ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Настоящее изобретение относится к технологии помощи при вождении транспортного средства для такой помощи водителю в вождении, чтобы не допускать приближения транспортного средства к препятствию, расположенному сзади и сбоку от транспортного средства.
УРОВЕНЬ ТЕХНИКИ
[0002] Например, технология, раскрытая в патентном документе 1, известна как устройство помощи при вождении традиционного транспортного средства. В технологии, раскрытой в патентном документе 1, когда обнаруживается намерение водителя сменить полосу движения, и препятствие присутствует сзади и сбоку от транспортного средства, приближение к препятствию сообщается водителю, чтобы не допускать приближения к препятствию. В это время, в технологии, раскрытой в патентном документе 1, обнаруживается операция водителя с указателем поворота, обнаруживается позиция транспортного средства в пределах полосы движения в поперечном направлении (самая правая позиция на полосе движения или самая левая позиция на полосе движения), и обнаруживается намерение водителя сменить полосу движения, когда указанное направление указателя направления совпадает с позицией транспортного средства в пределах полосы движения в поперечном направлении.
ДОКУМЕНТЫ ПРЕДШЕСТВУЮЩЕГО УРОВНЯ ТЕХНИКИ
ПАТЕНТНЫЕ ДОКУМЕНТЫ
[0003] Патентный документ 1. Публикация заявки на патент (Япония) номер 2009-184554A
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
ЗАДАЧА ДЛЯ РЕШЕНИЯ
[0004] Тем не менее, например, поскольку водители имеют индивидуальные предпочтения или привычки касательно позиции движения в пределах полосы движения, нельзя сказать, что водитель обязательно движется в центре полосы движения, когда водитель не имеет намерения сменить полосу движения. Соответственно, обнаружение намерения сменить полосу движения в зависимости от операции указателя направления и позиции движения в пределах полосы движения может иметь низкую точность обнаружения. Иными словами, даже когда водитель не имеет намерения приближения к препятствию, может вмешиваться управление для недопущения приближения к препятствию, что может вызывать некомфортное ощущение у водителя.
Настоящее изобретение осуществлено с учетом вышеуказанных обстоятельств, и его цель заключается в том, чтобы предоставлять управление помощью, допускающее дополнительное подавление некомфортного ощущения, возникающего у водителя при реализации при вождении для препятствия сзади и сбоку от транспортного средства.
РЕШЕНИЕ ЗАДАЧИ
[0005] Чтобы достигать вышеуказанной цели, согласно аспекту настоящего изобретения, обнаруживается форма дороги впереди транспортного средства, и затем определяется то, имеет ли водитель намерение сменить полосу движения, на основе обнаруженной формы дороги и величины руления в зависимости от руления водителем. Дополнительно, в настоящем изобретении, обнаруживается препятствие сзади и сбоку от транспортного средства. Затем, в настоящем изобретении, определяется то, что управление недопущением приближения для недопущения приближения транспортного средства к препятствию должно начинаться, когда определяется то, что водитель имеет намерение сменить полосу движения, и обнаруживается препятствие. Когда определяется то, что управление должно начинаться, выполняется управление недопущением приближения для помощи в недопущении приближения транспортного средства к препятствию. В настоящем изобретении, определяется точность обнаружения формы дороги впереди транспортного средства. Определение начала управления подавляется, когда точность обнаружения является низкой.
ПРЕИМУЩЕСТВА ИЗОБРЕТЕНИЯ
[0006] Согласно аспекту настоящего изобретения, начало управления недопущением приближения подавляется, когда точность обнаружения формы дороги является низкой. Соответственно, выполнение необязательного управления недопущением приближения (вмешательство посредством необязательного управления недопущением приближения) уменьшается, когда точность обнаружения при обнаружения формы дороги является низкой. Как результат, можно дополнительно подавлять некомфортное ощущение, возникающее у водителя при реализации при вождении для препятствия сзади и сбоку от транспортного средства.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0007] Фиг. 1 является схемой, иллюстрирующей схематичную конфигурацию устройства согласно первому варианту осуществления настоящего изобретения;
Фиг. 2 является схемой, иллюстрирующей другую схематичную конфигурацию устройства согласно первому варианту осуществления настоящего изобретения;
Фиг. 3 является концептуальной схемой, иллюстрирующей область обнаружения препятствия сзади и сбоку от транспортного средства и других;
Фиг. 4 является схемой, иллюстрирующей другую схематичную конфигурацию устройства согласно варианту осуществления настоящего изобретения;
Фиг. 5 является блок-схемой последовательности операций способа, иллюстрирующей пример процедуры обработки в модуле управления в первом варианте осуществления;
Фиг. 6 является концептуальной схемой, иллюстрирующей взаимосвязь между транспортным средством и препятствием;
Фиг. 7 является блок-схемой последовательности операций способа, иллюстрирующей пример процедуры обработки в модуле управления во втором варианте осуществления;
Фиг. 8 является блок-схемой последовательности операций способа, иллюстрирующей пример процедуры обработки в модуле управления в третьем варианте осуществления; и
Фиг. 9 является концептуальной схемой, иллюстрирующей взаимосвязь между транспортным средством и препятствием.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[0008] Далее описаны варианты осуществления настоящего изобретения со ссылками на чертежи.
ПЕРВЫЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ
В этом варианте осуществления описывается пример, в котором устройство помощи при вождении транспортного средства монтируется на заднеприводном транспортном средстве. Помимо этого, переднеприводное транспортное средство или транспортное средство с приводом на четыре колеса может применяться в качестве целевого транспортного средства. Может применяться транспортное EV-средство или гибридное транспортное средство.
[0009] КОНФИГУРАЦИЯ
Фиг. 1 является схемой, иллюстрирующей схематичную конфигурацию устройства согласно этому варианту осуществления. Ссылка с номером 1 на фиг. 1 представляет педаль тормоза. Педаль 1 тормоза соединяется с главным цилиндром 3 через усилитель 2. Кроме того, ссылка с номером 4 на фиг. 1 обозначает бачок.
Главный цилиндр 3 соединяется с колесными тормозными цилиндрами 6FL-6RR через гидравлическую схему 30 (схему давления жидкости). Соответственно, в состоянии, в котором не выполняется управление торможением, давление тормозной жидкости повышается посредством главного цилиндра 3 в зависимости от величины нажатия педали 1 тормоза, нажатой водителем. Повышенное давление тормозной жидкости подается в колесные тормозные цилиндры 6FL-6RR колес 5FL-5RR через гидравлическую схему 30.
[0010] Модуль 7 управления давлением тормозной жидкости управляет актуатором в гидравлической схеме 30 и по отдельности управляет давлениями тормозной жидкости к колесам. Давления тормозной жидкости к колесам управляются до значения, соответствующего значению команды управления из модуля 8 управления тормозной/движущей силой. В качестве актуатора используется пропорциональный электромагнитный клапан, допускающий управление давлениями текучей среды колесного тормозного цилиндра до произвольного давления тормозной жидкости.
[0011] Здесь, модуль 7 управления давлением тормозной жидкости и гидравлическая схема 30 могут использовать модуль управления давлением тормозной жидкости, который используется, например, в антиблокировочной тормозной системе (ABS), системе управления тягой (TCS) или системе динамического управления транспортного средства (VDC). Только модуль 7 управления давлением тормозной жидкости может быть выполнен с возможностью управлять давлениями тормозной жидкости колесных тормозных цилиндров 6FL-6RR. Когда значение команды управления давлением тормозной жидкости вводится из модуля 8 управления тормозной/движущей силой, который описывается ниже, давления тормозной жидкости управляются в соответствии со значением команды управления давлением тормозной жидкости.
[0012] Транспортное средство включает в себя модуль 12 управления крутящим моментом на валу привода и модуль 25 получения форм полос движения.
Модуль 12 управления крутящим моментом на валу привода управляет крутящим моментом на валу привода для задних колес 5RL и 5RR в качестве ведущих колес. Это управление реализуется посредством управления рабочим режимом двигателя 9, выбранным передаточным отношением трансмиссии для автоматической трансмиссии 10 и степенью открытия дросселя для дроссельного клапана 11. Иными словами, модуль 12 управления крутящим моментом на валу привода управляет впрыскиваемым объемом топлива или временем зажигания. Одновременно, модуль 12 управления крутящим моментом на валу привода управляет степенью открытия дросселя. Соответственно, модуль 12 управления крутящим моментом на валу привода управляет рабочим режимом двигателя 9.
[0013] Модуль 12 управления крутящим моментом на валу привода отдельно может управлять крутящим моментом на валу привода задних колес 5RL и 5RR. Здесь, когда значение команды управления крутящим моментом на валу привода вводится из модуля 8 управления тормозной/движущей силой, крутящий момент ведущих колес управляется в соответствии со значением команды управления крутящим моментом на валу привода.
Транспортное средство также включает в себя модуль 26 формирования изображений, имеющий функцию обработки изображений. Модуль 26 формирования изображений включает в себя камеру и обрабатывает и выводит изображение, захваченное с помощью камеры. Камера включает в себя камеру на основе CCD (прибора с зарядовой связью) и т.д., расположенную с возможностью фотографировать изображение сзади и сбоку от транспортного средства.
[0014] При этом термин "сзади и сбоку от транспортного средства" в этом подробном описании означает сзади от транспортного средства MM, в том числе и сбоку от транспортного средства. На фиг. 1, задняя камера, расположенная в задней части транспортного средства, иллюстрируется в качестве камеры модуля 26 формирования изображений. Камера модуля 26 формирования изображений может быть одной из боковых камер, которые, в общем, располагаются под левым и правым зеркалами, как проиллюстрировано на фиг. 2.
[0015] Модуль 26 формирования изображений обнаруживает разделительную линию полосы движения, к примеру, полосу дорожной разметки (разделительную линию), из захваченного изображения и обнаруживает полосу движения на основе обнаруженной полосы дорожной разметки. Модуль 26 формирования изображений обнаруживает поперечное смещение X транспортного средства MM относительно полосы движения на основе обнаруженной полосы движения и выводит обнаруженное поперечное смещение X в модуль 8 управления тормозной/движущей силой, который описывается ниже. Затем, как описано ниже, модуль 8 управления тормозной/движущей силой вычисляет угол φ относительно вертикальной оси на основе обнаруженного поперечного смещения X. Соответственно, на угол φ относительно вертикальной оси, вычисленный посредством модуля 8 управления тормозной/движущей силой, оказывает значительное влияние на точность S обнаружения полосы дорожной разметки посредством модуля 26 формирования изображений.
[0016] Здесь, навигационное устройство 31 монтируется на транспортном средстве. Навигационное устройство 31 включает в себя картографические данные, в которых сохраняется картографическая информация. Навигационное устройство 31 выводит информацию пути, заданную на основе ввода пункта назначения водителем, вместе с информацией дороги и другой картографической информацией в модуль 8 управления тормозной/движущей силой.
Устройство согласно этому варианту осуществления обнаруживает кривизну β дороги посредством использования навигационного устройства 31. Способ определения кривизны β дороги описывается ниже.
[0017] Модуль 26 формирования изображений определяет присутствие препятствия SM, которое движется сзади и сбоку от транспортного средства, на основе изображения сзади и сбоку от транспортного средства, захваченного с помощью камеры. Модуль 26 формирования изображений предпочтительно может обнаруживать относительную поперечную позицию POSXobst, относительную продольную позицию DISTobst, относительную продольную скорость dDISTobst между транспортным средством MM и препятствием SM на каждой из левой и правой сторон по отдельности (см. фиг. 3). Относительная поперечная позиция POSXobst представляет позицию препятствия в направлении ширины полосы движения относительно транспортного средства MM. Относительная продольная позиция DISTobst представляет позицию препятствия в направлении, перпендикулярном направлению ширины полосы движения (позицию препятствия в направлении, параллельном полосе движения) относительно транспортного средства MM. Относительная продольная скорость dDISTobst представляет относительную скорость в направлении движения транспортного средства MM. На фиг. 3, боковая камера иллюстрируется в качестве камеры.
[0018] Затем, это транспортное средство включает в себя датчик 17 давления главного цилиндра, датчик 18 степени открытия акселератора, датчик 19 угла поворота при рулении, переключатель 20 указателя направления (поворота) и датчики 22FL-22RR скорости вращения колес. Эти датчики выводят обнаруженные сигналы обнаружения в модуль 8 управления тормозной/движущей силой.
Датчик 17 давления главного цилиндра обнаруживает выходное давление главного цилиндра 3, т.е. давление Pm жидкости в главном цилиндре. Датчик 18 степени открытия акселератора обнаруживает величину нажатия педали акселератора, т.е. степень θt открытия акселератора. Датчик 19 угла поворота при рулении обнаруживает угол δ поворота при рулении (угол отклонения руля при рулении) руля 21. Переключатель 20 указателя направления обнаруживает операцию указания направления в отношении указателя направления. Датчики 22FL-22RR скорости вращения колес обнаруживают скорости вращения колес 5FL к 5RR, т.е. скорости Vwi вращения колес (i=fl, fr, rl, rr).
[0019] Помимо этого, в вышеприведенном описании, проиллюстрирована конфигурация обнаружения присутствия препятствия SM сзади и сбоку от транспортного средства либо состояния транспортного средства MM относительно полосы движения (угла относительно вертикальной оси или поперечной позиции) на основе изображения, захваченного с помощью камеры модуля 26 формирования изображений. Тем не менее, обнаружение препятствия SM не ограничивается этим примером. Например, как проиллюстрировано на фиг. 4, может использоваться конфигурация с включением в конструкцию радаров 24L/24R диапазона миллиметровых волн для обнаружения препятствия SM сзади и сбоку от транспортного средства и обнаружения препятствия SM с помощью радаров 24L/24R диапазона миллиметровых волн. Может использоваться конфигурация с включением передней камеры 13 для захвата изображения перед транспортным средством MM, обнаружением полосы движения на основе изображения, захваченного с помощью передней камеры 13, и обнаружением состояния (поперечного смещения X) относительно полосы движения транспортного средства MM.
[0020] Модуль 25 получения форм полос движения получает форму полосы движения (такие формы полосы движения, как ширина и кривизна β полосы движения) в предварительно установленной области впереди, заданной перед транспортным средством MM, т.е. в пределах предварительно установленного расстояния впереди, в качестве информации формы дороги и выводит полученную форму полосы движения в модуль 8 управления тормозной/движущей силой. В частности, модуль 25 получения форм полос движения обнаруживает форму полосы движения в пределах предварительно установленного расстояния впереди в направлении движения от текущей позиции транспортного средства MM, например, на основе картографической информации навигационного устройства 31 и выводит обнаруженную форму полосы движения в модуль 8 управления тормозной/движущей силой. Здесь, модуль 25 получения форм полос движения может включать в себя переднюю камеру 13 для захвата изображения перед транспортным средством MM, может обнаруживать разделительную линию полосы движения, к примеру, полосу дорожной разметки (разделительную линию) из изображения, захваченного с помощью передней камеры 13, и может обнаруживать форму полосы движения на основе обнаруженной разделительной линии полосы движения. Модуль 25 получения форм полос движения может обнаруживать форму полосы движения на основе данных, передаваемых из дорожной инфраструктуры (к примеру, VICS (зарегистрированный товарный знак)) за пределами транспортного средства.
[0021] Здесь, модуль 8 управления тормозной/движущей силой и модуль 25 получения форм полос движения включают в себя контроллер, имеющий микрокомпьютер и его периферийные схемы. Модуль 25 получения форм полос движения может быть выполнен с возможностью быть независимым от модуля 8 управления тормозной/движущей силой, но в нижеприведенном описании, модуль 25 получения форм полос движения сконфигурирован как часть процесса (программы), который выполняется посредством модуля 8 управления тормозной/движущей силой.
[0022] Фиг. 5 является блок-схемой последовательности операций способа, иллюстрирующей процедуру обработки вычисления управления помощью при вождении, которое выполняется посредством модуля 8 управления тормозной/движущей силой.
Процедура обработки вычисления управления помощью при вождении выполняется посредством прерывания таймера каждое предварительно установленное время ΔT дискретизации. Процедура обработки вычисления управления помощью при вождении выполняется посредством прерывания таймера, например, каждые 10 мс. Помимо этого, процедура обработки, проиллюстрированная на фиг. 5, не содержит процесс связи, но информация, полученная через процесс вычисления, часто сохраняется в устройстве хранения данных, чтобы обновлять информацию в устройстве хранения данных, и необходимая информация часто считывается из устройства хранения данных.
[0023] Ниже описывается процедура обработки вычисления управления помощью при вождении со ссылкой на фиг. 5.
Во-первых, на этапе S10, модуль 8 управления тормозной/движущей силой считывает различные данные из датчиков, контроллеров или модулей управления. В частности, модуль 8 управления тормозной/движущей силой считывает скорости Vwi вращения колес, угол поворота при рулении 8, давление Pm жидкости в главном цилиндре и сигнал переключения указателя направления, которые обнаруживаются посредством датчиков, и вычисляет скорость V транспортного средства MM.
[0024] Скорость V транспортного средства вычисляется с использованием выражения (1), например, на основе считанных скоростей Vwi вращения колес.
В случае переднего привода:
V=(Vwrl+Vwrr)/2
В случае заднего привода:
V=(Vwfl+Vwfr)/2 (1)
Здесь, Vwfl и Vwfr представляют скорости вращения колес для левого и правого передних колес, а Vwrl и Vwrr представляют скорости вращения колес для левого и правого задних колес, соответственно. Иными словами, в выражении (1), скорость V транспортного средства вычисляется как среднее значение скоростей вращения колес ведомых колес. В этом варианте осуществления, поскольку транспортное средство является заднеприводным транспортным средством, скорость V транспортного средства вычисляется с использованием второго выражения, т.е. скоростей вращения колес для передних колес.
Когда работает механизм управления ABS (антиблокировочной тормозной системы) и т.п., оцененная скорость транспортного средства, оцененная в механизме ABS-управления, может быть использована в качестве скорости V транспортного средства.
[0025] На этапе S20, выполняется процесс обнаружения препятствия SM. Иными словами, на этапе S20, модуль 8 управления тормозной/движущей силой обнаруживает присутствие "Lobst" и "Robst" препятствия SM (препятствия SM сзади и сбоку от транспортного средства) в соответствующих областях K-AREA обнаружения препятствия, заданных с правой стороны и с левой стороны от транспортного средства MM. В частности, при определении присутствия препятствия SM, когда препятствия SM присутствует в предварительно установленном данном диапазоне относительных позиций (в дальнейшем в этом документе, в области K-AREA обнаружения препятствия), заданном для транспортного средства, определяется то, что присутствие SM присутствует.
[0026] Иными словами, модуль 8 управления тормозной/движущей силой определяет то, что препятствие SM присутствует, когда изображение препятствия SM присутствует в диапазоне, в изображении, захваченном с помощью камеры модуля 26 формирования изображений, соответствующем областям K-AREA обнаружения препятствия, заданным сзади и сбоку от транспортного средства. Альтернативно, модуль 8 управления тормозной/движущей силой может обнаруживать позицию препятствия SM относительно транспортного средства MM посредством использования изображения, захваченного с помощью камеры, и может определять то, что препятствие SM присутствует, когда обнаруженная относительная позиция находится в пределах областей K-AREA обнаружения препятствия. Когда радары 24L/24R диапазона миллиметровых волн (см. фиг. 4) предоставляются, модуль 8 управления тормозной/движущей силой может определять то, что препятствие SM присутствует, когда позиция препятствия SM, которая обнаруживается посредством радара, относительно транспортного средства MM находится в пределах областей K-AREA обнаружения препятствия. Когда позиция препятствия SM относительно транспортного средства MM может быть обнаружена, как описано выше, модуль 8 управления тормозной/движущей силой может вычислять время до тех пор, пока препятствие SM не достигнет области K-AREA обнаружения препятствия, на основе варьирования в относительной позиции препятствия SM, может прогнозировать, что препятствие SM входит в область K-AREA обнаружения препятствия, когда вычисленное время меньше предварительно установленного времени Tobstdetect, произвольно предварительно заданного, и может определять то, что препятствие SM присутствует.
[0027] Затем, на этапе S30, модуль 8 управления тормозной/движущей силой получает картографическую информацию предварительно установленной области F-AREA впереди, которая является предварительно определенной областью, заданной перед транспортным средством MM, в отношении картографической информации навигационного устройства 31. Затем, модуль 8 управления тормозной/движущей силой получает кривизну β (форму полосы движения) полосы движения транспортного средства MM в качестве информации формы дороги на основе полученной картографической информации.
[0028] Например, модуль 8 управления тормозной/движущей силой получает узлы в предварительно установленной области F-AREA впереди из текущей позиции транспортного средства MM на основе картографической информации, сохраненной в навигационном устройстве 31, вычисляет аппроксимирующую кривую, соединяющую полученные узлы, и получает кривизну β вычисленной аппроксимирующей кривой в качестве кривизны β полосы движения. Текущая позиция транспортного средства MM может быть обнаружена с использованием приемного GPS-устройства в навигационном устройстве 31 и т.п.
[0029] Способ получения кривизны β полосы движения не ограничивается вышеуказанным способом. Например, когда кривизна β, соответствующая дороге, включается в качестве информации дороги в картографическую информацию, модуль 8 управления тормозной/движущей силой может получать кривизну β полосы движения посредством считывания кривизны β, сохраненной в качестве информации дороги. Альтернативно, как проиллюстрировано на фиг. 6, может предоставляться передняя камера 13 для захвата изображения перед транспортным средством MM, может быть обработано изображение, захваченное с помощью передней камеры 13, и возможные варианты точек на разделительной линии могут быть извлечены посредством обнаружения краев. В этом случае, сегмент линии, проходящий через извлеченные возможные варианты точек, может быть обнаружен в качестве формы разделительной линии, и кривизна β полосы движения может быть получена из обнаруженной формы разделительной линии.
[0030] Модуль 8 управления тормозной/движущей силой может получать информацию относительно формы дороги перед транспортным средством MM с помощью связи между транспортным средством и дорожной инфраструктурой с инфраструктурой (дорожной инфраструктурой), такой как VICS (зарегистрированный товарный знак), либо связи между транспортными средствами с другим транспортным средством, движущимся впереди него, вместо получения кривизны β на основе картографической информации навигационного устройства 31. Иными словами, например, когда информация узлов может быть принята из инфраструктуры или другого транспортного средства, узлы в предварительно установленной области F-AREA впереди, заданной перед транспортным средством MM на основе текущей позиции транспортного средства MM, получаются на основе принимаемых узлов, кривая, соединяющая узлы, вычисляется, и кривизна β вычисленной кривой получается в качестве кривизны β полосы движения. Когда информация относительно кривизны β дороги может быть принята из инфраструктуры или другого транспортного средства, принимаемая кривизна может быть получена в качестве кривизны β полосы движения.
[0031] На этапе S30, угол φ относительно вертикальной оси вычисляется из поперечного смещения X на основе следующего выражения.
φ=tan-1(V/dX′(=dY/dX)) (2)
Здесь, dX представляет варьирование поперечного смещения X в единицу времени, dY представляет варьирование в направлении движения (стороны вдоль полосы движения) в единицу времени, и dX′ представляет дифференциальное значение варьирования dX. Здесь, символ " ′ " представляет дифференциал первого порядка.
[0032] Затем, на этапе S40, прогнозный угол σpath поворота при рулении вычисляется с использованием кривизны β полосы движения, полученной в качестве информации кривой в области впереди. Прогнозный угол σpath поворота при рулении является углом поворота при рулении, необходимым для поддержания посредством транспортного средства MM пути движения, т.е. углом поворота при рулении, необходимым для обеспечения принудительного движения транспортного средства MM по полосе движения. Прогнозный угол σpath поворота при рулении вычисляется посредством умножения кривизны β на усиление WBg, предварительно определенное в зависимости от габаритов (колесной базы) транспортного средства.
[0033] Затем, на этапе S50, угол отклонения σ, который является увеличением угла поворота при рулении при смене полосы движения водителем транспортного средства MM, определяется на основе следующего выражения. Угол σdriverhosei отклонения угла поворота при рулении является отклонением между текущим углом поворота при рулении σ и прогнозным углом σpath поворота при рулении, который является углом поворота при рулении для обеспечения принудительного движения транспортного средства MM по полосе движения. Иными словами, угол σdriverhosei отклонения является величиной руления, которая является индексом для определения того, имеет ли водитель транспортного средства MM намерение сменить полосу движения.
σdriverhosei=σ-σpath (3)
[0034] Затем, на этапе S60, задается начальное значение предварительно установленного угла σth отклонения, причем предварительно установленный угол σth отклонения используется для того, чтобы определять то, должно ли начинаться управление недопущением приближения для подавления приближения транспортного средства MM к препятствию SM.
Предварительно установленный угол σth отклонения является пороговым значением для обнаружения намерения водителя сменить полосу движения.
Предварительно установленный угол σth отклонения сохраняется в качестве карты, соответствующей скорости транспортного средства, таким образом, что чем выше становится скорость транспортного средства, тем меньше становится его значение, и получается и задается посредством извлечения его из карты на основе скорости транспортного средства.
[0035] Предварительно установленный угол σth отклонения может задаваться таким образом, что чем ближе транспортное средство MM к полосе дорожной разметки (чем меньше поперечное смещение X), тем меньше его значение. В этом случае, например, предварительно установленный угол σth отклонения может быть получен посредством коррекции предварительно установленного угла σth отклонения, определенного посредством извлечения его из карты, посредством умножения его на коэффициент 1 или меньше, который становится меньшим по мере того, как транспортное средство MM становится ближе к полосе дорожной разметки.
Альтернативно, предварительно установленный угол σth отклонения может задаваться таким образом, что чем ближе транспортное средство MM к препятствию SM, тем меньше его значение. В этом случае, например, предварительно установленный угол σth отклонения может быть получен посредством коррекции предварительно установленного угла σth отклонения, определенного посредством извлечения его из карты, посредством умножения его на коэффициент 1 или меньше, который становится меньшим по мере того, как транспортное средство MM становится ближе к препятствию SM.
[0036] На этапе S70, обнаруживается расстояние до изгиба, причем расстояние до изгиба представляет собой расстояние от текущей позиции транспортного средства MM до начальной позиции искривленной дороги, имеющейся впереди в направлении движения транспортного средства MM. В частности, на этапе S70, текущая позиция транспортного средства MM обнаруживается на основе GPS-информации, и расстояние до изгиба обнаруживается на основе обнаруженной текущей позиции и картографической информации, сохраненной в навигационном устройстве 31. Расстояние до изгиба задается как расстояние DISTtocurve[m] вдоль полосы движения от начальной точки (в которой абсолютное значение кривизны β равно или превышает предварительно определенное значение) кривой впереди в направлении движения до точки, в которой транспортное средство находится на карте.
[0037] На этапе S80, выполняется процесс задания предварительно установленного расстояния до изгиба.
В частности, предварительно установленное расстояние до изгиба задается таким образом, что чем ниже становится точность Sx расстояния до изгиба, которое является расстоянием от текущей позиции транспортного средства MM до кривой, тем больше становится его значение. Точность Sx расстояния до изгиба определяется, например, в зависимости от точности Sx обнаружения местоположения транспортного средства MM.
[0038] Касательно позиции транспортного средства MM, позиция транспортного средства MM обнаруживается посредством приема радиоволн из нескольких GPS-спутников и вычисления расстояний от GPS-спутников, из которых принимается радиоволна. Соответственно, чем больше становится число GPS-спутников (число полученных GPS-спутников), из которых принимается радиоволна, тем выше становится точность Sx обнаружения (точность обнаружения местоположения) позиции транспортного средства MM. Соответственно, например, точность Sx расстояния до изгиба задается низкой, когда число фрагментов информации, полученных из GPS-спутников, равно или меньше трех, точность Sx расстояния до изгиба задается средней, когда число фрагментов информации, полученных из GPS-спутников, равно четырем или пяти, и точность Sx расстояния до изгиба задается высокой, когда число фрагментов информации, полученных из GPS-спутников, равно или больше шести. GPS-спутники, позиции которых находятся менее чем на предварительно определенном расстоянии, подсчитываются как один. Когда состояние, в котором точность Sx является высокой, изменяется на любое состояние, в котором точность является средней или низкой, может быть определено, что задание точности Sx должно изменяться после того, как проезжаемое расстояние после изменения состояния равно или превышает предварительно определенное расстояние. В это время, напротив, когда точность Sx изменяется от низкого состояния до высокого состояния, определение точности Sx выполняется вообще без задержки. Таким образом, точность Sx обнаружения местоположения (точность расстояния до изгиба) транспортного средства MM многократно вычисляется и обновляется с предварительно определенной продолжительностью цикла.
[0039] Затем, на этапе S80, предварительно установленное расстояние до изгиба задается в зависимости от точности Sx расстояния до изгиба. Иными словами, чем ниже становится точность Sx расстояния до изгиба, тем большим задается значение относительно начального значения предварительно установленного расстояния до изгиба. Например, когда точность Sx является средней, предварительно установленное расстояние до изгиба задается равным предварительно определенному расстоянию X[m]. Когда точность Sx является высокой, предварительно установленное расстояние до изгиба задается равным значению, полученному посредством умножения предварительно определенного расстояния X[m] на коэффициент Gain-high (например, 0,5). Когда точность Sx является низкой, предварительно установленное расстояние до изгиба задается равным значению, полученному посредством умножения предварительно определенного расстояния на коэффициент Gain-low (например, 1,5).
[0040] Здесь, предварительно установленное расстояние до изгиба может быть изменено в зависимости от скорости транспортного средства MM. В частности, чем выше скорость транспортного средства, тем меньшим задается предварительно установленное расстояние до изгиба. Это синонимично использованию времени до достижения изгиба в качестве предварительно установленного расстояния до изгиба.
Здесь, процесс изменения относительной позиции предварительно установленной области F-AREA впереди к транспортному средству MM может быть выполнен в зависимости от предварительно установленного расстояния до изгиба.
[0041] Затем, на этапе S90, когда расстояние до изгиба меньше предварительно установленного расстояния до изгиба, процесс подавления начала не выполняется, и процедура обработки переходит к этапу S120. С другой стороны, когда расстояние до изгиба равно или превышает предварительно установленное расстояние до изгиба, процедура обработки переходит к этапу S100.
Затем, на этапе S100, вычисляется точность S обнаружения кривизны β (формы полосы движения) обнаруженной кривой в области впереди. Точность S обнаружения кривизны β кривой в области впереди вычисляется, например, следующим образом.
[0042] Когда кривизна β (форма полосы движения) обнаруживается на основе узлов в картографической информации, сохраненной в навигационном устройстве 31, число N1 обнаруженных точек узлов (число точек в пределах предварительно определенного расстояния), имеющихся в предварительно установленной области F-AREA впереди, является информацией, указывающей ситуацию распознавания. Соответственно, на этапе S100, чем больше число обнаруженных узлов, тем выше определяется точность S.
Например, точность S1 вычисляется с использованием следующего выражения.
S1=N1/Nn0 (4)
Здесь, когда S1>1, S1=1 задается.
S=S1
[0043] Здесь, Nn0 представляет опорное число узлов и является числом, с помощью которого оценивается то, что точность S обнаруженной кривизны β является высокой, когда число узлов равно или превышает число Nn0 узлов. В этом случае, когда S1 равен 1, точность S обнаружения кривизны β в качестве информации формы дороги может быть определена как высокая. С другой стороны, чем меньше S1, тем ниже обнаруживается точность S обнаружения.
[0044] Альтернативно, рисуется аппроксимирующая кривая, соединяющая обнаруженные узлы, вычисляется степень дисперсии N2 расстояний от аппроксимирующей кривой до узлов, и чем меньше степень дисперсии, тем выше определяется точность S.
Например, точность S2 вычисляется с использованием следующего выражения.
S2=N2/Nb0 (5)
Здесь, когда S2>1, S2=1 задается.
S=S2
[0045] Здесь, Nb0 представляет степень дисперсии в качестве опорного значения и является числом, с помощью которого оценивается то, что точность S обнаруженной кривизны β является высокой, когда степень дисперсии равна или превышает Nb0. В этом случае, когда S2 равна 1, точность S обнаружения кривизны β в качестве информации формы дороги может быть определена как высокая. С другой стороны, чем меньше S2, тем ниже обнаруживается точность S обнаружения.
[0046] Здесь, как выражено посредством следующего выражения, точность S1 на основе числа обнаруженных узлов и точность S2 на основе степени дисперсии могут быть комбинированы и могут быть использованы в качестве конечной точности S.
S=S1·S2 (6)
В этом случае, когда S равна 1, точность S обнаружения кривизны β в качестве информации формы дороги может быть определена как высокая. С другой стороны, чем меньше S, тем ниже может быть определена точность S обнаружения.
[0047] Здесь, способ определения точности S обнаружения формы дороги не ограничивается вышеуказанным способом. Например, надежность обнаружения узлов может быть вычислена на основе расстояний от аппроксимирующей кривой до узлов, и точность S обнаружения формы дороги может быть вычислена на основе надежности обнаружения и числа узлов. В частности, например, вычисляются расстояния (отклонение) от аппроксимирующей кривой до узлов, надежность узла, для которого вычисленное расстояние от аппроксимирующей кривой равно 0, задается равной 100%, и чем больше расстояние от аппроксимирующей кривой, тем ниже задается надежность узла. Среднее значение надежности обнаружения всех узлов умножается на число обнаруженных узлов, и результат задается в качестве точности S обнаружения формы дороги. В этом случае, например, в области, из которой обычно обнаруживаются 10 узлов, точность обнаружения вычисляется как S=1, когда среднее значение надежности обнаружения составляет 100%, и число узлов равно 10, и точность обнаружения вычисляется как S=0,5, когда среднее значение надежности обнаружения составляет 50%, и число узлов равно 10.
[0048] Здесь, когда кривизна β кривой сохраняется в качестве картографической информации, и сохраненная кривизна β дороги считывается, чтобы получать кривизну β, точность S может быть определена на основе узлов, как описано выше. Иными словами, формы дорог, сохраненные в картографической информации навигации, в общем, подготавливаются на основе узлов. Соответственно, поскольку чем больше число узлов в пределах предварительно определенного расстояния, тем выше, как считается, точность S кривизны β кривой, сохраненной в качестве картографической информации, можно определять точность S на основе узлов, как описано выше.
[0049] Затем, на этапе S110, процесс подавления начала управления недопущением приближения к препятствию (процесс затруднения определения того, что управление должно начинаться) выполняется в зависимости от точности S обнаружения кривизны β (формы полосы движения), которая является информацией формы дороги.
Здесь описывается случай, в котором начало управления недопущением приближения к препятствию подавляется посредством изменения предварительно установленного угла pth отклонения для определения операции смены полосы движения водителем.
Иными словами, в зависимости от точности S обнаружения кривизны β (формы полосы движения), вычисленной на этапе S100, чем ниже точность S, тем большим задается предварительно установленный угол σth отклонения.
[0050] Например, предварительно установленный угол σth отклонения (предварительно установленный угол σth отклонения, используемый на этапе S120) заранее сохраняется в карте и т.п. таким образом, что чем ниже становится точность S обнаружения, тем больше становится значение разности dth предварительно установленных углов отклонения. Затем, предварительно установленный угол σth отклонения задается посредством извлечения его из карты в зависимости от точности S обнаружения обнаруженной кривизны β. В этом случае, процесс этапа S60 может быть выполнен в данном документе.
Альтернативно, предварительно установленный угол σth отклонения может быть скорректирован таким образом, что предварительно установленный угол σth отклонения становится большим по мере того, как точность S обнаружения кривизны β становится ниже, посредством задания поправочного коэффициента (>1) таким образом, что чем ниже становится точность S обнаружения кривизны β, тем больше становится его значение, и выполнения процесса вычисления конечного угла σth отклонения посредством умножения предварительно установленного угла σth отклонения на поправочный коэффициент.
[0051] Затем, на этапе S120, определяется то, должно ли начинаться управление. В частности, определяется то, превышает ли угол σdriverhosei отклонения, вычисленный на этапе S50, предварительно установленный угол σth отклонения.
Когда угол σdriverhosei отклонения превышает предварительно установленный угол σth отклонения, флаг Fout_obst определения управления недопущением приближения к препятствию активируется. С другой стороны, когда угол σdriverhosei отклонения равен или меньше предварительно установленного угла σth отклонения, флаг Fout_obst определения управления недопущением приближения к препятствию деактивируется.
[0052] Когда направление смены полосы движения посредством руления отличается от направления обнаружения препятствия SM, необязательно выполнять управление недопущением приближения. Соответственно, процесс изменения флага определения управления недопущением приближения к препятствию с деактивации на активацию не выполняется.
Определение относительно того, должен ли деактивироваться флаг Fout_obst определения управления недопущением приближения к препятствию, может быть выполнено с возможностью иметь гистерезис F относительно определения относительно того, должен ли активироваться флаг Fout_obst определения управления недопущением приближения к препятствию, к примеру, "σdriverhosei<σth-F".
[0053] Здесь, условие для обеспечения возможности активации флага Fout_obst определения управления недопущением приближения к препятствию допускается как случай, в котором флаг Fout_obst определения управления недопущением приближения к препятствию деактивируется. В качестве условия для обеспечения возможности активации флага Fout_obst определения управления недопущением приближения к препятствию может добавляться временное условие, такое как условие, при котором предварительно определенное время проходит после того, как флаг Fout_obst определения управления недопущением приближения к препятствию деактивируется.
Здесь, когда предварительно определенное время Tcontrol проходит после того, как флаг Fout_obst определения управления недопущением приближения к препятствию активируется, флаг определения управления недопущением приближения к препятствию может задаваться равным Fout_obst=off, чтобы завершать управление.
[0054] В дальнейшем в этом документе, флаг Fout_obst определения управления недопущением приближения к препятствию называется просто флагом определения управления недопущением приближения к препятствию.
Когда флаг определения управления недопущением приближения к препятствию активируется, определяется направление Dout_obst выполнения управления. Когда водитель поворачивает руль влево, и флаг определения управления недопущением приближения к препятствию активируется, Dout_obst задается как "влево". Когда водитель поворачивает руль вправо, и флаг определения управления недопущением приближения к препятствию активируется, Dout_obst задается как "вправо".
[0055] Когда работает антиблокировочная тормозная система (ABS), система управления тягой (TCS) или система динамического управления транспортного средства (VDC), флаг определения управления недопущением приближения к препятствию может деактивироваться с тем, чтобы не выполнять управление недопущением приближения к препятствию.
Затем, на этапе S130, выполняется процесс выдачи предупреждения. В частности, угол σdriverhosei отклонения, вычисленный на этапе S50, превышает предварительно определенное пороговое значение σth1, выполняется процесс выдачи звука предупреждения.
[0056] Пороговое значение σth1, используемое для того, чтобы определять то, должно ли выдаваться предупреждение, может быть идентичным пороговому значению σth, используемому для определения этапа S120. Здесь, предпочтительно, чтобы пороговое значение σth1 задавалось меньше порогового значения σth, и определялось то, что звук предупреждения выдается, когда σdriverhosei превышает заданное пороговое значение.
[0057] Затем, на этапе S140, задается целевой момент Ms_str относительно вертикальной оси.
Целевой момент Ms_str относительно вертикальной оси вычисляется с использованием следующего выражения.
В случае если флаг определения управления недопущением приближения к препятствию активирован:
Ms_str=K1recv x K2recv x ΔXs
ΔXs=(K0·ΔX+K1mom·φ+K2mom·βdriverhosei)
В случае если флаг определения управления недопущением приближения к препятствию деактивирован:
Ms_str=0 (7)
[0058] Здесь, K1recv представляет пропорциональное усиление, определенное в зависимости от габаритов транспортного средства, и K2recv представляет усиление, варьирующееся в зависимости от скорости V транспортного средства. Например, усиление K2recv имеет предварительно определенное первое значение в зоне низких скоростей, имеет взаимосвязь, обратно пропорциональную скорости V транспортного средства, когда скорость V транспортного средства достигает определенного значения, и имеет постоянное значение, меньшее первого значения, когда скорость V транспортного средства достигает определенной скорости после этого. K0, K1mom и K2mom являются усилениями, надлежащим образом заданными посредством экспериментов и т.п. ΔX представляет варьирование поперечного смещения в единицу времени, и варьирование в направлении, в котором транспортное средство MM приближается к полосе дорожной разметки, задается положительным.
Согласно выражению (7), поскольку возникает увеличение угла φ относительно вертикальной оси с полосой дорожной разметки или скоростью относительно вертикальной оси, постоянно сформированной посредством вынуждения водителя увеличивать величину руления в направлении приближения к полосе дорожной разметки, целевой момент Ms_str относительно вертикальной оси увеличивается.
[0059] Затем, на этапе S150, выполняется процесс формирования скорости относительно вертикальной оси для недопущения приближения к препятствию. Здесь, момент относительно вертикальной оси формируется с использованием тормоза. Ниже подробно описывается способ для вывода Ms.
[0060] Когда целевой момент Ms_str относительно вертикальной оси равен 0, т.е. когда получается результат определения, при котором определяется то, что управление моментом относительно вертикальной оси не выполняется в качестве управления недопущением приближения, целевые давления Psi тормозной жидкости (i=fl, fr, rl, rr) колес задаются равными давлению Pmf и Pmr тормозной жидкости, как выражено посредством выражений (8) и (9).
Psfl=Psfr=Pmf (8)
Psrl=Psrr=Pmr (9)
Здесь, Pmf представляет давление тормозной жидкости для передних колес. Pmr представляет давление тормозной жидкости для задних колес и является значением, вычисленным на основе давления Pmf тормозной жидкости для передних колес с учетом распределения на передние и задние колеса. Pmf и Pmr являются значениями, соответствующими рабочим степеням (давлению Pm жидкости в главном цилиндре) при операции торможения водителя.
[0061] С другой стороны, когда абсолютное значение целевого момента Ms_str относительно вертикальной оси превышает 0, т.е. когда определяется то, что управление недопущением приближения к препятствию должно начинаться, разность ΔPsf целевых давлений тормозной жидкости в передних колесах и разность ΔPsr целевых давлений тормозной жидкости в задних колесах вычисляются на основе целевого момента Ms_str относительно вертикальной оси. В частности, разности ΔPsf и ΔPsr целевых давлений тормозной жидкости вычисляются с использованием выражений (10) и (11).
ΔPsf=2·Kbf·MsxFRratio)/T (10)
ΔPsr=2·Kbr·(Msx(1-FRratio))/T (11)
[0062] Здесь, FRratio представляет распределение тормозной силы на передние и задние колеса. T представляет ширину протектора шины. Ширина T протектора шины для удобства считается имеющей идентичное значение для передних и задних колес. Kbf и Kbr являются коэффициентами преобразования для передних и задних колес, когда тормозная сила преобразуется в давление тормозной жидкости, и определяются в зависимости от технических требований по торможению.
[0063] Таким образом, тормозная сила, сформированная из колес, распределяется в зависимости от абсолютной величины целевого момента Ms_str относительно вертикальной оси, и предварительно определенное значение предоставляется для разностей ΔPsf и ΔPsr целевых давлений тормозной жидкости так, что вызывается разность тормозных сил между левым передним и правым передним колесами и между левым задним и правым задним колесами. Конечные целевые давления Psi тормозной жидкости (i=fl, fr, rl, rr) колес вычисляются с использованием вычисленных разностей ΔPsf и ΔPsr целевых давлений тормозной жидкости.
[0064] В частности, когда абсолютное значение целевого момента Ms_str относительно вертикальной оси превышает 0, и направление Dout_obst выполнения управления задается как "влево", т.е. когда выполняется управление недопущением приближения к препятствию для препятствия SM слева, целевые давления Psi тормозной жидкости (i=fl, fr, rl, rr) колес вычисляются с использованием выражения (12).
Psfl=Pmf
Psfr=Pmf+ΔPsf
Psrl=Pmr
Psrr=Pmr+ΔPsr (12)
[0065] Когда абсолютное значение целевого момента Ms_str относительно вертикальной оси превышает 0, и направление Dout_obst выполнения управления задается как "вправо", т.е. когда выполняется управление недопущением приближения к препятствию для препятствия SM справа, целевые давления Psi тормозной жидкости (i=fl, fr, rl, rr) колес вычисляются с использованием выражения (13).
Psfl=Pmf+ΔPsf
Psfr=Pmf
Psrl=Pmr+ΔPsr
Psrr=Pmr (13)
[0066] Согласно выражениям (12) и (13), разность тормозных сил между левыми и правыми колесами формируется таким образом, что тормозная сила колес находится внутри полосы движения транспортного средства MM.
Здесь, как выражено посредством выражений (12) и (13), целевые давления Psi тормозной жидкости (i=fl, fr, rl, rr) колес вычисляются с учетом операции водителя с тормозом, т.е. давлений Pmf и Pmr тормозной жидкости.
Модуль 8 управления тормозной/движущей силой выводит целевые давления Psi тормозной жидкости (i=fl, fr, rl, rr) колес, вычисленные таким образом, в качестве значений команды управления давлением тормозной жидкости в модуль 7 управления давлением тормозной жидкости.
[0067] В вышеприведенном описании поясняется пример, в котором скорость относительно вертикальной оси формируется в транспортном средстве посредством формирования разности тормозных сил между левыми и правыми колесами транспортного средства, но технология формирования скорости относительно вертикальной оси в транспортном средстве не ограничивается этим. Например, когда контроллер угла поворота при рулении, управляющий углом поворота при рулении с помощью руля, используется в качестве технологии формирования скорости относительно вертикальной оси, целевой угол STR0 поворота при рулении может быть вычислен посредством STR0=Ka x Ms, и фактический угол поворота при рулении может управляться таким образом, что он варьируется посредством целевого угла поворота при рулении STR9 в противоположную сторону относительно стороны, на которой присутствует препятствие SM. Коэффициент Ka является коэффициентом для преобразования момента относительно вертикальной оси в угол поворота при рулении и является коэффициентом, полученным и предварительно заданным посредством экспериментов и т.п.
[0068] В качестве технологии формирования скорости относительно вертикальной оси, посредством вычисления силы поворота при рулении (крутящий момент поворота при рулении) посредством STRtrg=Kb x Ms и использования контроллера угла поворота при рулении, такого как электрический усилитель рулевого управления, и применения вычисленной силы поворота при рулении к операции руления, угол поворота при рулении операции руления может управляться таким образом, что он варьируется в противоположную сторону относительно стороны, на которой присутствует препятствие SM. Коэффициент Kb является коэффициентом для преобразования момента относительно вертикальной оси в крутящий момент поворота при рулении и является коэффициентом, полученным и предварительно заданным посредством экспериментов и т.п.
[0069] ОПЕРАЦИИ И ДРУГОЕ
В этом варианте осуществления, как проиллюстрировано на фиг. 6, выполняется процесс определения того, присутствует ли препятствие SM в области K-AREA обнаружения препятствия, заданной сзади и сбоку от транспортного средства MM. Кривизна β (форма полосы движения) полосы движения в предварительно установленной области F-AREA впереди, заданной перед транспортным средством MM, получается в качестве информации формы дороги. Вычисляется угол σdriverhosei отклонения, который является разностью (увеличением) между прогнозным углом σpath поворота при рулении, вычисленным из кривизны β полосы движения, и фактическим углом поворота при рулении 8. Когда угол σdriverhosei отклонения превышает предварительно установленный угол σthl отклонения, и руление является операцией руления в направлении к препятствию SM, определяется то, что водитель имеет намерение сменить полосу движения в направлении к препятствию SM, и формируется звук предупреждения, чтобы выдавать водителю предупреждение. Когда угол σdriverhosei отклонения превышает предварительно установленный угол σth отклонения, определяется то, что водитель имеет намерение сменить полосу движения в направлении к препятствию SM, и момент относительно вертикальной оси для недопущения приближения к препятствию формируется. Соответственно, можно предоставлять помощь в недопущении приближения транспортного средства MM к препятствию SM.
[0070] Здесь, в этом варианте осуществления, вычисляется точность S обнаружения кривизны β полосы движения впереди транспортного средства MM, и предварительно установленный угол σth отклонения изменяется таким образом, что чем ниже становится точность S обнаружения, тем больше становится предварительно установленный угол σth отклонения. Как результат, по мере того, как точность S обнаружения кривизны β становится ниже, начало управления недопущением приближения к препятствию подавляется в большей степени, т.е. труднее определять то, что управление должно начинаться.
Таким образом, в этом варианте осуществления, когда точность S обнаружения формы дороги является низкой, определение начала управления подавляется. Соответственно, когда точность S обнаружения формы дороги является низкой, можно не допускать выполнения необязательного управления недопущением приближения. Как результат, можно смягчать некомфортное ощущение вследствие необязательного управления недопущением приближения водителя.
[0071] Когда дорога, на которой транспортное средство движется, является прямой дорогой, снижение точности определения намерения сменить полосу движения на основе формы дороги является небольшим. Соответственно, когда расстояние до изгиба, которое является расстоянием от текущей позиции транспортного средства до кривой, равно или превышает предварительно установленное расстояние до изгиба, подавление начала управления запрещается.
В это время, когда точность Sx обнаружения расстояния до изгиба является низкой, начало управления недопущением приближения к препятствию подавляется в большей степени, т.е. труднее определять то, что управление должно начинаться, посредством задания предварительно установленного расстояния до изгиба большим.
[0072] МОДИФИКАЦИИ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
(1) В вышеуказанном варианте осуществления, пример, в котором чем ниже становится точность S обнаружения кривизны β, тем больше изменяется и становится предварительно установленный угол σth отклонения. Вместо этого или наряду с этим, может использоваться конфигурация, в которой чем ниже становится точность S обнаружения кривизны β, тем больше изменяется и становится предварительно установленный угол σth1 отклонения для предупреждения. В этом случае, чем ниже становится точность S обнаружения кривизны β, тем больше подавляется процесс выдачи предупреждения.
[0073] (2) Когда информация формы дороги (информация кривой) относительно дороги впереди транспортного средства MM определяется с помощью передней камеры 13, процесс этапа S100 может быть выполнен следующим образом.
Иными словами, изображение предварительно установленной области F-AREA впереди, заданной впереди в направлении движения транспортного средства MM, захватывается с помощью передней камеры 13, и края полос дорожной разметки полосы движения получаются посредством обработки захваченного изображения. В качестве способа получения краев полос дорожной разметки может использоваться вышеуказанный известный способ. На основе числа определенных точек (которое может быть числом точек в пределах предварительно определенного расстояния) краев полос дорожной разметки, полученных из предварительно установленной области F-AREA впереди, определяется то, что точность S обнаружения формы дороги является низкой, когда число определенных точек меньше предварительно определенного опорного числа. Альтернативно, рисуется аппроксимирующая кривая, соединяющая точки краев, и определяется то, что чем больше степень дисперсии расстояний от аппроксимирующей кривой до точек краев, тем ниже точность S обнаружения формы дороги.
[0074] Например, когда форма дороги в области впереди определяется с помощью передней камеры 13, точность S обнаружения формы дороги может быть вычислена на основе числа определенных точек краев полос дорожной разметки и надежности обнаружения точек краев полос дорожной разметки. В частности, например, когда яркость точки края равна или превышает предварительно определенное значение яркости, надежность обнаружения точки края задается равной 100%. Чем более низкую яркость имеет точка края, тем ниже задается надежность обнаружения точки края. Затем, точность S обнаружения формы дороги вычисляется посредством умножения среднего значения надежности обнаружения всех точек краев на число определенных точек краев. В этом случае, например, как описано выше, в области, из которой обычно обнаруживаются 10 точек краев, точность обнаружения вычисляется как S1, когда среднее значение надежности обнаружения составляет 100%, и число точек краев равняется 10, и точность обнаружения вычисляется как S0,5, когда среднее значение надежности обнаружения составляет 50%, и число точек краев равняется 10.
Вышеуказанный способ может быть использован в качестве способа определения точности S обнаружения.
[0075] (3) Когда информация формы дороги (информация кривой) для дороги впереди транспортного средства MM получается посредством связи между транспортным средством и дорожной инфраструктурой с инфраструктурой либо связи между транспортными средствами с другим транспортным средством и т.п., процесс этапа S100 может быть выполнен следующим образом.
Иными словами, когда информация узла полосы движения впереди в направлении движения получается посредством связи между транспортным средством и дорожной инфраструктурой или связи между транспортными средствами, точность S обнаружения определяется на основе узлов, аналогично модификации (2).
[0076] Когда кривизна β дороги, передаваемая из инфраструктуры или другого транспортного средства, принимается, чтобы получать кривизну β посредством связи между транспортным средством и дорожной инфраструктурой или связи между транспортными средствами, определяется то, что чем ближе кривизна β к одной кривизне β, тем ниже точность S. Иными словами, в фактической дорожной ситуации, даже одна кривая формируется из кривых с несколькими кривизнами β, и искривленная дорога, сформированная из кривой с одной кривизной β, является редкой. Следовательно, можно оценивать, что по мере того, как кривизна β становится ближе к одной кривизне β, точность S становится ниже.
[0077] (4) В процессе этапа S110 следующий процесс выполняется вместо вышеуказанного процесса или вместе с ним, и начало управления может подавляться (может быть затруднительным определять то, что управление должно начинаться).
В этой модификации диапазон обнаружения препятствия SM регулируется таким образом, чтобы подавлять начало управления недопущением приближения к препятствию.
В частности, на основе точности S обнаружения кривизны β (формы полосы движения), определенной на этапе S30, чем ниже точность S обнаружения, тем более узким задается диапазон расстояния в продольном направлении области K-AREA обнаружения препятствия, причем присутствие препятствия SM определяется из области K-AREA обнаружения препятствия. Например, диапазон определения задается от поперечной стороны транспортного средства MM до 7 м позади транспортного средства MM, когда точность S обнаружения является высокой, диапазон определения задается от поперечной стороны транспортного средства MM до 3 м позади транспортного средства MM, когда точность S обнаружения является низкой, и диапазон определения между ними линейно регулируется в зависимости от точности S обнаружения.
[0078] Альтернативно, на основе точности S обнаружения кривизны β (формы полосы движения), определенной на этапе S30, чем ниже точность S обнаружения, тем более узким задается диапазон расстояния в поперечном направлении области K-AREA обнаружения препятствия, причем присутствие препятствия SM определяется из области K-AREA обнаружения препятствия. Например, диапазон определения задается вплоть до 3 м от транспортного средства MM в поперечном направлении, когда точность S обнаружения является высокой, диапазон определения задается вплоть до 1,5 м от транспортного средства MM в поперечном направлении, когда точность S обнаружения является низкой, и диапазон определения между ними линейно регулируется в зависимости от точности S обнаружения.
[0079] (5) Чем меньше становится расстояние между транспортным средством MM и полосой дорожной разметки, тем меньшей может задаваться степень сужения области K-AREA обнаружения препятствия, посредством чего степень подавления начала управления недопущением приближения к препятствию может быть уменьшена по мере того, как расстояние между транспортным средством MM и полосой дорожной разметки становится меньше.
Здесь, этап S30 соответствует модулю обнаружения формы дороги. Датчик 19 угла поворота при рулении соответствует модулю обнаружения величины руления. Модуль 26 формирования изображений и этап S20 соответствуют модулю обнаружения препятствия. Этап S50 соответствует модулю определения намерений водителя. Этап S120 соответствует модулю определения начала управления.
Этапы S130-S150 соответствуют модулю управления недопущением приближения к препятствию. Этап S100 соответствует модулю определения точности обнаружения и модулю извлечения точек краев. Этапы S70-S90 и S110 соответствуют модулю подавления определения начала. Этап S40 соответствует модулю вычисления прогнозного угла поворота при рулении. Передняя камера 13 соответствует модулю формирования изображений спереди. Этап S70 соответствует модулю обнаружения расстояния до изгиба и модулю позиционирования транспортного средства. Этап S80 соответствует модулю обнаружения точности позиционирования и модулю обнаружения расстояния до изгиба.
[0080] ПРЕИМУЩЕСТВА ЭТОГО ВАРИАНТА ОСУЩЕСТВЛЕНИЯ
Этот вариант осуществления обеспечивает следующие преимущества. (1) Модуль 8 управления тормозной/движущей силой обнаруживает форму дороги в предварительно установленной области F-AREA впереди, которая является предварительно определенным диапазоном, заданным перед транспортным средством MM. Модуль 8 управления тормозной/движущей силой задает, по меньшей мере, область сзади и сбоку от транспортного средства MM в качестве области K-AREA обнаружения препятствия и определяет препятствие SM, имеющееся в области K-AREA обнаружения препятствия. Модуль 8 управления тормозной/движущей силой определяет намерение водителя сменить полосу движения на основе определенной формы дороги (кривизны β дороги) и определенного угла поворота при рулении (величины руления). Модуль 8 управления тормозной/движущей силой определяет то, что управление недопущением приближения для помощи в недопущении приближения транспортного средства MM к препятствию SM должно начинаться, когда определяется то, что водитель имеет намерение сменить полосу движения, и обнаруживается препятствие SM. Когда определяется то, что управление должно начинаться, модуль 8 управления тормозной/движущей силой выполняет управление недопущением приближения. Модуль 8 управления тормозной/движущей силой определяет точность S обнаружения формы дороги. Модуль 8 управления тормозной/движущей силой подавляет определение относительно того, должно ли начинаться управление недопущением приближения, когда определенная точность S обнаружения ниже предварительно установленного порогового значения точности.
[0081] Согласно этой конфигурации, когда точность S обнаружения формы дороги является низкой, подавляется начало управления недопущением приближения. Соответственно, когда точность S обнаружения формы дороги является низкой, можно уменьшать выполнение необязательного управления недопущением приближения (вмешательство посредством необязательного управления недопущением приближения). Соответственно, при реализации при вождении для препятствия SM сзади и сбоку от транспортного средства MM можно подавлять некомфортное ощущение, возникающее у водителя.
[0082] (2) Модуль 8 управления тормозной/движущей силой вычисляет прогнозный угол поворота при рулении, который является углом поворота при рулении, необходимым для движения вдоль определенной формы дороги. Модуль 8 управления тормозной/движущей силой определяет то, что водитель имеет намерение сменить полосу движения, когда угол отклонения между определенным фактическим углом поворота при рулении и прогнозным углом поворота при рулении равен или превышает предварительно установленный угол отклонения.
Согласно этой конфигурации, угол поворота при рулении используется в качестве величины руления. Соответственно, можно определять то, имеет ли водитель намерение сменить полосу движения, например, на основе величины руления, превышающей угол поворота при рулении, необходимый для движения по искривленной дороге.
[0083] (3) Модуль 8 управления тормозной/движущей силой подавляет определение относительно того, должно ли начинаться управление недопущением приближения, посредством изменения предварительно установленного угла отклонения на большее значение.
Согласно этой конфигурации, можно реализовывать подавление определения относительно того, должно ли начинаться управление недопущением приближения, посредством увеличения порогового значения для определения относительно того, имеет ли водитель намерение сменить полосу движения.
(4) Модуль 8 управления тормозной/движущей силой подавляет определение относительно того, должно ли начинаться управление недопущением приближения, посредством сужения диапазона области K-AREA обнаружения препятствия.
Согласно этой конфигурации, можно реализовывать подавление определения относительно того, должно ли начинаться управление недопущением приближения, посредством сужения диапазона области K-AREA обнаружения препятствия.
[0084] (5) Модуль 8 управления тормозной/движущей силой обнаруживает форму дороги в предварительно установленной области F-AREA впереди на основе нескольких узлов, имеющихся в позициях на карте, соответствующих предварительно установленной области F-AREA впереди, заданной перед транспортным средством MM в картографической информации, сохраненной в навигационном устройстве 31. Модуль 8 управления тормозной/движущей силой определяет точность S обнаружения формы дороги таким образом, что чем больше пространства между несколькими узлами, тем ниже точность обнаружения.
Согласно этой конфигурации, точность S обнаружения задается на основе пространств между узлами (последовательности точек), задающими форму кривой. Соответственно, можно определять точность S обнаружения в сочетании с точностью S обнаружения в отношении того, как проходит варьирование кривой.
[0085] (6) Модуль 8 управления тормозной/движущей силой обнаруживает форму дороги в предварительно установленной области F-AREA впереди на основе нескольких узлов, имеющихся в позициях на карте, соответствующих предварительно установленной области F-AREA впереди, заданной перед транспортным средством MM в картографической информации, сохраненной в навигационном устройстве 31. Модуль 8 управления тормозной/движущей силой вычисляет аппроксимирующую кривую нескольких узлов и определяет точность S обнаружения формы дороги таким образом, что чем больше дисперсия расстояний от аппроксимирующей кривой до нескольких узлов, тем ниже точность обнаружения.
Согласно этой конфигурации, точность S обнаружения задается на основе дисперсии узлов, задающих форму кривой. Соответственно, можно определять точность S обнаружения в сочетании с точностью S обнаружения в отношении того, как проходит варьирование кривой.
[0086] (7) Модуль 8 управления тормозной/движущей силой обрабатывает изображение, захваченное с помощью передней камеры 13, и извлекает несколько точек краев для указания разделительной линии полосы движения, имеющейся в предварительно установленной области F-AREA впереди. Модуль 8 управления тормозной/движущей силой обнаруживает форму дороги в предварительно установленной области F-AREA впереди перед транспортным средством MM на основе извлеченных нескольких точек краев. Модуль 8 управления тормозной/движущей силой определяет точность S обнаружения формы дороги таким образом, что чем меньше число определенных точек краев, тем ниже значение точности определения.
Согласно этой конфигурации, форма дороги в предварительно установленной области F-AREA впереди перед транспортным средством MM определяется на основе извлеченных нескольких точек краев. Когда точность формирования изображений является низкой, число точек краев снижается. Как результат, можно определять точность S обнаружения формы дороги.
[0087] (8) Модуль 8 управления тормозной/движущей силой обрабатывает изображение, захваченное с помощью передней камеры 13, и извлекает несколько точек краев для указания разделительной линии полосы движения, имеющейся в предварительно установленной области F-AREA впереди. Модуль 8 управления тормозной/движущей силой обнаруживает форму дороги в предварительно установленной области F-AREA впереди перед транспортным средством MM на основе извлеченных нескольких точек краев. Модуль 8 управления тормозной/движущей силой вычисляет аппроксимирующую кривую нескольких точек краев и определяет точность S обнаружения формы дороги таким образом, что чем больше дисперсия расстояний между аппроксимирующей кривой и несколькими точками краев, тем ниже значение точности определения.
Согласно этой конфигурации, точность S обнаружения задается на основе дисперсии точек краев, задающих форму кривой. Соответственно, можно определять точность S обнаружения в сочетании с точностью S обнаружения в отношении того, как проходит варьирование кривой.
[0088] (9) Модуль 8 управления тормозной/движущей силой обнаруживает расстояние до изгиба, которое является расстоянием от текущей позиции транспортного средства MM до начальной позиции искривленной дороги впереди в направлении движения транспортного средства MM. Модуль 8 управления тормозной/движущей силой подавляет определение относительно того, должно ли начинаться управление недопущением приближения только тогда, когда определенное расстояние до изгиба равно или меньше предварительно установленного расстояния до изгиба.
Форма искривленной дороги приводит к проблеме при определении намерения сменить полосу движения. С учетом этого, посредством подавления определения в отношении того, должно ли начинаться управление недопущением приближения только тогда, когда расстояние до изгиба равно или меньше предварительно установленного расстояния до изгиба, можно уменьшать подавление определения относительно того, должно ли начинаться необязательное управление недопущением приближения.
[0089] (10) Модуль 8 управления тормозной/движущей силой определяет точность обнаружения позиции транспортного средства MM. Модуль 8 управления тормозной/движущей силой обнаруживает расстояние до изгиба на основе определенной позиции транспортного средства MM. Модуль 8 управления тормозной/движущей силой задает предварительно установленное расстояние до изгиба так, что оно является большим по мере того, как становится ниже определенная точность обнаружения.
Согласно этой конфигурации, когда точность обнаружения расстояния до изгиба является низкой, предварительно установленное расстояние до изгиба задается большим, чтобы подавлять определение относительно того, должно ли начинаться управление недопущением приближения. Как результат, можно уменьшать выполнение необязательного управления недопущением приближения.
[0090] (11) Модуль 8 управления тормозной/движущей силой обнаруживает кривизну β дороги в качестве формы дороги.
Соответственно, можно определять форму дороги.
(12) Управление недопущением приближения представляет собой, по меньшей мере, одно из управления уведомлением водителя и управления для задания момента относительно вертикальной оси в противоположном направлении относительно направления смены полосы движения транспортного средства MM.
Соответственно, можно предоставлять помощь в недопущении приближения.
[0091] ВТОРОЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ
Ниже описывается второй вариант осуществления со ссылкой на прилагаемые чертежи. Элементы, идентичные элементам в вышеуказанном варианте осуществления, обозначаются посредством идентичных ссылок с номерами.
Базовая конфигурация этого варианта осуществления является идентичной базовой конфигурации в первом варианте осуществления. Во втором варианте осуществления, скорость руления вместо угла поворота при рулении используется в качестве величины руления.
[0092] Ниже описываются процессы, отличающиеся от процессов первого варианта осуществления.
В этом варианте осуществления, процедура обработки, проиллюстрированная на фиг. 7, выполняется вместо процедуры обработки (фиг. 5), описанной в первом варианте осуществления. Отличия описываются ниже.
В процессе этапа S20a (процессе обнаружения препятствия SM), препятствие SM определяется с использованием задней камеры в первом варианте осуществления. Напротив, во втором варианте осуществления, используется конфигурация, проиллюстрированная на фиг. 4, и препятствие SM определяется с использованием радаров (24L и 24R) диапазона миллиметровых волн.
[0093] В процессе этапа S30a кривизна β штрихпунктирной линии движения получается посредством обработки изображения, захваченного с помощью передней камеры 13 во втором варианте осуществления.
На этапе S40a, прогнозная скорость σpath′ руления вычисляется с использованием кривизны β полосы движения, полученной в качестве информации кривой в области впереди. Прогнозный угол σpath′ поворота при рулении является скоростью руления, необходимой для принудительного поддержания посредством транспортного средства MM пути движения, т.е. скоростью руления, необходимой для обеспечения принудительного движения транспортного средства MM по полосе движения. Прогнозная скорость σpath′ руления может быть вычислена посредством различения прогнозного угла σpath поворота при рулении.
[0094] На этапе S50a, определяется скорость σdriverhosei′ отклонения. Здесь, символ " ′ " представляет дифференциал первого порядка.
Скорость σdriverhosei′ отклонения вычисляется с использованием следующего выражения.
σdriverhosei′=σ′-σpath′ (14)
На этапе S60a, предварительно установленная скорость σthx отклонения используется для того, чтобы определять то, должно ли начинаться управление недопущением приближения для недопущения приближения к препятствию SM.
Предварительно установленная скорость σthx отклонения является значением, которое становится меньшим по мере того, как становится выше скорость транспортного средства. Предварительно установленная скорость σthx отклонения задается, например, в качестве карты, соответствующей скорости транспортного средства.
[0095] Предварительно установленная скорость σthx отклонения может задаваться в качестве карты таким образом, что чем ближе транспортное средство MM к полосе дорожной разметки, тем меньше ее значение. Альтернативно, предварительно установленная скорость σthx отклонения может задаваться в качестве карты таким образом, что чем ближе транспортное средство MM к препятствию SM, тем меньше ее значение.
На этапе S100a, например, изменяется предварительно установленная скорость σthx отклонения используемая для того, чтобы определять то, выполняется или нет смена полосы движения. Изменение предварительно установленной скорости σthx отклонения может быть выполнено посредством процесса, идентичного процессу, описанному на этапе S100 в первом варианте осуществления.
[0096] Затем, на этапе S120a, определяется то, должно ли начинаться управление. В частности, определяется то, превышает ли скорость σdriverhosei′ отклонения, вычисленная на этапе S50a, предварительно установленную скорость σthx отклонения. Когда определяется то, что σdriverhosei′ превышает предварительно установленную скорость σthx отклонения, управление недопущением приближения к препятствию активируется. С другой стороны, когда σdriverhosei′ равна или меньше предварительно установленной скорости σthx отклонения, флаг определения управления недопущением приближения к препятствию деактивируется. Здесь, когда направление руления отличается от направления обнаружения препятствия, изменение флага определения управления недопущением приближения к препятствию с деактивации на активацию запрещается.
Гистерезис F может быть задан, к примеру "σdriverhosei′<σthx-F".
Остальная конфигурация является идентичной конфигурации в первом варианте осуществления.
[0097] ОПЕРАЦИИ И ДРУГОЕ
В этом варианте осуществления, выполняется процесс определения того, присутствует ли препятствие SM в области K-AREA обнаружения препятствия, заданной сзади и сбоку от транспортного средства MM. Кривизна β (форма полосы движения) полосы движения в предварительно установленной области F-AREA впереди, заданной перед транспортным средством MM, получается в качестве информации формы дороги. Кроме того, вычисляется скорость σdriverhosei′ отклонения, которая является отклонением между прогнозной скоростью σpath′ руления, вычисленной из кривизны β полосы движения, и фактической скоростью σ′ руления. Когда скорость σdriverhosei′ отклонения превышает предварительно установленную скорость отклонения σth1x, и руление является операцией руления в направлении к препятствию SM, определяется то, что водитель имеет намерение сменить полосу движения в направлении к препятствию SM, и формируется звук предупреждения, чтобы выдавать водителю предупреждение. Когда скорость σdriverhosei′ отклонения превышает предварительно установленную скорость σthx отклонения, определяется то, что водитель имеет намерение сменить полосу движения в направлении к препятствию SM, и момент относительно вертикальной оси для недопущения приближения к препятствию SM формируется. Соответственно, можно предоставлять помощь в недопущении приближения транспортного средства MM к препятствию SM.
[0098] Здесь, в этом варианте осуществления, точность S обнаружения кривизны β полосы движения впереди транспортного средства MM вычисляется, и предварительно установленная скорость σht′ отклонения изменяется таким образом, что чем ниже становится точность S обнаружения, тем больше становится предварительно установленная скорость σthx отклонения. Как результат, по мере того, как точность S обнаружения кривизны β становится ниже, начало управления недопущением приближения к препятствию подавляется в большей степени, т.е. труднее определять то, что управление должно начинаться.
[0099] Таким образом, в этом варианте осуществления, когда точность S обнаружения формы дороги является низкой, определение начала управления подавляется. Соответственно, когда точность S обнаружения формы дороги является низкой, можно не допускать выполнения необязательного управления недопущением приближения. Как результат, можно смягчать некомфортное ощущение водителя вследствие необязательного управления недопущением приближения.
Здесь, этап S50a соответствует модулю вычисления прогнозной скорости руления. Этап S120a соответствует модулю определения намерений водителя. Этап S110 соответствует модулю подавления определения начала.
[0100] ПРЕИМУЩЕСТВА ЭТОГО ВАРИАНТА ОСУЩЕСТВЛЕНИЯ
Этот вариант осуществления обеспечивает следующие преимущества в дополнение к преимуществам, описанным в первом варианте осуществления. (1) Модуль 8 управления тормозной/движущей силой вычисляет прогнозную скорость руления, которая является скоростью руления, необходимой для обеспечения принудительного движения транспортного средства MM вдоль определенной формы дороги. Модуль 8 управления тормозной/движущей силой определяет то, что водитель имеет намерение сменить полосу движения, когда скорость отклонения между определенной фактической скоростью руления и вычисленной прогнозной скоростью руления равна или превышает предварительно установленную скорость отклонения.
Согласно этой конфигурации, отклонение руления для определения оценки намерения водителя определяется в качестве угловой скорости руления. Соответственно, когда руление выполняется согласно угловой скорости руления, необходимой для движения по кривой, можно определять то, что руление не является рулением для поддержания полосы движения. Иными словами, можно определять намерение водителя сменить полосу движения.
[0101] (2) Модуль 8 управления тормозной/движущей силой подавляет определение относительно того, должно ли начинаться управление недопущением приближения, посредством изменения предварительно установленной скорости отклонения на большее значение.
Согласно этой конфигурации, можно подавлять определение относительно того, должно ли начинаться управление недопущением приближения, посредством задания порогового значения для определения намерения водителя сменить полосу движения равным большему значению.
[0102] ТРЕТИЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ
Ниже описывается третий вариант осуществления со ссылкой на прилагаемые чертежи. Элементы, идентичные элементам в вышеуказанном варианте осуществления, обозначаются посредством идентичных ссылок с номерами.
Базовая конфигурация этого варианта осуществления является идентичной базовой конфигурации в первом варианте осуществления.
В третьем варианте осуществления, определяется то, должно ли начинаться управление, на основе упрежденной поперечной позиции, прогнозированной на основе руления, вместо использования фактической величины руления. В частности, управление выполняется на основе варьирования поперечной позиции транспортного средства MM после предварительно определенного времени Ts.
Этапы S40b-S120b и S140b выполняются, как проиллюстрировано на фиг. 8, вместо этапов S40-S120 и S140, описанных в первом варианте осуществления.
[0103] Ниже описываются процессы различных этапов.
На этапе S40b, нейтральная скорость φ′path относительно вертикальной оси для поддержания пути движения вычисляется с использованием кривизны β движения. Нейтральная скорость φ′path относительно вертикальной оси вычисляется, например, с использованием следующего выражения.
φ′path=β x V (15)
Среднее φ′ave скоростей φ′ относительно вертикальной оси в течение предварительно определенного времени или значение, полученное посредством фильтрации скорости φ′ относительно вертикальной оси с помощью фильтра, имеющего большую постоянную времени, может быть просто использовано в качестве нейтральной скорости φ′path относительно вертикальной оси для поддержания пути движения.
[0104] На этапе S45b, задается время Tt взгляда в области впереди. Время Tt взгляда в области впереди является индексом для определения порогового значения, используемого для того, чтобы прогнозировать состояние контакта водителя с препятствием SM в будущем.
На этапе S50b, прогнозная поперечная позиция ΔXb транспортного средства в поперечном направлении относительно текущей позиции в пределах полосы движения вычисляется, чтобы определять то, что водитель изменяет полосу движения со съездом с полосы движения.
[0105] Прогнозная поперечная позиция ΔXb транспортного средства в будущем вычисляется с использованием следующего выражения.
ΔXb=(K1φ+K2φm+K3φm′) (16)
Здесь, используются следующие определения.
L: расстояние до точки взгляда в области впереди = время взгляда в области впереди Tt x V
φ: угол относительно вертикальной оси
φm: целевая угловая скорость относительно вертикальной оси (целевая скорость Ψdriverhosei относительно вертикальной оси x время T взгляда в области впереди)
φm′: целевое угловое ускорение относительно вертикальной оси (целевая угловая скорость φm′ относительно вертикальной оси x время T2 взгляда в области впереди),
[0106] Это выражение может выражаться посредством следующего выражения с использованием времени T взгляда в области впереди таким образом, чтобы преобразовывать члены в размерность угла относительно вертикальной оси.
ΔXb=L(K1φ+K2φm x T+K3φm′ x T2) (17)
На основе этой характеристики, K1 является предварительно установленным усилением на основе функции от скорости транспортного средства, K2 является предварительно установленным усилением на основе функции от скорости транспортного средства и времени взгляда в области впереди, и K3 является предварительно установленным усилением на основе функции от скорости транспортного средства и квадрата времени взгляда в области впереди.
[0107] ΔXb, вычисленный в данном документе, используется для того, чтобы определять то, должно ли начинаться управление недопущением приближения для недопущения приближения к препятствию SM, на следующей стадии.
Здесь, ΔXb вычисляется с использованием следующего выражения, в котором целевая скорость Ψdriverhosei относительно вертикальной оси получается посредством вычитания скорости относительно вертикальной оси φ′path, необходимой для движения по пути, вычисленной на этапе S40b, из так называемой целевой скорости Ψdriver относительно вертикальной оси, вычисленной из угла поворота при рулении и скорости транспортного средства, с тем чтобы различать влияние на руление для движения по искривленной дороге.
Ψdriverhosei=Ψdriver-φ′path (18)
[0108] На этапе S60b, задается предварительно установленная поперечная позиция, которая является пороговым значением для определения относительно того, должно ли начинаться управление недопущением приближения для недопущения приближения к препятствию SM.
В качестве предварительно установленной поперечной позиции препятствия SM определяется поперечная позиция препятствия SM на координате по оси X, которая является перпендикулярной полосе движения, когда полоса движения задается как ось Y. Расстояние между транспортным средством MM и препятствием SM, указываемое посредством ΔO на фиг. 9, вычисляется и задается в качестве предварительно установленной поперечной позиции.
[0109] Здесь, когда расстояние до препятствия SM варьируется вследствие определения с использованием радара, и в силу этого трудно определять препятствие, предварительно установленная поперечная позиция может задаваться, если препятствие SM фактически присутствует в предварительно установленной поперечной позиции за пределами полосы дорожной разметки, например, на основе того, определяется ли препятствие SM из предварительно определенной области K-AREA обнаружения препятствия, заданной с поперечной стороны транспортного средства MM. В этом случае, предполагается, что препятствие SM присутствует, например, в предварительно определенной позиции за пределами полосы дорожной разметки.
[0110] Область обнаружения для обнаружения препятствия SM задается равной предварительно определенной продольной и поперечной позиции с поперечной стороны транспортного средства MM.
На этапе S110b, на основе точности S обнаружения формы дороги (кривой), определенной на этапе S100, предварительно установленная поперечная позиция ΔO (в случае определения с использованием условия 1) сбрасывается, так что предварительно установленная поперечная позиция ΔO становится больше по мере того, как становится ниже точность S обнаружения, с тем чтобы затруднять выполнение определения.
[0111] В частности, например, предварительно установленная поперечная позиция ΔO, соответствующая точности S обнаружения кривизны β, заранее сохраняется в карте и т.п., и предварительно установленная поперечная позиция ΔO сбрасывается посредством извлечения ее из карты в зависимости от определенной точности S обнаружения кривизны β. Альтернативно, может задаваться поправочный коэффициент (>1), который становится большим по мере того, как точность S обнаружения кривизны β становится ниже, заданный поправочный коэффициент умножается на предварительно установленную поперечную позицию ΔO, и предварительно установленная поперечная позиция ΔO может быть скорректирована таким образом, что предварительно установленная поперечная позиция ΔO становится большей по мере того, как становится ниже точность S обнаружения кривизны β.
[0112] Здесь, когда используется условие 2 или условие 3, которые описываются ниже, XO или Xthresh задаются равными предварительно определенному начальному значению в качестве предварительно установленной поперечной позиции.
На этапе S120b, как проиллюстрировано на фиг. 9, оценивается поперечная позиция транспортного средства MM после того, как проходит предварительно определенное истекшее время, и определяется то, что водитель выполняет операцию смены полосы движения с тем, чтобы приближаться к препятствию SM, когда прогнозная поперечная позиция ΔXb, которая является отклонением между поперечной позицией после того, как проходит оцененное предварительно определенное истекшее время, и текущей поперечной позицией, равна или превышает расстояние ΔO в поперечном направлении между транспортным средством MM и определенным препятствием SM (условие 1).
[0113] Здесь, ΔO задается равным значению, полученному посредством деления фактического расстояния до препятствия SM на допустимый запас. Коррекция позиции, которая описывается ниже, выполняется на основе допустимого запаса.
Когда расстояние ΔO между транспортным средством MM и препятствием SM не определяется или не может быть определено, предварительно установленная поперечная позиция X2obst вместо этого может задаваться равной предварительно определенной позиции от полосы дорожной разметки в качестве опорного значения, и определение может быть выполнено в зависимости от того, достигает или нет оцененная упрежденная позиция ΔX2 от полосы дорожной разметки предварительно определенной позиции (условие 2).
[0114] Пороговое значение, которое задается как предварительно определенная позиция от полосы дорожной разметки, может задаваться внутри полосы дорожной разметки. Альтернативно, определение может быть выполнено, когда прогнозируется, что упрежденная позиция перемещается на предварительно определенное конкретное расстояние Xthresh от позиции транспортного средства (условие 3). Взаимосвязь поперечной позиции с препятствием SM или полосой дорожной разметки может быть определена вместо прогнозной поперечной позиции ΔXb.
Вышеуказанные условия могут быть описаны посредством следующих выражений.
Условие 1: ΔXb>=ΔO
Условие 2: ΔXb>=X2obst+X0
Условие 3: ΔXb>=Xthresh
Здесь, прогнозная поперечная позиция ΔXb вычисляется как ΔXbL/ΔXbR для левого края и правого края транспортного средства и используется для определения.
[0115] Транспортное средство позади транспортного средства MM может задаваться в качестве целевого препятствия SM, и встречное транспортное средство впереди на соседней полосе движения может задаваться в качестве цели управления.
На этапе S140b, задается выходной момент Ms относительно вертикальной оси.
Выходной момент Ms относительно вертикальной оси вычисляется посредством следующего выражения.
Ms_str=K1recv x K2recv x ΔXs
ΔXs=(K0mom x поперечная позиция+K1momφ+K2momφm)
[0116] Альтернативно, может быть использовано любое из ΔXs=ΔO-ΔXb, X2obst+XO-ΔXb и Xthresh-ΔXb (отклонение от опорного порогового значения в прогнозной поперечной позиции)
Здесь, K1recv является пропорциональным усилением, определенным в зависимости от габаритов транспортного средства, и K2recv является усилением, варьирующимся в зависимости от скорости V транспортного средства.
Усиление K2 имеет, например, большое значение в зоне низких скоростей, имеет обратное пропорциональное соотношение относительно скорости V транспортного средства, когда скорость V транспортного средства достигает определенного значения, и имеет небольшое постоянное значение, когда скорость транспортного средства достигает определенной скорости V.
Остальная конфигурация является идентичной конфигурации в первом варианте осуществления.
[0117] ОПЕРАЦИИ И ДРУГОЕ
В этом варианте осуществления, прогнозная поперечная позиция, которая является поперечной позицией транспортного средства MM в направлении ширины полосы движения, и в которой, как оценивается, находится транспортное средство после предварительно определенного времени на основе определенной формы дороги. Когда оцененная прогнозная поперечная позиция ΔXb находится за пределами предварительно установленной поперечной позиции, которая является предварительно установленной позицией в направлении ширины полосы движения, определяется то, что водитель имеет намерение сменить полосу движения. Когда препятствие SM определяется в направлении смены полосы движения, управление недопущением приближения начинается.
В это время, определение относительно того, должно ли начинаться управление недопущением приближения, подавляется посредством изменения предварительно установленной поперечной позиции в направлении ширины полосы движения на внешнюю позицию в направлении ширины полосы движения по мере того, как становится ниже точность S обнаружения формы дороги.
[0118] Как результат, в этом варианте осуществления, когда точность S обнаружения формы дороги является низкой, определение начала управления подавляется. Соответственно, когда точность S обнаружения формы дороги является низкой, можно не допускать выполнения необязательного управления недопущением приближения. Как результат, можно смягчать некомфортное ощущение водителя вследствие необязательного управления недопущением приближения.
Здесь, этап S50b соответствует модулю обнаружения величины руления. Этап S120b соответствует модулю определения намерений водителя. Этап S110b соответствует модулю подавления определения начала. Этап S60b соответствует модулю обнаружения позиции препятствия.
[0119] ПРЕИМУЩЕСТВА ЭТОГО ВАРИАНТА ОСУЩЕСТВЛЕНИЯ
Этот вариант осуществления обеспечивает следующие преимущества в дополнение к преимуществам, описанным в первом варианте осуществления.
(1) Модуль 8 управления тормозной/движущей силой оценивает прогнозную поперечную позицию, которая является поперечной позицией транспортного средства MM в направлении ширины полосы движения, и в которой, как оценивается, находится транспортное средство после предварительно определенного времени, на основе формы дороги, обнаруженной посредством модуля обнаружения формы дороги. Модуль 8 управления тормозной/движущей силой определяет то, что водитель имеет намерение сменить полосу движения, когда оцененная прогнозная поперечная позиция находится за пределами предварительно установленной поперечной позиции, которая является предварительно установленной позицией в направлении ширины полосы движения.
Согласно этой конфигурации, величина руления для определения намерения водителя вычисляется посредством варьирования упрежденной поперечной позиции. Соответственно, определение выполняется с использованием величины руления, полученной посредством всестороннего рассмотрения угла поворота при рулении и скорости руления. Соответственно, можно определять то, что водитель имеет намерение сменить полосу движения, когда руление выполняется согласно углу поворота при рулении и скорости, необходимой для движения по искривленной дороге.
[0120] (2) Модуль 8 управления тормозной/движущей силой подавляет определение относительно того, должно ли начинаться управление недопущением приближения, посредством изменения предварительно установленной поперечной позиции в направлении ширины полосы движения на внешнюю позицию в направлении ширины полосы движения.
Согласно этой конфигурации, можно реализовывать подавление определения относительно того, должно ли начинаться управление недопущением приближения.
(3) Модуль 8 управления тормозной/движущей силой определяет позицию препятствия SM, обнаруженного посредством модуля обнаружения препятствия относительно транспортного средства MM в направлении ширины полосы движения. Предварительно установленная поперечная позиция задается равной позиции ΔO препятствия SM, определенной посредством модуля обнаружения позиции препятствия относительно транспортного средства MM в направлении ширины полосы движения.
Согласно этой конфигурации, можно реализовывать подавление определения относительно того, должно ли начинаться управление недопущением приближения.
[0121] (4) Предварительно установленная поперечная позиция задается равной позиции Xthresh, которая отстоит на предварительно определенное расстояние в направлении ширины полосы движения от текущей поперечной позиции транспортного средства MM в направлении ширины полосы движения.
Согласно этой конфигурации, можно реализовывать подавление определения относительно того, должно ли начинаться управление недопущением приближения.
(5) Предварительно установленная поперечная позиция задается равной позиции ΔX2obst, которая отстоит на предварительно определенное расстояние в направлении ширины полосы движения от края полосы движения.
Согласно этой конфигурации, можно реализовывать подавление определения относительно того, должно ли начинаться управление недопущением приближения.
[0122] Данная заявка притязает на приоритет заявки на патент (Япония) № 2011-189504 (поданной 31 августа 2011 года), содержимое которой полностью содержится по ссылке в качестве части этой заявки.
Хотя настоящее изобретение описано в отношении точного числа вариантов осуществления, объем настоящего изобретения не ограничен этим, и улучшения и модификации вариантов осуществления на основе вышеописанного раскрытия сущности являются очевидными для специалистов в данной области техники.
СПИСОК НОМЕРОВ ССЫЛОК
[0123] 8: модуль управления тормозной/движущей силой
19: датчик угла поворота при рулении
21: руль
24L/24R: радары диапазона миллиметровых волн
26: модуль формирования изображений
30: гидравлическая схема
31: навигационное устройство
13: передняя камера.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОМОЩНИК ПРИ ВОЖДЕНИИ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ ПОМОЩИ ПРИ ВОЖДЕНИИ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2492082C1 |
| УСТРОЙСТВО ПОМОЩИ ПРИ ВОЖДЕНИИ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ ПОМОЩИ ПРИ ВОЖДЕНИИ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2492083C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РУЛЕНИЕМ | 2013 |
|
RU2582517C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РУЛЕНИЕМ | 2013 |
|
RU2576553C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РУЛЕНИЕМ | 2013 |
|
RU2581808C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РУЛЕНИЕМ | 2013 |
|
RU2581809C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РУЛЕНИЕМ | 2013 |
|
RU2582012C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ УСТОЙЧИВОСТЬЮ | 2013 |
|
RU2644063C2 |
| СПОСОБ УПРАВЛЕНИЯ ВОЖДЕНИЕМ И УСТРОЙСТВО УПРАВЛЕНИЯ ВОЖДЕНИЕМ | 2017 |
|
RU2727907C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РУЛЕНИЕМ | 2014 |
|
RU2627262C2 |
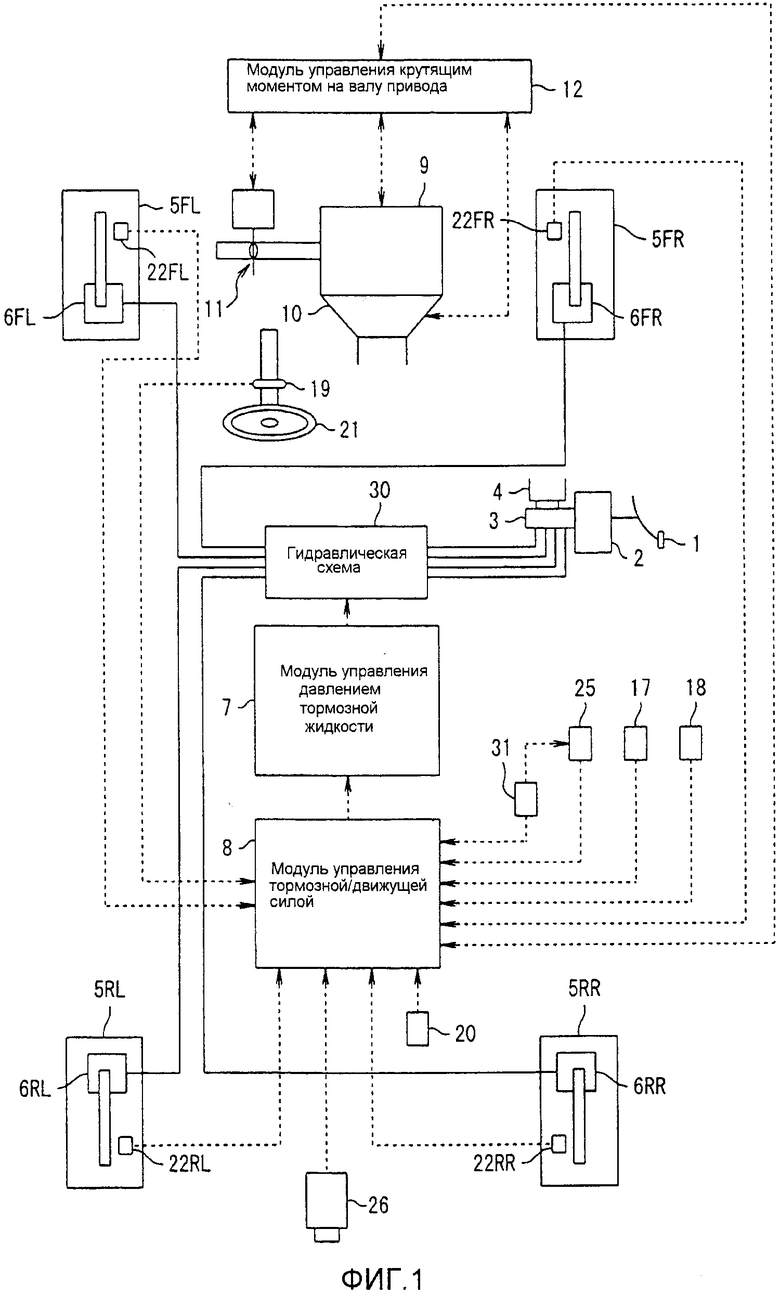
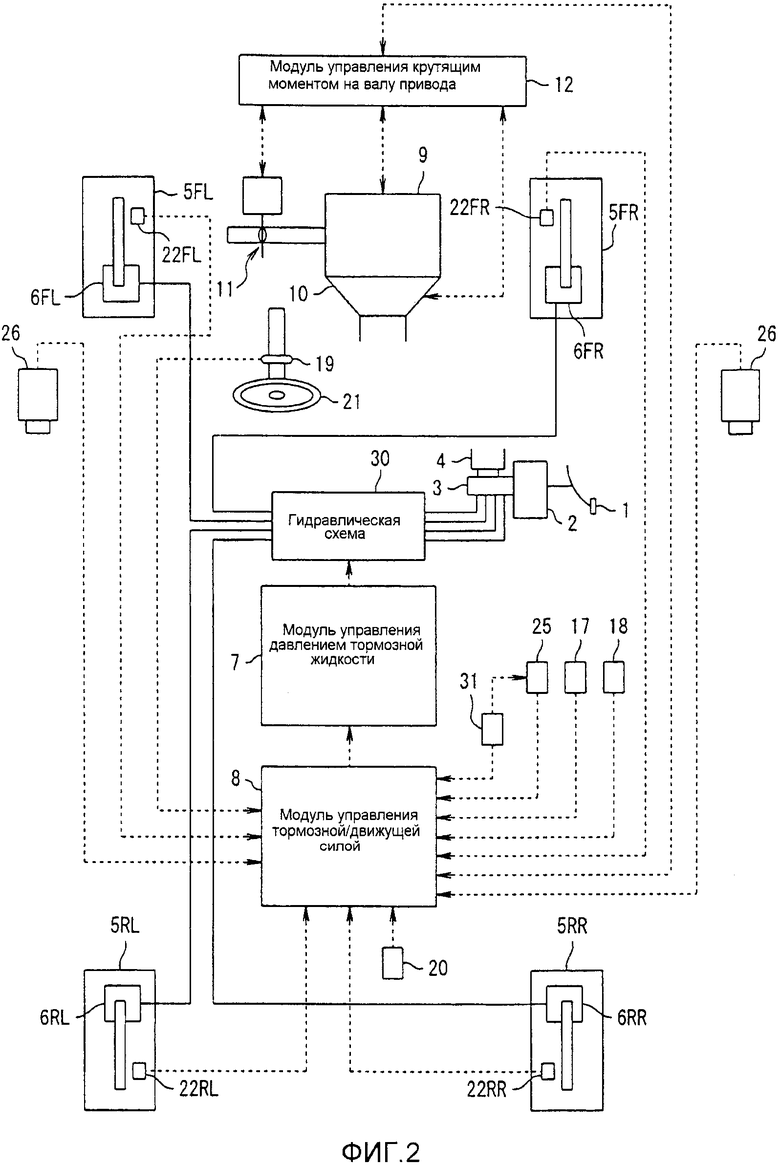
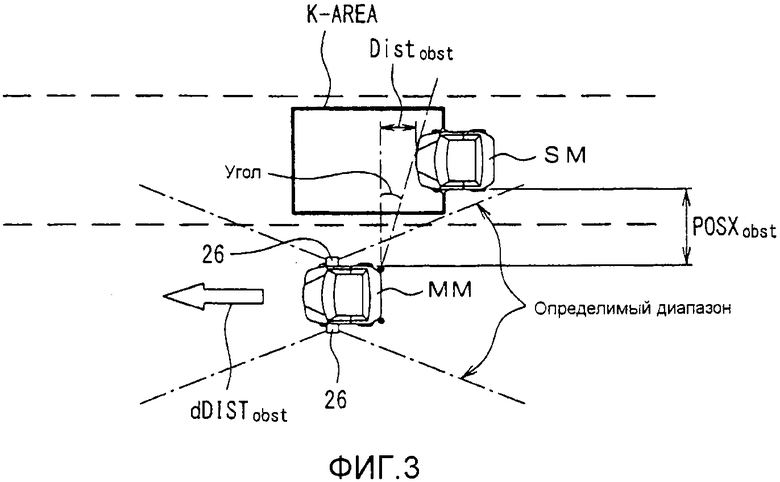
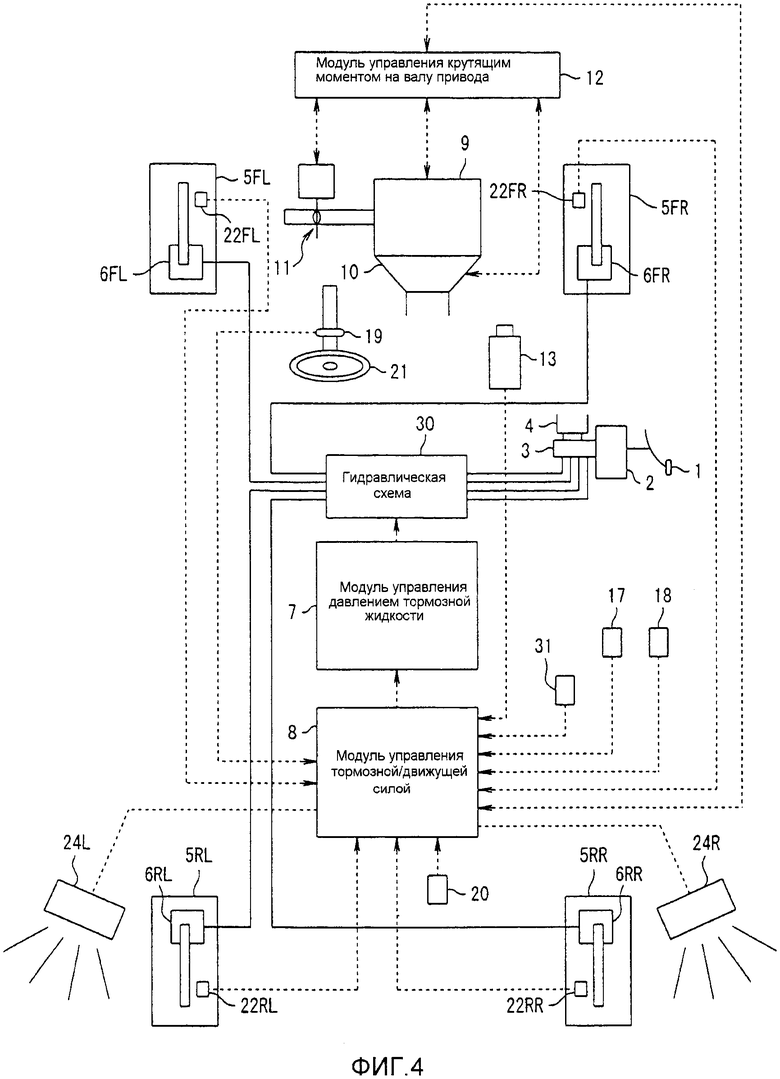
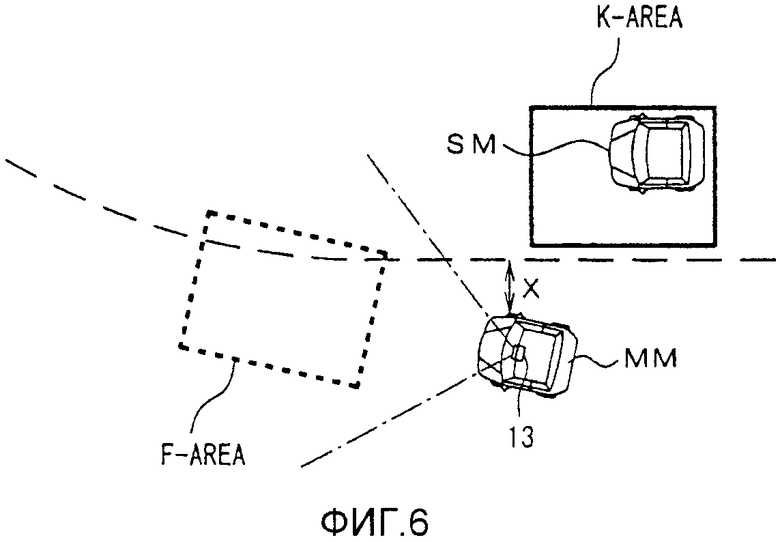
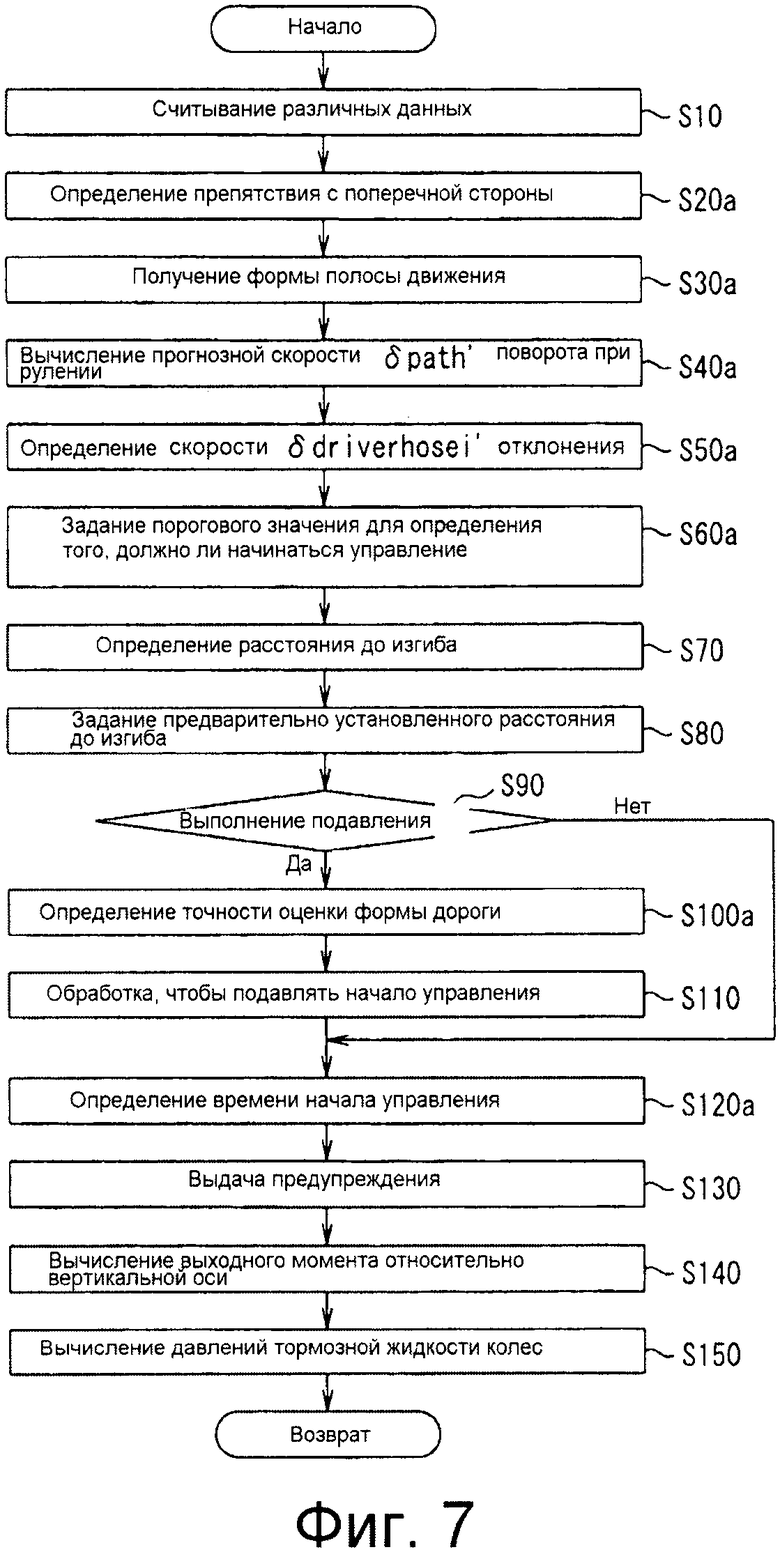
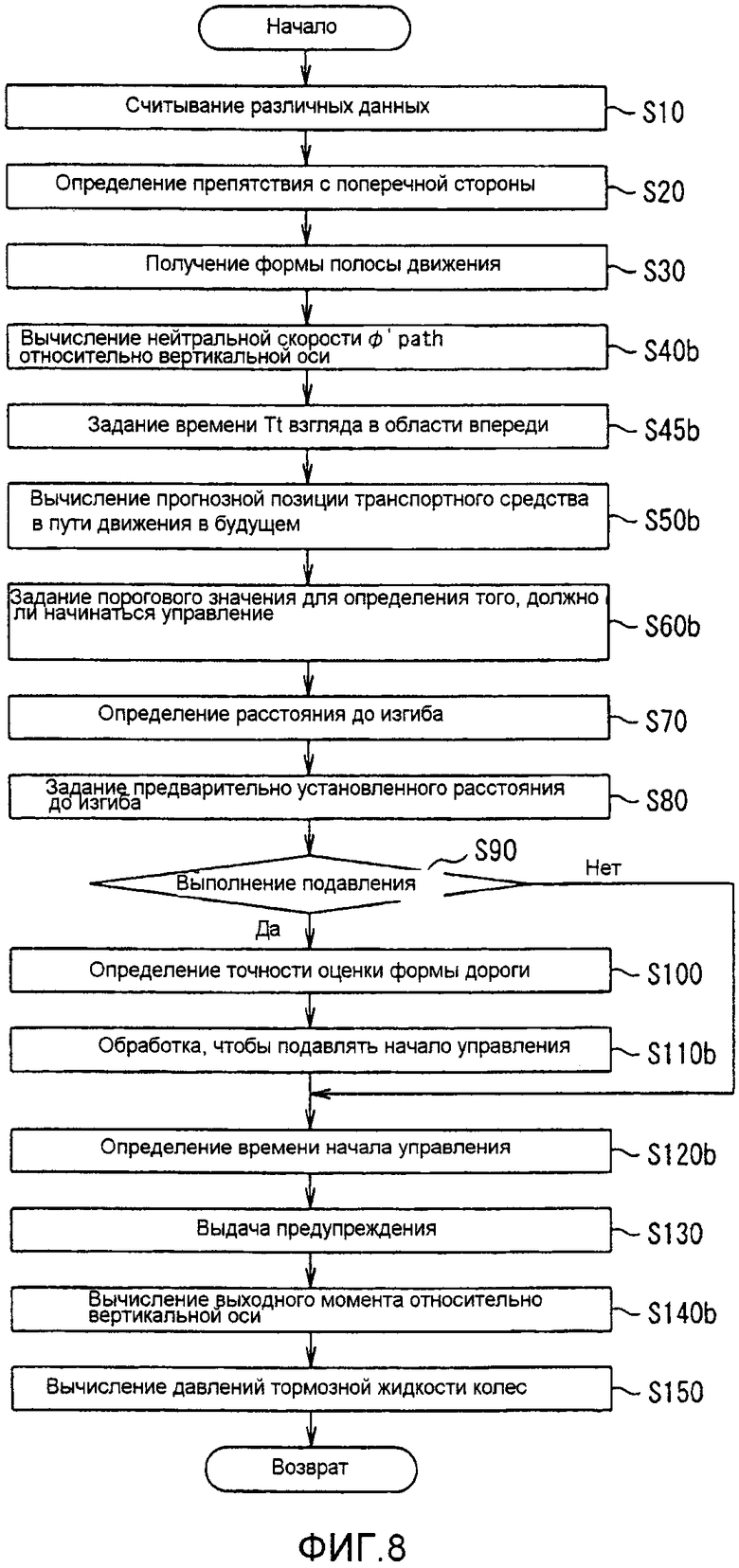
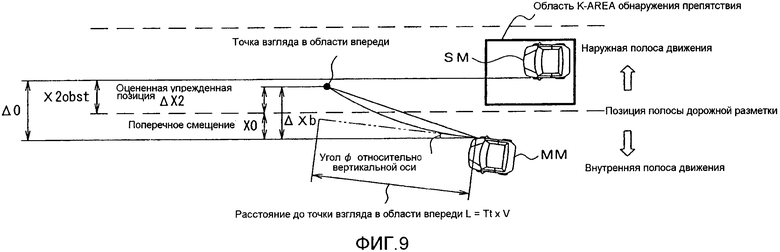
Изобретение относится к области автомобилестроения, а именно к системам управления транспортного средства. Модуль управления тормозной/движущей силой обнаруживает форму дороги впереди транспортного средства и определяет то, имеет ли водитель намерение сменить полосу движения, на основе определенной формы дороги и величины руления, управляемой водителем. Модуль управления определяет препятствие, имеющееся сзади и сбоку от транспортного средства. Модуль управления определяет то, должно ли начинаться управление недопущением приближения для недопущения приближения транспортного средства к препятствию, когда определяется то, что водитель имеет намерение сменить полосу движения, и обнаруживается препятствие, и выполняет управление недопущением приближения для помощи в недопущении приближения транспортного средства к препятствию, когда определяется то, что управление должно начинаться. Модуль управления определяет точность обнаружения формы дороги впереди транспортного средства и подавляет определение начала управления, когда точность обнаружения является низкой. Достигается подавление некомфортного ощущения, возникающего у водителя при вождении. 17 з.п. ф-лы, 9 ил.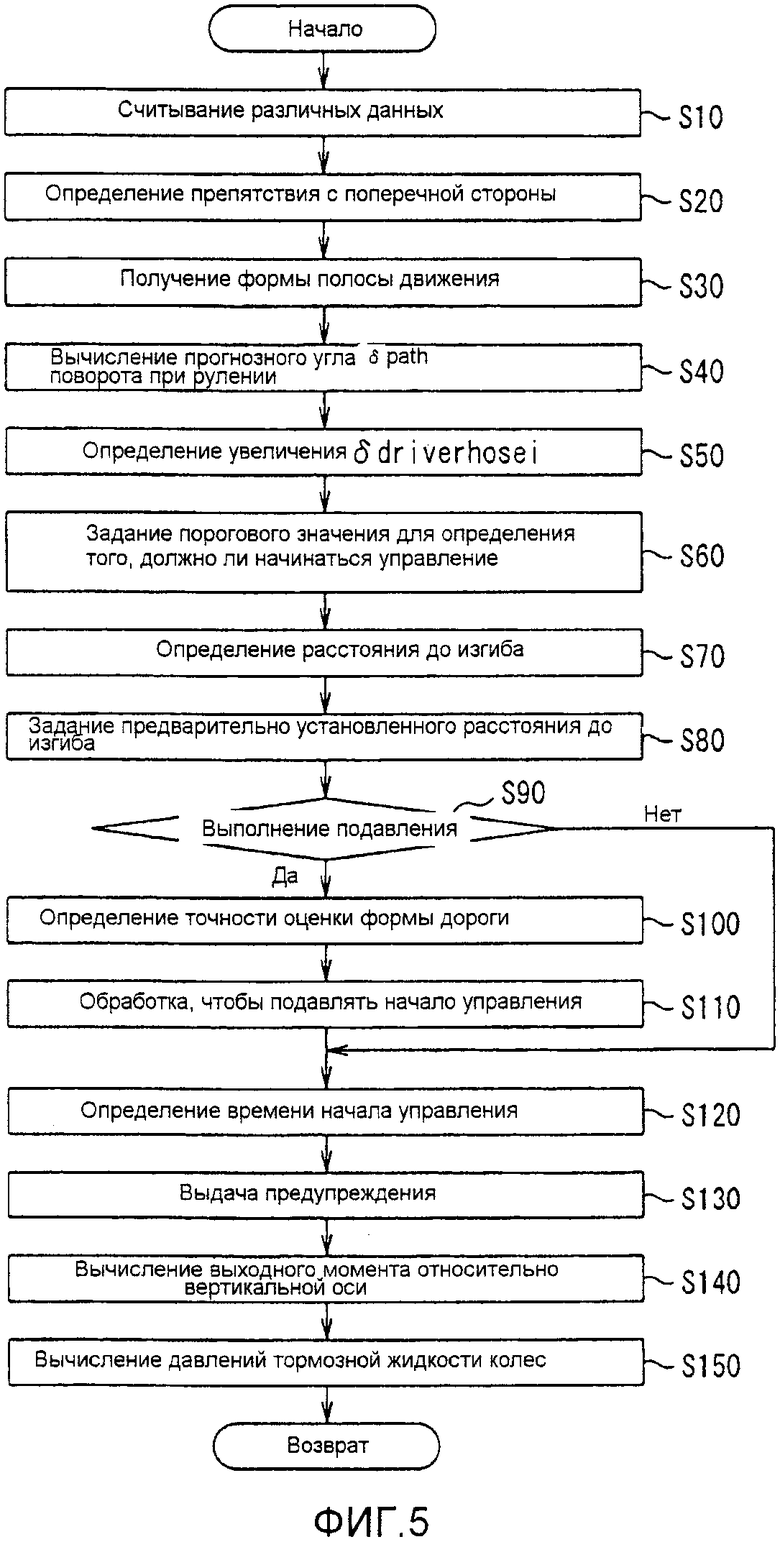
1. Устройство помощи при вождении транспортного средства, содержащее:
- модуль обнаружения формы дороги для обнаружения формы дороги в предварительно установленной области впереди, которая является предварительно определенной областью, заданной перед транспортным средством;
- модуль обнаружения величины руления для обнаружения величины руления в зависимости от рабочей величины поворота руля водителем;
- модуль обнаружения препятствия для обнаружения препятствия, имеющегося в области обнаружения препятствия, включающей в себя, по меньшей мере, область сзади и сбоку от транспортного средства;
- модуль определения намерений водителя для определения того, имеет ли водитель намерение сменить полосу движения, на основе формы дороги, обнаруженной посредством модуля обнаружения формы дороги, и величины руления, обнаруженной посредством модуля обнаружения величины руления;
- модуль определения начала управления для определения того, что управление недопущением приближения для помощи в недопущении приближения транспортного средства к препятствию должно начинаться, когда определяется то, что водитель имеет намерение сменить полосу движения, посредством модуля определения намерений водителя, и обнаруживается препятствие посредством модуля обнаружения препятствия;
- модуль управления недопущением приближения к препятствию для выполнения управления недопущением приближения, когда модуль определения начала управления определяет то, что управление должно начинаться;
- модуль определения точности обнаружения для определения точности обнаружения формы дороги посредством модуля обнаружения формы дороги;
- модуль подавления определения начала для подавления определения модуля определения начала управления в отношении того, должно ли начинаться управление недопущением приближения, когда точность обнаружения, определенная посредством модуля определения точности обнаружения, ниже предварительно определенного порогового значения точности; и
- модуль вычисления прогнозного угла поворота при рулении для вычисления прогнозного угла поворота при рулении, который является углом поворота при рулении, необходимым для движения вдоль формы дороги, обнаруженной посредством модуля обнаружения формы дороги,
- при этом модуль обнаружения величины руления обнаруживает фактический угол поворота при рулении, который является углом поворота при рулении руля, в качестве величины руления, и
- при этом модуль определения намерений водителя определяет то, что водитель имеет намерение сменить полосу движения, когда угол отклонения между фактическим углом поворота при рулении, обнаруженным посредством модуля обнаружения величины руления, и прогнозным углом поворота при рулении, прогнозированным посредством модуля вычисления прогнозного угла поворота при
рулении, равен или превышает предварительно установленный угол отклонения.
2. Устройство помощи при вождении транспортного средства по п. 1, в котором модуль подавления определения начала подавляет определение модуля определения начала управления в отношении того, должно ли начинаться управление недопущением приближения, посредством изменения значения предварительно установленного угла отклонения на большее значение.
3. Устройство помощи при вождении транспортного средства по п. 1, дополнительно содержащее модуль вычисления прогнозной скорости руления для вычисления прогнозной скорости руления, которая является скоростью руления, необходимой для движения вдоль формы дороги, обнаруженной посредством модуля обнаружения формы дороги,
- при этом модуль обнаружения величины руления обнаруживает фактическую скорость руления, которая является скоростью руления руля в качестве величины руления, и
- при этом модуль определения намерений водителя определяет то, что водитель имеет намерение сменить полосу движения, когда скорость отклонения между фактической скоростью руления, обнаруженной посредством модуля обнаружения величины руления, и прогнозной скоростью руления, вычисленной посредством модуля вычисления прогнозной скорости руления, равна или превышает предварительно установленную скорость отклонения.
4. Устройство помощи при вождении транспортного средства по п. 3, в котором модуль подавления определения начала подавляет определение модуля определения начала управления в отношении
того, должно ли начинаться управление недопущением приближения, посредством изменения значения предварительно установленной скорости отклонения на большее значение.
5. Устройство помощи при вождении транспортного средства по п. 1, в котором модуль обнаружения величины руления обнаруживает прогнозную поперечную позицию, которая является поперечной позицией транспортного средства в направлении ширины полосы движения, в которой, как прогнозируется, должно находиться транспортное средство после того, как проходит предварительно установленное время, в качестве величины руления на основе рабочей величины поворота руля водителем, и формы дороги, обнаруженной посредством модуля обнаружения формы дороги, и
- при этом модуль определения намерений водителя определяет то, что водитель имеет намерение сменить полосу движения, когда прогнозная поперечная позиция, обнаруженная посредством модуля обнаружения величины руления, находится за пределами предварительно установленной поперечной позиции в направлении ширины полосы движения, причем предварительно установленная поперечная позиция представляет собой предварительно определенную позицию, заданную в направлении ширины полосы движения.
6. Устройство помощи при вождении транспортного средства по п. 5, в котором модуль подавления определения начала подавляет определение модуля определения начала управления в отношении того, должно ли начинаться управление недопущением приближения, посредством изменения предварительно установленной поперечной позиции в направлении ширины полосы движения на внешнюю позицию
в направлении ширины полосы движения.
7. Устройство помощи при вождении транспортного средства по п. 5, дополнительно содержащее модуль обнаружения позиции препятствия для обнаружения позиции препятствия относительно транспортного средства в направлении ширины полосы движения, причем препятствие обнаруживается посредством модуля обнаружения препятствия,
- при этом предварительно установленная поперечная позиция задается равной позиции препятствия относительно транспортного средства в направлении ширины полосы движения, причем препятствие обнаруживается посредством модуля обнаружения позиции препятствия.
8. Устройство помощи при вождении транспортного средства по п. 5, в котором предварительно установленная поперечная позиция задается равной позиции, отстоящей на предварительно определенное расстояние в направлении ширины полосы движения от текущей поперечной позиции, которая является текущей позицией транспортного средства в направлении ширины полосы движения.
9. Устройство помощи при вождении транспортного средства по п. 5, в котором предварительно установленная поперечная позиция задается равной позиции, отстоящей на предварительно определенное расстояние в направлении ширины полосы движения от края полосы движения.
10. Устройство помощи при вождении транспортного средства по п. 1, в котором модуль подавления определения начала подавляет определение модуля определения начала управления в отношении того, должно ли начинаться управление недопущением приближения,
посредством сужения области обнаружения препятствия.
11. Устройство помощи при вождении транспортного средства по п. 1, дополнительно содержащее навигационное устройство,
- при этом модуль обнаружения формы дороги обнаруживает форму дороги в предварительно установленной области впереди на основе множества узлов, имеющихся в позициях на карте, соответствующих предварительно установленной области впереди, которая задается перед транспортным средством в картографической информации навигационного устройства, и
- при этом модуль определения точности обнаружения определяет то, что точность обнаружения формы дороги посредством модуля обнаружения формы дороги становится ниже по мере того, как пространства между множеством узлов становятся большими.
12. Устройство помощи при вождении транспортного средства по п. 1, дополнительно содержащее навигационное устройство,
- при этом модуль обнаружения формы дороги обнаруживает форму дороги в предварительно установленной области впереди на основе множества узлов, имеющихся в позициях на карте, соответствующих предварительно установленной области впереди, которая задается перед транспортным средством в картографической информации навигационного устройства, и
- при этом модуль определения точности обнаружения вычисляет аппроксимирующую кривую множества узлов и определяет то, что точность обнаружения формы дороги посредством модуля обнаружения формы дороги становится ниже по мере того, как дисперсия расстояний множества узлов до аппроксимирующей кривой становится большей.
13. Устройство помощи при вождении транспортного средства по п. 1, дополнительно содержащее:
- модуль формирования изображений спереди для формирования изображений предварительно установленной области впереди, заданной перед транспортным средством; и
- модуль извлечения точек краев для обработки изображения, захваченного посредством модуля формирования изображений спереди, и для извлечения множества точек краев для указания разделительной линии полосы движения, имеющейся в предварительно установленной области впереди,
- при этом модуль обнаружения формы дороги обнаруживает форму дороги в предварительно установленной области впереди перед транспортным средством на основе множества точек краев, извлеченных посредством модуля извлечения точек краев, и
- при этом модуль определения точности обнаружения определяет то, что точность обнаружения формы дороги посредством модуля обнаружения формы дороги становится ниже по мере того, как число точек краев, извлеченных посредством модуля извлечения точек краев, становится меньшим.
14. Устройство помощи при вождении транспортного средства по п. 1, дополнительно содержащее:
- модуль формирования изображений спереди для формирования изображений предварительно установленной области впереди, заданной перед транспортным средством; и
- модуль извлечения точек краев для обработки изображения, захваченного посредством модуля формирования изображений спереди, и для извлечения множества точек краев для указания
разделительной линии полосы движения, имеющейся в предварительно установленной области впереди,
- при этом модуль обнаружения формы дороги обнаруживает форму дороги в предварительно установленной области впереди перед транспортным средством на основе множества точек краев, извлеченных посредством модуля извлечения точек краев, и
- при этом модуль определения точности обнаружения вычисляет аппроксимирующую кривую множества точек краев и определяет то, что точность обнаружения формы дороги посредством модуля обнаружения формы дороги становится ниже по мере того, как дисперсия расстояний множества точек краев до аппроксимирующей кривой становится большей.
15. Устройство помощи при вождении транспортного средства по п. 1, дополнительно содержащее модуль обнаружения расстояния до изгиба для обнаружения расстояния до изгиба, которое является расстоянием от текущей позиции транспортного средства до начальной позиции искривленной дороги впереди в направлении движения транспортного средства,
- при этом модуль подавления определения начала подавляет определение модуля определения начала управления в отношении того, должно ли начинаться управление недопущением приближения только тогда, когда расстояние до изгиба, обнаруженное посредством модуля обнаружения расстояния до изгиба, равно или меньше предварительно установленного расстояния до изгиба.
16. Устройство помощи при вождении транспортного средства по п. 15, дополнительно содержащее:
- модуль позиционирования транспортного средства для
обнаружения позиции транспортного средства; и
- модуль обнаружения точности позиционирования для определения точности обнаружения позиции транспортного средства посредством модуля позиционирования транспортного средства,
- при этом модуль обнаружения расстояния до изгиба обнаруживает расстояние до изгиба на основе позиции транспортного средства, обнаруженной посредством модуля позиционирования транспортного средства, и
- при этом модуль подавления определения начала задает расстояние до изгиба большим по мере того, как становится ниже точность обнаружения, обнаруживаемая посредством модуля обнаружения точности позиционирования.
17. Устройство помощи при вождении транспортного средства по п. 1, в котором модуль обнаружения формы дороги обнаруживает кривизну дороги в качестве формы дороги.
18. Устройство помощи при вождении транспортного средства по п. 1, в котором управление недопущением приближения представляет собой по меньшей мере одно из управления уведомлением водителю и управления заданием момента относительно вертикальной оси в противоположном направлении относительно направления смены полосы движения транспортного средства.
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| JP 2011022990 A, 03.02.2011 | |||
| JP 2002205630 A, 23.07.2002 | |||
| Способ термической обоаботки штамповых биметаллических поковок | 1976 |
|
SU585221A1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ АВТОМОБИЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2310922C2 |

