Изобретение относится к области автоматического регулирования и может быть использовано в системе кондиционирования воздуха летательного аппарата (ЛА).
Известно, что для поддержания жизненных условий, необходимых для работы экипажа при полетах на больших высотах, в герметической кабине (ГК) искусственно поддерживаются необходимые абсолютное и избыточное давления, а также скорость изменения давления воздуха по времени. Требуемое давление воздуха в ГК поддерживается за счет его регулирования по определенной программе, которая устанавливает зависимость между давлением воздуха в кабине и высотой полета, [Дьяченко Ю.В., Спарин В.А., Чичиндаев А.В. Системы жизнеобеспечения летательных аппаратов: Учеб. Пособие для студентов вузов / Под ред. Ю.В. Дьяченко. - Новосибирск: Изд-во НГТУ, 2003, стр. 238].
В ГК скорость изменения давления зависит от режима работы регулятора давления, степени герметичности кабины или величины утечки из нее воздуха и скорости изменения подаваемого в кабину потока воздуха [Быков Л.Т., Егоров М.С., Тарасов П.В. Высотное оборудование самолетов, Государственное издательство оборонной промышленности, Москва, 1958, стр. 42]. Ограничения на допустимые пределы изменения давления определяются условиями обеспечения максимальной работоспособности членов экипажа, его безопасности с точки зрения физиолого-гигиенических факторов и прочности конструкции кабины. Абсолютное давление воздуха в кабине не должно быть меньше минимально допустимого давления  , где ΔPк - перепад давления между кабиной и атмосферой;
, где ΔPк - перепад давления между кабиной и атмосферой;  - минимально допустимое абсолютное давление воздуха в кабине. Скорость изменения давления воздуха в кабине не должна превышать допустимой скорости (
- минимально допустимое абсолютное давление воздуха в кабине. Скорость изменения давления воздуха в кабине не должна превышать допустимой скорости ( ). Избыточное давление воздуха в кабине не должно быть больше максимально допустимого (
). Избыточное давление воздуха в кабине не должно быть больше максимально допустимого ( ), отрицательный перепад давления воздуха между кабиной и атмосферой не должен быть больше допустимого значения (
), отрицательный перепад давления воздуха между кабиной и атмосферой не должен быть больше допустимого значения ( )
)  , [Ю.С. Илюшин, В.В. Олизаров. Системы обеспечения жизнедеятельности и спасения экипажей летательных аппаратов. - Издание ВВИА им. проф. Н.Е. Жуковского, 1972, стр. 36-39]. Из совокупности маневренных характеристик ЛА наибольшее влияние на скорость изменения давления воздуха в ГК оказывает вертикальная скорость (Vу), [Ю.С. Илюшин, В.В. Олизаров. Системы обеспечения жизнедеятельности и спасения экипажей летательных аппаратов. - Издание ВВИА им. проф. Н.Е. Жуковского, 1972, стр. 128].
, [Ю.С. Илюшин, В.В. Олизаров. Системы обеспечения жизнедеятельности и спасения экипажей летательных аппаратов. - Издание ВВИА им. проф. Н.Е. Жуковского, 1972, стр. 36-39]. Из совокупности маневренных характеристик ЛА наибольшее влияние на скорость изменения давления воздуха в ГК оказывает вертикальная скорость (Vу), [Ю.С. Илюшин, В.В. Олизаров. Системы обеспечения жизнедеятельности и спасения экипажей летательных аппаратов. - Издание ВВИА им. проф. Н.Е. Жуковского, 1972, стр. 128].
Известны способы регулирования давления воздуха в ГК ЛА, заключающиеся в поддержании давления в ГК в требуемых пределах за счет наддува атмосферного воздуха от компрессора авиадвигателя и сброса избыточного количества воздуха в атмосферу [Ю.С. Илюшин, В.В. Олизаров. Системы обеспечения жизнедеятельности и спасения экипажей летательных аппаратов. - Издание ВВИА им. проф. Н.Е. Жуковского, 1972, стр. 130, RU 2231483, МПК B64D 13/04].
Известны устройства регулирования давления воздуха в герметической кабине ЛА [SU 1003035, МПК G05D 16/20, RU 2216485, МПК B64D 13/00, G05D 16/00].
Недостатком известных способов и устройств является недостаточная эффективность регулирования давления воздуха в ГК ЛА (возможность выхода величин скорости изменения давления и абсолютного давления за пределы допустимых значений при резких изменениях высоты полета и вертикальных скоростей).
Наиболее близким из известных способов регулирования давления воздуха является способ по изобретению «Способ и система регулирования давления воздуха на летательном аппарате» [RU 2231483, МПК B64D 13/04, B64D 47/00], включающий измерение абсолютного и избыточного давлений воздуха в герметической кабине летательного аппарата, определение величин рассогласования заданного и измеренного значений абсолютного давления и избыточного давления воздуха в герметической кабине относительно атмосферного давления снаружи летательного аппарата и скорости изменения абсолютного давления воздуха в этой кабине, формирование управляющего воздействия для регулирования давления и регулировании давления воздуха в упомянутой кабине.
Наиболее близким к заявляемому из известных устройств является «Устройство регулирования давления в гермокабине летательного аппарата» [RU 2216485, МПК B64D 13/00, G05D 16/00], содержащее проточную часть, рабочий орган в виде заслонки, управляемый приводной системой с электродвигателем, устройство обратной связи по положению рабочего органа, блок датчиков давления с чувствительными элементами, арбитр, связанный с приводной системой и узлами контроля исправности, резервный канал, соединенный с обоими чувствительными элементами блока датчиков давления, с узлом контроля исправности и с арбитром, два контроллера мультиплексного канала информационного обмена, два интеллектуальных канала, связанных друг с другом через служебный канал информационного обмена, причем каждый интеллектуальный канал связан с рабочим органом через устройство обратной связи по положению рабочего органа, с обоими чувствительными элементами блока датчиков давления, с узлом контроля исправности, с арбитром и при помощи контроллера мультиплексного канала информационного обмена через мультиплексный канал информационного обмена - с бортовыми системами верхнего уровня, а также приводная система дополнительно снабжена вторым электродвигателем, а устройство обратной связи по положению рабочего органа состоит из двух каналов обратной связи, соединенных по входу с рабочим органом, а по выходу подключенных к интеллектуальному каналу.
Основной задачей данных способа и устройства также является поддержание давления в ГК в требуемых пределах. Регулирование давления осуществляется при помощи: регулятора подачи, осуществляющего принудительную подачу определенного количества свежего воздуха в ГК от компрессора авиационного двигателя; регулятора давления, осуществляющего регулирование давления воздуха за счет перепуска избыточного количества воздуха в окружающую среду через клапан перепуска воздуха.
На протяжении всего времени полета для обеспечения требующегося давления в ГК и сохранения скорости изменения давления в ней осуществляется регулирование давления по заданному закону. При существующей тенденции повышения маневренных характеристик современных и перспективных ЛА увеличивается диапазон используемых высот и скоростей. Известные способ и устройство не способны в этих условиях в полном объеме компенсировать перепад давлений при выполнении маневров на максимальных вертикальных скоростях в широком диапазоне высот, что обусловлено заложенными при их реализации техническими решениями. Применяющиеся на ЛА автоматические регуляторы подачи выполняются с пропорциональной характеристикой. То есть регулятор подачи состоит из измерительного элемента и регулирующего органа, которые связаны между собой промежуточным передаточным устройством. В качестве регулирующих органов используют дроссельные заслонки, регулирующие клапана и золотниковые устройства. В таких регуляторах изменение положения регулирующего органа пропорционально изменению регулируемого параметра [Быков Л.Т., Егоров М.С., Тарасов П.В. Высотное оборудование самолетов, Государственное издательство оборонной промышленности, Москва, 1958, стр. 219].
Регуляторы давления должны иметь определенные статические характеристики и обладать динамическими свойствами. Процесс регулирования давления в кабине должен быть динамически устойчивым, причем в переходных режимах скорость изменения давления в кабине не должна превосходить некоторой величины, задаваемой в соответствии с физиологическими нормами [Быков Л.Т., Егоров М.С., Тарасов П.В. Высотное оборудование самолетов, Государственное издательство оборонной промышленности, Москва, 1958, стр. 251].
При резком изменении высоты полета с большой вертикальной скоростью используемые регуляторы не могут своевременно отреагировать на эти изменения и в полной мере обеспечить необходимое количество воздуха в ГК. Следствием этого может стать снижение безопасности полетов при эксплуатации маневренных ЛА на пределе возможностей.
Задача изобретения - повышение точности регулирования давления воздуха в герметической кабине летательного аппарата.
Для решения поставленной задачи в известном способе регулирования давления воздуха на летательном аппарате, заключающемся в измерении абсолютного и избыточного давлений воздуха в герметической кабине летательного аппарата, определении величин рассогласования заданного и измеренного значений абсолютного давления и избыточного давления воздуха в герметической кабине относительно атмосферного давления снаружи летательного аппарата и скорости изменения абсолютного давления воздуха в этой кабине, формировании управляющего воздействия для регулирования давления и регулировании давления воздуха в упомянутой кабине, дополнительно измеряют угол отклонения рычага управления летательным аппаратом, рассчитывают высоту полета летательного аппарата через время τ после отклонения рычага управления летательным аппаратом и расчетную вертикальную скорость полета летательного аппарата для достижения расчетной высоты, вычисляют требуемое значение давления воздуха в герметической кабине на расчетной высоте полета летательного аппарата и необходимую скорость изменения давления для его достижения, сравнивают расчетную скорость изменения давления с предельно допустимой и, если расчетная скорость изменения давления больше предельно допустимой, осуществляют упреждающее регулирование давление воздуха в герметической кабине до расчетного значения.
Для решения поставленной задачи в известном устройстве для осуществления способа регулирования давления воздуха в ГК летательного аппарата, содержащем проточную часть, рабочий орган в виде заслонки, управляемый приводной системой с электродвигателем, устройство обратной связи по положению рабочего органа, блок датчиков давления с чувствительными элементами, арбитр, связанный с приводной системой и узлами контроля исправности, отличающемся тем, что введены резервный канал, соединенный с обоими чувствительными элементами блока датчиков давления, с узлом контроля исправности и с арбитром, два контроллера мультиплексного канала информационного обмена, два интеллектуальных канала, связанных друг с другом через служебный канал информационного обмена, причем каждый интеллектуальный канал связан с рабочим органом через устройство обратной связи по положению рабочего органа, с обоими чувствительными элементами блока датчиков давления, с узлом контроля исправности, с арбитром и при помощи контроллера мультиплексного канала информационного обмена через мультиплексный канал информационного обмена - с бортовыми системами верхнего уровня, а также приводная система дополнительно снабжена вторым электродвигателем, а устройство обратной связи по положению рабочего органа состоит из двух каналов обратной связи, соединенных по входу с рабочим органом, а по выходу подключенных к интеллектуальному каналу, согласно изобретению дополнительно введены блок управления, первый вход которого служит для поступления информации о параметрах полета, второй и третий вход которого служат для поступления информации об абсолютном и избыточном давлении в ГК соответственно, электронный коммутатор, первый и второй входы которого соединены с первым выходом блока управления, третий и четвертый входы соединены с соответствующими выходами арбитра, а пятый вход соединен с третьим выходом блока управления и является управляющим входом электронного коммутатора, первый и второй выходы электронного коммутатора подключены соответственно к входам первого и второго электродвигателей, электронный ключ, первый и второй входы которого соединены с вторым выходом блока управления, третий вход соединен с четвертым выходом блока управления и является управляющим входом электронного ключа, второй рабочий орган в виде заслонки, управляемый второй приводной системой с двумя электродвигателями, при этом первый и второй выходы электронного ключа соединены соответственно с входами первого и второго электродвигателей.
При изучении других известных технических решений в данной области техники указанная совокупность признаков, отличающая изобретение от прототипа, не была выявлена.
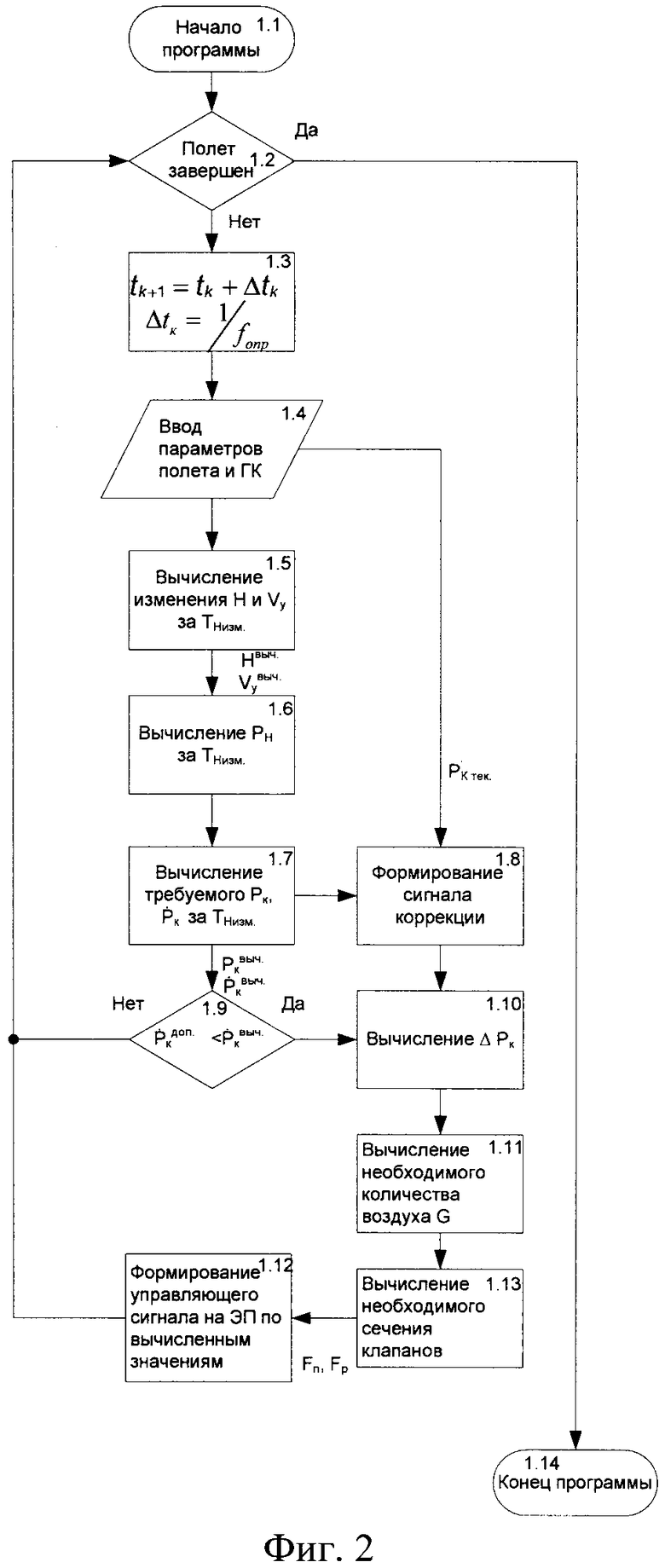
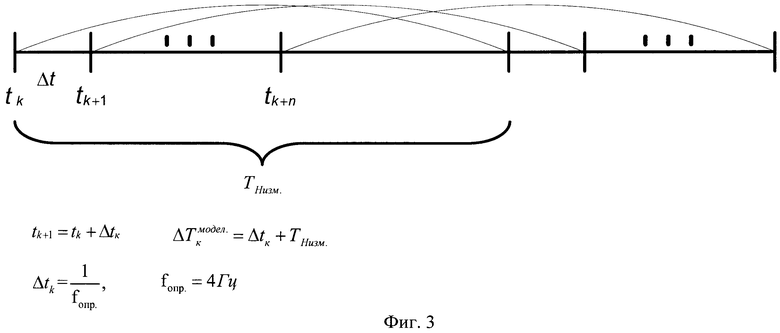
На фиг. 1 приведена структурная схема устройства для осуществления заявляемого способа, на фиг. 2 - алгоритм функционирования блока управления 1, на фиг. 3 - временная диаграмма, поясняющая выбор интервала времени моделирования.
На фиг. 1 приняты следующие обозначения:
1 - блок управления;
2 - электронный ключ;
3 - электронный коммутатор;
4 - 1-я приводная система;
4.1 - 1-й электродвигатель;
4.2 - 2-й электродвигатель;
5 - 2-я приводная система;
5.1 - 1-й электродвигатель;
5.2 - 2-й электродвигатель;
6 - арбитр;
7-9 - узлы контроля исправности;
10 - герметическая кабина;
11 - рабочий орган в виде заслонки;
12 - проточная часть;
13 - рабочий орган в виде заслонки;
14 - устройство обратной связи;
15, 19 - каналы обратной связи;
16, 23 - интеллектуальные каналы;
17, 25 - контроллеры мультиплексного канала информационного обмена;
18 - мультиплексный канал информационного обмена;
20 - служебный канал информационного обмена;
21 - системы верхнего уровня;
22 - блок датчиков давления;
24, 26 - чувствительные элементы;
27 - резервный канал.
На фиг. 2 приняты следующие обозначения:
блок 1.1 - начало программы;
блок 1.2 - организация цикла, завершение которого происходит при условии «Полет завершен»;
блок 1.3 - выбор интервала моделирования;
блок 1.4 - ввод параметров полета и герметической кабины;
блок 1.5 - вычисление изменения высоты и вертикальной скорости полета по отклонению ручки управления самолетом (РУС) за заданное время TНизм.;
блок 1.6 - вычисление изменения атмосферного давления PН за TНизм;
блок 1.7 - вычисление требуемого давления в ГК Pк, на вычисленной высоте H и необходимая для этого скорость изменения давления в ГК  .
.
блок 1.8 - формирование сигнала коррекции для создания необходимого давления;
блок 1.9 - сравнение вычисленной скорости изменения давления в ГК и допустимой по накладываемым ограничениям, по результатам сравнения выбирается дальнейшее управление;
блок 1.10 - вычисление рассогласования текущего давления в ГК и вычисленного;
блок 1.11 - вычисление необходимого количества воздуха для создания требуемого давления в ГК;
блок 1.12 - формирование управляющего сигнала на электроприводы;
блок 1.13 - вычисление необходимого сечения впускного и выпускного клапанов;
блок 1.14 - конец программы.
Устройство, поясняющее сущность заявляемого способа регулирования давления воздуха в ГК ЛА (фиг. 1), содержит проточную часть 12, первый рабочий орган в виде заслонки 11, управляемый первой приводной системой 4 с двумя электродвигателями 4.1, 4.2, устройство обратной связи 14 по положению рабочего органа 11, блок датчиков давления 22 с чувствительными элементами 24, 26 с соответствующими входами подачи воздуха, арбитр 6, связанный с узлами контроля исправности 7, 8, 9, резервный канал 27, соединенный с обоими чувствительными элементами 24, 26 блока датчиков давления 22, с узлом контроля исправности 9 и с арбитром 6, два контроллера мультиплексного канала информационного обмена 17, 25, два интеллектуальных канала 16, 23, связанных друг с другом через служебный канал информационного обмена 20, причем каждый интеллектуальный канал 16, 23 связан с рабочим органом 11 через устройство обратной связи 14 по положению рабочего органа 11, с обоими чувствительными элементами 24, 26 блока датчиков давления 22, с узлом контроля исправности 8, 7, с арбитром 6 и при помощи контроллера мультиплексного канала информационного обмена 17, 25 через мультиплексный канал информационного обмена 19 - с бортовыми системами верхнего уровня 21 с соответствующими входами для поступления информации о забортном атмосферном давлении, устройство обратной связи 14 по положению рабочего органа 11, состоящее из двух каналов обратной связи 15, 19, соединенных по входу с рабочим органом 11, а по выходу подключенных к интеллектуальному каналу 16, 23, блок управления 1, первый вход которого служит для поступления информации о параметрах полета, второй и третий вход которого служат для поступления информации об абсолютном и избыточном давлении в ГК соответственно, электронный коммутатор 3, первый и второй входы которого соединены с первым выходом блоком управления 1, третий и четвертый входы соединены с соответствующими выходами арбитра 6, а пятый вход соединен с третьим выходом блока управления 1 и является управляющим входом электронного коммутатора 3, первый и второй выходы электронного коммутатора 3 подключены соответственно к входам первого 4.1 и второго 4.2 электродвигателей, электронный ключ 2, первый и второй входы которого соединены со вторым выходом блока управления 1, третий вход соединен с четвертым выходом блока управления 1 и является управляющим входом электронного ключа 2, второй рабочий орган в виде заслонки 13, управляемый второй приводной системой 5 с двумя электродвигателями 5.1, 5.2, при этом первый и второй выходы электронного ключа 2 соединены соответственно с входами первого 5.1 и второго 5.2 электродвигателей.
Устройство, реализующее предложенный способ, работает следующим образом.
Принцип регулирования давления в ГК основан на контроле параметров полета, вычислении на заданный вперед интервал времени в зависимости от изменения РУС значений изменения высоты и вертикальной скорости полета, по полученным значениям вычислений необходимого давления в ГК и скорости его изменения и при ее отклонении от предельно допустимого значения - упреждающем изменении давления в ГК на интервал времени вычисления высоты полета за счет воздействия на заслонку регулятора подачи воздуха и на заслонку регулятора давления для выполнения требуемого закона изменения давления в ГК.
На первый вход блока управления 1 (который представляет собой бортовую цифровую вычислительную машину (БЦВМ), выполняющую вычислительные и управляющие функции) от системы воздушных сигналов (СВС) и датчика положения ручки (ДПР) подается информация о параметрах полета: H (текущая высота полета), Vпр (приборная скорость), Xв (приращение продольного отклонения РУС относительно балансировочного положения), Pатм. (атмосферное давление на текущей высоте полета), PКизб. (избыточное давление в ГК), PКабс. (абсолютное давление в ГК), информация о положении заслонок регулятора подачи (РП) и регулятора давления (РД). В блоке управления 1 через заданные интервалы времени вычисляется изменение высоты и вертикальной скорости полета, которое произойдет через определенное время после отклонения ручки управления самолетом. С использованием вычисленных значений реализуется алгоритм оценки допустимых пределов изменения давления в ГК на заданный вперед интервал времени в зависимости от параметров полета. Это производится следующим образом.
Информация о параметрах полета и ГК поступает в блок управления 1 с интервалом 0,25 с, величина которого определяется реакцией человека при восприятии информации, [RU Системы управления и бортовые цифровые вычислительные комплексы летательных аппаратов / Под редакцией Н.М. Лысенко. - М.: Изд. ВВИА им. проф. Н.Е. Жуковского, 1990, стр. 24].
Отклонение стабилизатора (руля высоты, отклонение которого приводит к изменению высоты) Δφz(tk) и скорость отклонения стабилизатора  для моментов времени tk определяются в блоке управления 1 по приращению отклонения РУС (ΔXв) путем численного решения уравнения, описывающего зависимость отклонения Δφz(tk) от отклонения РУС для продольного канала системы дистанционного управления (СДУ).
для моментов времени tk определяются в блоке управления 1 по приращению отклонения РУС (ΔXв) путем численного решения уравнения, описывающего зависимость отклонения Δφz(tk) от отклонения РУС для продольного канала системы дистанционного управления (СДУ).
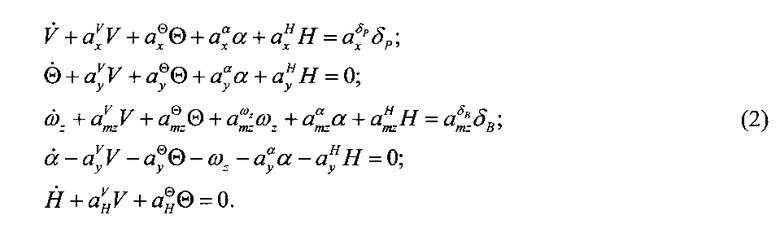
В соответствии с алгоритмом функционирования блока управления 1, фиг. 2 при отклонении (РУС), с использованием данных о параметрах полета и параметрах ГК (блок 1.4 на фиг. 2), в блоке управления 1 в соответствии с уравнениями пространственного положения летательного аппарата:
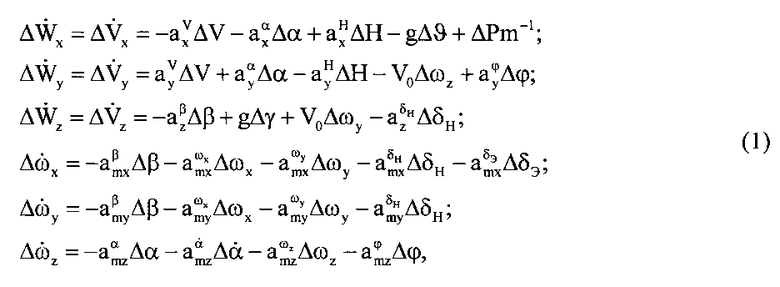
[Красовский А.А., Вавилов Ю.А., Сучков А.И. Системы автоматического управления летательного аппарата / Под редакцией Красовского А.А. - М.: Изд. ВВИА им. проф. Н.Е. Жуковского, 1986, стр. 36], при допущении линеаризованного продольного длиннопериодического движения летательного аппарата, вычисляются значения изменения высоты Hвыч. и вертикальной скорости полета  через TНизм. (фиг. 3) - время максимальной вертикальной скорости изменения высоты Hвыч. (блок 1.5 на фиг. 2):
через TНизм. (фиг. 3) - время максимальной вертикальной скорости изменения высоты Hвыч. (блок 1.5 на фиг. 2):
Интервал решения  выбирается на основании частоты дискретных измерений входного (управляющего) сигнала Δφz(tk), где
выбирается на основании частоты дискретных измерений входного (управляющего) сигнала Δφz(tk), где  , fonp - частота опроса отклонения РУС в продольном направлении, выбираемый по времени запаздывания реакции самолета после отклонения стабилизатора, равного четверти периода продольного движения, фиг. 3 [Системы управления и бортовые цифровые вычислительные комплексы летательных аппаратов / Под редакцией Н.М. Лысенко. - М.: Изд. ВВИА им. проф. Н.Е. Жуковского, 1990, стр. 208].
, fonp - частота опроса отклонения РУС в продольном направлении, выбираемый по времени запаздывания реакции самолета после отклонения стабилизатора, равного четверти периода продольного движения, фиг. 3 [Системы управления и бортовые цифровые вычислительные комплексы летательных аппаратов / Под редакцией Н.М. Лысенко. - М.: Изд. ВВИА им. проф. Н.Е. Жуковского, 1990, стр. 208].
Далее, в соответствии с математической моделью изменения давления атмосферы от изменения высоты dPH=-ρgmdH (блок 1.6 фиг. 2), вычисляется PН по полученным значениям высоты за установленный интервал ТН изм., основываясь на зависимости PH=f(Н), [ГОСТ 4401-73 «Стандартная атмосфера. Параметры» (СА-73), уравнении статики атмосферы, см. Авиационные приборы и навигационные системы. / Под редакцией Бабича О.А. - М.: Изд. ВВИА им. проф. Н.Е. Жуковского, 1981, стр. 112].
По вычисленным значениям высоты и вертикальной скорости полета на основании физиолого-гигиенических требований, предъявляемых к ГК [Быков Л.Т., Егоров М.С., Тарасов П.В. Высотное оборудование самолетов, Государственное издательство оборонной промышленности, Москва, 1958, стр. 41-42], с использованием математической модели изменения давления  и скорости изменения давления
и скорости изменения давления  воздуха в кабине
воздуха в кабине

где A и B - постоянные коэффициенты;
вычисляется необходимое значение для вычисленной высоты за время ТН изм. и для его создания (блок 1.7 фиг. 2).
Таким образом, в течение всего полета в блоке управления 1 каждые 250 мс осуществляется контроль параметров полета с целью принятия решения по варианту регулирования (воздействию на те или иные исполнительные устройства) давления воздуха в ГК. Такое решение принимается следующим образом.
Сравнивается вычисленная скорость изменения давления в кабине и допустимая в зависимости от выполняемого маневра (блок 1.9 фиг. 2). При условии  регулирование подачи воздуха через впускной клапан не требуется, так как количество воздуха, подаваемое в ГК, полностью удовлетворяет условию создания требуемого давления. Регулирование давления согласно заданному закону полностью осуществляет регулятор давления. При этом электронный ключ 2 по сигналу с 4-го выхода блока управления 1 находится в закрытом состоянии, и управление заслонками регулятора подачи не производится. Подача воздуха в ГК осуществляется постоянно, в зависимости от режима полета. По сигналу с 3-го выхода блока управления 1 выходы арбитра подключены электронным коммутатором 3 к соответствующим входам управления электроприводами 4.1, 4.2 и регулирование давления в ГК производится посредством изменения положения заслонки выпускного клапана 11 и, следовательно, объема выпускаемого в атмосферу воздуха аналогично, как это осуществляется в прототипе следующим образом.
регулирование подачи воздуха через впускной клапан не требуется, так как количество воздуха, подаваемое в ГК, полностью удовлетворяет условию создания требуемого давления. Регулирование давления согласно заданному закону полностью осуществляет регулятор давления. При этом электронный ключ 2 по сигналу с 4-го выхода блока управления 1 находится в закрытом состоянии, и управление заслонками регулятора подачи не производится. Подача воздуха в ГК осуществляется постоянно, в зависимости от режима полета. По сигналу с 3-го выхода блока управления 1 выходы арбитра подключены электронным коммутатором 3 к соответствующим входам управления электроприводами 4.1, 4.2 и регулирование давления в ГК производится посредством изменения положения заслонки выпускного клапана 11 и, следовательно, объема выпускаемого в атмосферу воздуха аналогично, как это осуществляется в прототипе следующим образом.
Воздух с уровнем давления в отсеке сброса воздуха Pн и воздух с уровнем давления в ГК Pк поступают в чувствительный элемент 26 для измерения избыточного давления в кабине. Воздух с уровнем давления в ГК Pк также поступает в чувствительный элемент 24 для измерения абсолютного давления в ГК. Давление воздуха в сообщающемся с атмосферой отсеке сброса воздуха незначительно отличается от забортного атмосферного давления Pн. Блок датчиков давления 22 преобразует уровни давления Pн и Pк в электрический информационный сигнал об уровне давления в ГК Pк и в электрический информационный сигнал об уровне избыточного давления ГК  , соответственно, равного разности абсолютных давлений в ГК и в отсеке сброса. Сигналы об уровнях и Pк транслируются параллельно в резервный канал (РК) 27 и в два дублирующих интеллектуальных канала (ИК) 16, 23.
, соответственно, равного разности абсолютных давлений в ГК и в отсеке сброса. Сигналы об уровнях и Pк транслируются параллельно в резервный канал (РК) 27 и в два дублирующих интеллектуальных канала (ИК) 16, 23.
На основании информации о текущих значениях абсолютного давления Pк и избыточного давления в ГК, получаемых от блока датчиков давления 22, информации о величине проходного сечения F проточной части 12, получаемой от соответствующего канала устройства обратной связи по положению рабочего органа 14 и информации о величине забортного атмосферного давления Pн, получаемой каждым из ПК 16, 23 из бортовых систем верхнего уровня 21 по мультиплексному каналу информационного обмена (МКИО) 18 с помощью соответствующего контроллера МКИО 17 или 25, каждый из ИК 16, 23 независимо друг от друга вычисляет текущий расход G через проточную часть 12.
Оба ИК независимо друг от друга по двум последовательно измеренным за интервал времени Δt значениям абсолютного давления в ГК Pк(i-1) и Pк(i) и вычисленному значению расхода из ГК Gpac вычисляют текущий расход воздуха, подаваемого в ГК Gпод. По полученной от систем верхнего уровня 21 информации о величине забортного атмосферного давления Pн ИК 16, 23 вычисляют требуемое абсолютное давление в ГК PКтреб., а по значениям PКтреб., Pн и Gпод вычисляют требуемую величину проходного сечения проточной части 12 и оценивают отсутствие превышения предельной скорости изменения давления в ГК, после чего ИК 16, 23 выдают команды управления одновременно обоими электроприводами 4.1, 4.2 приводной системой 4 в соответствии с принятым законом регулирования давления. РК 27 по сигналам от блока датчиков давления 22 также выдает команды управления приводной системой 4. Арбитр 6 по информации о работоспособности ИК 16, 23 и РК 27, получаемой с помощью соответствующих узлов контроля исправности 7, 8 и 9, выбирает один ведущий на данный момент канал и преобразует его команды управления в сигналы управления электроприводами 4.1, 4.2.
При возникновении во время полета (допустим, в момент времени tк, фиг. 3) условия, когда вычисленная скорость изменения давления в кабине на заданный вперед интервал времени превышает допустимую  , например, при выполнении маневров высшего пилотажа с резким набором высоты с большой вертикальной скоростью, блок управления 1 принимает решение на упреждающее регулирование давления воздуха в ГК путем управления заслонкой регулятора давления и управлением заслонкой регулятора подачи. При этом с 3-го и 4-го выходов блока управления 1 поступают управляющие сигналы, соответственно, на 5-й (управляющий) вход электронного коммутатора 3 (переключающий управление сбросом воздуха в атмосферу с арбитра на блок управления 1) и на 3-й (управляющий) вход электронного ключа 2 на подключение канала управления заслонками регулятора подачи и регулятора давления.
, например, при выполнении маневров высшего пилотажа с резким набором высоты с большой вертикальной скоростью, блок управления 1 принимает решение на упреждающее регулирование давления воздуха в ГК путем управления заслонкой регулятора давления и управлением заслонкой регулятора подачи. При этом с 3-го и 4-го выходов блока управления 1 поступают управляющие сигналы, соответственно, на 5-й (управляющий) вход электронного коммутатора 3 (переключающий управление сбросом воздуха в атмосферу с арбитра на блок управления 1) и на 3-й (управляющий) вход электронного ключа 2 на подключение канала управления заслонками регулятора подачи и регулятора давления.
Для обеспечения процесса регулирования давления в блоке управления 1 в соответствии с реализуемым им алгоритмом (фиг. 2) вычисляется необходимое давление ΔPк в ГК, которое требуется создать к моменту времени ТН изм. (фиг. 3), как разность текущего давления в ГК и вычисленного, согласно реализуемой математической модели (3), (блок 1.10 фиг. 2).
Далее блоком управления 1 вычисляется необходимое количество воздуха G, для обеспечения создания ΔPк как функция
 ,
,
[Быков Л.Т., Егоров М.С., Тарасов П.В. Высотное оборудование самолетов, Государственное издательство оборонной промышленности, Москва, 1958, стр. 203],
где P1 - давление воздуха перед регулятором подачи, Т1 - температура перед регулятором подачи, Тк - температура воздуха в ГК (блок 1.11 фиг. 2).
Температура Тк для ГК является параметром, относительное изменение величины которого для данного устройства является незначительным и принята усредненной константе. Исходя из этого
 .
.
По вычисленному значению GП блоком управления 1 определяется необходимое количество воздуха (т.е. сечение клапанов) для создания требуемого давления с наложенными ограничениями по скорости изменения давления воздуха (блок 1.13 фиг. 2). Площадь проходного сечения регулирующего органа подачи FП вычисляется как функция
 ,
,
[Илюшин Ю.С., Олизаров В.В. Системы обеспечения жизнедеятельности и спасения экипажей летательных аппаратов. Издание ВВИА им. проф. Н.Е. Жуковского, 1972, стр. 152-154].
В соответствии с полученным результатом блок управления 1 подает команду на электроприводы 4 и 5, на установку требуемых положений рабочих органов впускного и выпускного клапанов (блок 1.12 фиг. 2).
На входы 2 и 3 блока управления 1 поступают сигналы с выходов чувствительных элементов 24, 26 соответственно, о значениях PКизб. (избыточное давление в ГК) и PКабс. (абсолютное давление в ГК). Сравнивая давление, полученное от чувствительных элементов, с рассчитываемым, определяется значение рассогласования заданного давления с текущим (блок 1.8 фиг. 2). При вычислении ΔPк (блок 1.10 фиг. 2), учитывается значение рассогласования (блок 1.8 фиг. 2), для уменьшения появляющейся ошибки при создании требуемого давления в ГК.
Таким образом, заявляемые способ и устройство за счет периодического контроля параметров полета, определения на заданный вперед интервал времени значений изменения высоты и вертикальной скорости полета, и в соответствии с полученными значениями - необходимого давления в ГК и скорости его изменения позволяет упреждающе произвести изменение давления в ГК на указанный интервал времени за счет воздействия на заслонку регулятора подачи воздуха и на заслонку регулятора давления для выполнения требуемого закона изменения давления в ГК и повысить точность регулирования давления воздуха в герметической кабине летательного аппарата.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ ВОЗДУХА В ГЕРМЕТИЧЕСКОЙ КАБИНЕ ПРИ ЕЕ РАЗГЕРМЕТИЗАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2581892C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ ВОЗДУХА В ГЕРМЕТИЧЕСКОЙ КАБИНЕ ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ОСОБЫХ УСЛОВИЯХ ПОЛЕТА | 2020 |
|
RU2755950C1 |
| УСТРОЙСТВО РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ В ГЕРМОКАБИНЕ ЛЕТАТЕЛЬНОГО АППАРАТА | 2001 |
|
RU2216485C2 |
| КОМПЛЕКСНАЯ СИСТЕМА КОНДИЦИОНИРОВАНИЯ ВОЗДУХА ЛЕТАТЕЛЬНОГО АППАРАТА | 2017 |
|
RU2682758C1 |
| СПОСОБ КОМПЕНСАЦИИ ИНСТРУМЕНТАЛЬНЫХ ПОГРЕШНОСТЕЙ БЕСПЛАТФОРМЕННЫХ ИНЕРЦИАЛЬНЫХ НАВИГАЦИОННЫХ СИСТЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2362977C1 |
| СПОСОБ КОСМИЧЕСКОЙ НАВИГАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2378617C1 |
| ЛЕГКИЙ СВЕРХЗВУКОВОЙ МНОГОЦЕЛЕВОЙ САМОЛЕТ | 2004 |
|
RU2271305C1 |
| СПОСОБ И СИСТЕМА РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ ВОЗДУХА НА ЛЕТАТЕЛЬНОМ АППАРАТЕ | 2003 |
|
RU2231483C1 |
| Устройство управления системой кондиционирования воздуха летательного аппарата | 2015 |
|
RU2617160C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИНСТРУМЕНТАЛЬНЫХ ПОГРЕШНОСТЕЙ ИЗМЕРИТЕЛЕЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ НА ЭТАПЕ НАЧАЛЬНОЙ ВЫСТАВКИ | 2005 |
|
RU2300081C1 |
Группа изобретений относится к способу регулирования давления воздуха в герметической кабине летательного аппарата (ЛА) и системе, осуществляющей этот способ. Для регулирования давления воздуха в герметической кабине ЛА измеряют абсолютное и избыточное давление воздуха в кабине ЛА и значение величин рассогласования заданных и измеренных значений относительно атмосферного давления снаружи ЛА, измеряют скорость изменения абсолютного давления воздуха в кабине, измеряют угол отклонения рычага управления летательным аппаратом, определяют высоту полета и расчетную вертикальную скорость полета ЛА для достижения расчетной высоты через определенное время после отклонения рычага, вычисляют требуемое значение давления воздуха в кабине и необходимую скорость изменения давления, производят упреждающее регулирование давления воздуха в случае превышения изменения давления допустимого значения. Устройство регулирования давления содержит проточную часть, два рабочих органа в виде заслонки, две приводные системы с двумя электродвигателями каждая, устройство обратной связи по положения рабочего органа с двумя каналами, блок датчиков давления с двумя чувствительными элементами, арбитр, узлы контроля исправности, резервный канал, два контроллера мультиплексного канала, два интеллектуальных канала, блок управления, электронный коммутатор, соединенные определенным образом. Обеспечивается поддержание давления в герметической кабине в допустимых пределах. 2 н.п. ф-лы, 3 ил.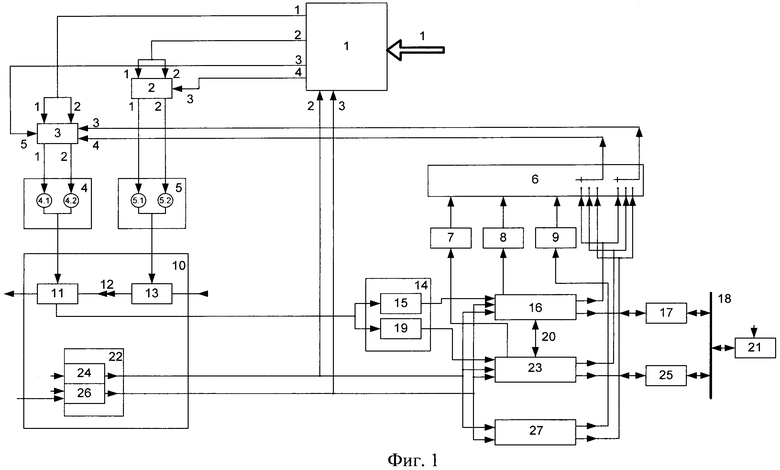
1. Способ регулирования давления воздуха в герметической кабине летательного аппарата, основанный на измерении абсолютного и избыточного давлений воздуха в герметической кабине летательного аппарата, определении величин рассогласования заданного и измеренного значений абсолютного давления и избыточного давления воздуха в герметической кабине относительно атмосферного давления снаружи летательного аппарата и скорости изменения абсолютного давления воздуха в этой кабине, формировании управляющего воздействия для регулирования давления и регулировании давления воздуха в упомянутой кабине, отличающийся тем, что дополнительно измеряют угол отклонения рычага управления летательным аппаратом, рассчитывают высоту полета летательного аппарата через время τ после отклонения рычага управления летательным аппаратом и расчетную вертикальную скорость полета летательного аппарата для достижения расчетной высоты, вычисляют требуемое значение давления воздуха в герметической кабине на расчетной высоте полета летательного аппарата и необходимую скорость изменения давления для его достижения, сравнивают расчетную скорость изменения давления с предельно допустимой и, если расчетная скорость изменения давления больше предельно допустимой, осуществляют упреждающее регулирование давление воздуха в герметической кабине до расчетного значения.
2. Устройство регулирования давления воздуха в герметической кабине летательного аппарата, содержащее проточную часть, первый рабочий орган в виде заслонки, управляемый первой приводной системой с двумя электродвигателями, устройство обратной связи по положению рабочего органа, блок датчиков давления с чувствительными элементами с соответствующими входами подачи воздуха, арбитр, связанный с узлами контроля исправности, резервный канал, соединенный с обоими чувствительными элементами блока датчиков давления, с узлом контроля исправности и с арбитром, два контроллера мультиплексного канала информационного обмена, два интеллектуальных канала, связанных друг с другом через служебный канал информационного обмена, причем каждый интеллектуальный канал связан с рабочим органом через устройство обратной связи по положению рабочего органа, с обоими чувствительными элементами блока датчиков давления, с узлом контроля исправности, с арбитром и при помощи контроллера мультиплексного канала информационного обмена через мультиплексный канал информационного обмена - с бортовыми системами верхнего уровня с соответствующими входами для поступления информации о забортном атмосферном давлении, устройство обратной связи по положению рабочего органа, состоящее из двух каналов обратной связи, соединенных по входу с рабочим органом, а по выходу подключенных к интеллектуальному каналу, отличающееся тем, что дополнительно введены блок управления, первый вход которого служит для поступления информации о параметрах полета, второй и третий вход которого служат для поступления информации об абсолютном и избыточном давлении в герметической кабине соответственно, электронный коммутатор, первый и второй входы которого соединены с первым выходом блока управления, третий и четвертый входы соединены с соответствующими выходами арбитра, а пятый вход соединен с третьим выходом блока управления и является управляющим входом электронного коммутатора, первый и второй выходы электронного коммутатора подключены соответственно к входам первого и второго электродвигателей, электронный ключ, первый и второй входы которого соединены с вторым выходом блока управления, третий вход соединен с четвертым выходом блока управления и является управляющим входом электронного ключа, второй рабочий орган в виде заслонки, управляемый второй приводной системой с двумя электродвигателями, при этом первый и второй выходы электронного ключа соединены соответственно с входами первого и второго электродвигателей.
| УСТРОЙСТВО РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ В ГЕРМОКАБИНЕ ЛЕТАТЕЛЬНОГО АППАРАТА | 2001 |
|
RU2216485C2 |
| СПОСОБ И СИСТЕМА РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ ВОЗДУХА НА ЛЕТАТЕЛЬНОМ АППАРАТЕ | 2003 |
|
RU2231483C1 |
| US 4164896 A1, 21.08.1979 | |||
| WO 2005070764 A1, 04.08.2005. | |||

