Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству управления рулением.
Уровень техники
[0002] Патентный документ 1 раскрывает технологию для увеличения силы реакции при рулении в направлении, в котором поперечная позиция транспортного средства отдаляется от сигнальной линии дорожной разметки в соразмерной близости к сигнальной линии дорожной разметки, чтобы подавлять выезд за пределы полосы движения транспортного средства и помогать в вождении водителю.
Документы предшествующего уровня техники
Патентные документы
[0003] Патентный документ 1. Выложенная заявка на патент (Япония) №2001-48034
Сущность изобретения
Проблемы, которые должны быть разрешены изобретением
[0004] Тем не менее, водитель чрезмерно доверяет помощи при вождении и зачастую снижает внимание к вождению, когда помощь при вождении, к примеру, помощь при вождении, описанная выше, продолжается в течение длительного периода времени.
Цель настоящего изобретения заключается в том, чтобы предоставлять устройство управления рулением, допускающее повышение внимания водителя к вождению при подавлении выезда за пределы полосы движения.
Средство для разрешения вышеуказанных проблем
[0005] В настоящем изобретении, когда актуатор силы реакции при рулении для приложения силы реакции при рулении к модулю руления управляется на основе величины управления силой реакции при рулении, при которой сила реакции при рулении увеличивается в направлении, в котором поперечная позиция рассматриваемого транспортного средства отдаляется от сигнальной линии дорожной разметки в соразмерной близости к сигнальной линии дорожной разметки, и когда поворотный актуатор для приложения крутящего момента поворота к поворотному узлу, механически отделенному от модуля руления, управляется на основе величины управления при повороте, при которой величина поворачивания увеличивается в направлении, в котором поперечная позиция рассматриваемого транспортного средства отдаляется от сигнальной линии дорожной разметки в соразмерной близости к сигнальной линии дорожной разметки, величина управления силой реакции при рулении для обработки подавления силы реакции для уменьшения величины управления силой реакции при рулении вычисляется, когда состояние, в котором величина управления силой реакции при рулении имеет предварительно определенное пороговое значение или выше, длится в течение предварительно определенной продолжительности, и обработка подавления силы реакции выполняется для управления актуатором силы реакции при рулении на основе величины управления силой реакции при рулении для обработки подавления силы реакции вместо величины управления силой реакции при рулении, и между тем, величина поворачивания поддерживается равной значению, возникающему в начальный момент времени обработки подавления силы реакции, когда начата обработка подавления силы реакции.
Преимущества изобретения
[0006] Следовательно, можно подавлять чрезмерное доверие помощи при вождении водителем и повышать внимание водителя к вождению при одновременном подавлении выезда за пределы полосы движения.
Краткое описание чертежей
[0007] Фиг. 1 является видом системы, показывающим систему руления транспортного средства варианта 1 осуществления.
Фиг. 2 является блок-схемой управления модуля 19 управления при повороте.
Фиг. 3 является блок-схемой управления модуля 20 управления силой реакции при рулении.
Фиг. 4 является блок-схемой управления модуля 32 вычисления задаваемого угла поворота для подавления внешних возмущений.
Фиг. 5 является блок-схемой управления модуля 37 вычисления силы реакции на основе угла относительно вертикальной оси.
Фиг. 6 является блок-схемой управления модуля 38 вычисления силы реакции на основе поперечной позиции.
Фиг. 7 является видом, иллюстрирующим область управления F/B-управления углом относительно вертикальной оси и F/B-управления поперечной позицией.
Фиг. 8 является временной диаграммой, показывающей изменение угла относительно вертикальной оси, когда транспортное средство, движущееся по прямой дороге на скоростной автомагистрали, подвергается прерывистому боковому ветру.
Фиг. 9 является временной диаграммой, показывающей изменение угла относительно вертикальной оси и изменение поперечной позиции, когда не выполняется F/B-управление поперечной позицией, когда транспортное средство подвергается постоянному боковому ветру при движении по прямой дороге на скоростной автомагистрали.
Фиг. 10 является временной диаграммой, показывающей изменение угла относительно вертикальной оси и изменение поперечной позиции, когда выполнено F/B-управление поперечной позицией, когда транспортное средство подвергается постоянному боковому ветру при движении по прямой дороге на скоростной автомагистрали.
Фиг. 11 является блок-схемой управления модуля 34 вычисления смещения поперечной силы.
Фиг. 12 является видом, показывающим состояние, в котором характеристика силы реакции при рулении, представляющая крутящий момент силы реакции при рулении, который соответствует стабилизирующему крутящему моменту, смещена в направлении, идентичном направлению стабилизирующего крутящего момента.
Фиг. 13 является характеристической схемой, показывающей взаимосвязь между углом поворота руля при рулении и крутящим моментом поворота при рулении водителя.
Фиг. 14 является видом, показывающим состояние, в котором характеристика, показывающая взаимосвязь между углом поворота руля при рулении и крутящим моментом поворота при рулении водителя, изменена вследствие смещения характеристики силы реакции при рулении в направлении, идентичном направлению стабилизирующего крутящего момента, причем характеристика силы реакции при рулении представляет крутящий момент силы реакции при рулении, который соответствует стабилизирующему крутящему моменту.
Фиг. 15 является блок-схемой управления модуля 36 вычисления смещения крутящего момента силы реакции при рулении.
Фиг. 16 является блок-схемой управления модуля 39 вычисления силы реакции на основе допустимого времени отклонения.
Фиг. 17 является блок-схемой управления модуля 40 вычисления силы реакции на основе поперечной позиции.
Фиг. 18 является видом, показывает состояние, в котором характеристика силы реакции при рулении, представляющая крутящий момент силы реакции при рулении, который соответствует стабилизирующему крутящему моменту, смещена в направлении, в котором увеличивается абсолютное значение крутящего момента силы реакции при рулении.
Фиг. 19 является характеристической схемой, показывающей взаимосвязь между углом поворота руля при рулении и крутящим моментом поворота при рулении водителя.
Фиг. 20 является видом, показывающим состояние, в котором характеристика, показывающая взаимосвязь между углом поворота руля при рулении и крутящим моментом поворота при рулении водителя, изменена вследствие смещения характеристики силы реакции при рулении в направлении, в котором увеличивается абсолютное значение крутящего момента силы реакции при рулении, причем характеристика силы реакции при рулении представляет крутящий момент силы реакции при рулении, который соответствует стабилизирующему крутящему моменту.
Фиг. 21 является временной диаграммой величины смещения крутящего момента силы реакции при рулении и силы реакции, соответствующей поперечной позиции, когда состояние, в котором величина смещения крутящего момента силы реакции при рулении имеет пороговое значение или выше, продолжается в течение предварительно определенной продолжительности.
Номера ссылок
[0008] 1 – модуль руления
2 – поворотный узел
3 – резервная муфта
4 – SBW-контроллер
5FL, 5FR – левое и правое передние колеса
6 – руль
7 – вал рулевой колонки
8 – электромотор для формирования силы реакции
9 – датчик угла поворота при рулении
11 – вал шестерни
12 – рулевая передача
13 – поворотный электромотор
14 – датчик угла поворота
15 – шестерня зубчатой рейки
16 – зубчатая рейка
17 – камера
18 – датчик скорости транспортного средства
19 – модуль управления при повороте
19a – сумматор
20 – модуль управления силой реакции при рулении
20a – модуль вычитания
20b – сумматор
20c – сумматор
21 – процессор изображений
22 – формирователь сигналов управления электрического тока
23 – формирователь сигналов управления электрического тока
24 – навигационная система
31 – модуль вычисления задаваемого угла поворота
32 – модуль вычисления задаваемого угла поворота для подавления внешних возмущений
32a – модуль вычисления угла относительно вертикальной оси
32b – модуль вычисления кривизны
32c – модуль вычисления поперечной позиции
32d – сумматор
32e – модуль вычисления целевого момента относительно вертикальной оси
32f – модуль вычисления целевого углового ускорения относительно вертикальной оси
32g – модуль вычисления целевой скорости относительно вертикальной оси
32h – модуль вычисления задаваемого угла поворота
32i – процессор задания ограничений
33 – модуль вычисления поперечной силы
34 – модуль вычисления смещения поперечной силы
34a – модуль вычисления кривизны
34b – модуль задания верхних/нижних предельных значений
34c – модуль вычисления SAT-усиления
34d – умножитель
34e – процессор задания ограничений
35 – модуль вычисления SAT
36 – модуль вычисления смещения крутящего момента силы реакции при рулении
36a – модуль вычисления угла относительно вертикальной оси
36b – модуль вычисления поперечной позиции
36c – модуль выбора силы реакции
36d – процессор задания ограничений
37 – модуль вычисления силы реакции на основе угла относительно вертикальной оси
37a – модуль задания верхних/нижних предельных значений
37b – модуль умножения F/B-усиления угла относительно вертикальной оси
37c – модуль умножения корректирующего усиления скорости транспортного средства
37d – модуль умножения корректирующего усиления кривизны
37e – умножитель
38 – модуль вычисления силы реакции на основе поперечной позиции
38a – модуль вычитания
38b – модуль задания верхних/нижних предельных значений
38c – модуль умножения корректирующего усиления расстояния
38d – модуль умножения F/B-усиления поперечной позиции
38e – модуль умножения корректирующего усиления скорости транспортного средства
38f – модуль умножения корректирующего усиления кривизны
38g – умножитель
39 – модуль вычисления силы реакции на основе допустимого времени отклонения
39a – умножитель
39b – делитель
39c – делитель
39d – модуль выбора допустимого времени отклонения
39e – модуль вычисления силы реакции на основе допустимого времени отклонения
40 – модуль вычисления силы реакции на основе поперечной позиции
40a – модуль вычитания
40b – модуль вычитания
40c – модуль выбора отклонения поперечной позиции
40d – модуль вычисления силы реакции на основе отклонения поперечной позиции
41 –модуль поддержания силы реакции
42 – процессор подавления силы реакции
Предпочтительные варианты осуществления изобретения
[0009] Первый вариант осуществления
Конфигурация системы
Фиг. 1 является системным видом, показывающим систему руления транспортного средства варианта 1 осуществления.
Устройство руления варианта 1 осуществления, главным образом, сконфигурировано из модуля 1 руления, поворотного узла 2, резервной муфты 3 и контроллера 4 руления по проводам (SBW) и устройства руления, использующего SBW-систему, в которой механически отделены модуль 1 руления для приема ввода руления водителя и поворотный узел 2 для поворота левого и правого передних колес 5FL, 5FR (поворотных колес).
[0010] Модуль 1 руления содержит руль 6, вал 7 рулевой колонки, электромотор 8 для формирования силы реакции и датчик 9 угла поворота при рулении.
Вал 7 рулевой колонки вращается неразъемно с рулем 6.
Электромотор 8 обеспечения силы реакции, например, представляет собой бесщеточный электромотор и коаксиальный электромотор, в котором выходной вал является коаксиальным с валом 7 рулевой колонки, и выводит крутящий момент силы реакции при рулении на вал 7 рулевой колонки в ответ на команду из SBW-контроллера 4.
Датчик 9 угла поворота при рулении обнаруживает абсолютный угол поворота вала 7 рулевой колонки, т.е. угол поворота руля 6 при рулении.
[0011] Поворотный узел 2 содержит вал 11 шестерни, рулевую передачу 12, поворотный электромотор 13 и датчик 14 угла поворота.
Рулевая передача 12 представляет собой рулевую передачу с механизмом реечной передачи и поворачивает передние колеса 5L, 5R в соответствии с вращением вала 11 шестерни.
Поворотный электромотор 13 представляет собой, например, бесщеточный электромотор, и выходной вал соединяется с шестерней 15 зубчатой рейки через редуктор (не показан), причем выходной вал выводит крутящий момент поворота для поворота передних колес 5 в зубчатую рейку 16 в соответствии с командой из SBW-контроллера 4.
Датчик 14 угла поворота обнаруживает абсолютный угол поворота поворотного электромотора 13. Здесь, угол поворота поворотного электромотора 13 и угол поворота передних колес 5 имеют постоянную уникально установленную корреляцию, и, следовательно, угол поворота передних колес 5 может обнаруживаться из угла поворота поворотного электромотора 13. Если не указано иное, угол поворота передних колес 5 ниже вычисляется из угла поворота поворотного электромотора 13.
Резервная муфта 3 предоставляется между валом 7 рулевой колонки модуля 1 руления и валом 11 шестерни поворотного узла 2, расцепляется, чтобы за счет этого механически отделять модуль 1 руления и поворотный узел 2, и зацепляется, чтобы за счет этого механически соединять модуль 1 руления и поворотный узел 2.
[0012] В дополнение к углам, обнаруженным посредством датчика 9 угла поворота при рулении и датчика 14 угла поворота, скорость транспортного средства (скорость кузова автомобиля), обнаруженная посредством изображений проезжаемого пути впереди рассматриваемого транспортного средства, захваченных посредством камеры 17 и посредством датчика 18 скорости транспортного средства, вводится в SBW-контроллер 4.
SBW-контроллер 4 имеет модуль 19 управления при повороте для управления углом поворота передних колес 5FL, 5FR, модуль 20 управления силой реакции при рулении для управления крутящим моментом силы реакции при рулении, приложенным к валу 7 рулевой колонки, и процессор 21 изображений.
Модуль 19 управления при повороте формирует задаваемый угол поворота на основе различной входной информации и выводит сформированный задаваемый угол поворота в формирователь 22 сигналов управления по электрическому току.
Формирователь 22 сигналов управления электрического тока управляет задаваемым электрическим током в поворотный электромотор 13 посредством обратной связи по углу для принудительного задания совпадения фактического угла поворота, обнаруженного посредством датчика угла 14 поворота, и задаваемого угла поворота.
Модуль 20 управления силой реакции при рулении формирует задаваемый крутящий момент силы реакции при рулении на основе различной входной информации и выводит сформированный крутящий момент силы реакции при рулении в формирователь 23 сигналов управления по электрическому току.
Формирователь 23 сигналов управления электрического тока управляет задаваемым электрическим током в электромотор 8 обеспечения силы реакции посредством обратной связи по крутящему моменту для принудительного задания совпадения фактического крутящего момента силы реакции при рулении, оцененного из значения электрического тока электромотора 8 обеспечения силы реакции, с задаваемым крутящим моментом силы реакции при рулении.
Процессор 21 изображений распознает сигнальную линию дорожной разметки (разделительную линию проезжаемого пути) слева и справа от полосы движения посредством извлечения краев или другой обработки изображений из изображений проезжаемого пути впереди рассматриваемого транспортного средства, захваченных посредством камеры 17.
Кроме того, SBW-контроллер 4 зацепляет резервную муфту 3, чтобы механически сцеплять модуль 1 руления и поворотный узел 2, когда SBW-система выходит из строя, и обеспечивает перемещение зубчатой рейки 16 в осевом направлении посредством руления руля 6. В это время, также можно осуществлять управление, которое соответствует системе электрического усилителя руления, для помощи в повышении силы поворота при рулении водителя с использованием вспомогательного крутящего момента поворотного электромотора 13.
Избыточная система, содержащая множество датчиков, контроллеров и электромоторов, может использоваться в SBW-системе. Кроме того, модуль 19 управления при повороте и модуль 20 управления силой реакции при рулении могут представлять собой отдельные модули.
[0013] В варианте 1 осуществления, управление устойчивостью и управление уменьшением величины корректирующего руления выполняются с целью уменьшения нагрузки по рулению и величины корректирующего руления водителем.
Управление устойчивостью реализуется посредством двух типов с обратной связью (F/B) в целях повышения устойчивости транспортного средства к внешним возмущениям (боковой ветер, неровность поверхности дороги, выбоины, градиент поверхности дороги и т.п.).
1. F/B-управление углом относительно вертикальной оси
Угол поворота скорректирован в соответствии с углом относительно вертикальной оси, который представляет собой угол, сформированный посредством сигнальной линии дорожной разметки и направления движения рассматриваемого транспортного средства, чтобы уменьшать угол относительно вертикальной оси, сформированный посредством внешнего возмущения.
2. F/B-управление поперечной позицией
Угол поворота скорректирован в соответствии с расстоянием (поперечной позиции) до сигнальной линии дорожной разметки, чтобы уменьшать изменение поперечной позиции, которая является интегрированным значением угла относительно вертикальной оси, сформированного посредством внешнего возмущения.
[0014] Управление уменьшением величины корректирующего руления позволяет выполнять три вида управления смещением силы реакции в целях повышения устойчивости транспортного средства относительно ввода руления водителя.
1. Управление смещением силы реакции, соответствующим поперечной позиции
Характеристика силы реакции при рулении, соответствующей стабилизирующему крутящему моменту, смещается в соответствии с поперечной позицией в направлении, в котором увеличивается абсолютное значение силы реакции при рулении, и изменение на противоположный знака крутящего момента поворота при рулении подавляется, когда водитель выполняет корректирующее руление, которое переходит нейтральную позицию угла поворота при рулении.
2. Управление смещением силы реакции, соответствующее допустимому времени отклонения
Характеристика силы реакции при рулении, соответствующей стабилизирующему крутящему моменту, смещается в соответствии с допустимым временем отклонения (временем достижения сигнальной линии дорожной разметки) в направлении, в котором увеличивается абсолютное значение силы реакции при рулении, и изменение на противоположный знака крутящего момента поворота при рулении подавляется, когда водитель выполняет корректирующее руление, которое переходит нейтральную позицию угла поворота при рулении.
3. Управление смещением силы реакции, соответствующим кривизне
Характеристика силы реакции при рулении, соответствующей стабилизирующему крутящему моменту, смещается в соответствии с кривизной сигнальной линии дорожной разметки в направлении знака, идентичном направлению знака стабилизирующего крутящего момента, причем характеристика силы реакции при рулении уменьшает усилие для поворота при рулении водителя во время движения на повороте и подавляет изменение поддерживаемого угла поворота при рулении относительно изменения усилия для поворота при рулении.
[0015] Модуль управления при повороте
Фиг. 2 является блок-схемой управления модуля 19 управления при повороте.
Модуль 31 вычисления задаваемого SBW-угла поворота вычисляет задаваемый SBW-угол поворота на основе угла поворота при рулении и скорости транспортного средства.
Модуль 32 вычисления задаваемого угла поворота для подавления внешних возмущений вычисляет задаваемый угол поворота для подавления внешних возмущений для коррекции задаваемого SBW-угла поворота при управлении устойчивостью на основе скорости транспортного средства и данных сигнальной линии дорожной разметки. Ниже описываются конкретные подробности модуля 32 вычисления задаваемого угла поворота для подавления внешних возмущений.
Сумматор 19a выводит значение, полученное посредством суммирования задаваемого SBW-угла поворота и задаваемого угла поворота для подавления внешних возмущений, в формирователь 22 сигналов управления электрического тока в качестве конечного задаваемого угла поворота.
[0016] Модуль управления силой реакции при рулении
Фиг. 3 является блок-схемой управления модуля 20 управления силой реакции при рулении.
Модуль 33 вычисления поперечной силы вычисляет поперечную силу на шинах на основе угла поворота при рулении и скорости транспортного средства в отношении карты преобразования угла в поперечную силу руления, которая представляет взаимосвязь между углом поворота при рулении и поперечной силой на шинах на каждой скорости транспортного средства в традиционном устройстве руления, полученную посредством экспериментирования и т.п. заранее. Карта преобразования угла в поперечную силу руления имеет такие характеристики, что поперечная сила на шинах больше по мере того, как больше угол поворота при рулении, величина изменения поперечной силы на шинах относительно величины изменения угла поворота при рулении больше, когда угол поворота при рулении меньше, по сравнению со случаем, когда угол поворота при рулении больше, и поперечная сила на шинах уменьшается по мере того, как скорость транспортного средства увеличивается.
Модуль 34 вычисления смещения поперечной силы вычисляет, на основе скорости транспортного средства и данных сигнальной линии дорожной разметки, величину смещения поперечной силы для смещения характеристик силы реакции при рулении при управлении смещением силы реакции, которое соответствует кривизне. Ниже описываются конкретные подробности модуля 34 вычисления смещения поперечной силы.
Модуль 20a вычитания вычитает величину смещения поперечной силы из поперечной силы на шинах.
Модуль 35 вычисления SAT вычисляет крутящий момент силы реакции при рулении, сформированный посредством поперечной силы на шинах на основе скорости транспортного средства и поперечной силы на шинах, которая смещена на величину смещения поперечной силы, в отношении карты преобразования поперечной силы в крутящий момент силы реакции при рулении, которая представляет взаимосвязь между поперечной силой на шинах и крутящим моментом силы реакции при рулении в традиционном устройстве руления, полученную посредством экспериментирования и т.п. заранее. Карта преобразования поперечной силы на шинах в крутящий момент силы реакции при рулении имеет такие характеристики, что крутящий момент силы реакции при рулении больше по мере того, как больше поперечная сила на шинах, величина изменения крутящего момента силы реакции при рулении относительно величины изменения поперечной силы на шинах больше, когда поперечная сила на шинах меньше, по сравнению со случаем, когда поперечная сила на шинах больше, и крутящий момент силы реакции при рулении уменьшается по мере того, как скорость транспортного средства увеличивается. Эти характеристики моделируют силу реакции, сформированную на руле посредством стабилизирующего крутящего момента, при котором колеса пытаются возвращаться в прямолинейное состояние, вызываемое посредством силы реакции поверхности дороги, в традиционном устройстве руления.
Модуль 33 вычисления поперечной силы и модуль 35 вычисления SAT соответствуют средству оценки состояния поворачивания для оценки стабилизирующего крутящего момента (состояния поворачивания поворотного узла) на основе угла поворота руля 6 при рулении.
[0017] Сумматор 20b суммирует компонент крутящего момента силы реакции при рулении (пружинный элемент, элемент вязкости, элемент количества движения), соответствующий характеристикам руления, и крутящий момент силы реакции при рулении. Пружинный элемент представляет собой компонент, пропорциональный углу поворота при рулении, и вычисляется посредством умножения угла поворота при рулении на предварительно определенное усиление. Элемент вязкости представляет собой компонент, пропорциональный угловой скорости руления, и вычисляется посредством умножения угловой скорости руления на предварительно определенное усиление. Элемент количества движения представляет собой компонент, пропорциональный угловому ускорению руления, и вычисляется посредством умножения углового ускорения руления на предварительно определенное усиление.
Модуль 36 вычисления смещения крутящего момента силы реакции при рулении вычисляет величину смещения крутящего момента силы реакции при рулении для смещения характеристики силы реакции при рулении при управлении смещением силы реакции, соответствующем поперечной позиции или допустимому времени отклонения, на основе скорости транспортного средства и изображения проезжаемого пути впереди рассматриваемого транспортного средства. Ниже описываются конкретные подробности модуля 36 вычисления смещения крутящего момента силы реакции при рулении.
Сумматор 20c выводит значение в качестве конечного задаваемого крутящего момента силы реакции при рулении в формирователь 23 сигналов управления электрического тока, причем значение получается посредством суммирования величины смещения крутящего момента поворота при рулении и крутящего момента силы реакции при рулении, с которым суммирован компонент крутящего момента силы реакции при рулении, соответствующей характеристике руления.
[0018] Модуль вычисления задаваемого угла поворота для подавления внешних возмущений
Фиг. 4 является блок-схемой управления модуля 32 вычисления задаваемого угла поворота для подавления внешних возмущений.
Модуль 32a вычисления угла относительно вертикальной оси вычисляет угол относительно вертикальной оси, который представляет собой угол, сформированный посредством сигнальной линии дорожной разметки и направления движения рассматриваемого транспортного средства, в расположенной впереди точке фиксации. Угол относительно вертикальной оси в расположенной впереди точке фиксации представляет собой угол, сформированный посредством сигнальной линии дорожной разметки и направления движения рассматриваемого транспортного средства, после предварительно определенной продолжительности (например, 0,5 секунды). Вычисление угла относительно вертикальной оси на основе изображения проезжаемого пути, захваченного посредством камеры 17, дает возможность простого обнаружения угла относительно вертикальной оси с высокой точностью.
Модуль 32b вычисления кривизны вычисляет кривизну сигнальной линии дорожной разметки в расположенной впереди точке фиксации.
Модуль 32c вычисления поперечной позиции вычисляет расстояние до сигнальной линии дорожной разметки в расположенной впереди точке фиксации.
Модуль 37 вычисления силы реакции на основе угла относительно вертикальной оси вычисляет силу реакции транспортного средства для уменьшения угла относительно вертикальной оси, сформированного посредством внешнего возмущения при F/B-управлении углом относительно вертикальной оси, на основе угла относительно вертикальной оси, кривизны и скорости транспортного средства. Ниже описываются конкретные подробности модуля 37 вычисления силы реакции на основе угла относительно вертикальной оси.
Модуль 38 вычисления силы реакции на основе поперечной позиции вычисляет силу реакции транспортного средства для уменьшения изменения поперечной позиции, сформированного посредством внешнего возмущения при F/B-управлении поперечной позицией, на основе угла относительно вертикальной оси, кривизны, скорости транспортного средства и расстояния до сигнальной линии дорожной разметки в расположенной впереди точке фиксации. Ниже описываются конкретные подробности модуля 38 вычисления силы реакции на основе поперечной позиции.
[0019] Модуль 41 поддержания силы реакции на основе поперечной позиции непосредственно выводит силу реакции на основе поперечной позиции (вычисленное значение), вычисленное посредством модуля 38 вычисления силы реакции на основе поперечной позиции, когда флаг обработки подавления силы реакции находится в состоянии сброса (=0), и в случае если флаг обработки подавления силы реакции задан (=1), поддерживает вычисленное значение с момента, когда флаг обработки подавления силы реакции сброшен, до тех пор пока флаг обработки подавления силы реакции не будет сброшен. В этом случае, вычисленное значение выводится, когда вычисленное значение меньше поддерживаемого значения. Другими словами, сила реакции на основе поперечной позиции определяется посредством выбора более низкого из вычисленного значения и поддерживаемого значения. Когда флаг обработки подавления силы реакции переключен из заданного состояния в состояние сброса, поддерживаемое значение восстанавливается с постоянным наклоном до вычисленного значения. После того, как поддерживаемое значение восстановлено до вычисленного значения, флаг обработки подавления силы реакции находится в состоянии сброса, и вычисленное значение, следовательно, непосредственно выводится. Ниже описывается флаг обработки подавления силы реакции.
Сумматор 32d суммирует силу реакции, соответствующую углу относительно вертикальной оси, и силу реакции, соответствующую поперечной позиции, чтобы вычислять силу реакции в поперечном направлении.
Модуль 32e вычисления целевого момента относительно вертикальной оси вычисляет целевой момент относительно вертикальной оси на основе силы реакции в поперечном направлении, колесной базы (расстояния между осями) и нагрузки на ось задних колес и нагрузки на ось передних колес. В частности, значение, полученное посредством умножения колесной базы и отношения нагрузки на ось задних колес относительно веса транспортного средства (нагрузки на ось передних колес+нагрузки на ось задних колес), используется в качестве целевого момента относительно вертикальной оси относительно силы реакции в поперечном направлении.
Модуль 32f вычисления целевого углового ускорения относительно вертикальной оси умножает целевой момент относительно вертикальной оси и момент относительно вертикальной оси коэффициента инерции, чтобы вычислять целевое угловое ускорение относительно вертикальной оси.
Модуль 32g вычисления целевой скорости относительно вертикальной оси умножает время проезжания расстояния между движущимися в потоке транспортными средствами и целевое угловое ускорение относительно вертикальной оси, чтобы вычислять целевую скорость относительно вертикальной оси.
[0020] Модуль 32h вычисления задаваемого угла поворота вычисляет задаваемый угол δst* поворота для подавления внешних возмущений в отношении следующей формулы на основе целевой скорости φ* относительно вертикальной оси, колесной базы WHEEL_BASE, скорости V транспортного средства и характеристической скорости vCh транспортного средства. При использовании в данном документе, характеристическая скорость vCh транспортного средства является параметром в известной "формуле Аккермана" и представляет характеристику автоматического руления транспортного средства.
δst*=(φ* x WHEEL_BASE x (1+(V/vCh)2) x 180)/(В x M_PI),
где M_PI является предварительно определенным коэффициентом.
Процессор 32i задания ограничений задает верхний предел скорости изменения и максимального значения задаваемого угла δst* поворота для подавления внешних возмущений. Максимальное значение представляет собой диапазон углов поворота (например, 0,2° влево и вправо) передних колес 5FL, 5FR, соответствующих диапазону люфта, когда угол поворота руля 6 при рулении находится в диапазоне углов (например, 3° влево и вправо) люфта около нейтральной позиции в традиционном устройстве руления (в котором модуль руления и поворотный узел механически соединены).
[0021] Фиг. 5 является блок-схемой управления модуля 37 вычисления силы реакции на основе угла относительно вертикальной оси.
Модуль 37a задания верхних/нижних предельных значений задает верхние и нижние пределы угла относительно вертикальной оси. Модуль задания верхних/нижних предельных значений задает предварительно определенное значение или выше, которое допускает подавление внешнего возмущения, и значение, которое меньше значения, при котором транспортное средство становится вибрирующим, и значения, сформированного посредством руления водителем (например, 1°), когда угол относительно вертикальной оси является положительным значением (положительный угол относительно вертикальной оси возникает, когда сигнальная линия дорожной разметки и проведенная линия в направлении движения рассматриваемого транспортного средства пересекаются). Модуль задания верхних/нижних предельных значений задает значение равным 0, когда угол относительно вертикальной оси является отрицательным.
Модуль 37b умножения F/B-усиления угла относительно вертикальной оси умножает ограниченный угол относительно вертикальной оси на F/B-усиление угла относительно вертикальной оси. F/B-усиление угла относительно вертикальной оси является предварительно определенным значением или выше, которое допускает обеспечение отклика при недопущении недостаточной величины управления, и меньше значения, при котором транспортное средство становится вибрирующим, и значения, при котором водитель считывает смещение относительно нейтральной позиции между углом поворота при рулении и углом поворота.
[0022] Модуль 37c умножения корректирующего усиления скорости транспортного средства умножает скорость транспортного средства на корректирующее усиление скорости транспортного средства. Корректирующее усиление скорости транспортного средства является характерным в отношении того, что оно имеет максимальное значение в диапазоне 0-70 км/ч, постепенно уменьшается в диапазоне 70-130 км/ч и имеет минимальное значение (0) в диапазоне 130 км/ч и выше.
Модуль 37d умножения корректирующего усиления кривизны умножает кривизну на корректирующее усиление кривизны. Корректирующее усиление кривизны является характерным в отношении того, что оно меньше по мере того, как возрастает кривизна, и задает верхний предел и нижний предел (0).
Умножитель 37e умножает выводы модуля 37b умножения F/B-усиления угла относительно вертикальной оси и каждого из модуля 37c умножения корректирующего усиления скорости транспортного средства и модуля 37d умножения корректирующего усиления кривизны, чтобы определять силу реакции, соответствующую углу относительно вертикальной оси.
[0023] Фиг. 6 является блок-схемой управления модуля 38 вычисления силы реакции на основе поперечной позиции.
Модуль 38a вычитания вычитает расстояние до сигнальной линии дорожной разметки в расположенной впереди точке фиксации из порогового значения поперечной позиции (например, 90 см), заданного заранее для того, чтобы определять отклонение поперечной позиции.
Модуль 38b задания верхних/нижних предельных значений задает верхние и нижние пределы отклонения поперечной позиции. Модуль задания верхних/нижних предельных значений задает предварительно определенное положительное значение, когда отклонение поперечной позиции является положительным значением. Модуль задания верхних/нижних предельных значений задает значение равным 0, когда отклонение поперечной позиции является отрицательным.
Модуль 38c умножения корректирующего усиления расстояния умножает расстояние до сигнальной линии дорожной разметки в расположенной впереди точке фиксации на корректирующее усиление расстояния. Корректирующее усиление расстояния устанавливает нижний предел, причем корректирующее усиление расстояния является характерным в отношении того, что оно имеет максимальное значение, когда расстояние до сигнальной линии дорожной разметки имеет предварительно определенное значение или меньше, и в отношении того, что оно является меньшим значением по мере того, как увеличивается расстояние, когда превышено предварительно определенное значение.
[0024] Модуль 38d умножения F/B-усиления поперечной позиции умножает расстояние до сигнальной линии дорожной разметки, скорректированное посредством модуля 38c умножения корректирующего усиления расстояния, на F/B-усиление поперечной позиции. F/B-усиление поперечной позиции является предварительно определенным значением или выше, которое допускает обеспечение отклика при недопущении недостаточной величины управления, и меньше значения, при котором транспортное средство становится вибрирующим, и значения, при котором водитель считывает смещение относительно нейтральной позиции, и помимо этого, задается равным меньшему значению по сравнению с F/B-усилением угла относительно вертикальной оси модуля 37b умножения F/B-усиления угла относительно вертикальной оси.
Модуль 38e умножения корректирующего усиления скорости транспортного средства умножает скорость транспортного средства на корректирующее усиление скорости транспортного средства. Корректирующее усиление скорости транспортного средства является характерным в отношении того, что оно имеет максимальное значение в диапазоне 0-70 км/ч, постепенно уменьшается в диапазоне 70-130 км/ч и имеет минимальное значение (0) в диапазоне 130 км/ч и выше.
Модуль 38f умножения корректирующего усиления кривизны умножает кривизну на корректирующее усиление кривизны. Корректирующее усиление кривизны является характерным в отношении того, что оно меньше по мере того, как возрастает кривизна, и задает верхний предел и нижний предел (0).
Умножитель 38g умножает выводы из модуля 38d умножения F/B-усиления поперечной позиции и каждого из модуля 38e умножения корректирующего усиления скорости транспортного средства и модуля 38f умножения корректирующего усиления кривизны, чтобы определять силу реакции, соответствующую поперечной позиции.
[0025] Преимущество управления устойчивостью
В варианте 1 осуществления, F/B-управление углом относительно вертикальной оси для уменьшения угла относительно вертикальной оси, сформированного посредством внешнего возмущения, и F/B-управление поперечной позицией для уменьшения изменения поперечной позиции, которая является интегрированным значением угла относительно вертикальной оси, сформированного посредством внешнего возмущения, выполняются в качестве управления устойчивостью. F/B-управление углом относительно вертикальной оси выполняется независимо от поперечной позиции, когда сформирован угол относительно вертикальной оси, и F/B-управление поперечной позицией выполняется, когда расстояние до сигнальной линии дорожной разметки имеет предварительно определенное пороговое значение поперечной позиции (90 см) или меньше. Другими словами, окрестность центра полосы движения является мертвой зоной F/B-управления поперечной позицией. Область управления обоих видов F/B-управления показана на фиг. 7; φ представляет собой угол относительно вертикальной оси.
[0026] Фиг. 8 является временной диаграммой, показывающей изменение угла относительно вертикальной оси, когда транспортное средство, движущееся по прямой дороге на скоростной автомагистрали, подвергается прерывистому боковому ветру, и транспортное средство предположительно движется в окрестности центра полосы движения. Когда транспортное средство подвергается прерывистому боковому ветру, и угол относительно вертикальной оси формируется при F/B-управлении углом относительно вертикальной оси, вычисляется сила реакции, соответствующая углу относительно вертикальной оси, определяется задаваемый угол поворота для подавления внешних возмущений для получения силы реакции, и корректируется задаваемый SBW-угол поворота на основе угла поворота при рулении и скорости транспортного средства.
Когда транспортное средство движется вдоль полосы движения, в частности, по прямой дороге, угол относительно вертикальной оси является нулевым, поскольку направление сигнальной линии дорожной разметки и направление движения рассматриваемого транспортного средства совпадают. Другими словами, при F/B-управлении углом относительно вертикальной оси варианта 1 осуществления считается, что сформированный угол относительно вертикальной оси обусловлен посредством внешнего возмущения, и уменьшение угла относительно вертикальной оси позволяет обеспечивать повышение устойчивости транспортного средства относительно внешнего возмущения во время движения по прямой, в частности, и дает возможность уменьшения величины корректирующего руления водителя.
[0027] Традиционно, устройство для приложения крутящего момента поворота к системе руления, чтобы подавлять внешнее возмущение, известно в традиционном устройстве руления в качестве устройства для подавления влияния бокового ветра или другого внешнего возмущения на поведение транспортного средства. В SBW-системе, известно устройство для приложения к рулю компонента силы реакции при повороте для форсирования поворота, с тем чтобы подавлять внешнее возмущение. Тем не менее, в этих традиционных устройствах поворота, неприятное ощущение испытывается водителем, поскольку возникает флуктуация силы реакции при рулении.
В отличие от этого, с учетом того факта, что руль 6 и передние колеса 5L, 5R могут управляться независимо друг от друга, что является характеристикой SBW-системы, в которой руль 6 и передние колеса 5L, 5R механически отделены, при управлении устойчивостью, которое включает в себя F/B-управление углом относительно вертикальной оси варианта 1 осуществления, угол поворота передних колес 5L, 5R управляется на основе задаваемого угла поворота, полученного посредством суммирования задаваемого SBW-угла поворота, который соответствует углу поворота при рулении и скорости транспортного средства, и задаваемого угла поворота для подавления внешних возмущений, который соответствует углу относительно вертикальной оси, и между тем, поперечная сила на шинах оценивается на основе угла поворота при рулении и скорости транспортного средства, и сила реакции при рулении управляется на основе задаваемой силы реакции при рулении, которая соответствует скорости транспортного средства и оцененной поперечной силе на шинах.
Другими словами, не требуется, чтобы компонент силы реакции при рулении для форсирования поворота для подавления внешнего возмущения прикладывался для того, чтобы задавать угол поворота узла для подавления внешних возмущений непосредственно для передних колес 5L, 5R. Кроме того, приложение силы реакции при рулении, которая соответствует поперечной силе на шинах, оцененной из угла поворота, дает возможность уменьшения неприятного ощущения, испытываемого водителем, поскольку флуктуация поперечной силы на шинах, вызываемая посредством поворота для подавления внешнего возмущения, не отражается в силе реакции при рулении. В традиционной SBW-системе, поперечная сила на шинах оценивается из угла поворота и/или силы на валу зубчатой рейки, обнаруженной посредством датчика, и прикладывается сила реакции при рулении, соответствующая оцененной поперечной силе на шинах. Соответственно, флуктуация поперечной силы на шинах, вызываемая посредством поворота для подавления внешнего возмущения, не всегда отражается в силе реакции при рулении, и водитель испытывает неприятное ощущение. В варианте 1 осуществления, только поперечная сила на шинах, вызываемая посредством поворота для подавления внешнего возмущения, отражается в силе реакции при рулении, и может уменьшаться неприятное ощущение, вызываемое у водителя, поскольку сила реакции при рулении не колеблется вследствие поворота для подавления внешнего возмущения.
[0028] Здесь, когда угол поворота узла для подавления внешних возмущений задан непосредственно для передних колес 5L, 5R, смещение относительно нейтральной позиции между углом поворота при рулении и углом поворота становится проблемой, и в варианте 1 осуществления, задаваемый угол поворота для подавления внешних возмущений задается равным диапазону углов поворота (например, 0,2° влево и вправо) передних колес 5FL, 5FR, соответствующих диапазону люфта, когда руль 6 находится в диапазоне углов (например, 3° влево и вправо) люфта около нейтральной позиции угла поворота при рулении в традиционном устройстве руления. Возникновение угла относительно вертикальной оси, вызываемого посредством внешнего возмущения, является более значительным во время прямолинейного движения, чем во время движения на повороте, и во время прямолинейного движения, угол поворота при рулении находится около нейтральной позиции угла поворота при рулении. Другими словами, коррекция угла поворота посредством F/B-управления углом относительно вертикальной оси главным образом выполняется около нейтральной позиции угла поворота при рулении, и подавление величины смещения относительно нейтральной позиции между углом поворота при рулении и углом поворота, которая сопровождает приложение задаваемого угла поворота для подавления внешних возмущений к диапазону люфта рулевого механизма, позволяет подавлять неприятное ощущение, которое сопровождает смещение относительно нейтральной позиции.
Поскольку задаваемый угол поворота для подавления внешних возмущений ограничен 0,2° влево и вправо, можно изменять направление движения рассматриваемого транспортного средства на требуемое направление с использованием руления, введенного водителем, даже когда выполняется управление устойчивостью. Другими словами, поскольку величина коррекции угла поворота посредством задаваемого угла поворота для подавления внешних возмущений является низкой относительно величины изменения угла поворота, вызываемой посредством ввода руления водителя, можно повышать устойчивость транспортного средства относительно внешнего возмущения без помех для руления водителем.
[0029] Традиционно известные способы управления движением транспортного средства в поперечном направлении представляют собой управление недопущением отклонения от полосы движения для приложения момента относительно вертикальной оси к транспортному средству, чтобы не допускать отклонения, когда обнаруживается, что транспортное средство имеет тенденцию отклоняться от полосы движения, и управление удержанием на полосе движения для приложения момента относительно вертикальной оси к транспортному средству таким образом, что транспортное средство должно двигаться в окрестности центра полосы движения. Тем не менее, управление недопущением отклонения от полосы движения заключает в себе пороговое значение для прерывания управления, и поскольку управление не работает в окрестности центра полосы движения, не может обеспечиваться устойчивость транспортного средства относительно внешнего возмущения. Кроме того, поскольку прерывание управления выполняется вследствие порогового значения, даже когда водитель хочет перемещать транспортное средство к краю полосы движения, водитель может чувствовать раздражение. С другой стороны, управление удержанием на полосе движения заключает в себе целевую позицию (целевую линию) и хотя может обеспечиваться устойчивость транспортного средства относительно внешнего возмущения, невозможно двигаться по линии, которая отклоняется от целевой линии. Кроме того, управление прекращается, когда оценивается то, что руль отпущен, когда водитель уменьшает силу сцепления на руле. Следовательно, водитель должен захватывать руль с фиксированной силой или более, и нагрузка по рулению на водителя является высокой.
Напротив, F/B-управление углом относительно вертикальной оси варианта 1 осуществления не заключает в себе пороговое значение для прерывания управления, и, следовательно, можно постоянно обеспечивать устойчивость за счет прозрачного управления относительно внешнего возмущения. Кроме того, F/B-управление углом относительно вертикальной оси не заключает в себе целевую позицию, и, следовательно, водитель может заставлять транспортное средство двигаться по требуемой линии. Кроме того, управление не прекращается, даже когда руль 6 слегка удерживается, и, следовательно, может уменьшаться нагрузка по рулению на водителя.
[0030] Фиг. 9 является временной диаграммой, показывающей изменение угла относительно вертикальной оси и изменение поперечной позиции, когда не выполняется F/B-управление поперечной позицией, когда транспортное средство подвергается постоянному боковому ветру при движении по прямой дороге на скоростной автомагистрали, и транспортное средство предположительно движется в окрестности центра полосы движения. Когда транспортное средство подвергается постоянному боковому ветру, и угол относительно вертикальной оси формируется, угол относительно вертикальной оси уменьшается посредством F/B-управления углом относительно вертикальной оси, но транспортное средство подвергается непрерывному внешнему возмущению и дрейфует поперечно. Это обусловлено тем фактом, что F/B-управление углом относительно вертикальной оси уменьшает угол относительно вертикальной оси и не корректирует угол поворота, когда угол относительно вертикальной оси является нулевым, и, следовательно, изменение поперечной позиции, которая является интегрированным значением углов относительно вертикальной оси, сформированных посредством внешнего возмущения, не может быть непосредственно уменьшено. Задание силы реакции, соответствующей углу относительно вертикальной оси, равной высокому значению, позволяет косвенно подавлять изменения поперечной позиции (подавлять увеличение интегрированного значения углов относительно вертикальной оси), но поскольку максимальное значение задаваемого угла поворота для подавления внешних возмущений ограничено 0,2° влево и вправо, так что неприятное ощущение испытывается водителем, затруднительно эффективно подавлять поперечный дрейф транспортного средства с использованием только F/B-управления углом относительно вертикальной оси. F/B-усиление угла относительно вертикальной оси для определения силы реакции, соответствующей углу относительно вертикальной оси, помимо прочего, должно приводить к тому, что углы относительно вертикальной оси сходятся до того, как водитель воспринимает изменение угла относительно вертикальной оси, и поскольку транспортное средство становится вибрирующим без этой сходимости, даже если значение задается максимально возможно высоким, угол относительно вертикальной оси, умноженный на F/B-усиление угла относительно вертикальной оси, ограничен верхним пределом (1°) или меньше посредством модуля 37a задания верхних/нижних предельных значений. Другими словами, сила реакции, соответствующая углу относительно вертикальной оси, представляет собой силу реакции, которая соответствует меньшему углу относительно вертикальной оси, чем фактический угол относительно вертикальной оси, и из этого аспекта также очевидно, что затруднительно эффективно подавлять поперечный дрейф транспортного средства с использованием только F/B-управления углом относительно вертикальной оси.
[0031] С учетом вышеизложенного, управление устойчивостью варианта 1 осуществления вводит F/B-управление поперечной позицией, чтобы подавлять поперечный дрейф транспортного средства вследствие установившихся внешних возмущений. Фиг. 10 является временной диаграммой, показывающей изменение угла относительно вертикальной оси и изменение поперечной позиции, когда выполнено F/B-управление поперечной позицией, когда транспортное средство подвергается постоянному боковому ветру при движении по прямой дороге на скоростной автомагистрали. Когда транспортное средство, движущееся в окрестности центра полосы движения, подвергается постоянному боковому ветру и дрейфует поперечно, и расстояние до сигнальной линии дорожной разметки достигает порогового значения поперечной позиции или меньше при F/B-управлении поперечной позицией, вычисляется сила реакции, соответствующая изменению поперечной позиции (которое приблизительно равен интегрированному значению угла относительно вертикальной оси). Модуль 32 вычисления задаваемого угла поворота для подавления внешних возмущений вычисляет задаваемый угол поворота для подавления внешних возмущений, который основан на силе реакции в поперечном направлении, полученной посредством суммирования силы реакции, которая соответствует поперечной позиции, и силы реакции, которая соответствует углу относительно вертикальной оси, и корректирует задаваемый SBW-угол поворота. Другими словами, F/B-управление поперечной позицией корректирует задаваемый SBW-угол поворота с использованием задаваемого угла поворота для подавления внешних возмущений, который соответствует поперечной позиции, и, следовательно, можно непосредственно уменьшать изменение поперечной позиции, вызываемое посредством установившихся внешних возмущений, и может подавляться поперечный дрейф транспортного средства. Другими словами, позиция движения транспортного средства, в которой выполняется F/B-управление углом относительно вертикальной оси, может возвращаться в окрестность центра полосы движения, которая является мертвой зоной F/B-управления поперечной позицией.
[0032] Как описано выше, управление устойчивостью варианта 1 осуществления уменьшает изменение угла относительно вертикальной оси, вызываемое посредством неустановившихся внешних возмущений с использованием F/B-управления углом относительно вертикальной оси, и уменьшает интегрированное значение угла относительно вертикальной оси (изменение поперечной позиции), вызываемое посредством установившихся внешних возмущений с использованием F/B-управления поперечной позицией, в силу этого позволяя повышать устойчивость транспортного средства относительно как неустановившихся, так и установившихся внешних возмущений.
Кроме того, управление устойчивостью варианта 1 осуществления ограничивает поведение транспортного средства, сформированное посредством управления (приложенного посредством задаваемого угла поворота для подавления внешних возмущений) на уровне, не воспринимаемом водителем, и на уровне, который не создает помехи для изменений поведения транспортного средства, сформированных посредством руления водителя, и поскольку изменение стабилизирующего крутящего момента, сформированное посредством управления, не отражается в силе реакции при рулении, управление устойчивостью может выполняться без знания водителем того, что выполняется управление устойчивостью. За счет этого можно моделировать поведение в транспортном средстве, имеющем технические требования кузова транспортного средства, которые обеспечивают превосходную устойчивость относительно внешних возмущений.
F/B-усиление поперечной позиции для определения силы реакции, которая соответствует поперечной позиции при F/B-управлении поперечной позицией, задается равным меньшему значению, чем F/B-усиление угла относительно вертикальной оси. Как описано выше, это обусловлено тем фактом, что поскольку F/B-управление углом относительно вертикальной оси должно приводить к тому, что углы относительно вертикальной оси сходятся до того, как водитель воспринимает изменение угла относительно вертикальной оси, вызываемое посредством неустановившихся внешних возмущений, имеется потребность в высоком отклике, и наоборот, F/B-управление поперечной позицией должно прекращать увеличение изменения поперечной позиции, требуется время для изменения поперечной позиции вследствие накопления интегрированных значений угла относительно вертикальной оси, и отклик на уровне F/B-управления углом относительно вертикальной оси, следовательно, не требуется. Кроме того, даже если /B-усиление поперечной позиции задается высоким, величина управления значительно колеблется в соответствии с абсолютной величиной внешнего возмущения, и водитель должен испытывать неприятное ощущение.
[0033] Модуль вычисления смещения поперечной силы
Фиг. 11 является блок-схемой управления модуля 34 вычисления смещения поперечной силы.
Модуль 34a вычисления кривизны вычисляет кривизну сигнальной линии дорожной разметки в расположенной впереди точке фиксации.
Модуль 34b задания верхних/нижних предельных значений задает верхние и нижние пределы скорости транспортного средства.
Модуль 34c вычисления SAT-усиления вычисляет SAT-усиление, которое соответствует скорости транспортного средства, на основе ограниченной скорости транспортного средства. SAT-усиление задает верхний предел, причем SAT-усиление является характерным в том, что усиление становится больше по мере того, как становится выше скорость транспортного средства.
Умножитель 34d умножает кривизну на SAT-усиление, чтобы определять величину смещения поперечной силы.
Процессор 34e задания ограничений ограничивает максимальное значение величины смещения поперечной силы и верхний предел скорости изменения. Например, максимальное значение составляет 1000 Н, а верхний предел скорости изменения составляет 600 Н/с.
[0034] Преимущество управления смещением силы реакции, соответствующего кривизне
Управление смещением силы реакции, соответствующее кривизне, определяет величину смещения поперечной силы, которая больше по мере того, как больше кривизна сигнальной линии дорожной разметки, и вычитает величину смещения поперечной силы из поперечной силы на шинах. Крутящий момент силы реакции при рулении, который соответствует поперечной силе на шинах, вычисленной посредством модуля 35 вычисления SAT, т.е. характеристика силы реакции при рулении, представляющая крутящий момент силы реакции при рулении, который соответствует стабилизирующему крутящему моменту, смещается в направлении знака, идентичном направлению знака стабилизирующего крутящего момента соразмерно большей кривизне сигнальной линии дорожной разметки, как показано на фиг. 12. Фиг. 12 показывает случай правой кривой, и когда кривая представляет собой левую кривую, смещение возникает в направлении, противоположном относительно направления на фиг. 12.
[0035] Традиционно, в SBW-системе, в которой механически отделены угол поворота при рулении и угол поворота, задается характеристика силы реакции угла поворота при рулении для моделирования силы реакции при рулении, которая соответствует стабилизирующему крутящему моменту в традиционном устройстве руления, и сила реакции при рулении прикладывается к рулю на основе характеристики силы реакции при рулении. В этом случае, взаимосвязь между углом поворота руля при рулении и крутящим моментом поворота при рулении водителя показана как характеристика A на фиг. 13. Другими словами, абсолютное значение крутящего момента поворота при рулении увеличивается по мере того, как возрастает абсолютное значение угла поворота при рулении, и величина изменения крутящего момента поворота при рулении относительно величины изменения угла поворота при рулении увеличивается более значительно, когда абсолютное значение угла поворота при рулении меньше, по сравнению со случаем, когда абсолютное значение угла поворота при рулении больше.
[0036] Здесь, рассматривается случай, в котором водитель изменяет поддерживаемый крутящий момент поворота при рулении для того, чтобы выполнять коррекцию курса во время движения на повороте. На фиг. 13, когда поддерживаемый крутящий момент поворота при рулении уменьшается до T2 из состояния, в котором водитель поддерживает угол θ1 поворота при рулении при поддерживаемом крутящем моменте T1 поворота при рулении, угол поворота при рулении становится равным θ2, и угол поворота при рулении передних колес 5L, 5R уменьшается посредством уменьшения угла поворота при рулении. В этом случае, угол поворота при рулении значительно колеблется относительно изменения поддерживаемого крутящего момента поворота при рулении по мере того, как возрастает кривизна кривой вследствие характеристики силы реакции при рулении в вышеописанной SBW-системе. Другими словами, возникает проблема в том, что коррекция курса является затруднительной, поскольку чувствительность транспортного средства относительно крутящего момента поворота при рулении увеличивается по мере того, как возрастает кривизна кривой.
[0037] Напротив, управление смещением силы реакции на основе кривизны варианта 1 осуществления смещает, в направлении знака, идентичном направлению знака стабилизирующего крутящего момента, характеристику силу реакции при рулении, представляющую крутящий момент силы реакции при рулении, который соответствует стабилизирующему крутящему моменту, соразмерно большей кривизне сигнальной линии дорожной разметки, за счет чего характеристика, которая представляет взаимосвязь между углом поворота при рулении и углом поворота, смещается в направлении знака, идентичном направлению знака угла поворота при рулении, и изменяется с характеристики A на характеристику B, как показано на фиг. 14. Поскольку величина изменения угла поворота при рулении относительно величины изменения поддерживаемого крутящего момента поворота при рулении за счет этого уменьшается по мере того, как возрастает кривизна сигнальной линии дорожной разметки, величина Δθ1-4 уменьшения угла поворота при рулении меньше традиционной величины Δθ1-2 уменьшения, даже когда водитель уменьшает поддерживаемый крутящий момент поворота при рулении до T4, и величина Δθ3-4 уменьшения является идентичной традиционной величине Δθ1-2 уменьшения, показанной на фиг. 13. Другими словами, поскольку флуктуация угла поворота при рулении относительно изменения поддерживаемого крутящего момента поворота при рулении может уменьшаться соразмерно более высокой кривизне кривой, и может уменьшаться чувствительность транспортного средства относительно крутящего момента поворота при рулении, может сокращаться изменение поведения транспортного средства, и можно упрощать коррекцию курса, выполняемую водителем. Кроме того, поскольку поддерживаемый крутящий момент T3 поворота при рулении (<T1) для поддержания угла θ1 поворота при рулении может уменьшаться более значительно по сравнению с традиционными технологиями, можно уменьшать нагрузку по рулению на водителя во время движения на повороте.
[0038] Традиционно известна технология, в которой тренд в характеристике силы реакции при рулении уменьшается по мере того, как увеличивается кривизна сигнальной линии дорожной разметки, в целях уменьшения нагрузки по рулению водителя во время движения на повороте. Тем не менее, с этой традиционной технологией, флуктуация угла поворота при рулении относительно изменения поддерживаемого крутящего момента поворота при рулении больше по мере того, как возрастает кривизна, и чувствительность транспортного средства относительно крутящего момента поворота при рулении, следовательно, увеличена. Другими словами, смещение характеристики силы реакции при рулении в направлении, идентичном направлению стабилизирующего крутящего момента в соответствии с кривизной сигнальной линии дорожной разметки, позволяет как упрощать коррекцию курса, так и уменьшать нагрузку по рулению водителя во время движения на повороте.
[0039] Модуль вычисления смещения крутящего момента силы реакции при рулении
Фиг. 15 является блок-схемой управления модуля 36 вычисления смещения крутящего момента силы реакции при рулении.
Модуль 36a вычисления угла относительно вертикальной оси вычисляет угол относительно вертикальной оси в расположенной впереди точке фиксации. Вычисление угла относительно вертикальной оси на основе изображения проезжаемого пути, захваченного посредством камеры 17, дает возможность простого обнаружения угла относительно вертикальной оси с высокой точностью.
Модуль 36b вычисления поперечной позиции вычисляет поперечную позицию относительно левой и правой сигнальных линий дорожной разметки в расположенной впереди точке фиксации и поперечную позицию относительно левой и правой сигнальных линий дорожной разметки в текущей позиции. Здесь, модуль 36b вычисления поперечной позиции переключает поперечную позицию относительно левой и правой сигнальных линий дорожной разметки в текущей позиции, когда рассматриваемое транспортное средство пересекает сигнальную линию дорожной разметки и перемещается в смежную полосу движения, т.е. когда выполнена смена полосы движения. Другими словами, поперечная позиция относительно левой сигнальной линии дорожной разметки до наезда на сигнальную линию дорожной разметки используется в качестве поперечной позиции относительно правой сигнальной линии дорожной разметки после наезда на сигнальную линию дорожной разметки, а поперечная позиция относительно правой сигнальной линии дорожной разметки до наезда на сигнальную линию дорожной разметки используется в качестве поперечной позиции относительно левой сигнальной линии дорожной разметки после наезда на сигнальную линию дорожной разметки. Когда смена полосы движения выполнена на полосу движения, имеющую другую ширину полосы движения, ширина W2 полосы движения полосы движения после смены полосы движения умножается на поперечную позицию, переключенную для значения W2/W1, чтобы корректировать поперечную позицию, причем значение W2/W1 получается посредством деления ширины W2 полосы движения полосы движения после смены полосы движения на ширину W1 полосы движения полосы движения до смены полосы движения. Здесь, данные ширины полосы движения для полос движения получаются из навигационной системы 24.
Модуль 39 вычисления силы реакции на основе допустимого времени отклонения вычисляет силу реакции, которая соответствует допустимому времени отклонения, на основе скорости транспортного средства, угла относительно вертикальной оси и поперечной позиции относительно левой и правой сигнальных линий дорожной разметки в расположенной впереди точке фиксации. Ниже описываются подробности модуля 39 вычисления силы реакции на основе допустимого времени отклонения.
Модуль 40 вычисления силы реакции на основе поперечной позиции вычисляет силу реакции, которая соответствует поперечной позиции, на основе поперечной позиции относительно левой и правой сигнальных линий дорожной разметки в текущей позиции. Ниже описываются конкретные подробности модуля 40 вычисления силы реакции на основе поперечной позиции.
Модуль выбора силы реакции 36c выбирает, в качестве величины смещения крутящего момента силы реакции при рулении, большее абсолютное значение из силы реакции, которая соответствует допустимому времени отклонения, и силы реакции, которая соответствует поперечной позиции.
[0040] Процессор 42 подавления силы реакции вычисляет величину смещения для обработки подавления силы реакции (значение подавления) для уменьшения величины смещения крутящего момента силы реакции при рулении с постоянным наклоном, когда состояние продолжается в течение предварительно определенной продолжительности (например, 6 секунд), в которой величина смещения крутящего момента силы реакции при рулении (вычисленное значение), выведенная из модуля 36c выбора силы реакции, имеет предварительно определенное значение или выше, и начинает обработку подавления силы реакции для вывода величины смещения для обработки подавления силы реакции вместо вычисленного значения в качестве величины смещения крутящего момента силы реакции при рулении на последующей стадии. Предварительно определенная продолжительность является значением, при котором водитель считывает управление смещением силы реакции, которое основано на поперечной позиции и времени до выезда за пределы полосы движения (*1). Другими словами, предварительно определенная продолжительность является значением трения устройства руления. Величина смещения для обработки подавления силы реакции поддерживается равной пороговому значению для восстановления, когда впоследствии величина смещения для обработки подавления силы реакции меньше предварительно определенного порогового значения для восстановления. Предварительно определенное пороговое значение для восстановления меньше предварительно определенного порогового значения и является значением, при котором водитель не считывает то, что управление смещением силы реакции выполняется на основе поперечной позиции и времени до выезда за пределы полосы движения. Другими словами, предварительно определенное пороговое значение для восстановления меньше значения трения устройства руления. Когда вычисленный угол относительно вертикальной оси в модуле 36a вычисления угла относительно вертикальной оси меньше предварительно определенного угла, в то время как величина смещения для обработки подавления силы реакции поддерживается, транспортное средство оценивается как находящееся в состоянии движения по прямой, обработка подавления силы реакции отменяется, и вычисляется величина смещения для обработки подавления силы реакции для восстановления поддерживаемого значения до вычисленного значения с постоянным наклоном. Вычисленное значение непосредственно выводится после того, как поддерживаемое значение восстановлено до вычисленного значения. Вычисленное значение выводится, когда вычисленное значение становится меньше значения подавления во время обработки подавления силы реакции. Другими словами, величина смещения крутящего момента силы реакции при рулении определяется посредством выбора наименьшего из вычисленного значения и значения подавления. Обработка подавления силы реакции отменяется, когда вычисленное значение становится меньше порогового значения для восстановления во время обработки подавления силы реакции, и в этом случае, одновременно с этой отменой, выполняется переключение с вывода значения подавления на вывод вычисленного значения.
Процессор 42 подавления силы реакции задает флаг обработки подавления силы реакции в начальный момент времени обработки подавления силы реакции и сбрасывает флаг обработки подавления силы реакции в момент времени отмены обработки подавления силы реакции. Когда флаг обработки подавления силы реакции находится в состоянии сброса, вычисленное значение, т.е. величина смещения крутящего момента силы реакции при рулении, выведенная из модуля 36c выбора силы реакции, выводится, за исключением случая восстановления, с постоянным наклоном от значения подавления к вычисленному значению.
Процессор 36d задания ограничений задает верхний предел скорости изменения и максимальное значение величины смещения крутящего момента силы реакции при рулении. Например, максимальное значение составляет 2 Нм, и верхний предел скорости изменения составляет 10 Нм/с.
[0041] Фиг. 16 является блок-схемой управления модуля 39 вычисления силы реакции на основе допустимого времени отклонения.
Умножитель 39a умножает скорость транспортного средства на угол относительно вертикальной оси, чтобы определять поперечную скорость транспортного средства.
Делитель 39b делит поперечную позицию относительно левой сигнальной линии дорожной разметки в расположенной впереди точке фиксации на поперечную скорость, чтобы определять допустимое время отклонения относительно левой сигнальной линии дорожной разметки.
Делитель 39c делит поперечную позицию относительно правой сигнальной линии дорожной разметки в расположенной впереди точке фиксации на поперечную скорость, чтобы определять допустимое время отклонения относительно правой сигнальной линии дорожной разметки.
Модуль 39d выбора допустимого времени отклонения выбирает меньшее допустимое время отклонения относительно левой и правой сигнальных линий дорожной разметки в качестве допустимого времени отклонения.
Модуль 39e вычисления силы реакции на основе допустимого времени отклонения вычисляет силу реакции, которая соответствует допустимому времени отклонения, на основе допустимого времени отклонения. Сила реакции, которая соответствует допустимому времени отклонения, является обратно пропорциональной (пропорциональной обратной величине допустимого времени отклонения) допустимому времени отклонения и является характерной в отношении того, что она составляет примерно нуль через три секунды или больше.
[0042] Фиг. 17 является блок-схемой управления модуля 40 вычисления силы реакции на основе поперечной позиции.
Модуль 40a вычитания вычитает поперечную позицию относительно левой полосы движения из целевой левой поперечной позиции (например, 90 см), заданной заранее для того, чтобы определять отклонение поперечной позиции относительно левой полосы движения.
Модуль 40b вычитания вычитает поперечную позицию относительно правой полосы движения из целевой правой поперечной позиции (например, 90 см), заданной заранее для того, чтобы определять отклонение поперечной позиции относительно правой полосы движения.
Модуль 40c выбора отклонения поперечной позиции выбирает в качестве отклонения поперечной позиции большее из отклонений поперечной позиции относительно левой и правой полос движения.
Модуль 40d вычисления силы реакции на основе отклонения поперечной позиции вычисляет силу реакции, которая соответствует поперечной позиции, на основе отклонения поперечной позиции. Сила реакции, которая соответствует поперечной позиции, задает верхний предел и является характерной в отношении того, что она увеличивается по мере того, как больше отклонение поперечной позиции.
[0043] Преимущество управления смещением силы реакции на основе поперечной позиции
Управление смещением силы реакции на основе поперечной позиции суммирует с крутящим моментом силы реакции при рулении силу реакции, которая соответствует поперечной позиции, в качестве величины смещения крутящего момента силы реакции при рулении. Характеристика силы реакции при рулении, представляющая крутящий момент силы реакции при рулении, который соответствует стабилизирующему крутящему моменту, за счет этого смещается более значительно в направлении, в котором абсолютное значение крутящего момента силы реакции при рулении увеличивается соразмерно меньшему расстоянию до сигнальной линии дорожной разметки, как показано на фиг. 18. Фиг. 18 показывает случай близости к правой полосе движения, и смещение возникает в направлении, противоположном относительно направления на фиг. 18, в случае близости к левой полосе движения.
[0044] Здесь при традиционном управлении силой реакции при рулении рассматривается случай, в котором позиция движения транспортного средства смещена в правую сторону вследствие неожиданной операции увеличенного руления в направлении вправо водителем, и водитель после этого возвращает позицию движения в окрестность центра полосы движения с использованием корректирующего руления. Угол поворота при рулении и крутящий момент поворота при рулении, когда водитель выполняет неожиданную операцию, показаны в позиции точки P1 на характеристике A по фиг. 19. Характеристика A представляет взаимосвязь между углом поворота при рулении и крутящим моментом поворота при рулении, когда задана характеристика силы реакции при рулении, моделирующая традиционное устройство руления. Чтобы возвращать позицию движения из этого состояния в окрестность центра полосы движения, передние колеса должны поворачиваться влево, и в силу этого водитель, после выполнения операции возврата в нейтральную позицию угла поворота при рулении, выполняет операцию увеличенного руления из нейтральной позиции угла поворота при рулении, чтобы обеспечивать совмещение руля с целевым углом θ5. В этот момент, в вышеописанной традиционной технологии, поскольку нейтральная позиция угла поворота при рулении (нулевая точка угла поворота при рулении) и нейтральная позиция крутящего момента поворота при рулении (нулевая точка крутящего момента поворота при рулении) совпадают друг с другом, крутящий момент поворота при рулении должен уменьшаться в нейтральную позицию угла поворота при рулении, и крутящий момент поворота при рулении должен увеличиваться, если превышена нейтральная позиция угла поворота при рулении. Другими словами, когда выполняется корректирующее руление для перехода нейтральной позиции угла поворота при рулении, знак крутящего момента поворота при рулении изменяется на противоположный, переключается направление, в котором водитель управляет силой, и величина изменения угла поворота при рулении относительно величины изменения крутящего момента поворота при рулении около нейтральной позиции крутящего момента поворота при рулении является очень низкой по сравнению с другими областями угла поворота при рулении. Следовательно, нагрузка по рулению на водителя является высокой, и затруднительно обеспечивать соответствие руля целевому углу θ5. В силу этого возникает такая проблема, что позиция движения транспортного средства легко выходит за установленные пределы и в силу этого способствует увеличению величины корректирующего руления.
[0045] Напротив, при управлении смещением силы реакции на основе поперечной позиции варианта 1 осуществления крутящий момент силы реакции при рулении, который соответствует стабилизирующему крутящему моменту, смещается, соразмерно меньшему расстоянию до сигнальной линии дорожной разметки, в направлении, в котором увеличивается абсолютное значение крутящего момента силы реакции при рулении, за счет чего характеристика, представляющая взаимосвязь между углом поворота при рулении и углом поворота, смещается в направлении, в котором увеличивается абсолютное значение крутящего момента поворота при рулении, и характеристика изменяется непрерывно с характеристики A на характеристику C соразмерно меньшему расстоянию до сигнальной линии дорожной разметки, как показано на фиг. 20. В этот момент, крутящий момент поворота при рулении должен увеличиваться, чтобы поддерживать угол поворота при рулении, и поскольку руль 6 постепенно возвращается в нейтральную позицию угла поворота при рулении (точка P1 → точка P2) при условии, что крутящий момент поворота при рулении является постоянным, можно подавлять смещение позиции движения транспортного средства в правую сторону посредством неожиданной операции увеличенного руления водителем. С другой стороны, когда водитель поддерживает угол поворота при рулении, угол поворота при рулении и крутящий момент поворота при рулении перемещаются из точки P1 в точку P3. Когда водитель выполняет корректирующее руление из этого состояния в характеристике C, нейтральная позиция крутящего момента поворота при рулении смещается в сторону увеличенного руления более значительно, чем нейтральная позиция угла поворота при рулении, и знак крутящего момента поворота при рулении, следовательно, не изменяется на противоположный до тех пор, пока крутящий момент поворота при рулении не достигнет нейтральной позиции крутящего момента поворота при рулении во время операции увеличенного руления из нейтральной позиции угла поворота при рулении. Следовательно, водитель просто уменьшает крутящий момент поворота при рулении и прекращает вращение руля 6, когда руль 6 достигает целевого угла, чтобы за счет этого управлять углом поворота передних колес 5L, 5R. Другими словами, при управлении смещением силы реакции на основе поперечной позиции в варианте 1 осуществления, затруднительно переключать направление, в котором водитель управляет силой, и, следовательно, может упрощаться корректирующее руление водителем. Как результат, позиция движения транспортного средства не подвержена выходу за установленные пределы, и может уменьшаться величина корректирующего руления.
[0046] Традиционно известна технология для того, чтобы увеличивать силу реакции при рулении соразмерно при приближении к сигнальной линии дорожной разметки в целях подавления смещения позиции движения вследствие неожиданной операции водителем, но в традиционной технологии, руль просто сконструирован таким образом, что его труднее поворачивать соразмерно при приближении к сигнальной линии дорожной разметки, и поскольку нейтральная позиция крутящего момента поворота при рулении в характеристике силы реакции при рулении постоянно совпадает с нейтральной позицией угла поворота при рулении, знак крутящего момента угла поворота при рулении изменяется на противоположный при корректирующем рулении, которое переходит нейтральную позицию угла поворота при рулении, и нагрузка по рулению на водителя не уменьшается. Другими словами, крутящий момент силы реакции при рулении, который соответствует стабилизирующему крутящему моменту, смещается, соразмерно меньшему расстоянию до сигнальной линии дорожной разметки, в направлении, в котором увеличивается абсолютное значение крутящего момента силы реакции при рулении, в силу этого позволяя реализовывать как подавление смещения позиции движения, так и уменьшение нагрузки по рулению на водителя.
[0047] Кроме того, при управлении смещением силы реакции на основе поперечной позиции варианта 1 осуществления, величина смещения увеличивается по мере того, как уменьшается расстояние до сигнальной линии дорожной разметки, и нейтральная позиция крутящего момента поворота при рулении, следовательно, дополнительно смещается в позицию в направлении от нейтральной позиции угла поворота при рулении по мере того, как уменьшается расстояние до сигнальной линии дорожной разметки. Когда водитель выполняет корректирующее руление для возвращения позиции движения транспортного средства в окрестность центра полосы движения, величина увеличенного руления из нейтральной позиции угла поворота при рулении должна увеличиваться при большей близости к сигнальной линии дорожной разметки. В этот момент, возможно то, что крутящий момент поворота при рулении превышает нейтральную позицию, и знак крутящего момента поворота при рулении изменяется на противоположный до того, как руль достигает целевого угла, когда величина смещения нейтральной позиции крутящего момента поворота при рулении является низкой относительно нейтральной позиции угла поворота при рулении. Следовательно, увеличение величины смещения по мере того, как уменьшается расстояние до сигнальной линии дорожной разметки, позволяет подавлять превышение нейтральной позиции посредством крутящего момента поворота при рулении.
[0048] При управлении смещением силы реакции на основе поперечной позиции варианта 1 осуществления модуль 36b вычисления поперечной позиции переключает поперечную позицию относительно левой и правой сигнальных линий дорожной разметки в текущей позиции, когда рассматриваемое транспортное средство достигает сигнальной линии дорожной разметки. При управлении смещением силы реакции на основе поперечной позиции, увеличение силы реакции при рулении по мере того, как рассматриваемое транспортное средство движется в направлении от окрестности центра полосы движения, упрощает возвращение рассматриваемого транспортного средства в окрестность центра полосы движения. Другими словами, интегрированное значение угла относительно вертикальной оси (изменение поперечной позиции) рассматривается в качестве внешнего возмущения, и сила реакции при рулении управляется таким образом, чтобы направлять транспортное средство в направлении, которое исключает интегрированное значение угла относительно вертикальной оси. По этой причине, интегрированное значение угла относительно вертикальной оси должно сбрасываться, когда выполняется смена полосы движения. Если интегрированное значение угла относительно вертикальной оси не сбрасывается, то операция водителем затрудняется, поскольку сила реакции при рулении для возвращения транспортного средства в окрестность центра полосы движения до смены полосы движения по-прежнему действует даже после смены полосы движения. Простое задание интегрированного значения равным нулю не дает возможность направления транспортного средства в окрестность центра полосы движения после смены полосы движения.
[0049] С учетом вышеизложенного, в варианте 1 осуществления, когда рассматриваемое транспортное средство наезжает на сигнальную линию дорожной разметки, это считается преднамеренной операцией водителя, и поперечная позиция относительно левой и правой сигнальных линий дорожной разметки в текущей позиции переключается в таком случае. Другими словами, изменение на противоположный знака интегрированного значения угла относительно вертикальной оси переключает позицию для направления рассматриваемого транспортного средства из окрестности центра полосы движения до смены полосы движения в окрестность центра полосы движения после смены полосы движения и дает возможность формирования силы реакции при рулении для направления рассматриваемого транспортного средства в окрестность центра полосы движения после смены полосы движения. В этот момент, учитывается отношение W2/W1, которое является шириной W2 полосы движения полосы движения после смены полосы движения относительно ширины W1 полосы движения полосы движения до смены полосы движения, и, следовательно, можно задавать точную поперечную позицию и задавать оптимальную величину смещения для направления рассматриваемого транспортного средства в окрестность центра полосы движения.
[0050] Преимущество управления смещением силы реакции на основе допустимого времени отклонения
Управление смещением силы реакции на основе допустимого времени отклонения суммирует силу реакции на основе допустимого времени отклонения в качестве величины смещения крутящего момента силы реакции при рулении с крутящим моментом силы реакции при рулении. Характеристика силы реакции при рулении, представляющая крутящий момент силы реакции при рулении, который соответствует стабилизирующему крутящему моменту, за счет этого смещается в направлении, в котором абсолютное значение крутящего момента силы реакции при рулении увеличивается по мере того, как уменьшается допустимое время отклонения, как показано на фиг. 18. Фиг. 18 показывает случай нахождения рассматриваемого транспортного средства около правой полосы движения, и когда рассматриваемое транспортное средство находится около левой полосы движения, смещение возникает в направлении, противоположном относительно направления на фиг. 18.
[0051] По этой причине характеристика, представляющая взаимосвязь между углом поворота при рулении и крутящим моментом поворота при рулении, смещается в направлении, в котором увеличивается абсолютное значение крутящего момента поворота при рулении, и характеристика изменяется непрерывно с характеристики A на характеристику C соразмерно меньшему допустимому времени отклонения, как показано на фиг. 20. В этот момент, крутящий момент поворота при рулении должен увеличиваться, чтобы поддерживать угол поворота при рулении, и поскольку руль 6 постепенно возвращается в нейтральную позицию угла поворота при рулении (точка P1 → точка P2) при условии, что крутящий момент поворота при рулении является постоянным, можно подавлять смещение позиции движения транспортного средства в правую сторону посредством неожиданной операции увеличенного руления водителем. С другой стороны, когда водитель поддерживает угол поворота при рулении, угол поворота при рулении и крутящий момент поворота при рулении перемещаются из точки P1 в точку P3. Когда водитель выполняет корректирующее руление из этого состояния в характеристике C, нейтральная позиция крутящего момента поворота при рулении смещается в сторону увеличенного руления более значительно, чем нейтральная позиция угла поворота при рулении, и знак крутящего момента поворота при рулении, следовательно, не изменяется на противоположный до тех пор, пока крутящий момент поворота при рулении не достигнет нейтральной позиции крутящего момента поворота при рулении во время операции увеличенного руления из нейтральной позиции угла поворота при рулении. Следовательно, водитель просто уменьшает крутящий момент поворота при рулении и прекращает вращение руля 6, когда руль 6 достигает целевого угла, чтобы за счет этого управлять углом поворота передних колес 5L, 5R. Другими словами, при управлении смещением силы реакции на основе допустимого времени отклонения в варианте 1 осуществления, затруднительно переключать направление, в котором водитель управляет силой, и, следовательно, может упрощаться корректирующее руление водителем. Как результат, позиция движения транспортного средства не подвержена выходу за установленные пределы, и может уменьшаться величина корректирующего руления.
[0052] Кроме того, при управлении смещением силы реакции на основе допустимого времени отклонения варианта 1 осуществления величина смещения увеличивается по мере того, как уменьшается допустимое время отклонения, и нейтральная позиция крутящего момента поворота при рулении, следовательно, дополнительно смещается к позиции на большом расстоянии от нейтральной позиции угла поворота при рулении по мере того, как уменьшается допустимое время отклонения. Когда водитель выполняет корректирующее руление для возвращения позиции движения транспортного средства в окрестность центра полосы движения, вероятность того, что рассматриваемое транспортное средство находится около сигнальной линии дорожной разметки, увеличивается по мере того, как уменьшается допустимое время отклонения, и рабочая величина увеличенного руления из нейтральной позиции угла поворота при рулении должна увеличиваться соразмерно поблизости от сигнальной линии дорожной разметки. В этот момент, возможно то, что крутящий момент поворота при рулении превышает нейтральную позицию, и знак крутящего момента поворота при рулении изменяется на противоположный до того, как руль достигает целевого угла, когда величина смещения нейтральной позиции крутящего момента поворота при рулении является низкой относительно нейтральной позиции угла поворота при рулении. Следовательно, увеличение величины смещения по мере того, как уменьшается расстояние до сигнальной линии дорожной разметки, позволяет подавлять превышение нейтральной позиции посредством крутящего момента поворота при рулении.
[0053] Комбинированное преимущество видов управления смещением силы реакции на основе поперечной позиции и допустимого времени отклонения
В модуле 20 управления силой реакции при рулении, большее из абсолютных значений силы реакции на основе допустимого времени отклонения и силы реакции на основе поперечной позиции выбирается в качестве величины смещения силы реакции при рулении в модуле 36 вычисления смещения крутящего момента силы реакции при рулении, и величина смещения силы реакции при рулении суммируется с крутящим моментом силы реакции при рулении в сумматоре 20c. Характеристика силы реакции при рулении на основе допустимого времени отклонения или поперечной позиции смещается в направлении, в котором увеличивается абсолютное значение крутящего момента силы реакции при рулении.
При управлении смещением силы реакции на основе допустимого времени отклонения, сила реакции на основе допустимого времени отклонения является нулевой, когда рассматриваемое транспортное средство и сигнальная линия дорожной разметки являются параллельными, т.е. когда угол относительно вертикальной оси является нулевым. По этой причине, только небольшая величина силы реакции прикладывается, когда угол относительно вертикальной оси является низким, даже когда рассматриваемое транспортное средство находится в позиции около сигнальной линии дорожной разметки. Напротив, при управлении смещением силы реакции на основе поперечной позиции, сила реакции (сила реакции, которая соответствует поперечной позиции) формируется пропорционально расстоянию до сигнальной линии дорожной разметки, и, следовательно, может формироваться большая сила реакции соразмерно меньшему расстоянию до сигнальной линии дорожной разметки, и рассматриваемое транспортное средство может легко возвращаться в окрестность центра полосы движения.
[0054] С другой стороны, при управлении смещением силы реакции на основе поперечной позиции, сила реакции, которая соответствует поперечной позиции, является нулевой, когда рассматриваемое транспортное средство находится в окрестности центра полосы движения. Соответственно, затруднительно увеличивать силу реакции при рулении с хорошим откликом относительно наезда на сигнальную линию дорожной разметки за короткий период времени, когда угол относительно вертикальной оси является большим, и, помимо этого, скорость транспортного средства является высокой даже в окрестности центра полосы движения. Напротив, при управлении смещением силы реакции на основе допустимого времени отклонения, формируется сила реакции (сила реакции на основе допустимого времени отклонения), которая соответствует допустимому времени отклонения, и упомянутая сила реакции является характерной в отношении быстрого повышения, когда допустимое время отклонения составляет три секунды или меньше. Следовательно, сила реакции при рулении может увеличиваться с хорошим откликом, и отклонение от полосы движения может подавляться, даже когда имеется короткий период времени до достижения сигнальной линии дорожной разметки.
Следовательно, комбинированное использование управления смещением силы реакции на основе допустимого времени отклонения и управления смещением силы реакции на основе поперечной позиции позволяет прикладывать устойчивую силу реакции в соответствии с расстоянием до сигнальной линии дорожной разметки и эффективно подавлять отклонение от полосы движения. В этот момент, использование большего из абсолютных значений силы реакции на основе допустимого времени отклонения и силы реакции на основе поперечной позиции позволяет постоянно прикладывать требуемую силу реакции при рулении оптимальным способом.
[0055] Операция прекращения помощи при вождении
Фиг. 21 является временной диаграммой величины смещения крутящего момента силы реакции при рулении и силы реакции, соответствующей поперечной позиции, когда состояние, в котором величина смещения крутящего момента силы реакции при рулении имеет пороговое значение или выше, продолжается в течение предварительно определенной продолжительности.
Во время t1 величина смещения крутящего момента силы реакции при рулении соответствует пороговому значению.
Время t2 обработка подавления силы реакции начинается, поскольку предварительно определенная продолжительность истекла с величиной смещения крутящего момента силы реакции при рулении, превышающей пороговое значение.
В интервале от времени t2 до t3 величина смещения крутящего момента силы реакции при рулении уменьшается с постоянным наклоном. Между тем, сила реакции на основе поперечной позиции поддерживает вычисленное значение в момент времени начала обработки подавления силы реакции. В это время, когда вычисленное значение величины смещения крутящего момента силы реакции при рулении становится меньше значения подавления, величина смещения крутящего момента силы реакции при рулении придерживается вычисленного значения, как указано посредством штрихпунктирной линии с двумя точками. То же применимо к силе реакции на основе поперечной позиции.
Во время t3 величина смещения крутящего момента силы реакции при рулении становится меньше порогового значения для восстановления, и величина смещения крутящего момента силы реакции при рулении, следовательно, поддерживается равной пороговому значению для восстановления.
В интервале от времени t3 до t4 величина смещения крутящего момента силы реакции при рулении и сила реакции на основе поперечной позиции являются постоянной величиной.
Во время t4 обработка подавления силы реакции отменяется посредством оценки движения по прямой на основе угла относительно вертикальной оси.
Во время t4 и далее величина смещения крутящего момента силы реакции при рулении и сила реакции на основе поперечной позиции увеличиваются с постоянным наклоном и за счет этого восстанавливаются до вычисленного значения на основе поперечной позиции, и управление после этого возвращается к нормальному управлению.
[0056] В варианте 1 осуществления выезд за пределы полосы движения подавляется посредством двух форм управления силой реакции (управления смещением силы реакции на основе поперечной позиции и управления смещением силы реакции на основе времени до выезда за пределы полосы движения) и одной формы управления при повороте (F/B-управления поперечной позицией), чтобы выполнять помощь при вождении для водителя. Хотя множество случаев помощи при вождении на основе сигнальных линий дорожной разметки снижает утомление водителя, имеется недостаток в том, что водитель может чрезмерно доверять помощи при вождении, как если выполняется автоматизированное вождение, когда помощь при вождении продолжается в течение длительного периода времени, и может уменьшаться внимательность при вождении.
Напротив, в варианте 1 осуществления, обработка подавления силы реакции для уменьшения величины смещения крутящего момента силы реакции при рулении выполняется, когда состояние, в котором величина смещения крутящего момента силы реакции при рулении имеет пороговое значение или больше, продолжается в течение предварительно определенной продолжительности (6 секунд). Поскольку водитель за счет этого может осознавать, что помощь при вождении на основе поперечной позиции прекращена, посредством уменьшения силы реакции при рулении, может подавляться чрезмерное доверие помощи при вождении водителем, и может увеличиваться внимательность водителя при вождении. Поскольку отсутствует прямое влияние на поведение транспортного средства, даже если сила реакции при рулении уменьшается, транспортное средство не подвержено выезду за пределы сигнальных линий дорожной разметки. Кроме того, величина смещения крутящего момента силы реакции при рулении постепенно уменьшается, и, следовательно, неприятное ощущение, вызываемое у водителя вследствие уменьшенной силы реакции, может уменьшаться. Поскольку величина смещения крутящего момента силы реакции при рулении уменьшается до порогового значения для восстановления, при котором водитель не считывает управление, можно надежно заставлять водителя осознавать, что помощь при вождении прекращена. Вычисление величины смещения крутящего момента силы реакции при рулении на основе поперечной позиции продолжается даже во время обработки подавления силы реакции, и в силу этого можно подавлять возникновение задержки реакции на управляющее воздействие, когда выполнен переход к нормальному управлению на основе поперечной позиции.
[0057] В варианте 1 осуществления, обработка подавления силы реакции отменяется, когда состояние движения по прямой оценено во время обработки подавления силы реакции. Возвращение величины смещения крутящего момента силы реакции при рулении и силы реакции на основе поперечной позиции к нормальному значению (вычисленному значению), когда направление движения транспортного средства и ориентация сигнальных линий дорожной разметки совпадают, позволяет переходить к нормальному управлению после того, как транспортное средство достигает устойчивого состояния, и в силу этого можно подавлять неустойчивость в поведении транспортного средства, когда выполняется переход от обработки подавления силы реакции к нормальному управлению.
В варианте 1 осуществления, величина смещения крутящего момента силы реакции при рулении придерживается вычисленного значения (штрихпунктирная линия с двумя точками величины смещения крутящего момента силы реакции при рулении на фиг. 21), когда вычисленное значение величины смещения крутящего момента силы реакции при рулении становится меньше значения подавления во время обработки подавления силы реакции. Если значение подавления выбирается, когда вычисленное значение становится меньше значения подавления, фактическая сила реакции при рулении должна быть чрезмерной относительно силы реакции при рулении, которая должна выводиться первоначально, и водитель должен испытывать неприятное ощущение. Следовательно, придерживание вычисленного значения в этом случае позволяет уменьшать неприятное ощущение, вызываемое у водителя. То же применимо к силе реакции на основе поперечной позиции, и когда вычисленное значение силы реакции на основе поперечной позиции становится меньше поддерживаемого значения во время обработки подавления силы реакции, сила реакции на основе поперечной позиции принудительно придерживается вычисленного значения (штрихпунктирная линия с двумя точками силы реакции на основе поперечной позиции на фиг. 21). За счет этого можно подавлять становление чрезмерно большим задаваемого угла поворота для подавления внешних возмущений относительно задаваемого угла поворота для подавления внешних возмущений, который должен выводиться первоначально, может уменьшаться неприятное ощущение, вызываемое у водителя, и могут подавляться возмущения в поведении транспортного средства.
В варианте 1 осуществления, сила реакции на основе поперечной позиции поддерживается равной значению в начальный момент времени обработки подавления силы реакции, когда состояние, в котором величина смещения крутящего момента силы реакции при рулении имеет пороговое значение или больше, продолжается в течение предварительно определенной продолжительности (6 секунд) при обработке подавления силы реакции. Если сила реакции на основе поперечной позиции уменьшается, транспортное средство подвержено выезду за пределы сигнальной линии дорожной разметки. С другой стороны, становится затруднительнее заставлять водителя осознавать, что помощь при вождении прекращена, когда сила реакции на основе поперечной позиции увеличивается. Следовательно, поддержание силы реакции на основе поперечной позиции позволяет заставлять водителя осознавать, что помощь при вождении прекращена, при одновременном подавлении выезда за пределы полосы движения.
[0058] Как описано выше, вариант 1 осуществления имеет нижеприведенные преимущества.
(1) Устройство управления рулением содержит: электромотор 8 для формирования силы реакции (актуатор силы реакции при рулении) для приложения силы реакции при рулении к модулю 1 руления; модуль 36 вычисления смещения крутящего момента силы реакции при рулении (средство вычисления величины управления силой реакции при рулении) для вычисления величины смещения крутящего момента силы реакции при рулении (величины управления силой реакции при рулении), при которой сила реакции при рулении увеличивается в направлении, в котором поперечная позиция рассматриваемого транспортного средства отдаляется от сигнальной линии дорожной разметки в соразмерной близости к сигнальной линии дорожной разметки; формирователь 23 сигналов управления электрического тока (средство управления силой реакции при рулении) для управления электромотором 8 для формирования силы реакции на основе величины смещения крутящего момента силы реакции при рулении; поворотный электромотор 13 (поворотный актуатор) для приложения крутящего момента поворота к поворотному узлу 2, механически отделенному от модуля 1 руления; модуль 38 вычисления силы реакции на основе поперечной позиции (средство вычисления величины управления при повороте) для вычисления силы реакции на основе поперечной позиции (величины управления при повороте), при которой величина поворачивания увеличивается в направлении, в котором поперечная позиция рассматриваемого транспортного средства отдаляется от сигнальной линии дорожной разметки в соразмерной близости к сигнальной линии дорожной разметки; формирователь 22 сигналов управления электрического тока (средство управления поворотом) для управления поворотным электромотором 13 на основе силы реакции на основе поперечной позиции; процессор 42 подавления силы реакции (средство обработки подавления силы реакции) для вычисления величины смещения для обработки подавления силы реакции (величины управления силой реакции при рулении для обработки подавления силы реакции) для уменьшения величины смещения крутящего момента силы реакции при рулении, когда состояние, в котором величина смещения крутящего момента силы реакции при рулении имеет предварительно определенное пороговое значение или выше, длится в течение предварительно определенной продолжительности, и для обработки подавления силы реакции для управления электромотором 8 для формирования силы реакции на основе величины смещения для обработки подавления силы реакции вместо величины смещения крутящего момента силы реакции при рулении; и модуль 41 поддержания силы реакции на основе поперечной позиции (средство поддержания величины поворачивания) для поддержания силы реакции на основе поперечной позиции равной значению, возникающему в начальный момент времени обработки подавления силы реакции, когда начата обработка подавления силы реакции.
Водитель за счет этого может осознавать, что помощь при рулении на основе поперечной позиции прекращена, посредством уменьшения силы реакции при рулении, и в силу этого можно подавлять доверие водителя помощи при вождении. Как результат, можно повышать внимание водителя при вождении при подавлении выезда за пределы полосы движения.
[0059] (2) Процессор 42 подавления силы реакции поддерживает величину смещения обработки подавления силы реакции равной предварительно определенному пороговому значению для восстановления, когда величина смещения для обработки подавления силы реакции уменьшена до порогового значения для восстановления.
За счет этого можно заставлять водителя осознавать, что помощь при вождении прекращена, без прекращения управления, и можно подавлять возникновение задержки реакции, когда выполнен переход к нормальному управлению.
[0060] (3) Предоставляется модуль 36a вычисления угла относительно вертикальной оси (средство оценки движения по прямой) для оценки состояния движения по прямой транспортного средства, при этом процессор 42 подавления силы реакции отменяет обработку подавления силы реакции, когда движение оценивается в качестве движения по прямой, в то время как величина смещения для обработки подавления силы реакции поддерживается, и восстанавливает величину смещения для обработки подавления силы реакции до величины смещения крутящего момента силы реакции при рулении.
За счет этого можно переходить к нормальному управлению после того, как транспортное средство достигает устойчивого состояния, и в силу этого можно подавлять неустойчивость в поведении транспортного средства, когда выполняется переход от обработки подавления силы реакции к нормальному управлению.
[0061] (4) Процессор 42 подавления силы реакции передает величину смещения крутящего момента силы реакции при рулении в электромотор 8 для формирования силы реакции, когда величина смещения крутящего момента силы реакции при рулении становится меньше обработки подавления силы реакции во время обработки подавления силы реакции.
За счет этого можно подавлять приложение чрезмерной силы реакции при рулении относительно силы реакции при рулении, которая должна выводиться первоначально, и может уменьшаться неприятное ощущение, вызываемое у водителя.
[0062] (5) Модуль 41 поддержания силы реакции на основе поперечной позиции восстанавливает поддерживаемую силу реакции на основе поперечной позиции до силы реакции на основе поперечной позиции, вычисленной посредством модуля 38 вычисления силы реакции на основе поперечной позиции, когда обработка подавления силы реакции отменена.
За счет этого можно переходить к нормальному управлению после того, как транспортное средство достигает устойчивого состояния, и в силу этого можно подавлять неустойчивость в поведении транспортного средства, когда выполняется переход от обработки подавления силы реакции к нормальному управлению.
[0063] (6) Модуль 41 поддержания силы реакции на основе поперечной позиции прикладывает силу реакции на основе поперечной позиции к поворотному электромотору 13, когда сила реакции на основе поперечной позиции, вычисленная посредством модуля 38 вычисления силы реакции на основе поперечной позиции, становится меньше значения, возникающего в момент времени начала обработки подавления силы реакции после того, как начата обработка подавления силы реакции.
За счет этого можно подавлять становление чрезмерно большим задаваемого угла поворота для подавления внешних возмущений относительно задаваемого угла поворота для подавления внешних возмущений, который должен выводиться первоначально, и можно подавлять неприятное ощущение, вызываемое у водителя, и возмущения в поведении транспортного средства.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ РУЛЕНИЕМ | 2013 |
|
RU2582517C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РУЛЕНИЕМ | 2013 |
|
RU2576553C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ УСТОЙЧИВОСТЬЮ | 2013 |
|
RU2644063C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РУЛЕНИЕМ | 2013 |
|
RU2623359C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РУЛЕНИЕМ | 2013 |
|
RU2581809C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РУЛЕНИЕМ | 2013 |
|
RU2581808C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РУЛЕНИЕМ | 2013 |
|
RU2582012C1 |
| УСТРОЙСТВО ПОМОЩИ ПРИ ВОЖДЕНИИ В ПОЛОСЕ | 2014 |
|
RU2647823C2 |
| УСТРОЙСТВО ПОМОЩИ ПРИ ВОЖДЕНИИ ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2566175C1 |
| ПОМОЩНИК ПРИ ВОЖДЕНИИ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ ПОМОЩИ ПРИ ВОЖДЕНИИ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2492082C1 |
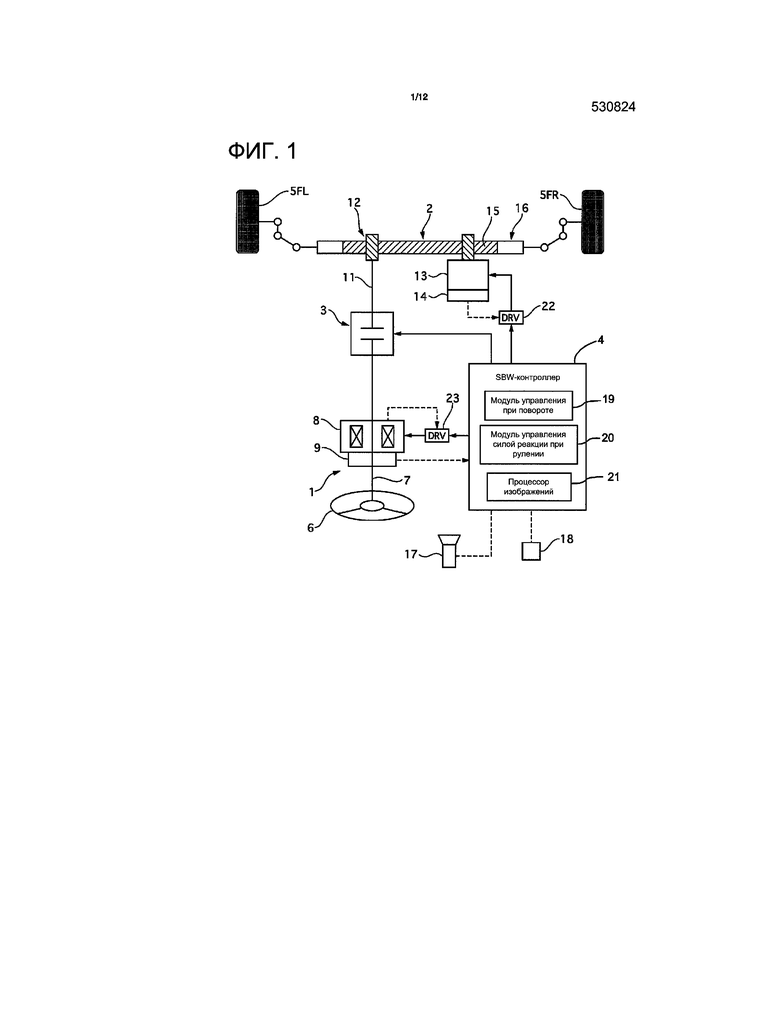
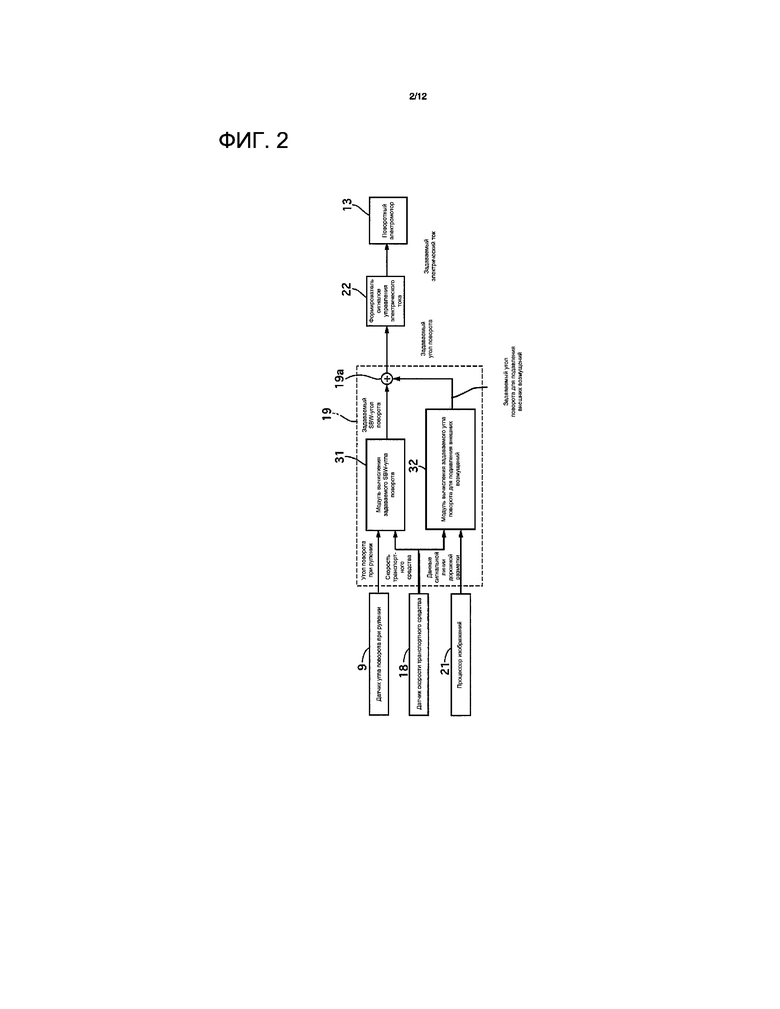
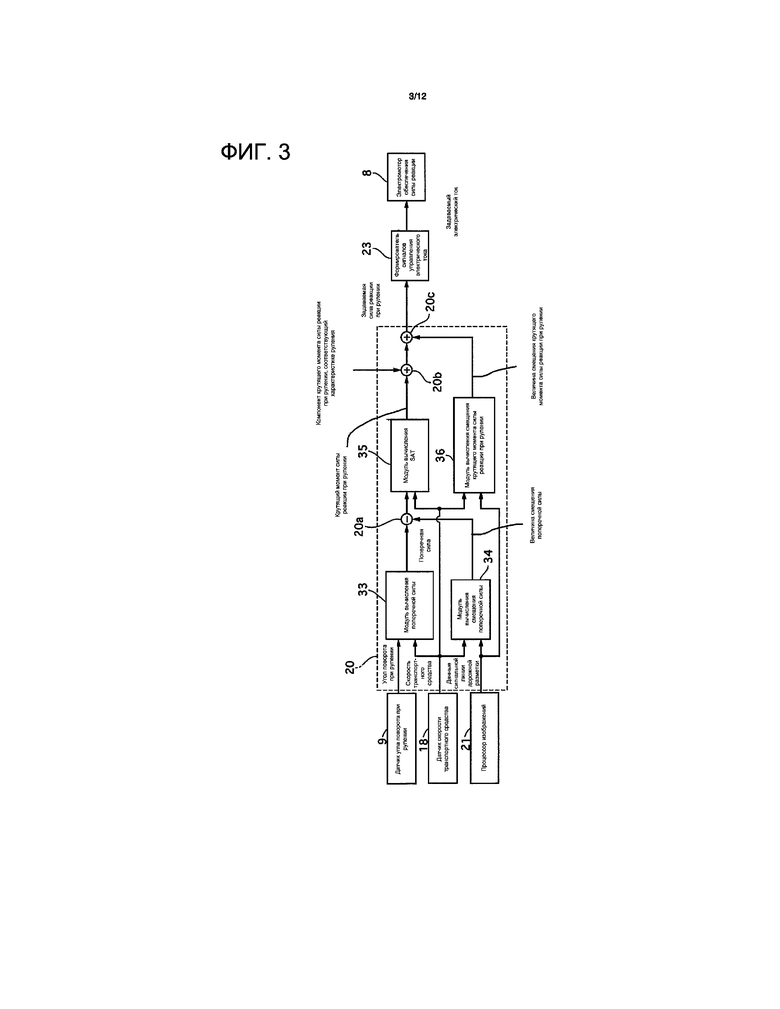
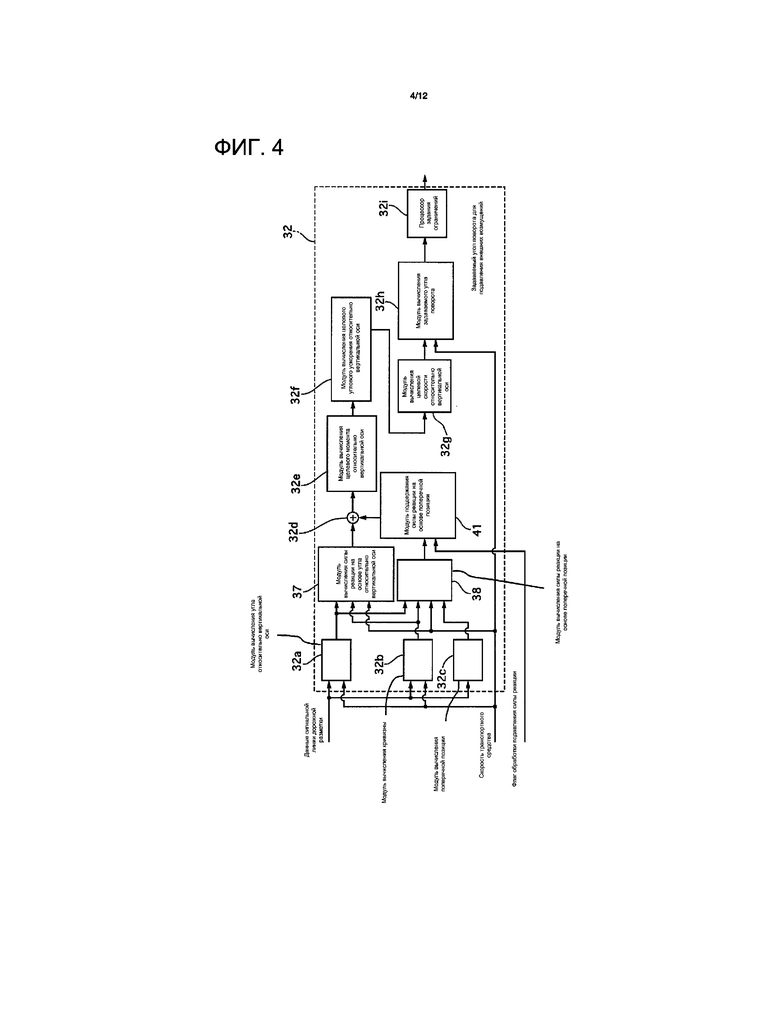
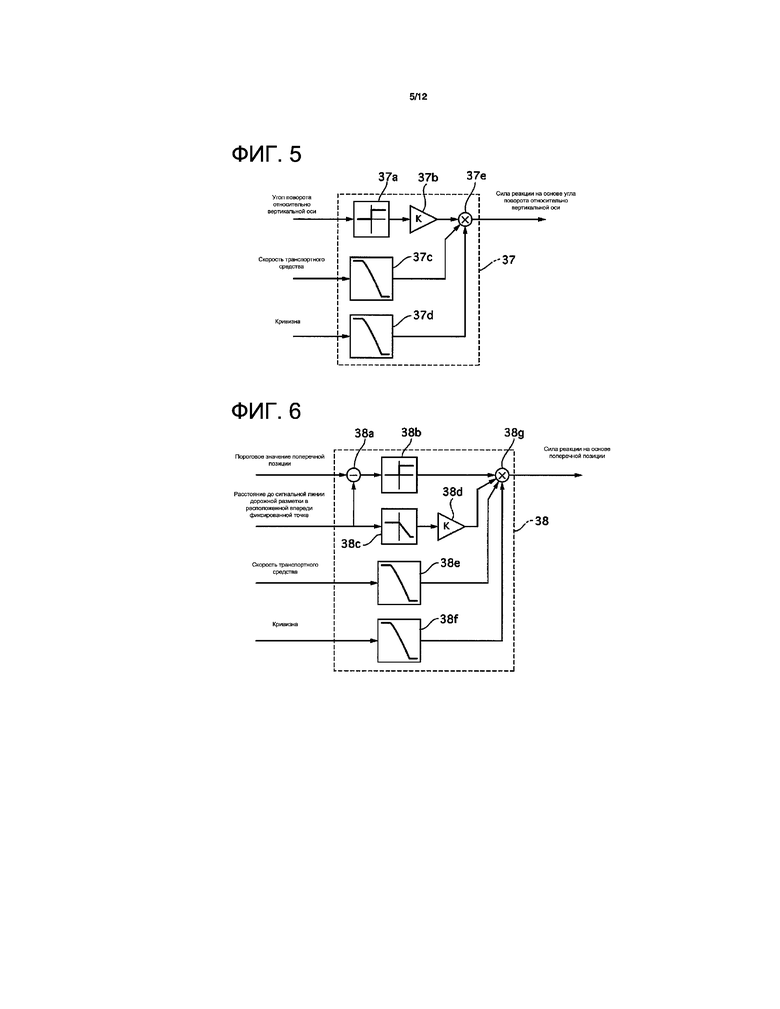
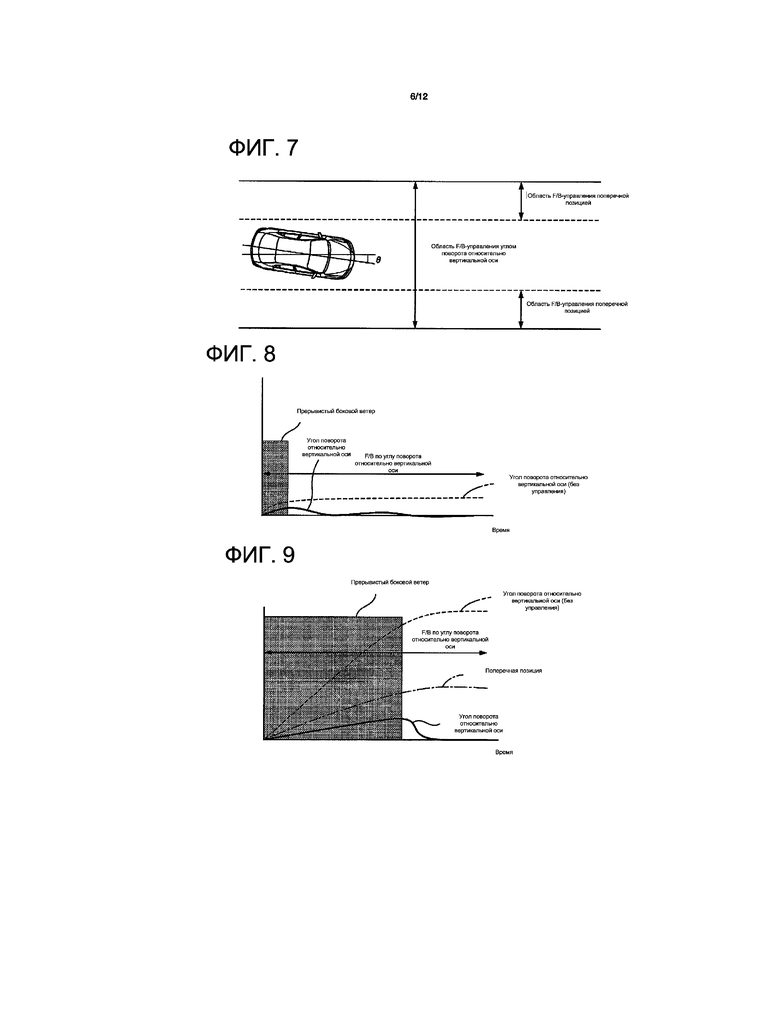
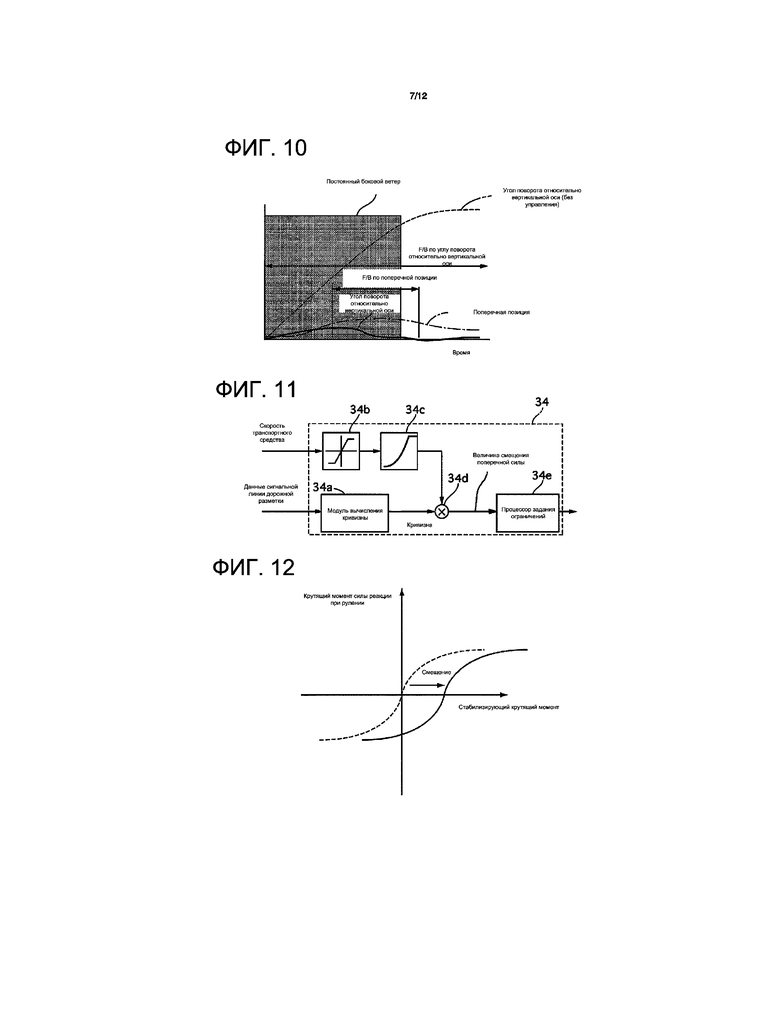
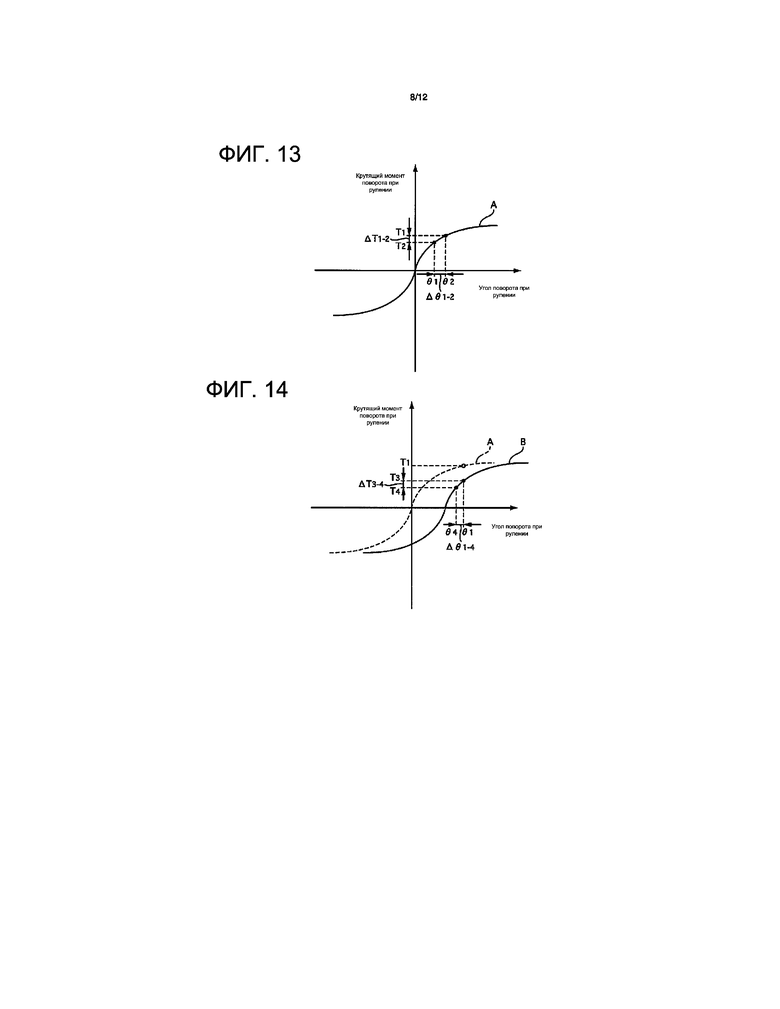
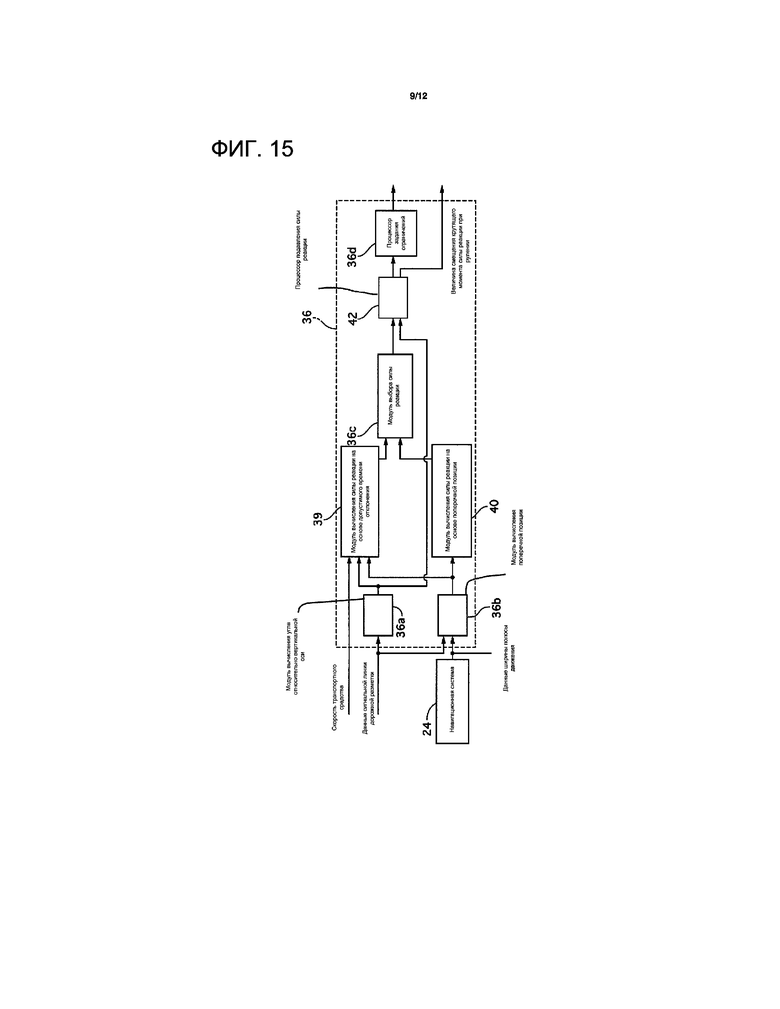
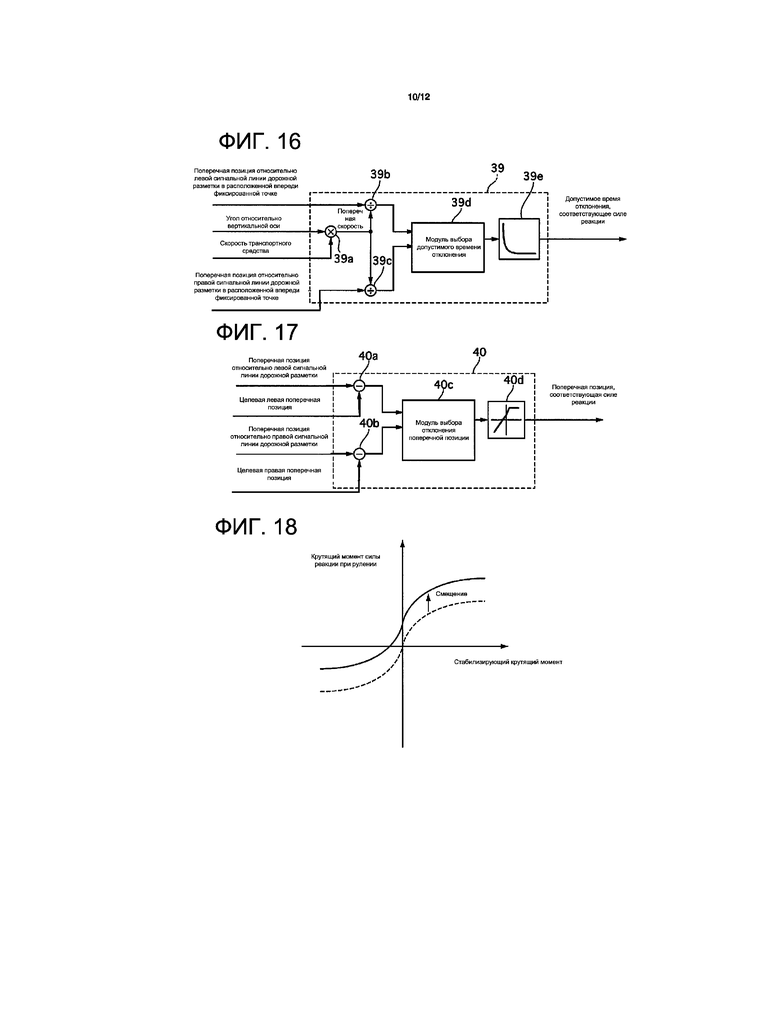
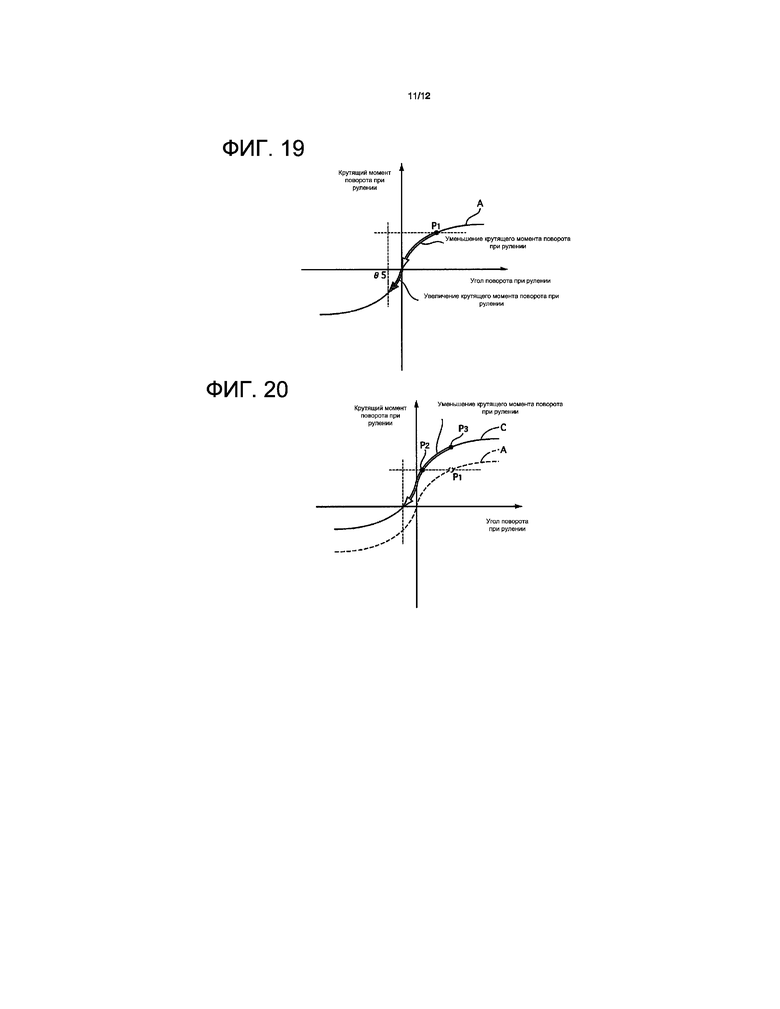
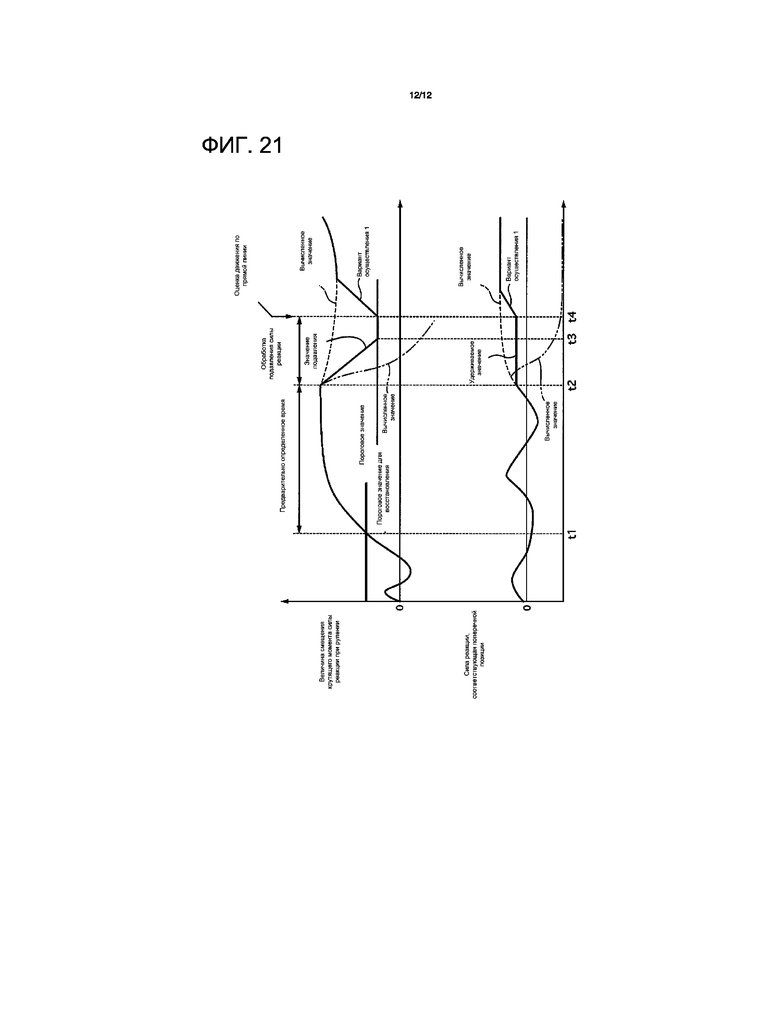
Изобретение относится к устройству управления рулением. Устройство управления рулением содержит актуатор силы реакции при рулении, средство вычисления величины управления силой реакции, средство управления силой реакции, поворотный актуатор, средство вычисления величины управления, средство управления поворотом, средство обработки подавления силы реакции и средство поддержания величины поворачивания. Актуатор силы реакции используется для приложения силы реакции к модулю руления. Средство управления силой реакции управляет актуатором силы реакции на основе величины управления силой реакции. Поворотный актуатор прикладывает крутящий момент поворота к поворотному узлу, механически отделенному от модуля руления. Средство управления поворотом управляет поворотным актуатором. Средство обработки подавления силы реакции вычисляет величину управления силой реакции при рулении для обработки подавления силы реакции. Средство поддержания величины поворачивания поддерживает величину управления при повороте, равной значению, возникающему в начальный момент времени обработки подавления силы реакции, когда начата обработка подавления силы реакции. Достигается повышение безопасности управления транспортным средством. 8 з.п. ф-лы, 21 ил.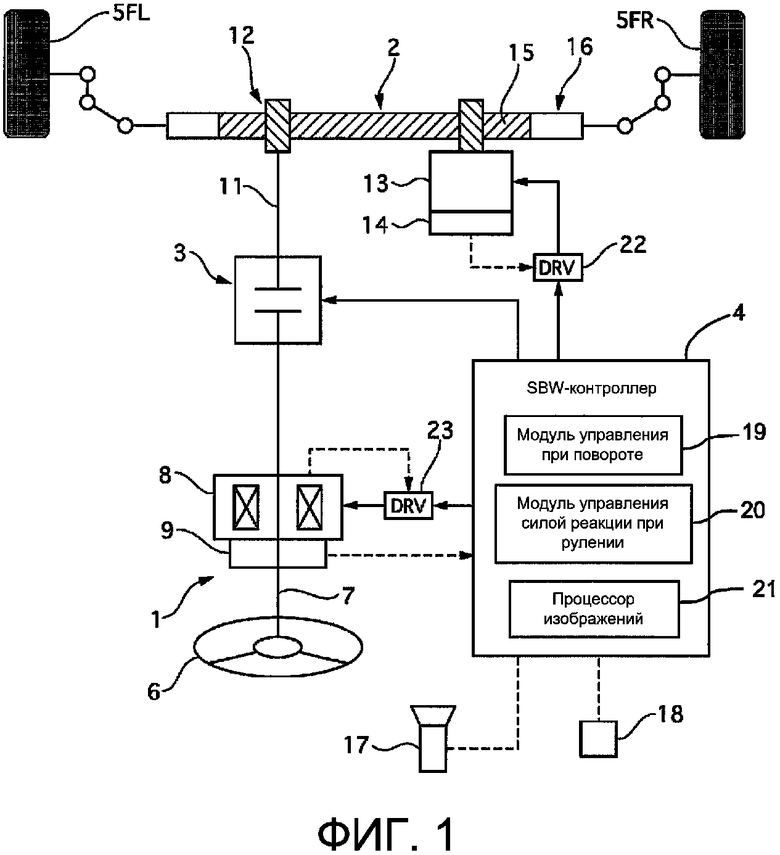
1. Устройство управления рулением, отличающееся тем, что оно содержит:
- актуатор силы реакции при рулении для приложения силы реакции при рулении к модулю руления;
- средство вычисления величины управления силой реакции при рулении для вычисления величины управления силой реакции при рулении, при которой сила реакции при рулении увеличивается в направлении, в котором поперечная позиция рассматриваемого транспортного средства отдаляется от разделительной линии проезжаемого пути в соразмерной близости к разделительной линии проезжаемого пути;
- средство управления силой реакции при рулении для управления актуатором силы реакции при рулении на основе величины управления силой реакции при рулении;
- поворотный актуатор для приложения крутящего момента поворота к поворотному узлу, механически отделенному от модуля руления;
- средство вычисления величины управления при повороте для вычисления величины управления при повороте, при которой величина поворачивания увеличивается в направлении, в котором поперечная позиция рассматриваемого транспортного средства отдаляется от разделительной линии проезжаемого пути в соразмерной близости к разделительной линии проезжаемого пути;
- средство управления поворотом для управления поворотным актуатором на основе величины управления при повороте;
- средство обработки подавления силы реакции для вычисления величины управления силой реакции при рулении для обработки подавления силы реакции для уменьшения величины управления силой реакции при рулении, когда состояние, в котором величина управления силой реакции при рулении имеет предварительно определенное пороговое значение или выше, длится в течение предварительно определенной продолжительности, и для обработки подавления силы реакции для управления актуатором силы реакции при рулении на основе величины управления силой реакции при рулении для обработки подавления силы реакции вместо величины управления силой реакции при рулении; и
- средство поддержания величины поворачивания для поддержания величины управления при повороте, равной значению, возникающему в начальный момент времени обработки подавления силы реакции, когда начата обработка подавления силы реакции.
2. Устройство управления рулением по п. 1, отличающееся тем, что:
- средство обработки подавления силы реакции поддерживает величину управления силой реакции при рулении обработки подавления силы реакции, равной предварительно определенному пороговому значению для восстановления, когда величина управления силой реакции при рулении для обработки силы реакции уменьшена до порогового значения для восстановления.
3. Устройство управления рулением по п. 2, отличающееся тем, что оно снабжено средством оценки движения по прямой для оценки состояния движения по прямой транспортного средства, при этом средство обработки подавления силы реакции отменяет обработку подавления силы реакции, когда движение оценивается в качестве движения по прямой, в то время как величина управления силой реакции при рулении для обработки силы реакции поддерживается, и восстанавливает величину управления силой реакции при рулении для обработки силы реакции до величины управления силой реакции при рулении.
4. Устройство управления рулением по любому из пп. 1-3, отличающееся тем, что:
- средство обработки подавления силы реакции передает величину управления силой реакции при рулении в актуатор силы реакции при рулении, когда величина управления силой реакции при рулении становится меньше величины управления силой реакции при рулении для обработки силы реакции во время обработки подавления силы реакции.
5. Устройство управления рулением по любому из пп. 1-3, отличающееся тем, что:
- когда обработка подавления силы реакции отменена, средство поддержания величины поворачивания восстанавливает поддерживаемую величину управления при повороте до величины управления при повороте, вычисленной средством вычисления величины управления при повороте.
6. Устройство управления рулением по любому из пп. 1-3, отличающееся тем, что:
- средство поддержания величины поворачивания передает величину управления при повороте в поворотный актуатор, когда величина управления при повороте, вычисленная средством вычисления величины управления при повороте, становится меньше значения, возникающего в момент времени начала обработки подавления силы реакции после того, как начата обработка подавления силы реакции.
7. Устройство управления рулением по п. 4, отличающееся тем, что:
- когда обработка подавления силы реакции отменена, средство поддержания величины поворачивания восстанавливает поддерживаемую величину управления при повороте до величины управления при повороте, вычисленной средством вычисления величины управления при повороте.
8. Устройство управления рулением по п. 4, отличающееся тем, что:
- средство поддержания величины поворачивания передает величину управления при повороте в поворотный актуатор, когда величина управления при повороте, вычисленная средством вычисления величины управления при повороте, становится меньше значения, возникающего в момент времени начала обработки подавления силы реакции после того, как начата обработка подавления силы реакции.
9. Устройство управления рулением по п. 5, отличающееся тем, что:
- средство поддержания величины поворачивания передает величину управления при повороте в поворотный актуатор, когда величина управления при повороте, вычисленная средством вычисления величины управления при повороте, становится меньше значения, возникающего в момент времени начала обработки подавления силы реакции после того, как начата обработка подавления силы реакции.
| JP 2010030504 A, 12.02.2010 | |||
| JP 2009208602 A, 17.09.2009 | |||
| RU 2012103178 A, 10.08.2013. |

