Изобретение относится к области автоматического регулирования и может быть использовано в системе кондиционирования воздуха летательного аппарата (ЛА).
Известно, что для поддержания жизненных условий, необходимых для работы экипажа при полетах на больших высотах, в герметической кабине (ГК) искусственно поддерживаются необходимые абсолютное и избыточное давления, а также скорость изменения давления воздуха по времени. Требуемое давление воздуха в ГК поддерживается за счет его регулирования по определенной программе, которая устанавливает зависимость между давлением воздуха в кабине и высотой полета [Дьяченко Ю.В., Спарин В.А., Чичиндаев А.В. Системы жизнеобеспечения летательных аппаратов: Учеб. пособие для студентов вузов / Под ред. Ю.В. Дьяченко. - Новосибирск: Изд-во НГТУ, 2003, стр. 238].
В ГК скорость изменения давления зависит от режима работы регулятора давления, степени герметичности кабины или величины утечки из нее воздуха и скорости изменения подаваемого в кабину потока воздуха [Быков Л.Т., Егоров М.С., Тарасов П.В. Высотное оборудование самолетов, Государственное издательство оборонной промышленности, Москва, 1958, стр. 42]. Ограничения на допустимые пределы изменения давления определяются условиями обеспечения максимальной работоспособности членов экипажа, его безопасности с точки зрения физиолого-гигиенических факторов и прочности конструкции кабины. Абсолютное давление воздуха в кабине не должно быть меньше минимально допустимого давления  , где Рн - атмосферное давление воздуха на высоте полета; ΔРк - перепад давления между кабиной и атмосферой;
, где Рн - атмосферное давление воздуха на высоте полета; ΔРк - перепад давления между кабиной и атмосферой;  - минимально допустимое абсолютное давление воздуха в кабине. Скорость изменения давления воздуха в кабине не должна превышать допустимой скорости
- минимально допустимое абсолютное давление воздуха в кабине. Скорость изменения давления воздуха в кабине не должна превышать допустимой скорости  . Избыточное давление воздуха в кабине не должно быть больше максимально допустимого
. Избыточное давление воздуха в кабине не должно быть больше максимально допустимого  , отрицательный перепад давления воздуха между кабиной и атмосферой не должен быть больше допустимого значения
, отрицательный перепад давления воздуха между кабиной и атмосферой не должен быть больше допустимого значения  ,
,  [Ю.С. Илюшин, В.В. Олизаров. Системы обеспечения жизнедеятельности и спасения экипажей летательных аппаратов. - Издание ВВИА им. проф. Н.Е. Жуковского, 1972, стр. 36-39].
[Ю.С. Илюшин, В.В. Олизаров. Системы обеспечения жизнедеятельности и спасения экипажей летательных аппаратов. - Издание ВВИА им. проф. Н.Е. Жуковского, 1972, стр. 36-39].
Известны способы регулирования давления воздуха в ГК ЛА, заключающиеся в поддержании давления в ГК в требуемых пределах за счет наддува атмосферного воздуха от компрессора авиадвигателя и сброса избыточного количества воздуха в атмосферу [Ю.С. Илюшин, В.В. Олизаров. Системы обеспечения жизнедеятельности и спасения экипажей летательных аппаратов. - Издание ВВИА им. проф. Н.Е. Жуковского, 1972, стр. 130, RU 2231483, МПК B64D 13/04].
Известны устройства регулирования давления воздуха в герметической кабине ЛА [SU 1003035, МПК G05D 16/20, RU 2216485, МПК B64D 13/00, G05D 16/00].
Недостатком известных способов и устройств является недостаточная эффективность регулирования давления воздуха в ГК ЛА (возможность выхода величин скорости изменения давления и абсолютного давления за пределы допустимых значений при разгерметизации кабины).
Наиболее близким к заявляемому из известных способов регулирования давления воздуха является способ по изобретению «Способ и система регулирования давления воздуха на летательном аппарате» [RU 2231483, МПК B64D 13/04, B64D 47/00], включающий измерение абсолютного и избыточного давлений воздуха в герметической кабине, определение величин рассогласования заданного и измеренного значений абсолютного давления и избыточного давления воздуха в герметической кабине относительно атмосферного давления и скорости изменения абсолютного давления воздуха в этой кабине и при наличии рассогласования - формирование управляющего воздействия и регулирование давления воздуха в упомянутой кабине.
Наиболее близким к заявляемому из известных устройств является «Устройство регулирования давления в гермокабине летательного аппарата» [RU 2216485, МПК B64D 13/00, G05D 16/00], содержащее проточную часть, первый рабочий орган в виде заслонки, управляемый первой приводной системой с двумя электродвигателями, устройство обратной связи по положению рабочего органа, блок датчиков давления с чувствительными элементами с соответствующими входами подачи воздуха, арбитр, связанный с узлами контроля исправности, резервный канал, соединенный с обоими чувствительными элементами блока датчиков давления, с узлом контроля исправности и с арбитром, два контроллера мультиплексного канала информационного обмена, два интеллектуальных канала, связанных друг с другом через служебный канал информационного обмена, причем каждый интеллектуальный канал связан с рабочим органом через устройство обратной связи по положению рабочего органа, с обоими чувствительными элементами блока датчиков давления, с узлом контроля исправности, с арбитром и при помощи контроллера мультиплексного канала информационного обмена через мультиплексный канал информационного обмена - с бортовыми системами верхнего уровня с соответствующими входами для поступления информации о забортном атмосферном давлении, устройство обратной связи по положению рабочего органа, состоящее из двух каналов обратной связи, соединенных по входу с рабочим органом, а по выходу подключенных к интеллектуальному каналу.
Основной задачей данных способа и устройства является поддержание давления в ГК в требуемых пределах. Регулирование давления осуществляется при помощи: регулятора подачи, осуществляющего принудительную подачу определенного количества свежего воздуха в ГК от компрессора авиационного двигателя; регулятора давления, осуществляющего регулирование давления воздуха за счет перепуска избыточного количества воздуха в окружающую среду через клапан перепуска воздуха. На протяжении всего времени полета, для обеспечения требуемого давления воздуха в ГК и сохранения скорости его изменения в допустимых пределах, осуществляется регулирование давления по заданному закону.
Регуляторы давления должны иметь определенные статические характеристики (зависимость поддерживаемого регулятором давления в кабине давления от высоты полета и расхода протекающего через него воздуха) и обладать динамическими свойствами. Процесс регулирования давления в кабине должен быть динамически устойчивым, причем в переходных режимах скорость изменения давления в кабине не должна превосходить некоторой величины, задаваемой в соответствии с физиологическими нормами [Быков Л.Т., Егоров М.С., Тарасов П.В. Высотное оборудование самолетов, Государственное издательство оборонной промышленности, Москва, 1958, стр. 251].
Применяющиеся на ЛА автоматические регуляторы подачи выполняются с пропорциональной характеристикой. В качестве регулирующих органов используют дроссельные заслонки, регулирующие клапаны и золотниковые устройства. Основным недостатком является зависимость величины подачи воздуха от режима работы двигателя [Быков Л.Т., Егоров М.С., Тарасов П.В. Высотное оборудование самолетов, Государственное издательство оборонной промышленности, Москва, 1958, стр. 67, 219].
Известные способ и устройство также не способны в полном объеме обеспечить поддержание давления воздуха в ГК и безопасную скорость его изменения в заданных пределах, что обусловлено заложенными при их реализации техническими решениями. Выход параметров регулирования давления воздуха в ГК за допустимые значения отрицательно влияет на физическое состояние экипажа ЛА, что может привести к невыполнению полетного задания или к развитию аварийной ситуации в полете.
Задача изобретения - повышение точности регулирования давления воздуха в герметической кабине летательного аппарата при ее разгерметизации.
Для решения поставленной задачи в известном способе регулирования давления воздуха на летательном аппарате, заключающемся в измерении абсолютного и избыточного давлений воздуха в герметической кабине, определении величин рассогласования заданного и измеренного значений абсолютного давления и избыточного давления воздуха в герметической кабине относительно атмосферного давления и скорости изменения абсолютного давления воздуха в этой кабине и при наличии рассогласования - формировании управляющего воздействия и регулировании давления воздуха в упомянутой кабине, дополнительно сравнивают текущую скорость изменения давления в кабине с предельно допустимой, и если текущая скорость изменения давления будет больше предельно допустимого значения, то осуществляют принудительное регулирование давления воздуха в герметической кабине.
Для решения поставленной задачи в известное устройство для осуществления способа регулирования давления воздуха в ГК при ее разгерметизации, содержащее проточную часть, первый рабочий орган в виде заслонки, управляемый первой приводной системой с двумя электродвигателями, устройство обратной связи по положению рабочего органа, блок датчиков давления с чувствительными элементами с соответствующими входами подачи воздуха, арбитр, связанный с узлами контроля исправности, резервный канал, соединенный с обоими чувствительными элементами блока датчиков давления, с узлом контроля исправности и с арбитром, два контроллера мультиплексного канала информационного обмена, два интеллектуальных канала, связанных друг с другом через служебный канал информационного обмена, причем каждый интеллектуальный канал связан с рабочим органом через устройство обратной связи по положению рабочего органа, с обоими чувствительными элементами блока датчиков давления, с узлом контроля исправности, с арбитром и при помощи контроллера мультиплексного канала информационного обмена через мультиплексный канал информационного обмена - с бортовыми системами верхнего уровня с соответствующими входами для поступления информации о забортном атмосферном давлении, устройство обратной связи по положению рабочего органа, состоящее из двух каналов обратной связи, соединенных по входу с рабочим органом, а по выходу подключенных к интеллектуальному каналу, дополнительно введены блок управления, первый вход которого служит для поступления информации об атмосферном давлении полета, второй и третий входы которого соединены с выходами соответствующих чувствительных элементов блока датчиков давления и служат для поступления информации об абсолютном и избыточном давлении в герметической кабине соответственно, электронный коммутатор, первый и второй входы которого соединены с первым выходом блока управления, третий и четвертый входы соединены с соответствующими выходами арбитра, а пятый вход соединен с третьим выходом блока управления и является управляющим входом электронного коммутатора, первый и второй выходы электронного коммутатора подключены соответственно к входам первого и второго электродвигателей, электронный ключ, первый и второй входы которого соединены со вторым выходом блока управления, третий вход соединен с четвертым выходом блока управления и является управляющим входом электронного ключа, второй рабочий орган в виде заслонки, управляемый второй приводной системой с двумя электродвигателями, при этом первый и второй выходы электронного ключа соединены соответственно с входами первого и второго электродвигателей.
При изучении других известных технических решений в данной области техники указанная совокупность признаков, отличающая изобретение от прототипа, не была выявлена.
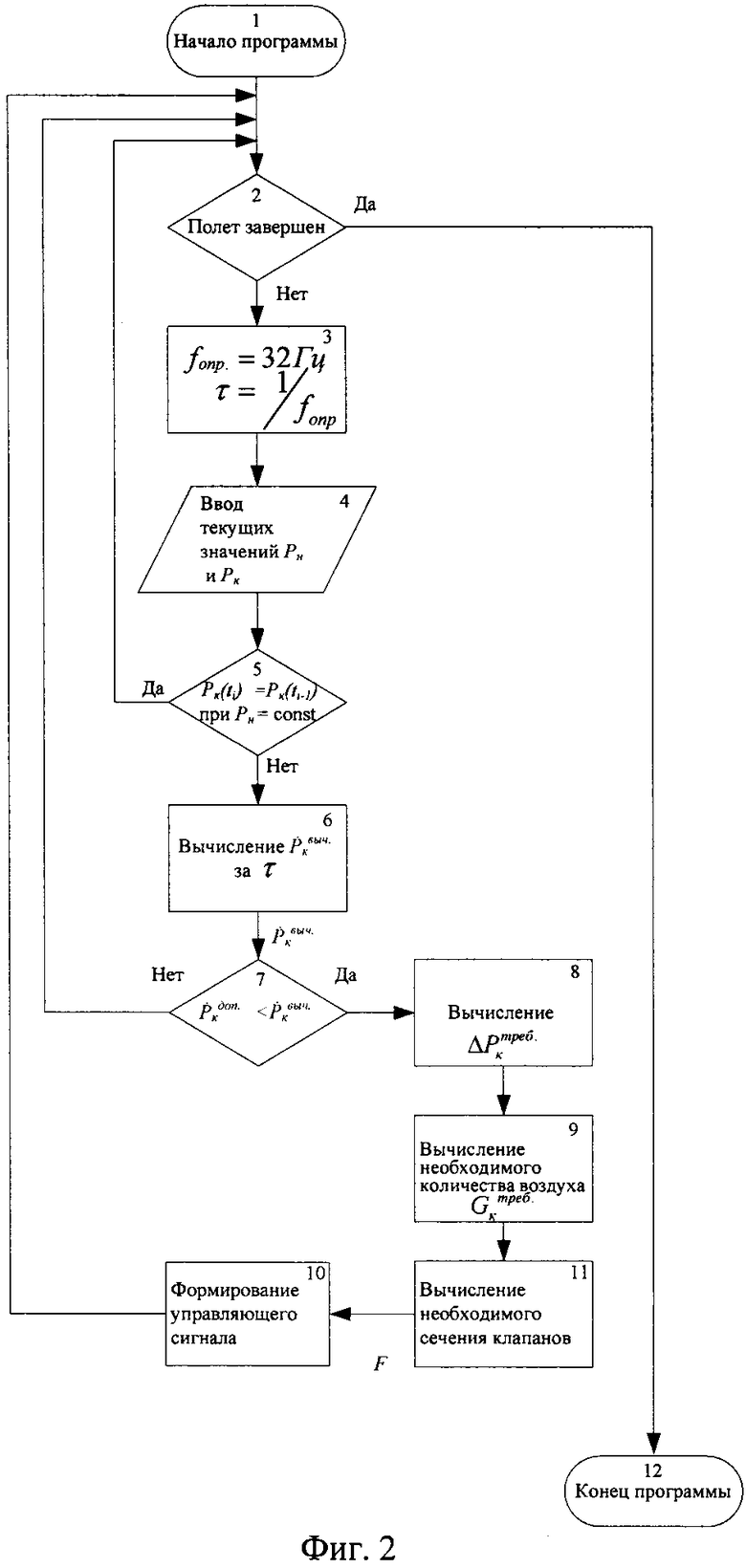
На фиг. 1 приведена структурная схема устройства для осуществления заявляемого способа, на фиг. 2 - алгоритм функционирования блока управления 1.
На фиг. 1 приняты следующие обозначения:
1 - блок управления;
2 - электронный ключ;
3 - электронный коммутатор;
4 - 1-я приводная система;
4.1 - 1-й электродвигатель;
4.2 - 2-й электродвигатель;
5 - 2-я приводная система;
5.1 - 1-й электродвигатель;
5.2 - 2-й электродвигатель;
6 - арбитр;
7-9 - узлы контроля исправности;
10 - герметическая кабина;
11 - рабочий орган в виде заслонки;
12 - проточная часть;
13 - рабочий орган в виде заслонки;
14 - устройство обратной связи;
15, 19 - каналы обратной связи;
16, 23 - интеллектуальные каналы;
17, 25 - контроллеры мультиплексного канала информационного обмена;
18 - мультиплексный канал информационного обмена;
20 - служебный канал информационного обмена;
21 - системы верхнего уровня;
22 - блок датчиков давления;
24, 26 - чувствительные элементы;
27 - резервный канал.
На фиг. 2 приняты следующие обозначения:
блок 1 - начало программы;
блок 2 - организация цикла, завершение которого происходит при условии «Полет завершен»;
блок 3 - выбор частоты опроса датчиков давления (интервала вычисления);
блок 4 - ввод текущих значений Рн и Рк;
блок 5 - сравнение текущего значения Рк(ti) с предыдущим Рк(ti-1), при неизменной высоте полета, по результатам сравнения выбирается вариант регулирования давления;
блок 6 - вычисление скорости изменения давления в кабине 
блок 7 - сравнение вычисленной скорости изменения давления в ГК и допустимой по накладываемым ограничениям, по результатам сравнения выбирается вариант регулирования давления;
блок 8 - вычисление рассогласования текущего давления Рк(ti) в ГК и предыдущего Рк(ti-1);
блок 9 - вычисление необходимого количества воздуха для создания требуемого давления в ГК;
блок 10 - формирование управляющего сигнала на электроприводы;
блок 11 - вычисление необходимого сечения впускного и выпускного клапанов;
блок 12 - конец программы.
Устройство, поясняющее сущность заявляемого способа регулирования давления воздуха в ГК при ее разгерметизации (фиг. 1), содержит проточную часть 12, первый рабочий орган в виде заслонки 11, управляемый первой приводной системой 4 с двумя электродвигателями 4.1, 4.2, устройство обратной связи 14 по положению рабочего органа 11, блок датчиков давления 22 с чувствительными элементами 24, 26 с соответствующими входами подачи воздуха, арбитр 6, связанный с узлами контроля исправности 7, 8, 9, резервный канал 27, соединенный с обоими чувствительными элементами 24, 26 блока датчиков давления 22, с узлом контроля исправности 9 и с арбитром 6, два контроллера мультиплексного канала информационного обмена 17, 25, два интеллектуальных канала 16, 23, связанных друг с другом через служебный канал информационного обмена 20, причем каждый интеллектуальный канал 16, 23 связан с рабочим органом 11 через устройство обратной связи 14 по положению рабочего органа 11, с обоими чувствительными элементами 24, 26 блока датчиков давления 22, с узлом контроля исправности 8, 7, с арбитром 6 и при помощи контроллера мультиплексного канала информационного обмена 17, 25 через мультиплексный канал информационного обмена 19 - с бортовыми системами верхнего уровня 21 с соответствующими входами для поступления информации о забортном атмосферном давлении, устройство обратной связи 14 по положению рабочего органа 11 состоящее из двух каналов обратной связи 15, 19, соединенных по входу с рабочим органом 11, а по выходу подключенных к интеллектуальному каналу 16, 23, блок управления 1, первый вход которого служит для поступления информации об атмосферном давлении полета, второй и третий входы которого соединены с выходами соответствующих чувствительных элементов 24, 26 блока датчиков давления 22 и служат для поступления информации об абсолютном и избыточном давлении в герметической кабине соответственно, электронный коммутатор 3, первый и второй входы которого соединены с первым выходом блоком управления 1, третий и четвертый входы соединены с соответствующими выходами арбитра 6, а пятый вход соединен с третьим выходом блока управления 1 и является управляющим входом электронного коммутатора 3, первый и второй выходы электронного коммутатора 3 подключены соответственно к входам первого 4.1 и второго 4.2 электродвигателей, электронный ключ 2, первый и второй входы которого соединены со вторым выходом блока управления 1, третий вход соединен с четвертым выходом блока управления 1 и является управляющим входом электронного ключа 2, второй рабочий орган в виде заслонки 13, управляемый второй приводной системой 5 с двумя электродвигателями 5.1, 5.2, при этом первый и второй выходы электронного ключа 2 соединены соответственно с входами первого 5.1 и второго 5.2 электродвигателей.
Устройство, реализующее предложенный способ, работает следующим образом.
Принцип регулирования давления в ГК при ее разгерметизации основан на контроле атмосферного давления на текущей высоте полета и давления в ГК соответствующего текущей высоте полета, при отклонении давления в кабине от требуемого при неизменной высоте полета, вычислении скорости изменения давления в ГК, при ее отклонении от предельно допустимого значения - принудительное изменение давления в ГК за счет управляющего воздействия на заслонку регулятора подачи воздуха и на заслонку регулятора давления для выполнения требуемого закона изменения давления в ГК.
На первый вход блока управления 1 (который представляет собой бортовую цифровую вычислительную машину (БЦВМ), выполняющую вычислительные и управляющие функции) от системы воздушных сигналов (СВС) подается информация о параметрах полета: Рн (атмосферное давление на текущей высоте полета),  (избыточное давление в ГК),
(избыточное давление в ГК),  (абсолютное давление в ГК), информация о положении заслонок регулятора подачи (РП) и регулятора давления (РД). В блоке управления 1 через заданные интервалы времени производится сравнение изменения давления в ГК при неизменной текущей высоте полета. В случае отклонения значений давления в ГК от предыдущих производится принудительное регулирование давления в ГК. Это производится следующим образом.
(абсолютное давление в ГК), информация о положении заслонок регулятора подачи (РП) и регулятора давления (РД). В блоке управления 1 через заданные интервалы времени производится сравнение изменения давления в ГК при неизменной текущей высоте полета. В случае отклонения значений давления в ГК от предыдущих производится принудительное регулирование давления в ГК. Это производится следующим образом.
Информация о текущем значении Рн и Рк поступает в блок управления 1 с частотой опроса датчиков давления fопр=32 Гц. Значение частоты опроса датчиков давления выбирается из условия обеспечения необходимого резерва времени парирования изменения давления воздуха в ГК при ее разгерметизации.
В соответствии с алгоритмом функционирования блока управления 1, фиг. 2, с использованием данных о текущем Рн и Рк (блок 4 на фиг. 2), сравнивают текущее давление в ГК Рк(ti) с предыдущим Рк(ti-1), при неизменной высоте полета и Рн = const (блок 5 на фиг. 2), по результатам сравнения выбирается вариант регулирования давления.
Далее вычисляется скорость изменения давления воздуха в ГК (блок 6 на фиг. 2):
 ,
,
где ti=ti-1+τ,  - интервал вычисления [Быков Л.Т., Егоров М.С., Тарасов П.В. Высотное оборудование самолетов, Государственное издательство оборонной промышленности, Москва, 1958, стр. 42].
- интервал вычисления [Быков Л.Т., Егоров М.С., Тарасов П.В. Высотное оборудование самолетов, Государственное издательство оборонной промышленности, Москва, 1958, стр. 42].
Таким образом, в течение всего полета в блоке управления 1 осуществляется контроль текущих значений Рн и Рк с целью принятия решения по варианту регулирования (воздействию на те или иные исполнительные устройства) давления воздуха в ГК. Такое решение принимается следующим образом.
Сравнивается вычисленная скорость изменения давления в кабине и допустимая в зависимости от степени разгерметизации ГК (блок 7 на фиг. 2). При условии  регулирование подачи воздуха через впускной клапан не требуется, так как количество воздуха, подаваемое в ГК, полностью удовлетворяет условию создания требуемого давления. Регулирование давления согласно заданному закону полностью осуществляет регулятор давления. При этом электронный ключ 2 по сигналу с 4-го выхода блока управления 1 находится в закрытом состоянии, и управление заслонками регулятора подачи не производится. Подача воздуха в ГК осуществляется постоянно, в зависимости от режима полета. По сигналу с 3-го выхода блока управления 1 выходы арбитра подключены электронным коммутатором 3 к соответствующим входам управления электроприводами 4.1, 4.2 и регулирование давления в ГК производится посредством изменения положения заслонки выпускного клапана 11 и, следовательно, объема выпускаемого в атмосферу воздуха аналогично, как это осуществляется в прототипе следующим образом.
регулирование подачи воздуха через впускной клапан не требуется, так как количество воздуха, подаваемое в ГК, полностью удовлетворяет условию создания требуемого давления. Регулирование давления согласно заданному закону полностью осуществляет регулятор давления. При этом электронный ключ 2 по сигналу с 4-го выхода блока управления 1 находится в закрытом состоянии, и управление заслонками регулятора подачи не производится. Подача воздуха в ГК осуществляется постоянно, в зависимости от режима полета. По сигналу с 3-го выхода блока управления 1 выходы арбитра подключены электронным коммутатором 3 к соответствующим входам управления электроприводами 4.1, 4.2 и регулирование давления в ГК производится посредством изменения положения заслонки выпускного клапана 11 и, следовательно, объема выпускаемого в атмосферу воздуха аналогично, как это осуществляется в прототипе следующим образом.
Воздух со значением давления в отсеке сброса воздуха Рн и воздух со значением давления в ГК Рк поступают в чувствительный элемент 26 для измерения избыточного давления в кабине. Воздух со значением давления в ГК Рк также поступает в чувствительный элемент 24 для измерения абсолютного давления в ГК. Давление воздуха в сообщающемся с атмосферой отсеке сброса воздуха незначительно отличается от забортного атмосферного давления Рн. Блок датчиков давления 22 преобразует значения давления Рн и Рк в электрический информационный сигнал о значении давления в ГК и в электрический информационный сигнал о значении избыточного давления ГК  , соответственно, равного разности абсолютных давлений в ГК и в отсеке сброса. Сигналы о значениях
, соответственно, равного разности абсолютных давлений в ГК и в отсеке сброса. Сигналы о значениях  и Рк транслируются параллельно в резервный канал (РК) 27 и в два дублирующих интеллектуальных канала (ИК) 16, 23.
и Рк транслируются параллельно в резервный канал (РК) 27 и в два дублирующих интеллектуальных канала (ИК) 16, 23.
На основании информации о текущих значениях абсолютного давления  и избыточного давления
и избыточного давления  в ГК, получаемых от блока датчиков давления 22, информации о величине проходного сечения F проточной части 12, получаемой от соответствующего канала устройства обратной связи по положению рабочего органа 14 и информации о величине забортного атмосферного давления Рн, получаемой каждым из ИК 16, 23 из бортовых систем верхнего уровня 21 по мультиплексному каналу информационного обмена (МКИО) 18 с помощью соответствующего контроллера МКИО 17 или 25, каждый из ИК 16, 23 независимо друг от друга вычисляет текущий расход Gрас через проточную часть 12.
в ГК, получаемых от блока датчиков давления 22, информации о величине проходного сечения F проточной части 12, получаемой от соответствующего канала устройства обратной связи по положению рабочего органа 14 и информации о величине забортного атмосферного давления Рн, получаемой каждым из ИК 16, 23 из бортовых систем верхнего уровня 21 по мультиплексному каналу информационного обмена (МКИО) 18 с помощью соответствующего контроллера МКИО 17 или 25, каждый из ИК 16, 23 независимо друг от друга вычисляет текущий расход Gрас через проточную часть 12.
Оба ИК независимо друг от друга по двум последовательно измеренным за интервал времени Δt значениям абсолютного давления в ГК Рк(ti-1)и Рк(ti) и вычисленному значению расхода из ГК Gрас вычисляют текущий расход воздуха, подаваемого в ГК Gпод. По полученной от систем верхнего уровня 21 информации о величине забортного атмосферного давления Рн ИК 16, 23 вычисляют требуемое абсолютное давление в ГК 

При возникновении во время полета условия, когда вычисленная скорость изменения давления в кабине превышает допустимую  , например, при ее разгерметизации, блок управления 1 принимает решение на принудительное регулирование давления воздуха в ГК путем управления регулятором давления и регулятором подачи. При этом с 3-го и 4-го выходов блока управления 1 поступают управляющие сигналы, соответственно, на 5-й (управляющий) вход электронного коммутатора 3 (переключающий управление сбросом воздуха в атмосферу с арбитра на блок управления 1) и на 3-й (управляющий) вход электронного ключа 2 на подключение канала управления заслонками регулятора подачи и регулятора давления.
, например, при ее разгерметизации, блок управления 1 принимает решение на принудительное регулирование давления воздуха в ГК путем управления регулятором давления и регулятором подачи. При этом с 3-го и 4-го выходов блока управления 1 поступают управляющие сигналы, соответственно, на 5-й (управляющий) вход электронного коммутатора 3 (переключающий управление сбросом воздуха в атмосферу с арбитра на блок управления 1) и на 3-й (управляющий) вход электронного ключа 2 на подключение канала управления заслонками регулятора подачи и регулятора давления.
Для обеспечения процесса регулирования давления в блоке управления 1 в соответствии с реализуемым им алгоритмом (фиг. 2) вычисляется необходимое давление  в ГК, которое требуется создать для поддержания заданного давления на текущей высоте полета и парирования изменения давления воздуха в ГК при ее разгерметизации, как разность текущего давления в ГК Рк(ti) с предыдущим Рк(ti-1) за время вычисления τ при Рн=const (блок 8 на фиг. 2).
в ГК, которое требуется создать для поддержания заданного давления на текущей высоте полета и парирования изменения давления воздуха в ГК при ее разгерметизации, как разность текущего давления в ГК Рк(ti) с предыдущим Рк(ti-1) за время вычисления τ при Рн=const (блок 8 на фиг. 2).
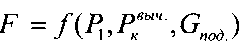
Далее блоком управления 1 вычисляется необходимое количество воздуха  для поддержания Рк на Рн. Количество требуемого воздуха подачи определяется как функция:
для поддержания Рк на Рн. Количество требуемого воздуха подачи определяется как функция:

[Быков Л.Т., Егоров М.С., Тарасов П.В. Высотное оборудование самолетов, Государственное издательство оборонной промышленности, Москва, 1958, стр. 203],
где Р1 - давление воздуха перед регулятором подачи, Т1 - температура воздуха перед регулятором подачи, Тк - температура воздуха в ГК (блок 9 на фиг. 2).
Температура Тк для ГК является параметром, относительное изменение величины которого для данного устройства является незначительным, поэтому ее можно считать усредненной константой. Исходя из этого

По вычисленному значению Gпод блоком управления 1 определяется необходимое количество воздуха (и, соответственно, сечение клапанов) для создания требуемого давления со скоростью его изменения, не превышающей предельно допустимую (блок 11 на фиг. 2). Площадь проходных сечений регулирующих органов F вычисляется как функция
[Илюшин Ю.С., Олизаров В.В. Системы обеспечения жизнедеятельности и спасения экипажей летательных аппаратов. Издание ВВИА им. проф. Н.Е. Жуковского, 1972, стр. 152-154].
В соответствии с полученным результатом блок управления 1 подает команду на электроприводы 4 и 5, на установку требуемых положений рабочих органов впускного и выпускного клапанов (блок 10 на фиг. 2).
Таким образом, заявляемые способ и устройство за счет сравнения вычисленной скорости изменения давления воздуха в ГК с предельно допустимой и принудительного регулирования давления воздуха в ГК путем дополнительного воздействия на регулятор подачи воздуха позволяет повысить точность регулирования давления воздуха в ГК при ее разгерметизации.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ ВОЗДУХА В ГЕРМЕТИЧЕСКОЙ КАБИНЕ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2581893C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ ВОЗДУХА В ГЕРМЕТИЧЕСКОЙ КАБИНЕ ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ОСОБЫХ УСЛОВИЯХ ПОЛЕТА | 2020 |
|
RU2755950C1 |
| УСТРОЙСТВО РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ В ГЕРМОКАБИНЕ ЛЕТАТЕЛЬНОГО АППАРАТА | 2001 |
|
RU2216485C2 |
| КОМПЛЕКСНАЯ СИСТЕМА КОНДИЦИОНИРОВАНИЯ ВОЗДУХА ЛЕТАТЕЛЬНОГО АППАРАТА | 2017 |
|
RU2682758C1 |
| СПОСОБ КОМПЕНСАЦИИ ИНСТРУМЕНТАЛЬНЫХ ПОГРЕШНОСТЕЙ БЕСПЛАТФОРМЕННЫХ ИНЕРЦИАЛЬНЫХ НАВИГАЦИОННЫХ СИСТЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2362977C1 |
| ЛЕГКИЙ СВЕРХЗВУКОВОЙ МНОГОЦЕЛЕВОЙ САМОЛЕТ | 2004 |
|
RU2271305C1 |
| ПАССАЖИРСКИЙ САМОЛЕТ С СИСТЕМОЙ УПРАВЛЕНИЯ ОБЩЕСАМОЛЕТНЫМ ОБОРУДОВАНИЕМ И САМОЛЕТНЫМИ СИСТЕМАМИ | 2013 |
|
RU2529248C1 |
| Устройство управления системой кондиционирования воздуха летательного аппарата | 2015 |
|
RU2617160C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ ЛЕГКОГО УЧЕБНО-БОЕВОГО САМОЛЕТА | 2002 |
|
RU2203200C1 |
| ТВЕРДОТЕЛЬНЫЙ ВОЛНОВОЙ ГИРОСКОП | 2008 |
|
RU2362975C1 |
Группа изобретений относится к способу регулирования давления воздуха в герметической кабине летательного аппарата (ЛА) при ее разгерметизации и системе, осуществляющей этот способ. Для регулирования давления воздуха в герметической кабине ЛА измеряют абсолютное и избыточное давление воздуха в кабине ЛА и определяют значение величин рассогласования заданных и измеренных значений относительно атмосферного давления и скорости изменения абсолютного давления воздуха в этой кабине, формируют управляющее воздействие при рассогласовании, сравнивают текущую скорость изменения давления с предельно допустимой, осуществляют принудительное регулирование давления воздуха при превышении предельно допустимого значения. Устройство регулирования давления содержит проточную часть, два рабочих органа в виде заслонки, две приводные системы с двумя электродвигателями каждая, устройство обратной связи по положению рабочего органа с двумя каналами, блок датчиков давления с двумя чувствительными элементами, арбитр, узлы контроля исправности, резервный канал, два контроллера мультиплексного канала, два интеллектуальных канала, служебный канал, бортовые системы верхнего уровня, блок управления, электронный ключ, соединенные определенным образом. Обеспечивается поддержание давления в герметической кабине в допустимых пределах. 2 н.п. ф-лы, 2 ил.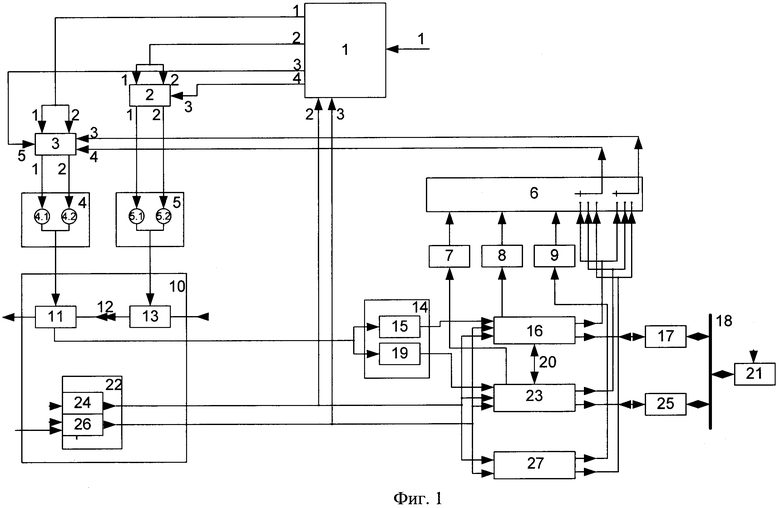
1. Способ регулирования давления воздуха в герметической кабине при ее разгерметизации, основанный на измерении абсолютного и избыточного давлений воздуха в герметической кабине, определении величин рассогласования заданного и измеренного значений абсолютного давления и избыточного давления воздуха в герметической кабине относительно атмосферного давления и скорости изменения абсолютного давления воздуха в этой кабине и при наличии рассогласования - формировании управляющего воздействия и регулировании давления воздуха в упомянутой кабине, отличающийся тем, что дополнительно сравнивают текущую скорость изменения давления в кабине с предельно допустимой, и если текущая скорость изменения давления будет больше предельно допустимого значения, то осуществляют принудительное регулирование давление воздуха в герметической кабине.
2. Устройство регулирования давления воздуха в герметической кабине при ее разгерметизации, содержащее проточную часть, первый рабочий орган в виде заслонки, управляемый первой приводной системой с двумя электродвигателями, устройство обратной связи по положению рабочего органа, блок датчиков давления с чувствительными элементами с соответствующими входами подачи воздуха, арбитр, связанный с узлами контроля исправности, резервный канал, соединенный с обоими чувствительными элементами блока датчиков давления, с узлом контроля исправности и с арбитром, два контроллера мультиплексного канала информационного обмена, два интеллектуальных канала, связанных друг с другом через служебный канал информационного обмена, причем каждый интеллектуальный канал связан с рабочим органом через устройство обратной связи по положению рабочего органа, с обоими чувствительными элементами блока датчиков давления, с узлом контроля исправности, с арбитром и при помощи контроллера мультиплексного канала информационного обмена через мультиплексный канал информационного обмена - с бортовыми системами верхнего уровня с соответствующими входами для поступления информации о забортном атмосферном давлении, устройство обратной связи по положению рабочего органа, состоящее из двух каналов обратной связи, соединенных по входу с рабочим органом, а по выходу подключенных к интеллектуальному каналу, отличающееся тем, что дополнительно введены блок управления, первый вход которого служит для поступления информации об атмосферном давлении полета, второй и третий входы которого соединены с выходами соответствующих чувствительных элементов блока датчиков давления и служат для поступления информации об абсолютном и избыточном давлении в герметической кабине соответственно, электронный коммутатор, первый и второй входы которого соединены с первым выходом блока управления, третий и четвертый входы соединены с соответствующими выходами арбитра, а пятый вход соединен с третьим выходом блока управления и является управляющим входом электронного коммутатора, первый и второй выходы электронного коммутатора подключены соответственно к входам первого и второго электродвигателей, электронный ключ, первый и второй входы которого соединены со вторым выходом блока управления, третий вход соединен с четвертым выходом блока управления и является управляющим входом электронного ключа, второй рабочий орган в виде заслонки, управляемый второй приводной системой с двумя электродвигателями, при этом первый и второй выходы электронного ключа соединены соответственно с входами первого и второго электродвигателей.
| УСТРОЙСТВО РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ В ГЕРМОКАБИНЕ ЛЕТАТЕЛЬНОГО АППАРАТА | 2001 |
|
RU2216485C2 |
| СПОСОБ И СИСТЕМА РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ ВОЗДУХА НА ЛЕТАТЕЛЬНОМ АППАРАТЕ | 2003 |
|
RU2231483C1 |
| US 4164896 A1, 21.08.1979 | |||
| WO 2005070764 A1, 04.08.2005. | |||

