Изобретение относится к устройствам автоматического дозирования флотореагентов и других жидких компонентов в технологический процесс и может быть использовано в области обогащения руд полезных ископаемых, а также в горнометаллургической, строительной и других отраслях промышленности.
Известен дозатор флотационных реагентов (Каталог продукции ООО «Твэлл». Дозаторы флотационных реагентов серии 8200-01. Электронный ресурс: http://http://www.twellgroup.ru/dosage_reagents.html), содержащий магнитоиндукционный расходомер, сегментный клапан с пневматическим приводом, арматуру для промывки и калибровки. Дозирование реагентов данным устройством осуществляется путем изменения степени открытия сегментного клапана в зависимости от требуемого расхода, измеряемого расходомером.
Недостатками известного устройства являются невозможность измерения расходов жидкостей, имеющих значения электропроводности и скорости движения ниже пороговых для приборов, работающих на магнитоиндукционном принципе.
Наиболее близким по технической сущности и достигаемому результату к предложенному устройству является устройство автоматического дозирования флотореагентов, включающее дозатор, блок управления, трубопроводы, управляющий и отсечной клапаны (RU, патент на полезную модель №:44178, кл. G01N 1/00, 2004 г.). Корпус дозатора заполнен жидкостью. Устройство также включает буйковый датчик уровня жидкости и капилляр, через который происходит истечение жидкости в технологический процесс.
Управление расходом в данном устройстве осуществляется путем регулирования уровня жидкости в корпусе дозатора, величина которого функционально связана со скоростью истечения и, следовательно, расходом жидкости, протекающей через капилляр.
Недостатками известного устройства автоматического дозирования флотореагентов являются низкие надежность и точность регулирования расхода, отсутствие контроля величины фактического расхода вытекающей жидкости.
Низкие надежность и точность дозирования обусловлены конструкцией датчика уровня, т.к. на высоту подъема буйка влияет концентрация (плотность) контролируемой жидкости, а также возможностью нарастания на его поверхности при контакте с некоторыми типами жидкостей, склонных к налипанию, нерастворимых отложений, приводящих к изменению его подъемной силы.
Кроме того, на скорость истечения из капилляра, помимо высоты столба жидкости над ним, влияет ее вязкость, величина которой зависит от плотности, температуры и других изменяющихся во времени факторов.
Технический результат, на достижение которого направлено настоящее изобретение, заключается в повышении надежности и точности регулирования расхода жидкости, за счет устранения влияния изменения ее физических свойств путем контроля фактического расхода, а также благодаря наличию возможности автоматической градуировки дозатора.
Указанный технический результат достигается тем, что устройство автоматического дозирования флотореагентов, включающее дозатор, блок управления, трубопроводы, управляющий и отсечной клапаны, согласно изобретению дополнительно содержит мерную емкость, имеющую в нижней части выпускной трубопровод с отсечным клапаном, а в верхней - датчик верхнего уровня, при этом дозатор закреплен на неподвижно установленном тензорезисторе, выход управляющего клапана через питающий трубопровод и гибкую вставку соединен с питающим входом дозатора, нижняя часть дозатора имеет выпускной патрубок со встроенным дросселем, при этом входы блока управления соединены с сигнальными выходами тензорезистора и датчика верхнего уровня, а выходы- с управляющими входами управляющего и отсечного клапанов.
Кроме того, указанный технический результат достигается тем, что дроссель может быть выполнен в виде шайбы с регулируемым проходным сечением, а также тем, что датчик уровня может быть выполнен в виде бесконтактного датчика.
Бесконтактный датчик может быть оптического или емкостного типа.
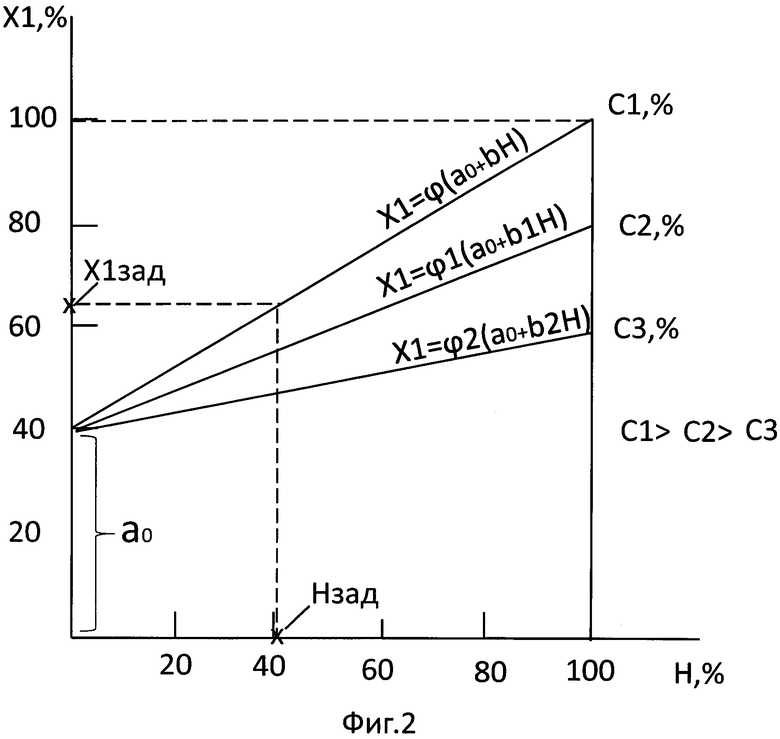
На фиг. 1 изображено устройство автоматического дозирования флотореагентов.
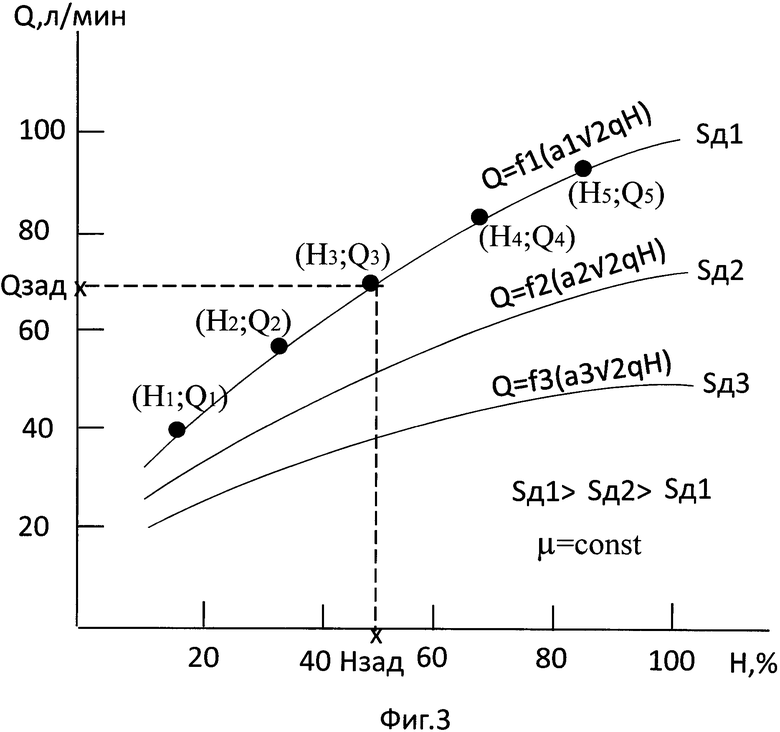
На фиг. 2 представлены графики, поясняющие характер изменения выходного сигнала X1 тензорезистора при изменении высоты H столба жидкости в корпусе дозатора.
На фиг. 3 изображены графики зависимостей производительности Q устройства от высоты H столба жидкости в корпусе дозатора.
Устройство автоматического дозирования флотореагентов содержит блок 1 управления, управляющий клапан 2, отсечной клапан 3, питающий трубопровод 4, гибкую вставку 5, питающий вход 6, дозатор 7, выпускной патрубок 8, регулируемый дроссель 9, мерную емкость 10, выпускной трубопровод 11, неподвижно установленный тензорезистор 12, на котором закреплен дозатор 7, датчик 13 верхнего уровня.
Работа устройства осуществляется следующим образом. С выходов блока 1 управления подают на управляющие входы управляющего клапана 2 и отсечного клапана 3 команды соответственно Y1 и Y2 на их открытие. Реагент через открытый управляющий клапан 2, питающий трубопровод 4, гибкую вставку 5 и питающий вход 6 поступает в дозатор 7. Далее в дозаторе 7 поток разделяется на две части. Одна часть через выпускной патрубок 8, регулируемый дроссель 9, мерную емкость 10, отсечной клапан 3 и выпускной трубопровод 11 направляется в технологический процесс. Другая часть заполняет внутренний объем дозатора 7. В соответствии с концепцией дозатора площадь Sд проходного сечения дросселя 9 выбирается существенно меньше площади Sк проходного сечения управляющего клапана 2 в открытом положении. Вследствие этого уровень жидкости Н в дозаторе 7 будет подниматься. Одновременно с выхода тензорезистора 12 на вход блока 1 управления поступает сигнал X1, пропорциональный суммарному весу дозатора 7 с примыкающими к нему частями - питающим входом 6, выпускным патрубком 8 с дросселем 9, и заполняющей его жидкости (благодаря гибкой вставке 5 вес питающего трубопровода 4 и управляющего клапана 2 не суммируется с весом дозатора 7 с примыкающими к нему частями). Поскольку вес дозатора 7 с примыкающими к нему частями постоянен, то переменная часть сигнала X1 связана только с изменением высоты Н, соответствующей уровню жидкости в дозаторе 7.
На фиг. 2 представлены графики, поясняющие характер изменения выходного сигнала X1 для описываемой ситуации. В начальном положении при отсутствии жидкости (Н=0) выходной сигнал X1 является постоянной величиной и пропорционален весу дозатора 7 с примыкающими к нему частями (Х1=а0). По мере наполнения жидкостью дозатора 7 и увеличения высоты Н выходной сигнал X1 начинает расти в соответствии с функциональной зависимостью

где а0, b - коэффициенты уравнения, описывающего зависимость выходного сигнала тензорезистора 12 от величины оказываемого на него давления столбом жидкости высотой Н и концентрацией дозируемого вещества С.
Далее, при увеличении уровня Н жидкости до некоторого заданного значения Нзад и достижении, согласно зависимости (1), сигналом X1 значения X1зад блок 1 вырабатывает управляющий сигнал Y1, обеспечивающий изменение степени открытия и, соответственно, величины площади Sк проходного сечения управляющего клапана 2 таким образом, чтобы стабилизировать выходной сигнал X1 тензорезистора 12 на уровне X1зад, тем самым поддерживая уровень Н в дозаторе 7 на значении Нзад. В связи с тем, что между высотой столба Н и расходом жидкости Q, вытекающей из сосуда через отверстие площадью S, существует известная зависимость (Лекция 5. Истечение жидкости из отверстий, насадков и из-под затворов. Электронный ресурс: http://gidravl.narod.ru/istechenie.html):

где µ - коэффициент расхода, зависящий от условий истечения и вязкости жидкости;
q - константа ускорения свободного падения,
то поддерживая необходимую высоту Нзад столба жидкости при условии постоянства значения коэффициента расхода (µ=const), дозатор обеспечивает подачу заданного количества реагента в процесс.
Так как физические свойства различных жидкостей не одинаковы и могут изменяться под воздействием внешних факторов, например температуры окружающей среды, то до запуска дозатора в работу необходимо предварительно определить коэффициенты уравнения функциональной зависимости (1) и произвести градуировку его расходных характеристик в соответствии с уравнением (2).
Построение функциональной зависимости (1) производится путем фиксирования значений выходного сигнала X1 тензорезистора 12 при постепенном заполнении реагентом с известной величиной С концентрации дозатора 7 и отсутствии протекания жидкости через выпускной патрубок 8 (площадь Sд проходного сечения дросселя 9 устанавливается равной 0). При изменении величины концентрации (C1, С2 … Cn) может быть получено семейство функциональных зависимостей (фиг. 2). Коэффициенты уравнений функциональных зависимостей заносятся в память блока 1 управления.
Процедура градуировки расходных характеристик осуществляется следующим образом. Устанавливают величину Sд1 площади проходного сечения дросселя 9 из расчета обеспечения прохождения необходимого расхода выбранного реагента. Задают некоторые значения высоты уровней H жидкости в дозаторе 7 - H1, Н2 … Hn (H1<H2 … <Hn).
Включают дозатор и подают на его вход реагент с известной величиной вязкости (µ=const). После стабилизации уровня H жидкости на значении H1 блок 1 управления подает команду Y2 на закрытие отсечного клапана 3, в результате чего уровень h жидкости в мерной емкости 10 начнет расти. При достижении уровнем h зоны срабатывания hзад датчика 13 верхнего уровня с его выхода на вход блока 1 поступает соответствующий сигнал Х2. Блок 1 управления фиксирует время Т1 от момента подачи сигнала Y2 на закрытие отсечного клапана 3 до момента получения сигнала Х2. По полученным данным блок 1 управления вычисляет координаты первой градуировочной точки (H1; Q1),
где Q1=V1/T1 - расход жидкости (ед. объема/ед. времени),
V1 - объем жидкости в мерной емкости 10, выполненной в форме цилиндра с площадью Sмк основания и высотой заполнения hзад;
T1 - время заполнения мерной емкости 10.
Аналогичные процедуры выполняют для вычисления координат других градуировочных точек (Н2; Q2), (Н3; Q3) и т.д. (фиг. 3). Для полученных градуировочных точек одним из известных в математике приемов подбирают аппроксимирующую функцию, которую и принимают за расходную характеристику для заданных условий:

где a1 - коэффициент аппроксимации.
При изменении величины площади (Sд1, Sд2 … Sдn) проходного сечения дросселя 9 может быть построено семейство расходных характеристик. Полученные коэффициенты аппроксимации также заносятся в память блока 1.
В случае изменения величины вязкости µ подаваемого реагента градуировка устройства должна быть выполнена заново.
Процедурой градуировки можно также воспользоваться для контроля фактического расхода жидкости.
Таким образом, использование в технологических процессах предложенного устройства автоматического дозирования флотореагентов позволяет повысить надежность и точность дозирования реагентов за счет устранения влияния изменения их физических свойств путем контроля фактического расхода, а также благодаря наличию возможности автоматической градуировки дозатора.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДОЗИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ ДОЗИРОВАНИЯ ТОПЛИВА | 2009 |
|
RU2490483C2 |
| Дозатор жидкости | 1989 |
|
SU1703978A1 |
| Устройство для внутрипочвенного дифференцированного внесения жидких минеральных удобрений и пестицидов | 2021 |
|
RU2770488C1 |
| УСТРОЙСТВО ДЛЯ ДОЗИРОВАНИЯ ЖИДКИХ РЕАГЕНТОВ (ВАРИАНТЫ) | 2006 |
|
RU2337326C2 |
| Импульсный автоматический дозатор жидкости | 1984 |
|
SU1210065A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РЕАКТОРОМ ПОЛУНЕПРЕРЫВНОГО ДЕЙСТВИЯ | 2005 |
|
RU2294237C2 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РЕАКТОРОМ ПОЛУНЕПРЕРЫВНОГО ДЕЙСТВИЯ | 2005 |
|
RU2299094C2 |
| Устройство для измерения расхода жидкости | 1990 |
|
SU1770760A1 |
| Способ поверки дозаторов и расходомеров непрерывного действия и устройство для его осуществления | 1991 |
|
SU1760361A1 |
| Система химической водоподготовки | 2024 |
|
RU2825923C1 |
Изобретение относится к устройствам автоматического дозирования флотореагентов и других жидких компонентов в технологический процесс и может быть использовано в области обогащения руд полезных ископаемых, а также в горнометаллургической, строительной и других отраслях промышленности. Заявленное устройство автоматического дозирования флотореагентов включает дозатор, блок управления, трубопроводы, управляющий и отсечной клапаны, при этом дополнительно содержит мерную емкость, имеющую в нижней части выпускной трубопровод с отсечным клапаном, а в верхней - датчик верхнего уровня, при этом дозатор закреплен на неподвижно установленном тензорезисторе, выход управляющего клапана через питающий трубопровод и гибкую вставку соединен с питающим входом в дозатор, нижняя часть дозатора имеет выпускной патрубок со встроенным дросселем, при этом входы блока управления соединены с сигнальными выходами тензорезистора и датчика верхнего уровня, а выходы - с управляющими входами управляющего и отсечного клапанов. Технический результат заключается в повышении надежности и точности регулирования расхода жидкости за счет устранения влияния изменения ее физических свойств путем контроля фактического расхода, а также благодаря наличию возможности автоматической градуировки дозатора. 4 з.п. ф-лы, 3 ил.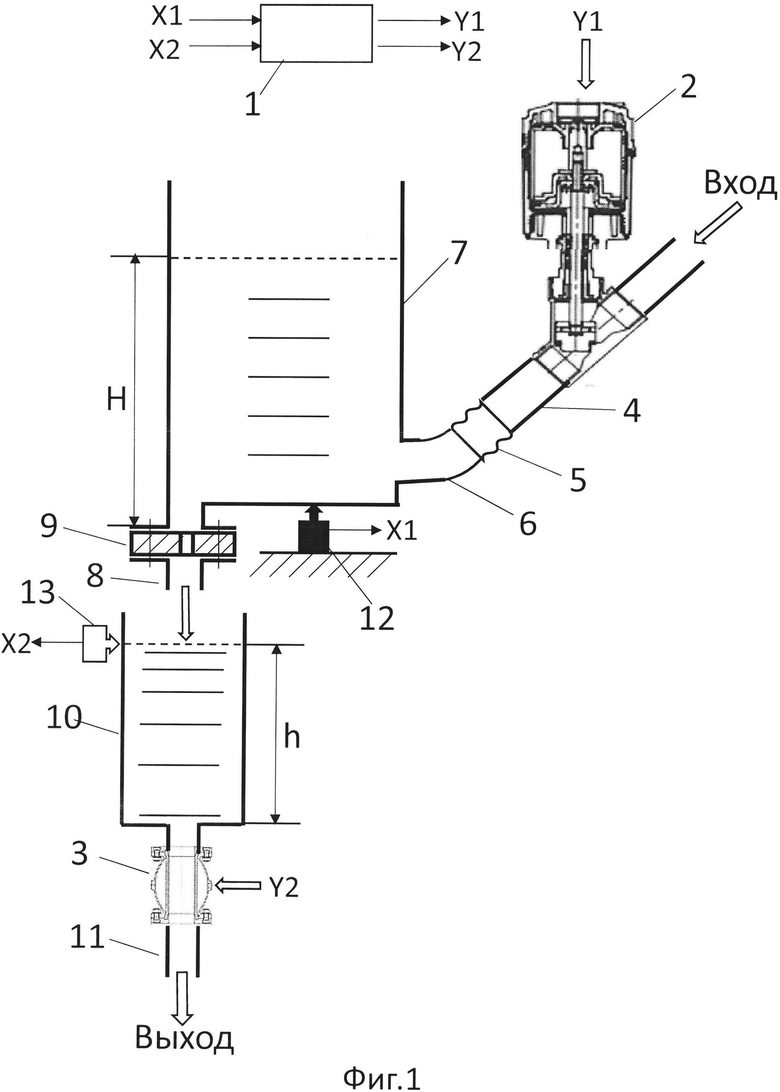
1. Устройство автоматического дозирования флотореагентов, включающее дозатор, блок управления, трубопроводы, управляющий и отсечной клапаны, отличающееся тем, что оно дополнительно содержит мерную емкость, имеющую в нижней части выпускной трубопровод с отсечным клапаном, а в верхней - датчик верхнего уровня, при этом дозатор закреплен на неподвижно установленном тензорезисторе, выход управляющего клапана через питающий трубопровод и гибкую вставку соединен с питающим входом в дозатор, нижняя часть дозатора имеет выпускной патрубок со встроенным дросселем, при этом входы блока управления соединены с сигнальными выходами тензорезистора и датчика верхнего уровня, а выходы - с управляющими входами управляющего и отсечного клапанов.
2. Устройство автоматического дозирования флотореагентов по п. 1, отличающееся тем, что дроссель выполнен в виде шайбы с регулируемым проходным сечением.
3. Устройство автоматического дозирования флотореагентов по п. 1, отличающееся тем, что датчик верхнего уровня выполнен в виде бесконтактного датчика.
4. Устройство автоматического дозирования флотореагентов по п. 1, отличающееся тем, что датчик верхнего уровня выполнен в виде бесконтактного датчика оптического типа.
5. Устройство автоматического дозирования флотореагентов по п. 1, отличающееся тем, что датчик верхнего уровня выполнен в виде бесконтактного датчика емкостного типа.
| Передвижной черпаковый элеватор | 1932 |
|
SU44178A1 |
| УСТРОЙСТВО ДЛЯ ДОЗИРОВАНИЯ ФЛОТОРЕАГЕНТОВ | 2000 |
|
RU2184388C2 |
| WO 1996039651 A1,12.12.1996 | |||
| US 4526188 A1 02.07.1985.. | |||

