Изобретение относится к вычислительной технике и может быть использовано в автоматизированных когерентно-импульсных системах для выделения сигналов движущихся целей на фоне пассивных помех с априорно неизвестными спектрально-корреляционными свойствами при вобуляции периода повторения зондирующих импульсов.
Известно цифровое устройство для подавления пассивных помех [1], содержащее два канала, каждый из которых содержит три основных перемножителя, сумматор, первый и второй блоки памяти, первый и второй дополнительные перемножители, а также блок измерения фазы, функциональный преобразователь, вычислительный блок, блок измерения коэффициента корреляции и блок вычисления весового коэффициента. Однако это устройство имеет низкую эффективность выделения сигналов движущихся целей из-за сужения полосы задерживания помехи при вобуляции периода повторения, что является следствием отсутствия возможности адаптации весовых коэффициентов устройства к нестационарности временных интервалов в пределах периода вобуляции.
Другим известным устройством является корреляционный автокомпенсатор [2], который содержит ряд блоков задержки, два перемножителя, сумматор и блок оценки параметров коррелированной помехи. Этому устройству также присущ ряд недостатков, среди которых наиболее существенными являются: низкая эффективность выделения сигналов движущихся целей из-за сужения полосы задерживания пассивной помехи при вобуляции периода повторения и плохое подавление кромок протяженной помехи, что является следствием большой постоянной времени цепи адаптивной обратной связи.
Наиболее близким к предлагаемому техническому решению является выбранный в качестве прототипа цифровой адаптивный вычислитель для режектирования помех [3], который содержит автокомпенсатор доплеровской фазы пассивных помех, первый и второй блоки задержки на период повторения, основной блок измерения коэффициента корреляции, блок вычисления весовых коэффициентов, основной весовой блок, основной сумматор и синхрогенератор. Однако данное устройство не обеспечивает достаточной эффективности выделения сигналов движущихся целей на фоне пассивных помех с априорно неизвестными спектрально-корреляционными свойствами из-за сужения полосы задерживания пассивной помехи при вобуляции периода повторения и отсутствия адаптации весовых коэффициентов фильтра к свойствам помехи при нестационарности временных интервалов.
Задачей, решаемой в предлагаемом изобретении, является повышение эффективности режектирования пассивной помехи и выделения сигналов движущихся целей при вобуляции периода повторения на фоне пассивных помех с априорно неизвестными спектрально-корреляционными свойствами.
Для решения поставленной задачи в адаптивный вычислитель для режектирования помех, содержащий автокомпенсатор, первый и второй блоки задержки, основной блок измерения коэффициента корреляции, блок вычисления весовых коэффициентов, основной весовой блок, основной сумматор и синхрогенератор, при этом выходы автокомпенсатора соединены с одноименными входами первого блока задержки, первыми входами основного блока измерения коэффициента корреляции и первыми входами основного сумматора; выходы первого блока задержки соединены с одноименными входами второго блока задержки, вторыми входами основного блока измерения коэффициента корреляции и первыми входами основного весового блока, выходы которого соединены с одноименными вторыми входами основного сумматора; выход основного блока измерения коэффициента корреляции соединен с первым входом блока вычисления весовых коэффициентов, первый выход которого соединен со вторым входом основного весового блока; выход синхрогенератора соединен с синхровходами автокомпенсатора, первого и второго блоков задержки, основного блока измерения коэффициента корреляции, блока вычисления весовых коэффициентов, основного весового блока и основного сумматора; введены дополнительный блок измерения коэффициента корреляции, цифровая линия задержки и дополнительный весовой блок, при этом первые входы дополнительного блока измерения коэффициента корреляции соединены с одноименными первыми входами основного блока измерения коэффициента корреляции; вторые входы дополнительного блока измерения коэффициента корреляции соединены с одноименными выходами второго блока задержки и первыми входами дополнительного весового блока, выходы которого соединены с одноименными третьими входами основного сумматора; вход цифровой линии задержки соединен с выходом основного блока измерения коэффициента корреляции; выход цифровой линии задержки соединен со вторым входом блока вычисления весовых коэффициентов, третий вход которого соединен с выходом дополнительного блока измерения коэффициента корреляции, а второй выход - со вторым входом дополнительного весового блока; синхровходы дополнительного блока измерения коэффициента корреляции, цифровой линии задержки и дополнительного весового блока соединены с выходом синхрогенератора; причем входами адаптивного вычислителя для режектирования помех являются входы автокомпенсатора, а выходами - выходы основного сумматора.
Дополнительные блоки, введенные в предлагаемое устройство, и связи их с остальными блоками вычислителя позволяют осуществить адаптацию к спектрально-корреляционным свойствам помехи с учетом вобуляции периода повторения, что является необходимым и достаточным условием ее эффективного режектирования.
Сравнение с техническими решениями, известными из опубликованных источников информации, показывает, что заявляемое техническое решение содержит новую совокупность отличительных признаков и, следовательно, обладает новизной и имеет изобретательский уровень.
Заявляемое решение носит технический характер, осуществимо, воспроизводимо и, следовательно, является промышленно применимым.
Сущность заявляемого технического решения поясняется соответствующими чертежами и графиками.
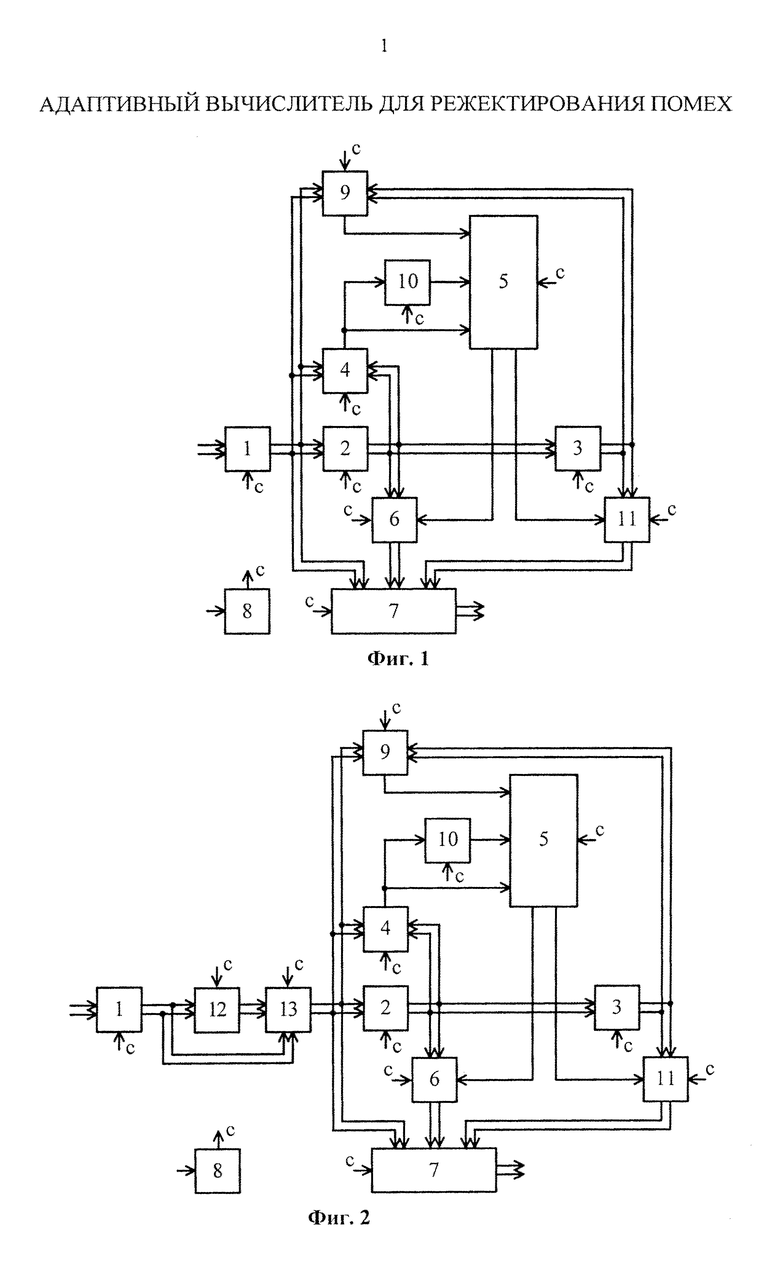
На фиг. 1 представлена структурная электрическая схема адаптивного вычислителя для режектирования помех (АВДРП); на фиг. 2 - частного варианта выполнения АВДРП; на фиг. 3 - автокомпенсатора; на фиг. 4 - блока задержки; на фиг. 5 - основного и дополнительных блоков измерения коэффициента корреляции; на фиг. 6 - весового блока; на фиг. 7 - основного сумматора; на фиг. 8 - дополнительного сумматора; на фиг. 9 - блока задерживания; на фиг. 10 - блока измерения фазы; на фиг. 11 - комплексного перемножителя; на фиг. 12 - блока комплексного сопряжения; на фиг. 13 - комплексного накопителя; на фиг. 14 - блока объединения квадратур; фиг. 15 - накопителя; на фиг. 16 - комплексного сумматора; на фиг. 17 - комплексного инвертора; на фиг. 18 изображены зависимости выигрыша в усредненном по доплеровской фазе сигнала коэффициенте улучшения отношения сигнал/помеха предложенного адаптивного вычислителя по сравнению с прототипом.
Адаптивный вычислитель для режектирования помех (фиг. 1) содержит автокомпенсатор 1, первый 2 и второй 3 блоки задержки, основной блок 4 измерения коэффициента корреляции, блок 5 вычисления весовых коэффициентов, основной весовой блок 6, основной сумматор 7, синхрогенератор 8, дополнительный блок 9 измерения коэффициента корреляции, цифровую линию 10 задержки и дополнительный весовой блок 11; при этом выходы автокомпенсатора 1 соединены с одноименными входами первого блока 2 задержки, первыми входами основного блока 4 измерения коэффициента корреляции и первыми входами основного сумматора 7, выходы первого блока 2 задержки соединены с одноименными входами второго блока 3 задержки, вторыми входами основного блока 4 измерения коэффициента корреляции и первыми входами основного весового блока 6, выходы которого соединены со вторыми входами основного сумматора 7, выход основного блока 4 измерения коэффициента корреляции соединен с первым входом блока 5 вычисления весовых коэффициентов, первый выход которого соединен со вторым входом основного весового блока 6, первые входы дополнительного блока 9 измерения коэффициента корреляции соединены с одноименными первыми входами основного блока 4 измерения коэффициента корреляции, вторые входы дополнительного блока 9 измерения коэффициента корреляции соединены с одноименными выходами второго блока 3 задержки и первыми входами дополнительного весового блока 11, выходы которого соединены с третьими входами основного сумматора 7, вход цифровой линии 10 задержки соединен с выходом основного блока 4 измерения коэффициента корреляции, выход цифровой линии 10 задержки соединен со вторым входом блока 5 вычисления весовых коэффициентов, третий вход которого соединен с выходом дополнительного блока 9 измерения коэффициента корреляции, а второй выход - со вторым входом дополнительного весового блока 11, выход синхрогенератора 8 соединен с синхровходами автокомпенсатора 1, первого 2 и второго 3 блоков задержки, основного блока 4 измерения коэффициента корреляции, блока 5 вычисления весовых коэффициентов, основного весового блока 6, основного сумматора 7, дополнительного блока 9 измерения коэффициента корреляции, цифровой линии 10 задержки и дополнительного весового блока 11.
Частный вариант выполнения адаптивного вычислителя для режектирования помех (фиг. 2) отличается тем, что в АВДРП на фиг. 1 дополнительно введены третий блок 12 задержки и дополнительный сумматор 13, при этом входы третьего блока 12 задержки соединены с одноименными выходами автокомпенсатора 1 и первыми входами дополнительного сумматора 13, вторые входы которого соединены с выходами третьего блока 12 задержки, а выходы - с одноименными входами первого блока 2 задержки, первыми входами основного блока 4 измерения коэффициента корреляции, первыми входами дополнительного блока 9 измерения коэффициента корреляции и первыми входами основного сумматора 7, выход синхрогенератора 8 соединен с синхровходами третьего блока 12 задержки и дополнительного сумматора 13.
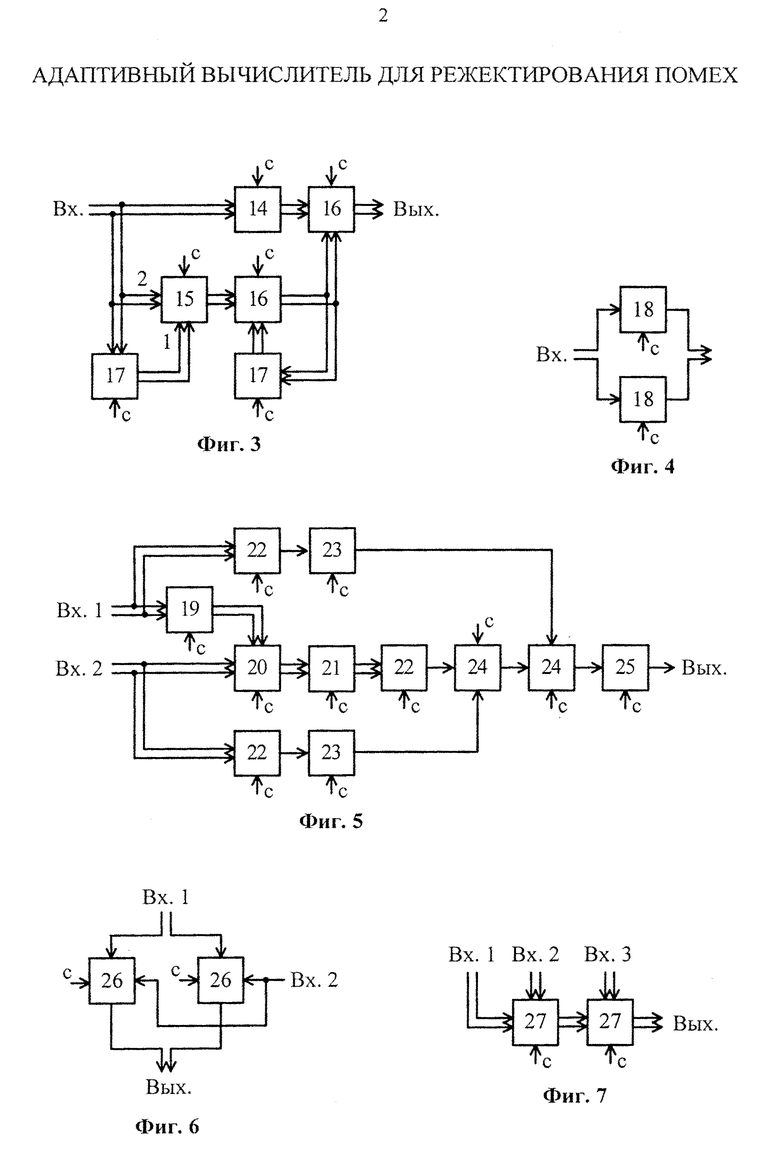
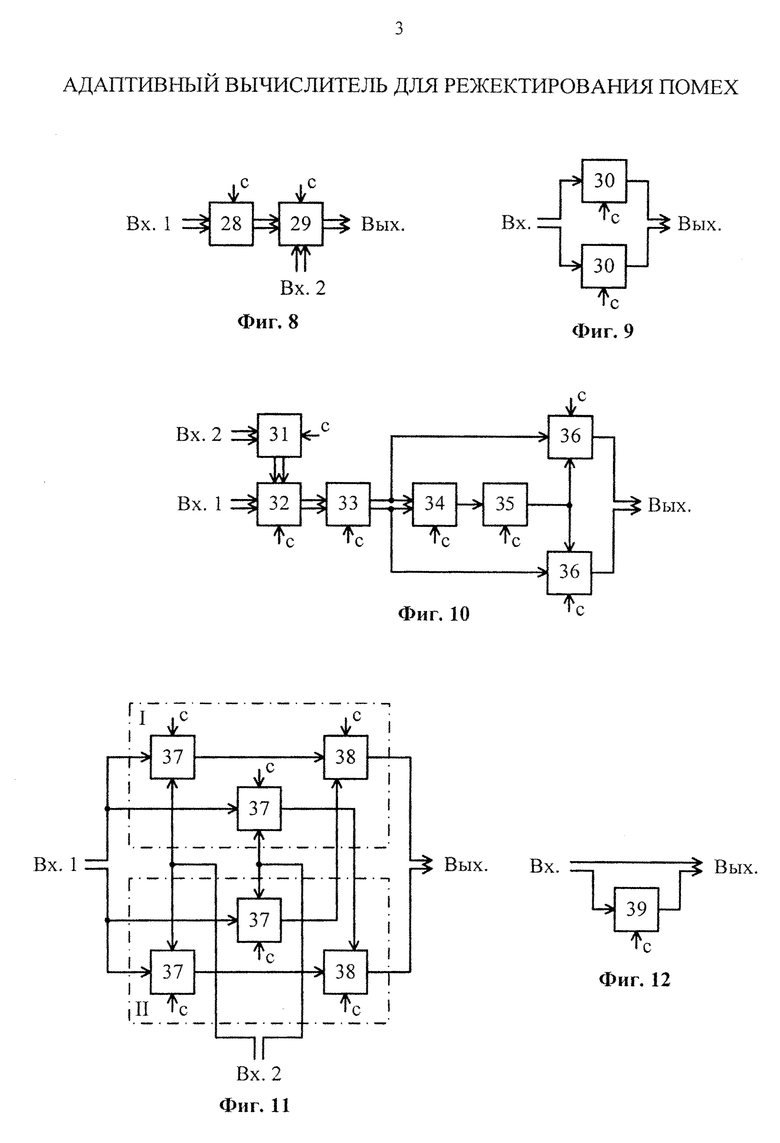
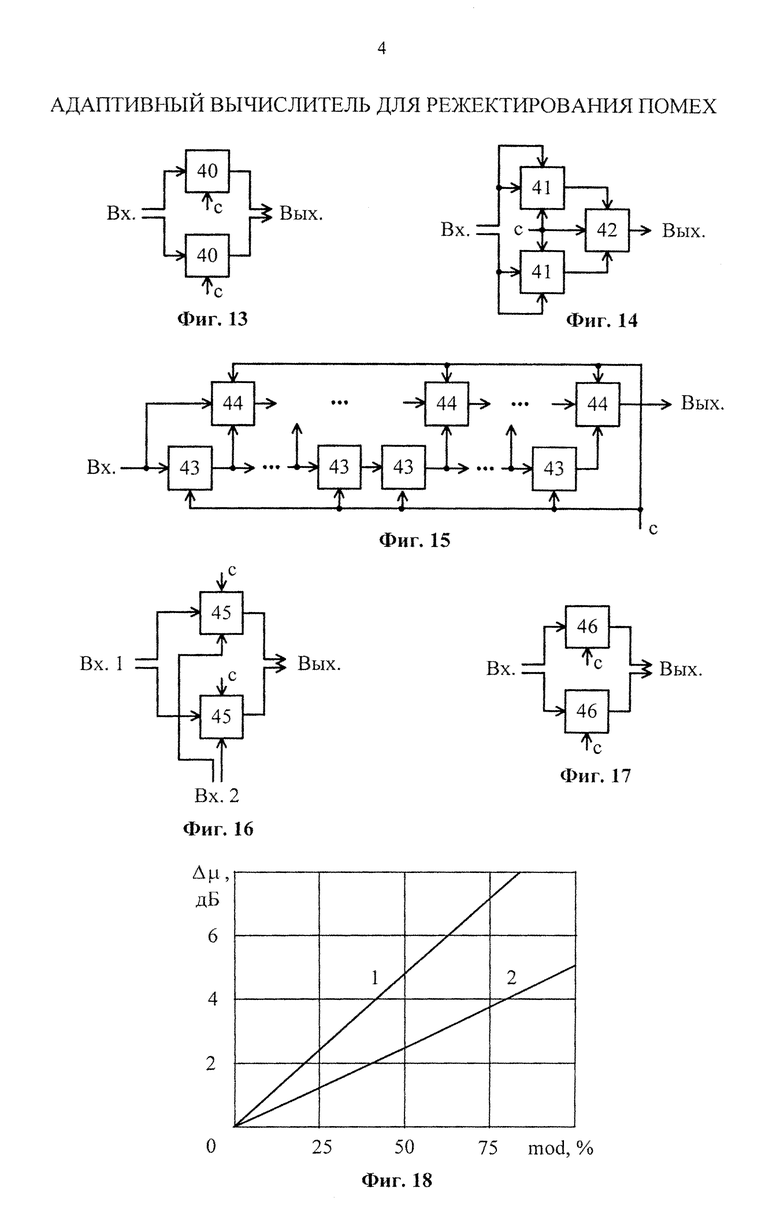
Автокомпенсатор 1 (фиг. 3) содержит блок 14 задерживания, первый и второй комплексные перемножители 15, блок 16 измерения фазы и первый и второй блоки 17 задержки; блок 2, 3, 12, 17 задержки (фиг. 4) содержит два оперативных запоминающих устройства (ОЗУ) 18; основной 4 и дополнительный 9 блоки измерения коэффициента корреляции (фиг. 5) содержат блок 19 комплексного сопряжения, комплексный перемножитель 20, комплексный накопитель 21, три блока 22 объединения квадратур, два накопителя 23, два делителя 24 и блок 25 извлечения квадратного корня; весовой блок 6, 11 (фиг. 6) содержит два перемножителя 26; основной сумматор 7 (фиг. 7) содержит два комплексных сумматора 27; дополнительный сумматор 13 (фиг. 8) содержит комплексный инвертор 28 и комплексный сумматор 29; блок 14 задерживания (фиг. 9) содержит два ОЗУ 30; блок 16 измерения фазы (фиг. 10) содержит блок 31 комплексного сопряжения, комплексный перемножитель 32, комплексный накопитель 33, блок 34 объединения квадратур, блок 35 извлечения квадратного корня и два делителя 36; комплексный перемножитель 15, 20, 32 (фиг. 11) содержит два канала (I и II), каждый из которых состоит из двух перемножителей 37 и сумматора 38; блок 19, 31 комплексного сопряжения (фиг. 12) содержит инвертор 39; комплексный накопитель 21, 33 (фиг. 13) содержит два накопителя 40; блок 22, 34 объединения квадратур (фиг. 14) содержит два перемножителя 41 и сумматор 42; накопитель 23, 40 (фиг. 15) содержит канал, состоящий из n элементов задержки 43 на интервал tд и n сумматоров 44; комплексный сумматор 27, 29 (фиг. 16) содержит два сумматора 45; комплексный инвертор 28 (фиг. 17) содержит два инвертора 46.
Адаптивный вычислитель для режектирования помех работает следующим образом.
Пачка когерентных радиоимпульсов, состоящая из пассивной помехи, значительно превышающей сигнал от цели, поступает на вход радиоприемного устройства, в котором усиливается, в квадратурных фазовых детекторах переносится на видеочастоту, а затем подвергается аналого-цифровому преобразованию (соответствующие блоки на фиг. 1 не показаны).
Отсчеты поступают в моменты времени, разделенные р неэквидистантными или неравными временными интервалами Т1, Т2, …, Ti, …, Тр, и образуют ядро вобуляции, повторяющееся с постоянным периодом вобуляции:
 ,
,
где р - количество периодов повторения в ядре вобуляции.
Цифровые коды (xkl, ykl) обеих квадратурных проекций, следующие через неэквидистантные интервалы T1, T2, …, в каждом элементе разрешения по дальности (кольце дальности) каждого периода повторения образуют последовательность комплексных чисел
 ,
,
где k - номер текущего периода, l - номер текущего кольца дальности, θkl - текущая фаза (обычно помехи, ввиду ее значительного превышения над сигналом), причем
 ,
,
где φ0l - начальная фаза; φjl - доплеровский сдвиг фазы помехи за период Tj, равный φjl=2πfjlTj, здесь fjl - доплеровская частота помехи.
Цифровые отсчеты в заявляемом вычислителе (фиг. 1) поступают на входы автокомпенсатора (АК) 1, в котором осуществляется адаптивная компенсация непосредственно доплеровского смещения спектра помехи. Для реализации этого во временной области измеряется полный доплеровский сдвиг фазы помехи за поступившее число периодов. При этом используются текущие данные двух смежных периодов повторения Tk-1 и Tk, поступающие с n+1 смежных элементов разрешения по дальности и образующие обучающую выборку  .
.
Структурная схема АК представлена на фиг. 3. В блоке 16 измерения фазы (фиг. 10) по входным отсчетам Ukl и задержанным в первом блоке 17 задержки отсчетам Uk-1,l вычисляются оценки доплеровского сдвига фазы помехи за k-й период повторения (k=1, 2, …) для каждого l-го элемента разрешения по дальности (l=1, 2, …). При этом в блоке 31 комплексного сопряжения с помощью инвертора 39 (фиг. 12) происходит инвертирование знака мнимых проекций. В комплексном перемножителе 32 происходит перемножение соответствующих комплексных чисел, реализуемое путем операций с проекциями этих чисел в соответствии с фиг. 11. Образованные величины
 ,
,
поступают в комплексный накопитель 33 (фиг. 13), состоящий из накопителей 40 (фиг. 15), осуществляющих с помощью элементов 43 задержки и сумматоров 44 скользящее вдоль дальности в каждом периоде повторения суммирование произведений  с n+1 смежных элементов разрешения по дальности временного строба, кроме элемента с номером j=l, для чего выходные величины элемента 43 задержки с номером n/2 поступают только на последующий элемент 43 задержки (фиг. 15). При этом на выходах накопителя 33 (фиг. 13) образуются величины
с n+1 смежных элементов разрешения по дальности временного строба, кроме элемента с номером j=l, для чего выходные величины элемента 43 задержки с номером n/2 поступают только на последующий элемент 43 задержки (фиг. 15). При этом на выходах накопителя 33 (фиг. 13) образуются величины

где  - оценка сдвига фазы помехи за период Tk для l-го элемента разрешения по дальности, усредненная по n смежным элементам разрешения; n - объем обучающей выборки.
- оценка сдвига фазы помехи за период Tk для l-го элемента разрешения по дальности, усредненная по n смежным элементам разрешения; n - объем обучающей выборки.
В блоке 34 объединения квадратур (фиг. 14) определяются величины  , в блоке 35 извлечения квадратного корня - величины
, в блоке 35 извлечения квадратного корня - величины  , а затем на выходах делителей 36 (фиг. 10) - величины
, а затем на выходах делителей 36 (фиг. 10) - величины  , поступающие на первые входы второго комплексного перемножителя 15 (фиг. 3). В результате их перемножения с выходными отсчетами второго блока 17 задержки образуются величины
, поступающие на первые входы второго комплексного перемножителя 15 (фиг. 3). В результате их перемножения с выходными отсчетами второго блока 17 задержки образуются величины
 ,
,
В первом комплексном перемножителе 15 (фиг. 3) эти величины перемножаются с исходными отсчетами  , задержанными блоком 14 задерживания (фиг. 3) с целью временного согласования вводимых и компенсируемых фазовых сдвигов на интервал т, равный задержке оценок по отношению к среднему элементу обучающей выборки.
, задержанными блоком 14 задерживания (фиг. 3) с целью временного согласования вводимых и компенсируемых фазовых сдвигов на интервал т, равный задержке оценок по отношению к среднему элементу обучающей выборки.
Величина интервала τ определяется выражением

где tв - время вычисления оценки фазы помехи, n - количество элементов обучающей выборки, tд - интервал (период) временной дискретизации.
Образованные на выходе автокомпенсатора 1 (фиг. 1, 3) величины  с точностью до погрешностей измерения оценки
с точностью до погрешностей измерения оценки  не содержат доплеровского сдвига фазы помехи, что позволяет осуществлять последующее режектирование помехи вычислителем (фильтром) с действительными весовыми коэффициентами.
не содержат доплеровского сдвига фазы помехи, что позволяет осуществлять последующее режектирование помехи вычислителем (фильтром) с действительными весовыми коэффициентами.
Использование текущих оценок  позволяет адаптироваться к аргументу реальной корреляционной функции помехи, что является необходимым условием ее эффективного режектирования.
позволяет адаптироваться к аргументу реальной корреляционной функции помехи, что является необходимым условием ее эффективного режектирования.
В основном 6 и дополнительном 11 весовых блоках (фиг. 1) осуществляется скалярное умножение проекций на весовые коэффициенты g1 и g2 (фиг. 6), поступающие соответственно с первого и второго выходов блока 5 вычисления весовых коэффициентов (фиг. 1). В основном сумматоре 7 (фиг. 1) происходит раздельное суммирование (фиг. 7, 16) одноименных проекций взвешенной последовательности обрабатываемых отсчетов и образование выходной величины вычислителя  .
.
При выборе весовых коэффициентов по адаптивным алгоритмам вычислителя-прототипа [3] реализуются предельные возможности выделения сигнала на фоне поступающей помехи при постоянном периоде повторения. Однако при использовании этих алгоритмов для расчета весовых коэффициентов при вобуляции периода повторения имеет место эффект снижения коэффициента подавления помехи тем больший, чем выше индекс (глубина) вобуляции. В случае вобуляции периода повторения весовые коэффициенты фильтра должны вычисляться согласно новым адаптивным алгоритмам, в частности для вычислителя (фильтра) второго порядка (m=2), имеющим вид

где  ,
,  и
и  _ оценки коэффициентов межпериодной корреляции помехи.
_ оценки коэффициентов межпериодной корреляции помехи.
Оценка вычисляется в основном блоке 4 измерения коэффициента корреляции (фиг. 1, 5). Цифровая линия 10 задержки оценки позволяет получить оценку  где k - номер текущего периода. Оценка р13 вычисляется в дополнительном блоке 9 измерения коэффициента корреляции (фиг. 1, 5). Блоки 4, 9 измерения коэффициента корреляции выполняются в соответствии с фиг. 5 и реализуют алгоритм оценивания
где k - номер текущего периода. Оценка р13 вычисляется в дополнительном блоке 9 измерения коэффициента корреляции (фиг. 1, 5). Блоки 4, 9 измерения коэффициента корреляции выполняются в соответствии с фиг. 5 и реализуют алгоритм оценивания
 .
.
На основании полученных оценок коэффициентов межпериодной корреляции помехи , и блок 5 вычисления весовых коэффициентов (фиг. 1) реализует алгоритмы (3). Данный блок представляет собой арифметико-логическое устройство или сигнальный процессор.
Каждый из блоков 2, 3, 12, 17 задержки (фиг. 1, 2, 4) состоит из параллельно включенных ОЗУ 18. Причем каждое ОЗУ 18 служит для хранения значений отсчетов с колец дальности одного квадратурного канала в течение периода. При этом каждое ОЗУ 18 блоков 2, 3, 12, 17 задержки используется для хранения только N первых отсчетов в каждом периоде повторения, где N=Tmin/fд - количество колец дальности, соответствующее минимальному периоду повторения Tmin=min(T1, Т2, …).
Блок 14 задерживания (фиг. 3, 9) осуществляет задержку входных отсчетов в реальном масштабе времени на интервал τ, определяемый из выражения (2) и равный задержке оценок по отношению к среднему элементу обучающей выборки, исключенному в накопителе 40 (фиг. 13, 15) в соответствии с выражением (1). Тогда в случае сигнала, соизмеримого по величине с помехой, или разрывной помехи при последующем режектировании отсчетов помехи с элемента разрешения, содержащего сигнал, исключается возможность ослабления или подавления сигнала за счет его влияния на используемые оценки. При этом ОЗУ 30 служат для "скользящего" хранения τ/tд отсчетов.
Синхронизация адаптивного вычислителя для режектирования помех осуществляется подачей на все блоки вычислителя последовательности синхронизирующих импульсов, вырабатываемых синхрогенератором 8 (фиг. 1), управляемым импульсами синхронизатора радиолокатора (на фиг. 1 не показан), следующими поочередно с интервалами T1, T2, … . Период повторения синхронизирующих импульсов равен интервалу временной дискретизации tд, выбираемому из условия требуемой разрешающей способности по дальности.
Достоинством заявляемого технического решения является, во-первых, возможность адаптироваться к аргументу и модулю реальной корреляционной функции помехи, не прибегая к аппроксимации ее формы, с учетом вобуляции периода повторения зондирующих импульсов и, во-вторых, малая длительность процесса адаптации, завершающегося в пределах переходного процесса в адаптивном вычислителе для режектирования помех.
На фиг. 18 изображены зависимости выигрыша Δµ в усредненном по доплеровской фазе сигнала коэффициенте улучшения отношения сигнал/помеха предложенного вычислителя по сравнению с прототипом от глубины вобуляции mod (в процентах) для двух значений нормированной ширины спектра помехи β=ΔfTmin (β=0,05 - кривая 1 и β=0,1 - кривая 2). Кривые построены для случая двукратной вобуляции периода повторения (р=2) и объема обучающей выборки n=5.
Таким образом, адаптивный вычислитель для режектирования помех повышает эффективность режектирования пассивной помехи и выделения сигналов движущихся целей при вобуляции периода повторения на фоне пассивных помех с априорно неизвестными спектрально-корреляционными свойствами.
На фиг. 2 представлен частный вариант выполнения адаптивного вычислителя для режектирования помех. В него введены третий блок 12 задержки и дополнительный сумматор 13. Известно, что эти блоки самостоятельно используются для подавления пассивных помех. Дополнительное включение данных блоков позволяет повысить эффективность режектирования пассивной помехи, уменьшить длину разрядной сетки цифровых арифметических устройств (умножителей, делителей и сумматоров) в последующих блоках адаптивного вычислителя, не снижая при этом требований по точности вычислений, или при той же длине разрядной сетки повысить точность вычислении.
Библиография
1. А.с. 809018 СССР, МПК G01S 7/36. Цифровое устройство для подавления пассивных помех / Д.И. Попов. - №2755228; заявл. 16.04.1979; опубл. 28.02.1981, Бюл. №8. - 5 с.
2. Радиоэлектронные системы: основы построения и теория. Справочник / Я.Д. Ширман, С.Т. Багдасарян, А.С. Маляренко, Д.И. Леховицкий [и др.]; под ред Я.Д. Ширмана. - 2-е изд., перераб. и доп. - М.: Радиотехника, 2007; с. 439, рис. 25.22.
3. А.с. 1098399 СССР, МПК G01S 7/36. Устройство адаптивной режекции пассивных помех / Д.И. Попов. - №3299959; заявл. 12.06.1981; опубл. 20.12.1998, Бюл. №35. - 16 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТИВНЫЙ РЕЖЕКТОР ПАССИВНЫХ ПОМЕХ | 2015 |
|
RU2599621C1 |
| ВЫЧИСЛИТЕЛЬ ДЛЯ АДАПТИВНОГО РЕЖЕКТИРОВАНИЯ ПОМЕХ | 2015 |
|
RU2582871C1 |
| АДАПТИВНЫЙ РЕЖЕКТОРНЫЙ ФИЛЬТР | 2015 |
|
RU2579998C1 |
| ВЫЧИСЛИТЕЛЬ ДЛЯ РЕЖЕКТИРОВАНИЯ ПОМЕХ | 2017 |
|
RU2680202C1 |
| РЕЖЕКТОРНЫЙ ФИЛЬТР | 2021 |
|
RU2759150C1 |
| ФИЛЬТР РЕЖЕКТИРОВАНИЯ ПОМЕХ | 2017 |
|
RU2674468C1 |
| АДАПТИВНЫЙ РЕЖЕКТОРНЫЙ ФИЛЬТР | 2017 |
|
RU2660645C1 |
| ВЫЧИСЛИТЕЛЬ ДЛЯ РЕЖЕКТОРНОЙ ФИЛЬТРАЦИИ ПОМЕХ | 2017 |
|
RU2686633C1 |
| ВЫЧИСЛИТЕЛЬ ДЛЯ КОМПЕНСАЦИИ ПОМЕХ | 2017 |
|
RU2679974C1 |
| ВЫЧИСЛИТЕЛЬ ДЛЯ РЕЖЕКТОРНОЙ ФИЛЬТРАЦИИ ПОМЕХ | 2017 |
|
RU2686634C1 |
Изобретение относится к вычислительной технике и может быть использовано в автоматизированных когерентно-импульсных системах для выделения сигналов движущихся целей на фоне пассивных помех. Достигаемый технический результат - осуществление режектирования пассивных помех с априорно неизвестными спектрально-корреляционными свойствами при выделении сигналов движущихся целей. Адаптивный вычислитель для режектирования помех содержит автокомпенсатор, первый и второй блоки задержки, основной и дополнительный блоки измерения коэффициента корреляции, блок вычисления весовых коэффициентов, основной и дополнительный весовые блоки, основной сумматор, синхрогенератор, цифровую линию задержки. 1 з.п. ф-лы, 18 ил.
1. Адаптивный вычислитель для режектирования помех, содержащий автокомпенсатор, первый и второй блоки задержки, основной блок измерения коэффициента корреляции, блок вычисления весовых коэффициентов, основной весовой блок, основной сумматор и синхрогенератор, при этом выходы автокомпенсатора соединены с одноименными входами первого блока задержки, первыми входами основного блока измерения коэффициента корреляции и первыми входами основного сумматора, выходы первого блока задержки соединены с одноименными входами второго блока задержки, вторыми входами основного блока измерения коэффициента корреляции и первыми входами основного весового блока, выходы которого соединены с одноименными вторыми входами основного сумматора, выход основного блока измерения коэффициента корреляции соединен с первым входом блока вычисления весовых коэффициентов, первый выход которого соединен со вторым входом основного весового блока, выход синхрогенератора соединен с синхровходами автокомпенсатора, первого и второго блоков задержки, основного блока измерения коэффициента корреляции, блока вычисления весовых коэффициентов, основного весового блока и основного сумматора, отличающийся тем, что введены дополнительный блок измерения коэффициента корреляции, цифровая линия задержки и дополнительный весовой блок, при этом первые входы дополнительного блока измерения коэффициента корреляции соединены с одноименными первыми входами основного блока измерения коэффициента корреляции, вторые входы дополнительного блока измерения коэффициента корреляции соединены с одноименными выходами второго блока задержки и первыми входами дополнительного весового блока, выходы которого соединены с одноименными третьими входами основного сумматора, вход цифровой линии задержки соединен с выходом основного блока измерения коэффициента корреляции, выход цифровой линии задержки соединен со вторым входом блока вычисления весовых коэффициентов, третий вход которого соединен с выходом дополнительного блока измерения коэффициента корреляции, а второй выход - со вторым входом дополнительного весового блока, выход синхрогенератора соединен с синхровходами дополнительного блока измерения коэффициента корреляции, цифровой линии задержки и дополнительного весового блока, причем входами адаптивного вычислителя для режектирования помех являются входы автокомпенсатора, а выходами - выходы основного сумматора.
2. Адаптивный вычислитель для режектирования помех по п. 1, отличающийся тем, что в него введены третий блок задержки и дополнительный сумматор, при этом входы третьего блока задержки соединены с одноименными выходами автокомпенсатора и первыми входами дополнительного сумматора, вторые входы которого соединены с одноименными выходами третьего блока задержки, а выходы - с одноименными входами первого блока задержки, первыми входами основного блока измерения коэффициента корреляции, первыми входами дополнительного блока измерения коэффициента корреляции и первыми входами основного сумматора, выход синхрогенератора соединен с синхровходами третьего блока задержки и дополнительного сумматора.
| ДОПЛЕРОВСКИЙ ФАЗОМЕТР ПАССИВНЫХ ПОМЕХ | 2014 |
|
RU2550315C1 |
| УСТРОЙСТВО ДЛЯ АДАПТИВНОГО ПОДАВЛЕНИЯ ПОМЕХ | 1990 |
|
SU1802616A1 |
| RU 2064190 C1, 20.07.1996 | |||
| СПОСОБ ПОДАВЛЕНИЯ ПОМЕХ | 2009 |
|
RU2413237C1 |
| WO 2009006078 A2, 08.01.2009. | |||

