Группа изобретений относится к области артиллерии, а более конкретно - к средствам обеспечения точности стрельбы комплексов артвооружения.
Известны различные способы повышения точности стрельбы из разных видов оружия. См., например, патенты РФ на изобретения: №№ 2162587, 1999 г., 2213928, 2001 г., 2230280, 2003 г., 2234654, 2000 г., 2267076, 2004 г., патент США № 5205168, 1993 г., патент ЕПВ № 1291599, 2003 г., патент ФРГ № 60017377, 2006 г., патент Бельгии № 809102, 1974 г., патент США № 2001039874, 2001 г., и др.
Все указанные выше известные способы не обеспечивают определение ошибки бокового увода направления стрельбы из артиллерийской установки (далее АУ) при изменении угла возвышения ствола, вызванной погрешностями изготовления, связанными с непараллельностью оси цапф орудия контрольной площадке ствола и с ее неперпендикулярностью оси канала ствола.
Для исключения ошибки стрельбы, связанной с указанным боковым уводом направления стрельбы, используется операция по измерению величины увода по мере изменения угла возвышения ствола. Во время стрельбы учет величины увода производится введением в систему управления наведением АУ на цель поправки, обеспечивающей повышение точности стрельбы из АУ.
Наиболее близким техническим решением по технической сущности и достигаемому эффекту от его использования к заявляемому решению является известный способ определения бокового увода направления стрельбы из артиллерийской установки 2С5 (см. «ИЗДЕЛИЕ 2С5. Техническое описание и инструкция по эксплуатации 2С5.ТO2. Книга 3. Части 1 и 2.» (Москва, 1986 г., с. 876, п. 11.7.9.)), в котором сначала расстопаривают ствол АУ из положения «по-походному» и укладывают стопор на корпус АУ, затем горизонтируют ствол пушки в продольном и поперечном направлении.
После этого устанавливают на направлении оси канала ствола на расстоянии 25…40 м от дульного тормоза треногу с буссолью ПАБ или теодолитом, который также горизонтируют, на дульном срезе ствола наклеивают по рискам вертикальную нить и извлекают ударный механизм из гнезда затвора. Затем производят подготовку к измерениям элементов и блоков системы (теодолита, панорамы или прицела прямой наводки, поворотного и подъемного механизмов), согласуя при этом оптическую ось теодолита с осью канала ствола.
Панораму наводят на точку наводки (например, на коллиматор, установленный перед прицелом на расстоянии 6…10 м), после чего отмечаются панорамой по коллиматору и полученный угломер записывают как основной.
Для того чтобы измерить величину увода линии стрельбы при изменении угла возвышения ствола, в прицел вводят последовательно шесть заданных углов прицеливания и на каждом угле возвышения, визируясь на буссоль или теодолит, механизмом поворота орудия совмещают вертикальную нить на дульном срезе с прибором, после чего выводят панораму в ту же точку наводки и записывают полученный угломер.
По разности между основным угломером и угломером при угле возвышения определяют поправку на увод линии прицеливания.
Вышеуказанный способ хотя и позволяет определять поправку на увод линии направления стрельбы, однако в силу того что для определения указанной поправки измерения необходимо осуществлять измерения с помощью теодолита, который устанавливают перед АУ и визируют на вертикальную линию перекрестия на дульном срезе ствола, а при изменении угла возвышения нужно совмещать линию на стволе с визирной осью теодолита, затем эти значения приходится пересчитывать в угловые поправки на боковой увод, соответствующие углу возвышения ствола, то указанные измерения очень трудоемки и имеют низкую точность, особенно для АУ, стреляющих на больших углах возвышения.
Задачей, на решение которой направлено заявляемое изобретение, является расширение арсенала имеющихся технических средств, связанных с дальнейшим повышением эффективности использования систем обеспечения точности стрельбы комплексов артвооружения путем повышения степени их автоматизации за счет использования современных технологий измерений с применением ЭВМ, а также расширения области их использования за счет обеспечения возможности непосредственного измерения бокового увода направления стрельбы при наведении АУ по углу возвышения.
Указанная задача решается в первую очередь за счет технического результата от использования предлагаемого изобретения, заключающегося,
во-первых, в существенном повышении точности измерения ухода оси канала ствола от вертикальной плоскости при изменении угла возвышения ствола;
во-вторых, в упрощении проведения операции определения бокового увода направления стрельбы;
в-третьих, в уменьшении трудоемкости операции определения бокового увода направления стрельбы.
Указанный технический результат достигается тем, что в известном способе определения бокового увода направления стрельбы, в котором
- сначала расстопаривают ствол АУ из положения «по-походному»,
- после этого устанавливают ствол в горизонтальное положение и горизонтируют орудие с использованием уровня на контрольной площадке, а затем производят подготовку элементов и блоков системы к измерениям, после чего измеряют величину увода направления стрельбы при изменении угла возвышения ствола и по величине рассогласования судят о величине бокового увода направления стрельбы, а при ведении стрельбы поправку на боковой увод направления стрельбы вводят в систему управления наведением АУ на цель,
во-первых, величину бокового ухода оси ствола от вертикальной плоскости определяют непосредственным измерением при изменении углов вертикального наведения орудия с помощью нижеописанного специального устройства - измерителя угловых перемещений ствола (ИУПС);
во-вторых, по результатам измерений углового положения ствола с помощью этого устройства вычисляют величины непараллельности оси цапф АУ (орудия) контрольной площадке на казеннике АУ Δцкп и неперпендикулярности оси цапф базовой оси канала ствола Δцос по формуле:

где Δцкп - величина непараллельности оси цапф АУ контрольной площадке на казеннике,
Δцос - величина неперпендикулярности оси цапф базовой оси канала ствола,
Сх, Сy - направляющие косинусы оси цапф;
в-третьих, по вычисленным параметрам непараллельности оси цапф АУ (орудия) контрольной площадке Δцкп и неперпендикулярности оси цапф базовой оси Δцос вычисляют поправку на боковой увод направления стрельбы из АУ по формуле

где δψ(φ) - поправка на боковой увод;
φ - угол возвышения ствола,
после чего указанную определенную поправку вводят в автоматизированную систему управления наведением АУ на цель.
Заявляемый способ определения бокового увода направления стрельбы реализуется с помощью предложенного авторами специального устройства - измерителя угловых перемещений ствола (ИУПС).
Известны различные устройства для повышения точности стрельбы из разных видов оружия. См., например, патенты РФ на изобретения: №№ 2162587, 1999 г., 2213928, 2001 г., 2230280, 2003 г., 2234654, 2000 г., 2267076, 2004 г., 2367880, 2008 г., 2300072, 2005 г., 2418258, 2010 г., 2420703, 2010 г., патент РФ на полезную модель № 81306 и др., патент США № 5205168, 1993 г., патент ЕПВ № 1291599, 2003 г., патент ФРГ № 60017377, 2006 г., патент Бельгии № 809102, 1974 г., патент США № 2001039874, 2001 г., и др.
Указанные устройства хотя и позволяют повысить точность стрельбы из огнестрельного оружия, однако они не обеспечивают возможности определения бокового увода ствола при наведении АУ при изменении угла возвышения ствола, приводящего к значительной ошибке наведения и снижению точности стрельбы, особенно при больших углах возвышения.
Наиболее близким техническим решением по технической сущности и достигаемому эффекту от его использования к заявляемому решению является известное устройство для определения бокового увода направления стрельбы из артиллерийской установки 2С5 (см. «ИЗДЕЛИЕ 2С5. Техническое описание и инструкция по эксплуатации 2С5.ТO2. Книга 3. Части 1 и 2.» (Москва, 1986 г., с. 876, п. 11.7.9.)), содержащее:
- контрольный уровень, устанавливаемый на контрольную площадку казенника АУ;
- измеритель увода оси канала ствола от вертикальной плоскости при изменении угла возвышения ствола, включающий теодолит, панораму или прицел прямой наводки;
- коллиматор, устанавливаемый перед панорамой или прицелом.
Вышеуказанное устройство хотя и позволяет определять поправку на увод линии прицеливания, однако для определения указанной поправки необходимо осуществлять измерения с помощью теодолита, который устанавливают перед орудием и визируют на перекрестие из ниток на дульном срезе ствола. Эти измерения очень трудоемки и имеют низкую точность, особенно для артустановок, стреляющих на больших углах возвышения.
Задачей, на решение которой направлено заявляемое изобретение, является расширение арсенала имеющихся технических средств, связанных с дальнейшим повышением эффективности использования систем обеспечения точности стрельбы комплексов артвооружения путем повышения степени их автоматизации за счет использования современных технологий измерений с применением ЭВМ, а также расширения области их использования за счет обеспечения возможности непосредственного измерения бокового увода направления стрельбы при наведении АУ по углу возвышения.
Указанная задача решается в первую очередь за счет технического результата от использования предлагаемого изобретения, заключающегося,
во-первых, в существенном повышении точности измерения увода оси канала ствола от вертикальной плоскости при изменении угла возвышения ствола;
во-вторых, в упрощении проведения операции определения бокового увода направления стрельбы;
в-третьих, в уменьшении трудоемкости операции определения бокового увода направления стрельбы.
Указанный технический результат достигается тем, что в заявленном устройстве для определения бокового увода направления стрельбы, содержащем
- измеритель увода оси канала ствола от вертикальной плоскости при изменении угла возвышения ствола,
во-первых, измеритель увода канала ствола от вертикальной плоскости выполнен в виде измерителя угловых перемещений ствола (далее ИУПС), имеющего центрирующий хвостовик, вставляемый в дульную часть ствола, и измерительный (базирующий) блок, вставляемый в хвостовик с помощью конуса Морзе и состоящий из опорной плиты с установленным на ней малогабаритным измерительным модулем, включающим трехосный гироскопический датчик угла и трехосный датчик ускорений, изготовленные, например, по технологии MEMS /в переводе: Микро-Электро-Механические Системы/ (далее технология МЭМС),
во-вторых, опорная плита измерительного блока соединена с конусом Морзе через регулируемую шаровую опору.
Предлагаемые способ и устройство для определения бокового увода направления стрельбы в зависимости от изменения углов возвышения ствола позволяют существенно повысить точность измерения увода оси канала ствола от вертикальной плоскости при изменении угла возвышения ствола, упростить проведение операции и уменьшить ее трудоемкость.
Предлагаемые способ и устройство пояснены чертежами, на которых:
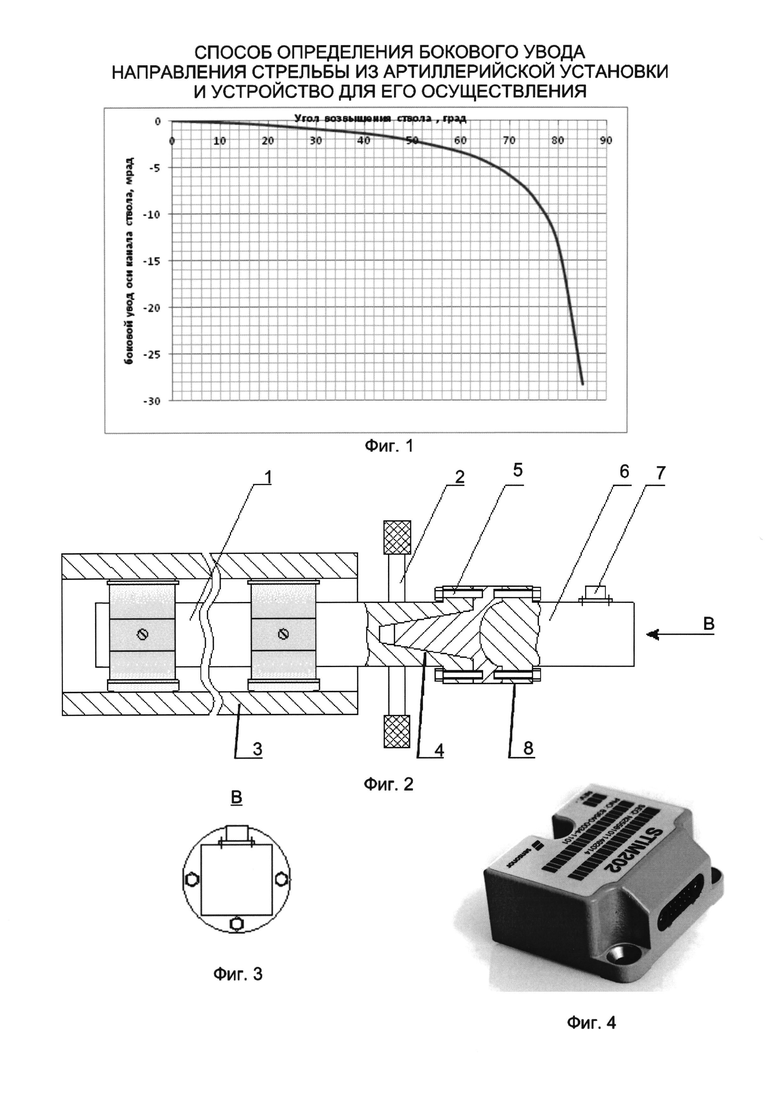
- на Фиг. 1 представлен график изменения бокового увода оси ствола при изменении угла возвышения для одного из образцов АУ и соответствующие ему параметры бокового увода направления стрельбы.
- на Фиг. 2 показана схема измерителя угловых перемещений ствола (ИУПС);
- на Фиг. 3 показан вид на ИУПС по стрелке B (см. Фиг. 2);
- на Фиг. 4 показана фотография одного из измерительных модулей норвежской компании Sensonor;
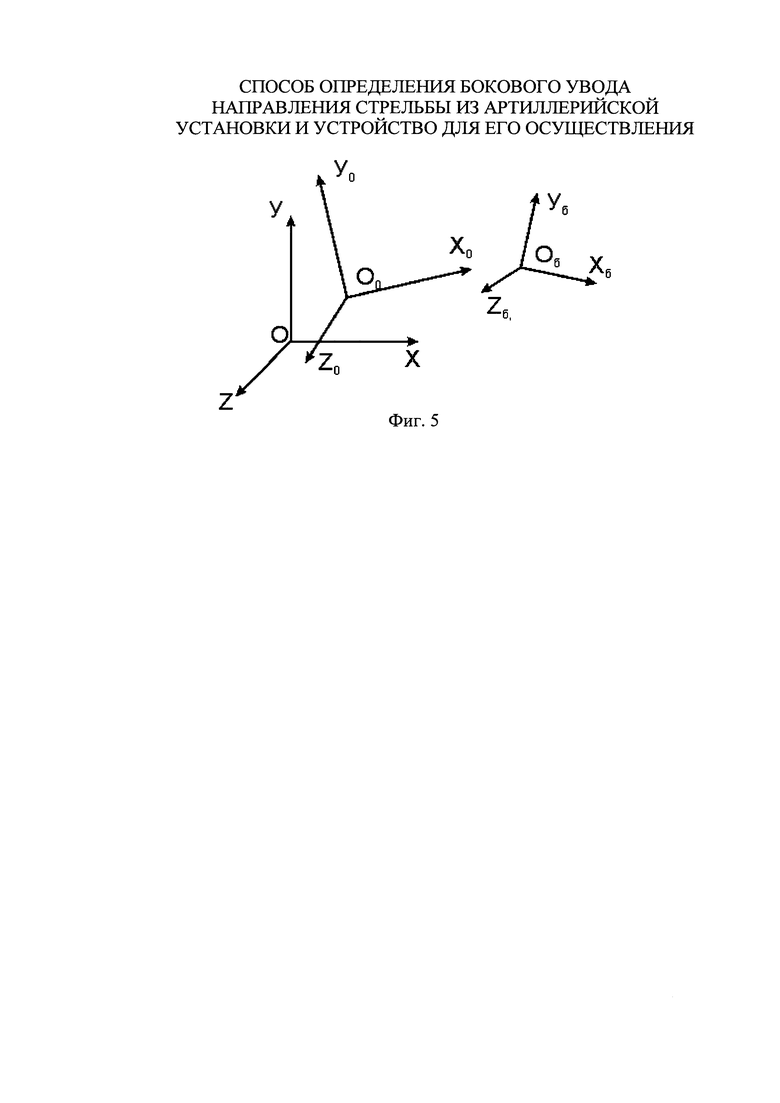
- на Фиг. 5 показаны системы координат, используемые в алгоритмах обработки результатов измерений.
Предлагаемое устройство для определения бокового увода направления стрельбы из артиллерийской установки содержит:
измеритель увода оси канала ствола от вертикальной плоскости при изменении угла возвышения ствола, выполненный в виде модуля измерителя угловых перемещений ствола (ИУПС), имеющего центрирующий хвостовик 1, снабженный рукоятками поворота 2 и вставляемый в дульную часть ствола 3, а также измерительный блок (вставляемый в хвостовик 1 с помощью конуса Морзе 4 и закрепленный на нем с помощью регулировочных винтов 5), содержащий опорную плиту 6 с установленным на ней малогабаритным трехосным измерительным модулем 7, включающим трехосный гироскопический датчик угла (на чертеже не показан) и трехосный датчик ускорений (на чертеже не показан), изготовленные, например, по технологии МЭМС.
В качестве измерительного модуля 7 целесообразно применять модуль STIM300 норвежской компании Sensonor. При этом опорная плита 6 измерительного блока соединена с конусом Морзе 4 через регулируемую шаровую опору 8, позволяющую регулировать ее угловые положения.
Следует отметить то, что устройство для определения угловых перемещений ствола, выполненное в виде измерителя угловых перемещений ствола (ИУПС), можно использовать не только для измерения увода оси канала ствола в горизонтальной плоскости при изменении угла возвышения ствола, но и для ряда других измерений угловых перемещений ствола, например, при проведении контроля точности наведения и состояния АУ и согласования контрольной площадки на стволе с осями АУ.
ИУПС может быть использован при проведении подобных работ на различных АУ широкого диапазона калибров.
Хвостовик 1 является индивидуальным для каждого вида АУ. Измерительный блок является универсальным для разных видов АУ и может комплектоваться с любым АУ.
Перпендикулярность граней опорной плиты 6 должна выполняться с высокой точностью, а измерительный модуль 7 должен устанавливаться на площадке таким образом, чтобы его опорные поверхности, представляющие измерительную систему координат гироскопов и акселерометров, были параллельны граням параллелепипеда опорной плиты 6.
Предлагаемое устройство работает следующим образом.
1. При определении бокового увода направления стрельбы из артиллерийской установки (увода базовой оси ствола по горизонту при вертикальном наведении) механизмами вертикального и горизонтального наведения с использованием квадранта (на чертеже не показаны) выставляют горизонтальное расположение контрольной площадки (на чертеже не показана).
В дульную часть ствола 3 вставляют модуль ИУПС. С помощью разворота центрирующего хвостовика 1 вокруг оси ствола 3 через 90° и регулировки положения измерительного блока относительно хвостовика 1 в перпендикулярных направлениях добиваются совмещения продольной измерительной оси модуля ИУПС с базовой осью ствола 3 и обнуляют гироскопический модуль 7. При этом система осей модуля ИУПС совпадает с неподвижной системой координат (НСК), две оси которой горизонтальны.
Изменяя угол возвышения ствола подъемным механизмом (на чертеже не показан) в ручном или автоматизированном режиме вверх и вниз в диапазоне от минимального до максимального угла, измеряют с помощью измерительного модуля ИУПС углы возвышения, азимута и крена. По величине азимутального угла гироскопического модуля определяют боковой угловой увод оси канала ствола 3 по горизонту. С помощью формул (1) и (2) вычисляют параметры, определяющие боковой увод ствола: непараллельность оси цапф орудия контрольной площадке на казеннике орудия Δцкп и неперпендикулярность оси цапф базовой оси канала ствола Δцос.
Результаты измерений и вычислений заносят в паспорт АУ и используют в дальнейшем в системе наведения АУ при наводке АУ во время стрельбы.
2. Алгоритмы обработки результатов измерений
2.1. Общие положения
Системы координат, используемые в алгоритмах, приведены на Фиг. 5.
За неподвижную систему координат (далее НСК) принята правая декартова система координат OXYZ, связанная с Землей. Оси X и Ζ расположены в горизонтальной плоскости, ось Y системы вертикальна и направлена вверх.
За систему координат АУ/орудия/ (далее СКор) принята такая система координат, при которой ось ОХ0 совпадает с базовой осью ствола, ось ΟY0 вертикальна, а ось ΟΖ0 перпендикулярна им (в идеальном случае она совпадает с осью цапф).
При положении на «нулевом» угле возвышения СКор совпадает с НСК.
С измерительным блоком связана система координат ОбХбYбZб (далее СКб), которая совмещается с СКор, если ось Хб совмещена с базовой осью ствола, а ось Yб - с осью Yо.
Обозначим орты систем координат СКор и СКб и их проекции (направляющие косинусы) на оси НСК следующим образом:
для СКор: ось Хо - l(lx,ly,lz); ось Yo - v(vx,vy,vz); ocь Zо - с(cx,cy,cz);
для СКб: ось Хб - 
Матрица A пространственного преобразования координат в терминах углов Эйлера имеет вид:

где ψ, ν, γ - углы Эйлера (угол азимута, возвышения и крена соответственно).
При повороте системы координат вокруг произвольной оси n(nx,ny,nz) на угол φn можно использовать матрицу:
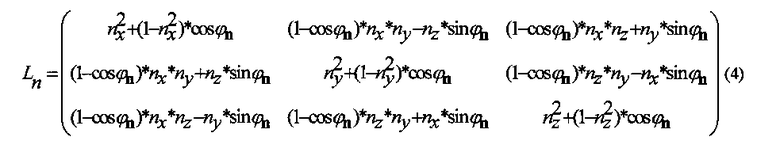
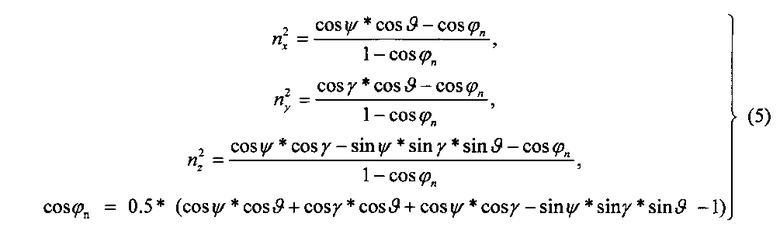
Приравнивая три линейно-независимых члена транспонированной матрицы Ln и соответствующие элементы матрицы A, можно определить направляющие косинусы nx, ny, nz вектора оси поворота на оси неподвижной системы координат НСК (Χ, Υ, Z):
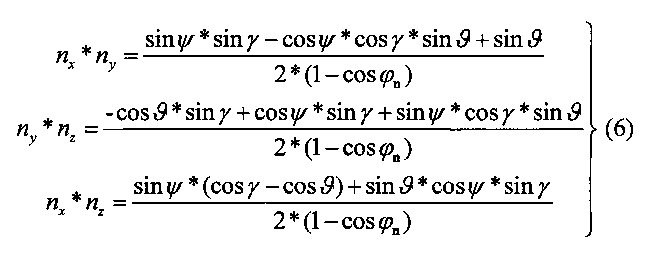
или, приравнивая соответствующие суммы членов матриц Ln и А
(l12+l21) и (а12+a21), (l13+l31) и (а13+а31), (l32+l23) и (а32+а23),
получим:
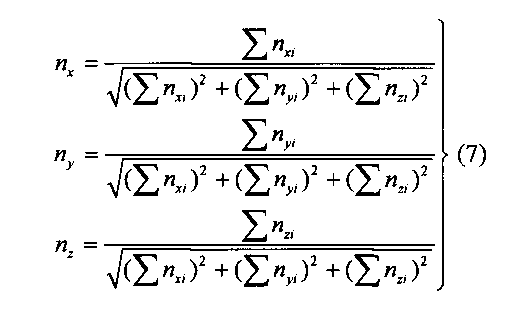
Каждому углу поворота соответствует свое сочетание углов Эйлера (ψi, νi, γi) и, при наличии биения оси поворота, свое сочетание направляющих косинусов оси вращения (nxi, nyi, nzi). Усредненная ось вращения находится при минимизации функционала:
 ,
,
откуда получим:
2.2. Алгоритм операции совмещения продольной оси ИУПС с базовой осью ствола (Хб=Хо)
Перед проведением операции поворотом хвостовика ИУПС опорную плиту 6 горизонтируют в поперечном направлении, после чего в гироскопическом модуле (на чертеже не показан) измерительного модуля 7 ИУПС устанавливают нули.
Затем осуществляют три поворота ИУПС вокруг оси ствола 3 на 90° по показаниям ИУПС (всего на 270°).
При развороте текущие направляющие косинусы оси ствола определяют из выражений:
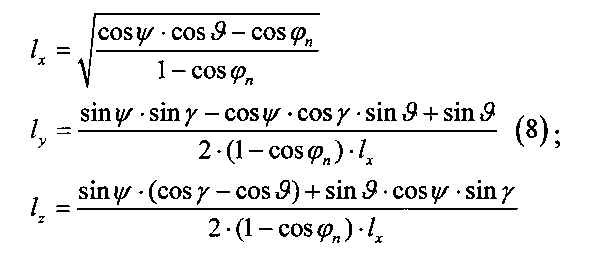
Среднее значение вычисляют по выражению:
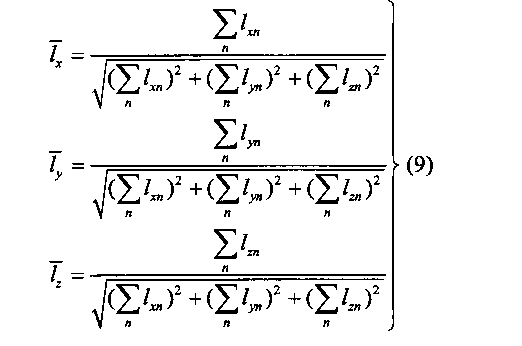
Для совмещения осей X СКб и СКор поворачивают вектор продольной оси ИУПС в собственной системе координат на угол α в вертикальной и на угол β в горизонтальной плоскостях с помощью регулируемой шаровой опоры 8 таким образом, чтобы его проекции на оси СКб совпали со средними значениями направляющих косинусов базовой оси ствола по выражению (9), где
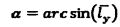 ,
,  .
.
После совмещения осей необходимо отгоризонтировать опорную плиту 6 ИУПС по крену поворотом центрирующего хвостовика 1 вокруг его оси, по углу возвышения - механизмом вертикального наведения АУ (орудия), и снова обнулить показания гироскопического модуля измерительного модуля 7 ИУПС.
2.3. Алгоритм определения углов непараллельности оси цапф плоскости контрольной площадки и неперпендикулярности оси цапф базовой оси канала ствола
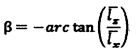
Для определения истинного положения вектора оси цапф осуществляют в соответствии с пунктом 1 разворот качающейся части орудия вокруг оси цапф. Качающуюся часть поворачивают на всем диапазоне углов возвышения, снимая угловые отсчеты гироскопического модуля измерительного модуля 7 ИУПС (ψ, ν, γ) с равномерным шагом в 5…6 точках. При этом текущие направляющие косинусы оси цапф определяют из выражений (5) и (6) (обозначения ортов оси поворота качающейся части приняты в соответствии с п. 2.1. общих положений алгоритмов обработки результатов измерений):
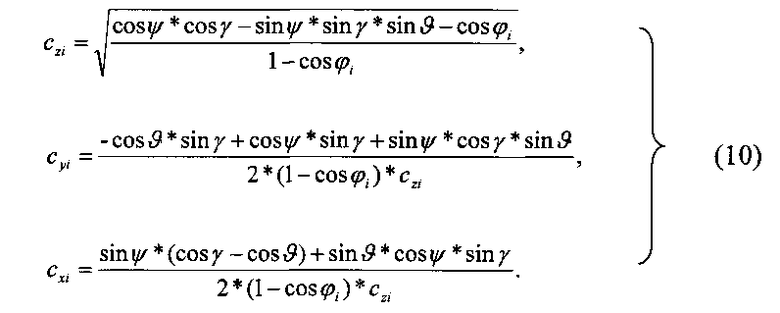
Средние значения вычисляют по выражению (8)
Из проекций вектора оси цапф на ось ствола и вертикальную ось по формуле (1) получим:
величина непараллельности оси цапф орудия контрольной площадке на казеннике АУ (орудия) Δцкп=arcSin(Cy);
величина неперпендикулярности оси цапф базовой оси канала ствола определяется по формуле: Δцос=arcSin(Cx).
2.4. Алгоритм определения поправки на боковой увод по параметрам непараллельности оси цапф плоскости контрольной площадки и неперпендикулярности оси цапф базовой оси канала ствола
Используя матрицу поворота (4) вектора оси ствола  вокруг вектора оси цапф
вокруг вектора оси цапф  на угол возвышения φ, получим:
на угол возвышения φ, получим:

отсюда имеем формулу (2) для бокового увода ствола при изменении угла возвышения в зависимости от параметров бокового увода Δцос и Δцкп:
 .
.
Использование предлагаемой группы изобретений позволяет:
1. Обеспечить проведение работ по контролю бокового увода базовой оси ствола АУ при изменении угла возвышения.
2. Обеспечить контроль правильности отработки углов наведения орудия при операциях технического обслуживания АУ.
3. Обеспечить непосредственное измерение увода за счет применения специального устройства и специального алгоритма проведения работ.
4. Повысить точность измерения, уменьшить трудоемкость и сократить время операции измерения бокового увода базовой оси ствола при наведении АУ по углу возвышения.
5. Повысить точность автоматизированного наведения орудия в процессе стрельбы за счет использования параметров бокового увода, точно определенных заявляемым способом.
6. Повысить удобство работы для обслуживающего персонала.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОДГОТОВКИ КОНТРОЛЬНОЙ ПЛОЩАДКИ ДЛЯ СОГЛАСОВАНИЯ АГРЕГАТОВ УПРАВЛЕНИЯ СТРЕЛЬБОЙ ИЗ АРТУСТАНОВКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2572178C1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОМАТИЧЕСКОЙ СТРЕЛЬБОЙ АРТИЛЛЕРИЙСКОЙ УСТАНОВКИ (АУ) | 2004 |
|
RU2287761C2 |
| ПЕРЕНОСНОЙ ПРОТИВОЛАВИННЫЙ КОМПЛЕКС | 2013 |
|
RU2542676C2 |
| СПОСОБ ИСПЫТАНИЙ МИНОМЕТНОГО ВЫСТРЕЛА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2002 |
|
RU2228512C2 |
| АРТИЛЛЕРИЙСКОЕ ОРУДИЕ С ВЫКАТОМ "ТЬМАКА" | 2007 |
|
RU2363908C2 |
| АРТИЛЛЕРИЙСКОЕ ОРУДИЕ С ДУЛЬНЫМ ТОРМОЗОМ | 2012 |
|
RU2498186C1 |
| ОГНЕСТРЕЛЬНОЕ ОРУДИЕ НЕФЕДОВА-ЛЕВКИНА | 1996 |
|
RU2143093C1 |
| СПОСОБ БЕССТРЕЛЬБОВОГО ОПРЕДЕЛЕНИЯ И УЧЕТА ОТКЛОНЕНИЯ СНАРЯДОВ ОТ ЦЕЛИ | 2001 |
|
RU2195623C1 |
| СПОСОБ УПРАВЛЕНИЯ ВООРУЖЕНИЕМ | 2005 |
|
RU2298759C1 |
| САЛЮТНАЯ ПУШКА | 2003 |
|
RU2243473C9 |
Предлагается высокоэффективная группа изобретений в области артиллерии, включающая способ определения бокового увода направления стрельбы из артиллерийской установки (далее АУ) и устройство для его осуществления. Предлагаемый способ заключается в том, что сначала расстопаривают ствол АУ из положения «по-походному», после этого устанавливают ствол в горизонтальное положение и горизонтируют АУ с использованием уровня на контрольной площадке а затем производят подготовку элементов и блоков системы к измерениям, после чего измеряют величину увода направления стрельбы при изменении угла возвышения ствола и по величине рассогласования судят о величине бокового увода направления стрельбы, а при ведении стрельбы поправку на боковой увод направления стрельбы вводят в систему управления наведением АУ на цель, при этом горизонтирование ствола и оси цапф АУ выполняют либо разворотом башни, либо вращающейся части станка АУ, а величину бокового увода оси ствола от вертикальной плоскости определяют измерением при изменении углов вертикального наведения АУ с помощью специального устройства - измерителя угловых перемещений ствола (ИУПС), и по результатам измерений углового положения ствола с помощью ИУПС определяют величины непараллельности оси цапф орудия контрольной площадке на казеннике АУ и неперпендикулярности оси цапф базовой оси канала ствола, после чего по полученным параметрам определяют поправку на боковой увод направления стрельбы из АУ. Предложено также оригинальное устройство для реализации указанного способа, выполненное в виде измерителя угловых перемещений ствола, имеющего центрирующий хвостовик, вставляемый в дульную часть ствола, и измерительный блок, вставляемый в центрирующий хвостовик с помощью конуса Морзе и содержащий опорную плиту с установленным на ней малогабаритным измерительным модулем, включающим трехосный гироскопический датчик угла и трехосный датчик ускорений, при этом опорная плита измерительного блока соединена с конусом Морзе через регулируемую шаровую опору. 2 н.п. ф-лы, 5 ил.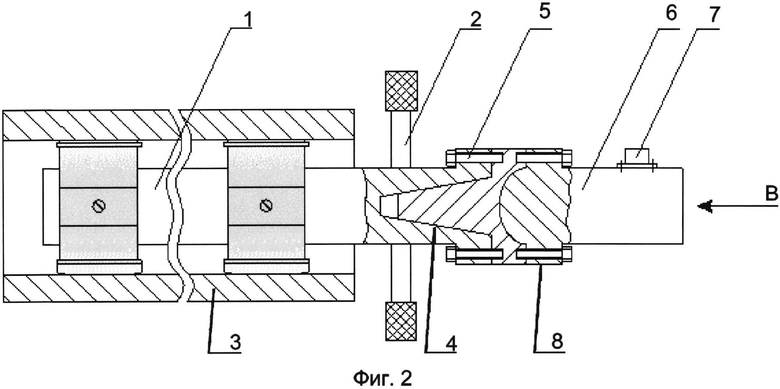
1. Способ определения бокового увода направления стрельбы из артиллерийской установки (далее АУ), согласно которому сначала расстопаривают ствол АУ из положения «по-походному», после этого устанавливают ствол в горизонтальное положение и горизонтируют АУ с использованием уровня на контрольной площадке, а затем производят подготовку элементов и блоков системы к измерениям, после чего измеряют величину увода направления стрельбы при изменении угла возвышения ствола и по величине рассогласования судят о величине бокового увода направления стрельбы, а при ведении стрельбы поправку на боковой увод направления стрельбы вводят в систему управления наведением АУ на цель, отличающийся тем, что
- горизонтирование ствола и оси цапф орудия выполняют либо разворотом башни, либо вращающейся части станка АУ,
- величину бокового ухода оси ствола от вертикальной плоскости определяют непосредственным измерением при изменении углов вертикального наведения орудия с помощью специального устройства - измерителя угловых перемещений ствола (ИУПС);
- по результатам измерений углового положения ствола с помощью ИУПС вычисляют величины непараллельности оси цапф орудия контрольной площадке на казеннике АУ и неперпендикулярности оси цапф базовой оси канала ствола Δцос по формуле:
 ,
,
где Δцкп - величина непараллельности оси цапф АУ (орудия) контрольной площадке на казеннике;
Δцос - величина неперпендикулярности оси цапф базовой оси канала ствола;
Cx, Cy - направляющие косинусы оси цапф,
после этого по полученным параметрам непараллельности оси цапф АУ контрольной площадке Δцкп и неперпендикулярности оси цапф базовой оси Δцос определяют поправку на боковой увод направления стрельбы из АУ по формуле:
 ,
,
где δψ(φ) - поправка на боковой увод;
φ - угол возвышения ствола,
после чего определенную поправку вводят в систему управления наведением АУ на цель.
2. Устройство для определения бокового увода направления стрельбы из артиллерийской установки, выполненное в виде измерителя угловых перемещений ствола (ИУПС), имеющего центрирующий хвостовик, вставляемый в дульную часть ствола, и измерительный блок, вставляемый в центрирующий хвостовик с помощью конуса Морзе и содержащий опорную плиту с установленным на ней малогабаритным измерительным модулем, включающим трехосный гироскопический датчик угла и трехосный датчик ускорений, при этом опорная плита измерительного блока соединена с конусом Морзе через регулируемую шаровую опору.
| US 3766778 A, 23.10.1973 | |||
| US 2012211591 А1, 23.08.2012 | |||
| RU 94009649 A1, 27.04.1996 | |||
| СПОСОБ ВИЗИРОВАНИЯ | 2011 |
|
RU2481603C1 |

