Изобретение относится к космической технике и может быть использовано на космических аппаратах (КА) дистанционного зондирования земной поверхности (ДЗЗ).
Из предшествующего уровня техники известны конструкции рам антенн космических аппаратов (КА), в виде трансформируемого каркаса с системой тросов, см., например, RU 2276793, RU 2048698.
Недостатком таких антенн является громоздкая конструкция каркасов, а также сложная и ненадежная система управления тросами.
Наиболее близким аналогом, выбранным в качестве прототипа предложенного изобретения, является силовая рама радиолокационной антенны (РРЛА), представляющая собой центральную створку, с которой жестко связана стойка и шарнирно связана с остальными (складными по пакетной схеме) створками. Стойка снабжена пантографом, который одной своей оконечностью шарнирно закреплен на корпусе КА с возможностью взаимодействия с приводом для поворота вокруг оси шарнирного крепления пантографа, а другой своей оконечностью шарнирно связан с одним из концов подкоса, шарнирно закрепленного на стойке и снабженного дополнительным приводом поворота стойки вокруг оси шарнирного крепления подкоса. Кроме того, РРЛА снабжена фиксаторами, пружинными механизмами и пиротехническими средствами для транспортировки и развертывание в рабочее положение. На створках размещена радиоэлектронная аппаратура, которая в рабочем положении РРЛА представляет собой плоскую радиолокационную антенну, см. RU 2066665, B64G 1/44,1996 г.
Недостатком прототипа является сложная, материалоемкая и громоздкая конструкция, не позволяющая обеспечить достаточную жесткость и точность плоской конфигурации антенны в рабочем положении.
Задачей, на решение которой направлено предложенное изобретение, является повышение надежности, упрощение конструкции и снижение материалоемкости.
Решение указанной задачи обеспечено за счет того, что в РРЛА КА, содержащей центральную створку с шарнирно соединенными с ней двумя складными крыльями из нескольких боковых шарнирно соединенных между собой створок с антенными полотнами (АП), средства фиксации (СФ) створок в транспортном и раскрытом положениях, а также средство развертывания крыльев (СРК), согласно изобретению створки выполнены в виде ложементов АП, каждое крыло РРЛА снабжено индивидуальным СРК, выполненным в виде пружинного механизма (ПМ) с гибкой тягой (ГТ), один конец которой соединен со шкивом ПМ, снабженного приводом, а другой - с крайним ложементом крыла РРЛА, причем ГТ пропущена через поворотные ролики (ПР) на концевых участках остальных ложементов крыла, при этом ПМ обоих крыльев закреплены на тыльной стороне центрального (корневого) ложемента, неподвижно закрепленного на корпусе КА.
Предпочтительно, чтобы крылья состояли из одинакового количества ложементов; каждый ложемент был выполнен из швеллера с одинаковой толщиной полок и стенки и снабжен стойками с точными поверхностями; ГТ была пропущена с оборотом вокруг каждого ПР; ПМ был оборудован спиральной пружиной, связанной со шкивом и через храповик и редуктор - с приводом в виде шагового электродвигателя; ПМ были расположены на корневом ложементе симметрично относительно его поперечной оси симметрии; ложементы дополнительно были снабжены пружинными прижимами ГТ к ПР; в области шарнирных соединений (ШС) на каждых сопрягаемых торцах ложементов закреплены магнитная и механическая части магнитомеханического упора (МУ), а также концевой датчик (КД) и его нажимной механизм; КД были выполнены в виде микропереключателей; каждое крыло состояло из одинакового количества ложементов; СФ пакетов были выполнены в виде подпружиненных откидных рычагов зачековки и пироболтов; СФ ложементов в раскрытом положении были выполнены в виде подпружиненных защелок-демпферов и ответных замков, установленных на концевых частях ложементов, в областях их ШС; ложементы снабжены средствами крепления антенных полотен; в центре ложементов установлены термодатчики; в рабочем положении продольная ось РРЛА должна быть расположена перпендикулярно к продольной оси КА.
Техническим результатом, достигаемым при реализации предложенного изобретения, является упрощение конструкции, снижение материалоемкости и повышение надежности РРЛА.
Изобретение поясняется чертежами, где:
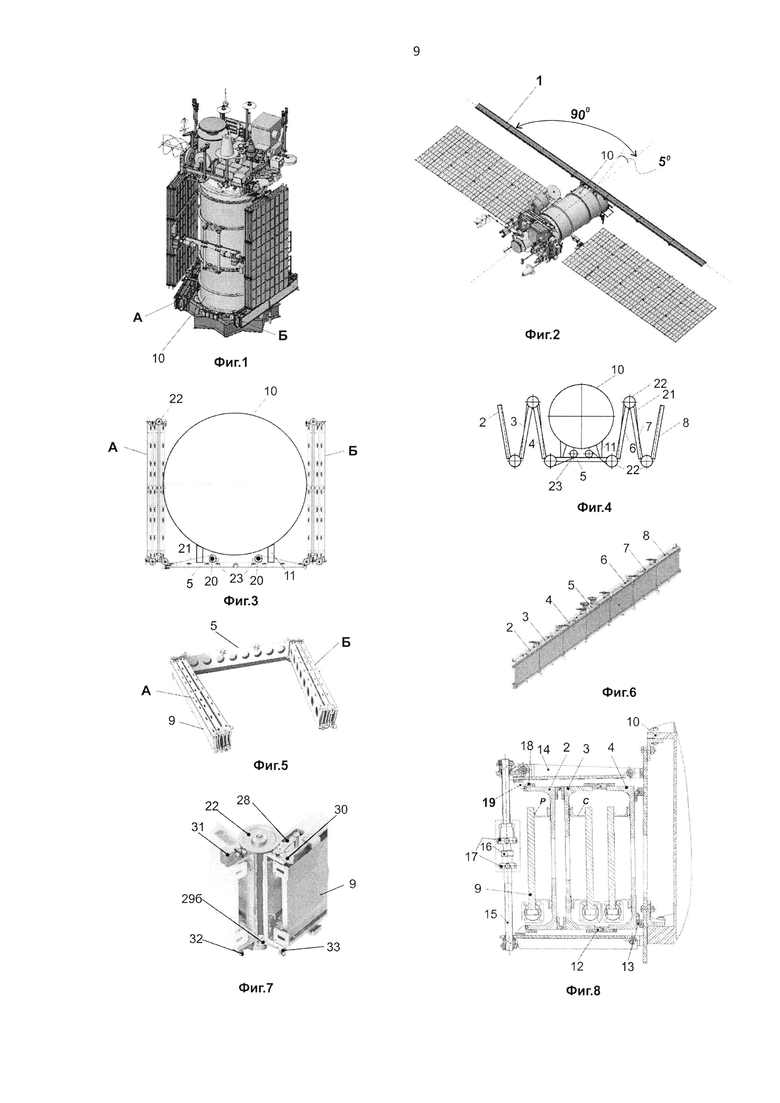
- на фиг. 1 и 2 показаны фотографии двух общих видов КА с РРЛА в транспортном и рабочем положениях;
- на фиг. 3 - общий вид (поперечный разрез) КА с РРЛА в транспортном положении;
- на фиг. 4 - кинематическая схема РРЛА;
- на фиг. 5 - фотография РРЛА в промежуточной фазе раскрытия;
- на фиг. 6 - фотография развернутой РРЛА;
- на фиг. 7 - фотография шарнирного узла РРЛА;
- на фиг. 8 - фрагмент общего вида (продольный разрез) зачекованного пакета ложементов;
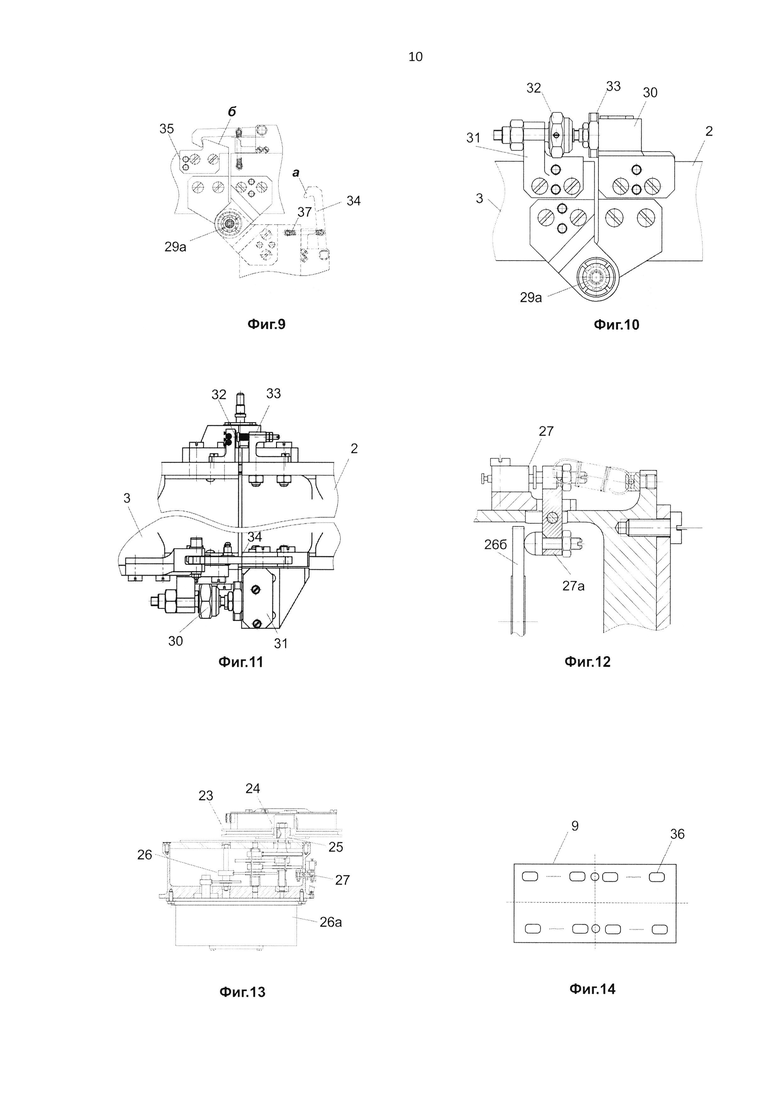
- на фиг. 9 - защелка демпфер (фрагмент вида спереди);
- на фиг. 10 - магнитомеханический упор (фрагмент вида спереди);
- на фиг. 11 - фрагмент фиг. 9 (вид в плане)
- на фиг. 12 - датчик вращения привода (фрагмент продольного разреза);
- на фиг. 13 - пружинный механизм (продольный разрез);
- на фиг. 14 - антенное полотно (вид в плане).
Позиции, показанные на чертежах, означают следующее.
1 - РРЛА; 2, 3, 4 - ложементы складного крыла (СК) А; 5 - центральный (корневой) ложемент; 6, 7, 8 - ложементы СК Б; 9 - антенные полотна (радиолокационные элементы РА); 10 - корпус КА; 11 - кронштейны; 12 клиновидные упоры; 13 - сферические упоры; 14 - зачековочные рычаги; 15 - тяги рычагов; 16 - пироболты; 17 - карданный подвес; 18 - накладки ложементов; 19 - упорные выступы рычагов; 20 - пружинный механизм (ПМ); 21 - гибкая тяга (ГТ); 22 - поворотные ролики (ПР); 23 - шкив ПМ; 24 - спиральная пружина ПМ; 25 - храповик; 26 - редуктор; 26а - шаговый электродвигатель; 26б - шестерня редуктора; 27 - датчик вращения; 27а - двуплечий рычаг; 28 - подпружиненные прижимы; 29 - подшипниковый узел; 30, 31 - соответственно механическая и магнитная части магнитомеханического упора; 32 - концевой датчик; 33 - нажимной механизм концевого датчика; 34 - защелка-демпфер; 35 - замок с фасонной замковой пластиной; 36 - вырезы в антенных полотнах; 37 - пружина защелки-демпфера.
Предложенная РРЛА 1 представляет собой складную конструкцию, состоящую из шарнирно соединенных между собой ложементов 2, 3, 4, 5, 6, 7, 8, предназначенных для закрепления на них антенных полотен (радиолокационных элементов) 9. Все ложементы выполнены из стандартного профиля (швеллера) из АМг6 и снабжены стойками C, имеющими точные поверхности P для крепления антенных полотен и контроля отклонения от плоскостности (см. фиг. 8). Для обеспечения стабильности геометрии ложемента при штатной эксплуатации, а также равномерного распределения теплового потока внутри ложемента швеллер выполнен с одинаковой толщиной полок и стенки. Центральный (корневой) ложемент 5 закреплен на шпангоутах корпуса 10 посредством кронштейнов 11. Для компенсации возможных тепловых деформаций корпуса КА корневой ложемент 5 закреплен на титановых кронштейнах 11 двумя точными болтами (условно не показаны), один из которых затянут «намертво», а другой с регламентированным моментом. Под этот болт в одном из кронштейнов выполнен паз (условно не показан). Корневой ложемент 5 закреплен на кронштейнах 11 в плоскости, расположенной под углом 5° к оси Z КА.
Ложементы 2, 3, 4 и 6, 7, 8 входят в состав складных крыльев А и Б РРЛА. Эти крылья шарнирно закреплены на противоположных концах корневого ложемента 5 (см. фиг. 5). В транспортном положении крылья А и Б сложены в два пакета (см. фиг. 3, 5), в которых ложементы 2, 3, 4, и 6, 7, 8 расположены параллельно друг другу с опорой на клиновидные 12 и сферические 13 упоры. В пакетах ложементы сжаты посредством зачековочных рычагов 14, установленных с возможностью поворота относительно корпуса КА. Рычаги 9 затянуты и зафиксированы (зачекованы) посредством тяг 15, снабженных пироболтами 16 с карданными подвесами 17 (для устранения несоосности). За счет того, что на крайних ложементах 2 и 8 закреплены накладки 18 со скошенными поверхностями для контакта с упорными выступами 19 на рычагах 14, а также за счет клиновидных 12 и сферических упоров 13 усилия зачековки, передаваемые на пакеты ложементов от зачековочных рычагов 14 равномерно перераспределяются вдоль и поперек ложементов, что повышает равномерность распределения нагрузки зачековки на ложементы, а также ликвидирует зазоры и сборочные неточности, обеспечивая этим необходимую прочность и жесткость пакетов. Крылья А и Б снабжены индивидуальными средствами их развертывания в рабочее положение, выполненными в виде ПМ 20 с ГТ 21, которые одним концом закреплены на крайних ложементах 2 и 8 и пропущены через ПР 22 с оборотом ГТ 21 вокруг каждого ПР 22. Другие концы ГТ 21 закреплены на шкивах 23 ПМ 20 (см. фиг. 8). Каждый ПМ 20 (см. фиг. 13) снабжен спиральной пружиной 24, связанной со шкивом 23 ПМ, вал которого соединен с храповиком 25, редуктором 24 и приводом в виде шагового электродвигателя 26а. Спиральные пружины имеют достаточно пологую характеристику, т.е. сила пружины в малой степени зависит от количества оборотов, на которые пружина закручена, поэтому такие пружины особенно подходят для использования в данной конструкции. На редукторе 24 смонтирован датчик 27 вращения, установленный с возможностью срабатывания при качательном движении подпружиненного двуплечего рычага 27а, контактный выступ которого прижат к шестерне 26б, поверхность которой выполнена с углублениями. ПМ 20 (и приводы 26а) обоих крыльев закреплены на центральном ложементе 5 симметрично относительно его поперечной оси симметрии. ПР 22 установлены соосно осям подшипниковых узлов 296 в шарнирных соединениях 29а с возможностью свободного вращения вокруг своих осей, что исключает передачу от них крутящего момента на ложементы. Для предотвращения соскакивания ГТ 21 с ПР 22 на ложементах установлены подпружиненные прижимы 27 ГТ 21 (см. фиг. 7). Для точного относительного позиционирования ложементов (в раскрытом положении) в стыках смежных ложементов на одном из их торцов закреплена механическая 30 часть, а на другом - ответная магнитная 31 часть магнитомеханических упоров. Механическая часть 30 магнитомеханических упоров выполнена с возможностью точной регулировки (при монтаже) величины вылета ее упора. Кроме того, для контроля раскрытия ложементов РРЛА на концевых частях смежных ложементов, в области подшипниковых узлов 29 на одном из этих ложементов закреплен концевой датчик 32, установленный с возможностью взаимодействия с нажимным механизмом 33, установленным на другом смежном ложементе. Для фиксации ложементов в раскрытом положении средства их фиксации выполнены в виде подпружиненных защелок-демпферов 34 и ответными им замками 35, при этом защелка демпфер 34 установлена на первом ложементе с возможностью взаимодействия с замком 35, установленным на втором смежном ложементе. Оба элемента средства фиксации установлены в области шарнирных соединений ложементов на краях полок швеллеров (см. фиг. 11). Поскольку ложементы и антенные полотна 9 изготовлены из различных алюминиевых сплавов, целесообразно, чтобы в антенных полотнах 9 были выполнены вырезы 36 для предотвращения тепловых деформации этих полотен. В центральной части антенные полотна 9 жестко закреплены на ложементах, а остальные части этих полотен закреплены в вырезах с регламентированным усилием, что обеспечивает возможность ограниченного перемещения в точках закрепления в пределах вырезов 36 вдоль поверхности ложементов при изменении температуры антенного полотна. На внешней поверхности каждого ложемента с противоположной от антенного плотна стороне, закреплена экранно-вакуумная теплоизоляция (ЭВТИ) - (условно не показана). На внутренней поверхности ложементов (под антенным полотном) закреплены термодатчики (условно не показаны), расположенные в центре ложементов. Антенные полотна 9 снабжены электронагревателями (условно не показаны), которые расположены на нерабочих, обращенных к ложементам поверхностях этих полотен.
Работа РРЛА в составе РЛА осуществляется следующим образом.
На этапе выведения КА шесть ложементов РРЛА 1 собраны в два пакета и зачекованы на корпусе 10. После вывода КА на рабочую орбиту и подачи команды на расчековку пироболты 16 перегорают и зачековочные рычаги 14 откидываются в разные стороны под действием пружин кручения (условно не показаны), расположенных в осях этих рычагов. Вследствие того что ГТ 21 находятся под натяжением от действия предварительно взведенных спиральных пружин ПМ 20, оба крыла А и Б антенны раскрываются под действием усилия натяжения ГТ 21. При раскрытии крыльев ложементы 2, 3, 4 и 6, 7, 8 поворачиваются в шарнирных соединениях, при этом шкивы 23 вращаются и натягивают ГТ 21, тем самым осуществляя раскрытие крыльев. За счет одинаковых диаметров ПР 22 и шкивов ПМ 20 при раскрытии крыльев шкивы ПМ 20 поворачиваются на 1,25 оборота. В момент полного раскрытия возникающие в области шарнирных соединений от движения ложементов ударные нагрузки демпфируется за счет растягивания пружин 38 защелок-демпферов 34. Демпфирование этих нагрузок происходит в момент, когда при сближении торцов смежных ложементов крючкообразный выступ а защелок-демпферов 34 касается и начинает скользить по наклонной поверхности б фасонной замковой поверхности замка 35, растягивая этим пружину 38 защелки-демпфера 34. Затем, в момент касания механической части 30 магнитной части 31 магнитомеханического упора выступ а защелки-демпфера 34 соскальзывает с наклонной поверхности б замковой пластины замка 35 и проваливается во впадину этой пластины, фиксируя за счет этого смежные ложементы. Следует отметить, что за счет выбранной геометрии защелок и замковых пластин обеспечивается нулевой люфт в шарнирном соединении ложементов. Вследствие того что концевые датчики 32 расположены в каждом из шести стыков ложементов, сигнал о неполном раскрытии какого-либо шарнирного соединения ложементов поступает на шаговый двигатель 26а соответствующего ПМ 20, при включении которого соответствующая ГТ 21 дополнительно натягивается и приводит ложементы в необходимое положение, при этом срабатывает один из датчиков 32, по сигналу которого двигатель 26а выключается. Телеметрический сигнал о работе шагового двигателя поступает от датчика вращения 27. Выключение двигателя 26а осуществляется через определенное время после его включения. Время работы двигателя 26а определено эмпирически и подобрано из условия оптимального натяжения ГТ.
Таким образом, после расчековки крылья А и Б раскрываются под действием крутящего момента, создаваемого спиральными пружинами ПМ 20, а при включении электродвигателей ПМ 20 осуществляется заводка этих пружин и регламентированное натяжение ГТ, за счет чего достигается необходимая сила прижатия магнитомеханических упоров ложементов и обеспечивается жесткость и заданная плоскостность в рабочем положении РРЛА.
На этапе штатной эксплуатации одна сторона ложементов освещена солнцем, а вторая, со стороны расположения антенного полотна, находится в тени. Выравнивание температуры между ложементом и антенным полотном осуществляется матами ЭВТИ и электронагревателями. Телеметрирование температуры ложементов и полотен осуществляется с помощью термодатчиков.
По сравнению с прототипом предложенное изобретение имеет более простую, компактную и надежную конструкцию, а также меньшую материалоемкость.
| название | год | авторы | номер документа |
|---|---|---|---|
| СОЛНЕЧНАЯ БАТАРЕЯ КОСМИЧЕСКОГО АППАРАТА | 1998 |
|
RU2167793C2 |
| Самолет интегральной аэродинамической компоновки | 2020 |
|
RU2749175C1 |
| МУСКУЛЬНЫЙ ПЛАВАЮЩИЙ МАХОЛЕТ "ЛЕБЕДУШКА" | 2004 |
|
RU2304546C2 |
| УСТРОЙСТВО КРЕПЛЕНИЯ И РАСФИКСАЦИИ ПОДВИЖНЫХ ЭЛЕМЕНТОВ КОНСТРУКЦИИ КОСМИЧЕСКОГО АППАРАТА | 2010 |
|
RU2422334C1 |
| Устройство для продолжительной иммобилизации и вытяжения при переломе костей голени в предоперационном периоде | 2022 |
|
RU2807393C1 |
| ИМИТАЦИОННО-ИСПЫТАТЕЛЬНЫЙ КОМПЛЕКС ДЛЯ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2012 |
|
RU2533779C2 |
| Спускоподъемное устройство для малогабаритных необитаемых подводных аппаратов и опускаемых гидроакустических антенн с судна-носителя | 2021 |
|
RU2760798C1 |
| ТРАНСПОРТНО-ТЕХНОЛОГИЧЕСКОЕ КОЛЬЦО | 2003 |
|
RU2252159C2 |
| ДЕМПФИРУЮЩЕЕ ИЛИ ВОЗВРАТНОЕ УСТРОЙСТВО ДЛЯ СКОЛЬЗЯЩИХ ДВЕРНЫХ ПОЛОТЕН ИЛИ ДЛЯ ВЫДВИЖНЫХ ЯЩИКОВ | 2015 |
|
RU2687624C2 |
| Машина для настилания полотен ткани на раскройный стол | 1974 |
|
SU667475A1 |
Изобретение относится к оборудованию, развертываемому снаружи космического аппарата (КА), и может быть использовано на КА дистанционного зондирования земной поверхности. Рама радиолокационной антенны (РЛА) КА выполнена в виде крыльев с шарнирно соединенными ложементами (2, 3, 4) и (6, 7, 8). На них закреплены при помощи стоек с точными поверхностями антенные полотна. Крылья снабжены индивидуальными средствами развертывания в рабочее положение в виде пружинных механизмов со шкивами (23) и гибкими тягами (21). Тяги одним концом закреплены на крайних ложементах (2) и (8) и пропущены вокруг роликов (22). Другие их концы закреплены на шкивах (23). Центральный ложемент (5) закреплен кронштейнами (11) на корпусе (10) КА в плоскости, расположенной под углом 5° к оси (Z) КА. Для точного позиционирования в раскрытом положении в стыках смежных ложементов на одном из их торцов закреплена механическая часть, а на другом - ответная магнитная часть магнитомеханических упоров. В транспортном положении ложементы крыльев РЛА сложены в два пакета и зачекованы подпружиненными откидными рычагами с пироболтами. Техническим результатом изобретения является повышение надежности, упрощение конструкции и снижение материалоемкости рамы РЛА. 13 з.п. ф-лы, 14 ил.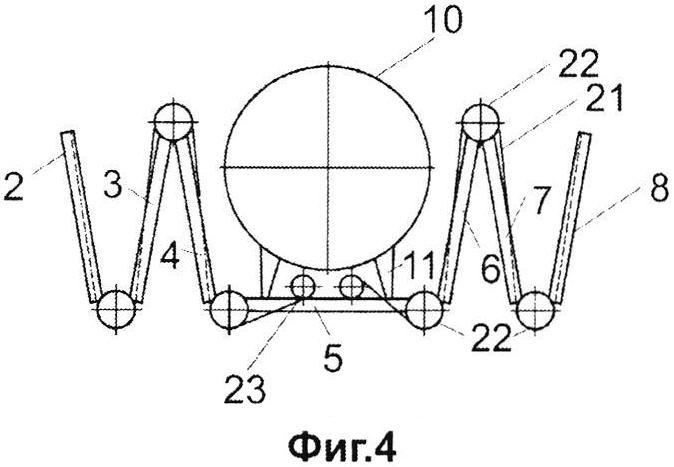
1. Рама радиолокационной антенны космического аппарата, содержащая складную конструкцию в виде корневой центральной створки и шарнирно соединенных с ней двух складываемых по пакетной схеме крыльев из нескольких шарнирно соединенных между собой створок под антенные полотна в виде радиоэлектронной аппаратуры, средства фиксации створок в транспортном и раскрытом положениях, а также средство развертывания крыльев, отличающаяся тем, что створки выполнены в виде ложементов под антенные полотна, каждое крыло рамы снабжено индивидуальным средством его развертывания, выполненным в виде пружинного механизма с гибкой тягой, один конец которой соединен со шкивом пружинного механизма, снабженного приводом, а другой - с крайним ложементом крыла рамы, причем гибкая тяга пропущена через поворотные ролики, установленные на концевых участках остальных ложементов крыла, при этом пружинные механизмы обоих крыльев закреплены на корневом ложементе, неподвижно закрепленном на корпусе космического аппарата.
2. Рама радиолокационной антенны по п. 1, отличающаяся тем, что крылья состоят из одинакового количества ложементов.
3. Рама радиолокационной антенны по п. 1, отличающаяся тем, что каждый ложемент выполнен из швеллера с одинаковой толщиной полок и стенки и снабжен стойками с точными поверхностями для закрепления антенных полотен и обеспечения возможности контроля отклонения от плоскостности.
4. Рама радиолокационной антенны по п. 1, отличающаяся тем, что гибкая тяга пропущена с оборотом вокруг каждого поворотного ролика, установленного с возможностью свободного вращения вокруг своей оси, расположенной соосно оси шарнирного соединения ложементов.
5. Рама радиолокационной антенны по п. 1, отличающаяся тем, что пружинный механизм снабжен спиральной пружиной, связанной со шкивом, соединенным через редуктор и храповик с приводом в виде шагового электродвигателя.
6. Рама радиолокационной антенны по п. 1, отличающаяся тем, что пружинные механизмы расположены на корневом ложементе симметрично относительно его поперечной оси симметрии.
7. Рама радиолокационной антенны по п. 1, отличающаяся тем, что ложементы дополнительно снабжены подпружиненными прижимами гибких тяг к поворотным роликам.
8. Рама радиолокационной антенны по п. 1, отличающаяся тем, что в области шарнирных соединений на одном из сопрягаемых смежных ложементов закреплена магнитная часть, а на другом - механическая часть магнитомеханического упора, причем в этих же областях на одном из ложементов установлен концевой датчик, а на другом - нажимной механизм этого датчика.
9. Рама радиолокационной антенны по п. 8, отличающаяся тем, что концевые датчики выполнены в виде микропереключателей.
10. Рама радиолокационной антенны по п. 1, отличающаяся тем, что средства фиксации ложементов в пакетах выполнены в виде подпружиненных откидных рычагов зачековки и пироболтов.
11. Рама радиолокационной антенны по п. 1, отличающаяся тем, что средства фиксации ложементов в раскрытом положении выполнены в виде подпружиненных защелок-демпферов и ответных замков, при этом на одном из сопрягаемых смежных ложементов закреплена защелка-демпфер, а на другом - ответный замок, причем защелка-демпфер и ответный замок установлены на концевых частях ложементов в областях их шарнирных соединений.
12. Рама радиолокационной антенны по п. 1, отличающаяся тем, что ложементы снабжены средствами крепления антенных полотен.
13. Рама радиолокационной антенны по п. 1, отличающаяся тем, что в центре ложементов установлены термодатчики.
14. Рама радиолокационной антенны по п. 1, отличающаяся тем, что в рабочем положении ее продольная ось расположена перпендикулярно к продольной оси космического аппарата.
| РАДИОЛОКАЦИОННАЯ АНТЕННА КОСМИЧЕСКОГО АППАРАТА | 1992 |
|
RU2066665C1 |
| US 2945234 A, 12.07.1960 | |||
| БАТАРЕЯ СОЛНЕЧНАЯ КОСМИЧЕСКОГО АППАРАТА | 2010 |
|
RU2460676C2 |
| RU 93035044 A, 10.01.1996 | |||
| Устройство для приема разнесенных сигналов | 1978 |
|
SU807991A1 |

