Изобретение относится к геофизическим исследованиям, в частности к способам акустического каротажа.
Акустический каротаж является одним из способов, которые реализуются на практике для акустического исследования скважин. При акустическом каротаже в скважине с помощью акустического источника возбуждаются упругие колебания, которые распространяются в скважиной жидкости и окружающих скважину горных породах и фиксируются приемниками акустических волн, которые расположены в той же скважине. Как правило, акустический каротаж осуществляется с помощью использования скважиных акустических каротажных приборов, которые позволяют измерить время пробега основных типов волн по горной породе от источника к набору приемников. Результаты таких измерений позволяют создать геоакустические модели разрезов скважин для интерпретации данных сейсморазведки, определить упругие модули горных пород, провести оценку пористости пород и т.д. Качество акустических измерений при проведении каротажа в реальных полевых условиях зависит от многих факторов - формы ствола скважины, типа источника сигнала, расположения каротажного прибора в скважине и т.д. Последний фактор особенно важен для приборов с направленным сигналом источника, т.е. источника, у которого можно четко выделить направления испускания сигнала в соответствии с диаграммой направленности источника, где под диаграммой направленности источника акустических волн по полю давления (применительно к источникам в жидких средах, т.е. тех средах, которые присутствуют в скважинах) следует понимать зависимость амплитуды давления, создаваемого источником, от угловых координат и точки наблюдения в горизонтальной и/или вертикальной плоскости. К таким источникам, например, относятся дипольный или квадрупольный источники акустических волн, которые применяются в приборах с целью получении информации о анизотропии горных пород вдоль ствола скважины.
Одной из проблем при проведении акустического каротажа скважины при использовании направленных источников является вращение прибора от измерения к измерению из-за влияния кабеля, применяемого для перемещения прибора вдоль ствола скважины, а также различных других причин. Для решения этой проблемы на практике используются специальные датчики, которые измеряют угол поворота прибора вокруг своей оси на каждом шаге акустического каротажа. Эта информация в дальнейшем используется при обработке записанных приемниками акустических данных (акустических трасс) (см., например, Darwin V. Ellis, and Julian M. Singer, Well Logging for Earth Scientists, Springer: Dordrecht, The Netherlands (2008) p. 524, 549-550, статью J. Walsh, J. Urdea, J. Hyde, H. Simon (Schlumberger), S. Horen, WesternGeco, C. Thompson (4C Exploration), G. De, R. Morgan (Chevron Texaco) Determining Fracture or Stress Direction Through Casing: A Case Study // 43rd Annual SPWLA Symposium, June 2-5, 2002, или патент РФ 2326237).
В то же время существуют ограничения на максимальный угол поворота прибора вокруг своей оси во время двух последовательных операций измерения акустического поля. Качество акустических данных каротажа существенно снижается при превышении угла максимально допустимого вращения. В этом случае обработка данных не может быть сделана с приемлемой точностью.
Технический результат, достигаемый при реализации изобретения, заключается в повышении качества получаемых в процессе каротажа акустических данных за счет компенсации вращения прибора акустического каротажа во время проведения измерений в скважине.
В соответствии с предлагаемым способом в скважине размещают с возможностью перемещения акустический каротажный прибор, состоящий из по меньшей мере одной секции, содержащей по меньшей мере один источник направленных акустических сигналов, и по меньшей мере одной секции, содержащей по меньшей мере один приемник акустических сигналов, состоящий из набора датчиков, расположенных по окружности в фиксированном положении относительно друг друга. На каждом шаге акустического каротажа определяют относительный угол поворота акустического карторажного прибора вокруг своей оси. Вычисляют угол коррекции для секций, содержащих по меньшей мере один источник направленных акустических сигналов, и/или для секций, содержащих по меньшей мере один приемник акустических сигналов, и осуществляют корректирующее вращение тех секций акустического каротажного прибора, для которых был определен угол коррекции.
Относительный угол поворота прибора может быть определен на каждом шаге процедуры акустического каротажа на основе измерений датчиков, которые могут измерять, например, направление силы тяжести или направление магнитного поля земли.
Источник направленных акустических сигналов может быть дипольным или квадрупольным.
Вращение секций акустического прибора на угол коррекции может быть осуществлено при помощи любого типа привода (механический привод, магнитный, и т.п.).
Изобретение поясняется чертежами, где на фиг. 1 в качестве примера показан алгоритм коррекции при произвольном вращении прибора, содержащего приемник и дипольный источник акустических волн, на фиг. 2 - алгоритм коррекции при произвольном вращении прибора, содержащего приемник и квадрупольный источник акустических волн.
Акустический сигнал возбуждается источником (или несколькими источниками), являющимся частью акустического карторажного прибора, распространяется через скважинную жидкость и окружающие эластичные материалы, а возникающее в скважине акустическое поле записывается (регистрируется) с помощью акустических приемников. При этом предполагается, что источник испускает направленный сигнал (возбуждается, например, дипольный или квадрупольный акустический сигнал). Каждый приемник состоит из набора расположенных по окружности в фиксированном положении относительно друг друга датчиков. В этом случае каждый датчик приемника записывает набор уникальных акустических данных (их число совпадает с количеством датчиков по окружности) из-за различий во времени пробега акустических волн от источника. Прибор может содержать любую комбинацию чередующихся секций с источниками и приемниками, например, он может содержать секцию с источником, потом секцию с приемником, потом опять секцию с источником (как в некоторых приборах) или иметь другую конфигурацию.
Акустический скважинный прибор на каждом шаге процедуры акустического каротажа может поворачиваться вокруг своей оси на некоторый угол из-за неровностей стенок скважины, влияния эффекта преднатяжения троса, геометрии скважины и т.д. Соответственно, при вращении прибора вокруг своей оси происходит изменение направления диаграммы направленности направленного источника в составе прибора от измерения к измерению относительно первоначальной точки наблюдения. Аналогично происходит и вращение приемника в составе прибора, что, соответственно, влечет за собой изменение пространственного расположения датчиков составного акустического приемника, расположенных по окружности вокруг оси прибора, по отношению к предыдущему расположению на предыдущем шаге акустического каротажа. Корректирующее вращение секций с источниками и секций с приемниками вокруг оси прибора на конкретный для каждого случая угол на каждом шаге акустического каротажа позволит сохранить постоянными направление(я) диаграммы направленности источника(ов) относительно первоначальной точки наблюдения и пространственные расположения датчиков приемника. Это позволит получить каротажные данные с отсутствием необходимости учета поворотов прибора от измерения к измерению при обработке данных.
Относительный угол поворота прибора может быть определен на каждом шаге процедуры акустического каротажа на основе измерений специальных датчиков или любыми другими способами. Специальный датчик (или датчики) могут измерять направление силы тяжести (особенно актуально для горизонтальных и наклонных скважин), направление магнитного поля земли, проводить ориентацию по заранее нанесенным на обсадную колонну скважины меткам или измерять любые другие параметры, которые позволяют количественно оценить вращение прибора в скважине и, соответственно, необходимое значение угла поворота для коррекции.
Для измерения направления силы тяжести могут использоваться датчики, которые предоставляют информацию о направлении вектора силы тяжести. К этой группе датчиков можно отнести различные типы физического маятника. Вторая группа гравитационных датчиков включает в себя датчики, которые реагируют на величину ускорения, а именно - ускорение свободного падения (акселерометры). Примером таких датчиков могут служить семейство микромеханических интегральных акселерометров iMEMS (http://www.analog.com/en/mems-sensors/mems-accelerometers/products/index.html#MEMS_Accelerometers) компании "Analog Devices", а именно, например, ADXL206 (http://www.analog.com/en/mems-sensors/mems-accelerometers/adxl206/products/product.html) и датчик угла наклона ДУН-02 (http://www.grant-ufa.ru/pdf/dun-02.pdf) компании "Грант" (http://www.grant-ufa.ru/), позволяющий делать измерения углов наклона по двум горизонтальным осям относительно направления силы тяжести Земли и измерения угла вращения датчика (в случае расположения его оси вращения перпендикулярно направлению силы тяжести Земли).
Для измерения направления магнитного поля земли в основном используют различные датчики магнитного поля - устройства, создающие электрический сигнал, характеристики которого зависят от величины индукции магнитного поля (обычно одной из его проекций на некоторое выделенное направление). Существуют различные типы датчиков, служащие для измерения магнитных полей, основными из которых являются: магнитомеханические, индукционные, гальваномагнитные, магниторезонансные, феррозондовые, магниторезистивные, а также типа SQUID (Superconducting Quantum Interference Devices - квантовые интерференционные устройства на основе сверхпроводимости). Примеры таких датчиков можно найти, например, в патенте США №6692847, заявке Японии №10/020946, патенте СССР №1190743, патенте РФ №2202805.
Для ориентации по заранее нанесенным меткам применимы оптические и ультразвуковые датчики. Последние особенно эффективны в скважинах при ограниченной видимости и при нанесении меток путем насечек на внутреннюю поверхность обсадной трубы. Примеры таких датчиков могут быть найдены здесь: http://www.sensorlink.ru/pdf/Datalogic-2011_rus.pdf. Кроме того, могут использоваться и другие типы датчиков - датчики радиации (при использовании радиоактивных меток), датчики магнитного поля (для магнитных меток) и т.д.
Измеренные параметры передаются в модуль обработки данных (вычислительный комплекс), который может находиться либо внутри прибора, либо на поверхности (в этом случае данные передаются в этот модуль любым способом). Модуль обработки данных вычисляет угол коррекции (угол поворота) для секций с источниками и/или секций с приемниками. Кроме того, искомый угол поворота для каждого шага процесса каротажа может быть определен прямым измерением угла вращения прибора в скважине с помощью любого метода. Обратное механическое вращение секций прибора, содержащих источники и приемники акустических волн, на необходимый угол может быть осуществлено при помощи любого типа привода (механический привод, магнитный, и т.п.) / любым способом.
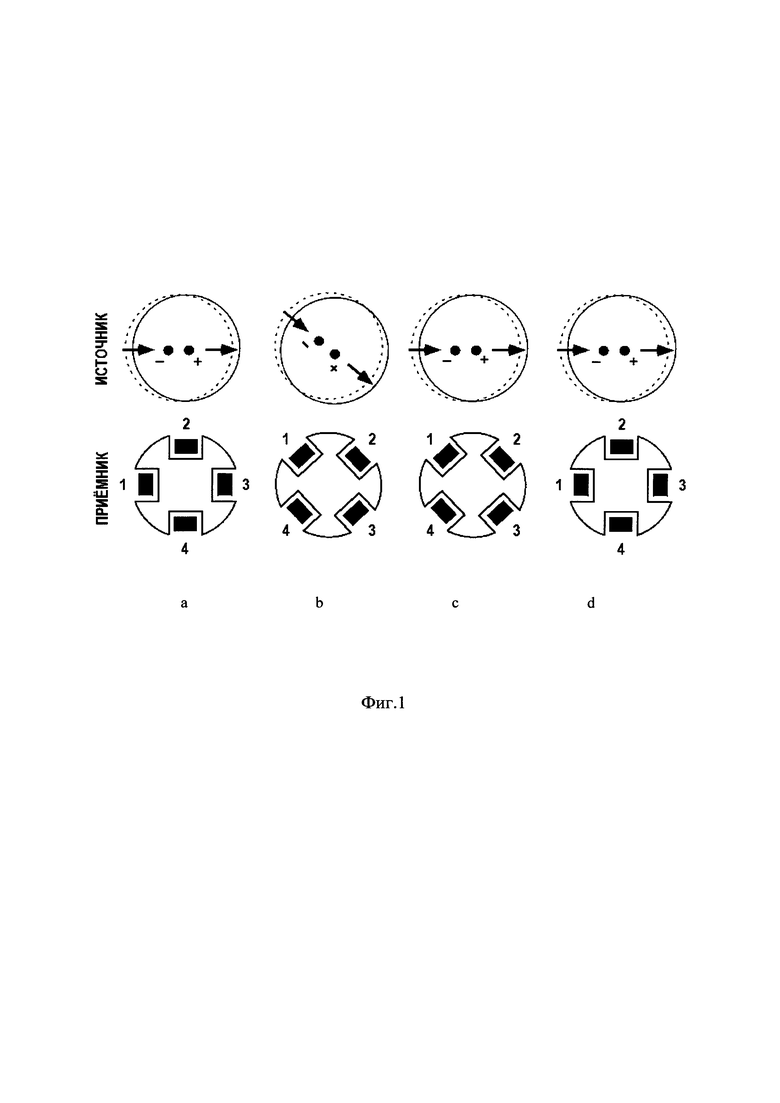
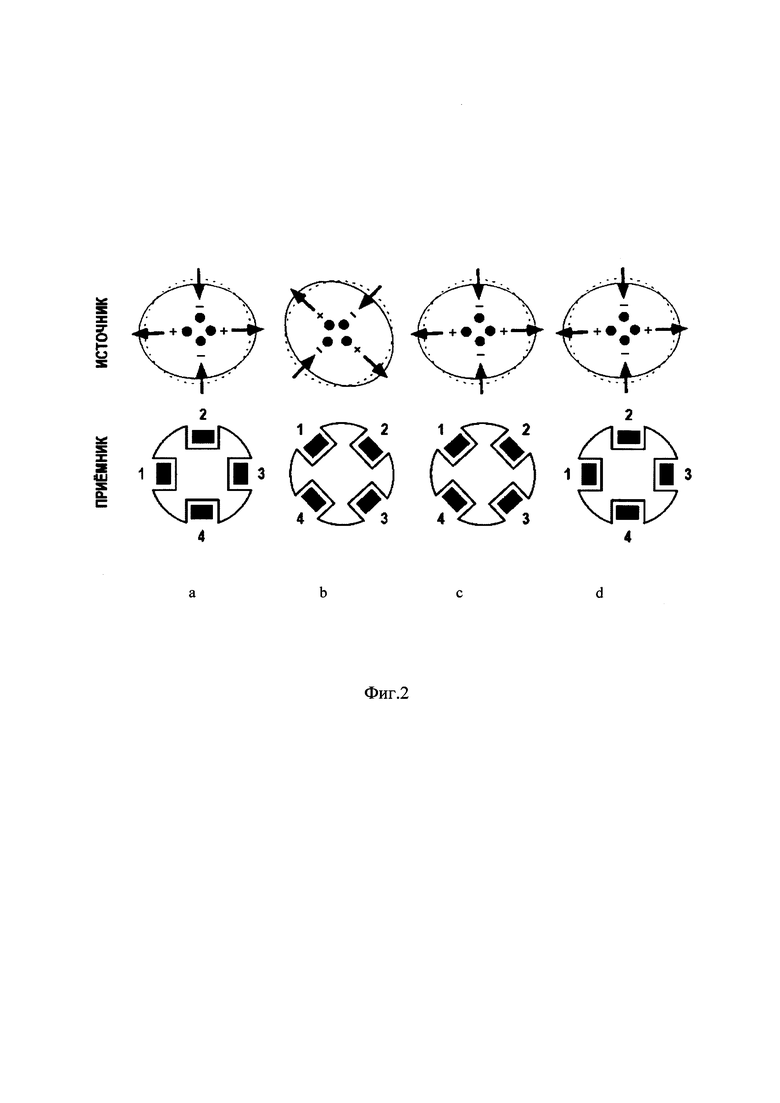
Алгоритм работы коррекционного механизма представлен на фиг. 1 на примере системы, состоящей из одной секции с одним дипольным источником акустических сигналов и одной секции с одним составным приемником, а также на фиг. 2 на примере системы, состоящей из одной секции с одним квадрупольным источником акустических сигналов и одной секции с одним составным приемником.
На фиг. 1 первоначальному расположению источника и приемника акустических сигналов соответствует позиция (a). Датчики 1 и 3 в составе приемника сонаправлены (параллельны) направлению диаграммы направленности дипольного источника акустических сигналов; датчики 2 и 4 - перпендикулярны.
Позиция (b) соответствует повороту прибора на некий угол Ω под воздействием внешних условий (вращение по часовой стрелке). Источник и приемник акустических сигналов имеют такое же относительное расположение, как и до поворота.
Позиция (c) соответствует корректирующему (обратному) повороту секции с источником на угол Ω (вращение против часовой стрелки). Перед осуществлением поворота информация о вращении прибора (по часовой стрелке) была получена в результате измерения специальными датчиками. Для данного случая секция с источником была повернута в обратную сторону на тот же угол, а секция с приемником - нет. В результате датчики 1 и 3 приемника не параллельны направлению диаграммы направленности уже скорректированного дипольного источника (как и датчики 2 и 4). Данная ситуация применима в случае, когда возможность вращения имеет только источник, а взаимное расположение датчиков приемника акустических волн не важно (либо источник имеет другую конструкцию).
Позиции (d) соответствует корректирующий поворот секции с приемником на угол Ω (вращение против часовой стрелки). В этом случае датчики 1 и 3 приемника сонаправлены (параллельны) направлению диаграммы направленности дипольного источника акустических сигналов; датчики 3 и 4 - перпендикулярны. Таким образом, система была возвращена в начальное положение (позиция (a)). Такой сценарий возможен при вращении как секции с источником акустических сигналов, так и секции с приемником акустических сигналов.
В последнем случае, то есть когда секции с источником и приемником могут синхронно вращаться (позиция (d)), для любого измерения заранее известно взаимное расположение окружных датчиков каждого приемника (обобщая на прибор с несколькими приемниками) и направление сигнала источника(ов), так как для каждого цикла каротажа оно постоянно. Данная особенность позволяет упростить алгоритм обработки акустических данных.
На фиг. 2 первоначальному расположению источника и приемника акустических волн соответствует позиция (a). Датчики 1 и 3 в составе приемника сонаправлены (параллельны) направлению "+" диаграммы направленности квадрупольного источника акустических волн, датчики 2 и 4 - сонаправлены (параллельны) направлению "-" диаграммы направленности квадрупольного источника акустических волн и, соответственно, перпендикулярны направлению "+".
Позиция (b) соответствует произвольныму повороту прибора на угол Ω, (вращение по часовой стрелке) под воздействием внешних условий.
Позиция (c) соответствует корректирующему (обратному) повороту секции с источником на угол Ω (вращение против часовой стрелки). В этом случае датчики 1 и 3 приемника, и, соответственно, 2 и 4 не параллельны соответствующим направлениям диаграммы направленности сигнала уже скорректированного источника.
Позиция (d) соответствует корректирующему повороту секций с приемником на угол Ω (вращение против часовой стрелки). Датчики 1 и 3 в составе приемника параллельны направлению "+" диаграммы направленности квадрупольному источника акустических волн, датчики 2 и 4 - параллельны направлению "-" диаграммы направленности квадрупольному источника акустических волн и, соответственно, перпендикулярны направлению "+". Таким образом, система была возвращена в исходное положение (позиция (a)).
При использовании нескольких секций алгоритм коррекции тот же, только вращать надо синхронно все секции с источниками и все секции с приемником.
Изобретение относится к средствам акустического каротажа в скважине. Техническим результатом является повышение качества получаемых в процессе каротажа акустических данных за счет компенсации вращения прибора акустического каротажа во время проведения измерений в скважине. Предложен способ акустического каротажа, в соответствии с которым: в скважине размещают с возможностью перемещения акустический каротажный прибор, состоящий из по меньшей мере одной секции, содержащей по меньшей мере один источник направленных акустических сигналов, и по меньшей мере одной секции, содержащей по меньшей мере один приемник акустических сигналов, состоящий из набора датчиков, расположенных по окружности в фиксированном положении относительно друг друга, при этом секции, содержащие по меньшей мере один источник направленных акустических сигналов, и секции, содержащие по меньшей мере один приемник акустических сигналов, выполнены с возможностью совместного вращения и вращения независимо друг от друга. Причем на каждом шаге акустического каротажа определяют относительный угол поворота акустического прибора вокруг своей оси, вычисляют угол коррекции для секций, содержащих по меньшей мере один источник направленных акустических сигналов, и/или для секций, содержащих по меньшей мере один приемник акустических сигналов, и осуществляют компенсационное вращение тех секций акустического каротажного прибора, для которых был вычислен угол коррекции. 8 з.п. ф-лы, 2 ил.
1. Способ акустического каротажа, в соответствии с которым:
- в скважине размещают с возможностью перемещения акустический каротажный прибор, состоящий из по меньшей мере одной секции, содержащей по меньшей мере один источник направленных акустических сигналов, и по меньшей мере одной секции, содержащей по меньшей мере один приемник акустических сигналов, состоящий из набора датчиков, расположенных по окружности в фиксированном положении относительно друг друга, при этом секции, содержащие по меньшей мере один источник направленных акустических сигналов, и секции, содержащие по меньшей мере один приемник акустических сигналов, выполнены с возможностью совместного вращения и вращения независимо друг от друга,
- на каждом шаге акустического каротажа определяют относительный угол поворота акустического прибора вокруг своей оси,
- вычисляют угол коррекции для секций, содержащих по меньшей мере один источник направленных акустических сигналов, и/или для секций, содержащей по меньшей мере один приемник акустических сигналов, и
осуществляют компенсационное вращение тех секций акустического каротажного прибора, для которых был вычислен угол коррекции.
2. Способ по п. 1, в соответствии с которым относительный угол поворота акустического каротажного прибора вокруг своей оси определяют на основе измерений датчиков.
3. Способ по п. 2, в соответствии с которым датчики измеряют направление силы тяжести.
4. Способ по п. 2, в соответствии с которым датчики измеряют направления магнитного поля земли.
5. Способ по п. 1, в соответствии с которым источник направленных акустических сигналов представляет собой дипольный источник.
6. Способ по п. 1, в соответствии с которым источник направленных акустических сигналов представляет собой квадрупольный источник.
7. Способ по п. 1, в соответствии с которым компенсационное вращение секций скважинного прибора осуществляют при помощи привода.
8. Способ по п. 5, в соответствии с которым привод является механическим.
9. Способ по п. 5, в соответствии с которым привод является магнитным.
| US 5159578 A1, 27.10.1992 | |||
| WO 2002039143 A2, 16.05.2002 | |||
| Датчик угла наклона объекта | 1990 |
|
SU1747872A1 |
| СКВАЖИННЫЕ УСТРОЙСТВА, УПРАВЛЯЕМЫЕ ПО РАДИАЛЬНОМУ ПОЛОЖЕНИЮ, И СПОСОБЫ ИХ ПРИМЕНЕНИЯ | 2004 |
|
RU2319833C2 |
| СКВАЖИННЫЙ ПРИБОР ГРАВИТАЦИОННОЙ РАЗВЕДКИ И СПОСОБ ГРАВИТАЦИОННОЙ РАЗВЕДКИ СКВАЖИНЫ | 1998 |
|
RU2178575C2 |
| US 4984652 A, 15.01.1991 | |||
| WO 1997027502 A1, 31.07.1997 | |||
| WO 2013043468 A1, 28.03.2013. | |||

