Нижеприведенное изобретение относится к медицинским технологиям, технологиям магнитного резонанса, технологиям диагностической визуализации и смежным технологиям. Настоящее изобретение находит применение в магнитно-резонансной визуализации, спектроскопии и других областях применения магнитной аппаратуры, в которых создают сильное магнитное поле и т.п.
В традиционной магнитно-резонансной визуализации (МРВ) и спектроскопии (МРС) применяют сильные магнитные поля для ориентирования диполей в области обследования в исследуемом объекте или пациенте. Помещения, которые вмещают магниты МРВ, часто экранируют, чтобы предотвратить создание помех для других устройств сильными магнитными и радиочастотными (РЧ) полями и создание помех для магнитно-резонансных (МР) систем посторонними РЧ полями. Одно потенциально опасное косвенное действие сильных магнитных полей состоит в физическом притяжении, действующем на находящийся поблизости ферромагнитный материал. Железные объекты или объекты с железными компонентами следует держать на безопасном расстоянии от магнита, когда магнит создает поле, обычно за линией 5 Гаусс (0,0005 Т). Даже если магнитное притяжение является недостаточно сильным для физического смещения устройства в целом, то магнитное поле еще прилагает силы и крутящие моменты, которые влияют на работу устройства. Другое нежелательное косвенное действие состоит в том, что магнитное поле может повреждать магнитно-чувствительные приборы и вызывать их выход из строя или неправильное функционирование. Даже на расстояниях, на которых физическое смещение объекта не является большой опасностью, магнитные поля могут еще влиять на чувствительные компоненты. Упомянутые повреждения могут быть временными, и после удаления из поля устройство может работать нормально. Однако возможно причинение перманентного повреждения, например, де- или реполяризация постоянных магнитов, деформация и т.п. Магнитные силы, действующие на подвижные электромагнитные или железные части, могут создавать добавочную нагрузку устройства, приводящую к преждевременному повреждению.
Например, регистрирующее устройство содержит приводной валик для ленты бумаги, который часто приводится в движение либо электродвигателем постоянного тока, либо шаговым двигателем с магнитным полем, ни один из которых фактически не работает в магнитном поле магнитно-резонансной системы. Регистрирующее устройство может просто не работать в магнитном поле. В альтернативном варианте, двигатель с магнитным полем может терять намагниченность, реполяризоваться, снижать скорость работы или даже двигаться в обратном направлении, особенно при приближении к основному магниту МР системы, в которой напряженность магнитного поля является высокой, например, внутри линии пять Гаусс. Иногда полезно, чтобы регистрирующее устройство записывало физиологические данные вблизи пациента, проходящего МР исследование. Например, регистрирующее устройство может быть встроено в ЭКГ монитор, монитор кровяного давления или подобный прибор. Когда регистрирующее устройство приближают к пациенту, проходящему МР исследование, регистрирующее устройство, подобно пациенту, подвергается действию, по существу, полного поля.
Ниже предлагаются новые и усовершенствованные устройства и способы, которые преодолевают вышеописанные и другие проблемы.
В соответствии с одним аспектом предлагается регистрирующее устройство для регистрации физиологических данных от пациента, расположенного в сильном магнитном поле. Регистрирующее устройство включает в себя узел печатающей головки, который печатает физиологические данные от пациента, расположенного в сильном поле. Пьезоэлектрический двигатель подает бумагу через печатающий узел, когда печатаются физиологические данные от пациента, расположенного в сильном магнитном поле.
В соответствии с другим аспектом предлагается способ создания распечатки физиологических данных от пациента, расположенного в сильном магнитном поле. Контролируют физиологические данные от пациента в сильном магнитном поле. Управляют пьезоэлектрическим двигателем для подачи бумаги вдоль печатающей головки, которая печатает контролируемые физиологические данные на бумаге.
Одно из преимуществ состоит в приводе регистрирующего устройства в действие в присутствии сильного магнитного поля.
Другое преимущество состоит в печатании информации о пациенте в непосредственной близости от МР системы.
Другое преимущество состоит в регистрации физиологических данных в окружающей среде МР исследования, без введения проблематичных токопроводящих каналов или контуров от длинных соединений.
Дополнительные преимущества настоящего изобретения будут очевидными специалистам со средним уровнем компетентности в данной области техники после прочтения и понимания нижеследующего подробного описания.
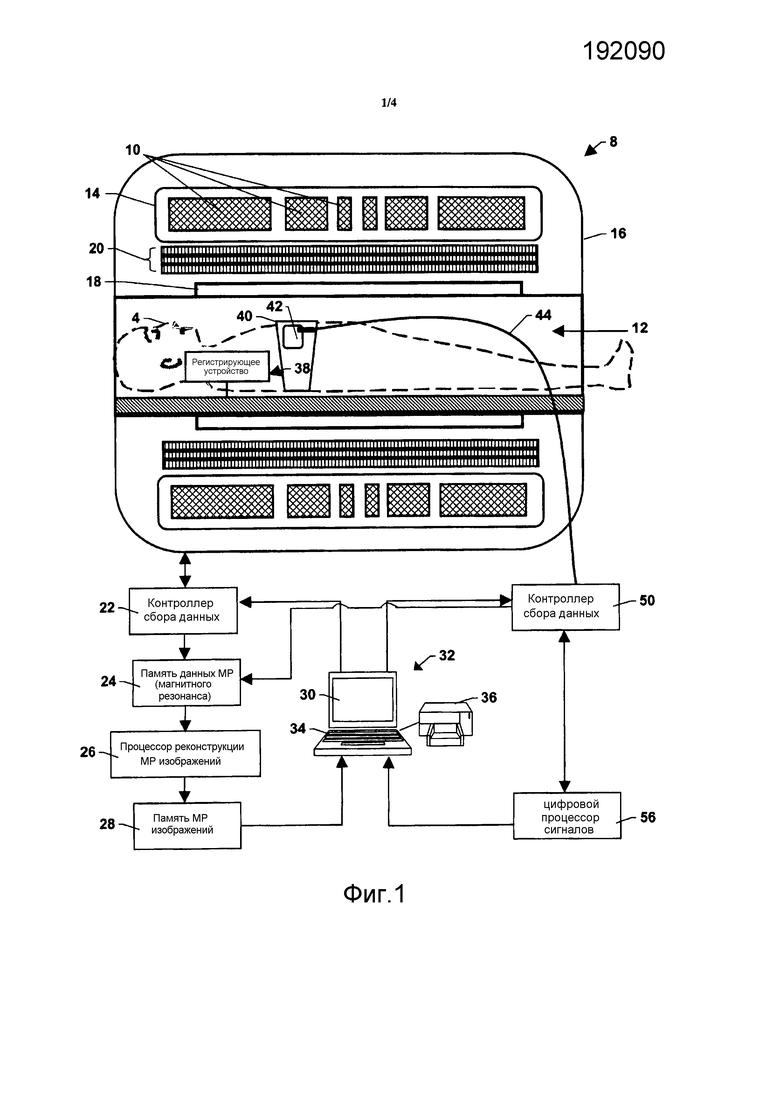
Фигура 1 - схематичное представление комплексной системы сбора данных магнитного резонанса.
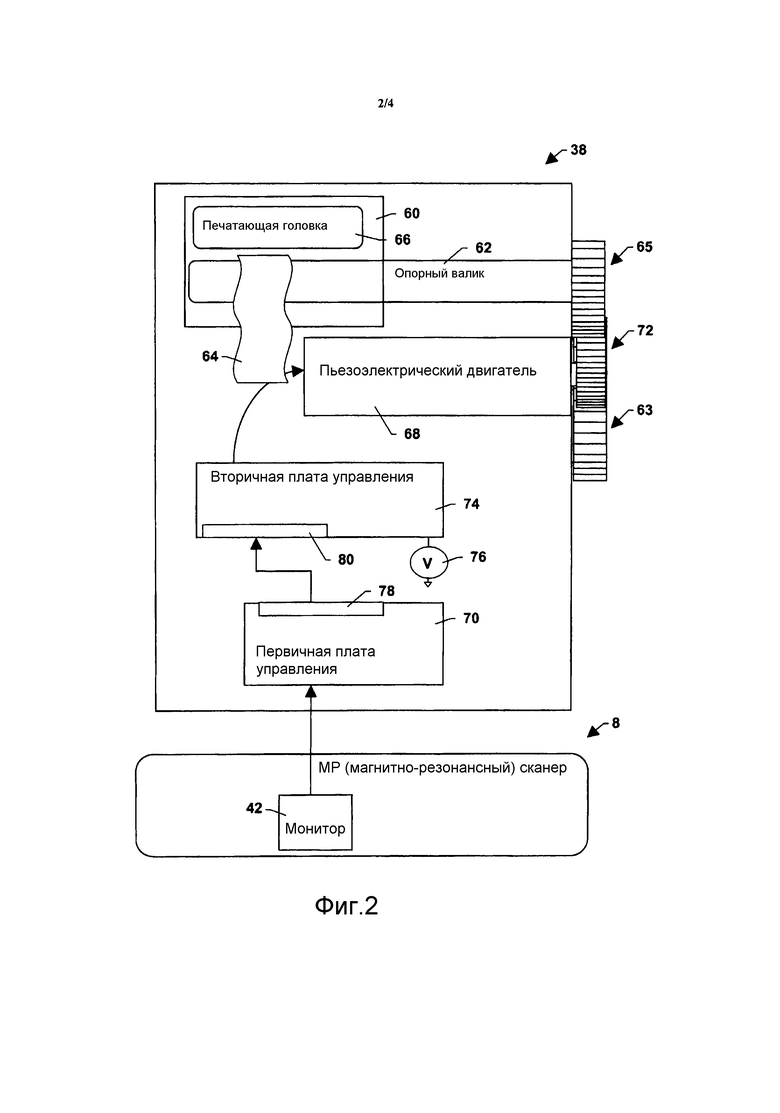
Фигура 2 - схематичное представление регистрирующего устройства для применения в системе, показанной на фигуре 1.
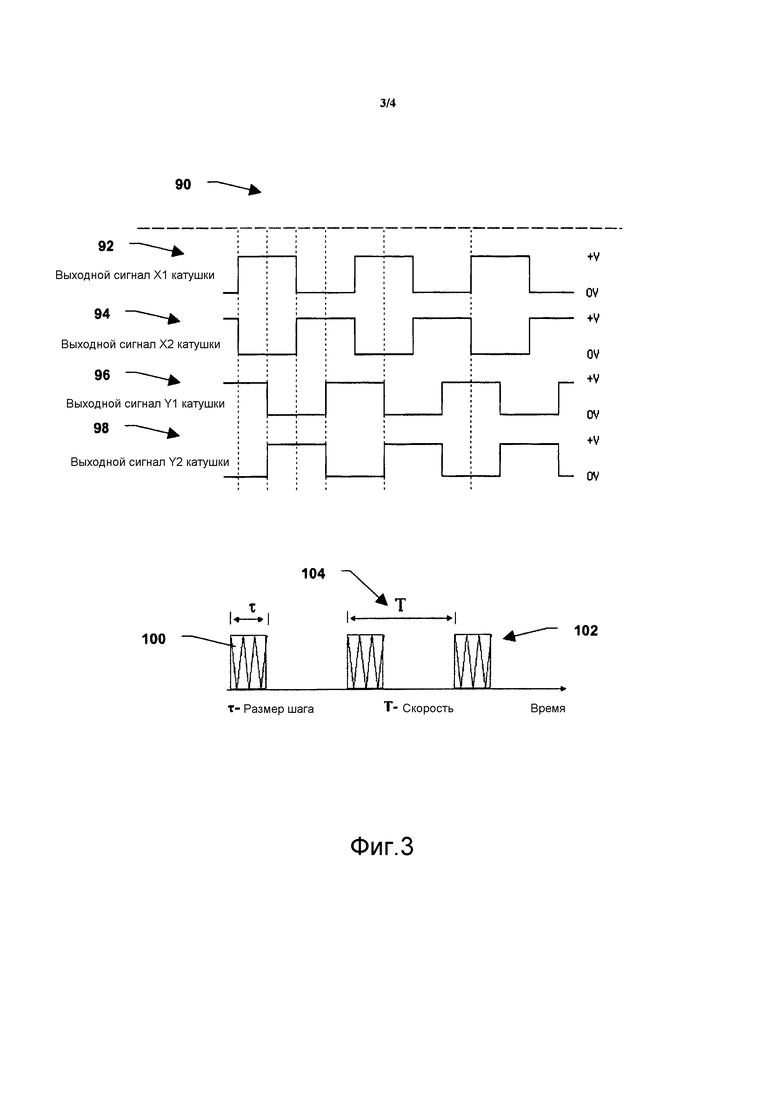
Фигура 3 - схематичное представление сигналов управления питанием, предназначенных для привода регистрирующего устройства, показанного на фигуре 2.
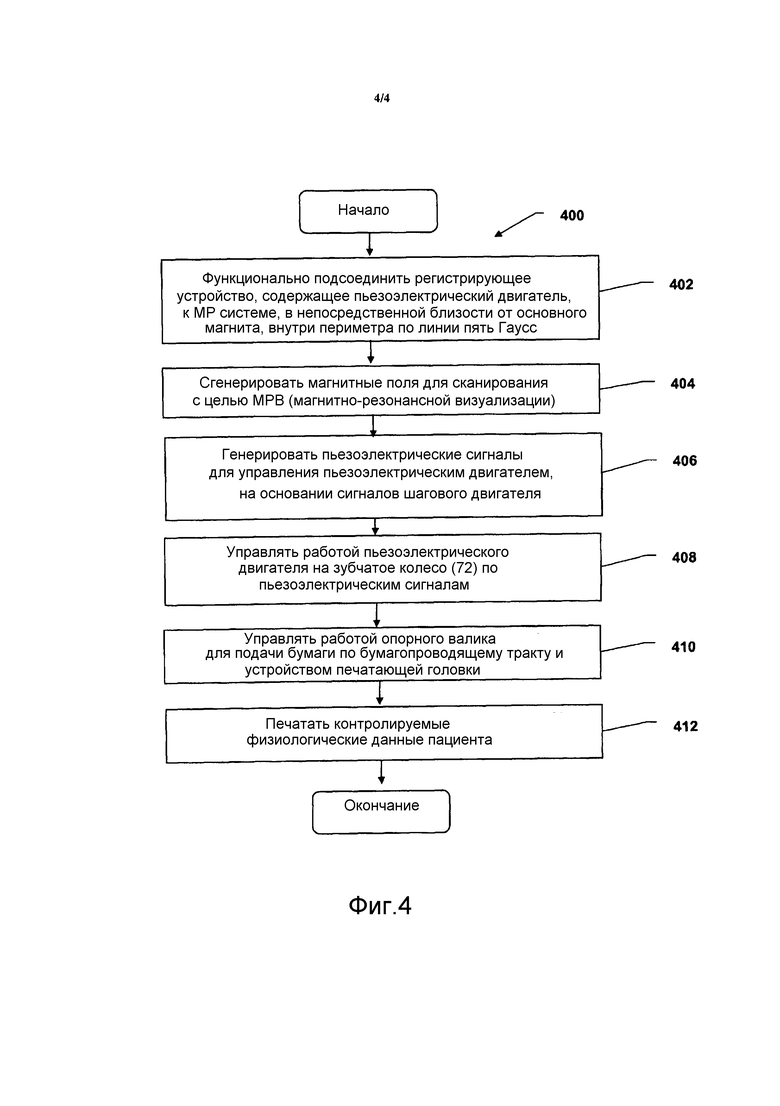
Фигура 4 - представление способа управления регистрирующим устройством для регистрации информации о пациенте для пациента в окружающей среде МР исследования.
Как показано на фигуре 1, магнитно-резонансная (МР) система включает в себя МР сканер 8, содержащий основной магнит 10, который генерирует статическое во времени основное (B0) магнитное поле в области 12 исследования. В представленном варианте осуществления, основной магнит 10 является сверхпроводящим магнитом, расположенным в криогенном резервуаре 14, использующем гелий или другую криогенную жидкость; в альтернативном варианте можно использовать резистивный основной магнит. В представленном варианте осуществления, магнитный узел 10, 14 размещен внутри в общем цилиндрического корпуса 16 сканера, ограничивающего область 12 исследования в туннеле, например, цилиндрическом туннеле; в альтернативном варианте можно также применить другие геометрии, например, открытую геометрию МР системы. Магнитный резонанс возбуждают и регистрируют, по меньшей мере, одной радиочастотной катушкой, например, изображенной квадратурной катушкой 18 для тела, обеспечивающей визуализацию всего тела, или, по меньшей мере, одной локальной катушкой или комплектами катушек, например, катушкой для головы или катушкой для груди. Возбужденный магнитный резонанс пространственно кодируется, сдвигается по фазе и/или частоте или подвергается иным воздействиям посредством градиентов магнитного поля, селективно генерируемых набором катушек 20 для формирования градиентов магнитного поля.
Магнитно-резонансный сканер 8 работает под управлением контроллера 22 сбора данных магнитного резонанса, соответственно осуществленного с помощью специализированного цифрового устройства для обработки данных соответственно запрограммированного универсального компьютера и так далее, с возможностью генерировать, пространственно кодировать и считывать данные магнитного резонанса, например, проекции или отсчеты в k-пространстве, которые сохраняются в памяти 24 данных магнитного резонанса. Собранные пространственно кодированные данные магнитного резонанса реконструируются процессором 26 реконструкции магнитно-резонансных изображений, чтобы сформировать, по меньшей мере, одно изображение исследуемого пациента 4, расположенного в области 12 исследования. Реконструирующий процессор 26 использует алгоритм реконструкции, соответствующий пространственному кодированию, например, алгоритм на основе обратных проекций для реконструкции собранных данных проекций или алгоритм на основе преобразования Фурье для реконструкции отсчетов k-пространства.
Система 32 компьютерного интерфейса включает в себя также, по меньшей мере, одно пользовательское устройство ввода, например, показанную клавиатуру 34, или мышь, или указательное устройство ввода, и так далее, которое дает возможность радиологу, кардиологу или другому пользователю воздействовать на изображения и, в показанном варианте осуществления, взаимодействовать с контроллером 22 магнитно-резонансного сканера. По меньшей мере, одно реконструированное изображение сохраняется в памяти 28 магнитно-резонансных изображений и соответственно отображается на дисплее 30 системы 32 компьютерного интерфейса или распечатывается с использованием принтера или другого механизма 36 маркировки; в альтернативном варианте, изображения могут быть переданы по сети Интернет, или цифровой внутрибольничной сети, или сохранены на магнитном диске, или в другом архивном запоминающем устройстве, или использованы иначе.
Как также показано на фигуре 1, МР система 8 включает в себя устройство 42 физиологического монитора, которое может включать в себя различные датчики, которые функционально подсоединены к пациенту 4. Диагностическое считывающее устройство 42 может быть включено в состав респираторного датчика, инвазивного или неинвазивного датчика кровяного давления, ЭКГ, датчика SPO2 или любого другого медицинского устройства, выполняющего функцию считывания различных по типу физиологических данных от пациента в области 12 физиологического исследования МР системы 8. В одном варианте осуществления, физиологический монитор 42 включает в себя манжету или пояс 40, которая(ый) охватывает конечность или торс пациента, например, для считывания изменений кровяного давления. Физиологический монитор может также включать в себя электроды для ЭКГ, другой сердечный монитор и т.п. Настоящее изобретение не ограничено каким-то конкретным медицинским устройством. Физиологический монитор 42 определяет раздражители вблизи или внутри области 12 исследования. Физиологический монитор содержит или передает физиологические данные в регистрирующее устройство 38. По желанию, монитор 42 передает физиологические данные беспроводным методом, по стандарту Bluetooth, по волоконно-оптическому или электрическому проводному кабелю 44, или подобным образом в контроллер 50 сбора данных. Цифровой процессор 46 сигналов форматирует физиологические данные для отображения на мониторе 30, для сохранения в базе данных пациента и т.п.
Данные, считанные с пациента, посылаются в регистрирующее устройство 38, расположенное вблизи основного магнита 10 в магнитном поле. Регистрирующее устройство печатает, например, на регистрирующей бумажной ленте, запись считанных физиологических данных. Регистрирующее устройство 38 расположено и работает в поле с полной напряженностью, например, 1,5 T, 3 T и т.п. Манжета 40 может включать в себя электроды или другие считывающие компоненты, выполненные из материалов, обладающих низкой магнитной восприимчивостью, и/или может включать в себя компоненты небольшого размера (например, электроды) с повышенной магнитной восприимчивостью, чтобы не мешать или минимизировать помехи сбору данных магнитного резонанса.
Как также показано на фигуре 1 и дополнительно показано на фигуре 2, наглядный вариант осуществления регистрирующего устройства 38 пригоден для работы в сильных магнитных полях, генерируемых основным магнитом МР сканера 8, в которых затруднена работа электродвигателей с постоянными магнитами.
Регистрирующее устройство 38 включает в себя печатающий узел 60, содержащий печатающую головку 66 и опорный валик 62, который функционально предназначен для регистрации информации о пациенте, например, на бумаге 64, подаваемой вдоль бумагопроводящего тракта между упомянутыми головкой и валиком. В одном варианте осуществления, печатающая головка 66 включает в себя термопечатающую головку для печати на бумаге 64. Регистрирующее устройство 38 включает в себя пьезоэлектрический двигатель 68, который приводит в движение опорный валик 62 посредством зубчатого колеса 65 опорного валика, для подачи бумаги 64 вдоль печатающей головки. Пьезоэлектрический двигатель 68 является электродвигателем, действующим на основе пьезоэлектрического эффекта, например, изменения формы пьезоэлектрического материала, когда прикладывается электрическое поле. Материал производит механические, акустические или ультразвуковые вибрации, например, чтобы создавать линейное или вращательное движение, в зависимости от типа пьезоэлектрического двигателя. Вращательный пьезоэлектрический двигатель обеспечивает вращательное движение для вращения зубчатого колеса 72 пьезоэлектрического двигателя. Линейный пьезоэлектрический двигатель использует механическое устройство сопряжения для преобразования линейного движения во вращательное движение.
В одном варианте осуществления, первичная плата 70 управления генерирует импульсы электромагнитного шагового двигателя для привода традиционного электромеханического шагового двигателя. Первичная плата 70 управления включает в себя тактовый генератор или сопряжена с ним для генерации импульсов с выбранной частотой, чтобы подавать бумагу 64 с выбранной скоростью. Первичная схемная плата включает в себя интерфейс 78, который посылает импульсы во вторичную плату 74 управления.
Вторичная плата 74 управления преобразует принятые импульсы в сигналы управления, пригодные для приведения в движение пьезоэлектрического двигателя 68 таким образом, чтобы имитировать электромеханический шаговый двигатель предшествующего уровня техники для привода бумаги с той же самой выбранной скоростью и на основе сигналов, принятых первичной платой 70 управления. Сигналы управления пьезоэлектрическим двигателем включают в себя импульсы с предварительно заданной величиной, например, ширины и амплитуды импульса, и частотой для управления пьезоэлектрическим двигателем 68 со скоростями вращения, аналогичными скоростям вращения электромагнитного шагового двигателя. Например, при подаче частоты возбуждения в виде импульсов с известной продолжительностью и частотой следования, пьезоэлектрический двигатель 68 оказывается выполненным с возможностью имитации работы электромагнитного шагового двигателя. Электромагнитный шаговый двигатель, например, работает пошагово, при этом зубчатое колесо с пилообразными зубьями поворачивается на угол, приблизительно, 7,5 градусов за один шаг. Пьезоэлектрический шаговый двигатель перемещается шагами меньшего размера и использует приблизительно 27000 импульсов пьезоэлектрического возбуждения для создания вращательного движения на угол 7,5 градусов, т.е. разрешающая способность пьезоэлектрического двигателя составляет приблизительно 1 угловую секунду на один импульс. Преобразование импульсов электромагнитного шагового двигателя, генерируемых первичной платой 70 управления, в более высокочастотные импульсы управления для пьезоэлектрического двигателя выполняется вторичной платой 74 управления.
Печатающий узел дополнительно включает в себя неприводное колесо 63, сконфигурированное с возможностью передачи движения от зубчатого колеса 72 пьезоэлектрического двигателя, приводимого в движение пьезоэлектрическим двигателем, на опорный валик. Поскольку пьезоэлектрический двигатель 68 работает под более высоким напряжением, чем электромеханический шаговый двигатель, то обеспечен источник 76 питания. Источник питания может быть внешним источником питания или внутренним по отношению к вторичной плате 74 управления для приведения в движение пьезоэлектрического двигателя 68.
На фигуре 3 показаны выходные сигналы 102 из первичной платы 70 управления и вторичной платы 74 управления, показанных на фигуре 2. Сигналы 90 для электромеханического шагового двигателя показывают характер работы шагового двигателя, который имитируется пьезоэлектрическим двигателем в настоящем изобретении. Полифазный синхронный электромеханический двигатель переменного тока идеально приводится в движение синусоидальным током. Форма сигнала с полным шагом, в течение которого вращается зубчатое колесо шагового двигателя, является грубым приближением синусоиды. Разработаны различные методы приведения в движение для более точного приближения синусоидальной формы сигнала приведения в движение, например, полушаговый и микрошаговый, которые могут быть понятны специалисту со средним уровнем компетентности в данной области техники.
Например, электромеханический шаговый двигатель обычно содержит несколько «зубчатых» электромагнитов, расположенных вокруг зубчатого колеса шагового двигателя, например, четыре электромагнита, расположенных с противоположных сторон зубчатого колеса. Электромагниты (не показанные) получают питание из схемы первичной платы 70 управления и приводятся в действие в соответствии сигналами 90 электромеханического шагового двигателя. Чтобы вызвать вращение вала двигателя, питание в первый электромагнит вдоль оси подают в форме выходных сигналов 92 управления питанием, что вызывает магнитное притяжение зубьев зубчатого колеса к зубьям электромагнита. Когда зубья зубчатого колеса совмещаются, таким образом, с первым электромагнитом, упомянутые зубья немного смещены от следующего электромагнита, и, следовательно, когда выходными сигналами 94 управления питанием включается следующий набор электромагнитов, то первый набор выключается, зубчатое колесо немного поворачивается до совмещения со следующим набором, и с данного момента процесс повторяется по сигналам 96 и 98 управления питанием. Каждый из упомянутых небольших поворотов называется «шагом», при этом целое число шагов составляет полный оборот. Таким образом, двигатель можно повернуть на точный угол, который обычно составляет приблизительно 7,5 градусов.
Пьезоэлектрические двигатели обычно приводятся в движение двумя ортогональными видами колебаний с разностью фаз около 90°. Точка контакта между двумя поверхностями колеблется по эллиптической траектории, что создает силу трения между поверхностями. Обычно одна поверхность зафиксирована, что вызывает движение другой поверхности. Например, во многих пьезоэлектрических двигателях пьезоэлектрический кристалл возбуждают сигналом 100 пьезоэлектрического возбуждения с резонансной частотой или частотой возбуждения пьезоэлектрического двигателя. Сигнал 100 обеспечивают в виде импульсов 102 более высокочастотных пьезоэлектрических сигналов с известными продолжительностью τ и частотой 104 следования для имитации характерного режима электромагнитного шагового двигателя и привода зубчатого колеса 72. Таким образом, опорный валик 62 регистрирующего устройства поворачивается для печати информации о пациенте в МР системе. Например, для вызова движения шагового двигателя на 7,5 градусов генерируется приблизительно 27000 импульсов возбуждения.
Один вариант осуществления способа 400 для формирования распечатки данных, соответствующих информации о пациенте, полученной в течение сканирования с целью магнитно-резонансной визуализации (МРВ) с помощью магнитно-резонансной (МР) системы, содержащей основной магнит и регистрирующее устройство, представлен на фигуре 4. Хотя способ 400 показан и поясняется ниже в виде последовательности операций или событий, следует понимать, что представленный порядок упомянутых операций или событий не подлежит интерпретации в смысле ограничения. Например, некоторые операции могут выполняться в других порядках и/или параллельно с другими операциями или событиями, кроме показанных и/или описанных в настоящей заявке. Кроме того, не все показанные операции могут требоваться для реализации, по меньшей мере, одного аспекта или варианта осуществления, изложенных в настоящем описании. Кроме того, по меньшей мере, одна из операций, приведенных в настоящем описании, может выполняться в виде, по меньшей мере, одной отдельной операции и/или отдельного этапа.
Способ 400 начинается сначала, и, на этапе 402, регистрирующее устройство 38 функционально подсоединяют к пациенту, расположенному в непосредственной близости от основного магнита МР системы. Во время МР исследования регистрирующее устройство обычно находится внутри периметра по линии пять Гаусс МР системы и обычно под действием полного поля. Магнитные и РЧ поля генерируются для сканирования с целью МРВ на этапе 404, чтобы, например, сгенерировать данные магнитного резонанса для пациента в физиологической области.
На этапе 406, вторичной платой 74 управления генерируются более высокочастотные пьезоэлектрические сигналы на основе сигналов шагового двигателя из первичной платы 70 управления регистрирующего устройства 38. Пьезоэлектрические сигналы управляют пьезоэлектрическим двигателем 68 с аналогичными механизмами для вращения зубчатого колеса 72 шагового двигателя на этапе 408. Например, пьезоэлектрические сигналы генерируются вторичной платой 74 управления, преобразующей сигналы 90 электромеханического шагового двигателя из первичной платы управления в пьезоэлектрические сигналы 100. Число генерируемых сигналов пьезоэлектрического двигателя должно обеспечивать имитацию соответствующих операций электромеханического шагового двигателя пьезоэлектрическим двигателем. Пьезоэлектрические сигналы 100 содержат число импульсов 102 соответственно частоте пьезоэлектрического возбуждения, обеспечиваемых в предварительно заданные моменты времени и с предварительно заданными частотами следования, на основании сигналов 90 электромеханического шагового двигателя, чтобы приводить в движение пьезоэлектрический двигатель подобно шаговому двигателю.
Опорный валик 62 поворачивается на этапе 410 посредством сочлененного с ним зубчатого колеса 65, и бумага 64 подается вдоль бумагопроводящего тракта по пьезоэлектрическим сигналам, приводящим в движение пьезоэлектрический двигатель 68. На этапе 412 печатающая головка реагирует на физиологические данные из монитора 42 печатанием отображения контролируемых физиологических данных пациента, например ЭКГ диаграммы, диаграммы кровяного давления, символов, указывающих наступление и окончание событий, периодически считываемых численных данных и т.п.
Выше описание изобретения приведено на примере предпочтительных вариантов осуществления. После прочтения и изучения вышеприведенного подробного описания специалистами могут быть созданы модификации и изменения. Предполагается, что настоящее изобретение следует интерпретировать как включающее в себя все упомянутые модификации и изменение в такой степени, в которой они находятся в пределах объема притязаний прилагаемой формулы изобретения или ее эквивалентов.
| название | год | авторы | номер документа |
|---|---|---|---|
| КРАЕВОЙ СОЕДИНИТЕЛЬ БЕЗ КРЕПЕЖНЫХ ЭЛЕМЕНТОВ ДЛЯ МЕДИЦИНСКОГО КОНТРОЛЯ, СОВМЕСТИМОГО С МАГНИТНО-РЕЗОНАНСНЫМ ОБОРУДОВАНИЕМ | 2009 |
|
RU2501521C2 |
| НЕМАГНИТНАЯ ВЫСОКОВОЛЬТНАЯ СИСТЕМА ЗАРЯДКИ ДЛЯ ИСПОЛЬЗОВАНИЯ В УСТРОЙСТВАХ ДЛЯ СТИМУЛЯЦИИ СЕРДЦА | 2010 |
|
RU2562852C2 |
| ИЗМЕРЕНИЕ ВИБРАЦИЙ МАГНИТНО-РЕЗОНАНСНОГО РЕОЛОГИЧЕСКОГО ПРЕОБРАЗОВАТЕЛЯ С ИСПОЛЬЗОВАНИЕМ НАВИГАЦИОННЫХ УСТРОЙСТВ | 2013 |
|
RU2633417C2 |
| КОЛЕБАТЕЛЬНЫЙ АППЛИКАТОР ДЛЯ МР-РЕОЛОГИИ | 2013 |
|
RU2638094C2 |
| ГОЛОВНЫЕ ТЕЛЕФОНЫ ПАЦИЕНТА С ИНТЕГРИРОВАННОЙ СИСТЕМОЙ ДАТЧИКОВ | 2015 |
|
RU2638613C1 |
| ПАССИВНОЕ ШИММИРОВАНИЕ ПОЛЯ В1 | 2011 |
|
RU2577172C2 |
| БЕСПРОВОДНОЙ МАРКЕР ПЕРСПЕКТИВНОГО ДВИЖЕНИЯ | 2012 |
|
RU2604702C2 |
| МАГНИТНО-РЕЗОНАНСНОСОВМЕСТИМЫЕ ЭЛЕКТРИЧЕСКИЕ УСТРОЙСТВА И КОМПОНЕНТЫ С ВИБРОУСТОЙЧИВЫМ РАДИОЧАСТОТНЫМ ЭКРАНОМ ИЛИ КОРПУСОМ | 2010 |
|
RU2555380C2 |
| ГИБРИДНЫЕ СИСТЕМЫ ПОЛУЧЕНИЯ ИЗОБРАЖЕНИЙ МЕТОДАМИ ПОЗИТРОННО-ЭМИССИОННОЙ/МАГНИТНО-РЕЗОНАНСНОЙ ТОМОГРАФИИ | 2007 |
|
RU2444744C2 |
| СИСТЕМА МАГНИТНО-РЕЗОНАНСНЫХ ИССЛЕДОВАНИЙ, ИМЕЮЩАЯ ПОЛЬЗОВАТЕЛЬСКИЙ ИНТЕРФЕЙС | 2016 |
|
RU2735676C2 |
Изобретение относится к медицинской технике, а именно к магнитно-резонансной визуализации. Печатающее устройство содержит печатающий узел, пьезоэлектрический двигатель, выполненный с возможностью подачи бумаги через печатающий узел, первичную и вторичную плату управления, соединенные друг с другом и пьезоэлектрическим двигателем. Система магнитно-резонансной визуализации содержит основной магнит, градиентные катушки, радиочастотные катушки, контроллер и печатающее устройство. Способ создания распечатки информации в магнитном поле заключается в контроле физиологических данных от пациента в сильном магнитном поле, управлении пьезоэлектрическим двигателем, печатью контролируемых физиологических данных на бумаге, генерации сигналов управления механическим шаговым двигателем и генерации сигналов пьезоэлектрического возбуждения. Способ управления системой магнитно-резонансной визуализации заключается в генерации статического магнитного поля, накладывании градиентных магнитных полей, возбуждении радиочастотных полей, сборе информации и выполнении распечатки информации в сильном магнитном поле. Использование изобретения позволяет распечатывать информацию в непосредственной близости от магнитно-резонансной системы без введения токопроводящих каналов или контуров от длинных соединений. 4 н. и 10 з.п. ф-лы, 4 ил.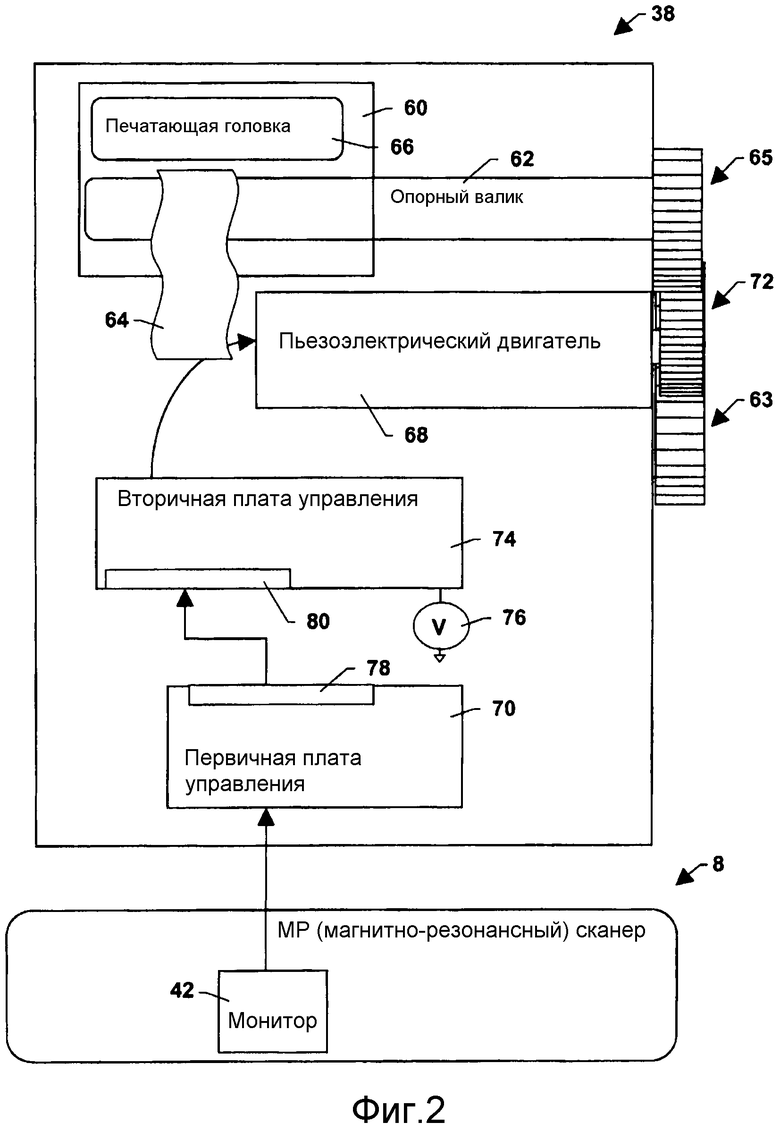
1. Печатающее устройство (38) для распечатки информации в сильном магнитном поле, генерируемом системой магнитно-резонансной визуализации, при этом печатающее устройство содержит:
печатающий узел (60), который печатает физиологические данные от пациента, расположенного в магнитном поле;
пьезоэлектрический двигатель (68), расположенный в магнитном поле, выполненный с возможностью подачи бумаги (64) через печатающий узел (60), когда распечатывают физиологические данные от пациента в магнитном поле;
первичную плату (70) управления, которая выполнена с возможностью генерации сигналов (90) управления электромеханическим шаговым двигателем на основании тактовых сигналов;
вторичную плату (74) управления, функционально соединенную с первичной платой (70) управления и пьезоэлектрическим двигателем (68) с возможностью приема сигналов (90) управления шаговым двигателем из первичной платы (70) управления и генерации сигналов (100) пьезоэлектрического возбуждения, которые приводят в движение пьезоэлектрический двигатель (68), причем пьезоэлектрический двигатель имитирует работу электромеханического шагового двигателя.
2. Печатающее устройство (38) по п. 1, в котором печатающий узел (60) включает в себя печатающую головку (66), которая печатает физиологические данные, и опорный валик, который подает
бумагу (64) вдоль печатающей головки, и
пьезоэлектрический двигатель (68) функционально соединен с печатающим узлом (60) с возможностью вращения опорного валика и подачи бумаги (64) вдоль печатающей головки (66).
3. Печатающее устройство (38) по п. 1, в котором сигналы управления электромеханическим шаговым двигателем сконфигурированы с возможностью подачи бумаги с предварительно выбранной скоростью, и вторичная плата (74) управления переконфигурирует сигналы (90) управления электромеханическим шаговым двигателем в сигналы (100) пьезоэлектрического возбуждения, которые приводят в движение пьезоэлектрический двигатель (68), чтобы подавать бумагу (64) с упомянутой предварительно выбранной скоростью.
4. Печатающее устройство (38) по одному из пп. 1 и 2, в котором вторичная плата (74) управления включает в себя источник (76) питания, электрически соединенный с упомянутой платой, который увеличивает амплитуду сигналов (100) пьезоэлектрического возбуждения.
5. Печатающее устройство (38) по любому из пп. 1 и 2, в котором вторичная плата (74) управления выполнена с возможностью приведения в движение пьезоэлектрического двигателя (68) непосредственно, без подсоединения к нему внешнего источника питания.
6. Печатающее устройство (38) по любому из пп. 1 и 2, дополнительно включающее в себя:
монитор (42), функционально соединенный с печатающим узлом (60), который отображает информацию.
7. Печатающее устройство (38) по любому из пп. 1 и 2, в котором печатающий узел (60) включает в себя:
неприводное колесо (63), выполненное с возможностью передачи движения от зубчатого колеса (72), приводимого в движение пьезоэлектрическим двигателем (68), на опорный валик (62), который подает бумагу через печатающий узел (60).
8. Печатающее устройство (38) по любому из пп. 1 и 2, в котором пьезоэлектрический двигатель (68) выполнен с возможностью вращения зубчатого колеса (72), при этом зубчатое колесо (72) механически соединено с опорным валиком (62) через зубчатое колесо (65) опорного валика.
9. Система (8) магнитно-резонансной визуализации, содержащая:
основной магнит (10), который генерирует статическое магнитное поле (В0) в области (12) исследования пациента;
градиентные катушки (20), которые накладывают градиентные магнитные поля на статическое магнитное поле;
радиочастотные катушки (18), которые накладывают радиочастотные поля для возбуждения и воздействия на магнитный резонанс;
контроллер (22), который управляет градиентными и радиочастотными катушками и собирает информацию о резонансе из пациента (4), расположенного в области (12) исследования; и
печатающее устройство (38) по любому из пп. 1 и 2, расположенное в или с прилеганием к области (12) исследования, с возможностью печатания физиологических данных от пациента (4) в области (12) исследования.
10. Способ создания распечатки информации в магнитном поле, генерируемом системой магнитно-резонансной визуализации, содержащий этапы, на которых:
контролируют физиологические данные от пациента (4) в сильном магнитном поле;
управляют пьезоэлектрическим двигателем (68), расположенным в сильном магнитном поле, для подачи бумаги (64) вдоль печатающей головки (66);
печатают посредством печатающей головки контролируемые физиологические данные на бумаге (64);
генерируют сигналы (90) управления механическим шаговым двигателем на основании тактовых сигналов;
генерируют сигналы (100) пьезоэлектрического возбуждения, которые приводят в движение пьезоэлектрический двигатель (68), из сигналов (90) управления механическим шаговым двигателем, причем пьезоэлектрический двигатель имитирует работу механического шагового двигателя.
11. Способ по п. 10, в котором этап генерации сигналов (100) пьезоэлектрического возбуждения содержит этап, на котором генерируют число импульсов с частотой пьезоэлектрического возбуждения, обеспечиваемых в предварительно заданные моменты времени и с предварительно заданными частотами следования, на основании сигналов (90) управления шаговым двигателем.
12. Способ по любому из пп. 10 и 11, дополнительно содержащий этап, на котором:
вращают пьезоэлектрическим двигателем (68) зубчатое колесо (72) шагового двигателя, которое механически соединено с опорным
валиком (62) через зубчатое колесо (65) опорного валика, который подает бумагу (64) вдоль печатающей головки (66), которая печатает контролируемые физиологические данные.
13. Способ по любому из пп. 10 и 11, в котором физиологические данные контролируют и печатают во время MP сканирования пациента (4).
14. Способ управления системой (8) магнитно-резонансной визуализации, содержащий этапы, на которых:
генерируют статические магнитные поля через пациента;
накладывают градиентные магнитные поля на статические магнитные поля;
возбуждают радиочастотные поля в пациенте;
собирают информацию о магнитном резонансе из пациента; и
выполняют способ по любому из пп. 10 и 11 для создания распечатки физиологических данных от пациента.
| WO 2007134146 A2, 22.11.2007 | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Способ крашения тканей | 1922 |
|
SU62A1 |
| Устройство управления перемещением каретки пишущей машинки | 1987 |
|
SU1463505A1 |
| Takeshi Morita "Miniature piezoelectric motors" Sensors and Actuators A: Physical, Volume 103, Issue 3, 15 February 2003, Pages 291-300. | |||

