опускает захватные элементы 15 вдоль оси, по существу перпендикулярной земле. В конце этого второго перемещения подвижные проволоки F удерживаются на крюке, установленном на промежуточном столбе, и находятся на окончательной высоте установки, на которой проволоки должны быть расположены. После установки проволок F на место захватные элементы 15 возвращаются в их первое положение, т.е. они отводятся на некоторое расстояние один от другого перемещением вдоль оси, по существу параллельной обработанной земле, выполняемым приводными средствами 21. Теперь захватные элементы 15 готовы к перемещению проволок F на следующем промежуточном столбе в соответствии с последовательностью перемещений, описанной выше.
Последовательные и синхронизированные перемещения захватных элементов 15 могут быть выполнены при работе в ручном режиме (переключатель 47 установлен в положение "РУЧН.") и при работе в автоматическом режиме (переключатель 47 установлен в положение "АВТО").
В ручном режиме работы оператору необходимо переместить сельскохозяйственное транспортное средство вдоль ряда растений и выполнить первое перемещение захватных элементов 15 вдоль оси, по существу перпендикулярной земле, непосредственно перед тем, как рама 1 достигнет промежуточного столба ряда, на котором производится перемещение проволок F, и затормозить сельскохозяйственное транспортное средство каждый раз, когда рама 1 достигает положения немного далее упомянутого столба. В этом последнем положении оператор может нажать кнопку 48 для завершения закрепления подвижных проволок F на их заданной высоте. Этот режим работы обеспечивает оператору возможность вручную изменять высоту захватных элементов 15 путем подъема и/или опускания рамы 1 при помощи переключателя 46 на пульте управления 42, который управляет приводом 34. Тем самым оператор может легко учитывать неровности поверхности обработанной земли.
В автоматическом режиме работы повторяющееся торможение сельскохозяйственного транспортного средства у каждого промежуточного столба в ряду исключается. В этом случае чувствительные средства 36А, 36В и 41А, 41В активны и передают на пульт управления 42 сигналы о наличии промежуточного столба вблизи рамы 1, а также о положении самой рамы 1, а следовательно, и о положении захватных элементов 15, в направлении, перпендикулярном земле. Исходя из этого, оператор может вести транспортное средство без перерывов и проводить раму 1 по всей длине ряда. Операция перемещения подвижных проволок F выполняется автоматически для каждого из столбов в ряду.
Когда перемещение подвижных проволок F завершено по всей длине ряда, проволоки Р отделяют от захватных элементов 15 путем приведения в действие стопорных средств 18 при помощи рычага 19 (Фиг. 3), тем самым отводя устройство от ряда.
Для выполнения устройства, соответствующего настоящему изобретению, более практичным и простым в использовании, особенно в автоматическом режиме работы, возможно внесение некоторых изменений в описанные выше элементы с применением следующих обозначений.
В частности, в одном из вариантов исполнения устройства, соответствующего настоящему изобретению, опора 11 содержит механическое шарнирное соединение, которое по существу делит ее на две части. Эти части простираются вдоль одной оси или вдоль параллельных осей и соединены с возможностью поворота, так что одна из упомянутых частей может поворачиваться вокруг продольной оси другой части. Подобно показанному на Фиг. 2, одна из упомянутых частей имеет разъем, который с возможностью поворота установлен в основании 29, выполненном в опоре 28, которая образует часть общего оборудования сельскохозяйственного транспортного средства, например, трактора. На вторую часть опоры 11 опираются кронштейны 10 поворотной четырехугольной рамы 7, показанной на Фиг. 2. Шарнирное соединение между двумя частями опоры может быть оснащено упругим элементом, который способствует повороту второй части относительно первой части в направлении к заданному положению равновесия. Кроме того, относительное взаимное положение двух частей опоры 11 можно установить при помощи подходящего гидравлического привода, управляемого вручную при помощи дополнительного переключателя на пульте управления 42 или автоматически.
Этот вариант исполнения опоры 11 обеспечивает возможность поворота рамы 1 вокруг оси, по существу параллельной земле и перпендикулярной продольному направлению ряда растений. Тем самым возможно удерживать раму 1 настолько перпендикулярно земле, насколько это возможно, компенсируя любые неровности ее поверхности (в частности, различия высоты в продольном направлении ряда растений), которые может преодолевать сельскохозяйственное транспортное средство, на которое оборудование навешено или в которое оно встроено.
В соответствии с другим вариантом исполнения устройства, соответствующего настоящему изобретению, для упрощения работы в ручном режиме чувствительные средства 36А и 36В, вместо установки на стойках 2 и 3 рамы 1, могут быть размещены один за другим в продольном направлении упомянутого ряда растений на элементе, который может быть прикреплен к раме сельскохозяйственного транспортного средства. Положения чувствительных средств 36А и 36В являются такими, что первый датчик 36А установлен перед рамой 1, а второй датчик 36В установлен позади рамы, или же чувствительные средства 36А и 36В установлены на противоположных частях относительно рамы 1. В таком варианте исполнения, когда сельскохозяйственное транспортное средство перемещает устройство к промежуточному столбу ряда растений и автоматический режим работы включен, первый датчик 36А обнаруживает присутствие упомянутого столба и приводит в действие привод 34, который перемещает захватные элементы 15 последовательно и синхронизировано вдоль оси, по существу перпендикулярной земле, перенося подвижные проволоки F на описанную выше высоту предварительной установки. Приведение в действие второго датчика 36В промежуточным столбом ряда при перемещении вперед рамы 1 в продольном направлении ряда указывает на то, что сама рама при перемещении прошла столб, и что при этом может быть завершено закрепление подвижных проволок F на их окончательной высоте установки. Завершение закрепления подвижных проволок на промежуточном столбе ряда выполняется так, как описано выше, то есть путем перемещения захватных элементов 15 последовательно и синхронизировано двумя движениями в противоположных направлениях вдоль оси, по существу параллельной земле и перпендикулярной продольному направлению упомянутого ряда, причем упомянутые два движения разделены дополнительным перемещением захватных элементов 15 вдоль оси, по существу перпендикулярной земле.
В еще одном варианте исполнения устройства, соответствующего настоящему изобретению, поперечный элемент 4 может быть прикреплен к опоре 11 с возможностью поворота несложным шарниром, вокруг оси которого поворачивается вся рама 1. Таким образом, поворотная четырехугольная рама 7 исключена, а вес устройства уменьшен, что повышает компактность устройства.
В соответствии с другим вариантом исполнения для компенсации различий в высоте уровня земли, и тем самым для улучшения условий автоматической работы устройства, возможна установка гидравлического привода на штанге 43, на которой установлены вторые чувствительные средства 41А и 41В для обнаружения положения захватных элементов 115 путем обнаружения положения рамы 1 в направлении, перпендикулярном земле. Привод, управляемый пригодным переключателем на пульте управления 42, обеспечивает оператору возможность перемещения штанги 43 в вертикальном направлении для регулирования ее положения относительно земли в соответствии с формой ее поверхности.
Другое усовершенствование устройства, соответствующего настоящему изобретению, предусматривает пульт управления 42, содержащий программируемый логический контроллер (PLC), который обрабатывает сигналы, полученные от чувствительных средств 36А, 36В, 41А и 41В, а также выполняет программу управления работой приводов, установленных в устройстве, или приводных средств 21 захватных элементов 15 (Фиг. 1), приводов 34 и 35, соответственно для вертикального и горизонтального перемещения рамы 1 (Фиг. 2), привода, установленного на штанге 43 для регулирования вертикального положения вторых чувствительных средств 41А и 41В, которые обнаруживают вертикальное положение захватных элементов 115 путем обнаружения вертикального положения рамы 1, и привода, установленного на соединении на опоре 11, для регулирования относительного положения двух соединенных поворотных частей, которые ее образуют. В частности, работа приводных средств 21 и привода 34 является последовательной, т.е. выполняемой в соответствии с предварительно заданной последовательностью, и синхронизированной, т.е. выполняемой через соответствующие промежутки времени. При применении PLC, приводы 34, 35 и/или приводные средства 21 могут управляться также ручным способом при помощи одной или более ручек управления, установленных на пульте управления 42.
На Фиг. 7 показан второй вариант исполнения устройства, соответствующего настоящему изобретению, которое может быть прикреплено к опоре 28 (Фиг. 2) сельскохозяйственного транспортного средства подобно первому варианту осуществления настоящего изобретения. Во втором варианте осуществления настоящего изобретения элементы, аналогичные первому варианту осуществления, обозначены теми же позициями или соответствующими позициями, а описание их работы и их конструкции не повторяется.
Устройство, соответствующее второму варианту осуществления настоящего изобретения, по существу подобно показанному на Фиг. 1 первому варианту осуществления настоящего изобретения и содержит раму 1, образованную парой параллельных стоек 2, 3, соединенных поперечным элементом, так что образуется пространство 5, открытое снизу и ограниченное сверху поперечным элементом, которая может быть выполнена так, чтобы без существенных помех перемещаться вдоль ряда растений. Во втором варианте осуществления настоящего изобретения рама 1 содержит подвижные средства 114, которые представляют собой пару расположенных один напротив другого захватных элементов 115, в каждом из которых с возможностью перемещения установлена подвижная проволока F ряда растений. На Фиг. 7 для упрощения пояснений показано только одно из двух подвижных средств 114, поскольку другое по существу идентично ему и установлено как зеркальное отражение показанного средства. Для направления подвижных проволок F к захватным элементам 115 выполнены подводящие поверхности 24.
Более конкретно, каждый захватный элемент 115 установлен на одной из стоек 2, 3 с помощью ползуна 116, скользящего по стойке 2, 3, которая служит в качестве направляющей. Положение каждого захватного элемента 115 на стойке 2, 3, на которой он установлен, фиксируется путем управляемого перемещения цепи 160, частично охватывающей шкивы 161 (только один из этих шкивов показан на Фиг. 7), размещенные на концах каждой стойки 2, 3, причем концы цепи прикреплены к ползуну 116. Перемещение цепи может быть обеспечено, например, электрическим двигателем, установленным на раме 1 и имеющим звездочку, находящуюся в зацеплении с цепью 160. Захватные элементы 115 имеют стопорные средства 18, которые предотвращают высвобождение подвижных проволок F из захватных элементов 115, что обеспечивает некоторые преимущества. Стопорные средства 18 могут представлять собой шпильку, которую устанавливают в прорезь, в которой с возможностью перемещения закреплены подвижные проволоки F.
Во втором варианте осуществления настоящего изобретения каждое из стопорных средств 18 может быть приведено в действие, например, в поперечном направлении относительно подвижных проволок F, при помощи пневматического привода 162, имеющего пару пневмопроводов 163А, 163 В, необходимых для его работы. Привод 162 установлен на опоре 164, которая несет направляющие поверхности 24 для подвижных проволок F и которая в свою очередь соединена с направляющей поверхностью 140, предназначенной для направления частей растений в заданные положения.
Подвижные средства 114 содержат приводные средства 121, содержащие пневматические поршни, предназначенные для перемещения захватных элементов 115 между первым положением, в котором последние раздвинуты на некоторое расстояние один от другого, и вторым положением, в котором захватные элементы 115 придвинуты ближе один к другому. В первом положении захватных элементов 115 подвижные проволоки F находятся на максимальном расстоянии одна от другой, тогда как во втором положении захватных элементов 115 подвижные проволоки F находятся на минимальном расстоянии или даже в соприкосновении одна с другой. Упомянутые пневматические поршни приводятся в действие парой пневмопроводов 165А, 165 В. Первый конец 168 пневматических поршней, образующих приводные средства 121, установлен на опоре 166, которая, как подробнее описано ниже, выполнена как единое целое с ползуном 170, который перемещается по направляющей 167, простирающейся вдоль подвижных проволок F, и неподвижно закреплена на ползуне 116. Второй конец 169, соответствующий концу скользящего штока пневматических поршней, соединен с направляющей поверхностью 140, так что последняя перемещается совместно с захватными элементами 115.
Для обеспечения возможности одновременного перемещения захватных элементов 115 и направляющей поверхности 140 под действием приводных средств 121 ползун 171, соединенный с поверхностью 140, установлен с возможностью перемещения по направляющей 172, установленной на опоре 166 по существу перпендикулярно направлению подвижных проволок F.
Ограничитель 173 хода определяет величину хода ползуна 171, что обеспечивает возможность одновременного перемещения захватных элементов 115, направляющих поверхностей 140 для листвы, подводящих поверхностей 24 подвижных проволок и промежуточной опоры 164, на которой установлен привод 162, в направлении, по существу перпендикулярном направлению подвижных проволок F и по существу параллельном земле, в которой высажен ряд растений. На ползуне 171 закреплен ограничитель хода 173 и предпочтительно представляет собой штангу, установленную с возможностью перемещения в опоре 174, прикрепленной к ползуну 170, что обеспечивает возможность поступательного перемещения опоры 166 в направлении, по существу параллельном подвижным проволокам F. Ограничитель хода 173 имеет два упора 175А, 175В, которые при перемещении в направлении по существу под прямым углом к подвижным проволокам вместе с ползуном 171 упираются в выступ 176, выполненный на опоре 166 вблизи ползуна 170, и останавливаются на упомянутом выступе 176, таким образом определяя пределы хода ползуна 171, а следовательно, и захватных элементов 115. На Фиг. 7 упор 175 В показан в положении соприкосновения с выступом 176, т.е. захватный элемент 115 находится в первом положении, в котором подвижные проволоки F расположены на максимальном расстоянии одна от другой.
К ползуну 171, который обеспечивает возможность перемещения захватных элементов 115, прикреплен кронштейн 177, простирающийся в направлении, по существу параллельном подвижным проволокам F, и под прямым углом к ползуну 171. Кронштейн 177 также простирается в направлении, противоположном направлению стрелки "А", которая показана на Фиг. 7 и соответствует направлению движения вперед устройства, соответствующего настоящему изобретению, во время выполнения операций по перемещению подвижных проволок F.
Предпочтительно на конце кронштейна 177, противоположном концу, прикрепленному к ползуну 171, шарнирно закреплен щиток 178, выполненный с возможностью поворачивания между нерабочим откинутым положением (показанным на Фиг.7), в котором щиток 178 расположен параллельно стойкам 2, 3 и направлению движения устройства, показанному стрелкой "А", во время выполнения операций по перемещению подвижных проволок F, и рабочим положением, в котором щиток 178 расположен поперечно относительно упомянутого направления движения "А", путем его поворачивания в направлении к стойке 3. Направление поворачивания щитка 178 вокруг оси 179 показано стрелкой "В" на Фиг. 7. Щиток на подвижных средствах 114, размещенный на стойке 3 как его зеркальное отражение и не показанный на Фиг. 7, поворачивается в направлении к стойке 2 ближе к другому щитку 178. Как описано ниже, щитки 178 предназначены для удерживания проволок F в захватах 115 вблизи промежуточного столба в ряду при выполнении перемещения проволок с первой высоты на вторую высоту над землей.
Поворачивание щитка 178 вокруг оси 179 обеспечивается приводом 180, предпочтительно выполненным в виде пневматического поршня, имеющего пару пневмопроводов 181А, 181В. Перемещение щитков 178, установленных на подвижных средствах 114, является согласованным последовательно с перемещением захватных элементов 115.
Как уже указано, опора 166 выполнена как единое целое с ползуном 170, который перемещается на направляющей 167, простирающейся в направлении подвижных проволок F. При помощи крепежных элементов 182А и 182В направляющая 167 неподвижно прикреплена к ползуну 116, который перемещается по стойке 2. Направляющая 167 в общем простирается в направлении, противоположном направлению стрелки "А", которая показана на Фиг.7 и соответствует направлению движения устройства, соответствующего настоящему изобретению, во время выполнения операций по перемещению подвижных проволок F. Перемещение всей опоры 166, а тем самым и захватных элементов 115, вдоль подвижных проволок F обеспечивается приводом 183, предпочтительно выполненным в виде пневматического поршня, имеющего пару пневмопроводов 184А и 184В для обеспечения выполнения перемещений его хода. Управление приводом 183 осуществляется с использованием пневмопроводов 184А и 184В для перемещения захватных элементов 115 дальше от стоек 2, 3, а затем ближе к ним. Перемещение всей опоры 166, а тем самым и захватных элементов 115, от стоек 2, 3 ограничено максимальным ходом привода 183, тогда как перемещение в направлении к стойкам 2, 3 ограничено упором 185, прикрепленным к направляющей 167.
Таким образом, во втором варианте исполнения устройства захватные элементы 115, дополнительно к перемещениям, уже описанным для первого варианта осуществления изобретения, могут также перемещаться вдоль подвижных проволок F, сохраняя соединение с ними в прорези, в которую помещены проволоки. Это дополнительное перемещение значительно повышает возможность автоматизации выполнения операций по перемещению подвижных проволок F с первой высоты на вторую высоту. Практически перемещение захватных элементов 115 от стоек 2 и 3 обеспечивает возможность более длительного удерживания упомянутых захватных элементов 115 вблизи промежуточного столба ряда растений, на котором производится перенос подвижных проволок F, тогда как вся рама 1, у которой ряд растений находится в пространстве 5, без перерывов перемещается в направлении "А", показанном на Фиг. 7.
Следует также отметить, что во втором варианте исполнения устройства, соответствующего настоящему изобретению, перемещение захватных элементов 115 в направлении, по существу перпендикулярном земле, может быть осуществлено двумя способами. Первый способ уже описан для первого варианта исполнения устройства. Иначе говоря, он представляет собой сохранение положения каждого захватного элемента 115 неизменным относительно соответствующей стойки 2, 3, на которой он установлен, и подъем всей рамы 1 с помощью привода 34, показанного на Фиг. 2, при вероятном использовании чувствительных средств 41А и 41В, показанных на Фиг. 4. Второй способ работы включает перемещение захватных элементов 115 путем их перемещения вдоль соответствующих стоек 2, 3 посредством управляемого движения каждой цепи 160, связанной с соответствующим ползуном 116, при сохранении положения рамы I неизменным относительно земли.
Второй вариант исполнения устройства, соответствующего настоящему изобретению, включает в себя чувствительные средства 136, которые по существу обнаруживают момент, когда рама 1 только что прошла столб в ряду растений. Чувствительные средства 136 установлены на элементе 186, который может быть прикреплен к раме сельскохозяйственного транспортного средства, что обеспечивает некоторые преимущества. Элемент 186 обеспечивает возможность регулировки положения чувствительных средств 136 в направлении под прямым углом к подвижным проволокам, так что столб в ряду, который оказывается между стойками 2, 3, обязательно входит в контакт с чувствительной частью чувствительных средств 136. Чувствительные средства 136 также оказываются в положении позади рамы 1 вдоль направления ее перемещения, показанного стрелкой "А" на Фиг.7. Чувствительные средства 136 имеют сигнальную линию S101, которая сигнализирует о присутствии промежуточного столба в ряду и тем самым начинает процесс перемещения подвижных проволок F с первой высоты на вторую высоту над землей, как описано ниже.
Процесс работы второго варианта исполнения устройства, соответствующего настоящему изобретению, для механизированного переноса подвижных проволок F, расположенных с противоположных сторон ряда растений, в частности, виноградных лоз, ниже описан более подробно. Подобно описанию для первого варианта исполнения, для пояснения упомянутого процесса работы ниже описано выполнение операций подъема двух подвижных проволок F с первой высоты до второй высоты, величина которой больше первой высоты относительно земли. Установка подвижных проволок F на второй высоте также предполагает их помещение в соответствующие удерживающие элементы, расположенные на второй высоте на каждом промежуточном столбе ряда растений. Очевидно, что если вторая высота меньше, чем первая высота, то операции, которые должна выполнять рама устройства, соответствующего настоящему изобретению, понятны специалисту в данной области техники из последующего описания.
В последующем описании с целью упрощения пояснений перенос захватных элементов 115 в направлении, перпендикулярном земле, на которой расположен ряд растений, осуществляют путем перемещения всей рамы 1 при помощи привода 34 (Фиг. 2) и управления величиной упомянутого перемещения при помощи чувствительных средств 41А и 41В, показанных на Фиг. 4.
Устройство, соответствующее настоящему изобретению, навешенное на сельскохозяйственное транспортное средство или встроенное в него так, что оно выступает от него перпендикулярно направлению движения упомянутого транспортного средства, первоначально расположено так, что рама 1 образует пространство 5 в положении, пригодном для вмещения крайнего столба и первого растения, расположенного рядом с этим столбом, без всякого соприкосновения со стойками 2 и 3 или с поперечным элементом, расположенным между стойками 2 и 3. Положение рамы 1 сначала регулируют при помощи приводов 34 и 35 сельскохозяйственного транспортного средства. Затем, учитывая положение подвижных проволок F и максимальное перемещение в показанном на Фиг. 2 направлении "V", которое может выполнить рама 1, определяют положения подвижных средств 114 относительно стоек 2 и 3 путем перемещения ползунов 116 посредством управляемого перемещения цепей 160 при помощи электрического двигателя, снабженного звездочкой цепной передачи, находящейся в зацеплении с соответствующей цепью 160. Подвижные средства 114 расположены один напротив другого и на одинаковой высоте. Как упрощенно описано выше, положения подвижных средств 114 относительно стоек 2 и 3 остается неизменным во время выполнения всех операций по перемещению подвижных проволок F. Положение чувствительных средств 136 регулируют в направлении, перпендикулярном подвижным проволокам F, так что чувствительная часть чувствительных средств 136 входит в соприкосновение со столбом в ряду, как только рама 1 проходит его. Положения чувствительных средств 41А, 41В на штанге 43 (Фиг. 4) регулируют путем управляемого перемещения ползунов 50 и упора 44, соответственно. Захватные элементы 115 подвижных средств 114 находятся в их первом положении, т.е. на некотором расстоянии один от другого в направлении, параллельном земле.
После выполнения указанных выше операций рама 1 охватывает сверху ряд растений, так что подвижные средства 114 относительно подвижных проволок F располагаются с противоположных сторон ряда на меньшей высоте, чем подвижные проволоки F. Иначе говоря, рама 1 перемещается сельскохозяйственным транспортным средством, которое движется вперед между двумя соседними рядами вдоль этих рядов до тех пор, пока крайний столб не окажется внутри пространства 5. Теперь захватные элементы 115 переводят в их второе положение, т.е. один напротив другого, но на несколько большей высоте, чем первоначальная высота подвижных проволок F. Проволоки, благодаря подводящим поверхностям 24, входят внутрь захватных элементов 115 и сцепляются с ними. Благодаря стопорным средствам 18, приводимым в действие оператором с использованием привода 162, подвижные проволоки F остаются сцепленными с захватными элементами 115 во время выполнения всех операций по переносу подвижных проволок F в ряду. Затем захватные элементы 115 снова отодвигаются один от другого под действием приводных средств 121. Это приводит к смещению подвижных проволок F в разные стороны вдоль оси, параллельной земле, что позволяет раме 1 переместиться вперед, в то же время сводя до минимума соприкосновение подвижных средств 114 с частями растений.
В этот момент захватные элементы 115, а следовательно, и подвижные проволоки F, переносятся на уровень незначительно выше той высоты, с которой они должны быть перемещены. Эту высоту регулируют вручную у первого промежуточного столба ряда, который проходит рама 1, путем управляемого перемещения привода 34 (Фиг. 2) до тех пор, пока телескопическая балка 37 опоры 28 не окажется вблизи чувствительного средства 41В (Фиг. 4). Эта высота соответствует высоте предварительной установки, т.е. уровню, который несколько выше, чем высота, на которой подвижные проволоки должны быть установлены по окончании выполнения операций перемещения. Эта высота предварительной установки учитывает вертикальный размер удерживающих элементов, размещенных или выполненных на каждом промежуточном столбе в ряду и определяющих уровни возможного расположения подвижных проволок F.
В этот момент во время перемещения рамы 1 вдоль ряда растений сельскохозяйственным транспортным средством в направлении стрелки "А", показанной на Фиг. 7, проход рамой 1 промежуточного столба приводит в действие чувствительные средства 136, которые по сигнальной линии S101 приводят в действие устройство.
Захватные элементы 115, которые соединяются с подвижными проволоками F, переводятся в их второе положение, т.е. один рядом с другим, путем последовательного и синхронизированного перемещения вдоль оси, по существу параллельной земле, которое достигается работой каждого из приводных средств 121. После этого перемещения, которое происходит приблизительно на упомянутой выше высоте предварительной установки, захватные элементы 115 переводятся в положение между стойками 2, 3 и промежуточным столбом, который только что прошла рама 1. Кроме того, щитки 178 каждого из подвижных средств 114 перемещаются ближе один к другому. Одновременно с приведением в действие приводных средств 121 или непосредственно после того, как захватные элементы 115 начали перемещение, приводы 180, управляющие поворотом щитков 178 в направлении один к другому, также приводятся в действие, тем самым закрепляя проволоки F вблизи столба, на котором они должны быть закреплены.
Как только захватные элементы 115 достигают своего второго положения (упор 175А упирается в выступ 176, выполненный на опорном элементе 166), и они продолжают движение вперед вместе с сельскохозяйственным транспортным средством, причем захватные элементы 115 остаются в упомянутом втором положении, приводы 183 каждого из подвижных средств 114 приводятся в действие для перемещения каждого опорного элемента 166, а тем самым и захватных элементов 115, в направлении, противоположном направлению перемещения рамы 1 вдоль оси, параллельной земле. Благодаря этому перемещению, направление которого противоположно направлению перемещения рамы 1 вдоль ряда, захватные элементы 115, протягиваемые сельскохозяйственным транспортным средством, которое продолжает двигаться вперед без перерывов на скорости, которая выше, чем максимально достижимая скорость для правильной работы первого варианта исполнения устройства, могут оставаться вблизи промежуточного столба, на котором производится перенос подвижных проволок F, в течение промежутка времени, достаточного для завершения их переноса.
Одновременно с приведением в действие приводов 183 или непосредственно после того, как захватные элементы 115 начали свое перемещение, приводы 34 (Фиг. 2) также приводятся в действие, осуществляя перемещение рамы 1, и захватных элементов 115, выполненных как единое целое с ней, с высоты предварительной установки на окончательную высоту установки подвижных проволок F, иначе говоря, новую высоту, на которую производится перенос проволок F. Управляемое перемещение привода 34 происходит вдоль оси, перпендикулярной земле, т.е. в направлении "V", показанном на Фиг.2, и в этом поясняющем описании перемещение захватных элементов 115 происходит в направлении к земле.
Таким образом, по существу одновременное приведение в действие приводов 183 и 34 вызывает последовательные и синхронизированные перемещения захватных элементов 115 вдоль двух осей, одна из которых по существу параллельна земле, а другая перпендикулярна земле. Такие перемещения завершают закрепление подвижных проволок F на окончательной высоте их установки на промежуточном столбе в ряду.
Затем устройство выполняет возврат захватных элементов 115 в их исходное положение, схематически показанное на Фиг. 7. Это достигается путем перемещения захватных элементов 115 из их второго положения в их первое положение, т.е. путем раздвигания захватных элементов 115 на максимальное расстояние между ними с сохранением постоянного контакта с подвижными проволоками F. Возвратное перемещение двух захватных элементов 115 выполняется путем приведения в действие приводных средств 121 снова вдоль оси, параллельной земле. Одновременно с приведением в действие приводных средств 121 приводы 180 также приводятся в действие для разведения щитков 178 в обратном направлении путем поворота вокруг соответствующих осей 179.
После того как захватные элементы 115 достигли своего первого положения или находятся вблизи этого положения, приводы 183 приводятся в действие снова для перемещения захватных элементов 115 в положение вблизи стоек 2, 3 путем их перемещения в направлении стрелки "А", показанной на Фиг. 7. Одновременно с приведением в действие приводов 183 или немедленно после начала перемещения захватных элементов 115 в направлении к стойкам 2, 3, привод 34 также приводится в действие для возврата захватных элементов 115 с высоты окончательной установки подвижных проволок F на высоту предварительной установки.
В конце выполнения этих перемещений устройство готово к повторению переноса подвижных проволок F путем их перемещения с первой высоты над землей и установки их вновь на промежуточных столбах в ряду на второй высоте, отличающейся от первой.
Разумеется, согласованная работа приводов 34, 121, 180, 183 происходит под контролем программируемого логического контроллера (PLC) или другой пригодной системы управления, например, такой как электромеханический блок управления; кроме того, приводные средства 121, 180, 183 и 162 образуют части пневматической системы, питаемой соответствующими средствами перекачивания.
На Фиг. 8 и Фиг. 9 показан третий вариант исполнения устройства, соответствующего настоящему изобретению, в котором устройство выполнено так, что его можно прикрепить к опоре 28 (Фиг. 2) сельскохозяйственного транспортного средства, так, как описано для двух предшествующих вариантов осуществления настоящего изобретения. Третий вариант осуществления настоящего изобретения особенно пригоден для перемещения подвижных проволок с первой на вторую высоту над землей в полностью автоматическом режиме. В любом случае при необходимости устройство, соответствующее третьему варианту осуществления настоящего изобретения, может выполнять перемещение проволок в повторяющемся режиме с ручным управлением. В этом третьем варианте осуществления элементы, аналогичные первому и/или второму варианту осуществления, обозначены теми же позициями или аналогичными позициями, а описание их работы и их конструкции не повторяется.
В третьем варианте осуществления настоящего изобретения рама 301, которая образована парой стоек 302, 303, с возможностью перемещения соединенных с концами каркаса 387, который расположен поперек стоек 302, 303, тем самым образуя пространство 305, может быть выполнена так, чтобы без существенных помех перемещаться вдоль ряда растений. Каркас 387 содержит узел стоек 388, образованный по существу из двух направляющих элементов 389, к которым с возможностью перемещения присоединены стойки 302 и 303, а также пара поперечных кронштейнов 389А, 389В, концы которых прикреплены к направляющим элементам 389. Каркас 387 шарнирно прикреплен с возможностью поворота к корпусу 390 при помощи оси 391, которая простирается параллельно паре поперечных кронштейнов 389А, 389В, т.е. в поперечном направлении, в частности, перпендикулярно паре стоек 302 и 303. Благодаря наличию оси 391 рама 301 может поворачиваться вокруг нее и компенсировать любые неровности земли, имеющиеся в направлении перемещения сельскохозяйственного транспортного средства (стрелка "А" на Фиг. 8), к которому может быть прикреплено устройство, и/или компенсировать любые переплетения частей растений в рабочих зонах машины, когда она перемещается вперед вдоль ряда растений. Поворачиванию рамы вокруг оси 391 противодействуют жидкостные и/или газовые амортизаторы 392А и упругие элементы 392В, расположенные между узлом стоек 388 и корпусом 390. В частности, на Фиг. 8 показано, что гидродинамические амортизаторы 392А представляют собой пару газовых амортизаторов, тогда как упругие элементы 392 В представляют собой пару спиральных пружин, имеющих первый конец, прикрепленный к поперечному кронштейну 389В, и второй конец, прикрепленный к корпусу 390.
В свою очередь, корпус 390 с возможностью поворота прикреплен к основанию 311 при помощи оси 393 и кронштейна 394, выполненных как единое целое с основанием 311. Ось 393 простирается в направлении перемещения устройства вперед (стрелка "А" на Фиг. 8), и при этом рама 301 может качаться в поперечном направлении в пределах ряда растений, тем самым компенсируя неровности земли, встречаемые сельскохозяйственным транспортным средством, на котором установлено устройство. Для гашения качаний рамы 301 между корпусом 390 и основанием 311 установлен привод 394 демпфера.
К каркасу 387 прикреплена пара подводящих элементов 395, содержащих пару лент 396А и 396В, приводимых в движение роликами 397, по меньшей мере один из которых имеет привод от двигателя 398, например, электрического, пневматического или гидравлического типа. Подводящие элементы 395 простираются вперед относительно рамы 301 в направлении перемещения вперед рамы над рядом растений, когда рама перемещается сельскохозяйственным транспортным средством (стрелка "А" на Фиг. 8).
Подводящие элементы 395 взаимодействуют с частями растений, когда раму 301 перемещают вдоль ряда лозы, способствуя их отодвиганию и тем самым предотвращая создание ими препятствий перемещению подвижных проволок. Ленты 396А и 396В могут быть приведены в действие в обоих направлениях, тем самым обеспечивая возможность соответствующего перемещения частей растений без их повреждения. Ролики 397 также могут иметь оси вращения, наклоненные встречно для разворачивания лент по длине.
На каркасе 387 установлен электрический двигатель 399 (Фиг. 8), который приводит в действие пару зубчатых колес 400 (только одно из них показано на Фиг. 8), находящихся в зацеплении с рейкой или цепью, расположенных на каждой из двух стоек 302, 303. Эта механическая передача предназначена для перемещения стоек 302, 303 относительно каркаса 387 в направлении, по существу перпендикулярном земле. Это перемещение, которое складывается с перемещением, которое может быть придано всей раме 301 при помощи привода 34, как описано выше для первых двух вариантов осуществления настоящего изобретения, полезно при выполнении предварительных операций подготовки устройства, когда подвижные проволоки, подлежащие перемещению, присоединяются к нему.
На каждой из двух стоек 302, 303 установлен пневматический привод 401 и 402, соответственно, имеющий соответственно пару пневмопроводов 401А, 401В; 402А, 402В, необходимых для работы упомянутых приводов. Для обеспечения перемещения вдоль стойки каждый из приводов 401, 402 расположен между соответствующей стойкой 302, 303 и подвижными средствами 314, установленными на каждой из двух стоек 302, 303. В третьем варианте осуществления настоящего изобретения последовательное и синхронизированное перемещение подвижных средств 314 в направлении, перпендикулярном земле, для переноса подвижных проволок ряда растений достигается путем поступательного перемещения подвижных средств 314 вдоль стоек 302, 303 без необходимости подъема или опускания всей рамы 301. Тем самым вес движущихся масс уменьшается, что обеспечивает определенные преимущества.
Таким образом, в третьем варианте осуществления настоящего изобретения в направлении, перпендикулярном земле, возможно следующее: перемещение всей рамы 301 при помощи привода 34 (Фиг. 2); перемещение стоек 302, 303 относительно каркаса 387 за счет управляемой работы электрического двигателя 399; перемещение подвижных средств 314 относительно стоек 302, 304 путем управляемого перемещения приводов 401, 402.
Конструкция и работа подвижных средств 314 по существу идентичны средствам 114 в предшествующем описании второго варианта осуществления настоящего изобретения. В частности, перемещение захватных элементов 315 в продольном направлении подвижных проволок F достигается при помощи привода 383, предпочтительно содержащего пневматический цилиндр, имеющий пневмопроводы 384А и 384В, необходимые для его работы. Управление приводом 383 может осуществляться с использованием пневмопроводов 384А и 384В для перемещения захватных элементов 315 дальше от стоек 302, 303, а затем ближе к ним. Кроме того, поворот вокруг шпильки 379 каждого из щитков 378 обеспечивается на подвижных средствах 314 приводом 380, предпочтительно выполненном в виде пневматического поршня, имеющего пару пневмопроводов 381А, 381В, необходимых для его работы. Перемещение щитков 378 последовательно согласовано с перемещением захватных элементов 315.
Операции цикла перемещения подвижных проволок, выполняемые устройством, соответствующим третьему варианту осуществления настоящего изобретения, идентичны операциям процесса, описанного для второго варианта осуществления настоящего изобретения. Разумеется, как уже указано, в третьем варианте осуществления настоящего изобретения перемещение захватных элементов 315, расположенных на подвижных элементах, в направлении, перпендикулярном земле, выполняется приводами 401, 402 вместо привода 34, который перемещает всю раму 301. Привод 34 и электрический двигатель 399 работают на подготовительных стадиях установки устройства выше ряда растений и соединения подвижных проволок F с захватными элементами 315.
Перемещение вдоль стоек 302 и 303 захватных элементов 315, расположенных на подвижных средствах 314, ограничивается парой чувствительных средств 341А и 341В, возможностью перемещения прикрепленных к стойке 302. На практике, когда захватные элементы 315 при их перемещении вдоль стоек 302, 303 входят в контакт с одним из чувствительных средств 341А, 341В, перемещение захватных элементов 315 прекращается. Назначение чувствительных средств 341А, 341В идентично назначению чувствительных средств 41А, 41В, описанных для первого и второго вариантов осуществления настоящего изобретения.
Цикл перемещения подвижных проволок на ряду растений запускается чувствительными средствами 336, которые по существу обнаруживают момент, когда рама 301 только что прошла столб в ряду растений. Чувствительные средства 336 установлены на элементе 386, который может быть прикреплен к раме сельскохозяйственного транспортного средства или опоре 311, как показано на Фиг. 9, что обеспечивает некоторые преимущества. Элемент 386 обеспечивает возможность регулировки положения чувствительных средств 336 в направлении, перпендикулярном к продольному направлению подвижных проволок, так что столб в ряду, который оказывается между стойками 302, 303, обязательно входит в соприкосновение с чувствительными средствами 336. Кроме того, чувствительные средства 336 также самопроизвольно приходят в положение позади рамы 301 вдоль своего направления перемещения, показанного стрелкой "А" на Фиг. 8. Чувствительные средства 336 имеют сигнальную линию S301, которая сигнализирует о присутствии промежуточного столба в ряду, тем самым запуская перемещение подвижных проволок F с первой высоты на вторую высоту над землей. Под действием пневматического привода 403 чувствительные средства 336 могут быть втянуты так, чтобы не соприкасаться со столбами в ряду, когда необходимо перемещать раму 301 выше ряда, не выполняя цикл перемещения подвижных проволок F.
В третьем варианте осуществления настоящего изобретения возможно подсоединение пневматических систем, питающих трубопроводы 365А, 365В, для управления приводными средствами 321, представляющими собой пневматические поршни, которые перемещают захватные элементы 315 из первого положения, в котором последние раздвинуты на некоторое расстояние один от другого, и из второго положения, в котором захватные элементы 315 придвинуты ближе один к другому. Подсоединение пневматических систем используется для обеспечения возможности немедленной передачи текучей среды из одного приводного средства 321 в другое, таким образом обеспечивая возможность перемещения захватных элементов 315 ближе один к другому, т.е. в упомянутом втором положении одновременно в одном направлении перемещения, определяемом приводными средствами 321, и без движения в разные стороны. Это отличие в работе особенно полезно для компенсации неожиданных перемещений рамы 301 и/или сельскохозяйственного транспортного средства в направлении поперек ряда растений по причине, например, неровностей земли. Это позволяет избежать возможности оттягивания подвижных проволок F, соединенных с захватными элементами 315, поперек ряда вместе с рамой 301.
Из вышеизложенного понятно, что изобретение достигает своей цели и решает поставленные задачи, поскольку устройство, созданное для механизированного перемещения подвижных проволок в ряду растений, позволяет оператору осуществлять организацию роста растений, находящихся в рядах значительной длины, не выходя из сельскохозяйственного транспортного средства, на которое устройство навешено или в которое оно встроено с возможностью снятия. Устройство может выступать с одной стороны упомянутого транспортного средства в направлении, перпендикулярном направлению перемещения этого сельскохозяйственного транспортного средства. Альтернативно устройство может быть прикреплено к передней или задней части сельскохозяйственного транспортного средства при помощи пригодных систем навески, которые могут быть уже установлены ранее на данном транспортном средстве. При этом сельскохозяйственное транспортное средство может перемещаться между двумя соседними рядами растений, а рама 1 может охватывать сверху ряд, проходящий обработку. С использованием пригодных систем крепления устройство, соответствующее настоящему изобретению, также может быть прикреплено к сельскохозяйственным транспортным средствам, имеющим колею (ширину транспортного средства), которая определяется арочной конструкцией, позволяющей охватывать сверху ряд растений, при которой колеса упомянутого транспортного средства движутся по двум колеям на поверхности земли, которые расположены между двумя соседними рядами группы шпалер из трех рядов в их направлении. В данном случае устройство может быть просто навешено на арочную конструкцию, ограничивающую качание устройства, вызванное любыми неровностями земли, по которой движется это сельскохозяйственное транспортное средство.
Благодаря использованию устройства и способа, соответствующих настоящему изобретению, части растений в зоне перемещения подвижных проволок не подвергаются никаким повреждениям, т.е. обеспечивается их естественный рост. Устройство, соответствующее настоящему изобретению, может работать как в автоматическом режиме, выполняя все операции, необходимые для перемещения подвижных проволок, всякий раз когда оборудование проходит вблизи столба в ряду растений, так и в полуавтоматическом режиме, в котором оператор вручную запускает цикл перемещения подвижных проволок после подведения устройства к столбу в ряду, что обеспечивает некоторые преимущества. Устройство может быть сконструировано так, чтобы частично складываться внутрь так, чтобы занимать наименьшее возможное пространство в нерабочем положении и повышать удобство движения сельскохозяйственного транспортного средства при движении по дорогам, что обеспечивает некоторые преимущества.
Способ работы устройства для механизированного перемещения подвижных проволок в ряду растений может быть легко приспособлен к рядам растений, имеющим различные виды расположения и количество подвижных проволок в шпалерах, причем один и тот же способ может быть одинаково эффективным. Для этого последовательность синхронизированных перемещений, выполняемых захватными элементами 15, 115, 315 вдоль оси, параллельной земле, и оси, перпендикулярной ее поверхности, может быть проведена по необходимости в различных режимах относительно перемещения рамы 1 вдоль ряда растений. Также было выявлено, что устройство, соответствующее настоящему изобретению, может не только выполнять операции подъема подвижных проволок, но и операции опускания этих проволок без повреждений частей растений.
Варианты исполнения устройства для механизированного перемещения подвижных проволок в ряду растений, в частности, виноградных лоз, соответствующего настоящему изобретению, не ограничены вариантами, показанными на прилагаемых фигурах, и могут быть выполнены различные варианты этого устройства, без выхода за пределы объема прилагаемой формулы изобретения. Материалы и размеры отдельных элементов устройства, соответствующего настоящему изобретению, должны быть выбраны исходя из наибольшего соответствия конкретным требованиям.
| название | год | авторы | номер документа |
|---|---|---|---|
| НАПРАВЛЯЮЩЕЕ И КРЕПЕЖНОЕ УСТРОЙСТВО ДЛЯ ПРОВОЛОК, ПОДДЕРЖИВАЮЩИХ РАСТЕНИЯ | 2012 |
|
RU2601581C2 |
| Подвижная подпорка и способ поддерживания и формирования одной или более ветви(-ей) выращиваемого растения | 2015 |
|
RU2662200C1 |
| Устройство для крепления и регулирования несущих проволок в ряду растений | 2014 |
|
RU2636172C2 |
| КРЕПЕЖНОЕ УСТРОЙСТВО ДЛЯ ПОДВИЖНЫХ ПРОВОЛОК В РЯДУ РАСТЕНИЙ | 2011 |
|
RU2558434C2 |
| Опорная стойка для виноградников | 2017 |
|
RU2736890C2 |
| СОЕДИНЕНИЯ, ПРЕДСТАВЛЯЮЩИЕ СОБОЙ РЕГУЛЯТОРЫ РОСТА РАСТЕНИЙ | 2017 |
|
RU2764749C2 |
| Машина для подвязки растений к шпалерной проволоке | 1986 |
|
SU1373361A1 |
| АВТОМАТИЧЕСКАЯ МАШИНА ДЛЯ ГИБКИ ЭЛЕКТРОСВАРНЫХ СЕТОК | 2013 |
|
RU2620316C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ МАШИНА ДЛЯ УБОРКИ ЗЕЛЕНЫХ КОРМОВ | 2007 |
|
RU2418404C2 |
| ОПОРА ДЛЯ ВИНОГРАДАРСТВА И САДОВОДСТВА | 2018 |
|
RU2708845C1 |
Группа изобретений относится к сельскому хозяйству. Способ включает механизированное перемещение подвижных проволок с первой высоты на вторую высоту, расположенных с противоположных сторон ряда растений, в частности виноградных лоз. Сначала осуществляют установку рамы с охватом сверху ряда растений так, что подвижные средства расположены для перемещения подвижных проволок с противоположных сторон упомянутого ряда. Далее соединяют подвижные проволоки с парой захватных элементов, расположенных на подвижных средствах, и устанавливают раму вблизи промежуточного столба ряда растений. Перемещают захватные элементы на высоту предварительной установки путем последовательного и синхронизированного перемещения вдоль по меньшей мере одной оси, по существу перпендикулярной земле, на которой расположен ряд растений. Устанавливают подвижные проволоки на вторую высоту путем последовательного и синхронизированного перемещения упомянутых захватных элементов вдоль двух осей, одна из которых по существу параллельна земле, а другая перпендикулярна земле. Сельскохозяйственное транспортное средство содержит устройство, реализующее описанный выше способ. Такие технология и конструктивное выполнение позволят автоматизировать операции по перемещению проволок в ряду растений. 2 н. и 3 з.п. ф-лы, 9 ил. 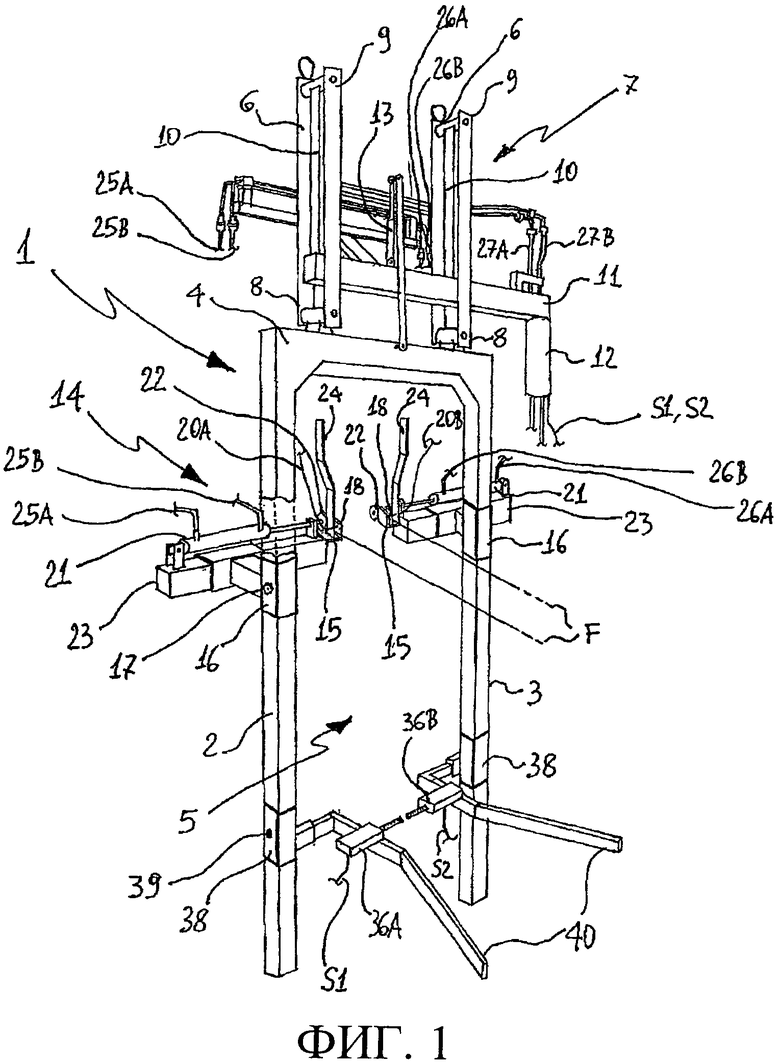
1. Способ механизированного перемещения подвижных проволок (F), расположенных с противоположных сторон ряда растений, с первой высоты на вторую высоту, в частности виноградных лоз, отличающийся тем, что включает следующие операции:
a) установка рамы (1, 301) с охватом сверху ряда растений так, что средства (14, 114, 314) расположены для перемещения подвижных проволок (F) с противоположных сторон упомянутого ряда;
b) соединение подвижных проволок (F) с парой захватных элементов (15, 115, 315), расположенных на упомянутых подвижных средствах (14, 114, 314), и установка упомянутой рамы (1, 301) вблизи промежуточного столба упомянутого ряда;
c) перемещение захватных элементов (15, 115, 315) на высоту предварительной установки путем последовательного и синхронизированного перемещения вдоль по меньшей мере одной оси, по существу перпендикулярной обработанной земле, на которой расположен упомянутый ряд;
d) установка подвижных проволок (F) на второй высоте путем последовательного и синхронизированного перемещения упомянутых захватных элементов (15, 115, 315) вдоль двух осей, одна из которых по существу параллельна обработанной земле, а другая перпендикулярна упомянутой земле.
2. Способ по п. 1, отличающийся тем, что операции с) и d) выполняются тогда, когда рама (1, 301) перемещается вдоль направления ряда растений.
3. Способ по п. 2, отличающийся тем, что операции с) и d) осуществляют с управлением чувствительными средствами (36А, 36В; 41А, 41В; 136; 336, 341А, 341В).
4. Способ по п. 3, отличающийся тем, что операции с) и d) включают перемещение упомянутых захватных элементов (115, 315) вдоль направления, параллельного направлению упомянутых подвижных проволок (F).
5. Сельскохозяйственное транспортное средство, содержащее устройство, реализующее способ по любому из предшествующих пунктов.
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| FR 2897233 A1, 17.08.2007 | |||
| КЕРАМИЧЕСКИЙ КОМПОЗИЦИОННЫЙ МАТЕРИАЛ, СОСТОЯЩИЙ ИЗ ОКСИДА АЛЮМИНИЯ И ОКСИДА ЦИРКОНИЯ В КАЧЕСТВЕ ОСНОВНЫХ КОМПОНЕНТОВ, А ТАКЖЕ ИЗ ДИСПЕРГИРОВАННОЙ ФАЗЫ | 2010 |
|
RU2569525C2 |

