Изобретение относится к радиолокации и может быть использовано для подавления помех при обнаружении сигналов в импульсных радиолокационных станциях. В частности, для подавления смеси помех от неподвижных местных предметов (МП) и движущихся со скоростью ветра природных и искусственных отражателей (движущихся ПП)
Известен способ подавления помех ("Применение цифровой обработки сигналов" под ред Э.Опенгейма, М, "Мир", 1980), в котором из принятых радиолокатором сигналов в N периодах повторения когерентной пачки формируют отсчеты комплексной огибающей, отсчеты в каждом элементе дальности обрабатывают в режекторном фильтре с весовыми коэффициентами W=(w1, w2, …, wN)T, заранее выбранными таким образом, чтобы обеспечить минимальное значение мощности помех на выходе режекторного фильтра. В данном способе обеспечивается подавление некоторых видов пассивных помех, например, помех от неподвижных МП. В этом случае используют биномиальные весовые коэффициенты, находящиеся из выражения  .
.
Существенный недостаток данного способа состоит в низком подавлении смеси помех от МП и движущихся ПП, включающих, например, помехи от метеообразований или сбрасываемых с борта самолета диполей.
Наиболее близким техническим решением является способ подавления помех (Д.И.Попов. Синтез цифровых адаптивных режекторных фильтров. Радиотехника, 1981 г., т.36, №10), в котором из принятых радиолокатором сигналов в N периодах повторения когерентной пачки формируют отсчеты комплексной огибающей, при обработке отсчетов в k-м элементе дальности оценивают матрицу ковариации помех  по отсчетам в Nw элементах дальности, окружающих обрабатываемый k-й элемент, определяют весовые коэффициенты режекторного фильтра W=(w1, w2, …, wN)T из уравнения
по отсчетам в Nw элементах дальности, окружающих обрабатываемый k-й элемент, определяют весовые коэффициенты режекторного фильтра W=(w1, w2, …, wN)T из уравнения

где I - единичная матрица размером N×N, λmin - минимальное собственное значение матрицы  размером N×N, обрабатывают отсчеты k-го элемента дальности в данном режекторном фильтре. В указанном способе обеспечивается подавление разного вида помех, в том числе смеси пассивных помех от неподвижных МП и движущихся ПП При этом достигается минимальное значение мощности смеси помех на выходе режекторного фильтра.
размером N×N, обрабатывают отсчеты k-го элемента дальности в данном режекторном фильтре. В указанном способе обеспечивается подавление разного вида помех, в том числе смеси пассивных помех от неподвижных МП и движущихся ПП При этом достигается минимальное значение мощности смеси помех на выходе режекторного фильтра.
Основной недостаток этого способа заключается в сложности его технической реализации, связанной с тем, что из-за изменения во времени матрицы ковариации смеси помех  необходимо в каждом элементе дальности получать новое решение матричного уравнения (1). Это требует производить порядка ~N3 операций комплексного умножения за время, равное периоду дискретизации комплексной огибающей τd, что для типовых значений N>3 и τd<1 мкс вызывает значительные технические трудности.
необходимо в каждом элементе дальности получать новое решение матричного уравнения (1). Это требует производить порядка ~N3 операций комплексного умножения за время, равное периоду дискретизации комплексной огибающей τd, что для типовых значений N>3 и τd<1 мкс вызывает значительные технические трудности.
Техническим результатом (решаемой задачей) изобретения, таким образом, является устранение названного недостатка, а именно упрощение технической реализации известного способа без снижения подавления смеси помех от неподвижных МП и движущихся ПП.
Технический результат (решаемая задача) в предлагаемом способе достигается тем, что в известном способе подавления помех, представляющих собой смесь помех от неподвижных местных предметов (МП) и движущихся пассивных помех (ПП), в котором из принятых радиолокатором сигналов и помех в N периодах повторения когерентной пачки, где N≥3, формируют отсчеты комплексной огибающей xi,k, где i - номер периода повторения когерентной пачки, 1≤i≤N, k - номер элемента дальности, формируют окно из Nw элементов дальности, окружающих k-й элемент, в котором оценивают корреляционные параметры помех, включая коэффициенты корреляции помех между соседними периодами повторения когерентной пачки, оценки корреляционных параметров помех используют для фильтрации сигналов на фоне смеси помех от МП и ПП, согласно изобретению отсчеты комплексной огибающей xi,k подают на N каналов обработки, причем в j-м канале, где j=1, …, N, при j≥2 их вначале подают на режекторный фильтр подавления помех от неподвижных МП (j-1)-го порядка с биномиальными весовыми коэффициентами  , где m=1, …j, затем из отсчетов zi,k(j) на выходе указанного фильтра формируют упомянутое окно из Nw элементов дальности, окружающих k-й элемент, в котором оценивают упомянутый коэффициент корреляции помех между соседними j-м и j+1-м периодами повторения когерентной пачки
, где m=1, …j, затем из отсчетов zi,k(j) на выходе указанного фильтра формируют упомянутое окно из Nw элементов дальности, окружающих k-й элемент, в котором оценивают упомянутый коэффициент корреляции помех между соседними j-м и j+1-м периодами повторения когерентной пачки  где
где  - соответственно оценки модуля и фазы коэффициента корреляции помех, отсчеты zi,k (j) поворачивают на фазу
- соответственно оценки модуля и фазы коэффициента корреляции помех, отсчеты zi,k (j) поворачивают на фазу  в ρ-м периоде повторения когерентной пачки, где ρ=j, …, N, затем при j≤N-1 их подают на режекторный фильтр подавления помех от движущихся ПП с действительными коэффициентами w2-n, где n=1, …, N-j+1, которые находят из предварительно рассчитанных для подавления ПП с нулевой фазой коэффициента корреляции, гауссовой формой спектра и разных значений модуля коэффициента корреляции ρ0, заданных с точностью Δρ0 в диапазоне от 0 до 1, так, чтобы расчетное значение ρ0 отличалось от полученной оценки
в ρ-м периоде повторения когерентной пачки, где ρ=j, …, N, затем при j≤N-1 их подают на режекторный фильтр подавления помех от движущихся ПП с действительными коэффициентами w2-n, где n=1, …, N-j+1, которые находят из предварительно рассчитанных для подавления ПП с нулевой фазой коэффициента корреляции, гауссовой формой спектра и разных значений модуля коэффициента корреляции ρ0, заданных с точностью Δρ0 в диапазоне от 0 до 1, так, чтобы расчетное значение ρ0 отличалось от полученной оценки 
 нe более чем на величину точности Δρ0, на выходах режекторных фильтров подавления помех от движущихся ПП в N каналах обработки измеряют мощность помех
нe более чем на величину точности Δρ0, на выходах режекторных фильтров подавления помех от движущихся ПП в N каналах обработки измеряют мощность помех  в окне из Np элементов дальности, окружающих k-й элемент, где Np выбирается исходя из допустимого снижения подавления помех, по минимальной оценке мощности помех
в окне из Np элементов дальности, окружающих k-й элемент, где Np выбирается исходя из допустимого снижения подавления помех, по минимальной оценке мощности помех  выбирают канал обработки, выполняющий упомянутую функцию фильтрации сигналов на фоне смеси помех от МП и ПП.
выбирают канал обработки, выполняющий упомянутую функцию фильтрации сигналов на фоне смеси помех от МП и ПП.
Новыми существенными признаками предлагаемого способа являются следующие:
- отсчеты комплексной огибающей x1,k подают на N каналов обработки, причем в j-м канале, где j=1,…,N, при j≥2 их вначале подают на режекторный фильтр подавления помех от неподвижных МП (j-1)-го порядка с биномиальными весовыми коэффициентами , где m=1,…j,
- из отсчетов z1.k (j) на выходе режекторного фильтра подавления помех от неподвижных МП формируют упомянутое окно из Nw элементов дальности, окружающих k-й элемент, в котором оценивают упомянутый коэффициент корреляции помех между соседними j-м и j+1-м периодами повторения когерентной пачки  , где
, где  соответственно оценки модуля и фазы коэффициента корреляции помех;
соответственно оценки модуля и фазы коэффициента корреляции помех;
- отсчеты zi,k(j) поворачивают на фазу  в ρ-м периоде повторения когерентной пачки, где p=j, …,N, затем при j≤N-l их подают на режекторный фильтр подавления помех от движущихся ПП с действительными коэффициентами w2n, где n=1, …, N - j+1,
в ρ-м периоде повторения когерентной пачки, где p=j, …,N, затем при j≤N-l их подают на режекторный фильтр подавления помех от движущихся ПП с действительными коэффициентами w2n, где n=1, …, N - j+1,
- коэффициенты w2n находят из предварительно рассчитанных для подавления ПП с нулевой фазой коэффициента корреляции, гауссовой формой спектра и разных значений модуля коэффициента корреляции ρ0, заданных с точностью Δρ0 в диапазоне от 0 до 1, так, чтобы расчетное значение ρ0 отличалось от полученной оценки  не более чем на величину точности Δρ0;
не более чем на величину точности Δρ0;
- на выходах режекторных фильтров подавления помех от движущихся ПП в N каналах обработки измеряют мощность помех  в окне из Np элементов дальности, окружающих k-ый элемент, где Np выбирается исходя из допустимого снижения подавления помех;
в окне из Np элементов дальности, окружающих k-ый элемент, где Np выбирается исходя из допустимого снижения подавления помех;
- по минимальной оценке мощности помех  выбирают канал обработки, выполняющий упомянутую функцию фильтрации сигналов на фоне смеси помех от МП и ПП.
выбирают канал обработки, выполняющий упомянутую функцию фильтрации сигналов на фоне смеси помех от МП и ПП.
Применение всех новых признаков совместно с признаками прототипа позволит упростить техническую реализацию способа. В прототипе необходимо при обработке сигналов в каждом элементе дальности оценивать всю матрицу ковариации помех  , состоящую в общем случае из
, состоящую в общем случае из  различных элементов. Затем требуется найти решение уравнения (1), для чего необходимо использовать значительные вычислительные ресурсы В предлагаемом способе подавления помех обработка производится в N канальной системе, причем в j-м канале отсчеты комплексной огибающей вначале подают на режекторный фильтр (j-1)-го порядка с биномиальными коэффициентами, в котором производится подавление помех от неподвижных МП. Подавление движущейся ПП в этом режекторном фильтре не обеспечивается, для этого выполняют следующее. На выходе упомянутого режекторного фильтра подавления помех от неподвижных МП в окне дальности, окружающем k-й элемент дальности, измеряют коэффициент корреляции помех
различных элементов. Затем требуется найти решение уравнения (1), для чего необходимо использовать значительные вычислительные ресурсы В предлагаемом способе подавления помех обработка производится в N канальной системе, причем в j-м канале отсчеты комплексной огибающей вначале подают на режекторный фильтр (j-1)-го порядка с биномиальными коэффициентами, в котором производится подавление помех от неподвижных МП. Подавление движущейся ПП в этом режекторном фильтре не обеспечивается, для этого выполняют следующее. На выходе упомянутого режекторного фильтра подавления помех от неподвижных МП в окне дальности, окружающем k-й элемент дальности, измеряют коэффициент корреляции помех  , далее отсчеты zi,k поворачивают таким образом, чтобы компенсировать фазу движущейся ПП
, далее отсчеты zi,k поворачивают таким образом, чтобы компенсировать фазу движущейся ПП  затем подают их на режекторный фильтр (N-j)-го порядка, весовые коэффициенты которого предварительно рассчитывают для подавления ПП с нулевой фазой коэффициента корреляции, гауссовой формой спектра и разных значений модуля коэффициента корреляции ρ0. Из рассчитанных значений весовых коэффициентов выбирают такие, чтобы расчетное значение ρ0 отличалось от полученной оценки
затем подают их на режекторный фильтр (N-j)-го порядка, весовые коэффициенты которого предварительно рассчитывают для подавления ПП с нулевой фазой коэффициента корреляции, гауссовой формой спектра и разных значений модуля коэффициента корреляции ρ0. Из рассчитанных значений весовых коэффициентов выбирают такие, чтобы расчетное значение ρ0 отличалось от полученной оценки  не более чем на величину точности Δρ0. В последнем упомянутом режекторном фильтре обеспечивается подавление движущейся ПП.
не более чем на величину точности Δρ0. В последнем упомянутом режекторном фильтре обеспечивается подавление движущейся ПП.
В зависимости от соотношения мощностей МП и движущейся ПП наибольшее подавление смеси помех обеспечивается в одном из каналов обработки, отличающихся порядком режекторного фильтра подавления МП - 0, …, N-1 и порядком режекторного фильтра подавления движущейся ПП - соответственно, N-1, …, 0. (Режекторный фильтр 0-го порядка представляет собой звено с единичным коэффициентом передачи на всех частотах). Выбор наилучшего канала обработки производится путем сравнения оценок мощности помех в окне дальности на их выходах. Для реализации предложенного способа требуются существенно меньшие вычислительные ресурсы.
Изобретение поясняется чертежами:
- Фиг.1 - Структурная схема устройства, реализующего предлагаемый способ подавления помех.
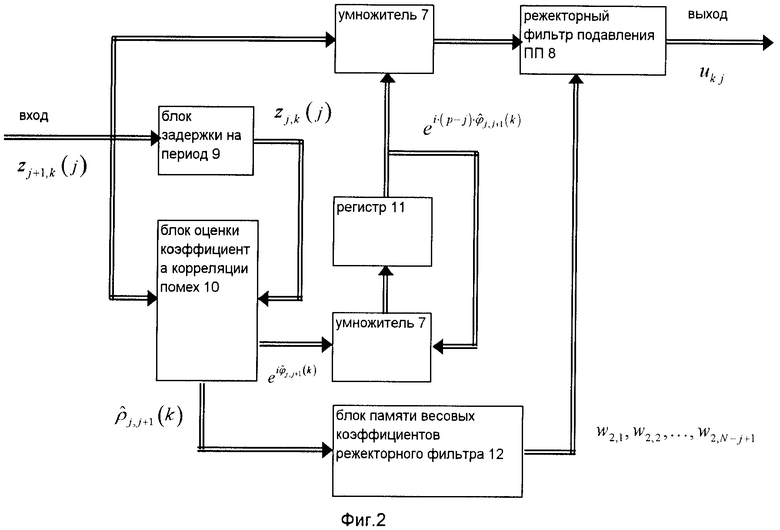
- Фиг.2 - Структурная схема устройства, реализующего адаптивный режекторный фильтр на Фиг.1.
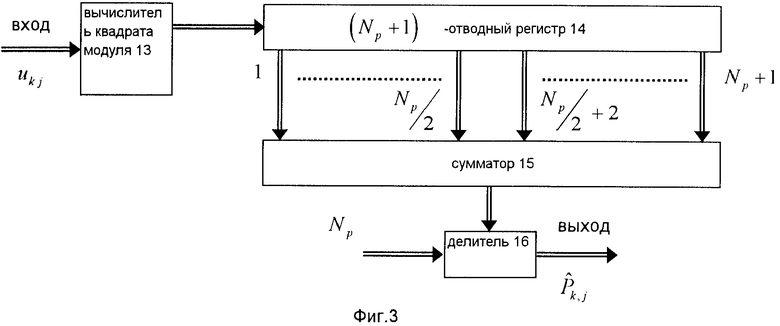
- Фиг.3 - Структурная схема устройства, реализующего измеритель мощности на Фиг.1.
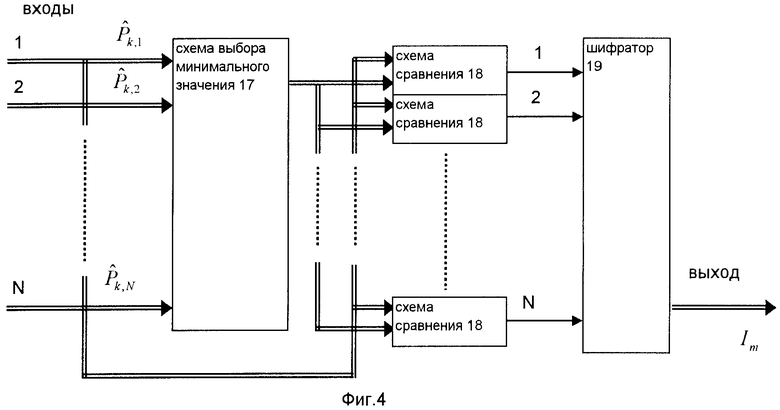
- Фиг.4 - Структурная схема устройства, реализующего блок определения канала с минимальным значением на Фиг.1.
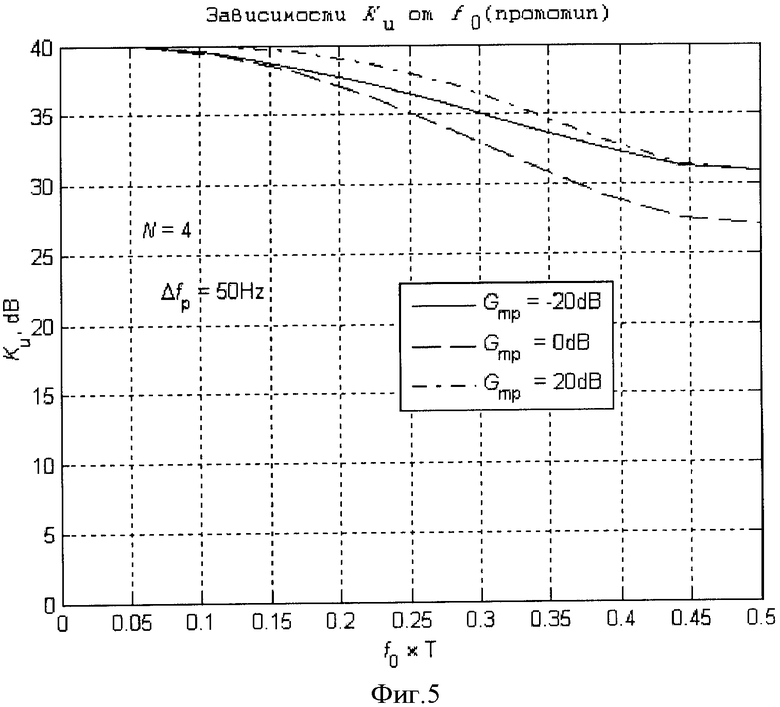
- Фиг.5 - Зависимости коэффициента улучшения отношения сигнал/помеха от частоты Доплера движущейся ПП (прототип).
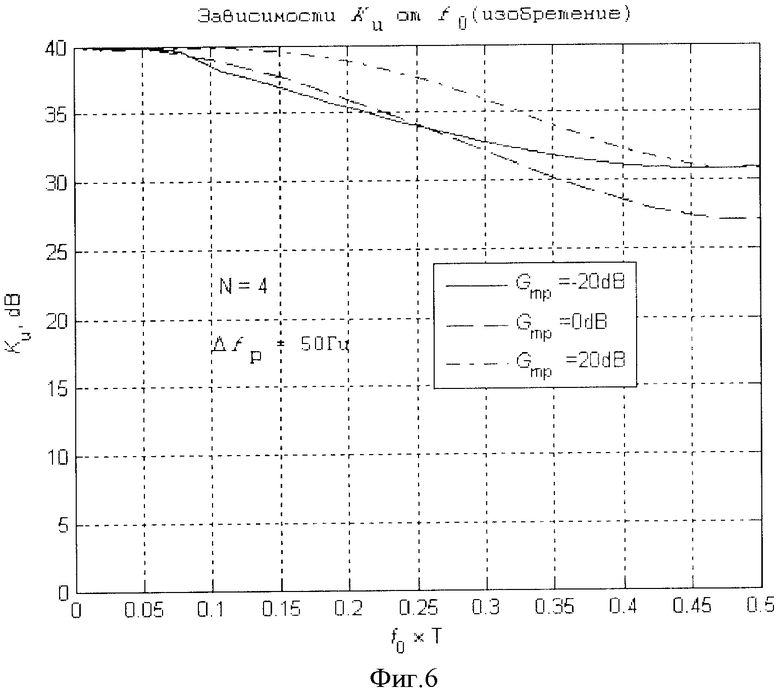
- Фиг.6 - Зависимости коэффициента улучшения отношения сигнал/помеха от частоты Доплера движущейся ПП (изобретение).
Техническая реализация предлагаемого способа подавления помех возможна на основе устройства, показанного на Фиг 1. Устройство содержит формирователь отсчетов комплексной огибающей 1, вход которого является входом устройства, (N-1) режекторных фильтров подавления МП 2, (N-1) адаптивных режекторных фильтров подавления ПП 3, N измерителей мощности 4, блок определения канала с минимальным значением 5, мультиплексор 6, выход которого является выходом устройства.
При этом адаптивный режекторный фильтр подавления ПП 3 выполняет как функции оценки корреляционных параметров ПП в окне дальности, так и функции собственно режекторного фильтра, весовые коэффициенты которого изменяются (перестраиваются) в зависимости от полученных оценок корреляционных параметров ПП.
Техническая реализация адаптивного режекторного фильтра подавления ПП 3 на Фиг.1 возможна в виде устройства, представленного на Фиг.2. Устройство содержит первый умножитель 7, блок задержки на период 9, блок оценки коэффициента корреляции помех 10, входы которых соединены между собой и являются входом устройства, режекторный фильтр подавления ПП 8, выход которого является выходом устройства, регистр 11, второй умножитель 7, блок памяти весовых коэффициентов режекторного фильтра 12.
Техническая реализация измерителя мощности 4 на Фиг.1 возможна в виде устройства, представленного на Фиг.3. Устройство содержит вычислитель квадрата модуля 13, вход которого является входом устройства, (Np+1)-отводный регистр 14, сумматор 15, делитель 16, выход которого является выходом устройства.
Техническая реализация блока определения канала с минимальным значением 5 на Фиг.1 возможна в виде устройства, представленного на Фиг.4. Устройство содержит схему выбора минимального значения 17, N входов которой являются входами устройства, N схем сравнения 18 и шифратор 19, выход которого является выходом устройства.
Устройство на Фиг.1 работает следующим образом. На формирователь отсчетов комплексной огибающей 1 поступают сигналы x(t) с выхода приемного устройства РЛС. С выхода формирователя отсчетов комплексной огибающей 1 отсчеты комплексной огибающей xi,k поступают на N каналов обработки, причем j-й канал (j=1, …, N} состоит из последовательно соединенных режекторного фильтра подавления МП 2 (j-1)-го порядка, адаптивного режекторного фильтра подавления ПП 3 (N-j)-го порядка и измерителя мощности 4. Причем в первом канале обработки режекторный фильтр подавления МП 2 отсутствует и отсчеты комплексной огибающей с выхода формирователя отсчетов комплексной огибающей 1 подаются прямо на адаптивный режекторный фильтр подавления ПП 3, а в N-м канале обработки отсутствует адаптивный режекторный фильтр подавления ПП 3 и отсчеты zi,k с выхода режекторного фильтра подавления МП 2 подаются прямо на измеритель мощности 4. Оценки мощности помех  , полученные с помощью измерителей 4 на выходах адаптивных режекторных фильтров подавления ПП 3, подаются на блок определения канала с минимальным значением 5, с выхода которого снимается и подается на управляющий вход мультиплексора 6 номер канала обработки Im, на выходе которого мощность помех имеет минимальное значение
, полученные с помощью измерителей 4 на выходах адаптивных режекторных фильтров подавления ПП 3, подаются на блок определения канала с минимальным значением 5, с выхода которого снимается и подается на управляющий вход мультиплексора 6 номер канала обработки Im, на выходе которого мощность помех имеет минимальное значение  На N информационных входов мультиплексора 6 подаются сигналы uk,j с выходов адаптивных режекторных фильтров подавления ПП 3 соответствующих каналов обработки. С выхода мультиплексора 6 снимается смесь сигналов и подавленных помех, полученная на выходе адаптивного режекторного фильтра подавления ПП 3 канала обработки jm, в котором обеспечивается наибольшее подавление помех.
На N информационных входов мультиплексора 6 подаются сигналы uk,j с выходов адаптивных режекторных фильтров подавления ПП 3 соответствующих каналов обработки. С выхода мультиплексора 6 снимается смесь сигналов и подавленных помех, полученная на выходе адаптивного режекторного фильтра подавления ПП 3 канала обработки jm, в котором обеспечивается наибольшее подавление помех.
Формирователь отсчетов комплексной огибающей 1 представляет собой устройство, известное, например, из (Я.Д.Ширман, В.Н.Манжос. Теория и техника обработки радиолокационной информации на фоне помех, М., Радио и связь, 1981, 416 с.).
Режекторные фильтры подавления МП 2 представляют собой j-отводные трансверсальные фильтры, известные, например, из (Л.Рабинер, Б.Гоулд. Теория и применение цифровой обработки сигналов, М., "Мир", 1978). Весовые коэффициенты режекторных фильтров подавления МП 2 определяются из выражения  , где m=1, …, j.
, где m=1, …, j.
Устройство на Фиг.2 работает следующим образом. В (j+1)-м периоде повторения когерентной пачки отсчеты zj+1,k(j) с выхода режекторного фильтра подавления МП 2 j-го канала обработки поступают на первый вход блока оценки коэффициента корреляции помех 10, вход блока задержки на период 9 и первый вход первого умножителя 7. Задержанные на период повторения когерентной пачки T отсчеты zj,k(j) с выхода блока задержки на период 9 поступают на второй вход блока оценки коэффициента корреляции помех 10, в котором в окне из Nw элементов дальности, окружающих k-й элемент, оценивают коэффициент корреляции помех между j-м и j+1-м периодами повторения когерентной пачки  . Оценка фазового вектора помех
. Оценка фазового вектора помех  с первого выхода блока оценки коэффициента корреляции помех 10 подается на первый вход второго умножителя 7, на второй вход которого с выхода регистра 11 поступает хранящийся в нем вектор поворота отсчетов по фазе ρ-ом периоде повторения когерентной пачки
с первого выхода блока оценки коэффициента корреляции помех 10 подается на первый вход второго умножителя 7, на второй вход которого с выхода регистра 11 поступает хранящийся в нем вектор поворота отсчетов по фазе ρ-ом периоде повторения когерентной пачки  , где p≥j. С выхода второго умножителя 7 новое значение вектора поворота отсчетов по фазе
, где p≥j. С выхода второго умножителя 7 новое значение вектора поворота отсчетов по фазе  записывается в регистр 11 для использования в следующем (ρ+1)-м периоде повторения когерентной пачки. Вектор поворота отсчетов по фазе в ρ-м периоде повторения когерентной пачки
записывается в регистр 11 для использования в следующем (ρ+1)-м периоде повторения когерентной пачки. Вектор поворота отсчетов по фазе в ρ-м периоде повторения когерентной пачки  с выхода регистра 11 подается на второй вход первого умножителя 7, с выхода которого отсчеты
с выхода регистра 11 подается на второй вход первого умножителя 7, с выхода которого отсчеты  с нулевой после поворота доплеровской фазой ПП подаются на информационный вход режекторного фильтра подавления ПП 8. Оценка модуля коэффициента корреляции помех
с нулевой после поворота доплеровской фазой ПП подаются на информационный вход режекторного фильтра подавления ПП 8. Оценка модуля коэффициента корреляции помех  co второго выхода блока оценки коэффициента корреляции помех 10 подается на вход блока памяти весовых коэффициентов режекторного фильтра 12, с выхода которого весовые коэффициенты режекторного фильтра w2,1, w2,2, …, w2,N-j+1, соответствующие значению
co второго выхода блока оценки коэффициента корреляции помех 10 подается на вход блока памяти весовых коэффициентов режекторного фильтра 12, с выхода которого весовые коэффициенты режекторного фильтра w2,1, w2,2, …, w2,N-j+1, соответствующие значению  , подаются на управляющий вход режекторного фильтра подавления ПП 8. В режекторном фильтре подавления ПП 8 происходит оптимальное подавление движущейся ПП с нулевой доплеровской фазой, гауссовым спектром и модулем коэффициента корреляции
, подаются на управляющий вход режекторного фильтра подавления ПП 8. В режекторном фильтре подавления ПП 8 происходит оптимальное подавление движущейся ПП с нулевой доплеровской фазой, гауссовым спектром и модулем коэффициента корреляции  Смесь сигналов и подавленных помех с выхода режекторного фильтра подавления ПП 8 поступает на выход данного устройства.
Смесь сигналов и подавленных помех с выхода режекторного фильтра подавления ПП 8 поступает на выход данного устройства.
В блоке оценки коэффициента корреляции помех 10, известного, например, из (Д.И.Попов. Синтез цифровых адаптивных режекторных фильтров. Радиотехника, 1981 г., т.36, №10), определяется оценка коэффициента корреляции между отсчетами комплексной огибающей j-го и (j+1)-го периодов пачки повторения когерентной пачки по следующей формуле для j-го канала обработки:
Режекторный фильтр подавления ПП 8 аналогичен режекторному фильтру подавления МП 2 с постоянными весовыми коэффициентами, реализация которого известна, за исключением наличия управляющего входа, по которому передаются значения используемых в данный момент времени весовых коэффициентов трансверсального фильтра w2,1, w2,2, …, w2,N-j+1.
Устройство на Фиг.3 работает следующим образом. На вычислитель квадрата модуля 13 поступают сигналы uk,j c выхода адаптивного режекгорного фильтра подавления ПП 3. Далее с выхода вычислителя квадрата модуля 13 значения |uk,j|2 записываются в (Np+1)-отводный регистр 14, с  отводов которого сигналы подаются на сумматор 15 и далее на первый вход делителя 16, на второй вход которого подается коэффициент Np. Величина среднего значения квадратов модулей сигналов
отводов которого сигналы подаются на сумматор 15 и далее на первый вход делителя 16, на второй вход которого подается коэффициент Np. Величина среднего значения квадратов модулей сигналов  с выхода делителя 16 подается на выход данного устройства.
с выхода делителя 16 подается на выход данного устройства.
Устройство на Фиг.4 работает следующим образом. Оценки мощности помех  с выхода измерителей мощности 4 поступают на 1,…,N входы схемы выбора минимального значения 17 и первые входы N схем сравнения 18. Минимальная оценка мощности помех
с выхода измерителей мощности 4 поступают на 1,…,N входы схемы выбора минимального значения 17 и первые входы N схем сравнения 18. Минимальная оценка мощности помех  с выхода схемы выбора минимального значения 17 подается на вторые входы N схем сравнения 18. На выходах схем сравнения 18 единичный уровень появляется при равенстве входных сигналов, то есть при
с выхода схемы выбора минимального значения 17 подается на вторые входы N схем сравнения 18. На выходах схем сравнения 18 единичный уровень появляется при равенстве входных сигналов, то есть при  , в противном случае формируется нулевой уровень. С выходов N схем сравнения 18 логические сигналы подаются на 1, 2, …, N входы шифратора 19, на выходе которого формируется число, равное номеру входа с единичным логическим уровнем, в данном случае это номер Im.
, в противном случае формируется нулевой уровень. С выходов N схем сравнения 18 логические сигналы подаются на 1, 2, …, N входы шифратора 19, на выходе которого формируется число, равное номеру входа с единичным логическим уровнем, в данном случае это номер Im.
Расчеты характеристик предлагаемого способа подавления помех проводились методом статистического моделирования в среде программы MatLab v.7. На Фиг.5 для прототипа показаны зависимости коэффициента улучшения отношения сигнал/помеха Кu от значения центральной частоты спектра движущейся ПП ƒ0, умноженного на период повторения когерентной пачки Т (ƒ0×T), для разных значений отношения мощностей МП и движущейся ПП Gmp. Число импульсов когерентной пачки N=4, ширина спектра движущейся ПП Δƒ=50 Гц. Аналогичные зависимости для изобретения показаны на Фиг.6. Значения коэффициента улучшения отношения сигнал/помеха Кu изобретения, характеризующего степень подавления помех, близки к значениям прототипа.
Таким образом, использование предлагаемого изобретения позволит решить поставленную задачу с получением технического результата, который заключается в упрощении технической реализации известного способа без снижения подавления смеси помех от неподвижных МП и движущихся ПП.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОДАВЛЕНИЯ ПОМЕХ | 2009 |
|
RU2413238C1 |
| СПОСОБ ПОДАВЛЕНИЯ ПОМЕХ | 2009 |
|
RU2420754C2 |
| СПОСОБ ИЗМЕРЕНИЯ МЕЖДУПЕРИОДНОГО КОЭФФИЦИЕНТА КОРРЕЛЯЦИИ ПАССИВНЫХ ПОМЕХ | 2009 |
|
RU2419809C1 |
| АДАПТИВНЫЙ РЕЖЕКТОРНЫЙ ФИЛЬТР | 2017 |
|
RU2660645C1 |
| РЕЖЕКТОРНЫЙ ФИЛЬТР | 2021 |
|
RU2759150C1 |
| Способ адаптивной обработки сигналов в обзорных когерентно-импульсных радиолокационных станциях | 2019 |
|
RU2704789C1 |
| РЕЖЕКТОРНЫЙ ФИЛЬТР | 2024 |
|
RU2825253C1 |
| АДАПТИВНЫЙ РЕЖЕКТОРНЫЙ ФИЛЬТР | 2015 |
|
RU2579998C1 |
| ВЫЧИСЛИТЕЛЬ ДЛЯ РЕЖЕКТОРНОЙ ФИЛЬТРАЦИИ ПОМЕХ | 2017 |
|
RU2686633C1 |
| ВЫЧИСЛИТЕЛЬ ДЛЯ РЕЖЕКТОРНОЙ ФИЛЬТРАЦИИ ПОМЕХ | 2017 |
|
RU2686634C1 |
Изобретение относится к радиолокации и может быть использовано для подавления помех при обнаружении сигналов в импульсных радиолокационных станциях. Достигаемый технический результат - упрощение технической реализации известного способа без снижения подавления смеси помех от неподвижных местных предметов (МП) и движущихся пассивных помех (ПП). Для достижения технического результата в известном способе подавления помех, представляющих собой смесь помех от неподвижных местных предметов (МП) и движущихся пассивных помех (ПП), в котором из принятых радиолокатором сигналов и помех в N периодах повторения когерентной пачки, где N≥3, формируют отсчеты комплексной огибающей хi,k, где i - номер периода повторения когерентной пачки, 1≤i≤N, k - номер элемента дальности, формируют окно из Nu элементов дальности, окружающих k-й элемент, в котором оценивают корреляционные параметры помех, включая коэффициенты корреляции помех между соседними периодами повторения когерентной пачки, оценки корреляционных параметров помех используют для фильтрации сигналов на фоне смеси помех от МП и ПП, выполняют следующее: отсчеты комплексной огибающей хi,k подают на N каналов обработки, причем в j-м канале, где j=1, …, N, при j≥2 их вначале подают на режекторный фильтр подавления помех от неподвижных МП (j-1)-го порядка с биномиальными весовыми коэффициентами  , где m=1, …, j, затем из отсчетов zi,k(j) на выходе указанного фильтра формируют упомянутое окно из Nw элементов дальности, окружающих k-й элемент, в котором оценивают упомянутый коэффициент корреляции помех между соседними j-м и j+1-м периодами повторения когерентной пачки
, где m=1, …, j, затем из отсчетов zi,k(j) на выходе указанного фильтра формируют упомянутое окно из Nw элементов дальности, окружающих k-й элемент, в котором оценивают упомянутый коэффициент корреляции помех между соседними j-м и j+1-м периодами повторения когерентной пачки  , где
, где  - соответственно оценки модуля и фазы коэффициента корреляции помех, отсчеты zi,k (j) поворачивают на фазу
- соответственно оценки модуля и фазы коэффициента корреляции помех, отсчеты zi,k (j) поворачивают на фазу 
 в ρ-м периоде повторения когерентной пачки, где ρ=j, …, N, таким образом, чтобы компенсировать фазу движущейся ПП, затем при j≤N-1 эти отсчеты подают на режекторный фильтр подавления помех от движущихся ПП с действительными коэффициентами w2n, где n=1, …, N-j+1, которые находят из предварительно рассчитанных для подавления ПП с нулевой фазой коэффициента корреляции, гауссовой формой спектра и разных значений модуля коэффициента корреляции ρ0, заданных с точностью Δρ0 в диапазоне от 0 до 1, так, чтобы расчетное значение ρ0 отличалось от полученной оценки
в ρ-м периоде повторения когерентной пачки, где ρ=j, …, N, таким образом, чтобы компенсировать фазу движущейся ПП, затем при j≤N-1 эти отсчеты подают на режекторный фильтр подавления помех от движущихся ПП с действительными коэффициентами w2n, где n=1, …, N-j+1, которые находят из предварительно рассчитанных для подавления ПП с нулевой фазой коэффициента корреляции, гауссовой формой спектра и разных значений модуля коэффициента корреляции ρ0, заданных с точностью Δρ0 в диапазоне от 0 до 1, так, чтобы расчетное значение ρ0 отличалось от полученной оценки  не более чем на величину точности Δρ0, на выходах режекторных фильтров подавления помех от движущихся ПП в N каналах обработки измеряют мощность помех
не более чем на величину точности Δρ0, на выходах режекторных фильтров подавления помех от движущихся ПП в N каналах обработки измеряют мощность помех  в окне из N элементов дальности, окружающих k-й элемент, где N выбирается исходя из допустимого снижения подавления помех, по минимальной оценке мощности помех
в окне из N элементов дальности, окружающих k-й элемент, где N выбирается исходя из допустимого снижения подавления помех, по минимальной оценке мощности помех  канал обработки, выполняющий упомянутую функцию фильтрации сигналов на фоне смеси помех от МП и ПП, выбирают как выходной канал. 6 ил.
канал обработки, выполняющий упомянутую функцию фильтрации сигналов на фоне смеси помех от МП и ПП, выбирают как выходной канал. 6 ил.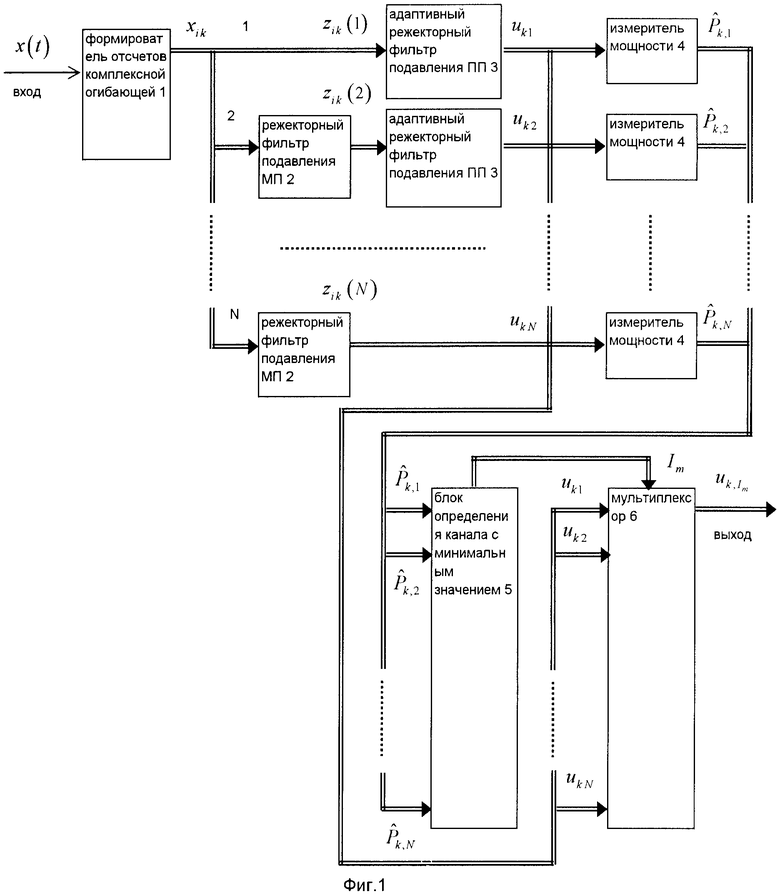
Способ подавления помех, представляющих собой смесь помех от неподвижных местных предметов (МП) и движущихся пассивных помех (ПП), в котором из принятых радиолокатором сигналов и помех в N периодах повторения когерентной пачки, где N≥3, формируют отсчеты комплексной огибающей хi,k, где i - номер периода повторения когерентной пачки, 1≤i≤N, k - номер элемента дальности, формируют окно из Nw элементов дальности, окружающих k-й элемент, в котором оценивают корреляционные параметры помех, включая коэффициенты корреляции помех между соседними периодами повторения когерентной пачки, оценки корреляционных параметров помех используют для фильтрации сигналов на фоне смеси помех от МП и ПП, отличающийся тем, что отсчеты комплексной огибающей хi,k подают на N каналов обработки, причем в j-м канале, где j=1, …, N, при j≥1 их вначале подают на режекторный фильтр подавления помех от неподвижных МП (j-1)-го порядка с биномиальными весовыми коэффициентами  , где m=1, …j, затем из отсчетов zi,k(j) на выходе указанного фильтра формируют упомянутое окно из Nw, элементов дальности, окружающих k-й элемент, в котором оценивают упомянутый коэффициент корреляции помех между соседними j-м и j+1-м периодами повторения когерентной пачки
, где m=1, …j, затем из отсчетов zi,k(j) на выходе указанного фильтра формируют упомянутое окно из Nw, элементов дальности, окружающих k-й элемент, в котором оценивают упомянутый коэффициент корреляции помех между соседними j-м и j+1-м периодами повторения когерентной пачки  где
где  - соответственно, оценки модуля и фазы коэффициента корреляции помех, отсчеты zi,k(j) поворачивают на фазу
- соответственно, оценки модуля и фазы коэффициента корреляции помех, отсчеты zi,k(j) поворачивают на фазу  в р-м периоде повторения когерентной пачки, где р=j, …, N, чтобы компенсировать фазу движущейся ПП, затем при j≤N-1 эти же отсчеты подают на режекторный фильтр подавления помех от движущихся ПП этого же канала с действительными коэффициентами w2n, где n=1, …, N-j+1, которые находят из предварительно рассчитанных для подавления ПП с нулевой фазой коэффициента корреляции, гауссовой формой спектра и разных значений модуля коэффициента корреляции ρ0, заданных с точностью Δρ0 в диапазоне от 0 до 1, так, чтобы расчетное значение ρ0 отличалось от полученной оценки
в р-м периоде повторения когерентной пачки, где р=j, …, N, чтобы компенсировать фазу движущейся ПП, затем при j≤N-1 эти же отсчеты подают на режекторный фильтр подавления помех от движущихся ПП этого же канала с действительными коэффициентами w2n, где n=1, …, N-j+1, которые находят из предварительно рассчитанных для подавления ПП с нулевой фазой коэффициента корреляции, гауссовой формой спектра и разных значений модуля коэффициента корреляции ρ0, заданных с точностью Δρ0 в диапазоне от 0 до 1, так, чтобы расчетное значение ρ0 отличалось от полученной оценки  не более чем на величину точности Δρ0, на выходах режекторных фильтров подавления помех от движущихся ПП в N каналах обработки измеряют мощность помех
не более чем на величину точности Δρ0, на выходах режекторных фильтров подавления помех от движущихся ПП в N каналах обработки измеряют мощность помех  в окне из Np элементов дальности, окружающих k-й элемент, где Np выбирается, исходя из допустимого снижения подавления помех, по минимальной оценке мощности помех
в окне из Np элементов дальности, окружающих k-й элемент, где Np выбирается, исходя из допустимого снижения подавления помех, по минимальной оценке мощности помех  , при этом канал обработки, выполняющий упомянутую функцию фильтрации сигналов на фоне смеси помех от МП и ПП и обеспечивающий наибольшее подавление помех, выбирают как выходной канал.
, при этом канал обработки, выполняющий упомянутую функцию фильтрации сигналов на фоне смеси помех от МП и ПП и обеспечивающий наибольшее подавление помех, выбирают как выходной канал.
| ПОПОВ Д.И | |||
| Синтез цифровых адаптивных режекторных фильтров | |||
| Радиотехника, 1981, т.36, №10 | |||
| SU 1827033 A3, 07.07.1993 | |||
| Адаптивное устройство защиты от пассивных помех | 1991 |
|
SU1808131A3 |
| УСТРОЙСТВО ДЛЯ ПОДАВЛЕНИЯ ПАССИВНЫХ ПОМЕХ | 1980 |
|
SU875960A2 |
| СПОСОБ ОБРАБОТКИ СИГНАЛОВ НА ФОНЕ СИЛЬНЫХ ИМПУЛЬСНЫХ ПОМЕХ В ПРИЕМНОМ КАНАЛЕ ИМПУЛЬСНО-ДОПЛЕРОВСКИХ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ | 2007 |
|
RU2334247C1 |
| US 4965581 A, 23.10.1990 | |||
| WO 03023438 A2, 20.03.2003 | |||
| US 6236353 B1, 22.05.2001 | |||
| Поводковый патрон | 1985 |
|
SU1348078A1 |

