Изобретение относится к геофизическим исследованиям, в частности к способам акустического каротажа.
Акустический каротаж является одним из способов, которые реализуются на практике для акустического исследования скважин. При акустическом каротаже в скважине с помощью акустического источника возбуждаются упругие колебания, которые распространяются в скважинной жидкости и окружающих скважину горных породах и фиксируются приемниками акустических волн, которые расположены в той же скважине. Как правило, акустический каротаж осуществляется с помощью использования скважинных акустических каротажных приборов, которые позволяют измерить время пробега основных типов волн по горной породе от источника к набору приемников. Результаты таких измерений позволяют создать геоакустические модели разрезов скважин для интерпретации данных сейсморазведки, определить упругие модули горных пород, провести оценку пористости пород и т.д. Качество акустических измерений при проведении каротажа в реальных полевых условиях зависит от многих факторов - расположения каротажного прибора в скважине, формы ствола скважины, типа источника сигнала и т.д. Расположение прибора в скважине особенно важно для приборов с направленным сигналом источника, т.е. источника, у которого можно четко выделить направления испускания сигнала в соответствии с диаграммой направленности источника, где под диаграммой направленности источника акустических волн по полю давления (применительно к источникам в жидких средах, т.е. тех средах, которые присутствуют в скважинах) следует понимать зависимость амплитуды давления, создаваемого источником, от угловых координат и точки наблюдения в горизонтальной и/или вертикальной плоскости. К таким источникам, например, относятся дипольный или квадрупольный источники акустических волн.
Кроме того, могут возникнуть проблемы и в случаях расположения прибора в нецилиндрической скважине. Для нецилиндрических скважин характеристики дисперсионных кривых (зависимость скорости распространения акустических волн от частоты волнового процесса), получаемых при анализе измеряемых в скважине акустических полей, зависят от характеристик источника и в особенности от диаграммы направленности источника сигнала в случае направленного источника (так как при определенных условиях в скважине не удается возбудить полный спектр колебаний). В ряде случаев комбинация геометрических особенностей формы скважины с неудачным направлением сигнала от направленного источника может привести к неудовлетворительному качеству измеряемых акустических данных.
В целях избежать наличие эксцентриситета прибора (децентрализация прибора относительно оси скважины) в скважине обычно применяют специальные устройства для центрирования внутрискважинного оборудования - различные типы центраторов (см., например, Будыко Л.В. О центрировании каротажных приборов в необсаженной скважине // НТВ "Каротажник". Тверь. Изд. АИС. 2002. Вып. 95. С. 2638). Но в некоторых случаях (например, в случаях наличия в стволе скважины каверн разной формы и размера или ее изгиба) центраторы не вполне эффективны и эксцентриситет акустического прибора значителен. В этом случае качество акустических данных, получаемых от прибора, значительно ухудшается. При эксцентриситете прибора, например, возникающего из-за отсутствия или неисправности центраторов или большого угла наклона скважины, когда прибор под своим весом сжимает рессоры центратора, наблюдается образование двугорбых волн, выявляемых при анализе данных. Это влечет за собой неправильный расчет интервального времени вследствие того, что при поиске максимума волны регистрирующая система выбирает разные локальные экстремумы (Стенин А.В. Комплексная технология обработки и интерпретации данных многоканальных акустических систем при исследовании нефтяных и газовых скважин. // Автореферат диссертации на соискание ученой степени кандидата технических наук. УДК 550.83.05, Москва, 2009). Другая проблема возникает с точностью построения на основе полученных данных дисперсионных кривых, что особенно выражается в области средних и высоких частот (от ~1000 Hz) для быстрых горных пород. Под дисперсионными кривыми здесь понимается зависимость фазовой и групповой скоростей нормальных волн от частоты волнового процесса (смотрите H.D. Leslie, C.J. Randall Eccentric dipole sources in fluid-filled boreholes: Numerical and experimental results. // Journal of the Acoustical Society of America 87(6):2405 (1990) и Joongmoo Byun, M. Nafi Toksöz Effects of an off-centered tool on dipole and quadrupole logging. // GEOPHYSICS, VOL. 71, NO. 4 JULY-AUGUST 2006; P. F91-F100.).
Технический результат, достигаемый при реализации изобретения, заключается в повышении качества получаемых в процессе каротажа акустических данных при проведении акустического каротажа в случаях значительного эксцентриситета прибора в скважине и/или в случае скважин с нецилиндрической формой поперечного сечения за счет корректировки направления испускания сигнала направленным источником.
В соответствии с предлагаемым способом в скважине размещают с возможностью перемещения акустический каротажный прибор, содержащий по меньшей мере один источник направленных акустических сигналов и по меньшей мере один приемник акустических сигналов. На каждом шаге акустического каротажа перед проведением измерений определяют положение прибора в скважине и/или форму скважины. Определяют необходимое направление для испускания направленного сигнала и вычисляют угол поворота источника сигнала вокруг оси прибора для обеспечения этого направления. Осуществляют поворот источника на вычисленный угол и осуществляют акустические измерения.
Положение акустического каротажного прибора в скважине может быть определено на основе измерений датчиков. В качестве таких датчиков могут выступать, например, ультразвуковые датчики или оптоэлектронные датчики, позволяющие определить расстояние от корпуса прибора до стенок скважины.
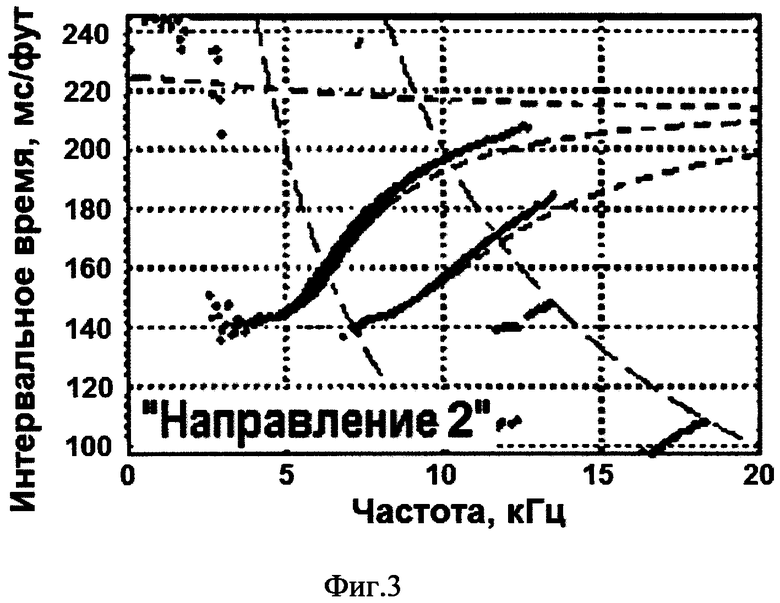
Изобретение поясняется чертежами, где на фиг. 1 показана скважина в горной породе с расположенным в ней акустическим каротажным прибором, смещенным от центра скважины, на фиг. 2 приведены дисперсионные кривые в случае дипольного источника акустических волн с направлением диаграммы направленности "Направление 1", на фиг. 3 приведены дисперсионные кривые в случае дипольного источника акустических волн с направлением диаграммы направленности "Направление 2".
Поворот направленного источника сигнала вокруг главной оси акустического прибора на определенный угол позволяет обеспечить наобходимое направление испускания акустического сигнала как для случаев со значительным эксцентриситетом акустического прибора в скважине, так и для не цилиндрических скважин, или при комбинации обоих особенностей.
Под нецилиндрическими скважинами подразумеваются скважины с любыми формами поперечного сечения, которые отличны от цилиндрического (из-за специфики процесса бурения, особенностей горной породы вокруг скважины и т.д.). Характеристики дисперсионных кривых (зависимость скорости распространения акустических волн от частоты волнового процесса) для таких скважин, получаемых при анализе измеряемых в скважине акустических полей, зависят от характеристик источника и в особенности от диаграммы направленности источника сигнала в случае направленного источника (так как при определенных условиях в скважине не удается возбудить полный спектр колебаний). В ряде случаев комбинация геометрических особенностей формы скважины с неудачным направлением сигнала от направленного источника может привести к неудовлетворительному качеству измеряемых акустических данных.
На фиг. 1 показано расположение акустического каротажного прибора 1 в скважине 2, пробуренной в горной породе 3, при котором главная ось акустического прибора не совпадает с осью скважины, т.е. прибор расположен с эксцентриситетом. Различные направление испускания направленного сигнала в таком случае приводят к получению различных дисперсионных кривых. На фиг. 1 показаны первое направление («направление 1») 4 диаграммы направленности сигнала дипольного акустического источника и второе направление («направление 2») 5 диаграммы направленности сигнала дипольного акустического источника. Причинами эксцентриситета могут быть несовершенство методов централизации прибора в скважине, резкое изменение геометрии скважины и другие причины. Например, в статье Denis P. Schmitt Dipole logging in cased boreholes. // J. Acoust. Soc. Am., vol. 93, No 2, February 2013, p. 640-657 отмечено, что в сильно искривленной или горизонтальной скважине, где акустический прибор не может быть эффективно централизован, надежные измерения по-прежнему можно получить при условии, что направление направленности дипольного источника перпендикулярно направлению эксцентриситета.
С целью обеспечения высокого качества акустических данных при проведении акустического каротажа для случаев значительного эксцентриситета прибора в скважине, а также для скважин с не цилиндрической формой поперечного сечения предлагается следующее.
На каждом шаге процедуры акустического каротажа (между измерениями акустического поля) собирают информацию о положении прибора в скважине и/или о форме скважины. Эта информация может быть получена либо с помощью измерений специальных датчиков (которыми может быть дополнительно оснащен акустический прибор), либо на основе анализа текущих акустических измерений, либо любыми другими способами. Упоминание работы измерительного устройства с такими датчиками в составе акустического прибора можно найти в статье Jennifer Market, Chris Bilby Introducing the First LWD Crossed-Dipole Sonic Imaging Service // SPWLA 52nd Annual Logging Symposium, May 14-18, 2011 или же описание такого прибора можно найти в US Patent 20060070433 А1. В качестве ультразвуковых датчиков для таких измерений могут выступать, например, датчики компании Microsonic - http://www.microsonic.de/en/Products/overview.htm?O=4&gclid=CIi3-bKQtsICFVUMjgod0qIAKQ.
Полученную информацию анализируют (автоматически, оператором или любым другим способом) и определяют необходимое направление(я) (по любому заданному критерию) для испускания направленного сигнала(сигналов) и соответственный необходимый угол(углы) поворота источника(ов) сигнала вокруг оси прибора для установления этого положения(ий). Определение необходимого направления может происходить по любому алгоритму. В качестве одного из таких алгоритмов предлагается проводить сравнение текущей конфигурации системы (положение прибора в скважине, форма скважины и т.д.) с заранее заданной базой данных. В базе данных предлагается заранее задать возможные конфигурации системы (с учетом текущего диаметра скважины, типа прибора и т.д.) и соответствующие им необходимые направления испускания сигнала для направленных источников акустического сигнала(ов). Эти направления могут быть получены из теоретических оценок, с помощью численного моделирования или любыми другими методами. В более широком смысле под понятием "необходимое направление" понимается такое направление сигнала направленного источника, которое позволяет возбудить в скважине максимально широкий спектр колебаний. Помимо этого допускается случай, при котором необходимо возбудить в скважине, например, только поперечные колебания. Направление испускания сигнала направленного источника, которое позволяет возбудить в скважине только такой тип колебаний, также попадает под понятие "необходимое направление". В каждом конкретном случае выбор оптимального направления зависит от того, какой тип волн необходимо измерить с помощью акустического прибора, т.е. какой тип колебаний необходимо возбудить в скважине.
Источник(и) поворачивают на необходимый угол, осуществляют испускание сигнала и далее проводят процедуру измерения акустического поля.
Далее приведен пример алгоритма работы прибора с размещенным в скважине дипольным акустическим источником. Алгоритм работы следующий:
1) Прибор перемещают в скважине в текущее положение.
2) Датчики прибора измеряют его положение в скважине относительно главной оси скважины. В качестве таких датчиков могут, например, выступать ультразвуковые датчики. В этом случае эти датчики располагают в составе одного измерительного комплекса вокруг оси прибора с некоторым угловым шагом (например, 90 градусов (4 датчика) или 60 градусов (6 датчиков)). Они синхронно испускают направленные ультразвуковые сигналы, после чего переходят в режим приемников и фиксируют отраженные сигналы от стенок скважины. По разнице приходов на датчики отраженных волн определяется положение прибора в скважине.
В качестве альтернативы могут использоваться оптоэлектронные датчики (например, http://www.balluff.ru/pdf/bos/BOD_63M.pdf). Способность электромагнитного излучения распространяться с постоянной скоростью дает возможность определять дальность до объекта. В этом случае эти датчики аналогично располагают в составе одного измерительного комплекса вокруг оси прибора с некоторым угловым шагом (например, 90 градусов (4 датчика) или 60 градусов (6 датчиков)). Каждый из датчиков по окружности измеряет расстояние до стенки скважины, что позволяет оценить положение центра прибора по отношению к центру скважины и/или форму скважины. Определения расстояния сводится к измерению соответствующего интервала времени между зондирующим сигналом и сигналом, отраженным от цели. Различают три метода измерения дальности в зависимости от того, какой характер модуляции лазерного излучения используется в датчике: импульсный, фазовый или фазо-импульсный (комбинация первых двух).
Сущность импульсного метода состоит в том, что к стенке скважины посылают зондирующий импульс, он же запускает временной счетчик в датчике. Когда отраженный импульс приходит к датчику, то он останавливает работу счетчика. По временному интервалу (задержке отраженного импульса) определяется расстояние до объекта.
При фазовом методе лазерное излучение модулируется по синусоидальному закону с помощью модулятора (электрооптического кристалла, изменяющего свои параметры под воздействием электрического сигнала). Обычно используют синусоидальный сигнал с частотой 10…150 МГц (измерительная частота). Отраженное излучение попадает в приемную оптику и фотоприемник, где выделяется модулирующий сигнал. В зависимости от дальности до стенки скважины изменяется фаза отраженного сигнала относительно фазы сигнала в модуляторе. Измеряя разность фаз, определяют расстояние до объекта.
3) Информация о положении прибора передается в блок обработки данных.
4) В блоке обработки данных происходит оценка расположения прибора и/или форма скважины и по заранее заданной базе данных определяется необходимое направление испускания направленного сигнала дипольным источником. База данных может быть заранее сформирована для конкретного диаметра скважины и конкретных характеристик прибора на основе предварительного численного моделирования, результатов эксперимента или аналитических расчетов. В качестве альтернативы возможные варианты могут просчитываться внутри блока обработки данных на основе текущей информации о расположении прибора, типа прибора и любых других данных от других типов датчиков. При этом блок обработки данных может быть заключен как внутри прибора, так и на поверхности земли, либо комбинацией блоков внутри прибора и на поверхности земли. Решение о необходимом направлении сигнала принимается на основе заранее задаваемой информации о том, какой тип измерений необходимо провести, т.е. какой спектр колебаний возбудить в скважине. Например, как показано на Фиг. 2 и Фиг. 3, при испускании сигнала в различных направлениях - направлениях 1 и 2 - происходит возбуждение различного спектра колебаний - дисперсионные кривые различны. Пунктирные линии на Фиг. 2 и Фиг. 3 - аналитические дисперсионные кривые для скважины без прибора (скважина для всех случаев предполагается заполненной жидкостью), сплошные линии - дисперсионные кривые, полученные для случая, когда в скважине находится прибор, расположенный с эксцентриситетом (результат получен с помощью численного моделирования).
5) В блоке обработки данных определяется угол Ω между текущим положением дипольного источника (т.е. направлением его диаграммы направленности) и уже определенным на предыдущем шаге необходимым направлением испускания направленного сигнала (текущее расположение источника, естественно, определяется исходя из информации от датчиков расположения прибора в скважине). Значение угла поворота передается на поворотный механизм секции (и1) прибора, содержащей источник(ки) (может быть механическим, магнитным и т.п.).
6) Поворотный механизм поворачивает секцию с источником на угол Ω.
7) Источник испускает сигнал и приемник(приемники) фиксирует(ют) акустическое поле, т.е. происходит запись измерений.
8) Цикл повторяется.

Изобретение относится к области геофизики и может быть использовано в процессе геофизических исследований скважин. Согласно заявленному способу в скважине размещают с возможностью перемещения акустический каротажный прибор, содержащий по меньшей мере один источник направленных акустических сигналов и по меньшей мере один приемник. На каждом шаге акустического каротажа перед проведением измерений определяют положение акустического каротажного прибора в скважине и/или форму скважины. Определяют необходимое направление для испускания направленного акустического сигнала и вычисляют угол поворота источника вокруг оси прибора для обеспечения необходимого направления. Осуществляют поворот источника направленных акустических сигналов на вычисленный угол и осуществляют акустические измерения. Технический результат - повышение качества каротажных данных. 6 з.п. ф-лы, 3 ил.
1. Способ акустического каротажа, в соответствии с которым:
- в скважине размещают с возможностью перемещения акустический каротажный прибор, содержащий по меньшей мере один источник направленных акустических сигналов и по меньшей мере один приемник,
- на каждом шаге акустического каротажа перед проведением измерений определяют положение акустического каротажного прибора в скважине и/или форму скважины,
- определяют необходимое направление для испускания направленного акустического сигнала,
- вычисляют угол поворота источника вокруг оси прибора для обеспечения необходимого направления,
осуществляют поворот источника направленных акустических сигналов на вычисленный угол и осуществляют акустические измерения.
2. Способ по п. 1, в соответствии с которым положение акустического каротажного прибора в скважине определяют на основе измерений датчиков.
3. Способ по п. 2, в соответствии с которым в качестве датчиков используют ультразвуковые датчики.
4. Способ по п. 2, в соответствии с которым в качестве датчиков используют оптоэлектронные датчики.
5. Способ по п. 1, в соответствии с которым форму скважины определяют на основе измерений датчиков.
6. Способ по п. 5, в соответствии с которым в качестве датчиков используют ультразвуковые датчики.
7. Способ по п. 6, в соответствии с которым в качестве датчиков используют оптоэлектронные датчики.
| US 20070140055 A1, 21.06.2007 | |||
| US 20060070433 A1, 06.04.2006 | |||
| US 5168470 A1, 01.12.1992 | |||
| Многоприборный трехкомпонентный ориентируемый зонд | 1980 |
|
SU928285A1 |

