Изобретение относится к радиолокационной технике и может быть использовано в когерентно-импульсных радиолокационных системах для выделения сигналов движущихся целей на фоне пассивных помех при вобуляции периода повторения зондирующих импульсов.
Известно цифровое устройство для подавления пассивных помех [1], содержащее два канала, каждый из которых состоит из трех основных и двух дополнительных перемножителей, сумматора и последовательно соединенных первого и второго блоков памяти, а также вычислительный блок и последовательно соединенные блок измерения фазы и функциональный преобразователь. Однако данное устройство при вобуляции периода повторения из-за сужения полосы задерживания помехи имеет низкую эффективность выделения сигналов движущихся целей.
Другим известным устройством является корреляционный автокомпенсатор [2], который содержит ряд блоков задержки, два перемножителя, сумматор и блок оценки параметров коррелированной помехи. Этому устройству также присущ ряд недостатков, среди которых наиболее существенными являются: низкая эффективность выделения сигналов движущихся целей из-за сужения полосы задерживания пассивной помехи при вобуляции периода повторения и плохое подавление кромок протяженной помехи, что является следствием большой постоянной времени цепи адаптивной обратной связи.
Наиболее близкий к данному изобретению адаптивный режекторный фильтр [3], выбранный в качестве прототипа, содержит первый, второй и третий основные блоки задержки, первый, второй и третий комплексные перемножители, блок измерения фазы, основной весовой блок, блок весовых коэффициентов, основной сумматор и синхрогенератор. Данное устройство не обеспечивает достаточной эффективности выделения сигналов движущихся целей из-за сужения полосы задерживания пассивной помехи при вобуляции периода повторения.
Задачей, решаемой в изобретении, является повышение эффективности режектирования пассивной помехи и выделения сигналов движущихся целей при вобуляции периода повторения на фоне пассивных помех с априорно неизвестной доплеровской скоростью.
Для решения поставленной задачи в адаптивный режекторный фильтр, содержащий первый, второй и третий основные блоки задержки, первый, второй и третий комплексные перемножители, блок измерения фазы, основной весовой блок, блок весовых коэффициентов, основной сумматор и синхрогенератор, введены первый и второй дополнительные блоки задержки, дополнительный сумматор, дополнительный весовой блок и коммутатор.
Дополнительные блоки, введенные в предлагаемое устройство, являются известными. Так, соединенные вместе первый основной блок задержки, первый комплексный перемножитель, блок измерения фазы и дополнительный сумматор применяются для подавления пассивных помех, однако неизвестно их применение совместно с первым и вторым дополнительными блоками задержки и вторым и третьим комплексными перемножителями для более точной компенсации помехи. Новыми являются связи между третьим комплексным перемножителем, дополнительным весовым блоком, блоком весовых коэффициентов, основным сумматором и коммутатором, а также связи между синхрогенератором и остальными блоками адаптивного режекторного фильтра, обеспечивающими соответственно оптимальную и согласованную обработку вобулированной последовательности импульсов, что приводит в сочетании с более точной компенсацией помехи к повышению эффективности выделения сигналов движущихся целей при вобуляции периода повторения на фоне пассивных помех с априорно неизвестной доплеровской скоростью.
Сравнение с техническими решениями, известными из опубликованных источников информации, показывает, что заявляемое решение обладает новизной и имеет изобретательский уровень.
Заявляемое решение носит технический характер, осуществимо, воспроизводимо и, следовательно, является промышленно применимым.
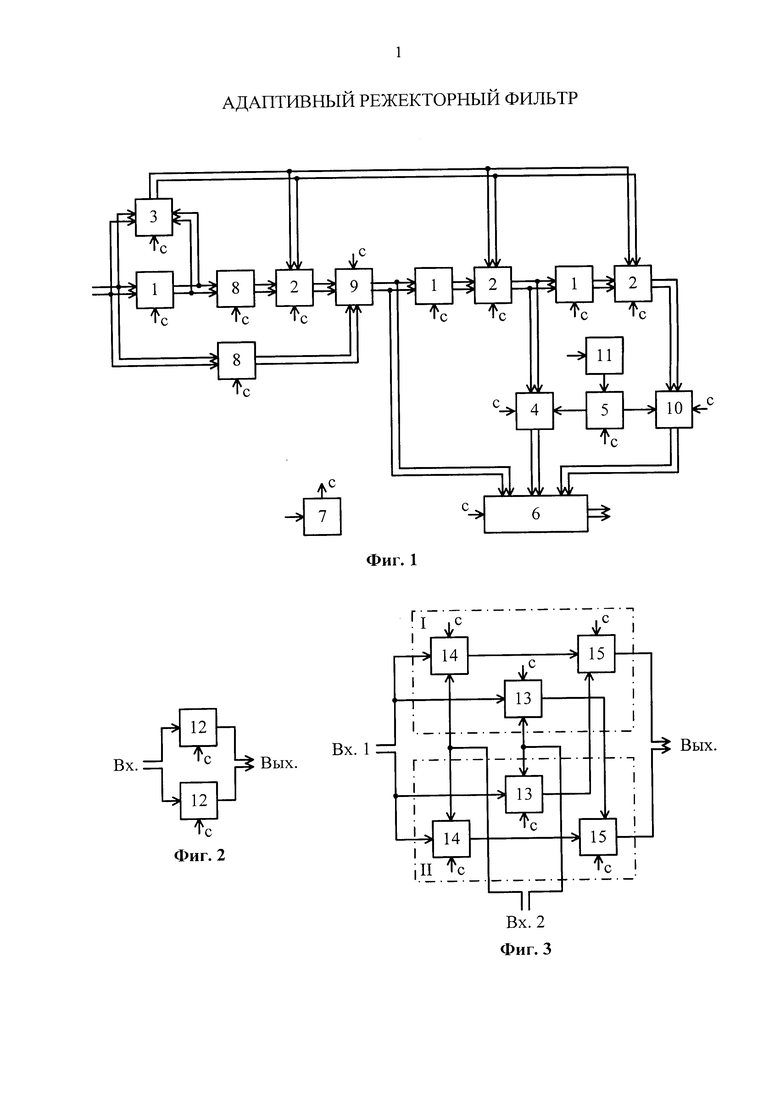
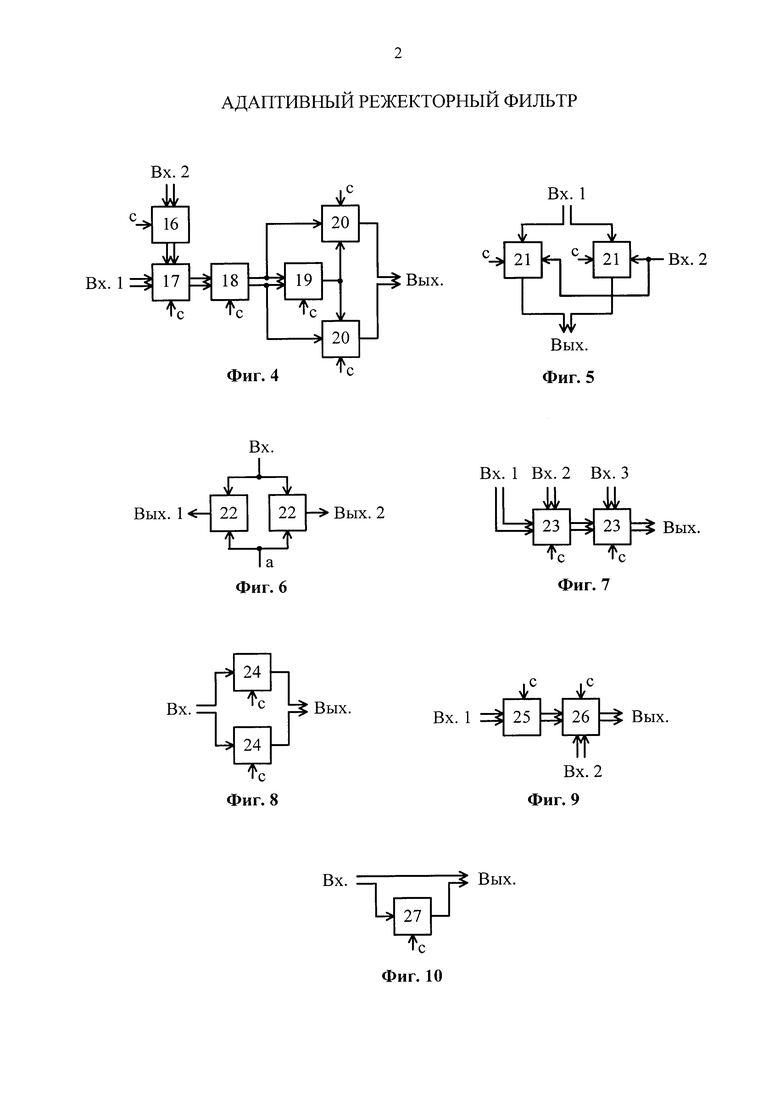
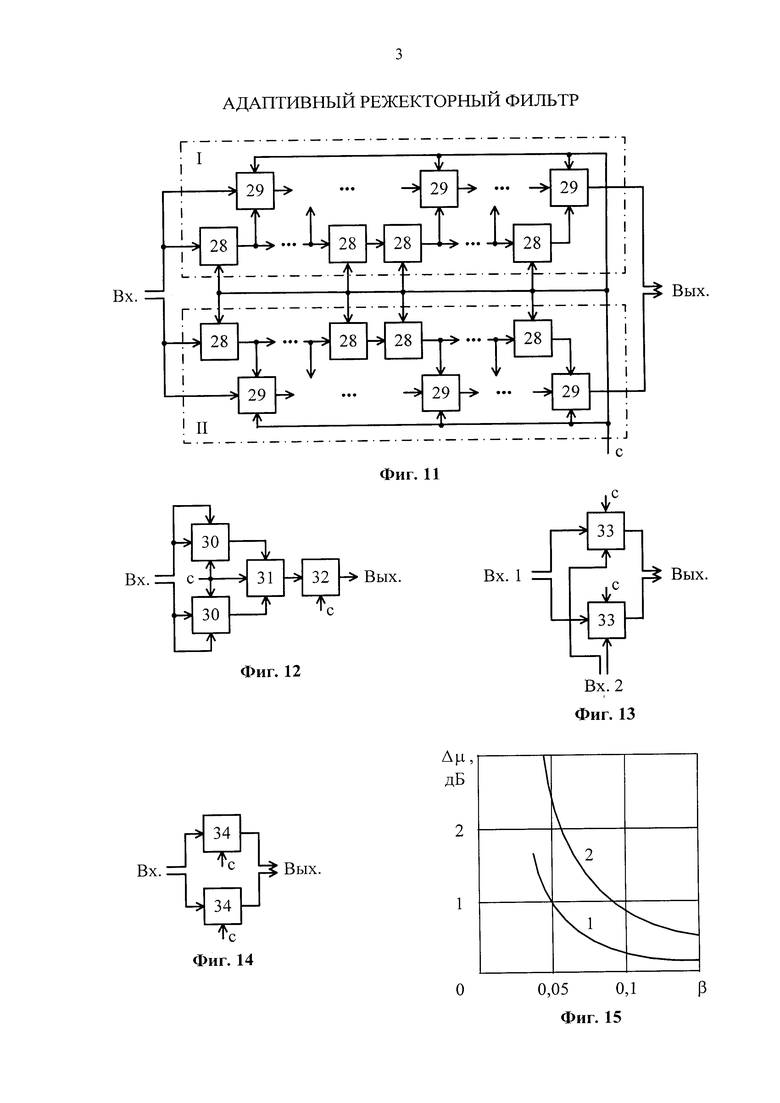
На фиг. 1 представлена структурная электрическая схема адаптивного режекторного фильтра; на фиг. 2 - основного блока задержки; на фиг. 3 - комплексного перемножителя; на фиг. 4 - блока измерения фазы; на фиг. 5 - весового блока; на фиг. 6 - блока весовых коэффициентов; на фиг. 7 - основного сумматора; на фиг. 8 - дополнительного блока задержки; на фиг. 9 - дополнительного сумматора; на фиг. 10 - блока комплексного сопряжения; на фиг. 11 - накопителя; на фиг. 12 - блока вычисления модуля; на фиг. 13 - комплексного сумматора; на фиг. 14 - комплексного инвертора; на фиг. 15 изображены зависимости выигрыша в усредненном по доплеровской фазе сигнала коэффициенте улучшения отношения сигнал/помеха предложенного фильтра по сравнению с прототипом.
Адаптивный режекторный фильтр (фиг. 1) содержит первый, второй и третий основные блоки 1 задержки, первый, второй и третий комплексные перемножители 2, блок 3 измерения фазы, основной весовой блок 4, блок 5 весовых коэффициентов, основной сумматор 6, синхрогенератор 7, первый и второй дополнительные блоки 8 задержки, дополнительный сумматор 9, дополнительный весовой блок 10 и коммутатор 11; основной блок 1 задержки (фиг. 2) содержат два оперативных запоминающих устройства (ОЗУ) 12; комплексный перемножитель 2, 17 (фиг. 3) содержит два канала (I, II), каждый из которых содержит перемножители 13, 14 и сумматор 15; блок 3 измерения фазы (фиг. 4) содержит блок 16 комплексного сопряжения, комплексный перемножитель 17, накопитель 18, блок 19 вычисления модуля и два делителя 20; весовой блок 4, 10 (фиг. 5) содержит два перемножителя 21; блок 5 весовых коэффициентов (фиг. 6) содержит два блока 22 постоянного запоминающего устройства (ПЗУ); основной сумматор 6 (фиг. 7) содержит два комплексных сумматора 23; дополнительный блок 8 задержки (фиг. 8) содержит два ОЗУ 24; дополнительный сумматор 9 (фиг. 9) содержит комплексный инвертор 25 и комплексный сумматор 26; блок 16 комплексного сопряжения (фиг. 10) содержит инвертор 27; накопитель 18 (фиг. 11) содержит два канала (I, II), состоящих из n элементов 28 задержки на интервал tд и n сумматоров 29; блок 19 вычисления модуля (фиг. 12) содержит два перемножителя 30, сумматор 31 и блок 32 извлечения квадратного корня; комплексный сумматор 23, 26 (фиг. 13) содержит два сумматора 33; комплексный инвертор 24 (фиг. 14) содержит два инвертора 34.
Адаптивный режекторный фильтр работает следующим образом.
Пачка когерентных радиоимпульсов, состоящая из пассивной помехи, значительно превышающей сигнал от цели, поступает на вход радиоприемного устройства, в котором усиливается, в квадратурных фазовых детекторах переносится на видеочастоту, а затем подвергается аналого-цифровому преобразованию (соответствующие блоки на фиг. 1 не показаны).
Отсчеты поступают в моменты времени, разделенные p неэквидистантными или неравными временными интервалами T1, T2, …, Ti, …, Tp, и образуют ядро вобуляции, повторяющееся с постоянным периодом вобуляции:
где p - количество периодов повторения в ядре вобуляции.
Цифровые коды (xkl, ykl) обеих квадратурных проекций, следующие через неэквидистантные интервалы T1, T2, …, в каждом элементе разрешения по дальности (кольце дальности) каждого периода повторения образуют последовательность комплексных чисел
Ukl=xkl+iykl=|Ukl|exp(iθkl),
где k - номер текущего периода, l - номер текущего кольца дальности, θkl -текущая фаза (обычно помехи ввиду ее значительного превышения над сигналом), причем
где φ0l - начальная фаза; φjl - доплеровский сдвиг фазы помехи за период Tj, равный φjl=2πfjlTj, здесь fjl - доплеровская частота помехи.
Цифровые отсчеты в заявляемом устройстве (фиг. 1) поступают на входы первого основного блока 1 задержки и на соединенные с ними входы первого дополнительного блока 8 задержки и первые входы блока 3 измерения фазы, на вторые входы которого поступают задержанные цифровые отсчеты, соответствующие предыдущему периоду зондирования.
В блоке 3 измерения фазы (фиг. 4) вычисляются оценки доплеровского сдвига фазы помехи за k-й период повторения (k=1, 2, …) для каждого l-го элемента разрешения по дальности (l=1, 2, …). При этом в блоке 16 комплексного сопряжения с помощью инвертора 27 (фиг. 10) происходит инвертирование знака мнимых проекций. В комплексном перемножителе 17 происходит перемножение соответствующих комплексных чисел, реализуемое путем операций с проекциями этих чисел в соответствии с фиг. 3. Образованные величины

поступают в накопитель 18 (фиг. 11), осуществляющий с помощью элементов 28 задержки и сумматоров 29 скользящее вдоль дальности в каждом периоде повторения суммирование произведений  с n+1 смежных элементов разрешения по дальности временного строба, кроме элемента с номером n/2+1, для чего выходные величины элемента 28 задержки с номером n/2 поступают только на последующий элемент 28 задержки (фиг. 11). При этом на выходах накопителя 18 (фиг. 11) образуются величины
с n+1 смежных элементов разрешения по дальности временного строба, кроме элемента с номером n/2+1, для чего выходные величины элемента 28 задержки с номером n/2 поступают только на последующий элемент 28 задержки (фиг. 11). При этом на выходах накопителя 18 (фиг. 11) образуются величины

где  - оценка сдвига фазы помехи за период Tk, усредненная по n смежным элементам разрешения по дальности.
- оценка сдвига фазы помехи за период Tk, усредненная по n смежным элементам разрешения по дальности.
В блоке 19 вычисления модуля (фиг. 12) определяются величины |Yk|, а затем на выходах делителей 20 (фиг. 4) - величины  , поступающие на первые входы всех комплексных перемножителей 2.
, поступающие на первые входы всех комплексных перемножителей 2.
Каждый из основных блоков 1 задержки (фиг. 2) состоит из параллельно включенных оперативных запоминающих устройств (ОЗУ) 12. Причем каждое ОЗУ 12 служит для хранения значений отсчетов с колец дальности одного квадратурного канала в течение периода.
Особенностью основных блоков 1 задержки, обусловленной переменным периодом повторения импульсов, является использование каждого из ОЗУ 12 для хранения только первых N отсчетов в каждом периоде повторения, где N=(Tmin+τ)/tд - количество колец дальности, соответствующее интервалу Tmin+τ, причем Tmin=min(T1,T2,…) - минимальный период повторения, τ - интервал, равный задержке оценок по отношению к среднему элементу обучающей выборки, исключенному в накопителе 18 (фиг. 11) в соответствии с выражением (1), tд - интервал (период) временной дискретизации.
Величина интервала τ определяется выражением

где tв - время вычисления оценки фазы помехи, n - количество элементов обучающей выборки.
Образованная в блоке 3 измерения фазы величина  перемножается с отсчетами, соответствующими предыдущему периоду зондирования Tk-1, задержанными во втором дополнительном блоке 8 задержки с целью временного согласования вводимых и компенсируемых фазовых сдвигов на интервал τ.
перемножается с отсчетами, соответствующими предыдущему периоду зондирования Tk-1, задержанными во втором дополнительном блоке 8 задержки с целью временного согласования вводимых и компенсируемых фазовых сдвигов на интервал τ.
Первый дополнительный блок 8 задержки служит также для согласования времени прихода прямых и задержанных отсчетов соответственно на первые и вторые входы дополнительного сумматора 9. Каждый из дополнительных блоков 8 задержки (фиг. 8) состоит из параллельно включенных ОЗУ 24.
Дополнительные блоки 8 задержки (фиг. 1, 8) осуществляют задержку входных отсчетов в реальном масштабе времени на интервал τ, определяемый из выражения (2). При этом каждое ОЗУ 24 служит для "скользящего" хранения τ/tд отсчетов.
Последовательное комплексное перемножение задержанных в первом основном 1 и втором дополнительном 8 блоках задержки отсчетов Uk-1, l на величину  приводит к синфазности отсчетов помехи на входах дополнительного сумматора 9, на первые входы которого поступают отсчеты Ukl, задержанные в первом дополнительном блоке 8 задержки. В дополнительном сумматоре 9 (фиг. 1) происходит раздельное вычитание (фиг. 9, 13, 14) одноименных проекций последовательности обрабатываемых отсчетов и образование на выходе дополнительного сумматора 9 величины
приводит к синфазности отсчетов помехи на входах дополнительного сумматора 9, на первые входы которого поступают отсчеты Ukl, задержанные в первом дополнительном блоке 8 задержки. В дополнительном сумматоре 9 (фиг. 1) происходит раздельное вычитание (фиг. 9, 13, 14) одноименных проекций последовательности обрабатываемых отсчетов и образование на выходе дополнительного сумматора 9 величины

Затем путем последовательного комплексного перемножения задержанных во втором и третьем основных блоках 1 задержки отсчетов Vk-1, l и  на величину
на величину  достигается синфазность отсчетов помехи на входах основного сумматора 6, на первые входы которого поступают отсчеты Vkl. В основном 4 и дополнительном 10 весовых блоках (фиг. 1) осуществляется скалярное умножение проекций на весовые коэффициенты g1 и g2 (фиг. 5), поступающие соответственно с первого и второго выходов блока 5 весовых коэффициентов (фиг. 1, 6). В основном сумматоре 6 (фиг. 1) происходит раздельное суммирование (фиг. 7, 13) одноименных проекций взвешенной последовательности обрабатываемых отсчетов и образование выходной величины фильтра
достигается синфазность отсчетов помехи на входах основного сумматора 6, на первые входы которого поступают отсчеты Vkl. В основном 4 и дополнительном 10 весовых блоках (фиг. 1) осуществляется скалярное умножение проекций на весовые коэффициенты g1 и g2 (фиг. 5), поступающие соответственно с первого и второго выходов блока 5 весовых коэффициентов (фиг. 1, 6). В основном сумматоре 6 (фиг. 1) происходит раздельное суммирование (фиг. 7, 13) одноименных проекций взвешенной последовательности обрабатываемых отсчетов и образование выходной величины фильтра

Использование текущих оценок позволяет адаптироваться к аргументу реальной корреляционной функции помехи. Последовательный двумерный поворот поступающих отсчетов в комплексных перемножителях 2 (фиг. 1) на угол  компенсирует межпериодные доплеровские сдвиги фазы помехи и обеспечивает синфазность входных величин основного 6 и дополнительного 9 сумматоров, что приводит к смещению зон подавления на величину доплеровской частоты помехи, что является необходимым условием ее эффективного режектирования.
компенсирует межпериодные доплеровские сдвиги фазы помехи и обеспечивает синфазность входных величин основного 6 и дополнительного 9 сумматоров, что приводит к смещению зон подавления на величину доплеровской частоты помехи, что является необходимым условием ее эффективного режектирования.
При весовой обработке вобулированной последовательности импульсов с постоянными коэффициентами из-за сужения полосы задерживания имеет место снижение подавления помехи. В целях исключения этого явления используется весовая обработка с переменными во времени весовыми коэффициентами. Так, для системы двукратной череспериодной компенсации весовые коэффициенты определяются в соответствии с выражениями

где k - номер текущего периода.
Таким образом, в соответствии с количеством периодов повторения в ядре вобуляции p пар весовых коэффициентов  хранятся в соответствующих ячейках двух блоков 22 ПЗУ (фиг. 6) блока 5 весовых коэффициентов. Как видно из выражения (3), коэффициент g2 отличен от единицы, что объясняет необходимость введения дополнительного весового блока 10. Кроме того, весовые коэффициенты являются переменными во времени в соответствии с законом вобуляции, что приводит к необходимости их коммутации.
хранятся в соответствующих ячейках двух блоков 22 ПЗУ (фиг. 6) блока 5 весовых коэффициентов. Как видно из выражения (3), коэффициент g2 отличен от единицы, что объясняет необходимость введения дополнительного весового блока 10. Кроме того, весовые коэффициенты являются переменными во времени в соответствии с законом вобуляции, что приводит к необходимости их коммутации.
Выбор необходимой пары весовых коэффициентов осуществляется коммутатором 11, формирующим в каждом периоде повторения адрес соответствующих ячеек блоков 22 ПЗУ (фиг. 1, 6) с помощью импульсов, поступающих от синхронизатора радиолокатора (на фиг. 1 не показан).
Синхронизация адаптивного режекторного фильтра осуществляется подачей на все блоки заявляемого устройства последовательности синхронизирующих импульсов, вырабатываемых синхрогенератором 7 (фиг. 1), управляемым импульсами синхронизатора радиолокатора, следующими поочередно с интервалами T1, T2, …. Период повторения синхронизирующих импульсов равен интервалу временной дискретизации tд, выбираемому из условия требуемой разрешающей способности по дальности.
На фиг. 15 изображены зависимости выигрыша Δµ в усредненном по доплеровской фазе сигнала коэффициенте улучшения отношения сигнал/помеха предложенного фильтра по сравнению с прототипом от нормированной ширины спектра помехи β=ΔfTср для двух значений глубины вобуляции (12,5% - кривая 1; 25%. - кривая 2). Кривые построены для случая p=2. Величина выигрыша зависит от параметров закона вобуляции и ширины спектра помехи.
Таким образом, адаптивный режекторный фильтр повышает эффективность режектирования пассивной помехи и выделения сигналов движущихся целей при вобуляции периода повторения на фоне пассивных помех с априорно неизвестной доплеровской скоростью.
Библиография
1. А.с. СССР 743208, МПК G01S 7/36. Цифровое устройство для подавления пассивных помех / Д.И. Попов. - №2540079/09; заявл. 03.11.1977; опубл. 25.06.1980, Бюл. №23 - 4 с.
2. Радиоэлектронные системы: основы построения и теория. Справочник / Я.Д. Ширман, С.Т. Багдасарян, А.С. Маляренко, Д.И. Леховицкий [и др.]; под ред Я.Д. Ширмана. - 2-е изд., перераб. и доп. - М.: Радиотехника, 2007; с. 439, рис. 25.22.
3. А.с. СССР 934816, МПК G01S 7/36, G01S 13/52. Режекторный фильтр / Д.И. Попов. - №2999628/09; заявл. 30.10.1980; опубл. 27.11.1998, Бюл. №33. - 20 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЫЧИСЛИТЕЛЬ ДЛЯ АДАПТИВНОГО РЕЖЕКТИРОВАНИЯ ПОМЕХ | 2015 |
|
RU2582871C1 |
| АДАПТИВНЫЙ РЕЖЕКТОР ПАССИВНЫХ ПОМЕХ | 2015 |
|
RU2599621C1 |
| АДАПТИВНЫЙ ВЫЧИСЛИТЕЛЬ ДЛЯ РЕЖЕКТИРОВАНИЯ ПОМЕХ | 2015 |
|
RU2582874C1 |
| АДАПТИВНЫЙ РЕЖЕКТОРНЫЙ ФИЛЬТР | 2017 |
|
RU2660645C1 |
| ВЫЧИСЛИТЕЛЬ ДЛЯ РЕЖЕКТОРНОЙ ФИЛЬТРАЦИИ ПОМЕХ | 2017 |
|
RU2686634C1 |
| ВЫЧИСЛИТЕЛЬ ДЛЯ РЕЖЕКТОРНОЙ ФИЛЬТРАЦИИ ПОМЕХ | 2017 |
|
RU2686633C1 |
| РЕЖЕКТОРНЫЙ ФИЛЬТР | 2024 |
|
RU2825253C1 |
| РЕЖЕКТОРНЫЙ ФИЛЬТР | 2016 |
|
RU2641647C1 |
| ВЫЧИСЛИТЕЛЬ ДЛЯ РЕЖЕКТОРНОЙ ФИЛЬТРАЦИИ ПОМЕХ | 2017 |
|
RU2646330C1 |
| РЕЖЕКТОРНЫЙ ФИЛЬТР | 2021 |
|
RU2759150C1 |
Изобретение относится к радиолокационной технике и предназначено для выделения сигналов движущихся целей на фоне пассивных помех при вобуляции периода повторения зондирующих импульсов. Технический результат заключается в повышении эффективности выделения сигналов движущихся целей. Указанный результат достигается тем, что адаптивный режекторный фильтр содержит первый, второй и третий основные блоки задержки, первый, второй и третий комплексные перемножители, блок измерения фазы, основной весовой блок, блок весовых коэффициентов, основной сумматор, синхрогенератор, первый и второй дополнительные блоки задержки, дополнительный сумматор, дополнительный весовой блок и коммутатор, определенным образом соединенные между собой и осуществляющие когерентную обработку исходных отсчетов. 15 ил.
Адаптивный режекторный фильтр, содержащий первый, второй и третий основные блоки задержки, первый, второй и третий комплексные перемножители, блок измерения фазы, основной весовой блок, блок весовых коэффициентов, основной сумматор и синхрогенератор, при этом входы первого основного блока задержки соединены с первыми входами блока измерения фазы, вторые входы которого соединены с выходами первого основного блока задержки, выходы блока измерения фазы соединены с первыми входами первого, второго и третьего комплексных перемножителей, выходы второго основного блока задержки соединены со вторыми входами второго комплексного перемножителя, выходы которого соединены со входами третьего основного блока задержки, выходы которого соединены со вторыми входами третьего комплексного перемножителя, входы второго основного блока задержки соединены с первыми входами основного сумматора, выходы второго комплексного перемножителя соединены с первыми входами основного весового блока, выходы которого соединены со вторыми входами основного сумматора, первый выход блока весовых коэффициентов соединен со вторым входом основного весового блока, выход синхрогенератора соединен с синхровходами первого, второго и третьего основных блоков задержки, первого, второго и третьего комплексных перемножителей, блока измерения фазы, основного весового блока, блока весовых коэффициентов и основного сумматора, отличающийся тем, что введены первый и второй дополнительные блоки задержки, дополнительный сумматор, дополнительный весовой блок и коммутатор, при этом входы первого основного блока задержки соединены со входами первого дополнительного блока задержки, выходы которого соединены с первыми входами дополнительного сумматора, выходы первого основного блока задержки соединены со входами второго дополнительного блока задержки, выходы которого соединены со вторыми входами первого комплексного перемножителя, выходы которого соединены со вторыми входами дополнительного сумматора, выходы дополнительного сумматора соединены со входами второго основного блока задержки, выходы третьего комплексного перемножителя соединены с первыми входами дополнительного весового блока, выходы которого соединены с третьими входами основного сумматора, второй вход дополнительного весового блока соединен со вторым выходом блока весовых коэффициентов, выход коммутатора соединен с адресным входом блока весовых коэффициентов, выход синхрогенератора соединен с синхровходами первого и второго дополнительных блоков задержки, дополнительного сумматора и дополнительного весового блока, причем входами адаптивного режекторного фильтра являются входы первого основного блока задержки, а выходами - выходы основного сумматора.
| РЕЖЕКТОРНЫЙ ФИЛЬТР | 1980 |
|
SU934816A1 |
| Режекторный фильтр | 1981 |
|
SU1001488A2 |
| WO 2013181114 A1, 05.12.2013 | |||
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |

