(5) МНОГОПРИБОРНЫЙ ТРЕХКОМПОНЕНТНЫЙ ОРИЕНТИРУЕМЫЙ
ЗОНД
| название | год | авторы | номер документа |
|---|---|---|---|
| Многоприборный трехкомпонентный ориентируемый зонд | 1979 |
|
SU864218A1 |
| Способ азимутальной ориентации сейсмоприемников многоприборного трехкомпонентного зонда в скважинах | 1981 |
|
SU1045187A1 |
| Многоприборный ориентируемый скважинный зонд | 1987 |
|
SU1430925A1 |
| Устройство для ориентации сейсмоприемников в скважине | 1982 |
|
SU1053039A2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ СЕЙСМОПРИЕМНИКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2209449C1 |
| Устройство для ориентиации сква-жиННОгО зОНдА | 1979 |
|
SU840776A1 |
| Способ получения сейсмических записей,ориентированных по азимуту в скважине | 1985 |
|
SU1325393A1 |
| Устройство для ориентации сейсмоприемников в скважинах | 1982 |
|
SU1124236A1 |
| Устройство для ориентации сейсмоприемников в скважине | 1980 |
|
SU935851A1 |
| ИНКЛИНОМЕТР | 1995 |
|
RU2111454C1 |
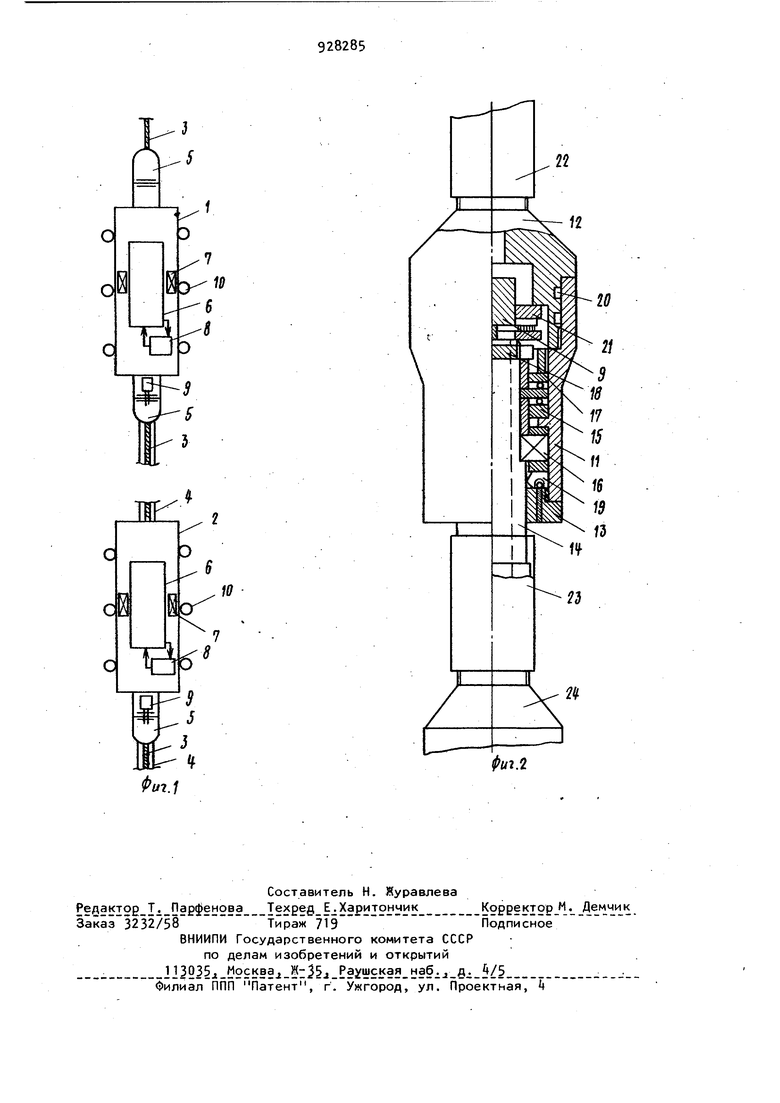
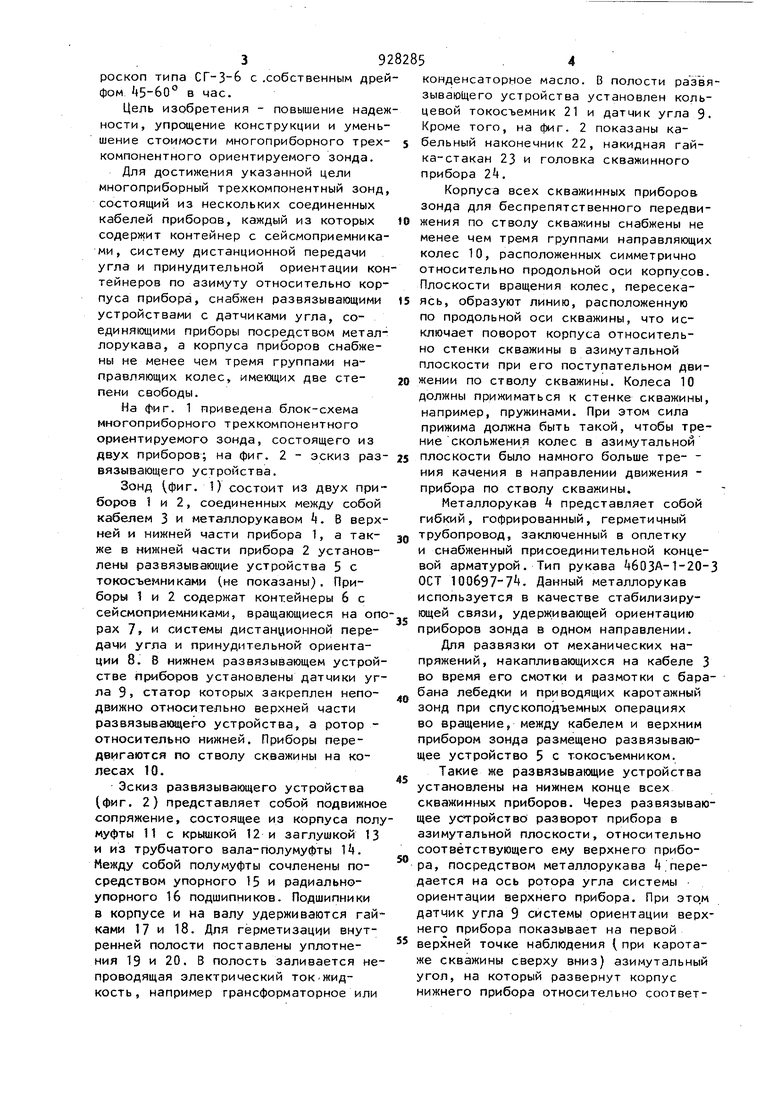
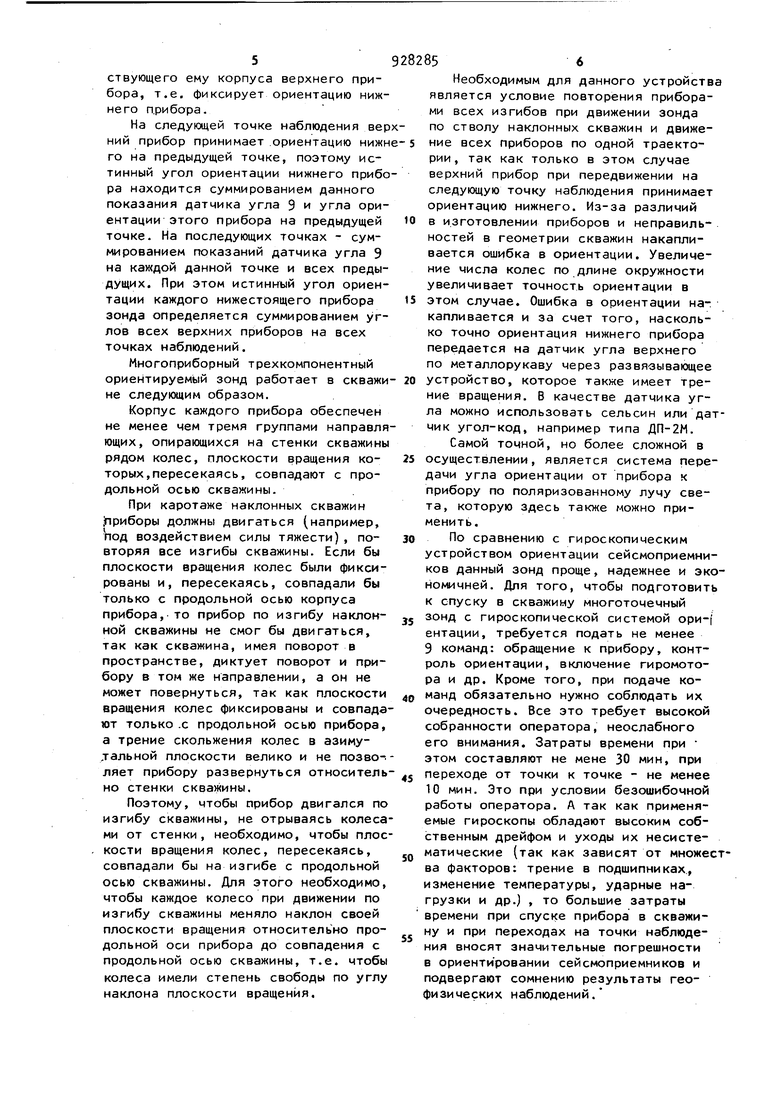
Изобретение относится к сейсмическим исследованиям и предназначено для ориентации сейсмоприемников в обсаженных скважинах с целью получения сейсмических записей, ориентированных по азимуту. Для ориентации сейсмоприемников в обсаженных скважинах можно применять устройства, основанные на использовании данных инклинометрии скважины til Устройства ориентации сейсмоприемНИКОВ, основанные на использовании данных инклинометрии, могут работать только в наклонных скважинах. При это с уменьшением угла наклона точность ориентации резко падает. Известны устройства, основанные на использовании гироскопов 21. Использование гироскопической системы ориентации связано с уменьшением надежности,так как горископ - это электромеханическая система с большим количеством элементов высокой сложности; с увеличением стоимости скважинных .приборов, так как стоимость гиросТШ ;по8, отвечающих техническим требованиям разрабатываемой скважинной сейсмической аппаратуры, исчисляется десятками тысяч рублей, а также со снижением производительности, связанной с затратами времени на разгок и торможение гиромотора. Известен многоприборный трехкомпонентный зонд, состоящий из нескольких соединенных кабелем приборов, каждый из которых содержит контейнер с сейсмоприемниками, систему дистанционной передачи угла и принудительной ориентации контейнеров по азимуту относительно корпуса прибора. В этом зонде гироскопическую систему имеет только один из приборов, а ориентация остальных осуществляется по поляризованному лучу света 3J. Эта конструкция, оснащенна|| сложной дорогостоящей гироскопической системой, имеет низкую точность ориентации, так как в ней применён гироскоп типа с .собственным дрей фом S(Q° в час. Цель изобретения - повышение надеж ности, упрощение конструкции и уменьшение стоимости многоприборного трехкомпонентного ориентируемого зонда. Для достижения указанной цели многоприборный трехкомпонентный зонд состоящий из нескольких соединенных кабелей приборов, каждый из которых содержит контейнер с сейсмоприемниками, систему дистанционной передачи угла и принудительной ориентации кон тейнеров по азимуту относительно корпуса прибора, снабжен развязывающими устройствами с датчиками угла, соединяющими приборы посредством металлорукава, а корпуса приборов снабжены не менее чем тремя группами направляющих колес, имекйцих две степени свободы. На фиг. 1 приведена блок-схема многоприборного трехкомпонентного ориентируемого зонда, состоящего из двух приборов; на фиг. 2 - эскиз раз вязывающего устройства. Зонд (фиг, 1) состоит из двух приборов 1 и 2, соединенных между собой кабелем 3 и металлорукавом . В верх ней и нижней части прибора 1, а также в нижней части прибора 2 установлены развязывающие устройства 5 с токосъемниками (не показаны). Приборы 1 и 2 содержат контейнеры 6 с сейсмоприемниками, вращающиеся на опо рах 7 и системы дистанционной передачи угла и принудительной ориентации 8. 8 нижнем развязывающем устрой стве приборов установлены датчики ла 9. статор которых закреплен неподвижно относительно верхней части развязывакйцего устройства, а ротор относительно нижней. Приборы передвигаются по стволу скважины на колесах 10. Эскиз развязывающего устройства (фиг. 2) представляет собой подвижно сопряжение, состоящее из корпуса полу муфты 11 с крышкой 12 и заглушкой 13 и из трубчатого вала-полумуфты 1. Между собой полумуфты сочленены посредством упорного 15 и радиальноупорного 16 подшипников. Подшипники в корпусе и на валу удерживаются гай ками 17 и 18. Для герметизации внутренней полости поставлены уплотнения 19 и 20, В полость заливается непроводящая электрический ток-жидкость, например грансформаторное или конденсаторное масло. В полости развязывающего устройства установлен кольцевой токосъемник 21 и датчик угла 9. Кроме того, на фиг. 2 показаны кабельный наконечник 22, накидная гайка-стакан 23 и головка скважинного прибора 2k, Корпуса всех скважинных приборов зонда для беспрепятственного передвижения по стволу скважины снабжены не менее чем тремя группами направляющих колес 10, расположенных симметрично относительно продольной оси корпусов. Плоскости вращения колес, пересекаясь, образуют линию, расположенную по продольной оси скважины, что исключает поворот корпуса относительно стенки скважины в азимутальной плоскости при его поступательном движении по стволу скважины. Колеса 10 должны прижиматься к стенке скважины, например, пружинами. При этом сила прижима должна быть такой, чтобы трение скольжения колес в азимутальной плоскости было намного больше тре- ния качения в направлении движения прибора по стволу скважины. Металлорукав 4 представляет собой гибкий, гофрированный, герметичный трубопровод, заключенный в оплетку и снабженный присоединительной концевой арматурой. Тип рукава 4603А-1-20-3 ОСТ 100697-7. Данный металлорукав используется в качестве стабилизирущей связи, удерживающей ориентацию приборов зонда в одном направлении. Для развязки от механических напряжений, накапливающихся на кабеле 3 во время его смотки и размотки с барабана лебедки и приводящих каротажный зонд при спускоподъемных операциях во вращение, между кабелем и верхним прибором зонда размещено развязывающее устройство 5 с токосъемником. Такие же развязывающие устройства установлены на нижнем конце всех скважинных приборов. Через развязывающее устройство разворот прибора в азимутальной плоскости, относительно соответствующего ему верхнего прибо . ра, посредством металлорукава ч.передается на ось ротора угла системы ориентации верхнего прибора. При это.м датчик угла 9 системы ориентации верхнего прибора показывает на первой верхней точке наблюдения (при каротаже скважины сверху вниз) азимутальный угол, на который развернут корпус нижнего прибора относительно соответствующего ему корпуса верхнего прибора, т.е. фиксирует ориентацию нижнего прибора. На следующей точке наблюдения вер ний прибор принимает .ориентацию нижн го на предыдущей точке, поэтому истинный угол ориентации нижнего прибо ра находится суммированием данного показания датчика угла 9 и угла ориентации этого прибора на предыдущей точке. На последующих точках - суммированием показаний датчика угла 9 на каждой данной точке и всех предыдущих. При этом истинный угол ориентации каждого нижестоящего прибора зонда определяется суммированием углов всех верхних приборов на всех точках наблюдений. Многоприборный трехкомпонентный ориентируемый зонд работает в скважи не следующим образом. Корпус каждого прибора обеспечен не менее чем тремя группами направля ющих, опирающихся на стенки скважины рядом колес, плоскости вращения которых,пересекаясь, совпадают с продольной осью скважины. При каротаже наклонных скважин Приборы должны двигаться (например, под воздействием силы тяжести), повторяя все изгибы скважины. Если бы плоскости вращения колес были фиксированы и, пересекаясь, совпадали бы только с продольной осью корпуса прибора, то прибор по изгибу наклонной скважины не смог бы двигаться, так как скважина, имея поворот в пространстве, диктует поворот и прибору в том же направлении, а он не может повернуться, так как плоскости вращения колес фиксированы и совпада ют только .с продольной осью прибора, а трение скольжения колес в азимутальной плоскости велико и не поз воляет прибору развернуться относитель но стенки скважины. Поэтому, чтобы прибор двигался по изгибу скважины, не отрываясь колеса ми от стенки, необходимо, чтобы плос кости вращения колес, пересекаясь, совпадали бы на изгибе с продольной осью скважины. Для этого необходимо, чтобы каждое колесо при движении по изгибу скважины меняло наклон своей плоскости вращения относительно продольной оси прибора до совпадения с продольной осью скважины, т.е. чтобы колеса имели степень свободы по углу наклона плоскости вращения. Необходимым для данного устройства является условие повторения приборами всех изгибов при движении зонда по стволу наклонных скважин и движение всех приборов по одной траектории, так как только в этом случае верхний прибор при передвижении на следующую точку наблюдения принимает ориентацию нижнего. Из-за различий в изготовлении приборов и неправильностей в геометрии скважин накапливается ошибка в ориентации. Увеличение числа колес по длине окружности увеличивает точность ориентации в этом случае. Ошибка в ориентации на-: капливается и за счет того, насколько точно ориентация нижнего прибора передается на датчик угла верхнего по металлорукаву через развязывающее устройство, которое также имеет трение вращения. В качестве датчика угла можно использовать сельсин или датчик угол-код, например типа ДП-2М. Самой точной, но более сложной в осуществлении, является система передачи угла ориентации от прибора к прибору по поляризованному лучу света, которую здесь также можно применить. По сравнению с гироскопическим устройством ориентации сейсмоприемников данный зонд проще, надежнее и экономичней. Для того, чтобы подготовить к спуску в скважину многоточечный зонд с гироскопической системой ориентации, требуется подать не менее 9команд: обращение к прибору, контроль ориентации, включение гиромотора и др. Кроме того, при подаче команд обязательно нужно соблюдать их очередность. Все это требует высокой собранности оператора, неослабного его внимания. Затраты времени при этом составляют не мене 30 мин, при переходе от точки к точке - не менее 10мин. Это при условии безошибочной работы оператора. А так как применяемые гироскопы обладают высоким собственным дрейфом и уходы их несистематические (так как зависят от множества факторов: трение в подшипниках, изменение температуры, ударные нагрузки и др.) , то большие затраты времени при спуске прибора в скважину и при переходах на точки наблюдения вносят значительные погрешности в ориентировании сейсмоприемников и подвергают сомнению результаты геофизических наблюдений. 79 При эксплуатации многоточечного трехкомпонентного гироскопического зонда знаний геофизика-оператора (а это, как правило, техники-геофизики совершенно недостаточно. Таких oneраторов необходимо специально обучат либо вводить .дополнительно в штат геофизического отряда инженера, хорошо разбирающегося в радиоэлектронике. Предлагаемый же способ и устроиство просты по своей сути и при эксплуатации не требуют подготовки кадров. Ремонт и настройка таких блоков гироскопического зонда как система ориентации и система упрйвле иия в полевых условиях невозможны, так как требуют привлечения специальной аппаратуры, которой геофизиче кие подразделения не обеспечиваются. Например, аппаратуры для проверки работы гироскопа. Устройство может работать без помех в условиях повышенных (более +120°С) температур. Ги роскопические же зонды без термостабилизирующих устройств могут работат только до (+60).- (+80)С. Зонд предпочтительно использовать для работы в новых скважинах, в кото рых обсадные трубы незначительно изменены коррозией. Каротаж скважины можно проводить как традиционным способом снизу ввер так и сверху вниз. Приборы зонда рекомендуется оснас тить центрирующим прижимным устройст вом. Можно предусмотреть, чтобы при срабатывании прижима колеса отжимались от стенки скважины и фиксировались в корпусе прибора. Конструкцию можно выполнить так, чтобы колеса Прибора, распрложенные на разных уровнях (глубины скважины), отжимались .автономно. Такое устройство при поочередном отжимании колес позволяет переходить приборам зонда с одного диаметра обсадной трубы на другой без потери ориентации. Формула изобретения Многоприборный трехкомпонентный ориентируемый зонд, состоящий из нескольких соединенных кабелем приборов, каждый из которых содержит контейнер с сейсмоприемниками, систему дистанционной передачи угла и принудительной opиeнtaции контейнеров по азимуту относительно корпуса прибора, «отличающийся тем, что, с целью повышения надежности, упрощения конструкции и уменьшения стоимости многоприборного трехкомпонентного ориентируемого зонда, он снабжен развязывающими устройствами с датчиками угла, соединяющими приборы посредством металлорукава, а корпуса приборов снабжены не менее чем тремя группами направляющих колес, имеющих две степени свободы. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР If BftlGS, кл. G OVV 1/16, 1968. 2.Виноградов Ф.В. Некоторые результаты опробования скважинного трехкомпонентного сейсмоприемника с автоматической ориентировкой в сб. Поперечные и обменные волны в сейсморазведке, Н., Недра, 1967, l tl-litS. 3.Авторское свидетельство СССР по заявке № 2771.935/18-25, кл. G 01 V 1АО, 1979 (прототип).
лг
10
22
