«
(Л

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство подачи листовой бумаги в пишущей машине | 1987 |
|
SU1459945A1 |
| Привод печатной машины со средствами для регулирования продольного перемещения ленточного материала | 1980 |
|
SU1000293A1 |
| Устройство для очистки внутренней поверхности трубопроводов | 1989 |
|
SU1726074A1 |
| УПРАВЛЯЕМЫЙ ЭЛЕКТРОПРИВОД (ВАРИАНТЫ) | 2006 |
|
RU2307278C1 |
| Лентопротяжный механизм | 1985 |
|
SU1718269A1 |
| МОБИЛЬНАЯ КАРОТАЖНАЯ ЛЕБЕДКА | 2000 |
|
RU2191741C2 |
| Устройство для очистки внутренней поверхности трубопроводов | 1989 |
|
SU1664425A1 |
| ГИБРИДНЫЙ СИЛОВОЙ АГРЕГАТ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2357876C1 |
| ЭЛЕКТРОМОБИЛЬНЫЙ ВАРИАТОР | 1998 |
|
RU2175415C2 |
| Бесступенчатая силовая передача для транспортных средств | 1989 |
|
SU1733279A1 |
Изобретение относится к устройствам управления перемещением каретки пишущей машинки и может быть использовано в пишущих устройствах. Оно позволяет повысить быстродействие печати. Для этого устройство содержит блок электропривода, включающий пьезоэлектрические осцилляторы и роторы электродвигателей, узел передачи механических перемещений каретки, узел регистрации положения каретки, источник питания электропривода и блок управления перемещением каретки, имеющий узел генерации сигналов реверса и узел формирования управляющих сигналов, включающий триггеры управления и ключи. При работе устройства блок электропривода соединяется поочередно с источником питания электропривода через узел формирования управляющих сигналов, на входы которого подаются сигналы управления от узла генерации сигналов реверса. 1 ил.
1
Изобретение относится к устройствам перемещения каретки пишущей машинки и может быть использовано в пишущих устройствах.
Целью изобретения является повыщение быстродействия печати.
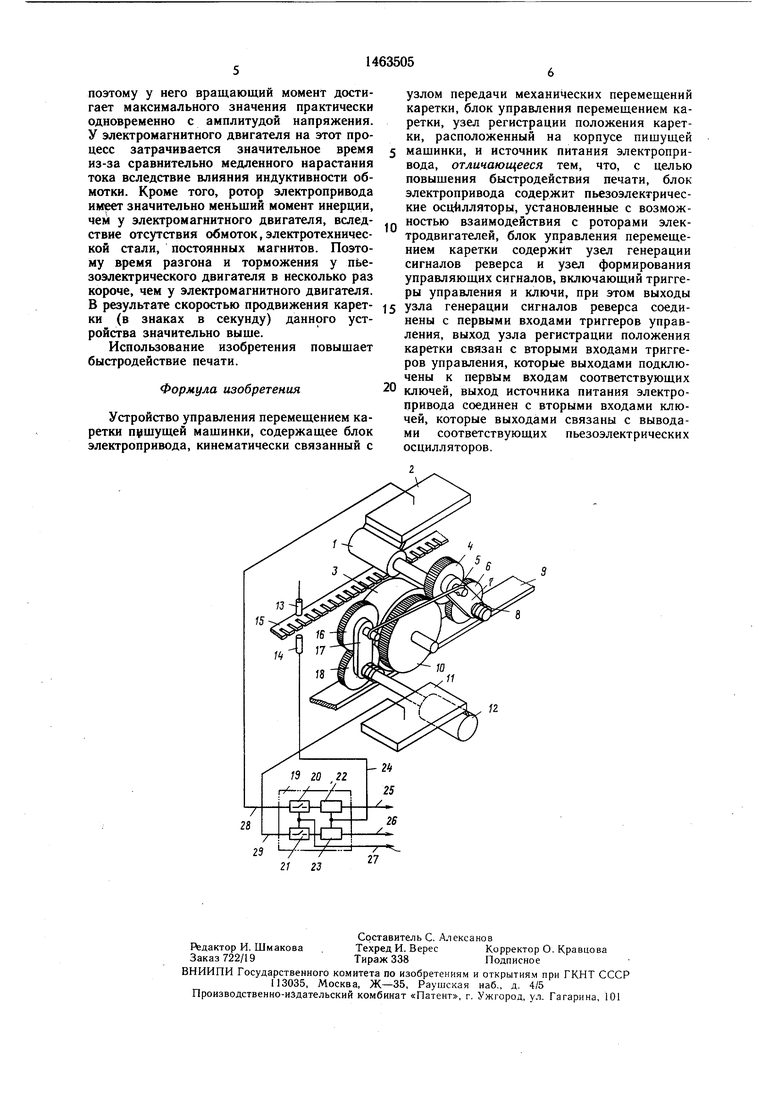
На чертеже представлена блок-схема предлагаемого устройства.
На чертеже показаны ротор 1 электродвигателя, пьезоэлектрический осциллятор 2, барабан 3, зубчатое колесо 4, тяга 5, ведущее зубчатое колесо 6, водило 7, пружины 8, неподвижная опора 9, ведомое зубчатое колесо 10, пьезоэлектрический осциллятор 11, ротор 12 электродвигателя, светоизлучатель 13, фотодиод 14, кодовая линейка 15, зубчатое колесо 16, водило 17, ведущее зубчатое колесо 18, узел 19 формирования управляющих сигналов, содержащий ключи 20, 21 и триггеры 22, 23 управления.
Два выключающих входа каждого триггера соединены вместе и являются выключающим входом 24 узла 19. Другие управляющие входы триггеров управления являются первым 25 и вторым 26 управляющими входами узла 19. Выход каждого триггера соединен с входом соответствующего ключа 20 и 21, силовые входы которых соединены вместе и образуют силовой вход 27 узла 19, соединенный с источником питания электропривода (не показано). Выходы 28 и 29 ключей являются выходами узла 19 и соединены с пьезоэлектрическими осцилляторами 2 и 11.
Узел передачи механических перемещений каретки имеет барабан 3, зубчатые колеса 4 и 16, тягу 5, ведущие зубчатые колеса 6 и 18, водила 7 и 17, пружины 8, неподвижную опору 9 и ведомое зубчатое колесо 10 (узел генерации сигналов реверса (не показан).
При этом барабан 3, являющийся движителем, имеет кинематическую связь с валами электроприводов посредством зубчатого за4
а со ел о сд
цепления, состоящую из зубчатых колес 4 и 16 закрепленных на осях, шарнирно соединенных между собой тягой 5. Зубчатые колеса 4 и 16 являются сателлитами ведущих зубчатых колес 6 и 18, которые закреплены на валах электроприводов. С помощью водил 7 и 17, прижатых пружинами 8 к плоскостям соответствующих ведущих колес 6 и 18, оси сателлитов 4 и 16 могут перемещаться по дугам окружностей
часть устройства - пьезоэлектрические двигатели, зубчатые колеса, датчик положения каретки, установленные на его корпусе. Одновременно влево перемещается печатающая головка, которая закреплена на корпусе подвижной части.
При перемещении каретки в позицию печати щель на кодовой линейке 15 оказывается между светоизлучателем 13 и фото.. „ диодом 14. Световой поток от излучателя 13
вокруг электродвигателей. Барабан 3 опи- Ю через щель попадает на фотодиод 14. На рается на неподвижную опору 9, которая его выходе появляется электрический сигнал, одновременно является направляющей. На поступающий на вход 24 узла 19 и далее валу барабана 3 закреплено ведомое зубча- на включающие входы триггеров 22 и 23 тое колесо 10, входящее в зацепление с управления. Ранее закрытый триггер 23. сателлитом 4 или 16. На корпусе под- 5 изменяет своего состояния, а триггер 22
«перебрасывается, выключая сигнал на выходе. Выходной ключ 20 в результате закрывается, разрывая цепь питания осциллятора 2. Ротор 1 и барабан 3 останавливаются. Устройство находится в исдиодом 14 размещена кодовая линейка 15 20 ходком состоянии. датчика с щелями, являющимися кодовымиПри подаче управляющего сигнала на
I элементами. Кодовая линейка 15 закреплена управляющий вход 26 триггер 23 и ключ 21 I на корпусе печатающего устройства (не по- срабатывают аналогично описанному для : казано) и неподвижна относительно переме- цепи вход 25 - триггер 22 - ключ 20. , I щающейся каретки, закрепленной на корпусе s результате начинает работать второй i подвижной части устройства. Узел 19 сое- пьезоэлектрический двигатель. Его ротор 12 ; тоит из двух ключей 20 и 21 и двух триг- начинает вращаться, приводя во вращение геров 22 и 23 управления, каждый из ведущее зубчатое колесо 18 в направлении которых имеет по два управляющих входа. по часовой стрелке. В результате фрик- Устройство работает следующим образом. ционной связи плоскости колеса 18 с води- В исходном положении оба ключа 20 ЗО лом 17, которая обеспечивается путем прижима водила 17 к колесу 18 пружиной 8, водило 17 увлекается колесом 18 и поворачивается по часовой стрелке вокруг вала ротора 12. При этом ось зубчатого колеса 16 перемещается вправо до тех пор, пока он не
вижной части устройства (не показан) закреплен узел регистрации положения ка- I ретки, содержащий светоизлучатель 13 и фо- I тодиод 14, оптические оси которых совпа- 1 дают. Между светоизлучателем 13 и фотои 21 узла 19 заперты. Цепи питания обоих
электроприводов источник питания - узел : 19 - двигатель разомкнуты. Роторы 1 и 12, и I барабан 3 неподвижны и зафиксированы уси- i лием прижатия осцилляторов 2 и 11 к рото- рам 1 и 12. Зубчатые колеса находятся в 35 войдет в ацепление с ведомым зубчатым
показанном положении.
При появлении электрического сигнала на
управляющем входе 25 триггер 22 «переколесом 10. Одновременно из-за щарнирной связи с помощью тяги 5 ось сателлита 4 также перемещается вправо, выводя из его зацепления с ведомым колесом 10. Сущестэлектрический сигнал, поступающий на вход вовавщее ранее зубчатое зацепление эле- выходного ключа 20. В результате ключ 20 ментов 6-4-10 разрывается и возникает открывается, замыкая цепь питания элек- зацепление ведущее колесо 18 - сател- тропривода (пьезоэлектрического двигателя), лит 16 - ведомое колесо 10. В резуль- при этом напряжение питания от источ- тате вращения ведущего колеса 18 и ука- ника питания электропривода через узел 19 занного зубчатого зацепления ведомое ко- поступает на пьезоэлектрический осциллятор с лесо 10 начинает вращаться по часовой 2, в котором возбуждаются колебания рас- стрелке, а каретка - перемещаться вправо.
При приходе каретки в позицию печати узел регистрации положения каретки выдает сигнал, как описано выще, который поступает на вход 24 узла 19. В результате против часовой стрелки (со стороны вылета 50 аналогично описанному цепь питания пье- вала). Благодаря зацеплению ведущего зуб- зоэлектрического осциллятора 11 разрывается, а продвижение каретки прекращается. Устройство готово к очередному включению и находится во втором исходном положе НИИ, отличающемся от изображенного наливалу барабан 3, который, обкатываясь по чием зубчатого зацепления колес 18-16- неподвижной опоре 9, одновременно яв- Ю-6-4-10,
Данное устройство не содержит элементов электрической инерции (обмоток).
брасывается, на его выходе появляется
тяжения-сжатия. В процессе колебаний осциллятор 2 периодически толкает ротор 1, вследствие чего возникает крутящий мо.мент и ротор начинает вращаться в направлении
чатого колеса 6 через сателлит 4 с ведомым зубчатым колесом 10, последнее также начинает вращаться против часовой стрелки, вращая закрепленный на его
ляющейся направляющей, перемещается вдоль строки, перемещая влево подвижную
поэтому у него вращающий момент достигает максимального значения практически одновременно с амплитудой напряжения. У электромагнитного двигателя на этот процесс затрачивается значительное время из-за сравнительно медленного нарастания тока вследствие влияния индуктивности обмотки. Кроме того, ротор электропривода им зиачительно меньщий момент инерции, чем у электромагнитного двигателя, вследствие отсутствия обмоток, электротехиичес- кой стали, постоянных магнитов. Поэтому время разгона и торможения у пьезоэлектрического двигателя в несколько раз короче, чем у электромагнитного двигателя. В результате скоростью продвижения каретки (в знаках в секунду) данного устройства значительно выше.
Использование изобретения повышает быстродействие печати.
Формула изобретения
Устройство управления перемещением каретки пишущей машинки, содержащее блок электропривода, кинематически связанный с
23
21 23
0
узлом передачи механических перемещений каретки, блок управления перемещением каретки, узел регистрации положения каретки, расположенный на корпусе пишущей 5 мащиики, и источник питания электропривода, отличающееся тем, что, с целью повышения быстродействия печати, блок электропривода содержит пьезоэлектрические осцилляторы, установленные с возможностью взаимодействия с роторами электродвигателей, блок управления перемещением каретки содержит узел генерации сигналов реверса и узел формирования управляющих сигналов, включающий триггеры управления и ключи, при этом выходы
5 узла генерации сигналов реверса соединены с первыми входами триггеров управления, выход узла регистрации положения каретки связан с вторыми входами триггеров управления, которые выходами подключены к первым входам соответствующих
0 ключей, выход источника питания электропривода соединен с вторыми входами ключей, которые выходами связаны с выводами соответствующих пьезоэлектрических осцилляторов.
| Манипулятор | 1986 |
|
SU1378234A1 |
| Механический грохот | 1922 |
|
SU41A1 |
