ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к магнитно-резонансной реологии, в частности, к использованию навигационных устройств для того, чтобы измерять данные, характеризующие вибрацию преобразователя.
УРОВЕНЬ ТЕХНИКИ
Магнитно-резонансная реология представляет собой способ визуализации, в котором магнитно-резонансную томографию используют для того, чтобы определять характеристики механических свойств ткани. С этой целью, ткань заставляют механически колебаться во время визуализации, что ведет к определенным эффектам, которые обуславливают контраст визуализации. Низкочастотные механические волны подают в ткань и визуализируют через магнитно-резонансную последовательность, которая синхронизирована по фазе с механическим возбуждением. Пальпация превратилась в оценку объективного абсолютного физического количества, диагностическое значение которого можно определять количественно.
Эту информацию можно использовать для того, чтобы различать ткани, т. е., здоровые, злокачественные и т. д., на основе их вязкоупругих свойств, и это ведет к существенному повышению специфичности, например, для диагностики злокачественных опухолей. Предложено и продемонстрировано множество различных преобразователей для использования механических колебаний в ткани, а именно, электромагнитные конструкции, которые используют поле B0 внутри MR. Преобразователи на пьезоэлектрическом приводе или пневматические конструкции предложены для клинического применения. В патентной заявке США US 2011/025333 раскрыт пневматический привод, расположенный удаленно от MRI сканера. Привод создает поперечные волны в субъекте для осуществления MR эластографии.
Колебаний ткани достигают посредством прикрепления механического генератора колебаний к пациенту близко к области визуализации, представляющей интерес. Генератор колебаний может быть основан на электромеханическом преобразователе, таком как приводимая в действие переменным током катушка, совершающая колебания в постоянном магнитном B0 поле. Однако он может быть основан на каком-либо другом принципе, который генерирует механические колебания ткани требуемым образом и управляемо (гидродинамические, пьезоэлектрические, пневматические,... исполнительные механизмы).
Посредством корректировки надлежащего входного сигнала, генератор колебаний генерирует механические волны в организме. Сегодня величину колебаний корректируют вручную на основе опыта, например, задавая электрический ток через катушку указанного электромеханического генератора колебаний. Измерения удельного электрического сопротивления питающего проводника и проводника катушки вызывают дрейф тока и, таким образом, амплитуды генератора колебаний. Различный нагрев резистивной первичной и компенсационной катушки ведет к смещению B0 компенсации, которое ведет к B0 дрейфу и B0 артефактам.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Изобретение относится к медицинскому инструменту и компьютерному программному продукту в независимых пунктах формулы изобретения. Варианты осуществления приведены в зависимых пунктах формулы изобретения.
При осуществлении магнитно-резонансной реологии реологическую установку типично не соединяют с экспериментом по визуализации (по времени) или не приспосабливают к определенному пациенту (размер тела, соединение между механическим генератором колебаний и тканью), отсутствует обратная связь между установками генератора колебаний, достигаемой механической величиной и результатом визуализации. Колебания переключают вручную перед тем как начать и остановить эксперимент по визуализации после всей последовательности измерений. Варианты осуществления изобретения могут быть направлены на эти проблемы и другие, посредством использования навигационных устройств, имеющих импульсные последовательности с пространственным кодированием, чтобы получать данные, характеризующие вибрации преобразователя.
Специалист в данной области примет во внимание, что аспекты по настоящему изобретению можно осуществлять в виде аппарата, способа или компьютерного программного продукта. Соответственно, аспекты по настоящему изобретению могут принимать форму варианта осуществления полностью в аппаратном обеспечении, варианта осуществления полностью в программном обеспечении (включая встроенное программное обеспечение, резидентное программное обеспечение, микрокод и т. д.) или варианта осуществления, объединяющего аспекты программного обеспечения и аппаратного обеспечения, которые все в целом могут упоминаться в настоящем документе в качестве «схемы», «модуля» или «системы», Кроме того, аспекты по настоящему изобретению могут принимать форму компьютерного программного продукта, воплощенного в одном или более машиночитаемых носителях, имеющих машиноисполняемый код, воплощенный в них.
Можно использовать любую комбинацию одной или более машиночитаемых носителей. Машиночитаемый носитель может представлять собой носитель машиночитаемых сигналов или машиночитаемый запоминающий носитель. «Машиночитаемый запоминающий носитель», используемый в настоящем документе, охватывает любой материальный запоминающий носитель, который может хранить инструкции, которые может исполнять процессор вычислительного устройства. Машиночитаемый запоминающий носитель можно обозначать как машиночитаемый постоянный запоминающий носитель. Машиночитаемый запоминающий носитель также можно обозначать как материальный машиночитаемый носитель. В некоторых вариантах осуществления машиночитаемый запоминающий носитель также может быть способен хранить данные, доступ к которым может осуществлять процессор вычислительного устройства. Примеры машиночитаемых запоминающих носителей включают в себя, но не ограничиваясь этим: гибкий диск, привод магнитного жесткого диска, твердотельный жесткий диск, флэш-память, USB-накопитель, оперативное запоминающее устройство (RAM), постоянное запоминающее устройство (ROM), оптический диск, магнитооптический диск и файл регистров процессора. Примеры оптических дисков включают компакт-диски (CD) и цифровые универсальные диски (DVD), например, диски CD-ROM, CD-RW, CD-R, DVD-ROM, DVD-RW или DVD-R. Термин «машиночитаемый запоминающий носитель» также относится к носителям записи различных типов, доступ к которым может осуществлять вычислительное устройство через сеть или канал связи. Например, данные можно извлекать через модем, через интернет или через локальную сеть. Машиноисполняемый код, воплощенный в машиночитаемом носителе, можно передавать с использованием любого подходящего носителя, включая в качестве неограничивающих примеров беспроводные, проводные, оптоволоконные кабельные, РЧ и т. д. или любые подходящие комбинации приведенных выше.
Носитель машиночитаемых сигналов может содержать распространяемый сигнал данных с машиноисполняемым кодом, содержащимся в нем, например, в базовом диапазоне или в качестве части волны-носителя. Такой распространяемый сигнал может принимать какую-либо из множества форм, включая в качестве неограничивающих примеров, электромагнитную, оптическую или любое подходящее их сочетание. Носитель машиночитаемых сигналов может представлять собой какой-либо машиночитаемый носитель, который не является машиночитаемым запоминающим носителем и который может передавать, распространять или транспортировать программу для использования посредством или применительно к системе, аппарату или устройству исполнения инструкций.
«Компьютерная память» или «память» представляет собой пример машиночитаемого запоминающего носителя. Компьютерная память представляет собой какую-либо память, к которой процессор может осуществлять непосредственный доступ. «Компьютерный накопитель» или «накопитель» представляет собой дополнительный пример машиночитаемого запоминающего носителя. Компьютерный накопитель представляет собой какой-либо энергонезависимый машиночитаемый запоминающий носитель. В некоторых вариантах осуществления компьютерный накопитель также может представлять собой компьютерную память или наоборот.
«Процессор», как используют в настоящем документе, охватывает электронный компонент, который способен исполнять программу или машиноисполняемую инструкцию или машиноисполняемый код. Ссылки на вычислительное устройство, которое содержит «процессор», следует интерпретировать как возможно содержащее больше чем один процессор или вычислительное ядро. Процессор, например, может представлять собой многоядерный процессор. Процессор также может относиться к совокупности процессоров в пределах одной компьютерной системы или распространенных среди множества компьютерных систем. Термин вычислительное устройство также следует интерпретировать как возможно относящийся к совокупности или сети вычислительных устройств, каждое содержит процессор или процессоры. Машиноисполняемый код можно исполнять с помощью множества процессоров, которые могут находиться в пределах одного и того же вычислительного устройства или которые даже могут быть распределены по множеству вычислительных устройств.
Машиноисполняемый код может содержать машиноисполняемые инструкции или программу, которая управляет процессором для того, чтобы осуществлять аспект по настоящему изобретению. Машиноисполняемый код для осуществления операций для аспектов по настоящему изобретению может быть записан на какой-либо комбинации одного или нескольких языков программирования, включая язык объектно-ориентированного программирования, такой как Java, Smalltalk, C++ или тому подобное, и стандартные процедурные языки программирования, такие как язык программирования «C» или схожие языки программирования, и компилирован в машиноисполняемые инструкции. В некоторых случаях машиноисполняемый код может быть в форме языка высокого уровня или в предварительно компилированной формы и может быть использован в сочетании с интерпретатором, который генерирует машиноисполняемые инструкции на лету.
Машиноисполняемый код можно исполнять полностью на компьютере пользователя, частично на компьютере пользователя, в качестве обособленного пакета программного обеспечения, частично на компьютере пользователя и частично на удаленном компьютере или полностью на удаленном компьютере или сервере. В последнем сценарии удаленный компьютер можно соединять с компьютером пользователя через сеть любого типа, включая локальную сеть (LAN) или глобальную сеть (WAN), или соединение можно создавать с внешним компьютером (например, через интернет с использованием поставщика услуг интернета).
Аспекты по настоящему изобретению описаны со ссылкой на иллюстрации блок-схем и/или блочных диаграмм способов, аппаратов (систем) и компьютерных программных продуктов согласно вариантам осуществления изобретения. Понятно, что каждый блок или часть блоков блок-схемы, иллюстраций и/или блочных диаграмм можно реализовать посредством компьютерных программных инструкций в форме машиноисполняемого кода, когда это применимо. Кроме того, понятно, что когда не являются взаимоисключающими, можно создавать комбинации блоков в различных блок-схемах, иллюстрациях и/или блочных диаграммах. Эти компьютерные программные инструкции можно предоставлять процессору компьютера общего назначения, компьютеру специального назначения или другому программируемому аппарату обработки данных для того, чтобы создавать такую машину, что инструкции, которые исполняют с помощью процессора компьютера или другого программируемого аппарата обработки данных, создают средство для реализации функций/действии, точно определенных в блоке или блоках блок-схемы и/или блочной диаграммы.
Эти компьютерные программные инструкции также можно хранить в машиночитаемом носителе, и они могут управлять компьютером, другим программируемым устройством обработки данных или другими устройствами для того, чтобы они функционировали конкретным образом, так что инструкции, хранимые в машиночитаемом носителе, создают промышленное изделие, содержащее инструкции, которые реализуют функцию/действие, точно определенное в блоке или блоках блок-схемы и/или блочной диаграммы.
Компьютерные программные инструкции также можно загружать в компьютер, другой программируемый аппарат обработки данных или другие устройства для того, чтобы управлять последовательностью рабочих стадий, подлежащих осуществлению на компьютере, другом программируемом аппарате или других устройствах для того, чтобы получать реализованный на компьютере процесс так, что инструкции, которые исполняют на компьютере или другом программируемом аппарате, предусматривают процессы для реализации функций/действий, точно определенных в блоке или блоках блок-схемы и/или блочной диаграммы.
«Пользовательской интерфейс», как используют в настоящем документе, представляет собой интерфейс, который позволяет пользователю или оператору взаимодействовать с компьютером или компьютерной системой. «Пользовательский интерфейс» также можно обозначать как «устройство с человеческим интерфейсом». Пользовательский интерфейс может предоставлять информацию или данные оператору и/или принимать информацию или данные от оператора. Пользовательский интерфейс может позволять воспринимать ввод от оператора с помощью компьютера и может обеспечивать вывод пользователю из компьютера. Другими словами, пользовательский интерфейс может позволять оператору управлять или манипулировать компьютером, и интерфейс может позволять компьютеру отображать эффекты управления или манипуляций оператора. Отображение данных или информации на устройстве отображения или в графическом пользовательском интерфейсе является примером предоставления информации оператору. Прием данных через клавиатуру, мышь, шаровой манипулятор, сенсорную панель, ручку-указатель, графический планшет, джойстик, игровой джойстик, веб-камеру, головную гарнитуру, рычаг переключения передач, рулевое колесо, педали, проводную перчатку, танцевальную панель, пульт дистанционного управления и датчик ускорения являются примерами компонентов пользовательского интерфейса, которые позволяют принимать информацию или данные от оператора.
«Аппаратный интерфейс», как используют в настоящем документе, охватывает интерфейс, который позволяет процессору компьютерной системы взаимодействовать с внешним вычислительным устройством и/или аппаратом и/или управлять им. Аппаратный интерфейс может позволять процессору посылать управляющие сигналы или инструкции на внешнее вычислительное устройство и/или аппарат. Аппаратный интерфейс также может позволять процессору обмениваться данными с внешним вычислительным устройством и/или аппаратом. Примеры аппаратного интерфейса включают, но не ограничиваясь этим: универсальную последовательную шину, порт IEEE 1394, параллельный порт, порт IEEE 1284, последовательный порт, порт RS-232, порт IEEE-488, соединение Bluetooth, соединение по беспроводной локальной сети, соединение TCP/IP, соединение Ethernet, интерфейс напряжения управления, MIDI интерфейс, интерфейс аналогового ввода и интерфейс цифрового ввода.
«Дисплей» или «устройство отображения», используемые в настоящем документе, охватывают устройство вывода или пользовательский интерфейс, адаптированный для отображения изображений или данных. Устройство отображения может выводить визуальные, звуковые и/или тактильные данные. Примеры устройства отображения включают в себя, но не ограничиваясь этим: монитор компьютера, телевизионный экран, чувствительный к прикосновениям экран, тактильный электронный дисплей, экран Брайля, электронно-лучевую трубку (CRT), запоминающую трубку, бистабильный дисплей, электронную бумагу, векторный дисплей, плоский дисплей, вакуумный флуоресцентный дисплей (VF), дисплеи на светоизлучающих диодах (LED), электролюминесцентный дисплей (ELD), плазменные панели (PDP), жидкокристаллический дисплей (LCD), дисплеи на органических светоизлучающих диодах (OLED), проектор и головной дисплей.
Данные магнитного резонанса (MR) определяют в настоящем документе как измерения радиочастотных сигналов, испускаемых спинами атомов, зарегистрированные посредством антенны магнитно-резонансного аппарата во время сканирования магнитно-резонансной визуализации. Данные магнитного резонанса представляют собой пример данных медицинского изображения. Изображение магнитно-резонансной визуализации (MRI) определяют в настоящем документе в качестве реконструированной двух- или трехмерной визуализации анатомических данных, содержащихся в данных магнитно-резонансной визуализации. Эту визуализацию можно осуществлять с использованием компьютера. Часть данных магнитного резонанса также может относиться к «снимку». Данные навигационного устройства представляют собой пример данных магнитного резонанса, и типично представляют местоположение субъекта или состояние движения.
В одном из аспектов изобретение относится к системе магнитно-резонансной визуализации для получения данных магнитного резонанса из зоны визуализации. Система магнитно-резонансной визуализации содержит процессор для управления системой магнитно-резонансной визуализации. Система магнитно-резонансной визуализации дополнительно содержит память для хранения машиноисполняемых инструкций для исполнения процессором. Исполнение машиноисполняемых инструкций управляет процессором для того, чтобы повторно управлять системой магнитно-резонансной визуализации для того, чтобы получать часть данных магнитного резонанса. Каждая часть данных магнитного резонанса содержит данные навигационного устройства. Для некоторых протоколов магнитно-резонансной визуализации данные можно получать в течение периода в минуты. Часть данных магнитного резонанса относится к части данных магнитного резонанса, которые получают в течение полного протокола.
Данные навигационного устройства, как используют в настоящем документе, представляют собой пример данных магнитного резонанса. Данные навигационного устройства также могут представлять собой данные изображения и/или данные в k-пространстве, которые извлекают из части данных магнитного резонанса. Данные навигационного устройства, как используют в настоящем документе, охватывают данные магнитного резонанса, которые отражают движение субъекта. Например, если субъект полностью неподвижен внутренне и внешне, то данные навигационного устройства не должны изменять. Однако если субъект перемещается или внутренне перемещается, тогда данные навигационного устройства можно использовать для представления или количественного определения этого движения. В вариантах осуществления изобретения, данные навигационного устройства также используют для того, чтобы выводить по меньшей мере один параметр, характеризующий вибрацию преобразователя.
В одном из аспектов изобретение относится к медицинскому инструменту, который содержит систему магнитно-резонансной визуализации для получения данных магнитного резонанса от субъекта по меньшей мере частично в пределах зоны визуализации. Медицинский инструмент дополнительно содержит преобразователь для механических вибраций по меньшей мере части субъекта в пределах зоны визуализации. Преобразователь способен вибрировать с достаточной частотой, фазой и амплитудой для того, чтобы осуществлять магнитно-резонансную реологию. При магнитно-резонансной реологии ткани вибрируют одновременно с использованием импульсной последовательности с пространственным кодированием для того, чтобы пространственно кодировать магнитные спины.
Когда получают фазовую карту с использованием полученных данных магнитного резонанса, можно выводить эластические свойства вибрирующей области. Медицинский инструмент дополнительно содержит контроллер преобразователя для управления амплитудой и фазой вибраций преобразователя. Медицинский инструмент дополнительно содержит процессор для управления медицинским инструментом. Медицинский инструмент дополнительно содержит память для хранения машиноисполняемых инструкций для исполнения посредством процессора. Исполнение машиноисполняемых инструкций управляет процессором для того, чтобы управлять контроллером преобразователя так, что вызывают вибрации преобразователя.
Исполнение инструкций дополнительно управляет процессором для того, чтобы управлять системой магнитно-резонансной визуализации для того, чтобы повторно получать данные магнитного резонанса из первой области, представляющей интерес, с использованием первой импульсной последовательности с пространственным кодированием во время вибрации преобразователя. Исполнение инструкций дополнительно управляет процессором для того, чтобы управлять системой магнитно-резонансной визуализации для того, чтобы получать данные навигационного устройства из второй области, представляющей интерес, с использованием второй импульсной последовательности с пространственным кодированием. Исполнение инструкций обеспечивает чередование получения данных магнитного резонанса с получением данных навигационного устройства. Исполнение инструкций дополнительно управляет процессором для того, чтобы конструировать набор профилей навигационного устройства с использованием данных навигационного устройства. Профили навигационного устройства представляют собой данные, которые описывают движение субъекта, который вибрирует с помощью преобразователя.
Исполнение инструкций дополнительно управляет процессором для того, чтобы определять по меньшей мере один параметр, характеризующий вибрации преобразователя с использованием набора профилей навигационного устройства. Исполнение инструкций дополнительно управляет процессором для того, чтобы реконструировать по меньшей мере одно магнитно-резонансное реологическое изображение по данным магнитного резонанса. Понятно, что данные навигационного устройства, как используют в настоящем документе, охватывают данные магнитного резонанса. Вторая импульсная последовательность с пространственным кодированием может определять вторую область, представляющую интерес. В некоторых вариантах осуществления вторая область, представляющая интерес, может иметь тот же размер или быть меньше, чем первая область, представляющая интерес. Вторая импульсная последовательность с пространственным кодированием также может быть разработана так, что она дает данные навигационного устройства значительно быстрее, чем данные магнитного резонанса.
Варианты осуществления изобретения могут иметь такое преимущество, что по меньшей мере один параметр, характеризующий преобразователь, можно получать быстро в сравнении с получением данных магнитного резонанса. Его можно, например, использовать для различных целей, таких как активное управление преобразователем или обнаружение, если преобразователь функционирует должным образом.
Данные навигационного устройства также можно считать получаемыми повторно. В некоторых вариантах осуществления по меньшей мере один параметр может представлять собой параметр, характеризующий амплитуду и/или фазу вибрации преобразователя. Навигационное устройство, как используют в настоящем документе, включает данные магнитного резонанса, которые получают для того, чтобы определять информацию о пространстве или движении, которая описывает субъект.
В некоторых вариантах осуществления преобразователь достаточно вибрирует в контакте с субъектом. В некоторых вариантах осуществления профиль навигационного устройства можно реконструировать во время получения данных магнитного резонанса. В некоторых вариантах осуществления набор профилей навигационного устройства может иметь только один профиль навигационного устройства.
Преобразователь можно реализовать множеством различных путей. Например, преобразователь можно конструировать с использованием катушки, и можно использовать магнитное поле системы магнитно-резонансной визуализации в сочетании с катушкой для того, чтобы получать эффект вибрации. В других вариантах осуществления пневматические, приводимые в действие жидкостью и пьезоэлектрические преобразователи также можно использовать для осуществления механических вибраций.
В некоторых вариантах осуществления профили навигационного устройства можно конструировать в k-пространстве. В других вариантах осуществления профили навигационного устройства можно конструировать для изображений, реконструированных по данным навигационного устройства.
В другом варианте осуществления исполнение инструкций дополнительно управляет процессором для того, чтобы обнаруживать периодические вариации контраста в наборе профилей навигационного устройства. Исполнение инструкций дополнительно управляет процессором для того, чтобы определять по меньшей мере один параметр по меньшей мере частично для осуществления любого одного из следующего: определение амплитуды преобразователя с использованием периодических вариаций контраста, определение фазы преобразователя посредством определения расстояния между периодическими вариациями контраста и их сочетания. Этот анализ можно осуществлять в k-пространстве или его можно осуществлять на реконструированных изображениях. Этот вариант осуществления может быть полезен, поскольку он может иметь преимущество адаптируемости для того, чтобы быстро определять амплитуду и/или фазу вибраций, вызываемых в субъекте.
В другом варианте осуществления медицинский инструмент дополнительно содержит устройство отображения. Исполнение инструкций дополнительно управляет процессором для того, чтобы отображать по меньшей мере один параметр на устройстве отображения во время получения данных магнитного резонанса. Исполнение инструкций дополнительно управляет процессором для того, чтобы отображать объект пользовательского интерфейса на устройстве отображения. Исполнение инструкций дополнительно управляет процессором для того, чтобы принимать команду корректировки преобразователя от объекта пользовательского интерфейса. Исполнение инструкций дополнительно управляет процессором для того, чтобы генерировать управляющую команду модификации вибрации с использованием команды корректировки преобразователя. Исполнение инструкций дополнительно управляет процессором для того, чтобы регулировать вибрации преобразователя с использованием управления преобразователем и управления модификацией вибрации. То есть, это значение по меньшей мере одного параметра можно отображать в графическом пользовательском интерфейсе для субъекта или оператора, и оператор может использовать графический пользовательский интерфейс для того, чтобы регулировать уровень амплитуды и/или фазы вибраций. Процессор генерирует управление модификацией вибрации, которое затем посылают на контроллер, которое управляет им для того, чтобы изменять амплитуду и/или фазу вибрации преобразователя.
В другом варианте осуществления медицинский инструмент дополнительно содержит датчик вибрации для получения данных датчика. Исполнение инструкций дополнительно управляет процессором для того, чтобы получать данные датчика во время вибрации преобразователя. По меньшей мере один параметр частично определяют с использованием данных датчика. Этот вариант осуществления может быть полезен, поскольку внешний датчик можно использовать для того, чтобы дополнять данные навигационного устройства для того, чтобы определять по меньшей мере один параметр.
В другом варианте осуществления датчик вибрации выполнен с возможностью любого одного из следующего: установки на преобразователе и установки на поверхности субъекта. Установка на преобразователе может представлять собой преимущество, поскольку можно выполнять непосредственные измерения того, как преобразователь вибрирует механически. Например, если преобразователь функционирует с использованием катушки и магнитного поля системы магнитно-резонансной визуализации, небольшие изменения в выравнивании могут изменять фазу и/или амплитуду преобразователя. Установка датчика непосредственно на преобразователь будет давать непосредственную обратную связь. Установку датчика вибрации непосредственно на поверхности субъекта можно использовать несколькими различными путями. Например, это может обеспечивать непосредственное измерение, если преобразователь уже в контакте с субъектом. Например, во время процедуры преобразователь может отваливаться, и это можно обнаруживать незамедлительно.
В другом варианте осуществления датчик вибрации представляет собой любое одно из следующего: датчик ускорения, тензодатчик, датчик давления, пьезоэлектрический преобразователь, микрофон и их сочетания.
В другом варианте осуществления преобразователь содержит по меньшей мере магнитный датчик для измерения данных магнитного датчика. Исполнение инструкций дополнительно содержит определение по меньшей мере одного параметра по меньшей мере частично с использованием данных магнитного датчика. Данные магнитного датчика, например, могут описывать абсолютную величину магнитного поля, направление магнитного поля или изменение магнитного поля. Это может быть полезно для функционирования преобразователя в магнитном поле должным образом, в частности, если это является вариантом осуществления, где используют катушку. В некоторых вариантах осуществления магнитный датчик представляет собой датчик на эффекте Холла. Это может обеспечивать абсолютные измерения. В других вариантах осуществления магнитный датчик может представлять собой принимающую катушку, которая предоставляет информацию об относительном движении только преобразователя.
В другом варианте осуществления система магнитно-резонансной визуализации содержит основной магнит. Основной магнит действует для генерации магнитного поля B0. Определение по меньшей мере одного параметра по меньшей мере частично с использованием данных магнитного датчика включает определение ориентации преобразователя относительно поля B0. Это по существу определяет ориентацию датчика относительно магнитного поля, но поскольку датчик наиболее вероятно установлен на преобразователе, ориентация преобразователя относительно датчика известна. Это может обеспечивать более согласованную работу преобразователя, в частности, когда преобразователь приводят в действие с использованием катушки.
В другом варианте осуществления система магнитно-резонансной визуализации дополнительно содержит устройство отображения для выравнивания. Исполнение инструкций дополнительно управляет процессором для того, чтобы отображать ориентацию датчика относительно поля B0 на устройстве отображения для выравнивания во время получения данных магнитного резонанса. Это может представлять собой, например, изображение, отображаемое в графическом пользовательском интерфейсе на устройстве отображения. Или он также может содержать лампы или другие индикаторы вблизи от системы магнитно-резонансной визуализации так, что оператор или другой профессиональный медик может должным образом выравнивать преобразователь относительно поля B0.
В другом варианте осуществления медицинский инструмент дополнительно содержит корректируемый поршень. Корректируемый поршень содержит поверхность контакта. Корректируемый поршень пригоден для передачи вибрации между преобразователем и поверхностью контакта. Корректируемый поршень пригоден для управления посредством процессора. Исполнение инструкций управляет процессором для того, чтобы регулировать корректируемый поршень в соответствии с по меньшей мере одним параметром. Этот вариант осуществления может быть полезен, поскольку по меньшей мере один параметр можно использовать для того, чтобы регулировать корректируемый поршень так, что передача вибраций от преобразователя субъекту происходит более эффективно.
В другом варианте осуществления поверхность контакта пригодна для надувания и сдувания. Процессор пригоден для управления надуванием и сдуванием надувной поверхностью контакта. Надувную поверхность контакта можно формировать в качестве поверхности надувной головки преобразователя или кончика преобразователя. Этот вариант осуществления может быть полезен, поскольку он может управлять соединением между преобразователем и субъектом.
В другом варианте осуществления корректируемый поршень пригоден для регулирования расстояния между преобразователем и поверхностью контакта. Процессор пригоден для управления расстоянием между преобразователем и поверхностью контакта. Это может быть полезно для того, чтобы должным образом корректировать соединение между субъектом и преобразователем.
В другом варианте осуществления поверхность контакта пригодна для регулирования угла между корректируемым поршнем и поверхностью контакта. Процессор пригоден для управления углом между преобразователем и поверхностью контакта. Это может быть полезно, поскольку, в частности, если преобразователь относится к катушечному типу, который использует поле B0 для приведения его в действие, угол между преобразователем и полем B0 является критичным. Делая возможной корректировку угла между корректируемым поршнем и поверхностью контакта, предоставляют больше свободы для эффективного соединения преобразователя с субъектом.
В другом варианте осуществления поверхность контакта имеет корректируемую площадь поверхности. Процессор пригоден для управления корректируемой площадью поверхности. Например, поверхность контакта может представлять собой две пластины, которые скользят друг позади друга и расстоянием между ними управляет механизм определенного рода. Например, гидравлический, воздушный или небольшой двигатель можно использовать для того, чтобы изменять расстояние между пластинами. Это может быть полезно, поскольку это можно использовать для воздействия на область или размер области, которая вибрирует на субъекте.
В другом аспекте изобретение относится к компьютерному программному продукту для исполнения посредством процессора, управляющего медицинским инструментом. Медицинский инструмент содержит систему магнитно-резонансной визуализации для получения данных магнитного резонанса от субъекта по меньшей мере частично в пределах зоны визуализации. Медицинский инструмент дополнительно содержит преобразователь для механических вибраций по меньшей мере в части субъекта в пределах зоны визуализации. Медицинский инструмент дополнительно содержит контроллер преобразователя для управления амплитудой/фазой вибраций преобразователя. Исполнение инструкций управляет процессором для того, чтобы управлять преобразователем, чтобы он вибрировал. Исполнение инструкций дополнительно управляет процессором для того, чтобы управлять системой магнитно-резонансной визуализации для того, чтобы повторно получать данные магнитного резонанса из первой область, представляющей интерес, с использованием первой импульсной последовательности с пространственным кодированием во время вибрации преобразователя.
Исполнение инструкций дополнительно управляет процессором для того, чтобы управлять системой магнитно-резонансной визуализации для того, чтобы получать данные навигационного устройства из второй области, представляющей интерес, с использованием второй импульсной последовательности с пространственным кодированием. Исполнение инструкций дополнительно обеспечивает чередование получения данных магнитного резонанса с получением данных навигационного устройства. Исполнение инструкций дополнительно управляет процессором для того, чтобы конструировать набор профилей навигационного устройства с использованием данных навигационного устройства. Исполнение инструкций дополнительно управляет процессором для того, чтобы определять по меньшей мере один параметр, характеризующий преобразователь, с использованием набора профилей навигационного устройства. Исполнение инструкций дополнительно управляет процессором для того, чтобы реконструировать по меньшей мере одно магнитно-резонансное реологическое изображение по данным магнитного резонанса.
В другом аспекте изобретение относится к способу управления медицинским инструментом. Медицинский инструмент содержит систему магнитно-резонансной визуализации для получения данных магнитного резонанса от субъекта по меньшей мере частично в пределах зоны визуализации. Медицинский инструмент дополнительно содержит преобразователь для механических вибраций по меньшей мере в части субъекта в пределах зоны визуализации. Медицинский инструмент дополнительно содержит контроллер преобразователя для управления амплитудой, частотой, фазой вибраций преобразователя. Способ включает стадию управления преобразователем для того, чтобы он вибрировал. Способ дополнительно включает стадию управления системой магнитно-резонансной визуализации для того, чтобы повторно получать данные магнитного резонанса из первой области, представляющей интерес, с использованием первой импульсной последовательности с пространственным кодированием во время вибрации преобразователя.
Способ дополнительно включает стадию управления системой магнитно-резонансной визуализации для того, чтобы получать данные навигационного устройства из второй области, представляющей интерес, с использованием второй импульсной последовательности с пространственным кодированием. Получение данных магнитного резонанса чередуют с получением данных навигационного устройства. Способ дополнительно включает конструирование набора профилей навигационного устройства с использованием данных навигационного устройства. Способ дополнительно включает определение по меньшей мере одного параметра, характеризующего преобразователь, с использованием набора профилей навигационного устройства. Способ дополнительно включает реконструирование по меньшей мере одного магнитно-резонансного реологического изображения по данным магнитного резонанса.
Понятно, что один или несколько пунктов формулы изобретения и/или один или несколько указанных выше вариантов осуществления изобретения можно комбинировать до тех пор, пока комбинированные варианты осуществления не являются взаимоисключающими.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Далее описаны предпочтительные варианты осуществления изобретения, только в качестве примера и со ссылкой на чертежи, на которых:
на фиг. 1 представлен последовательность операций, которая иллюстрирует способ согласно одному из вариантов осуществления изобретения;
на фиг. 2 проиллюстрирован пример медицинского инструмента согласно одному из вариантов осуществления изобретения;
на фиг. 3 представлен детализированный вид зоны визуализации, проиллюстрированной на фиг. 2;
на фиг. 4 представлен медицинский инструмент согласно дополнительному варианту осуществления изобретения;
на фиг. 5 представлено схематическое изображение медицинского аппарата согласно дополнительному варианту осуществления изобретения;
на фиг. 6 проиллюстрирован пример контура 600 управления с обратной связью;
на фиг. 7 представлен конкретный вариант осуществления контроллера 602 с обратной связью;
на фиг. 8 проиллюстрирован, как изображения и/или данные навигационного устройства можно использовать для того, чтобы определять по меньшей мере один параметр, характеризующий преобразователь;
на фиг. 9 дополнительно проиллюстрировано, как изображения и/или данные навигационного устройства можно использовать для того, чтобы определять по меньшей мере один параметр, характеризующий преобразователь;
на фиг. 10 дополнительно проиллюстрировано, как изображения и/или данные навигационного устройства можно использовать для того, чтобы определять по меньшей мере один параметр, характеризующий преобразователь;
на фиг. 11 дополнительно проиллюстрировано, как изображения и/или данные навигационного устройства можно использовать для того, чтобы определять по меньшей мере один параметр, характеризующий преобразователь;
на фиг. 12 дополнительно проиллюстрировано, как изображения и/или данные навигационного устройства можно использовать для того, чтобы определять по меньшей мере один параметр, характеризующий преобразователь;
на фиг. 13 дополнительно проиллюстрировано, как изображения и/или данные навигационного устройства можно использовать для того, чтобы определять по меньшей мере один параметр, характеризующий преобразователь;
на фиг. 14 проиллюстрирован преобразователь, который встроен в сборочный узел, который содержит датчики магнитного поля;
на фиг. 15 представлен пример контура с обратной связью, используемого для того, чтобы управлять устройство, представленным на фиг. 14;
на фиг. 16 проиллюстрирован преобразователь согласно одному из вариантов осуществления изобретения;
на фиг. 17 проиллюстрирован преобразователь согласно дополнительному варианту осуществления изобретения;
на фиг. 18 проиллюстрирован преобразователь согласно дополнительному варианту осуществления изобретения;
на фиг. 19 проиллюстрирован преобразователь согласно дополнительному варианту осуществления изобретения;
на фиг. 20 представлена реализация варианта осуществления преобразователя, представленного на фиг. 17;
на фиг. 21 представлен альтернативный вариант осуществления варианта осуществления преобразователя, представленного на фиг. 20; и
на фиг. 22 представлен пример контура 2200 управления для автоматического конфигурирования эксплуатационных характеристик преобразователя.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Элементы с подобными ссылочными обозначениями на этих фиг. или представляют собой эквивалентные элементы или осуществляют одинаковую функцию. Элементы, которые рассмотрены ранее, не обязательно рассмотрены на последующих фиг., если функция эквивалентна.
На фиг. 1 представлена последовательность операций, которая иллюстрирует способ согласно одному из вариантов осуществления изобретения. На стадии 100 преобразователем или контроллером преобразователя управляют для того, чтобы вызывать вибрации преобразователя. Затем на стадии 102 данные магнитного резонанса повторно получают из первой области, представляющей интерес, с использованием первой импульсной последовательности с пространственным кодированием. Затем на стадии 104 данные навигационного устройства повторно получают из второй области, представляющей интерес, с использованием второй импульсной последовательности с пространственным кодированием. Данные магнитного резонанса и данные навигационного устройства получают поочередно. По существу, стадии 102 и стадии 104 повторяют много раз и точный порядок этой последовательности операций не является значимым. Затем на стадии 106 набор профилей навигационного устройства конструируют с использованием данных навигационного устройства. Затем на стадии 108 по меньшей мере один параметр определяют с использованием набора профилей навигационного устройства, который описывает преобразователь. И наконец на стадии 110 по меньшей мере одно магнитно-резонансное реологическое изображение реконструируют по данным магнитного резонанса.
На фиг. 2 проиллюстрирован пример медицинского инструмента 200 согласно одному из вариантов осуществления изобретения. Медицинский инструмент 200 содержит систему 202 магнитно-резонансной визуализации, которая содержит магнит 204. Магнит 204 представляет собой цилиндрический магнит 204 сверхпроводящего типа с каналом 206 через него. Также возможно использование магнитов различных типов, например, также возможно использовать и разделенный цилиндрический магнит и так называемый открытый магнит. Раздельный цилиндрический магнит похож на стандартный цилиндрический магнит, за исключением того, что криостат разделен на две секции для того, чтобы сделать возможным доступ к изоплоскоти магнита, такие магниты, например, можно использовать в сочетании с терапией пучком заряженных частиц. Открытый магнит имеет две секции магнита, одна над другой, с пространством между ними, которое достаточно велико для того, чтобы вмещать субъект: расположение двух секций магнита схоже с катушкой Гельмгольца. Открытые магниты популярны, поскольку субъект менее ограничен. Внутри криостата цилиндрического магнита находится совокупность сверхпроводящих катушек. Внутри канала 206 цилиндрического магнита 204 находится зона 208 визуализации, где магнитное поле является достаточно сильным и однородным для того, чтобы осуществлять магнитно-резонансную визуализацию.
Внутри канала 206 магнита также находится набор катушек 210 градиентного магнитного поля, которые используют для получения данных магнитного резонанса для того, чтобы пространственно кодировать магнитные спины в пределах зоны 208 визуализации магнита 204. Катушки 210 градиентного магнитного поля соединяют с источником 212 питания катушек градиентного магнитного поля. Катушки 210 градиентного магнитного поля предназначены быть представительными. Типично катушки 210 градиентного магнитного поля содержат три отдельных набора катушек для пространственного кодирования в трех ортогональных пространственных направлениях. Источник питания градиентного магнитного поля подает ток на катушки градиентного магнитного поля. Током, который подают на катушки 210 градиентного магнитного поля, управляют в качестве функции времени, и он может линейно менять или носить импульсный характер.
Смежно с зоной 208 визуализации находится радиочастотная катушка 214 для манипуляции ориентациями магнитных спинов в пределах зоны 208 визуализации и для приема радиопередач от спинов также в пределах зоны 208 визуализации. Радиочастотная антенна может содержать множество катушечных элементов. Радиочастотную антенну также можно обозначать как канал или антенну. Радиочастотную катушку 214 соединяют с радиочастотным приемопередатчиком 216. Радиочастотную катушку 214 и радиочастотный приемопередатчик 216 можно заменить на отдельные передающие и принимающие катушки и отдельные передатчик и приемник. Понятно, что радиочастотная катушка 214 и радиочастотный приемопередатчик 216 являются репрезентативными. Радиочастотная катушка 214 также предназначена представлять специализированную передающую антенну и специализированную принимающую антенну. Аналогичным образом, приемопередатчик 216 также может представлять отдельные передатчик и приемники.
Преобразователь 222 показан установленным на поверхности субъекта 218. Преобразователь 222 соединяют с контроллером 224 преобразователя, который предоставляет энергию для приведения преобразователя 222 в действие. Преобразователь 222 вызывает вибрации в субъекте 218. Стрелка 226 показывает направление вибраций, вызываемых в субъекте 218. Преобразователь 222 и стрелка 226 предназначены быть репрезентативными. В некоторых вариантах осуществления преобразователь и стрелку 226 предпочтительно выравнивают с магнитным полем магнита 204, поскольку преобразователь 222 использует магнитное поле в сочетании с катушкой для того, чтобы вызывать вибрации. Однако преобразователь 222 и контроллер 224 преобразователя являются репрезентативными и могут предоставлять преобразователи 222 и контроллеры 224 преобразователя множества различных типов.
Например, преобразователи могут представлять систему катушек, пневматическую систему, систему, приводимую в действие жидкостью и пьезоэлектрический преобразователь. В пределах зоны 208 визуализации представлена первая область 228, представляющая интерес, и вторая область 230, представляющая интерес. Первая область 228, представляющая интерес, представляет собой область, в которой получают данные магнитного резонанса. Вторая область 230, представляющая интерес, представляет собой область, представляющую интерес, в которой получают данные навигационного устройства. В этом варианте осуществления вторая область 230, представляющая интерес, представляет собой подмножество первой области 228, представляющей интерес. Однако в некоторых вариантах осуществления они могут быть разъединены или частично разъединены. В этом варианте осуществления вторую область 230, представляющую интерес, выравнивают со стрелкой 226 для того, чтобы захватывать вибрационное движение, обусловленное преобразователем 222.
Следует отметить, что области, представляющие интерес, определяют область в пределах зоны 208 визуализации. Однако граница области, представляющей интерес, не обязательно ясно или хорошо определена. Данные магнитного резонанса или данные навигационного устройства получают в пространстве Фурье и, следовательно, они содержат вклад извне первой области 228, представляющей интерес, и второй области 230, представляющей интерес.
Источник 212 питания катушек градиентного магнитного поля, приемопередатчик 216 и контроллер 224 преобразователя соединяют с аппаратным интерфейсом 234 компьютерной системы 232. Компьютерная система 243 дополнительно содержит процессор 236. Процессор 236 соединяют с аппаратным интерфейсом 234, пользовательским интерфейсом 238, компьютерным накопителем 240 и компьютерной памятью 242.
Компьютерный накопитель 240 показан содержащим первую импульсную последовательность с пространственным кодированием 250. Первую импульсную последовательность с пространственным кодированием 250 использовали для того, чтобы управлять системой магнитно-резонансной визуализации 200 для того, чтобы получать данные 252 магнитного резонанса. Компьютерный накопитель 240 показан содержащим вторую импульсную последовательность с пространственным кодированием 254. Вторую импульсную последовательность с пространственным кодированием 254 использует система магнитно-резонансной визуализации 200 для того, чтобы получать данные 256 навигационного устройства из второй области 230, представляющей интерес. Компьютерный накопитель 240 показан содержащим профиль 258 навигационного устройства. Профиль 258 навигационного устройства определяли с использованием данных 256 навигационного устройства. Компьютерный накопитель 240, кроме того, показан содержащим параметр 260, вычисленный с использованием профиля 258 навигационного устройства. Компьютерный накопитель 240 дополнительно показан содержащим магнитно-резонансное реологическое изображение 262. Магнитно-резонансное реологическое изображение 262 вычисляли с использованием данных 252 магнитного резонанса.
Компьютерная память 242 показана содержащей управляющий модуль 264. Управляющий модуль содержит машиноисполняемый код, который позволяет процессору для того, чтобы управлять работой и функциями медицинского инструмента 200. Например, управляющий модуль 264 может использовать импульсные последовательности 250, 254 для того, чтобы получать данные 252 магнитного резонанса и данные 256 навигационного устройства. Компьютерная память 242 показана дополнительно содержащей модуль 266 конструирования профилей навигационного устройства. Модуль 266 конструирования профилей навигационного устройства содержит машиноисполняемый код, который позволяет процессору 236 реконструировать профиль 258 навигационного устройства по данным 256 навигационного устройства. Компьютерная память 242 показан дополнительно содержащей модуль 268 вычисления параметров. Модуль 268 вычисления параметров содержит машиноисполняемый код, который позволяет процессору 236 вычислять параметр 260 из профиля 258 навигационного устройства. Компьютерная память 242 показана дополнительно содержащей модуль 270 конструирования реологических изображений. Модуль 270 конструирования реологических изображений содержит машиноисполняемый код, который позволяет процессору 236 реконструировать магнитно-резонансное реологическое изображение 262 по данным 252 магнитного резонанса.
На фиг. 3 представлен детализированный вид зоны 208 визуализации с фиг. 2.
На фиг. 4 представлен медицинский инструмент 400 согласно дополнительному варианту осуществления изобретения. Медицинский инструмент на фиг. 4 схож с тем, который представлен на фиг. 2 и 3, за исключением того, что этот медицинский инструмент 400 дополнительно имеет датчик 402 вибрации. Датчик 402 вибрации предназначен быть репрезентативным. Он показан в контакте с поверхностью субъекта 218, однако в некоторых вариантах осуществления датчик 402 вибрации может быть в контакте с преобразователем 222. Датчик 402 вибрации также предназначен быть репрезентативным для датчиков вибрации различных типов. Например, датчик вибрации может представлять собой, но не ограничиваясь этим: датчик ускорения, тензодатчик, датчик давления, пьезоэлектрический преобразователь, микрофон или комбинацию множества этих датчиков.
Компьютерный накопитель 240 дополнительно показан содержащим данные 404 датчика, которые получают посредством датчика 402 вибрации во время получения данных 252 магнитного резонанса и/или данных 256 навигационного устройства. В этом варианте осуществления модуль 268 вычисления параметров дополнительно пригоден для того, чтобы позволять процессору 236 также использовать данные 404 датчика при вычислении параметра 260.
В определенном варианте осуществления изобретения можно использовать контур с обратной связью для того, чтобы повышать эффективность реологии, избегая ненужного повторения измерений из-за низкого качества (например, если ток через реологический преобразователь задан не оптимально), и для того, чтобы повышать комфорт пациента. В частности, если размер пациентов варьирует и, таким образом, распределение жира в теле меняется от пациента к пациенту, настройки реологического блока для достижения хороших результатов визуализации нужно адаптировать. Механизм автоматической настройки на основе данных визуализации и мониторинга данных генератора колебаний могут повышать ее эффективности.
Варианты осуществления изобретения могут измерять амплитуду и частоту колебаний аппликатора или окружающей ткани, а также ток через устройство в случае электромеханического преобразователя. Мониторинг эффективности аппликатора позволяет корректировать входной сигнал генератора колебаний в отношении фазы, частоты и амплитуды. Кроме того, информацию об обратной связи генерируют на основе результата визуализации. Все эти фрагменты информации объединяют в управляющем устройстве для управления генератором колебаний.
На фиг. 5 представлено схематическое изображение медицинского аппарата 500 согласно дополнительному варианту осуществления изобретения. На фиг. 5 представлена MRI система с реологическим аппликатором. Наряду с настройками для печени, известны другие применения, такие как визуализация груди или головы. Вариант осуществления, представленный на фиг. 5, схож с тем, который показан на фиг. 2 и 4. Однако на фиг. 5 представлены не все компоненты. Имеет место система 202 магнитно-резонансной визуализации с субъектом 218, расположенным на столе 220 пациента. Можно видеть, что реологический аппликатор 502 или преобразователь находится в контакте с субъектом 218. Реологический аппликатор 502 соединяют с линиями 504 управляющих сигналов и восприятия, которые пригодны для соединения с контроллером преобразователя, который не показан на этой схеме.
На фиг. 6 проиллюстрирован пример контура 600 управления с обратной связью. Контроллер 602 с обратной связью, который управляет усилителем 606, образует один из вариантов осуществления контроллера 224 преобразователя. Его используют для управления преобразователем 222. Контроллер 602 с обратной связью отвечает на задающий сигнал 604 для колебания преобразователя 222. Усилитель 606 обеспечивает непосредственную обратную связь 608 с контроллером с обратной связью. Преобразователь 222 также обеспечивает непосредственную обратную связь 612, которая представляет собой опосредованные измерения на аппликаторе. Преобразователь 222 также обеспечивает непосредственные измерения или непосредственную обратную связь 614 с контроллером 602. Непосредственные измерения представляют собой фактическое измерение механических колебаний, обусловленных преобразователем 222. Система также необязательно может иметь датчик 616 вибрации. Измерения датчиком вибрации предоставляют в качестве обратной связи 618 на блок 602 управления с обратной связью. Контроллер с обратной связью также может получать обратную связь из реконструкции 620 изображений, осуществляемой для магнитно-резонансных изображений, и также инструкций непосредственного управления от консоли 622 магнитно-резонансной системы, например, через графический пользовательский интерфейс, который оператор использует для того, чтобы управлять системой магнитно-резонансной визуализации. Обратная связь 620 в форме изображений может быть в форме диагностических изображений или в форме изображений или данных навигационного устройства.
На фиг. 6 представлен контур управления с обратной связью и измерение вводимых данных обратной связи. Пригодные данные для такого контура с обратной связью могут представлять собой частоту и амплитуду колебаний, ток через аппликатор или температуру.
Как указано выше, на фиг. 6 представлен контур управления. Реологический аппликатор является центральным элементом, который приводят в действие посредством усилителя звуковых частот (здесь: пример катушки, приводимой в действие переменным током). Входной сигнал усилителя вычисляют на основе набора значений, получаемых посредством измерений:
- Опосредованное измерение на аппликаторе: электрический ток через колебательную катушку или на усилителе
- Непосредственное измерение на аппликаторе: измерение величины механических колебаний
- Непосредственное измерение на дополнительном устройстве: датчик для механических вибраций прикрепляют к ткани пациента, например, пояс с резистивным тензодатчиком, обернутый вокруг пациента для непосредственного измерения механических вибраций ткани, или датчик ускорения измеряет механические параметры
- Полученных из реконструкции изображений/MR консоли. На основе первого реологического калибровочного измерения извлекают параметры изображения и вычисляют соответствующие результаты. На основе этих результатов величину колебаний можно уменьшать или увеличивать
- Прямая связь между MR консолью и усилителем, приводящим в действие генератор колебаний, делает возможной синхронизацию визуализирующих последовательностей и приложения механических колебаний.
Кроме того, данные в реальном времени MRI визуализирующей последовательности используют на входе в управление с обратной связью с тем, чтобы включать генератор колебаний только по необходимости.
Контур управления с обратной связью корректирует выходной сигнал в соответствии с задающим сигналом в рамках ограничений прикрепленных устройств. Весь контур с обратной связью или часть контура также можно встраивать в установку преобразователя. Связь между преобразователем и MRI системой осуществляют с использованием, например, оптической или беспроводной системы.
Автоматическую калибровку контура с обратной связью и предварительно заданные данные для различных субъектов (масса, жир, данные визуализации, база данных) можно реализовать в программном обеспечении, которое управляет контуром.
На фиг. 7 представлен конкретный вариант осуществления контроллера 602 с обратной связью. Контроллер с обратной связью, например, может быть способен принимать задающий сигнал 604 и посылать сигнал оператору 702. Оператор обозначен как компонент 700. Сигнал оператору 702 может поступать от устройства управляющей логики 704. Блок 706 сравнения может сравнивать задающий сигнал с сигналом от управляющего объекта 704. Затем его посылают во вторую поисковую таблицу 708. На выходе из второй поисковой таблицы 708 находится цифро-аналоговый преобразователь 710, который предоставляет сигнал усилителю 606, представленному на фиг. 6. Часть 704 управляющего объекта объединяет обратную связь различных типов. Например, управление 622 магнитно-резонансной консолью может иметь переключатель 716, которым управляют посредством импульсной последовательности магнитно-резонансной визуализации. Другой ввод различных типов также может быть включен. Например, сигнал 608 усилителя и обратная связь 620 на основе магнитного резонанса. Также могут иметь место различные типы входного сигнала 711 аналогового датчика, который проходит через цифро-аналоговые преобразователи 712. Также может иметь место входной сигнал 713 цифрового датчика. Различные типы входного сигнала сравнивают с первой поисковой таблицей 714. Первая поисковая таблица 714 предоставляет значение от управляющего объекта 704 блоку 706 сравнения.
На фиг. 7 представлена реализация управляющего устройства с обратной связью. Ввод задающего сигнала, измеренных сигналов, информации на основе изображения и MRI последовательности служит в качестве входного сигнала. Может требоваться оцифровка измеряемых сигналов, если сам датчик не выполняет аналогово-цифровое преобразование. Управляющая логика устройства ввода сортирует входные сигналы обратной связи согласно их важности. Ввод MRI последовательности (MR консоль) имеет наивысший приоритет: в случае, если колебания не требуются, колебания выключают. MR консоль также может останавливать колебания в случае прерывания сканирования пациентом (вызов медсестры) из-за экстренной ситуации. Вторым важным сигналом является информация на основе MRI: его сравнивают с задающим сигналом. Если не достигают определенного эффекта, например, контраста, входной сигнал усилителя корректируют в соответствии с поисковой таблицей (LUT2). Результаты LUT2 для калибровочных измерений и знаний о компонентах системы представляют собой: предел мощности усилителя или других устройств и пределы реологического аппликатора, чтобы не причинять вред пациенту. Выходной сигнал подают на усилитель, которому, вероятно, нужен аналоговый входной сигнал.
Измеряемые сигналы усилителя (ответвитель выходной мощности), датчиков на генераторе колебаний или датчика вибрации имеют важность третьего порядка. Их можно использовать для того, чтобы проверять настройку устройства. Пример: эффект пропуска на измеренном MR изображении может являться результатом слабых колебаний реологического аппликатора. Тогда нужно увеличивать выходной сигнал усилителя. Однако это также может являться результатом утраты механического соединения реологического аппликатора с тканью. Такую ошибку можно обнаруживать в управляющей логике устройства ввода, сравнивая датчики на различных ступенях цепи. Границы и допустимые диапазоны для сигналов, происходящих из различных частей цепи, хранят в LUT1.
Описанный процесс исполняют один раз в начале MRI реологического измерения и повторяют непрерывно во время измерения для того, чтобы компенсировать дрейф и проверять надлежащее функционирование.
Блок управления с обратной связью может представлять собой обособленное устройство или он может представлять собой часть консоли оператора, который тогда нужно расширять посредством дополнительного аппаратного и программного обеспечения.
На фиг. 8-13 проиллюстрировано, как изображения и/или данные навигационного устройства можно использовать для того, чтобы определять по меньшей мере один параметр, характеризующий преобразователь.
На фиг. 8 представлено тестовое изображение 800, 802. Изображение 800 показывает величину изображения 800, а изображение 802 показывает фазу тестового изображения. В этом случае тестовое изображение содержит как величину, так и фазу. Затем это изображение 800, 802 подвергают преобразованию Фурье. 804 показывает величину тестового изображения в k-пространстве и изображение 806 показывает фазу 806 изображения после преобразования Фурье. Можно видеть, что имеет место одно яркое пятно 808, присутствующее на изображении 804 величины в k-пространстве.
На фиг. 9 представлено то же изображение 800 величины, но в этом случае синусоидальную фазу вводили в фазовое изображение 902. Когда осуществляют преобразование Фурье, можно видеть, что фазовое изображение 906 отличается от фазового изображения 806. Конкретной значимостью обладает изменение на изображении 904 величины в k-пространстве. В этом случае можно видеть, что имеет место ряд ярких пятен 908.
На фиг. 10 представлен набор изображений, схожих с теми, что представлены на фиг. 9, за исключением того, что в этом случае фаза тестового изображения 1002 имеет синусоидальную фазу более высокой пространственной частоты. Можно видеть, что изображение 1004, 1006 после преобразования Фурье показывает изменение в фазе 1006 k-пространства относительно фазы k-пространства изображения 906. Также на изображении 1004 величины в k-пространстве можно видеть множество ярких пятен 1008, обладающих конкретной значимостью. Однако яркие пятна 1008 дальше отстоят друг от друга, чем яркие пятна 908. Следовательно, величина пятен в k-пространстве может иметь конкретное применение при определении фазы и амплитуды преобразователя. С возрастанием амплитуды возрастает яркость на изображении величины в k-пространстве. С возрастанием пространственной частоты яркие пятна на изображении величины в k-пространстве 1004 отдаляются. Этот результат может быть особенно полезным, поскольку данные магнитного резонанса получают в k-пространстве. Амплитудой и фазой преобразователя можно управлять без осуществления реконструкции изображения.
На фиг. 11-13 проиллюстрировано, как это можно применять даже посредством получения одной строки в k-пространстве. На фиг. 11 представлено четыре графика. На фиг. 1100 представлен срез изображения 800 и на графике 1102 представлен срез графика 802. Затем график 1100 и 1102 этих значений подвергали преобразованию Фурье. k-пространство по величине нанесено на график на 1104 и фаза нанесена на график на 1106. На графике 1104 величины в k-пространстве можно видеть, что имеет место один большой пик 1108.
На фиг. 12 представлен срез изображения 800 и срез изображения 902, который нанесен на график 1202. Затем эти значения подвергали преобразованию Фурье. Имеет место график 1204 величины и график 1206 фазы. На графике 1204 величины видно минимум три пика 1208.
На фиг. 13 представлен срез изображения 800, который нанесено на фиг. 1100, и срез изображения 1002, который нанесен на график 1302. Затем эти значения подвергали преобразованию Фурье в график 1304 величины в k-пространстве и в график 1306 фазы в k-пространстве. Можно видеть, что на графике 1304 величины снова имеет место множество видимых пиков 1308. Однако расстояние между пиками изменилось. Графики в k-пространстве, представленные на фиг. 11-13, являются репрезентативными для данных, которые получают посредством получения одной строки данных магнитного резонанса. Это иллюстрирует, как можно определять амплитуду и фазу с использованием одной строки данных в k-пространстве. Это является чрезвычайно эффективным способом управления амплитудой и фазой преобразователя, поскольку эти данные получают и интерпретируют чрезвычайно быстро.
Типичные электрические реологические преобразователи при работе двигаются свободно, независимо от их ориентации в поле B0. Когда преобразователь отклоняют относительно оси z, происходит уменьшение амплитуды колебаний, с учетом постоянного тока через устройство.
Авторы настоящего изобретения предлагают встраивать один или несколько датчиков Холла или других полевых зондов для определения поля B0 в положении преобразователя. В случае наклона преобразователя относительно оси z или радиального смещения, выходной сигнал датчиков предоставляет значение для ослабленного поля B0, которое используют для того, чтобы управлять током преобразователя так, чтобы сохранять постоянную амплитуду колебаний. Предусмотрен усовершенствованный поток операций для клинического пользователя, поскольку он получает полезную информацию для правильной фиксации преобразователя.
MR реологию можно осуществлять с использованием преобразователя, состоящего из катушек с компенсацией поля, приводимых в действие низкочастотными токами внутри поля B0. Устройство начинает колебаться с частотой подаваемого тока. Амплитуда колебаний зависит от тока и ориентации устройства относительно внешнего поля. Для заданного тока амплитуду колебаний снижают как только плоскость витков катушки более не параллельна полю B0.
Некоторые варианты осуществления изобретения могут компенсировать эффект наклона преобразователя для определенного количества или постоянного движения преобразователя. В случае установки преобразователя на пациента, например, можно компенсировать эффект наклона преобразователя за счет дыхания.
Один или несколько датчиков магнитного поля можно встраивать в преобразователь так, что значения поля B0 в положении устройства можно измерять в реальном времени. Выходные сигналы датчиков предоставляют средство для регулирования управляющего тока преобразователя так, что амплитуду колебаний можно сохранять постоянной во время движения пациента или преобразователя, а также после изменения положения преобразователя. Для оптимизированного проникновения акустических волн в организм, блок преобразователя может находиться под углом относительно своего корпуса.
На фиг. 14 проиллюстрирован преобразователь 222, который встроен в сборочный узел 1400, содержащий датчики 1402 магнитного поля. Датчики 1402 магнитного поля посылают сигналы 1404 датчика на контроллер 224 преобразователя. Контроллер преобразователя тогда может корректировать фазу и амплитуду преобразователя 222. Контроллер 224 преобразователя также может посылать сигналы на консоль 1406 магнитно-резонансной визуализации.
Для того чтобы предоставлять сигнал об ошибке для тока через преобразователь, полевые зонды помещают на или внутрь корпуса преобразователя (см. фиг. 14). Такие полевые зонды могут представлять датчики Холла или магнитные полевые зонды других типов, например, измерительные контуры.
Датчики осуществляют считывание и в случае нескольких датчиков можно осуществлять объединение сигнала. Также для дальнейшей обработки можно использовать несколько различных измерений поля. Затем измеряемые значения сравнивают или с предварительно определяемым значением для B0 или с калибровочным значением, определяемым предварительно. Простая логика предоставляет сигнал отклонения и подает его на вход источника тока, приводящего преобразователь в действие. Этот входной сигнал можно фильтровать с использованием PID-регулятора (пропорционально-интегрально-дифференциальный). Эта установка показана на фиг. 15.
На фиг. 15 представлен пример контура 1500 с обратной связью, используемого для того, чтобы управлять компоновкой, представленной на фиг. 14. Может иметь место управляющее устройство преобразователя, которое посылает управляющий сигнал 1506 на усилитель 1504 мощности. Управляющее устройство преобразователя и усилитель мощности могут содержать вариант осуществления контроллера 224 преобразователя. Усилитель мощности выдает усиленный управляющий сигнал 1508 на преобразователь в сборочном узле 1400 преобразователя. Полевые датчики в сборочном узле 1400 посылают сигналы 1510 измерения поля на фильтр 1512 комбинации сигналов. Фильтр комбинации сигналов имеет PID-регулятор. Фильтр 1512 комбинации сигналов выводит воздушный сигнал 1514 управляющему устройству преобразователя 1502. Это образует замкнутый контур управления.
На фиг. 15 контур с обратной связью управляет реологическим преобразователем. Типично генератор формы сигналов используют в качестве управляющего устройства преобразователя, которое предоставляет, например, синусоидальный сигнал. Этот сигнал усиливают и подают на преобразователь. Изобретение предполагает добавление полевых зондов на преобразователь. Выходные сигналы этих зондов подают на объединитель/фильтр/регулятор сигналов, и этот блок добавляет сигнал об ошибке после управляющего сигнала для оптимальной эффективности преобразователя и постоянной амплитуды колебаний.
Для того чтобы защищать преобразователь, также задают максимальный ток, предоставляемый источником. Этот механизм не позволяет контуру с обратной связью увеличивать ток до бесконечности, что может разрушить преобразователь.
Расположение преобразователя можно усовершенствовать для клинического пользователя посредством оптической или акустической обратной связи. При условии, что непрерывно осуществляют мониторинг выходных сигналов полевых датчиков, этот сигнал можно использовать для того, чтобы получать положение преобразователя, обеспечивающее максимальную амплитуду колебаний. Указание того, какое положение обеспечивает максимальную амплитуду преобразователя, можно давать посредством оптической визуализации с использованием, например, ряда LED или акустического сигнала.
Расположение преобразователя является критичным и требует опытного и обученного пользователя. Для того чтобы максимизировать амплитуду акустических волн в организме, шарнир между корпусом и генератором колебаний с соединенным поршнем определяет оптимальный угол возбуждения относительно субъекта. Быстрая подготовительная последовательность, которая только частично покрывает центр k-пространства, предоставляет необходимую информацию об обратной связи для выравнивания генератора колебаний. Датчики B0 присоединяют на надлежащем блоке генератора колебаний.
MRI реология основана на вязкоупругой информации и ведет к существенному повышению специфичности диагноза. Авторы настоящего изобретения предлагают динамически менять механическое сопряжение с телом субъекта для того, чтобы делать сопряжение максимальным, и для того, чтобы компенсировать эффекты движения. Смещение поршня изменяют посредством переменной длины и угла наклона, размер и форма поршня также могут быть переменными. Смещением поршня управляют через MRI измерение для того, чтобы получать оптимальную механическую волновую область контакта с телом, которая максимизирует амплитуду волны для индивидуального размера тела пациента.
Из-за вариаций в анатомии между пациентами поток операций значительно усовершенствован, поскольку одно конфигурируемое реологическое устройство может обеспечивать оптимальный результат процедуры. Дискомфорт пациента устранен.
MR реология представляет собой способ визуализации, в котором магнитно-резонансную томографию используют для того, чтобы охарактеризовывать механические свойства ткани. С этой целью ткань приводят в движение, чтобы она совершала механические колебания во время визуализации, что ведет к дополнительному контрасту визуализации. Следовательно, низкочастотные механические волны переносят в ткань и визуализируют с помощью MR последовательности, которая синхронизирована по фазе с механическим возбуждением. Пальпация превратилась в оценку объективного абсолютного физического количества, диагностическое значение можно определять количественно.
Эту информацию можно использовать для того, чтобы различать ткани (здоровая, злокачественная, …) на основе ее вязкоупругих свойств, что ведет к существенному повышению специфичности, например, для диагностики злокачественных опухолей. Предложено и продемонстрировано множество различных преобразователей для использования механических колебаний в ткани, а именно электромагнитные конструкции, которые используют поле B0 внутри MR сканера. Для клинического применения предложены пьезоэлектрические преобразователи или пневматические конструкции.
Колебаний ткани достигают посредством прикрепления генератора механических колебаний к пациенту близко к области визуализации, представляющей интерес. Генератор колебаний может быть основан на электромеханическом преобразователе, таком как приводимая в действие переменным током катушка, совершающая колебания в постоянном магнитном поле B0. Механическое возбуждение ткани генерируют с использованием поршня с фиксированным размером, длиной и положением.
Индивидуальная адаптация к субъекту может обеспечивать оптимальное сопряжение и, таким образом, хорошую передачу механических волн в тело для оптимальной реконструкции, которая является обязательной.
В наши дни величину колебаний корректируют вручную на основе опыта, например, задавая электрический ток через катушку указанного электромеханического генератора колебаний. Проблемы, на которые могут быть направлены некоторые варианты осуществления изобретения:
Механическое соответствие организму пациента является субоптимальным для жесткой установки преобразователя
Не предусмотрена индивидуальная адаптация к телам пациентов различных размеров
Не возможна адаптация к локальным границам ткани
В обычных конструкциях компенсация движения и дыхания отсутствует
Отсутствует управление вибрацией на максимальном уровне
Не гарантирован комфорт пациента
Смещением поршня реологического генератора колебаний управляют через MRI измерение, и этим гарантируют оптимальное сопряжение механических волн с телом, обеспечивая оптимальную амплитуду волны для индивидуального размера тела пациента, и обеспечивают эффективную помощь при расположении.
Различные параметры можно менять/адаптировать электромеханически, например, длину поршня, угол наклона или диаметр поверхности контакта поршня. В частности, для различных размеров пациентов и, таким образом, изменяющегося распределения жира в теле можно адаптировать настройки реологического блока для достижения хороших результатов визуализации. Механизм автоматической настройки на основе данных визуализации и мониторинг данных генератора колебаний повышает ее эффективность. Вибрация на максимальном уровне исключена, что предотвращает дискомфорт пациента.
Некоторые варианты осуществления изобретения объединяют средства в реологическом преобразователе, который предусматривает внешнюю вариацию параметров устройства, таких как длина поршня (смещение), угол наклона поршня относительна корпуса генератора колебаний и поверхность контакта поршня с организмом пациента.
На фиг. 16 проиллюстрирован преобразователь 1600 согласно одному из вариантов осуществления изобретения. В этом варианте осуществления поршень 1602 имеет переменную длину. Поршень соединяет генератор 1604 колебаний с поверхностью 1608 контакта. Поверхность 1608 контакта пригодна для того, чтобы находиться в контакте с поверхностью субъекта и передавать вибрации на субъект. Присутствует привод 1606, который делает возможным изменение длины поршня 1602. Это ведет к переменному расстоянию 1610.
На фиг. 17 представлен альтернативная конструкция 1700 преобразователя. В этом примере поверхность 1608 контакта наклоняют относительно остального преобразователя 1700. Поверхность 1608 контакта соединяют через поршень 1702 с генератором 1604 колебаний. Присутствует привод 1706, который пригоден для вращения поршня 1702. Таким образом, угол контакта 1608 можно поворачивать в направлении 1710. Посредством его вращения можно изменять угол между поверхностью 1608 контакта и субъектом.
На фиг. 18 представлен альтернативный вариант осуществления преобразователя 1800 согласно одному из вариантов осуществления изобретения. Этот вариант осуществления схож с другими, за исключением того, что в этом случае поршень 1802 фиксирован. Поршень передает колебания между генератором 1604 колебаний и поверхностью 1608 контакта. В этом случае поверхность 1608 контакта имеет непостоянную площадь поверхности. Например, поверхность 1608 контакта можно конструировать из двух или более пластин и приводной механизм 1806 можно использовать для того, чтобы управлять расстоянием между пластинами.
На фиг. 19 представлен дополнительный вариант осуществления преобразователя 1900 в соответствии с изобретением. В этом варианте осуществления присутствует надувная область 1902, установленная на поршень 1802. Привод 1906 способен надувать или сдувать надувную область 1902, тем самым составляя угрозу в форме поверхности 1608 контакта.
На фиг. с 16 до 19 представлены различные параметры поршня, которые можно изменять удаленно во время реологического сеанса для усовершенствованного результата. Реологический аппликатор в качестве центрального элемента приводят в действие посредством усилителя звуковых частот (здесь: пример катушки, приводимой в действие переменным током). Входной сигнал усилителя и входной сигнал смещения вычисляют на основе набора значений, получаемых посредством MRI измерений:
Непосредственная связь между MR консолью и интерфейсом и управлением движением смещения делает возможной синхронизацию визуализирующих последовательностей и применения набора параметров механических колебаний. Кроме того, данные в реальном времени для MRI визуализирующей последовательности используют на входе для управления с обратной связью с тем, чтобы включать генератор колебаний с динамическим поршнем только когда необходимо. Автоматическую калибровку контура с обратной связью и предварительно заданные данные для различных субъектов (масса, жир, данные визуализации, база данных) реализуют в программном обеспечении, которое управляет контуром. Описанный процесс исполняют один раз в начале MRI реологического измерения и повторяют непрерывно во время измерения для того, чтобы компенсировать различное механическое соответствие во время движения и перемещения пациента.
На фиг. 20 представлен один из примеров того, как реализовать такое устройство. Поршень прочно прикрепляют к генератору колебаний через винтовое соединение. Витков/пространства больше, чем необходимо для механической фиксации. Поворачивая поршень, можно корректировать расстояние до генератора колебаний и поршня (пациента). Для этого поршень имеет вертикальное цевочное колесе, где расстояние - привод прикрепляют с использованием соответствующего второго цевочного колеса. Посредством выполнения только части оборота можно менять угол поршня.
На фиг. 20 представлена одна реализация варианта осуществления, представленного на фиг. 17. На фиг. 20 представлен преобразователь 1700. В корпусе 2000 присутствует генератор колебаний, который имеет витки 2002, установленную внутри него. Привод 1706 приводит в движение шестерни 2004. Приведение шестерней 2004 в действие заставляет поршень 1702 вращаться в витках 2002. Это вызывает перемещение поршня 1702 в корпус 2000 генератора колебаний или из него. В этом примере поверхность 1608 контакта наклоняют под углом. По мере того как привод 1706 вращает шестерни 2004, поверхность 1608 контакта будет вращаться вокруг центра оси витков, а также поршень 1706 будет менять свое расстояние.
На фиг. 21 представлена усовершенствованная версия варианта осуществления, представленного на фиг. 20. На фиг. 21 представлен преобразователь 2100. В этом случае добавлен второй привод 2102. Привод 2102 вращает шестерни 2104. Это заставляет поршень 1702 вращаться в резьбе или витках 2104. Привод 1706 заставляет вращаться шестерни 2004, которые устанавливают для вращения полого винта 2106. Витки 2104 или резьбу устанавливают между поршнем 1706 и полым винтом 2106. Посредством управления приводами 1706 и 2102 можно управлять как смещением поршня 1706, так и углом, на который поворачивают поверхность 1708.
На фиг. 21 представлено, как можно объединять обе функции. Винт, приводимый в движение первым приводом, является полым и оборудован внутренними витками. Эти витки удерживают поршень. На нижнем конце сам поршень имеет второе вертикальное цевочное колесо. Приведение его в движение с помощью второго привода меняет угол поршня. Приведение обоих приводов в движение одновременно (в различных направлениях с одинаковой угловой скоростью) изменяет высоту при условии, что один оборудован грубой резьбой, и один оборудован мелкой резьбой.
На фиг. 21 представлены различные возможности модифицированного сопряжения поршня с телом: смещение в длину, наклон поршня относительно корпуса преобразователя, переменная поверхность контакта с телом.
Привод для смещения поршня можно реализовать посредством пневматических устройств, пьезодвигателя или троса Боудена, передающего усилие, создаваемое за пределами MR сканера, на смещающий механизм. Связь между преобразователем и MRI системой осуществляют с использованием, например, оптической или беспроводной технологии.
На фиг. 22 представлен пример контура 2200 управления для автоматического конфигурирования эффективности преобразователя 222. Например, магнитно-резонансное сканирование 2202 можно использовать в качестве входного сигнала в контроллер 224 преобразователя. В этом примере контроллер 224 преобразователя содержит аналогово-цифровое преобразование и логический блок 2203, который предоставляет команды звуковому усилителю 2205. Контроллер 2203 также предоставляет сигнал преобразователю 222, содержащий какую-либо из возможных корректировок, представленных в вариантах осуществления на фиг. 16-21. Реологический преобразователь 222 также может обеспечивать непосредственную обратную связь с контроллером 2203. Например, если длина поршня является корректируемой, преобразователь может предоставлять данные кодировщика, характеризующие длину 2204 поршня. Если угол поршня является корректируемым, преобразователь 222 может предоставлять данные кодировщика, характеризующие угол 2206 поршня. Если преобразователь способен изменять площадь поверхности у поверхности контакта или диаметр поршня, преобразователь 222 может предоставлять данные кодировщика, характеризующие площадь поверхности контакта 2208. Если преобразователь имеет корректируемый размер поршня, преобразователь 222 может обеспечивать обратную связь с контроллером 2203 для передачи данных кодировщика, характеризующих размер 2210 поршня.
Фиг. 22: схематически показано, как реологический преобразователь автоматически конфигурируют для оптимальной эффективности. Преобразователь оборудован кодировщиками, которые могут доставлять данные о длине, угле наклона, диаметре или размере поршня. Эти данные подают в логический блок (аппаратное или программное обеспечение), который также получает результат реологического тестового сканирования (предварительного сканирования). В зависимости от качества сканирования корректируют параметры и/или управляющую мощность для преобразователя. Другое сканирование верифицирует результат. Контур можно запускать до исследования или даже чередовать с исследованием, всегда предоставляя наилучший возможный результат. Дискомфорт пациента устранен.
Хотя изобретение иллюстрировано и описано подробно на чертежах и в приведенном выше описании, такие иллюстрации и описание следует рассматривать как иллюстративные или образцовые и не ограничивающие; изобретение не ограничено раскрытыми вариантами осуществления.
Другие вариации раскрытых вариантов осуществления могут понять и выполнять специалисты в данной области при практическом осуществлении описываемого в заявке изобретения, изучив чертежи, раскрытие и приложенную формулу изобретения. В формуле изобретения слово «содержит» не исключает другие элементы или стадии, а формы единственного числа не исключают множественного. Один процессор или другой блок может выполнять функции нескольких элементов, перечисленных в формуле изобретения. Сам факт того, что определенные средства перечислены во взаимно различных зависимых пунктах формулы изобретения, не указывает на то, что комбинация этих мер не может быть использована с пользой. Компьютерную программу можно хранить/распространять в подходящем носителе, таком как оптическая запоминающий носитель или твердотельный носитель, поставляемый вместе с или в качестве части другого аппаратного обеспечения, а также можно распространять в других формах, например, через интернет или другие проводные или беспроводные телекоммуникационные системы. Любые ссылочные позиции в формуле изобретения не следует толковать в качестве ограничения объема.
СПИСОК ССЫЛОЧНЫХ ОБОЗНАЧЕНИЙ
200 медицинский инструмент
202 система магнитно-резонансной визуализации
204 магнит
206 канал магнита
208 зона визуализации
210 катушки градиентного магнитного поля
212 источник питания катушек градиентного магнитного поля
214 радиочастотная катушка
216 приемопередатчик
218 субъект
220 опора субъекта
222 преобразователь
224 контроллер преобразователя
226 направление вибраций
228 первая область, представляющая интерес
230 вторая область, представляющая интерес
232 компьютерная система
234 аппаратный интерфейс
236 процессор
238 пользовательский интерфейс
240 компьютерный накопитель
242 компьютерная память
250 первая импульсная последовательность с пространственным кодированием
252 данные магнитного резонанса
254 вторая импульсная последовательность с пространственным кодированием
256 данные навигационного устройства
258 профиль навигационного устройства
260 параметр
262 магнитно-резонансное реологическое изображение
264 управляющий модуль
266 модуль конструирования профилей навигационного устройства
268 модуль вычисления параметров
270 модуль реконструирования реологических изображений
400 медицинский инструмент
402 датчик вибрации
404 данные датчика
500 медицинский инструмент
502 реологический аппликатор
504 управляющий сигнал и измерительные линии
600 контур управления с обратной связью
602 контроллер с обратной связью
604 задающий сигнал
606 усилитель
608 усиленная обратная связь
610 реологический аппликатор/преобразователь
612 опосредованная обратная связь на преобразователе
614 непосредственная обратная связь на преобразователе
616 датчик вибрации
618 обратная связь датчика вибрации
620 обратная связь реконструкции изображений
622 обратная связь MR консоли
700 оператор
702 сигнал оператору
704 управляющая логика
706 блок сравнения
708 поисковая таблица 2
710 цифро-аналоговый преобразователь
712 аналогово-цифровой преобразователь
714 поисковая таблица 1
716 переключатель
800 величина на тестовом изображении
802 фаза на тестовом изображении
804 величина в k-пространстве
806 фаза в k-пространстве
808 одно яркое пятно
902 фаза на тестовом изображении
904 величина в k-пространстве
906 фаза в k-пространстве
908 множество ярких пятен
1002 фаза на тестовом изображении
1004 величина в k-пространстве
1006 фаза в k-пространстве
1008 множество ярких пятен
1100 срез изображения 800
1102 срез изображения 802
1104 величина в k-пространстве
1106 фаза в k-пространстве
1108 пик
1202 срез изображения 902
1204 величина в k-пространстве
1206 фаза в k-пространстве
1208 множество пиков
1302 срез изображения 1002
1304 величина в k-пространстве
1306 фаза в k-пространстве
1308 множество пиков
1400 сборочный узел
1402 датчики магнитного поля
1404 сигнал датчика
1406 MRI консоль
1500 контур с обратной связью
1502 управляющее устройство преобразователя
1504 усилитель мощности
1506 управляющий сигнал
1508 усиленный управляющий сигнал
1510 сигналы измерения поля
1512 фильтр комбинации сигналов
1514 сигнал об ошибке
1600 преобразователь
1602 поршень
1604 генератор колебаний
1606 привод
1608 поверхность контакта
1610 переменное расстояние
1700 преобразователь
1702 поршень
1706 привод
1800 преобразователь
1802 поршень
1806 привод
1810 направление расширения
1900 преобразователь
1902 надувная область
1906 привод
2000 генератор колебаний и корпус
2002 витки
2004 шестерни
2100 преобразователь
2102 привод
2104 витки
2106 полый винт
2200 контур управления
2202 магнитно-резонансное сканирование
2203 аналогово-цифровой преобразователь и логический контроллер
2204 данные кодировщика: длина поршня
2205 звуковой усилитель
2206 данные кодировщика: угол поршня
2208 данные кодировщика: диаметр поршня
2210 данные кодировщика: размер поршня
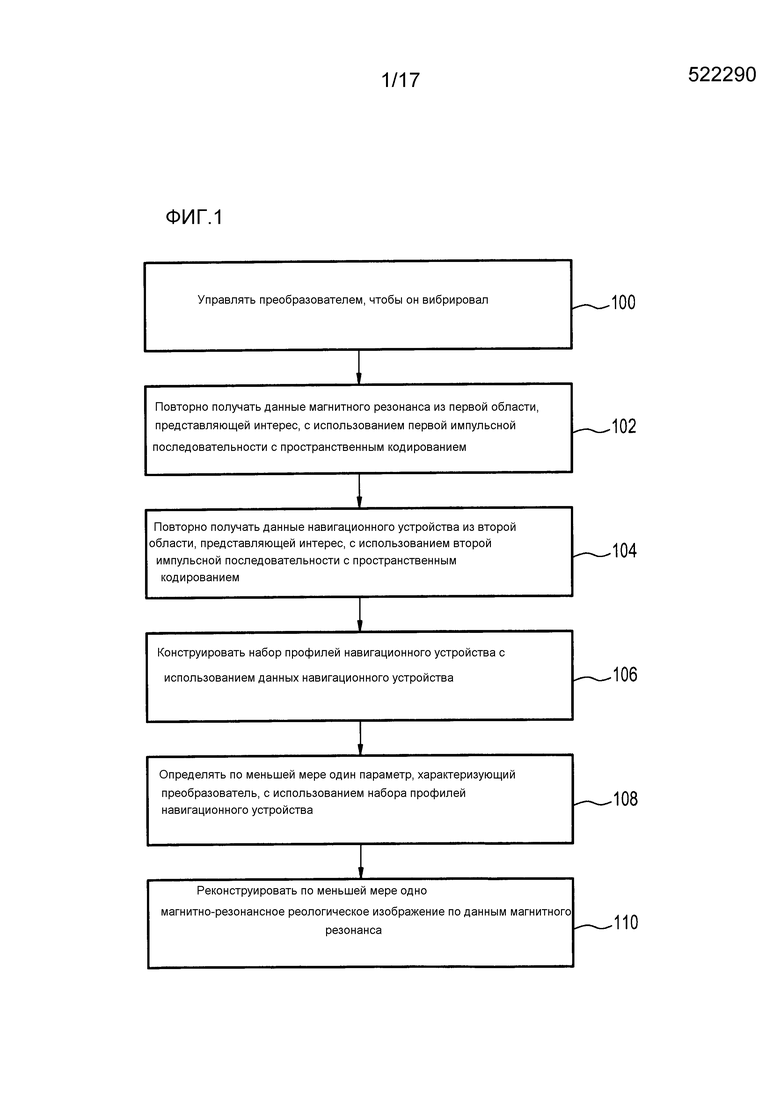

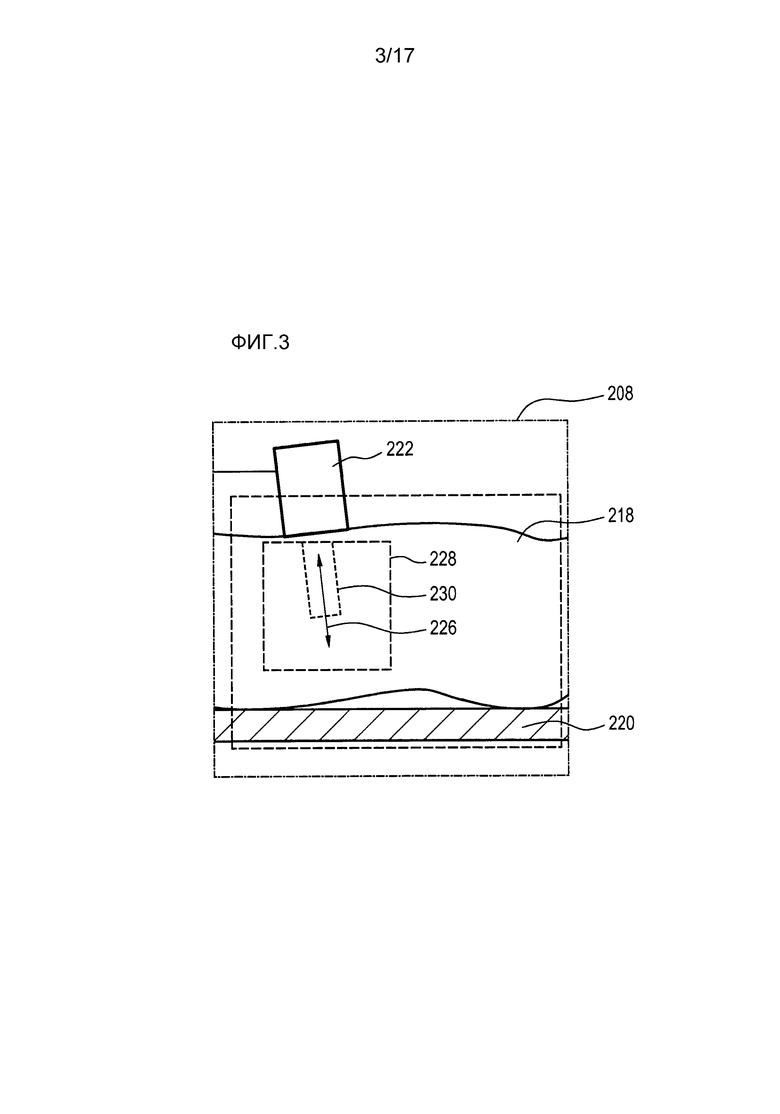

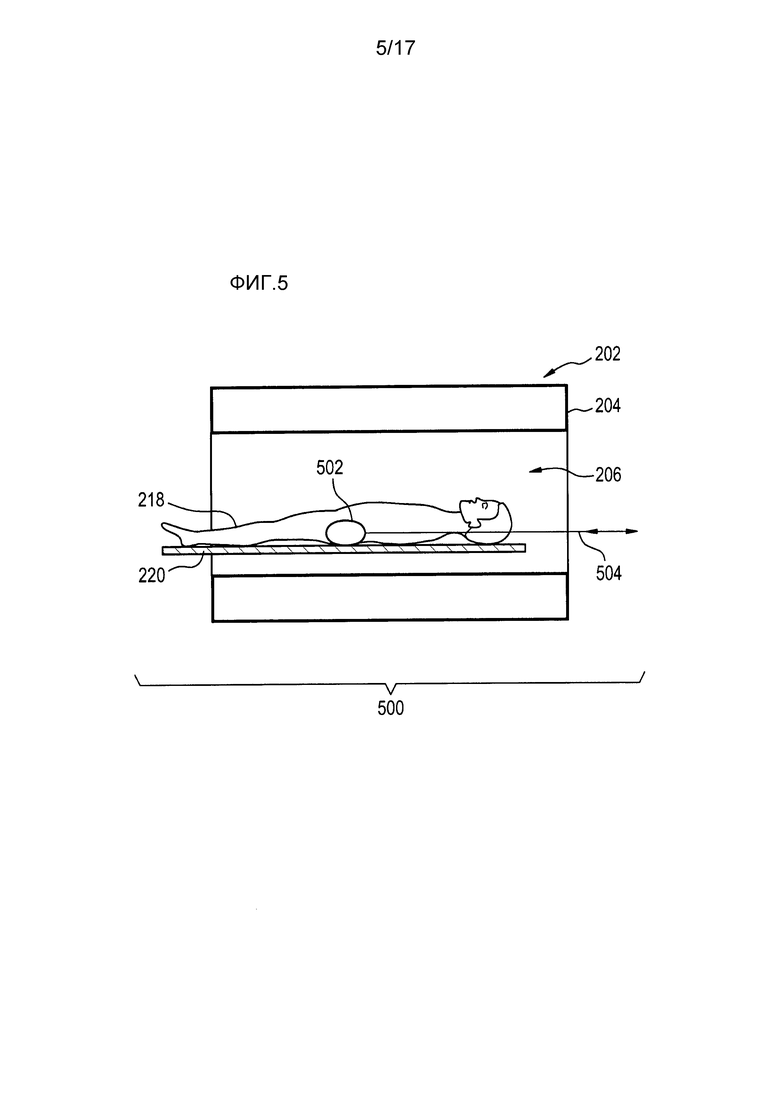

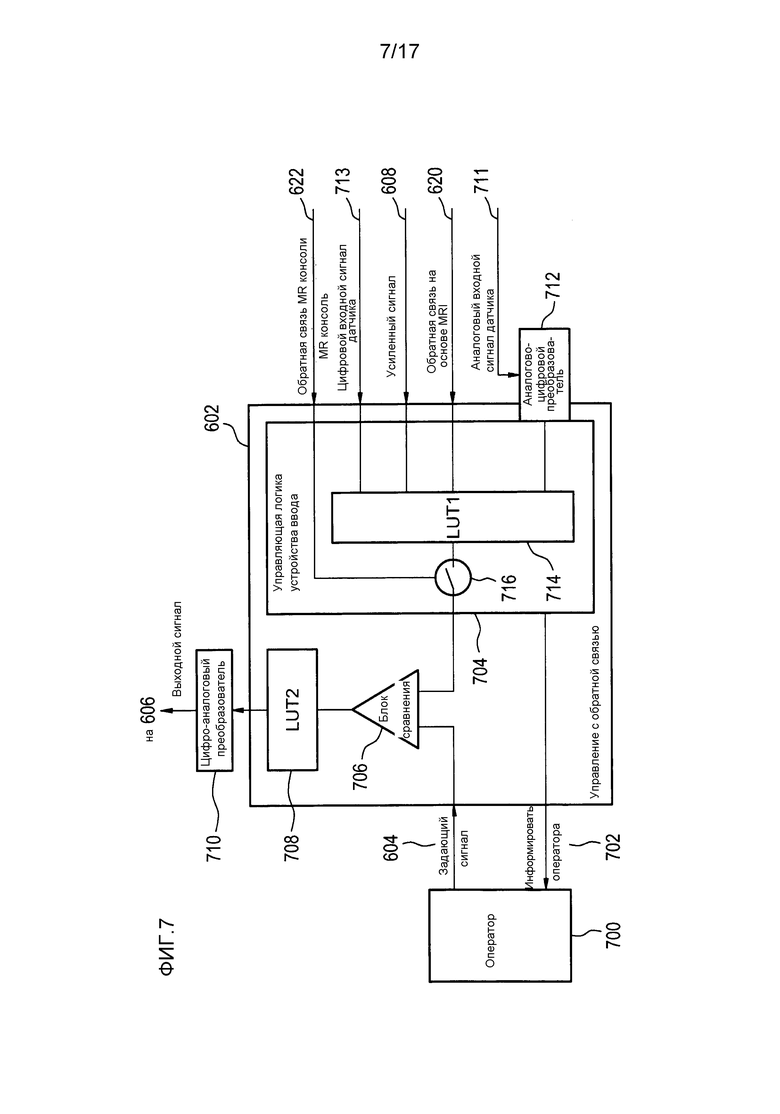


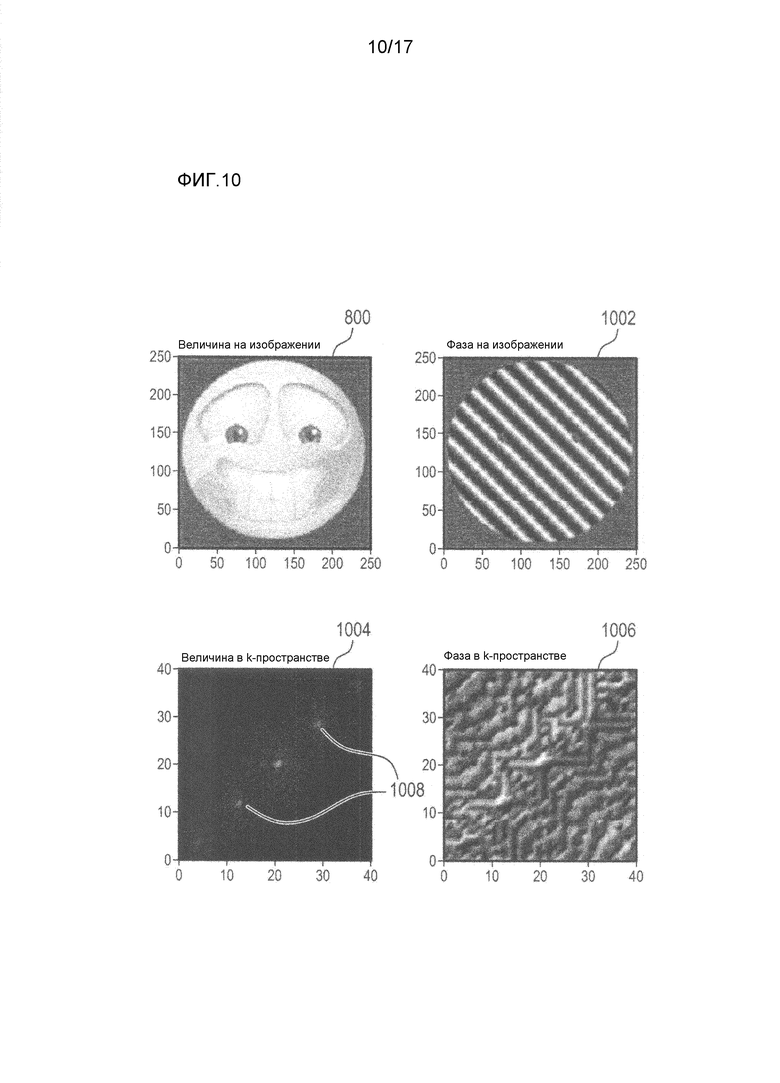
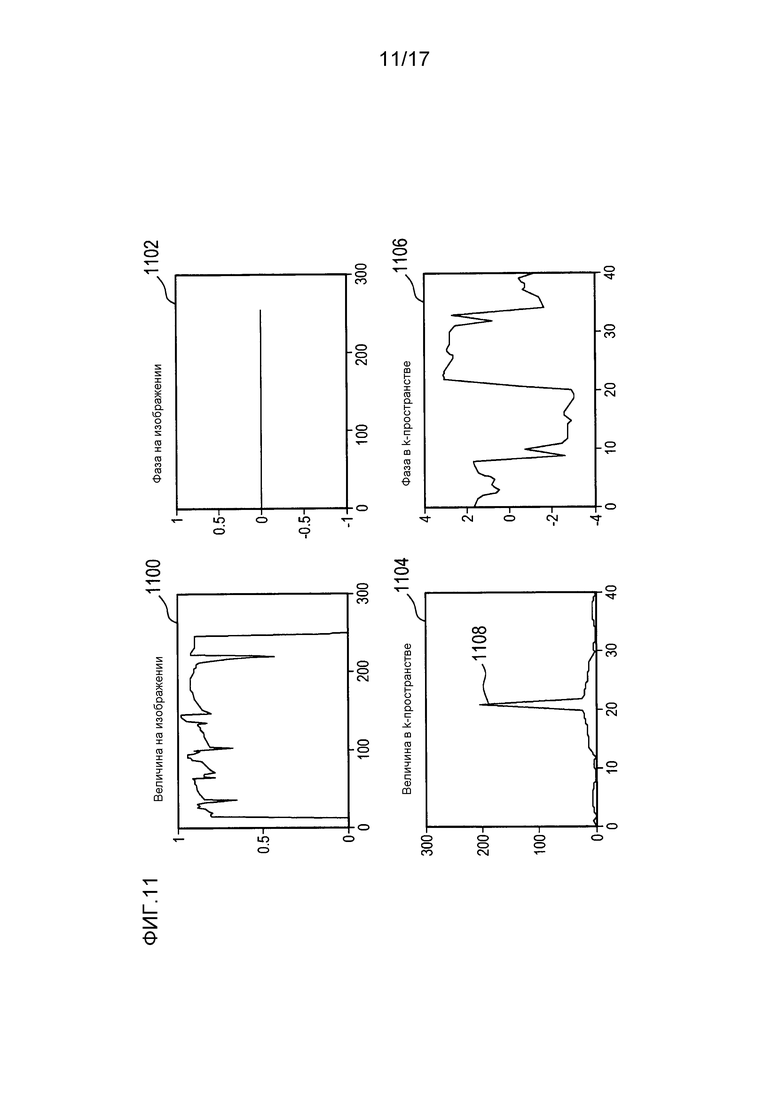
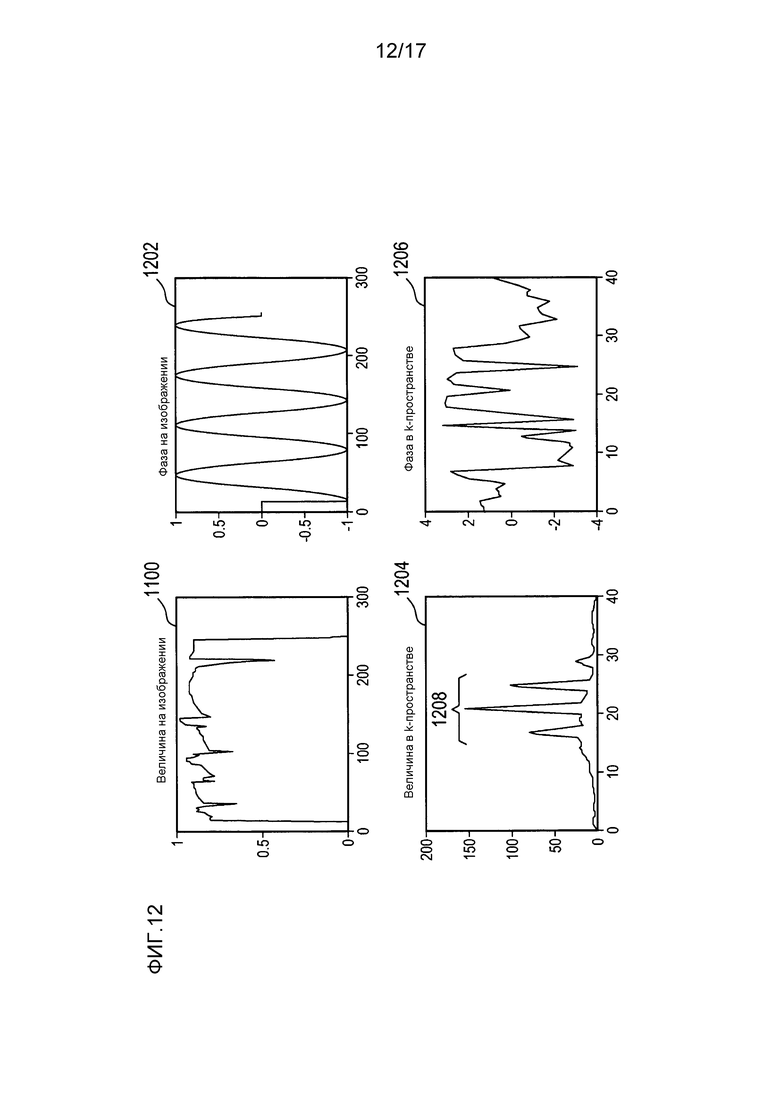


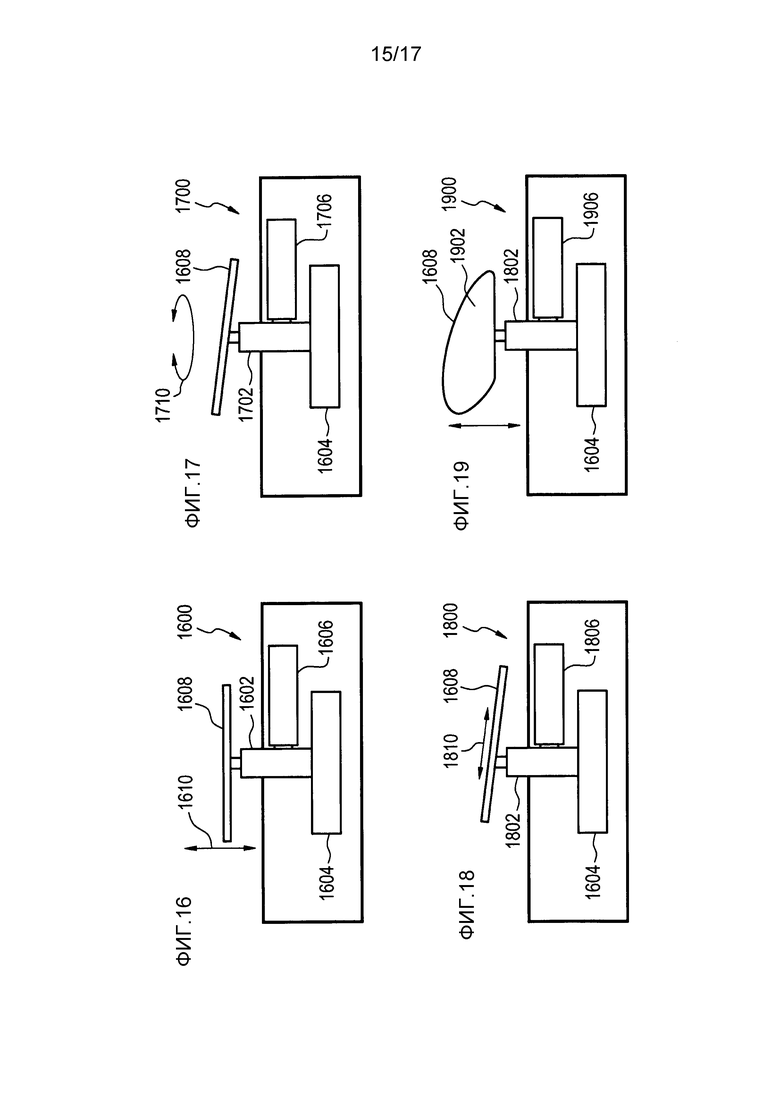

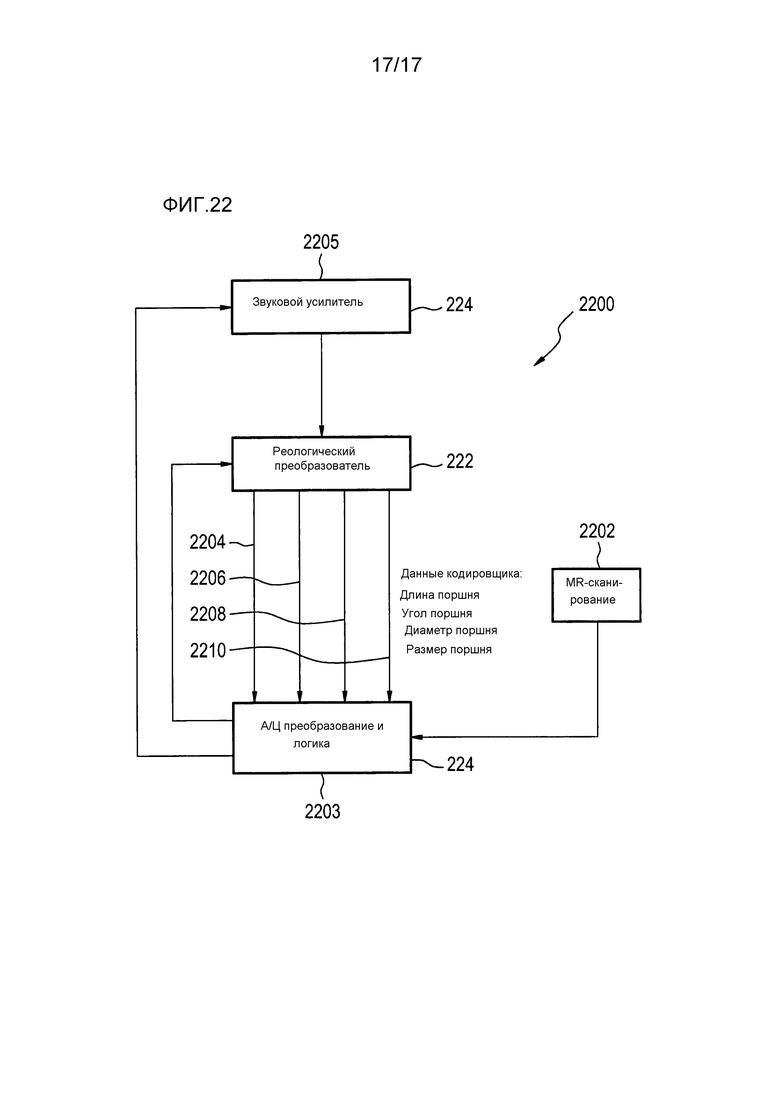
Использование: для визуализации тканей посредством магнитно-резонансной реологии. Сущность изобретения заключается в том, что медицинский инструмент содержит систему магнитно-резонансной визуализации, преобразователь для осуществления механических вибраций по меньшей мере части субъекта в пределах зоны визуализации. Инструкции побуждают процессор, управляющий медицинским инструментом: управлять преобразователем, чтобы он вибрировал; управлять системой магнитно-резонансной визуализации для того, чтобы повторно получать данные магнитного резонанса с использованием первой импульсной последовательности с пространственным кодированием; управлять системой магнитно-резонансной визуализации для того, чтобы получать данные навигационного устройства с использованием второй импульсной последовательности с пространственным кодированием; конструировать набор профилей навигационного устройства с использованием данных навигационного устройства; определять по меньшей мере один параметр, характеризующий вибрации преобразователя, с использованием набора профилей навигационного устройства; и реконструировать по меньшей мере одно магнитно-резонансное реологическое изображение по данным магнитного резонанса. Технический результат: обеспечение возможности достоверной визуализации тканей. 2 н. и 13 з.п. ф-лы, 22 ил.
1. Медицинский инструмент, содержащий:
систему магнитно-резонансной визуализации для получения данных магнитного резонанса от субъекта по меньшей мере частично в пределах зоны визуализации;
преобразователь для осуществления механических вибраций по меньшей мере в части субъекта в пределах зоны визуализации;
контроллер преобразователя для управления амплитудой и фазой вибраций преобразователя;
процессор для управления медицинским инструментом;
память для хранения машиноисполняемых инструкций для исполнения процессором, причем исполнение инструкций побуждает процессор:
управлять преобразователем, чтобы он вибрировал;
управлять системой магнитно-резонансной визуализации для того, чтобы повторно получать данные магнитного резонанса из первой области, представляющей интерес, с использованием первой импульсной последовательности с пространственным кодированием во время вибрации преобразователя;
управлять системой магнитно-резонансной визуализации для того, чтобы получать данные навигационного устройства из второй области, представляющей интерес, с использованием второй импульсной последовательности с пространственным кодированием, причем исполнение инструкций обеспечивает чередование получения данных магнитного резонанса с получением данных навигационного устройства;
конструировать набор профилей навигационного устройства с использованием данных навигационного устройства;
определять по меньшей мере один параметр, характеризующий вибрации преобразователя, с использованием набора профилей навигационного устройства; и
реконструировать по меньшей мере одно магнитно-резонансное реологическое изображение по данным магнитного резонанса.
2. Медицинский инструмент по п. 1, в котором исполнение инструкций дополнительно побуждает процессор обнаруживать периодические вариации контраста в наборе профилей навигационного устройства, причем исполнение инструкций дополнительно побуждает процессор определять по меньшей мере один параметр по меньшей мере частично посредством осуществления любого одного из следующего: определения амплитуды преобразователя с использованием периодических вариаций контраста, определения фазы преобразователя посредством определения расстояния между периодическими вариациями контраста и их сочетания.
3. Медицинский инструмент по п. 1, причем медицинский инструмент дополнительно содержит устройство отображения, при этом исполнение инструкций дополнительно побуждает процессор:
отображать по меньшей мере один параметр на устройстве отображения во время получения данных магнитного резонанса;
отображать объект пользовательского интерфейса на устройстве отображения;
принимать команду корректировки преобразователя от объекта пользовательского интерфейса;
генерировать управляющую команду модификации вибрации с использованием команды корректировки преобразователя; и
корректировать вибрацию преобразователя с использованием контроллера преобразователя и управления модификацией вибрации.
4. Медицинский инструмент по п. 1, причем медицинский инструмент дополнительно содержит датчик вибрации для получения данных датчика, при этом исполнение инструкций дополнительно побуждает процессор получать данные датчика во время вибрации преобразователя, причем по меньшей мере один параметр частично определен с использованием данных датчика.
5. Медицинский инструмент по п. 4, в котором датчик вибрации выполнен с возможностью любого одного из следующего: установки на преобразователе и установки на поверхности субъекта.
6. Медицинский инструмент по п. 4, в котором датчик вибрации представляет собой любое одно из следующего: датчик ускорения, тензодатчик, датчик давления, пьезоэлектрический преобразователь, микрофон и их сочетания.
7. Медицинский инструмент по п. 1, в котором преобразователь содержит по меньшей мере один магнитный датчик для измерения данных магнитного датчика, причем исполнение инструкций дополнительно содержит определение по меньшей мере одного параметра по меньшей мере частично с использованием данных магнитного датчика.
8. Медицинский инструмент по п. 7, в котором система магнитно-резонансной визуализации содержит основной магнит, причем основной магнит выполнен с возможностью генерации магнитного поля В0, при этом определение по меньшей мере одного параметра по меньшей мере частично с использованием данных магнитного датчика содержит определение ориентации преобразователя относительно поля В0.
9. Медицинский инструмент по п. 7, в котором система магнитно-резонансной визуализации дополнительно содержит устройство отображения для выравнивания, причем исполнение инструкций дополнительно побуждает процессор отображать ориентацию датчика относительно поля В0 на устройстве отображения для выравнивания во время получения данных магнитного резонанса.
10. Медицинский инструмент по п. 1, причем медицинский инструмент дополнительно содержит корректируемый поршень, при этом корректируемый поршень содержит поверхность контакта, и корректируемый поршень выполнен с возможностью передачи вибраций между преобразователем и поверхностью контакта, причем корректируемый поршень выполнен управляемым с помощью процессора, при этом исполнение инструкций побуждает процессор регулировать корректируемый поршень в соответствии с по меньшей мере одним параметром.
11. Медицинский инструмент по п. 10, в котором поверхность контакта пригодна для надувания и сдувания, причем процессор выполнен с возможностью управления надуванием и сдуванием поверхности контакта, причем эту поверхность контакта можно формировать в виде поверхности надувной головки преобразователя или кончика преобразователя.
12. Медицинский инструмент по п. 10, в котором корректируемый поршень выполнен с возможностью регулирования расстояния между преобразователем и поверхностью контакта, причем процессор выполнен с возможностью управления расстоянием между преобразователем и поверхностью контакта.
13. Медицинский инструмент по п. 10, в котором поверхность контакта пригодна для регулирования угла между корректируемым поршнем и поверхностью контакта, причем процессор выполнен с возможностью управления углом между преобразователем и поверхностью контакта.
14. Медицинский инструмент по п. 10, в котором поверхность контакта имеет корректируемую площадь поверхности, причем процессор выполнен с возможностью управления корректируемой площадью поверхности.
15. Машиночитаемый носитель, хранящий компьютерную программу, содержащую машиноисполняемые инструкции для исполнения с помощью процессора, управляющего медицинским инструментом, причем медицинский инструмент содержит систему магнитно-резонансной визуализации для получения данных магнитного резонанса от субъекта по меньшей мере частично в пределах зоны визуализации, причем медицинский инструмент дополнительно содержит преобразователь для осуществления механических вибраций по меньшей мере в части субъекта в пределах зоны визуализации, при этом медицинский инструмент дополнительно содержит контроллер преобразователя для управления амплитудой и фазой вибраций преобразователя, причем исполнение инструкций побуждает процессор:
управлять преобразователем, чтобы он вибрировал;
управлять системой магнитно-резонансной визуализации для того, чтобы повторно получать данные магнитного резонанса из первой области, представляющей интерес, с использованием первой импульсной последовательности с пространственным кодированием во время вибрации преобразователя;
управлять системой магнитно-резонансной визуализации для того, чтобы получать данные навигационного устройства из второй области, представляющей интерес, с использованием второй импульсной последовательности с пространственным кодированием, причем исполнение инструкций обеспечивает чередование получения данных магнитного резонанса с получением данных навигационного устройства;
конструировать набор профилей навигационного устройства с использованием данных навигационного устройства;
определять по меньшей мере один параметр, характеризующий вибрации преобразователя, с использованием набора профилей навигационного устройства; и
реконструировать по меньшей мере одно магнитно-резонансное реологическое изображение по данным магнитного резонанса.
| US 20120010497 A1, 12.01.2012 | |||
| US 20110025333 A1, 03.02.2011 | |||
| US 20060264736 A1, 23.11.2006 | |||
| US 20110112393 A1, 12.05.2011 | |||
| СИСТЕМА И СПОСОБ РАЗМЕЩЕНИЯ СТАТИЧЕСКИХ ОБЪЕКТОВ ДАННЫХ В НЕОДНОРОДНОЙ ОПЕРАТИВНОЙ ПАМЯТИ | 2009 |
|
RU2422883C1 |
| МАГНИТНО-РЕЗОНАНСНОЕ УСТРОЙСТВО И СПОСОБ | 2006 |
|
RU2411528C2 |

