Предлагаемое изобретение относится к области артиллерии, а более конкретно - к технологии изготовления стволов артустановок (далее АУ).
Известно, что для согласования устройств (агрегатов) управления стрельбой и наведения артустановки, а также контроля правильности отработки углов прицеливания в процессе эксплуатации АУ на казеннике ствола создается контрольная площадка, которая параллельна оси цапф и оси канала ствола в дульной части (базовой оси ствола) (см., например, книгу Иванова В.А. и Горового Ю.Б. «Устройство и эксплуатация артиллерийского вооружения российской армии, ТГТУ», 2005, с. 19, а также см. книгу «ИЗДЕЛИЕ 2С1, Инструкция по эксплуатации 2С1.00.001 ИЭ» (открытое издание, 2000, с. 127).
Известны различные способы изготовления стволов АУ (см., например, патенты РФ на изобретения NN 2164202, F41A 21/00, 1999; 2419757, F41A 21/00, 2010 и др.), в которых не раскрыты способы подготовки контрольной площадки на стволе АУ.
Но авторам из многолетней практики известно, что традиционно контрольную площадку формируют на казеннике АУ, а затем прирабатывают (пришабривают) на собранном стволе АУ. Для обеспечения операции приработки в дульную часть ствола, установленного на контрольном столе, вставляют калибр с площадкой для квадранта. На калибр устанавливают квадрант в направлении оси ствола. Изменением углового положения ствола и поворотом калибра добиваются горизонтальности площадки для квадранта на калибре (контроль ведут по квадранту). Затем контрольную площадку на стволе пришабривают в горизонт, добиваясь параллельности плоскости контрольной площадки и базовой оси канала ствола.
Как показала практика, указанный способ подготовки контрольной площадки имеет ряд существенных недостатков:
во-первых, калибр вставляют в канал ствола с некоторым перекосом из-за зазоров в опорной поверхности, что приводит к непараллельности контрольной площадки и базовой оси ствола;
во-вторых, параллельность контрольной площадки и оси цапф обеспечивают точностью изготовления люльки, установки оси цапф на ней, исполнения узла, предотвращающего разворот ствола в люльке и соответствующей системой допусков, что приводит к существенной непараллельности контрольной площадки и оси цапф, что при стрельбе на больших углах возвышения приводит к значительному боковому уводу линии стрельбы.
Для учета этого явления производят измерение увода оси канала ствола в вертикальной плоскости при изменении угла возвышения ствола, который затем учитывают с помощью системы управления наведением АУ. Этот контроль осуществляют с помощью теодолита, которым визируют на линию на дульном срезе ствола. Эти измерения очень трудоемки и имеют низкую точность, особенно для АУ, стреляющих на больших углах возвышения. При современных требованиях к точности стрельбы вновь создаваемых АУ получаемая при этом точность учета бокового увода недостаточна.
Задачей, на решение которой направлено заявляемое изобретение, является расширение арсенала имеющихся технических средств, связанных с дальнейшим повышением эффективности использования систем обеспечения точности стрельбы АУ, а также расширения области их использования за счет обеспечения возможности измерения параметров АУ, определяющих точность ее наведения.
Указанная задача решается в первую очередь за счет технического результата от использования предлагаемого изобретения, заключающегося:
во-первых, в существенном повышении точности подготовки контрольной площадки;
во-вторых, в существенном снижении бокового увода ствола от вертикальной плоскости при изменении угла возвышения ствола;
в-третьих, в упрощении и уменьшении трудоемкости проведения операции контроля технического состояния системы наведения АУ при проведении операций технического обслуживания АУ.
Указанный технический результат достигается тем, что подготовку контрольной площадки для согласования агрегатов управления стрельбой из АУ производят следующим образом:
- ствол с подготовленной к приработке контрольной площадкой устанавливают на АУ;
- механизмами вертикального (ВН) и горизонтального (ГН) наведения с использованием квадранта на контрольной площадке выставляют приблизительное горизонтальное расположение ствола АУ;
- в дульный срез ствола вставляют измеритель угловых перемещений ствола (далее ИУПС) и обнуляют его показания;
- приводом ГН осуществляют разворот вращающейся части АУ вокруг оси, измеряя последовательно в 8-12 точках угловое положение измерительного блока ИУПС;
- по измеренным значениям определяют угловое пространственное положение оси вращения АУ по горизонту и угол разворота ствола, при котором наклон оси вращения в плоскости ствола либо максимальный, либо минимальный, - угол максимального склона;
- по показаниям ИУПС приводом ГН приводят ось ствола на угол максимального склона, а приводом ВН - в горизонтальное положение и устанавливают нулевые значения в измерительном блоке;
- серией последовательных поворотов вокруг оси ствола и регулировкой положения измерительного блока относительно хвостовика добиваются совмещения его продольной измерительной оси с базовой осью ствола;
- приводом вертикального наведения (ВН) и поворотом хвостовика ИУПС, опираясь на результаты измерений измерительного блока ИУПС, устанавливают опорную площадку ИУПС (базовую ось ствола) в горизонтальной плоскости и обнуляют показания измерительного блока ИУПС (при этом система измерительных осей датчиков ИУПС совпадает с неподвижной системой координат, связанной с Землей);
- приводом ВН осуществляют разворот качающейся части вокруг оси цапф во всем диапазоне углов возвышения орудия, измеряя с использованием ИУПС угловое положение ствола последовательно в 5-10 точках;
- по измеренным значениям определяют угловое пространственное положение оси цапф, непараллельность оси цапф орудия горизонту и неперпендикулярность оси цапф базовой оси канала ствола, а также оптимальный угол непараллельности оси цапф контрольной площадке, при котором боковой увод ствола при изменении угла возвышения будет минимальным;
- по показаниям ИУПС приводом ГН поворачивают ствол таким образом, чтобы угол крена был равен оптимальному углу непараллельности оси цапф контрольной площадке, а приводом ВН - в горизонтальное положение;
- после чего в этом положении контрольную площадку пришабривают в горизонт в продольном и поперечном направлениях.
Горизонтальное положение приработанной таким образом контрольной площадки обеспечивает минимальный боковой увод оси ствола во всем диапазоне углов возвышения, предусмотренном конструкторской документацией.
После завершения обработки осуществляют контрольную проверку увода базовой оси ствола по горизонту при вертикальном наведении.
Для реализации указанного способа авторами предлагается оригинальное устройство для подготовки контрольной площадки для согласования агрегатов управления стрельбой из АУ.
Задачей, на решение которой направлено заявляемое изобретение, является расширение арсенала имеющихся технических средств, связанных с дальнейшим повышением эффективности использования систем средств обеспечения точности стрельбы АУ, а также путем расширения области их использования за счет обеспечения возможности измерения положения осей вращения орудия по вертикали и горизонту, а также непосредственного измерения бокового увода оси ствола при изменении угла возвышения ствола орудия.
Указанная задача решается в первую очередь за счет технического результата от использования предлагаемого изобретения, заключающегося,
во-первых, в существенном повышении точности подготовки контрольной площадки;
во-вторых, в существенном повышении точности измерения увода оси канала ствола АУ от вертикальной плоскости при изменении угла возвышения ствола;
в-третьих, в упрощении и уменьшении трудоемкости операции определения бокового увода направления стрельбы из АУ.
Указанный технический результат достигается тем, что устройство для подготовки контрольной площадки для согласования агрегатов управления стрельбой из АУ выполнено в виде измерителя угловых перемещений ствола, выполняющего роль измерителя положения базовой оси канала ствола в пространстве при вращении вокруг оси цапф и оси поворота вращающейся части (ВЧ) АУ, имеющего центрирующий хвостовик, вставляемый в дульную часть ствола и измерительный (базирующий) блок, вставляемый в хвостовик с помощью конуса Морзе и содержащий опорную плиту с установленным на ней малогабаритным измерительным модулем, включающим трехосный гироскопический датчик угла и трехосный датчик ускорений, при этом опорная плита измерительного блока соединена с конусом Морзе через регулируемую шаровую опору.
Предлагаемые способ и устройство подготовки контрольной площадки для согласования агрегатов управления стрельбой из АУ позволяют существенно повысить точность измерения увода оси канала ствола от вертикальной плоскости при изменении угла возвышения ствола, уменьшить величину бокового увода при рациональном расположении плоскости контрольной площадки относительно оси цапф орудия, упростить проведение операции определения бокового увода и уменьшить ее трудоемкость.
Предлагаемые способ и устройство пояснены иллюстрациями, на которых:
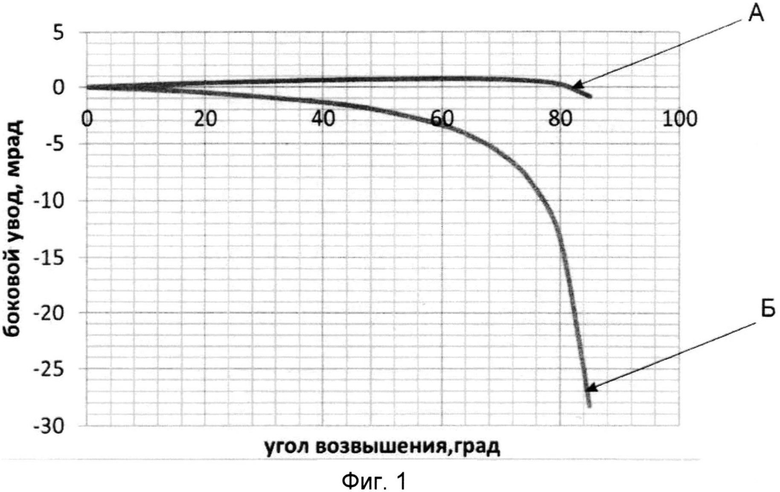
- на Фиг. 1 представлен график изменения бокового увода оси ствола при изменении угла возвышения для одного из образцов АУ: по стрелке Б - при угле между осью цапф и контрольной площадкой γ1=1.1 мрад, полученном при изготовлении изделия, и по стрелке А - оптимальном угле между осью цапф и контрольной площадкой γ2=-1.3 мрад; при этом неперпендикулярность оси ствола и оси цапф составляла 1,5 мрад;
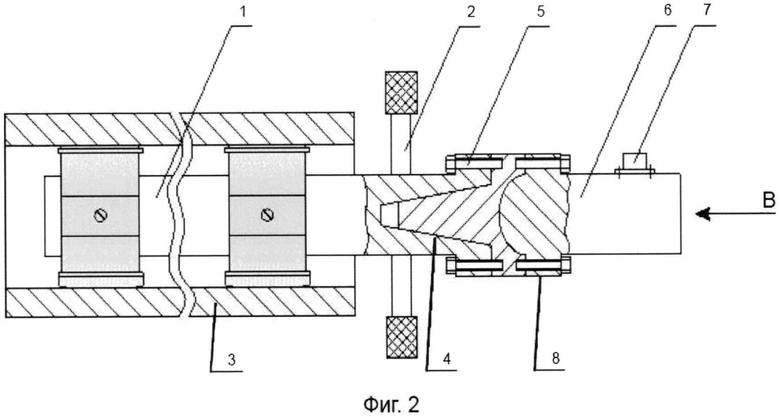
- на Фиг. 2 показана схема инерциального измерителя угловых перемещений ствола (ИИУПС),
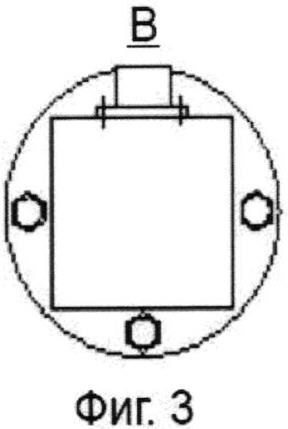
- на Фиг. 3 показан вид на ИУПС по стрелке В (см. Фиг. 2);
- на Фиг. 4 показана фотография измерительного модуля норвежской компании Sensosor.
Предлагаемое устройство для подготовки контрольной площадки для согласования агрегатов управления стрельбой из АУ - измеритель угловых перемещений ствола (далее ИУПС) содержит:
- центрирующий хвостовик 1, снабженный рукоятками поворота 2 и вставляемый в дульную часть ствола 3,
- измерительный (базирующий) блок (вставляемый в хвостовик 1 с помощью конуса Морзе 4 и закрепленный на нем с помощью регулировочных винтов 5), содержащий опорную плиту 6 с установленным на ней малогабаритным трехосным измерительным модулем 7, включающим трехосный гироскопический датчик угла и трехосный датчик ускорений (на чертеже не показаны), изготовленные, например, по технологии MEMS /в переводе: Микро-Электронно-Механические Системы/ (далее технология МЭМС). В качестве измерительного модуля 7 целесообразно применять модуль STIM300 норвежской компании SENSONOR /см. Фиг. 4/). При этом опорная плита 6 измерительного блока соединена с конусом Морзе 4 через регулируемую шаровую опору 8.
Измерительный блок имеет средства регулировки углового положения относительно хвостовика 1 и крепления к нему. Для поворота прибора вокруг продольной оси используются рукоятки 2.
Хвостовик 1 заявляемого устройства является индивидуальным для каждого вида АУ.
Измерительный блок является универсальным для разных видов АУ и может комплектоваться с любым хвостовиком.
Перпендикулярность граней опорной плиты 6 выполняется с высокой точностью. Измерительный модуль 7 устанавливается на площадке таким образом, чтобы его опорные поверхности, представляющие измерительную систему координат гироскопов и акселерометров, были параллельны граням параллелепипеда опорной плиты 6.
Предлагаемое устройство работает следующим образом:
1 Ствол с предварительно обработанной контрольной площадкой устанавливают на АУ. Механизмами вертикального (ВН) и горизонтального (ГН) наведения с использованием квадранта (на чертеже не показан) выставляют контрольную площадку (на чертеже не показана) в горизонтальное положение.
В дульную часть ствола 3 вставляют ИУПС.
Приводом ГН осуществляют разворот вращающейся части вокруг своей оси и, определив по данным ИУПС угол максимального склона, приводят продольную ось ствола на угол максимального склона, а приводом ВН - в горизонтальное положение и устанавливают нулевые значения в измерительном блоке.
Разворотом центрирующего хвостовика 1 вокруг оси ствола через 90° и регулировкой положения измерительного блока относительно хвостовика 1 в поперечном направлении добиваются совмещения продольной измерительной оси модуля ИУПС с базовой осью ствола 3. Горизонтируют опорную плиту 6 ИУПС в продольном направлении приводом ВН орудия, а в поперечном - поворотом хвостовика 1 вокруг оси ствола, после чего обнуляют показания гироскопического модуля. При этом система осей модуля ИУПС совпадает с неподвижной системой координат (НСК), две оси которой горизонтальны.
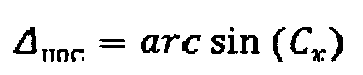
Изменяя угол возвышения ствола приводом ВН (на чертеже не показан) в диапазоне от минимального до максимального угла, измеряют с использованием ИУПС углы возвышения, азимута и крена. По величине изменения угла азимута определяют боковой увод оси канала ствола 3.
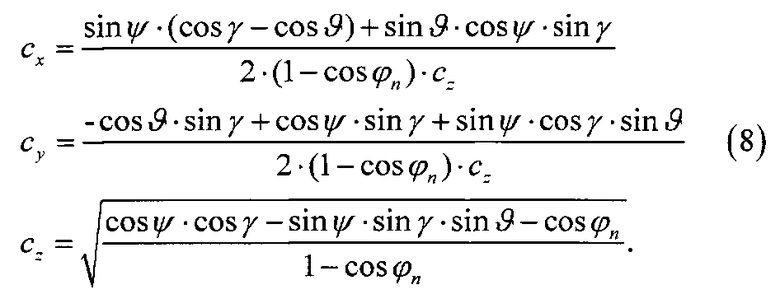
По результатам измерений вычисляют непараллельность оси цапф АУ горизонту (и контрольной площадке) Δцг, неперпендикулярность оси цапф базовой оси канала ствола Δцос и оптимальный угол непараллельности оси цапф контрольной площадке γοпт формулам:
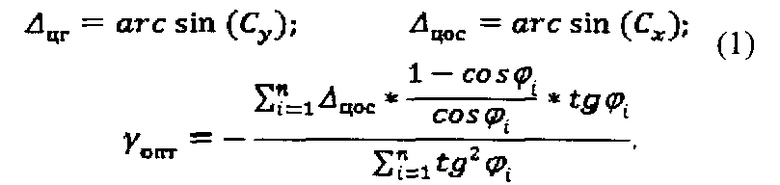
где Δцг - величина непараллельности оси цапф АУ горизонту (контрольной площадке АУ);
Δцг - величина неперпендикулярности оси цапф базовой оси канала ствола;
Сx, Сy - направляющие косинусы оси цапф;
γопт - оптимальный угол непараллельности оси цапф контрольной площадке;
φi(φ1…φn) - углы возвышения ствола.
По показаниям ИУПС приводом ГН устанавливают опорную площадку ИУПС таким образом, чтобы ось ИУПС, направленная вдоль оси цапф, была наклонена на расчетный угол оптимального наклона, а приводом ВН - чтобы ось ИУПС, направленная вдоль оси ствола, была горизонтальной. После проведения этих действий поверхность контрольной площадки обрабатывают в горизонт.
После завершения обработки осуществляют контрольную проверку ухода базовой оси ствола по горизонту при вертикальном наведении по вышеуказанной методике.
2. Алгоритмы обработки результатов измерений.
2.1 Общие положения
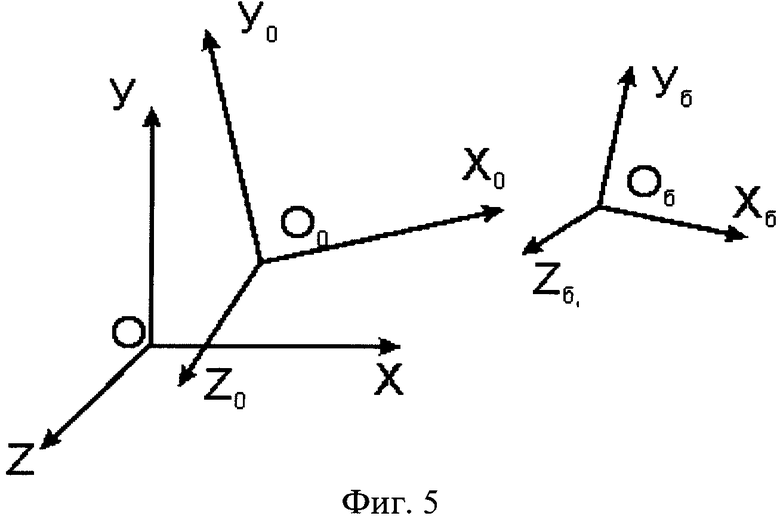
Системы координат, используемые в алгоритмах, приведены на Фиг. 5.
За неподвижную систему координат принята правая декартова система координат ΟΧΥΖ, связанная с Землей (НСК). Оси X и Ζ расположены в горизонтальной плоскости, ось Y системы вертикальна и направлена вверх.
За систему координат АУ /орудия/ (СКор) принята такая система координат, при которой ось ОХ0 совпадает с базовой осью ствола, ось ΟΥ0 вертикальна, а ось ΟΖ0 перпендикулярна им (в идеальном случае она совпадает с осью цапф).
При положении на «нулевом» угле возвышении СКор совпадает с НСК.
С измерительным блоком связана система координат OбXбYбZб (СКб), которую совмещают с СКор, если ось Xб совмещена с базовой осью ствола, а ось Yб с осью Yо.
Обозначим орты систем координат СКор и СКб и их проекции (направляющие косинусы) на оси НСК следующим образом:
для СКор: ось Xо-l(lx,ly,lz); ось Yо-v(vx,vy,vz); ocь Zо-c(cx,cy,cz);
для СКб: ось 
Матрица А пространственного преобразования координат в терминах углов Эйлера имеет вид:

где ψ, ν, γ - углы Эйлера (угол азимута, возвышения и крена соответственно)
При повороте системы координат вокруг произвольной оси n(nx,ny,nz) на угол φn можно использовать матрицу:

Приравнивая 3 линейно-независимых члена транспонированной матрицы Ln и соответствующие элементы матрицы А, можно определить направляющие косинусы nx, ny, nz вектора оси поворота на оси неподвижной системы координат НСК (Χ, Υ, Z):
или, приравнивая соответствующие суммы членов матриц Ln и А
(l12+l21) и (a12+a21), (l13+l31) и (a13+a31), (l32+l23) и (a32+a23),
получим:
Каждому углу поворота соответствует свое сочетание углов Эйлера (ψi, νi, γi) и при наличии биения оси поворота свое сочетание направляющих косинусов оси вращения (nxi, nyi, nzi). Усредненная ось вращения находится при минимизации функционала:
 ,
,
откуда получим:
2.2 Алгоритм операции совмещения продольной оси ИУПС с базовой осью ствола (Хб=Хо)
Перед проведением операции поворотом хвостовика 1 ИУПС опорную плиту 6 горизонтируют в поперечном направлении, после чего в гироскопическом модуле ИУПС устанавливают нули.
Затем осуществляют три поворота ИУПС вокруг оси ствола на 90° по показаниям ИУПС (всего на 270°).
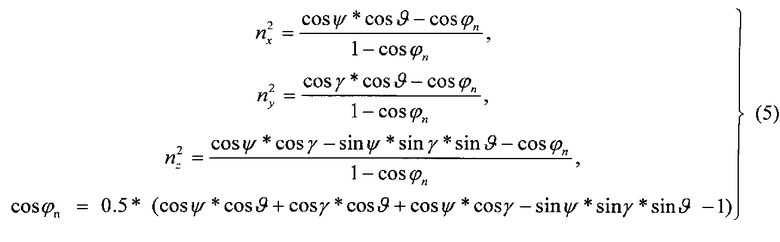
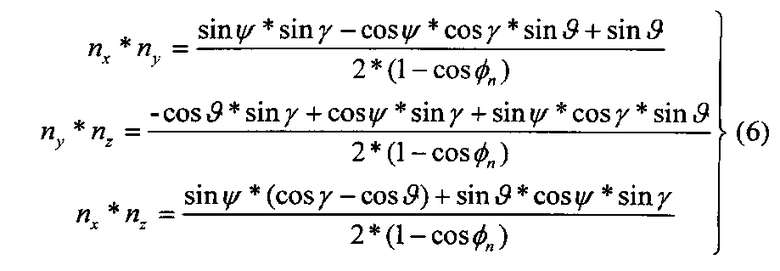
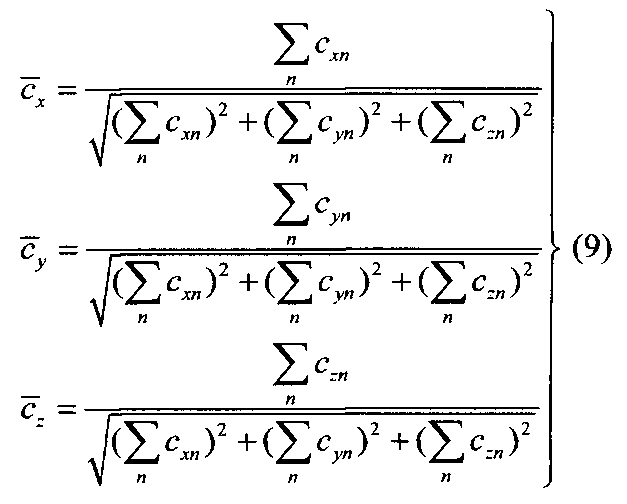
При развороте текущие направляющие косинусы оси ствола определяют из выражений (5) и (6):
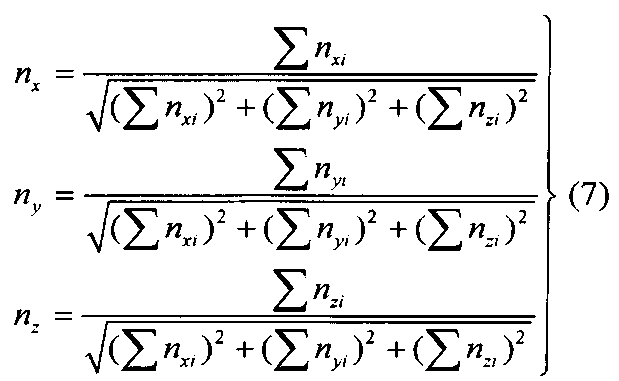
Среднее значение вычисляют по выражению (7)
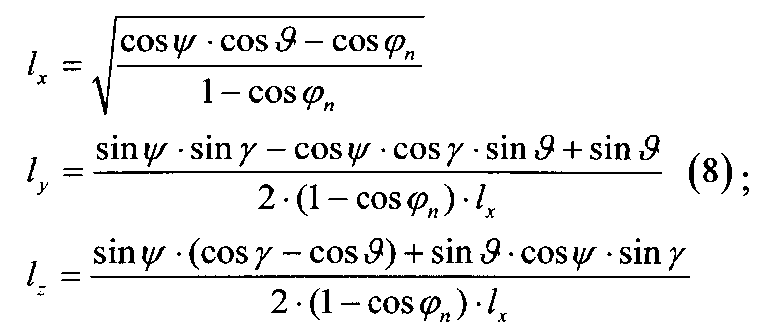
Для совмещения осей X СКб и СКор необходимо повернуть вектор продольной оси устройства в собственной системе координат на угол α в вертикальной и на угол β в горизонтальной плоскостях с помощью регулируемой шаровой опоры 8 таким образом, чтобы его проекции на оси СКб совпали со средними значениями направляющих косинусов базовой оси ствола по выражению (9), где

После совмещения осей необходимо отгоризонтировать опорную плиту 6 ИУПС по крену поворотом центрирующего хвостовика 1 вокруг его оси, по углу возвышения - механизмом вертикального наведения АУ, и снова обнулить показания гироскопического модуля ИУПС.
2.3 Алгоритм определения оси вращения вращающейся части (ВЧ) АУ и положения угла максимального склона
Для определения оси вращения ВЧ осуществляют ее поворот с помощью привода горизонтального наведения на допустимые углы разворота, снимая угловые отсчеты гироскопического модуля ИУПС (ψ, ν, γ) с равномерным шагом в 5..10 точках. При этом текущие направляющие косинусы оси вращения ВЧ определяют из выражений (5) и (6) /обозначения ортов оси поворота ВЧ приняты в соответствии с п. 1.1/:
 ,
,
 ;
;
 ;
;
Среднее значение вычисляют по выражению (5)
Угол поворота на направление угла максимального склона
 .
.
2.4. Алгоритм определения оптимального угла наклона контрольной площадки относительно оси цапф заключается в следующем:
Для определения истинного положения вектора оси цапф осуществляют разворот качающейся части АУ вокруг оси цапф. Качающуюся часть поворачивают на всем диапазоне углов возвышения, снимая угловые отсчеты гироскопического блока модуля ИУПС (ψ, ν, γ) с равномерным шагом в 5..10 точках. При этом текущие направляющие косинусы оси цапф определяют из выражений (3) и (4):
Среднее значение вычисляют по выражению (5)
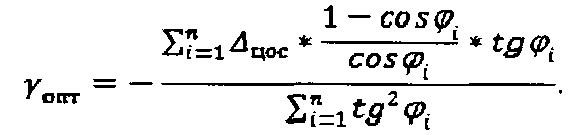
При этом средний угол Δцос отклонения от перпендикулярности осей ствола и цапф определяют как:
а оптимальный угол наклона цапф γοπт:
Затем приводами вертикального и горизонтального наведения АУ устанавливают опорную площадку ИУПС таким образом, чтобы ось ИУПС OXб, направленная вдоль оси ствола, была горизонтальной, а ось ИУПС ΟΖб, направленная вдоль оси цапф, была наклонена на расчетный угол оптимального наклона γοπт.
При таком положении ствола контрольную площадку обрабатывают (пришабривают) в горизонт.
Использование предлагаемого изобретения позволяет:
1. Существенно повысить точность подготовки контрольной площадки для согласования агрегатов управления стрельбой из АУ.
2. Существенно снизить боковой увод ствола АУ от вертикальной плоскости при изменении угла возвышения ствола.
3. Упростить и уменьшить трудоемкость проведения операции контроля технического состояния системы наведения при техническом обслуживании АУ во время ее эксплуатации.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ БОКОВОГО УВОДА НАПРАВЛЕНИЯ СТРЕЛЬБЫ ИЗ АРТИЛЛЕРИЙСКОЙ УСТАНОВКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2581997C2 |
| БОЕВАЯ МАШИНА РЕАКТИВНОЙ СИСТЕМЫ ЗАЛПОВОГО ОГНЯ НА БАЗОВОМ ШАССИ ТАНКА | 2000 |
|
RU2170905C1 |
| СПОСОБ ПРИСТРЕЛКИ АВТОМАТИЧЕСКОГО ДВУСТВОЛЬНОГО ОРУЖИЯ ЗЕНИТНОГО КОМПЛЕКСА | 2009 |
|
RU2401406C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ КОРРЕКЦИИ ПАРАМЕТРОВ СТАБИЛИЗАТОРА ВООРУЖЕНИЯ | 2017 |
|
RU2667664C1 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ С ЗАКРЫТЫХ ПОЗИЦИЙ ПО НЕНАБЛЮДАЕМОЙ ЦЕЛИ И СИСТЕМА УПРАВЛЕНИЯ ОГНЕМ ДЛЯ ЕЕ ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2444693C2 |
| ТРУБКА ХОЛОДНОЙ ПРИСТРЕЛКИ | 2004 |
|
RU2262650C1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОМАТИЧЕСКОЙ СТРЕЛЬБОЙ АРТИЛЛЕРИЙСКОЙ УСТАНОВКИ (АУ) | 2004 |
|
RU2287761C2 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ ПО ВОЗДУШНОЙ ЦЕЛИ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2002 |
|
RU2218544C2 |
| Способ определения оси канала ствола для выверки прицелов и устройство для его осуществления | 2024 |
|
RU2836658C1 |
| СПОСОБ СТРЕЛЬБЫ КОМПЛЕКСА ВООРУЖЕНИЯ БОЕВОЙ МАШИНЫ ПО ЦЕЛИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ, СПОСОБ ОПРЕДЕЛЕНИЯ ЭКСПЕРИМЕНТАЛЬНОЙ ЗАВИСИМОСТИ УГЛОВОЙ СКОРОСТИ ЛИНИИ ВИЗИРОВАНИЯ | 2012 |
|
RU2529241C2 |

Изобретение относится к военной технике и может быть использовано в артиллерийских установках (АУ). Устройство в виде измерителя угловых перемещений ствола для подготовки контрольной площадки (КП) для согласования агрегатов управления стрельбой из АУ содержит центрирующий хвостовик с измерительным блоком (ИБ), конус Морзе, опорную плиту с измерительным модулем с трехосным гироскопическим датчиком угла и трехосным датчиком ускорений, регулируемую шаровую опору. Устанавливают ствол на АУ, выставляют приблизительное горизонтальное расположение ствола АУ, вставляют измеритель угловых перемещений ствола (ИУПС) и обнуляют показания, осуществляют разворот вращающейся части (ВЧ) АУ вокруг оси вращения ВЧ, измеряют угловое положение измерительного блока ИУПС, определяют угловое пространственное положение оси вращения АУ по горизонту и угол разворота ствола, приводят по показаниям ИУПС ось ствола на угол максимального склона и устанавливают нулевые значения в измерительном блоке ИУПС, добиваются совмещения продольной измерительной оси ИБ ИУПС с базовой осью ствола, устанавливают опорную площадку ИУПС и обнуляют показания ИБ ИУПС, осуществляют разворот качающейся части вокруг оси цапф во всем диапазоне углов возвышения АУ, измеряют с помощью ИУПС угловое положение ствола последовательно в нескольких точках, определяют угловое пространственное положение оси цапф, непараллельность оси цапф орудия горизонту, неперпендикулярность оси цапф базовой оси канала ствола, оптимальный угол непараллельности оси цапф КП, поворачивают ствол в горизонтальное положение и для равенства угла крена оптимальному углу непараллельности оси цапф КП, пришабривают КП в горизонт в продольном и поперечном направлениях. Изобретение позволяет повысить точность подготовки КП, снизить боковой увод ствола АУ от вертикальной плоскости при изменении угла возвышения ствола. 2 н.п. ф-лы, 5 ил.
1. Способ подготовки контрольной площадки для согласования агрегатов управления стрельбой из артиллерийской установки (АУ), заключающийся в том, что сначала ствол с подготовленной к приработке контрольной площадкой устанавливают на АУ, затем механизмами вертикального (ВН) и горизонтального (ГН) наведения с использованием квадранта на контрольной площадке выставляют приблизительное горизонтальное расположение ствола АУ, после этого в дульный срез ствола вставляют измеритель угловых перемещений ствола (далее ИУПС) и обнуляют его показания, затем приводом ГН осуществляют разворот вращающейся части (ВЧ) АУ вокруг оси вращения ВЧ, измеряя угловое положение измерительного блока ИУПС, после чего по измеренным значениям определяют угловое пространственное положение оси вращения АУ по горизонту и угол разворота ствола, при котором наклон оси вращения в плоскости ствола либо максимальный, либо минимальный, - угол максимального склона; кроме этого, по показаниям ИУПС приводом ГН приводят ось ствола на угол максимального склона, а приводом ВН - в горизонтальное положение и устанавливают нулевые значения в измерительном блоке ИУПС, затем серией последовательных поворотов вокруг оси ствола и регулировкой положения измерительного блока ИУПС относительно хвостовика ИУПС добиваются совмещения его продольной измерительной оси с базовой осью ствола, после этого приводом вертикального наведения (ВН) и поворотом хвостовика ИУПС устанавливают опорную площадку ИУПС (базовую ось ствола) в горизонтальной плоскости и обнуляют показания измерительного блока ИУПС, затем приводом ВН осуществляют разворот качающейся части вокру оси цапф во всем диапазоне углов возвышения АУ, измеряя с использованием ИУПС угловое положение ствола последовательно в нескольких точках, после чего по измеренным значениям определяют угловое пространственное положение оси цапф, непараллельность оси цапф орудия горизонту, неперпендикулярность оси цапф базовой оси канала ствола, а также оптимальный угол непараллельности оси цапф контрольной площадке, при котором боковой увод ствола при изменении угла возвышения будет минимальным, после этого по показаниям ИУПС приводом ГН поворачивают ствол таким образом, чтобы угол крена был равен оптимальному углу непараллельности оси цапф контрольной площадке, а приводом ВН - в горизонтальное положение; в заключение в указанном положении контрольную площадку пришабривают в горизонт в продольном и поперечном направлениях.
2. Устройство для подготовки контрольной площадки для согласования агрегатов управления стрельбой из артиллерийской установки, выполненное в виде измерителя угловых перемещений ствола, имеющего центрирующий хвостовик, вставляемый в дульную часть ствола, и измерительный блок, вставляемый в хвостовик с помощью конуса Морзе и содержащий опорную плиту с установленным на ней измерительным модулем, включающим трехосный гироскопический датчик угла и трехосный датчик ускорений, при этом опорная плита измерительного блока соединена с конусом Морзе через регулируемую шаровую опору.
| ВЫСТРЕЛ ДЛЯ ГРАНАТОМЕТА | 2007 |
|
RU2354917C1 |
| СПОСОБ УВЕЛИЧЕНИЯ ДАЛЬНОСТИ ПОЛЕТА АРТИЛЛЕРИЙСКОГО СНАРЯДА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2003 |
|
RU2251068C1 |
| ЛАЗЕРНЫЙ ИСТОЧНИК ИОНОВ С МУЛЬТИПОЛЬНЫМ МАГНИТНЫМ ПОЛЕМ | 2008 |
|
RU2378735C1 |
| ПЛАСТИНА ДЛЯ ТОПЛИВНОГО ЭЛЕМЕНТА | 2006 |
|
RU2383087C2 |

