Изобретение относится к области навигационных измерений и может быть использовано для определения координат местоположения подвижного объекта, например летательного аппарата (ЛА).
Известен способ компенсации инструментальных погрешностей лазерных гироскопов, заключающийся в реверсивном развороте вокруг одной или нескольких осей чувствительности инерциального измерительного блока.
Известно устройство, состоящее из инерциального измерительного блока с механизмом вращения, блока электроники и интерфейсов, цифрового микропроцессора и устройств сопряжения и отображения навигационных параметров.
Недостатком известных способа и устройства является отсутствие возможности корректировать параметры закона управления инерциального измерительного блока (ИИБ), необходимость которой вызывают изменяющиеся с течением времени эксплуатации инструментальные погрешности лазерных гироскопов, что приводит к снижению точности бесплатформенной инерциальной навигационной системы (БИНС).
Наиболее близкими к изобретению являются способ компенсации навигационных параметров в автономном режиме функционирования, заключающийся в периодическом вращении инерциального измерительного блока с целью уменьшения влияния инструментальных погрешностей лазерных гироскопов. А также устройство, реализующее данный способ, включающее блок лазерных гироскопов, блок акселерометров, механизм вращения, блок электроники инерциального измерительного блока и интерфейсов, цифровой микропроцессор, блок сопряжения с навигационной информацией, блок вычисления скоростей, блок управления и отображения информации, аналого-цифровой и цифроаналоговый преобразователи [1].
Технической задачей изобретения является повышение точности определения пилотажных и навигационных параметров полета летательного аппарата за счет изменения параметров закона управления ИИБ в процессе эксплуатации БИНС.
Технический результат изобретения достигается тем, что в способе компенсации инструментальных погрешностей бесплатформенных инерциальных навигационных систем, заключающемся в периодическом вращении ИИБ, состоящего из блока акселерометров и блока гироскопов и закрепленного на механизме вращения, применяя коррекцию закона управления ИИБ путем изменения его параметров в зависимости от изменения инструментальных погрешностей лазерных гироскопов, используя при этом функциональную зависимость между оптимальными параметрами закона управления ИИБ и данными об изменении инструментальных погрешностей лазерных гироскопов.
В устройство для осуществления способа компенсации инструментальных погрешностей лазерных гироскопов, содержащее блок лазерных гироскопов, блок акселерометров, механизм вращения, блок электроники ИИБ и интерфейсы, цифровой микропроцессор, блок сопряжения с навигационной информацией, блок вычисления скоростей, блок управления и отображения информации, аналого-цифровой преобразователь и цифроаналоговый преобразователь, дополнительно введен блок коррекции, который определяет оптимальные параметры закона управления ИИБ в зависимости от временных изменений статистических характеристик лазерных гироскопов и содержит счетчик времени, блок определения погрешностей лазерных гироскопов, блок выдачи сигнала коррекции, блок выдачи параметров закона управления, при этом входы блока определения погрешностей лазерных гироскопов соединены с выходами блока управления и отображения информации и счетчика времени, выход которого соединен с блоком выдачи сигнала коррекции; выход блока выдачи параметров закона управления соединен с входом блока электроники инерциального измерительного блока и интерфейсов, а входы - с выходами блока определения погрешностей лазерных гироскопов и блока выдачи сигнала коррекции.
Существенными отличительными признаками от прототипа по способу является следующая совокупность действий:
используют функциональную зависимость между оптимальными параметрами закона управления ИИБ и данными об изменении инструментальных погрешностей лазерных гироскопов;
применяют коррекцию закона управления ИИБ в течении всего срока эксплуатации системы,
по устройству - блок коррекции оптимальной угловой скорости ИИБ.
Применение всех новых признаков позволяет повысить точность определения пилотажно-навигационных параметров БИНС за счет учета дополнительных возмущающих воздействий, под которыми подразумевается увеличение инструментальных ошибок лазерных гироскопов с течением срока эксплуатации.
Известно, что для серийно выпускаемых лазерных гироскопов ошибка смещения нуля изменяется по линейному закону и составляет 0.004 °/ч за год эксплуатации. Стабильность ошибки масштабного коэффициента составляет 5×10-6 в течение года после калибровки и 15×10-6 за 5 лет эксплуатации [2].
Изменение характеристик лазерных гироскопов приводит к тому, что по истечении некоторого промежутка времени заданные параметры закона управления перестают быть оптимальными для эффективного устранения ошибок автономной БИНС и появляется необходимость корректировать параметры закона управления ИИБ.
На чертеже изображена блок-схема для реализации способа повышения точности определения навигационных параметров, который осуществляется следующим образом.
Закон управления ИИБ представлен в виде

где ω - угловая частота реверсивного вращения ИИБ;
с1, с3, с5 - коэффициенты закона управления.
Уравнение, характеризующее динамику нарастания ошибок БИНС с течением времени автономной работы, представим в следующем виде:

где Р - ковариационная матрица ошибок БИНС с автокомпенсацией погрешностей;
F - матрица состояния ошибок БИНС с автокомпенсацией;
G - матрица возмущений;
Q - матрица интенсивности белого шума.
Определение оптимальных параметров закона управления ИИБ производится на основании минимума показателя точности
где Рii - диагональные элементы ковариационной матрицы ошибок БИНС с вращением ИИБ;
 - диагональные элементы ковариационной матрицы ошибок БИНС без вращения ИИБ.
- диагональные элементы ковариационной матрицы ошибок БИНС без вращения ИИБ.
Решая уравнения (1), (2), с учетом варьирования погрешностей лазерных гироскопов, получаем экспериментальные значения оптимальных параметров закона управления ИИБ.
Определение функциональных зависимостей оптимальных параметров закона управления ИИБ по полученным экспериментальным данным осуществляется при помощи метода наименьших квадратов и имеют вид:




где a, b, d, f - коэффициенты аппроксимирующих полиномов;
X, Y - статистические характеристики лазерных гироскопов.
Соотношения (4), (5), (6), (7) определяют функциональную зависимость между оптимальными параметрами закона управления ИИБ и увеличивающимися с течением срока эксплуатации БИНС инструментальными погрешностями лазерных гироскопов.

На чертеже изображена блок-схема устройства для компенсации инструментальных погрешностей бесплатформенной инерциальной навигационной системы.
В состав устройства входят инерциальный измерительный блок 1, включающий блок лазерных гироскопов 2, блок акселерометров 3, выходы которых соединены с входом блока электроники ИИБ и интерфейсов 5, выходы которого соединены с цифровым микропроцессором 6 и механизмом вращения 4; выход вычислителя скоростей 11 через аналого-цифровой преобразователь 9 соединен с входом цифрового микропроцессора 6, выходами которого являются шина навигационной информации 13, через блок сопряжения 7 и пилотажная информация 12 через цифроаналоговый преобразователь 10. Выход блока управления и отображения информации 8 соединен с входом цифрового микропроцессора 6, а вход - с выходом блока коррекции 14, а именно с входом блока определения погрешностей лазерных гироскопов 16, выход которого соединен с входом блока выдачи параметров закона управления 18, выход которого соединен с входом блока электроники ИИБ и интерфейсов 5. Выходной сигнал со счетчика времени 15 поступает на блок определения погрешностей лазерных гироскопов 16 и блок выдачи сигнала коррекции 17, выход которого соединен с входом блока выдачи параметров закона управления 18.
Инерциальный измерительный блок 1 состоит из блока лазерных гироскопов 2, блока акселерометров 3 и закреплен на механизме вращения 4.
Блок электроники ИИБ и интерфейсов 5 представляет собой устройство, которое выдает электрический сигнал на двигатель механизма вращения ИИБ 4, а также выполняет роль связующего устройства между блоком лазерных гироскопов, блоком акселерометров и цифровым микропроцессором 5.
Аналого-цифровой преобразователь 9 предназначен для преобразования и передачи аналоговой информации вычислителя скоростей 11 к цифровому микропроцессору 5.
Цифроаналоговый преобразователь 10 предназначен для преобразования в аналоговый вид и передачи потребителям аналоговой информации об углах курса, крена и тангажа 12.
Блок сопряжения с навигационной информацией 7 предназначен для преобразования сигналов с выхода цифрового микропроцессора 6 в цифровой код шины навигационной информации 13.
Блок управления и отображения информации 8 предназначен для отображения навигационной информации и параметров ориентации, а также для выдачи в блок определения погрешностей лазерных гироскопов 16 начальных значений ошибок лазерных гироскопов, входящих в состав ИИБ.
Блок коррекции 14, состоящий из счетчика времени 15, блока определения погрешностей лазерных гироскопов 16, блока выдачи сигнала коррекции 17, блока выдачи параметров закона управления 18, предназначен для выдачи в блок электроники и интерфейсов 5 оптимальных параметров закона управления инерциальным измерительным блоком в зависимости от изменения, с течением времени, статистических характеристик блока лазерных гироскопов 2. В блок коррекции 14 данные о начальных значениях инструментальных погрешностей лазерных гироскопов поступают от блока управления и отображения информации 8.
Счетчик времени 15 предназначен для выдачи в блок определения погрешностей лазерных гироскопов 16 и блок выдачи сигнала коррекции данных о времени эксплуатации БИНС.
Блок определения погрешностей лазерных гироскопов 16 предназначен для нахождения инструментальных погрешностей лазерных гироскопов в зависимости от времени эксплуатации БИНС.
Блок выдачи сигнала коррекции 17 выдает команду в блок выдачи параметров закона управления 18 о начале коррекции через определенные промежутки времени эксплуатации БИНС.
Блок выдачи параметров закона управления 18 вычисляет и выдает в блок электроники и интерфейсов 5 оптимальные параметры закона управления ИИБ.
Определение инструментальных погрешностей лазерных гироскопов в зависимости от времени эксплуатации БИНС производится в блоке определения погрешностей лазерных гироскопов 16 на основании сигнала о начальных значениях погрешностей лазерных гироскопов из блока управления и отображения информации 8 и сигнала о времени эксплуатации системы из счетчика времени 15.
На основании данных о текущих значениях инструментальных погрешностей лазерных гироскопов, поступающих из блока определения погрешностей лазерных гироскопов 16, сигнала с блока выдачи сигнала коррекции 17 и выражений (1), (4), (5), (6), (7), в блоке выдачи параметров закона управления 18 определяются оптимальные параметры закона управления инерциальным измерительным блоком 1, а затем поступают в блок электроники и интерфейсов 5. Сигнал о начале коррекции формируется в алгоритме функционирования блока выдачи сигнала коррекции 17 с учетом сигнала, поступающего от счетчика времени 15.
Сигнал (1) с оптимальными параметрами закона управления с блока электроники ИИБ и интерфейсов 5 поступает на двигатель механизма вращения 4.
Сигналы, пропорциональные угловой скорости и ускорению с инерциального измерительного блока 1, через блок электроники инерциального измерительного блока и интерфейсов 5 поступает в цифровой микропроцессор 6.
В цифровом микропроцессоре 6 происходит вычисление углов ориентации 12, которые при помощи цифроаналогового преобразователя 10 выдаются потребителям. Навигационные параметры вычисляются в цифровом микропроцессоре 6 и через блок сопряжения с навигационной информацией 7 и поступают в шину навигационной информации 13. Данные вычисления происходят с учетом информации от вычислителя скорости 11, которая поступает в цифровой микропроцессор 6, через аналогово-цифровой преобразователь 9. Визуализация навигационной информации и углов ориентации осуществляется через блок управления и отображения информации 8.
Источники информации
1. Анучин О.Н. и др. Интегрированные системы ориентации и навигации для морских подвижных объектов. - СПб.: 1999. с.331-338 (прототип).
2. Лукъянов Д.П. и др. Лазерные инерциальные системы. - СПб.: 1995.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОМПЕНСАЦИИ ПОГРЕШНОСТЕЙ ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЬНЫХ ЭЛЕМЕНТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2550298C1 |
| СПОСОБ АВТОНОМНОЙ КОМПЕНСАЦИИ ИНСТРУМЕНТАЛЬНЫХ ПОГРЕШНОСТЕЙ БЕСПЛАТФОРМЕННЫХ ИНЕРЦИАЛЬНЫХ НАВИГАЦИОННЫХ СИСТЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2585792C1 |
| СПОСОБ КОМПЕНСАЦИИ ПОГРЕШНОСТЕЙ ИНФОРМАЦИОННОГО КОМПЛЕКСА НАВИГАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2022 |
|
RU2792402C1 |
| Способ компенсации инструментальных погрешностей бесплатформенных инерциальных навигационных систем и устройство для его осуществления | 2020 |
|
RU2737886C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИНСТРУМЕНТАЛЬНЫХ ПОГРЕШНОСТЕЙ ИЗМЕРИТЕЛЕЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ НА ЭТАПЕ НАЧАЛЬНОЙ ВЫСТАВКИ | 2005 |
|
RU2300081C1 |
| СПОСОБ ИНЕРЦИАЛЬНОЙ НАВИГАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2572403C1 |
| ТВЕРДОТЕЛЬНЫЙ ВОЛНОВОЙ ГИРОСКОП | 2008 |
|
RU2362975C1 |
| СПОСОБ КОСМИЧЕСКОЙ НАВИГАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2378617C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2313067C2 |
| Способ инерциальной навигации беспилотного летательного аппарата и устройство для его осуществления | 2020 |
|
RU2744700C1 |
Изобретение относится к области навигационных измерений и может быть использовано для определения координат местоположения подвижного объекта, например летательного аппарата (ЛА). Технический результат - повышение точности определения пилотажных и навигационных параметров полета летательного аппарата. Сущность изобретения заключается в коррекции параметров закона управления инерциального измерительного блока в течение всего срока эксплуатации бесплатформенной инерциальной навигационной системы. Коррекция осуществляется на основании выявленной функциональной зависимости между оптимальными параметрами закона управления инерциального измерительного блока и изменяющимися с течением времени инструментальными погрешностями лазерных гироскопов. Устройство содержит инерциальный измерительный блок, в состав которого входят блок лазерных гироскопов и блок акселерометров, механизм вращения, блок электроники инерциального измерительного блока и интерфейсы, цифровой микропроцессор, блок сопряжения с навигационной информацией, блок вычисления скоростей, блок управления и отображения информации, аналого-цифровой преобразователь и цифроаналоговый преобразователь, блок коррекции, включающий счетчик времени, блок определения погрешностей лазерных гироскопов, блок выдачи сигнала коррекции, блок выдачи параметров закона управления, шину навигационной информации. 2 н.п. ф-лы, 1 ил.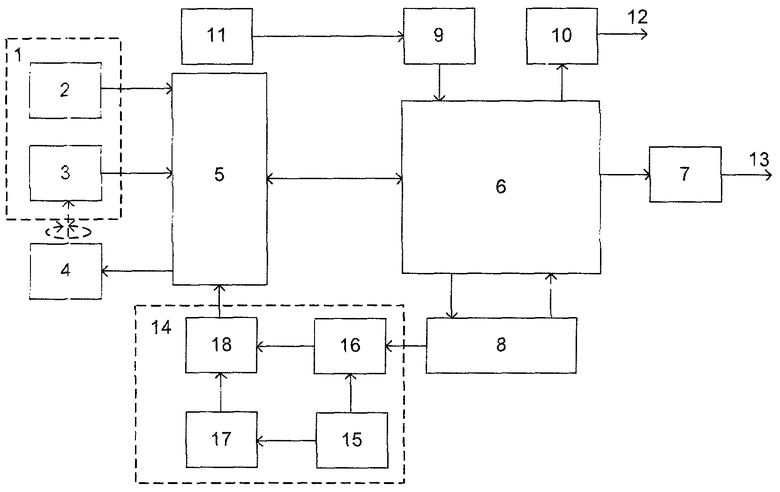
1. Способ компенсации инструментальных погрешностей бесплатформенных инерциальных навигационных систем, заключающийся во вращении по периодическому закону управления инерциального измерительного блока, состоящего из блока акселерометров и блока гироскопов и закрепленного на механизме вращения, отличающийся тем, что применяют коррекцию параметров закона управления инерциальным измерительным блоком на основании функциональной зависимости между оптимальными параметрами закона управления и данными об изменении в процессе эксплуатации инструментальных погрешностей лазерных гироскопов.
2. Устройство для компенсации инструментальных погрешностей бесплатформенных инерциальных навигационных систем, включающее инерциальный измерительный блок, в состав которого входят блок лазерных гироскопов и блок акселерометров, механизм вращения, блок электроники инерциального измерительного блока и интерфейсы, цифровой микропроцессор, блок сопряжения с навигационной информацией, блок вычисления скоростей, блок управления и отображения информации, аналого-цифровой преобразователь и цифроаналоговый преобразователь, шину навигационной информации, отличающееся тем, что для определения и коррекции оптимальных параметров закона управления инерциальным измерительным блоком дополнительно используется блок коррекции, в состав которого входят счетчик времени, блок определения погрешностей лазерных гироскопов, блок выдачи сигнала коррекции, блок выдачи параметров закона управления, при этом входы блока определения погрешностей лазерных гироскопов соединены с выходами блока управления и отображения информации и счетчика времени, выход которого соединен с блоком выдачи сигнала коррекции; выход блока выдачи параметров закона управления соединен с входом блока электроники инерциального измерительного блока и интерфейсов, а входы - с выходами блока определения погрешностей лазерных гироскопов и блока выдачи сигнала коррекции.
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОСАДКОЙ САМОЛЕТА | 1993 |
|
RU2040434C1 |
| НЕОРТОГОНАЛЬНЫЙ ГРАВИИЗМЕРИТЕЛЬНЫЙ КОМПЛЕКС | 2001 |
|
RU2189617C1 |
| КУРСОВАЯ СИСТЕМА | 2004 |
|
RU2279636C1 |
| US 3031662 A, 24.04.1962. | |||

