Нижеследующее в целом относится к совмещению данных изображения и описывается с конкретным применением к компьютерной томографии (КТ); однако в этом документе также предполагаются другие применения по визуализации.
Компьютерный томограф (КТ) обычно включает в себя неподвижный гентри и вращающийся гентри. Вращающийся гентри поддерживается с возможностью вращения неподвижным гентри и перемещает рентгеновскую трубку. Детектор располагается напротив рентгеновской трубки, поперек области обследования. Вращающийся гентри вращается вокруг области обследования относительно оси z, и излучение, выпущенное рентгеновской трубкой, пересекает область обследования и анатомию пациента в ней и обнаруживается детектором. Детектор формирует проекционные данные, указывающие облученную анатомию пациента. Блок восстановления восстанавливает проекционные данные и сформированные восстановленные данные изображения, указывающие облученную анатомию пациента.
КТ, а также другие устройства получения изображений могут использоваться для визуализации перфузии. Как правило, визуализация перфузии является подходом к визуализации для сбора информации, соответствующей протеканию жидкости (например, крови, лимфы и т.д.) через анатомическую ткань, и определению количества информации для упрощения идентификации состояния здоровья этой ткани или другой ткани. Например, визуализация перфузии миокарда может использоваться для измерения снабжения кислородом мышечной ткани в сердце. По существу, сердце пациента может изображаться в трех измерениях (3D) до и во время впрыскивания рентгеноконтрастного вещества, и отличия в восстановленных изображениях могут приписываться контрастному веществу, которое промывается в ткани. Мышечную ткань затем можно классифицировать в соответствии со степенью поглощения контрастного вещества, и можно обнаружить патологии, например инфаркт миокарда или коронарную окклюзию.
Проспективная ЭКГ-синхронизированная КТ использовалась ранее для визуализации перфузии миокарда. По этой методике, хотя некоторая или конкретная фаза сердца (например, систола, диастола и т.д.) выбирается для проспективной синхронизации, состояния движения сердца в разных периодах времени сердечного цикла могут отличаться. Это обычно обусловлено тем, что синхронизация с ЭКГ опирается на электрический сигнал, а не на фактическое механическое движение, и что изменение длины цикла сердца не учитывает проспективную синхронизацию. В результате периоды времени динамических измерений могут не выравниваться по вокселям, и такое несовпадение может вносить артефакты (искажения) в кривые временного поглощения контрастного вещества, что может приводить к ошибочным результатам анализа.
Аспекты настоящей заявки решают вышеуказанные и другие вопросы.
В соответствии с одним аспектом способ включает в себя совмещение набора данных 4-мерного изображения с контрастированием. Способ включает в себя совмещение данных изображения, соответствующих множеству разных периодов времени, с опорным изображением из одного из периодов времени. Набор данных 4-мерного изображения с контрастированием включает в себя данные изображения одного и того же исследуемого объема, полученные в разные периоды времени с изменяющимся контрастированием, причем исследуемый объем включает в себя подвижную структуру, и разные периоды времени соответствуют заранее установленной исследуемой фазе движения в разных циклах движения подвижной структуры.
В соответствии с другим аспектом система включает в себя компонент деформирования, который деформирует данные изображения в наборе данных 4-мерного изображения, чтобы совместить данные изображения с данными опорного изображения из набора данных 4-мерного изображения на основе алгоритма градиентного спуска. Данные изображения и данные опорного изображения соответствуют одному и тому же исследуемому объему и разным периодам времени. Система дополнительно включает в себя определитель подобия, который определяет значение, указывающее подобие между данными деформированного изображения и данными опорного изображения.
В соответствии с другим аспектом машиночитаемый носитель информации, кодированный командами, которые при выполнении процессором компьютера побуждают процессор: эластично совместить данные 4-мерного проспективного ЭКГ-синхронизированного изображения с контрастированием на основе алгоритма оптимизации методом стохастического градиентного спуска с адаптивным предсказанием величины шага в сочетании с показателем подобия, основывающийся на нормированной кросс-корреляции с нулевым средним.
Изобретение может принимать форму различных компонентов и схем компонентов, и различных этапов и схем этапов. Чертежи предназначаются только для целей иллюстрации предпочтительных вариантов осуществления и не должны толковаться как ограничивающие изобретение.
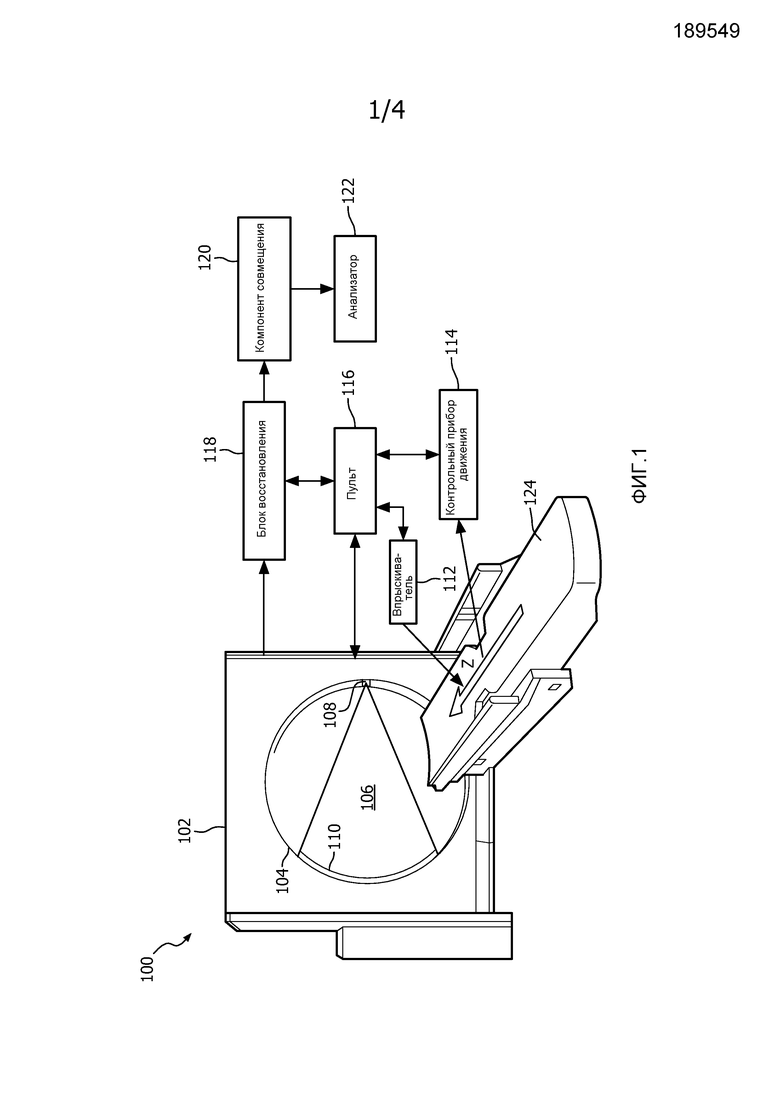
Фиг. 1 иллюстрирует систему визуализации применительно к компоненту совмещения данных изображения.
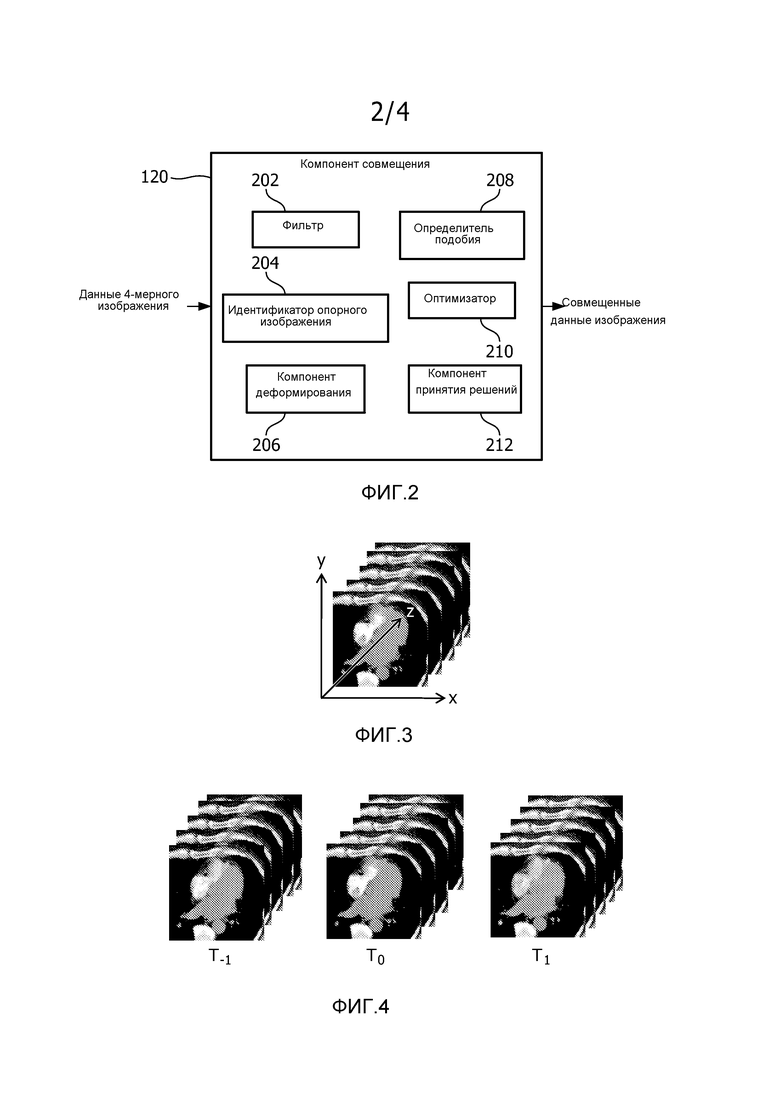
Фиг. 2 иллюстрирует примерный компонент совмещения.
Фиг. 3 иллюстрирует примерную пространственную фильтрацию данных 4-мерного изображения.
Фиг. 4 иллюстрирует примерную временную фильтрацию данных 4-мерного изображения.
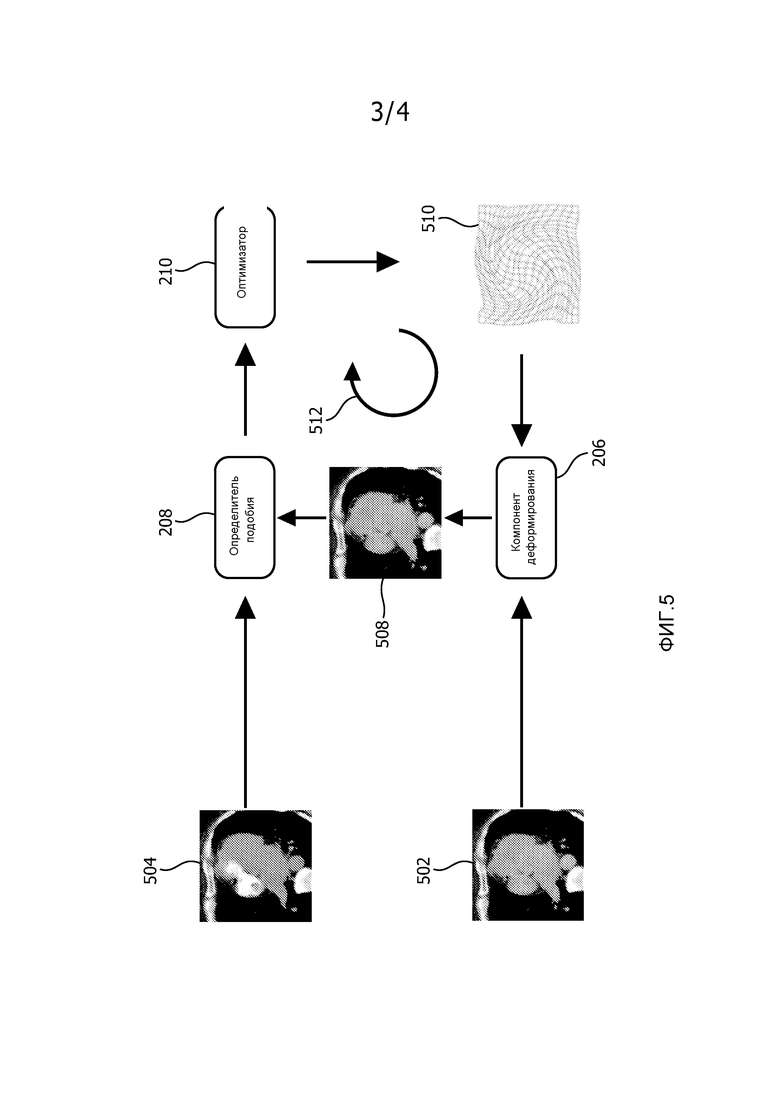
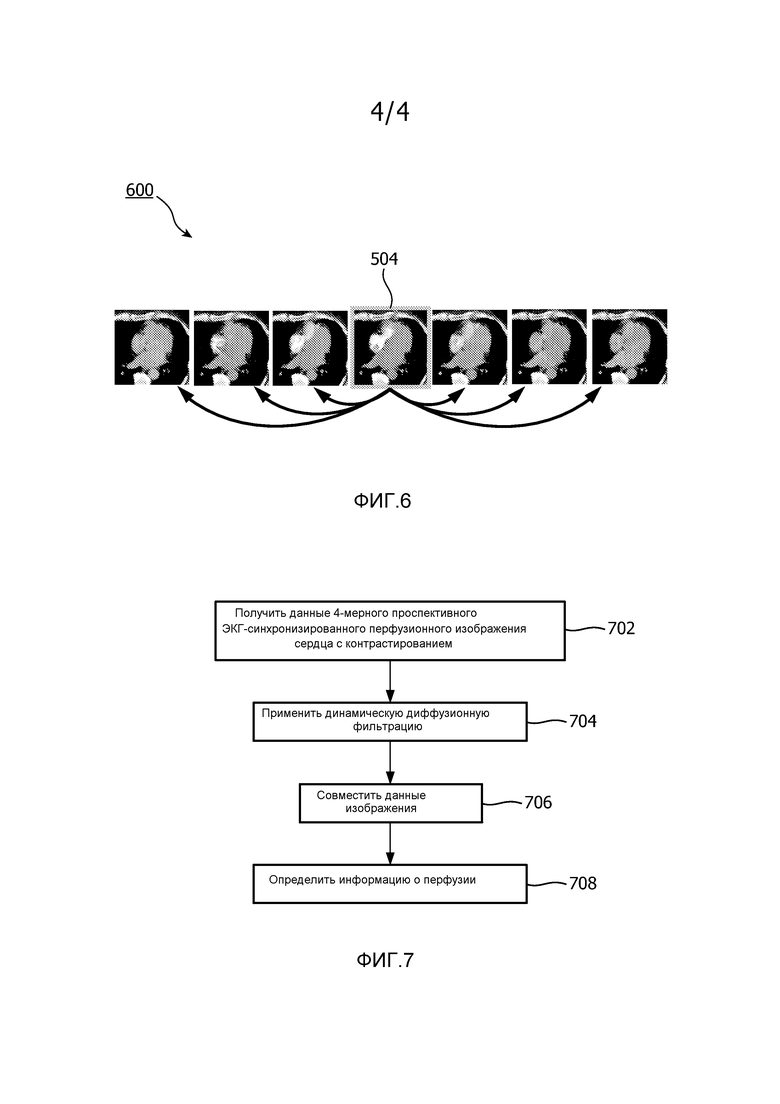
Фиг. 5 и 6 иллюстрируют примерное совмещение.
Фиг. 7 иллюстрирует примерный способ.
Фиг. 1 иллюстрирует систему 100 визуализации, например компьютерный томограф (КТ). Система 100 визуализации включает в себя неподвижный гентри 102 и вращающийся гентри 104, который поддерживается с возможностью вращения неподвижным гентри 102. Вращающийся гентри 104 вращается вокруг области 106 обследования относительно продольной оси или оси z. В проиллюстрированном варианте осуществления вращающийся гентри 104 конфигурируется для достаточно быстрого вращения для сканирования бьющегося сердца человека, например, для сканирования всего сердца в течение одного сердечного цикла. В одном примере проиллюстрированный вращающийся гентри 104 конфигурируется для поворота по меньшей мере за двести семьдесят миллисекунд (270 мс). Вращающийся гентри 104 также может поворачиваться за меньшее и большее время обращения.
Источник 108 излучения, например рентгеновская трубка, поддерживается вращающимся гентри 104 и вращается вместе с вращающимся гентри 104, и испускает излучение. Коллиматор источника коллимирует излучение, чтобы образовать конический, веерный, клиновидный или иным образом оформленный пучок излучения, который пересекает область 106 обследования. Чувствительная к излучению детекторная матрица 110, расположенная напротив источника 108, обнаруживает излучение, которое пересекает область 106 обследования, и формирует указывающие его проекционные данные. В проиллюстрированном варианте осуществления чувствительная к излучению детекторная матрица 110 достаточно большая, чтобы обнаружить излучение, пересекающее все сердце пациента за один раз. Для выполнения этого в одном варианте осуществления детекторная матрица 110 содержит по меньшей мере двести пятьдесят шесть (256) слоев или рядов детекторов. В другом варианте осуществления детекторная матрица 110 может иметь больше или меньше слоев или рядов.
Контрольный прибор или датчик движения 114 конфигурируется для восприятия состояния движения по меньшей мере заранее установленного исследуемого объема подвижного объекта или предмета в области 106 обследования и формирования указывающего его сигнала. Датчик 114 движения может включать в себя датчик сердечного, и/или дыхательного, и/или другого движения. Универсальная вычислительная система служит в качестве пульта 116 оператора, который включает в себя человекочитаемые устройства вывода, например дисплей и/или принтер, и устройства ввода, например клавиатуру и/или мышь. Программное обеспечение, постоянно находящееся в пульте 116, позволяет оператору управлять работой системы 100, например, позволяя оператору выбирать протокол сканирования (например, синхронизированный с ЭКГ или иначе протокол с контрастированием, который синхронизирует сканирование на основе сигнала от контрольного прибора 114 движения), инициировать сканирование и т.д. Впрыскиватель 112 конфигурируется для впрыскивания контрастного вещества (веществ), например, для процедуры визуализации с контрастированием. Проиллюстрированный впрыскиватель 112 управляется пультом 116. В другом примере контрастное вещество вводится вручную.
Блок 118 восстановления восстанавливает проекционные данные и формирует объемные данные изображения, указывающие область 106 обследования. Блок 118 восстановления может применять алгоритмы восстановления, которые охватывают различные угловые диапазоны, например, от ста восьмидесяти градусов (180°) плюс угол веерного пучка до трехсот шестидесяти градусов (360°) плюс угол веерного пучка, и/или другие диапазоны. Набор четырехмерных (4D) данных можно восстановить на основе данных, полученных в разные периоды времени. В одном примере каждый период времени может соответствовать разному циклу движения (например, сердечного, дыхательного и т.д.) или субфрагменту разных циклов движения. Субфрагмент может соответствовать заранее установленной и/или выбранной (например, сердечной, дыхательной и т.д.) исследуемой фазе (фазам) в каждом цикле. При визуализации сердца фаза может быть систолой, диастолой или другой фазой. В случае данных изображения с контрастированием данные изображения, соответствующие разному циклу движения/периодам времени, могут иметь разное контрастирование, представляющее поглощение и вымывание контрастного вещества в ткани во время сканирования.
Опора 124, например кушетка, поддерживает объект или предмет в области 106 обследования. Опора 124 может использоваться для различного расположения объекта или предмета в области 106 обследования относительно осей х, у и/или z до, во время и/или после сканирования. В одном примере опора 124 используется для расположения исследуемого объема, например сердца или другой ткани, в области 106 обследования, и затем весь исследуемый объем (или его существенная часть) сканируется с опорой 124 в том же положении. Примером такого сканирования является сканирование сердца, например проспективное ЭКГ-синхронизированное сканирование сердца с контрастированием. Для такого сканирования коллиматор источника коллимирует выпущенное излучение, чтобы создать пучок излучения с подходящим углом раствора пучка (направления х/у и/или z) для охвата исследуемого объема, детекторная матрица имеет подходящее количество слоев или рядов детекторов по оси z, чтобы обнаружить излучение, пересекающее исследуемый объем, и сердце сканируется во время выбранной фазы (фаз) каждого сердечного цикла или для некоторого выбранного подмножества сердечных циклов, например менее каждого из них.
Компонент 120 совмещения совмещает данные 4-мерного изображения или их заранее установленный субфрагмент. Как отмечалось выше, данные 4-мерного изображения могут включать в себя данные изображения, соответствующие разным циклам движения, и соответственно периодам времени. При исследованиях с контрастированием данные изображения, соответствующей одной и той же фазе движения в разных циклах движения и периодах времени, могут иметь разное контрастирование, отражающее поглощение и вымывание контрастного вещества в течение процедуры визуализации и времени. Как подробнее описано ниже, в одном примере алгоритм совмещения включает в себя итерационное эластичное совмещение на основе градиента с показателем подобия, который упрощает определение того, когда данные изображения совмещаются соответствующим образом. С помощью данных с контрастированием такой алгоритм может учитывать изменения в концентрации контрастного вещества в разные периоды времени и/или несогласованные состояния движения. Такой алгоритм может уменьшить артефакты из-за геометрического несовпадения, посредством этого предоставляя большую количественную точность для различных процедур визуализации, например визуализации КТ перфузии миокарда.
Анализатор 122 может использоваться для анализа совмещенных данных изображения. При перфузионных сканированиях анализатор 122 может использоваться для формирования перфузионных карт и/или перфузионных параметров, таких как время максимального накопления, площадь под кривой (то есть объем крови, циркулирующей через ткань), локальный максимум интенсивности или усиление, средний возрастающий наклон, максимальный подъем, время до максимального подъема и т.д. Такая информация может формироваться по вокселям, по исследуемым областям или на другой основе, например, по временной оси. Сформированные перфузионные карты и/или перфузионные параметры могут представляться по-разному, например, в виде перфузионных карт с цветной маркировкой, графиков и т.д., сохраняться в запоминающем устройстве, записываться на пленку, передаваться для обработки и т.д.
Нужно учитывать, что компонент 120 совмещения и/или анализатор 122 могут быть частью системы 100 (как показано) или быть удаленными от нее, например, в вычислительной системе, такой как рабочая станция или т.п. В любом случае один или несколько процессоров могут выполнять машиночитаемые команды, кодированные и/или воплощенные на локальном или удаленном машиночитаемом носителе информации, например запоминающем устройстве, чтобы реализовать компонент 120 совмещения и/или анализатор 122.
Фиг. 2 иллюстрирует пример компонента 120 совмещения.
Проиллюстрированный компонент 120 совмещения включает в себя фильтр 202, который применяется для фильтрации данных 4-мерного изображения, которые включают в себя данные изображения, полученные в разные моменты времени, или данные изображения, соответствующие разным периодам времени. Проиллюстрированный фильтр 202 конфигурируется для пространственной фильтрации данных изображения, и затем временной фильтрации данных изображения. Фиг. 3 показывает пример пространственной фильтрации данных 4-мерного изображения, соответствующих проспективному ЭКГ-синхронизированному перфузионному сканированию сердца с контрастированием, по пространственным координатам (х, у, и z), а фиг. 4 показывает пример временной фильтрации данных 4-мерного изображения по временным координатам (время). Возвращаясь к фиг. 2, такая многомерная фильтрация изображения может увеличить отношение сигнал-шум (SNR) у данных изображения наряду с сохранением пространственной и временной четкости данных изображения. Увеличение SNR (то есть уменьшение шума изображения) может привести к более точному количественному анализу перфузии миокарда. В другом варианте осуществления фильтр 202 отсутствует, или используется другой фильтр. Пример подходящего фильтра обсуждается в статье Н. Bruder et al., "Spatio-temporal filtration of dynamic CT data using diffusion filter", in Proc. of SPIE Med. Imag. Conf., vol. 7258, 2009.
Идентификатор 204 опорного изображения идентифицирует данные опорного изображения в наборе 4-мерных данных. По отношению к данным 4-мерного изображения с контрастированием идентификатор 204 опорного изображения может выполнять это путем идентификации периода времени или данных изображения, имеющих наибольшее (максимальное) контрастирование. Это может выполняться автоматически, например, из кривых максимального увеличения или иным образом. Как правило, данные изображения, соответствующие разным сканированным сердечным циклам, будут иметь разные величины контрастирования, когда контрастное вещество поглощается и вымывается, и данные изображения с наибольшим поглощением контрастного вещества соответствуют времени, когда обе камеры сердца полностью заполнены контрастным веществом и, скорее всего, покажут большую четкость на границе относительно других данных изображения. Этот период времени можно идентифицировать автоматически с помощью компонента 120 совмещения, например путем отыскания периода времени с максимальной энергией изображения. В другом примере идентификатор 204 опорного изображения идентифицирует данные опорного изображения на основе сигнала, указывающего выбранные пользователем данные изображения, и/или иным образом.
Компонент 206 деформирования деформирует или преобразует данные 4-мерного изображения на основе данных опорного изображения. В проиллюстрированном варианте осуществления компонент 206 деформирования применяет эластичный или нежесткий алгоритм. В другом варианте осуществления дополнительно или в качестве альтернативы применяется жесткий алгоритм. Компонент 206 деформирования может деформировать данные изображения один или несколько раз, например, путем деформирования ранее деформированных данных изображения. Например, когда определяется, что данные деформированного изображения и опорного изображения не достаточно похожи структурно, компонент 206 деформирования может деформировать данные деформированного изображения. Определитель 208 подобия определяет значение, указывающее подобие между данными деформированного изображения и данными опорного изображения. Оптимизатор 210 облегчает минимизацию критерия подобия.
Компонент 212 принятия решений определяет, когда достигнуто подходящее совмещение. Если оно не достигнуто, то компонент 120 совмещения деформирует данные деформированного изображения, определитель 208 подобия определяет другое значение, и компонент 212 принятия решений на основе нового значения определяет, достигнуто ли подходящее совмещение. Эти этапы могут повторяться, пока совмещение определяется как приемлемое. В одном примере компонент 212 принятия решений определяет значение разности между этим значением и значением, определенным для предыдущего деформирования данных изображения, и сравнивает значение разности с заранее установленной пороговой величиной. В другом примере компонент 212 принятия решений сравнивает значение с заранее установленным (относительным или абсолютным) пороговым значением. В еще одном примере компонент 212 принятия решений определяет, когда выполнено заранее установленное количество итераций над данными изображения. Другие критерии могут использовать дополнительно или в качестве альтернативы для определения, когда достигается подходящее совмещение.
Фиг. 5 и 6 иллюстрируют примерное совмещение с помощью компонента 120 совмещения. В этом примере компонент 120 совмещения определяет поле деформации, которое удовлетворяет Уравнению 1.
Уравнение 1
fw(x)=ft(g(x))=fr,
где fw представляет данные деформированного изображения, ft представляет данные изображения, совмещаемые с данными опорного изображения, g представляет поле деформации, a fr представляет данные опорного изображения. Компонент 120 совмещения может использовать все или подмножество значений интенсивности вокселей у совмещаемых изображений.
На фиг. 5 данные 502 изображения совмещаются с данными 504 опорного изображения. В этом примере компонент 206 деформирования включает в себя интерполятор, который деформирует данные 502 изображения, формируя деформированные данные 508 изображения. Подходящий алгоритм интерполяции включает в себя кубический би-сплайн или другой алгоритм. Компонент 208 подобия определяет значение подобия между данными 508 деформированного изображения и данными 504 опорного изображения. В проиллюстрированном варианте осуществления критерий подобия включает в себя нормированную кросс-корреляцию с нулевым средним между изображениями fr и ft. Оптимизатор 210 пытается найти наилучшую деформацию g, которая минимизирует критерий подобия. Подходящий оптимизатор включает в себя адаптивную оптимизацию методом стохастического градиентного спуска. Этот критерий хорошо подходит для обработки меняющейся концентрации контрастного вещества в данных 4-мерного изображения. Соответствие между дискретными и непрерывными версиями изображений и полем g 510 деформации может устанавливаться с использованием кубических би-сплайнов. Как отмечалось в этом документе, совмещение может включать в себя одну или несколько итераций 512. Как показано на фиг. 6, данные изображения из одного или нескольких периодов времени 600 совмещаются на основе и/или с данными 504 опорного изображения.
В проиллюстрированном варианте осуществления алгоритм адаптивной оптимизации методом стохастического градиентного спуска применяется вместе с адаптивным предсказанием величины шага. Подходящий алгоритм оптимизации с предсказанием величины шага обсуждается в S. Klein, J. P. W. Pluim, M. Staring and M.
A. Viergever, "Adaptive stochastic gradient descent optimisation for image registration", International Journal of Computer Vision, 81(3), pp. 227-239, 2009. Такой алгоритм может уменьшить время вычисления в расчете на итерацию, не влияя на скорость сходимости, окончательную точность или надежность. Этот алгоритм аналогичен детерминированному градиентному спуску с отличием в том, что градиент критерия подобия заменяется приближением. Стохастическое приближение производной критерия подобия может определяться с использованием нового, случайно выбранного подмножества вокселей в каждой итерации процесса оптимизации. Таким образом, избегают сдвига в ошибке приближения.
Скорость и точность совмещения могут зависеть от качества градиентного приближения, полученного путем случайной выборки. Подмножество случайных местоположений вокселей может определяться с использованием либо равномерной выборки, либо неравномерной выборки, что может улучшить градиентные приближения. Границы изображения могут сильно влиять на оценки совмещения на основе интенсивности. По существу, выборочное распределение, которое подчеркивает границы изображения, может использоваться для улучшения градиентных приближений. В одном примере двоичная маска используется для случайной выборки только вокселей, которые имеют наибольшие величины градиента изображения. Другой подходящий подход для случайной выборки описывается в Bhagalia R, Fessler JA, Kim В, "Accelerated nonrigid intensity-based image registration using importance sampling", IEEE Trans Med Imaging, 2009 Aug; 28 (8): 1208-16.
Подход с переменной разрешающей способностью может применяться для повышения надежности и эффективности алгоритма совмещения. С помощью такого алгоритма сначала может выполняться совмещение с использованием грубых субдискретизированных изображений и определения поля деформации с уменьшенным количеством степеней свободы. Потом результаты могут распространяться на следующий более мелкий уровень. Эта итерационная процедура может поочередно расширять сетки контрольных точек би-сплайна у изображений и у поля деформации, пока не достигнут самый мелкий уровень. Подходящий подход с переменной разрешающей способностью обсуждается в М. Unser, А. Aldroubi, and М. Eden, "The L2-polynomial spline pyramid", IEEE Trans. Pattern Anal. Mach. Intell. 15, 364-379, 1993. Этот подход использует 3-мерные операторы уменьшения/расширения би-сплайна с коэффициентом два (2) для построения пирамиды или набор постепенно уменьшенных версий исходных изображений и поля деформации, который оптимален.
В случаях, в которых существует высокая степень свободы при совмещении, в сущности, может иметь место некорректная задача, которая могла бы привести к нереальному свертыванию полей деформации при отсутствии подходящих ограничений. По существу, различные ограничения могут применяться при оценивании поля g деформации. Например, в одном примере одно ограничение может состоять в том, что поле g деформации является обратимым, когда движение органа и ткани человека является обратимым. Один подходящий подход для 3-мерных совмещений можно найти в S. Y. Chun and J. A. Fessler, "A simple regularizer for b-spline nonrigid image registration that encourages local invertibility", IEEE J. Sel. Top. Signal Process. 3, 159-169, 2009. Штрафная функция, раскрытая в работе Fessler, поощряет положительные якобианы путем ограничения отличий двух соседних коэффициентов деформации в направлении х, у, z. Путем ограничения только отличий вместо коэффициентов даже большие деформации g с градиентами в тех пределах включаются в пространство поиска решений.
Фиг. 7 иллюстрирует способ. Для этого примера компонент 120 совмещения совмещает данные 4-мерного изображения, полученные посредством проспективного ЭКГ-синхронизированного перфузионного сканирования сердца с контрастированием. Такое сканирование синхронизируется на основе заранее установленной фазы (фаз) сердца, например систолической фазы, диастолической фазы и/или другой сердечной фазы в каждом сердечном цикле или сердечном сокращении (то есть в каждом интервале R-R). Фаза (фазы) может выбираться оператором сканера, идентифицироваться по выбранному протоколу визуализации и/или определяться иным образом. Кроме того, сканирование может синхронизироваться так, что фаза (фазы) сердца сканируется в каждом цикле сердца, каждом втором цикле сердца или некотором другом количестве циклов сердца меньше каждого цикла сердца. Сканирование может инициироваться до, во время или вскоре после введения контрастного вещества.
На этапе 702 получаются данные 4-мерного перфузионного изображения. На этапе 704 к набору 4-мерных данных применяется динамическая диффузионная фильтрация, которая описана применительно к фиг. 2 или иным образом. На этапе 706 фильтрованное изображение совмещается, как описано в этом документе. Например, в одном примере это включает в себя эластичное совмещение данных изображения с использованием данных опорного изображения, используя способ оптимизации методом стохастического градиентного спуска вместе с адаптивным предсказанием величины шага в сочетании с показателем подобия, основывающимся на нормированной кросс-корреляции с нулевым средним. На этапе 708 обрабатываются результирующие совмещенные данные изображения. Это включает в себя определение различных перфузионных карт и/или параметров. Используя этот способ, артефакты вследствие геометрическое несовпадения можно устранить или уменьшить при совмещении данных изображения с контрастированием у подвижного объекта или анатомической структуры. По существу, перфузионные применения, такие как визуализация КТ перфузии миокарда, могут предоставлять данные, хорошо подходящие для относительно высокой количественной точности.
Вышеописанные действия могут быть реализованы посредством машиночитаемых команд, которые при выполнении процессором (процессорами) компьютера побуждают процессор (процессоры) выполнять описанные в этом документе действия. В таком случае команды сохраняются на машиночитаемом носителе информации, например в запоминающем устройстве, ассоциированном и/или доступном иным образом для соответствующего компьютера.
Изобретение описано со ссылкой на предпочтительные варианты осуществления. После прочтения и осмысления предшествующего подробного описания могут возникнуть его модификации и изменения. Подразумевается, что изобретение должно создается как включающее в себя все такие модификации и изменения в той мере, в которой они входят в объем прилагаемой формулы изобретения либо ее эквивалентов.
Изобретение относится к совмещению данных изображения. Техническим результатом является повышение точности определения движения подвижной структуры. Способ совмещения набора данных 4-мерного изображения с контрастированием содержит этап, на котором: совмещают данные изображения, соответствующие множеству разных периодов времени, с опорным изображением из одного из периодов времени, данные изображения совмещаются с использованием итерационного алгоритма совмещения на основе градиентов и показателя подобия, алгоритм совмещения основывается на алгоритме оптимизации методом стохастического градиентного спуска, и показатель подобия включает в себя показатель подобия, основывающийся на нормированной кросс-корреляции с нулевым средним. 2 н. и 9 з.п. ф-лы, 7 ил.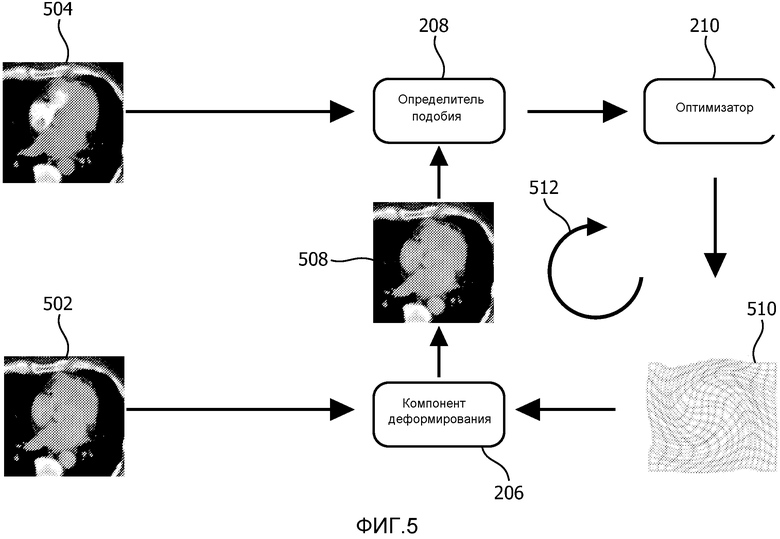
1. Способ совмещения набора данных 4-мерного изображения с контрастированием, полученного перфузионным сканированием с контрастированием посредством контрастного вещества, в котором набор данных 4-мерного изображения с контрастированием включает в себя данные изображения одного и того же исследуемого объема, полученные в разные периоды времени с изменяющимся контрастированием, при этом исследуемый объем включает в себя подвижную структуру, и разные периоды времени соответствуют заранее установленной исследуемой фазе движения в разных циклах движения подвижной структуры, причем способ содержит этап, на котором:
совмещают данные изображения, соответствующие множеству разных периодов времени, с опорным изображением из одного из периодов времени, при этом данные изображения совмещаются с использованием итерационного алгоритма совмещения на основе градиентов и показателя подобия, причем алгоритм совмещения основывается на алгоритме оптимизации методом стохастического градиентного спуска, и показатель подобия включает в себя показатель подобия, основывающийся на нормированной кросс-корреляции с нулевым средним.
2. Способ по п. 1, в котором показатель подобия нормализованной взаимной корреляции с нулевым средним обрабатывает меняющуюся концентрацию контрастного вещества в наборе данных 4-мерного изображения с контрастированием.
3. Способ по п. 1 или 2, в котором совмещение данных изображения содержит:
деформацию данных изображения для конкретного периода времени, чтобы привести в соответствие с данными опорного изображения;
определение значения, указывающего подобие между данными деформированного изображения и данными опорного изображения; и
совмещение данных изображения с данными опорного изображения, когда значение удовлетворяет заранее установленным критериям, и деформацию данных деформированного изображения, когда значение не удовлетворяет заранее установленным критериям.
4. Способ по п. 3, в котором заранее установленные критерии включают в себя пороговое значение.
5. Способ по п. 3, в котором заранее установленные критерии включают в себя максимальное количество итераций.
6. Способ по п. 1 или 2, дополнительно содержащий этап, на котором фильтруют данные 4-мерного изображения до совмещения данных 4-мерного изображения, причем фильтрация включает в себя пространственную фильтрацию набора данных 4-мерного изображения и временную фильтрацию данных 4-мерного изображения.
7. Способ по п. 1 или 2, дополнительно содержащий этап, на котором формируют по меньшей мере одно из параметрической карты и/или перфузионного параметра на основе набора совмещенных данных 4-мерного изображения.
8. Способ по п. 1 или 2, в котором набор данных 4-мерного изображения соответствует проспективному ЭКГ-синхронизированному перфузионному сканированию с контрастированием.
9. Способ по п. 1 или 2, в котором данные опорного изображения соответствуют данным изображения, имеющим заранее установленное целевое контрастирование.
10. Способ по п. 1 или 2, в котором набор данных 4-мерного изображения включает в себя данные изображения сердца и соответствует конкретной заранее установленной исследуемой сердечной фазе.
11. Машиночитаемый носитель информации, кодированный исполняемыми компьютером командами, которые при их исполнении процессором компьютера предписывают процессору:
эластично совмещать данные 4-мерного проспективного ЭКГ-синхронизированного изображения с контрастированием на основе алгоритма оптимизации методом стохастического градиентного спуска с адаптивным предсказанием величины шага в сочетании с показателем подобия, основывающимся на нормированной кросс-корреляции с нулевым средним.
| Isola et al, "Fully automatic nonrigid registration-based local motion estimation for motion-corrected iterative cardiac CT reconstruction", Medical Physics, vol | |||
| Пишущая машина | 1922 |
|
SU37A1 |
| Breeuwer M | |||
| et al, "Automatic QUantative Analysis of Cardiac MR Perfusion Images", Proceedings of Spie, The International Society for Optical Ebgineering Spie, USA, vol. | |||

