Заявляемое изобретение «Автоматизированная система контроля территорий и управления силами и средствами охраны» (далее по тексту Система) относится к технике централизованного контроля территорий (охраны объектов) и может быть использовано для контроля различных сухопутных (речных, озерных) участков территории, в том числе для охраны объектов, разнесенных на территории.
Известен ряд систем контроля обстановки на объектах с удаленным доступом, построенных по двухуровневой схеме и включающих в себя разветвленную сеть датчиков тревожной сигнализации (первый уровень), с возможностью передачи информации об обстановке на охраняемых объектах по различным каналом связи на пульт наблюдения второго уровня.
Известная система удаленного мониторинга объектов с использованием каналов связи Интранет и Интернет по патенту США [1] состоит из множества региональных систем мониторинга объектов, осуществляющих наблюдение за состоянием объекта, и интерфейса мониторинга удаленного оператора, включающего базу данных, хранящую информацию о характеристиках и состоянии удаленных охраняемых объектов. Используя эту систему, удаленный оператор может контролировать состояние датчиков, установленных на объекте, получать визуальную информацию с объекта и управлять установленным там оборудованием, используя широко распространенные каналы общего пользования (такие как Интранет, Интернет).
Недостатком описанной системы является двухуровневая организация мониторинга обстановки на объекте. Поступающая с пункта наблюдения первого уровня информация о чрезвычайных ситуациях на объекте в автоматическом режиме передается удаленному оператору, находящемуся на пункте наблюдения второго уровня. При этом дальнейшее доведение информации до органов, в зоне ответственности которых находится принятие решения по чрезвычайной ситуации на объекте, целиком зависит от действий оператора и состояния общедоступных средств и каналов связи.
Наиболее близким к предлагаемому в качестве изобретения техническому решению является система мониторинга по российскому патенту [2].
Система мониторинга содержит: объектный пункт наблюдения первого уровня, включающий тревожные извещатели, размещенные на контролируемых объектах и объединенные в шлейфы сигнализации, по крайней мере, один приемно-контрольный прибор (ПКП), подключенное к нему объектовое оборудование, например видеокамеры, исполнительные устройства, устройства идентификации пользователей, акустические приборы для оповещения с помощью тональных сигналов и голосовых сообщений и входящий в ПКП источник бесперебойного питания, коммутатор первого уровня, выполненный с возможностью передачи сигнала, несущего информацию о состоянии шлейфов сигнализации ПКП, о наличии подключенной электрической сети и уровне заряда аккумулятора, на пульт наблюдения второго уровня. Пульт второго уровня включает в себя устройство обработки сигнала (УОС), поступающего от пульта первого уровня, и коммутатор второго уровня, причем УОС пульта второго уровня выполнено с возможностью селекции (выделения) информации о бедственных ситуациях из общего потока сигналов, поступающих от пункта наблюдения первого уровня, извлечения из базы данных второго уровня информации о координатах объекта. В систему дополнительно введен, по крайней мере, один пульт наблюдения третьего уровня, содержащий устройство визуального отображения информации о ситуации, полученной из сигналов, поступивших от пульта наблюдения первого уровня с наложением на нее географической карты. Пульт наблюдения третьего уровня размещается непосредственно в государственном органе, в зону ответственности которого входит охраняемый объект.
Описанная система не может в полной мере отвечать современным требованиям, предъявляемым к организации охраны важных объектов, так как вследствие отсутствия обратной связи от третьего к первому уровню не обладает возможностью принятия оперативных решений в чрезвычайных ситуациях.
Технический результат от использования предлагаемого изобретения заключается в комплексировании технических средств контроля территорий (ТСКТ), совершенствовании управления охраной территорий (объектов), повышении оперативности принятия решений в условиях чрезвычайных ситуаций на контролируемых территориях (охраняемых объектах) в зоне ответственности органов управления на всех уровнях Системы.
В отличие от прототипа для достижения заявленного технического результата в предлагаемой Системе движение информационных потоков осуществляется автоматизированно (автоматически) в двух направлениях: снизу вверх о состоянии текущей обстановки на контролируемых территориях (охраняемых объектах) от ТСКТ, непосредственно расположенных на территориях (объектах), к вышестоящим пунктам управления и сверху вниз - распорядительная информация от вышестоящих пунктов управления к нижестоящим, а также команды управления на ТСКТ, в том числе размещенные на пилотируемых и беспилотных летательных аппаратах (БПЛА), и мобильным тревожным группам (МТГ) для реализации возникшей ситуации.
Система может иметь как четырехуровневую, так и трехуровневую иерархическую территориально распределенную структуру управления контролем территорий (охраны объектов):
- первый уровень - комплексы ТСКТ, технические средства которых размещаются непосредственно на контролируемых территориях (охраняемых объектах);
- второй уровень - комплексы средств автоматизации (КСА) пунктов управления (ПУ) нижних звеньев, непосредственно расположенных в районе контролируемых территорий (охраняемых объектов);
- третий уровень - КСА ПУ средних звеньев;
- четвертый уровень - КСА ПУ верхнего звена.
Если в автоматизируемой системе управления контролем территорий (охраной объектов) отсутствуют (не предусмотрены) пункты управления среднего звена, то Система будет иметь трехуровневую иерархическую структуру. Кроме того, Система может иметь три варианта построения: стационарный, когда КСА ПУ размещаются в зданиях в специально оборудованных помещениях, перевозимый, когда КСА ПУ размещаются в специальных перевозимых контейнерах, и смешанный, когда КСА ПУ верхних уровней управления размещаются в зданиях стационарно, а КСА пунктов управления нижних уровней - в специальных перевозимых контейнерах.
На фиг. 1 показана структурная схема построения четырехуровневой иерархической Системы. Как видно из схемы, Система состоит из двух составных частей - аппаратно-программного комплекса Системы (АПКС) и комплексов технических средств контроля территорий (КТСКТ).
АПКС состоит из необходимого количества КСА ПУ второго уровня, по меньшей мере, одного КСА ПУ третьего уровня и КСА ПУ четвертого уровня, специального программного обеспечения (СПО), реализующего функционал Системы.
КТСКТ представляют собой совокупность технических средств контроля территорий, функционально связанных специальным программным обеспечением автоматизированных рабочих мест (АРМ) и серверов ТСКТ, образующих 1-й уровень Системы.
Между АПКС и КТСКТ Системы располагаются однонаправленные шлюзы (ОНШ), предназначенные для исключения попадания информации, циркулирующей в АПКС, в КТСКТ, а также для обеспечения передачи команд управления на ТСКТ, в том числе размещенных на БПЛА, и мобильным тревожным группам.
При необходимости на коммутатор КТСКТ может заводиться информация от других (внешних) информационно совместимых источников информации.
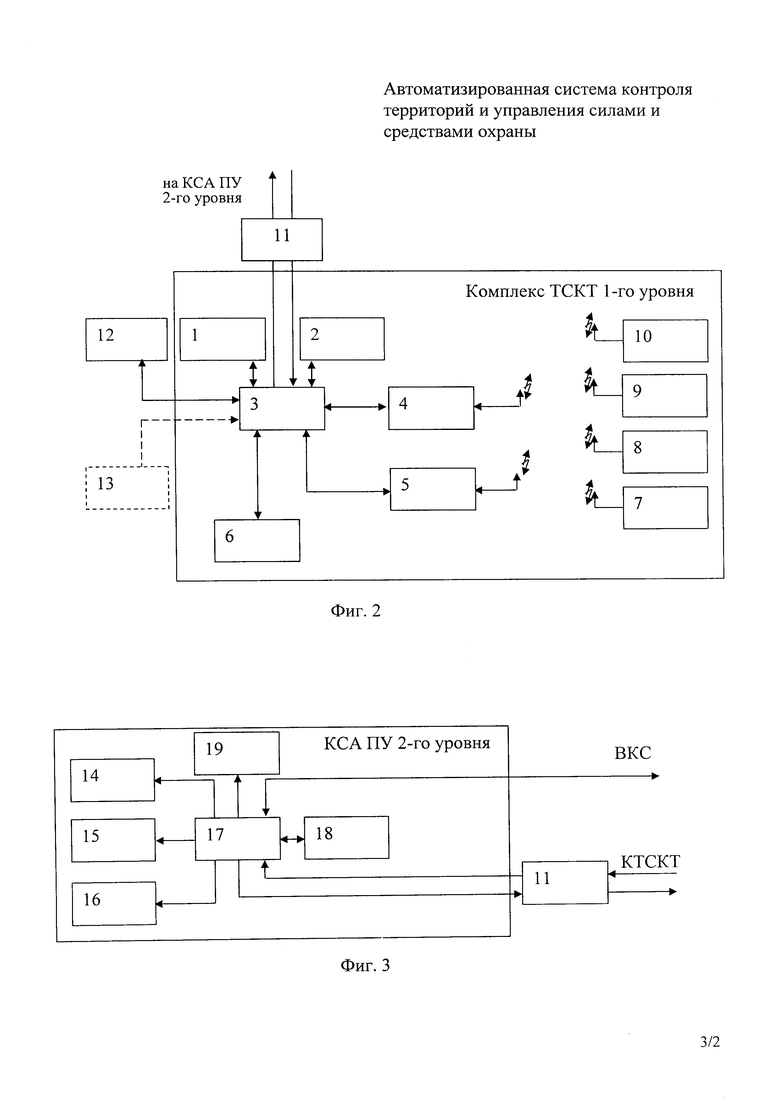
На фиг. 2 показан состав КТСКТ (первый уровень):
- АРМ оператора технических средств контроля территорий (АРМ ТСКТ) 1;
- сервер ТСКТ 2;
- коммутатор связи 3;
- базовые станции УКВ 4;
- базовые станции радиорелейной связи (РРС) 5;
- стационарные посты технического наблюдения (СПТН) 6;
- автономные посты технического наблюдения (ΑΠΤΗ) 7;
- сигнализационные средства обнаружения (ССО) 8;
- мобильны посты технического наблюдения (МПТН) 9;
- ТСКТ воздушного базирования, в том числе размещаемые на БПЛА 10.
Данные от КТСКТ через однонаправленный шлюз 11 поступают на коммутатор ЛВС 17 КСА ПУ второго уровня. Через однонаправленный шлюз 11 также поступают команды управления на МТГ 12 и БПЛА 10. При необходимости на коммутатор КТСКТ 3 может быть заведена информация от других (внешних) информационно совместимых источников информации 13.
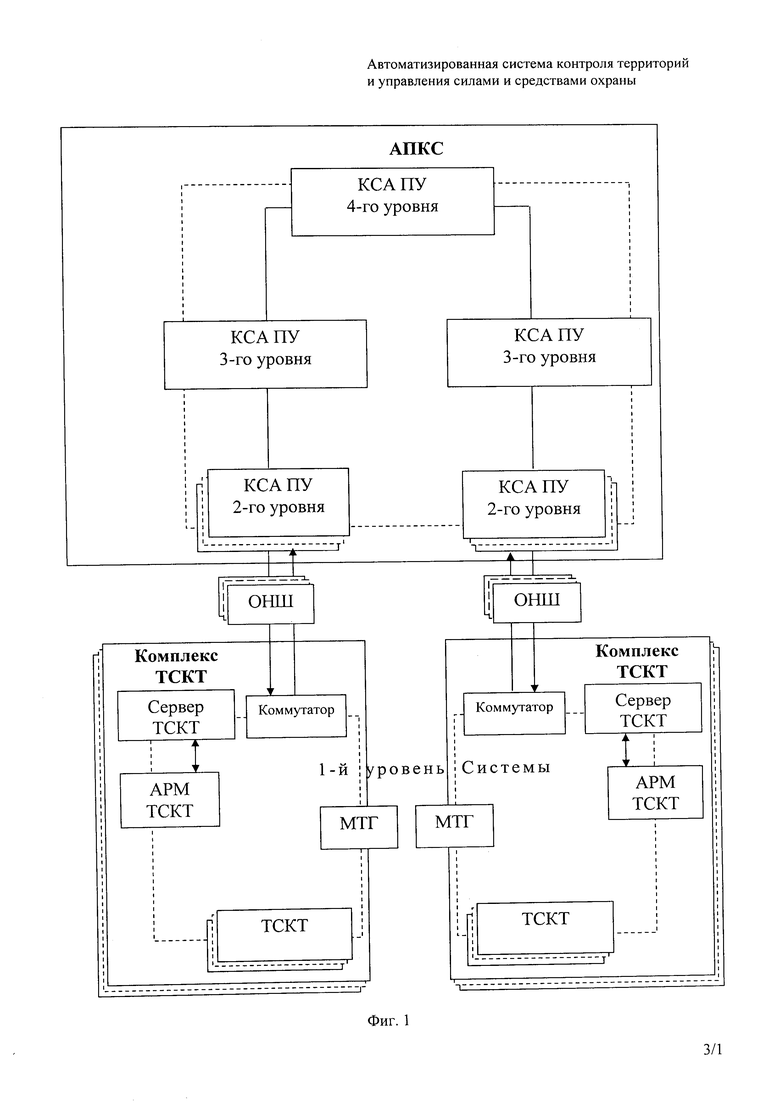
На фиг. 3 показан состав КСА пункта управления второго уровня (ПУ-2):
- АРМ руководителя 14;
- АРМ дежурного оператора 15;
- АРМ должностного лица 16;
- коммутатор ЛВС 17;
- СБД третьего уровня 18.
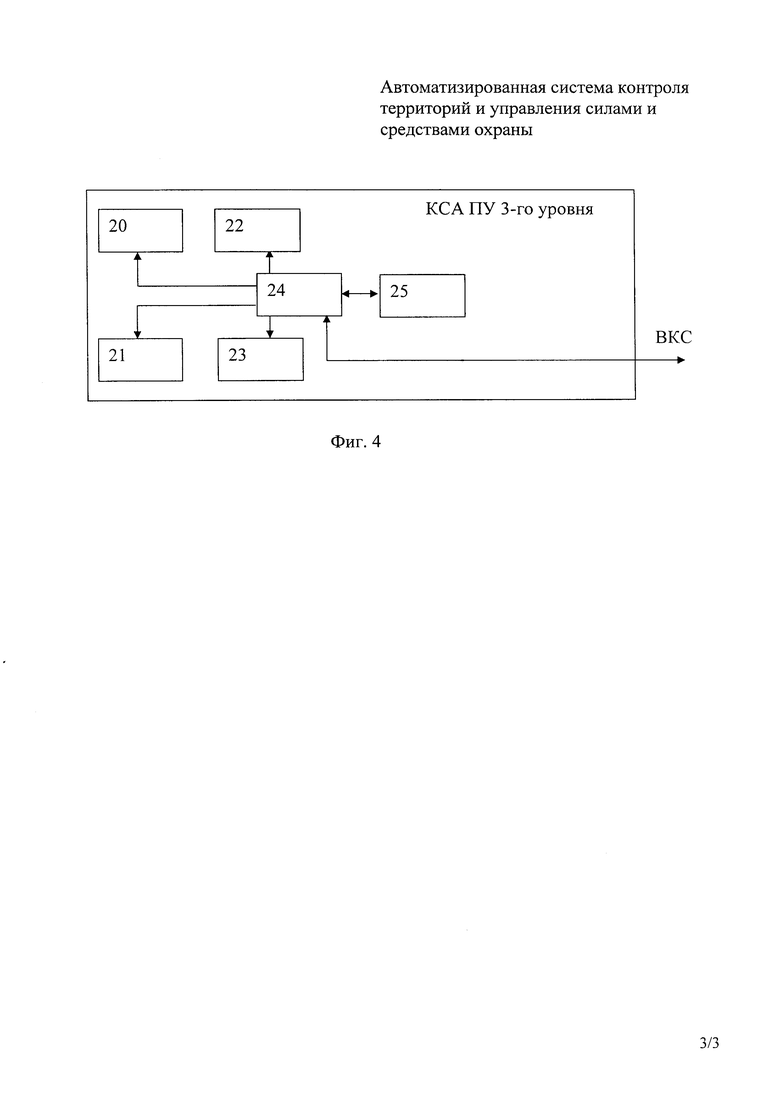
На фиг. 4 показан состав КСА пункта управления третьего уровня (ПУ-3):
- экран коллективного пользования 19;
- АРМ руководителя 20;
- АРМ дежурного оператора 21
- АРМ должностных лиц 22;
- коммутатор ЛВС 23;
- СБД третьего уровня 24.
На фиг. 5 показан состав КСА пункта управления четвертого уровня (ПУ-4):
- экран коллективного пользования 25;
- АРМ руководителя 26;
- АРМ дежурного оператора 27
- АРМ должностных лиц 28;
- коммутатор локальной вычислительной сети (ЛВС) 29;
- сервер базы данных (СБД) четвертого уровня 30.
Коммутаторы (17), (23) и (29) второго, третьего и четвертого уровней Системы предназначены для организации обмена информацией как в локальных вычислительных сетях, так и между автоматизированными пунктами управления разных уровней по выделенным каналам связи (ВКС).
Описание функционального назначения и работы составных частей Системы.
ТСКТ разворачиваются на контролируемых территориях (на территории охраняемых объектов) в строго определенных местах с учетом рельефа местности и физико-географических условий. Информация от них поступает на сервер ТСКТ по каналам радиорелейной и УКВ радиосвязи для первичной ее обработки и далее через ОНШ на ПУ-2, где осуществляется ее прием, хранение, обработка, предоставление должностным лицам ПУ-2 и передача на вышестоящие пункты управления по установленным каналам связи.
Распорядительная информация с вышестоящих пунктов управления может быть доведена до исполнителей по тем же каналам связи.
Каналы связи и специальное программное обеспечение объединяют КСА пунктов управления второго, третьего и четвертого уровней Системы в АПКС и обеспечивают ему выполнение следующих функций:
- автоматизированный (автоматический) сбор информации от ТСКТ, ее хранение, обработку и представление должностным лицам ПУ;
- автоматизированное (автоматическое) поддержание баз данных, необходимых для осуществления контроля обстановки на контролируемых территориях (объектах), формирования имитационной модели складывающейся обстановки на контролируемых территориях (объектах) для адекватного решения задачи по ее реализации;
- автоматизированное (автоматическое) отображение текущей обстановки на контролируемых территориях (охраняемых объектах) и прогнозирование ее изменений;
- автоматизированная оценка обстановки на контролируемых территориях (охраняемых объектах) и выработка рекомендаций должностным лицам по ее реализации в случаях нарушения режима контролируемых территорий (охраняемых объектов);
- автоматизированная информационно-аналитическая поддержка принятия решения на реализацию обстановки и постановка задач силам и средствам охраны;
- автоматизированная выдача вышестоящими пунктами управления распоряжений в режиме «on line» подчиненным пунктам управления;
- автоматизированная выдача данных целеуказания мобильным тревожным группам, а также БПЛА для наведения их на цель в ходе реализации обстановки;
- автоматизированный обмен с подчиненными пунктами управления командами, сигналами, а также подтверждениями об их получении;
- автоматическое документирование входящей и исходящей информации.
Передаваемая ТСКТ информация позволяет дежурному оператору ПУ-2 фиксировать факт нарушения режима контролируемой территории (охраняемых объектов), распознавать нарушителей режима, определять их тип, направления и параметры движения. Данные сохраняются в базе данных пункта управления второго уровня и передаются на 3-й и 4-й уровни Системы, где отображаются на мониторах АРМ дежурных операторов, анализируются ими, при этом из общего потока информации выделяется необходимая информация, предназначенная для высшего уровня управления, в том числе для государственных специальных органов.
Для исключения попадания информации, циркулирующей в КСА пунктов управления, а также для обеспечения возможности передачи команд управления на МТГ и БПЛА аппаратно-программный комплекс системы отделен от комплекса ТСКТ однонаправленными шлюзами 11, пропускающими информацию только в одном направлении.
Для обеспечения функций контроля территорий и освещения обстановки на охраняемых объектах комплексы ТСКТ включают стационарные и автономные посты технического наблюдения, оснащенные радиолокационными (радиолокационно-оптическими) модулями (СПТН с РЛМ, СПТН РЛОМ, ΑΠΤΗ РЛОМ) и ΑΠΤΗ с оптико-электронными модулями (ΑΠΤΗ ОЭМ).
Радиолокационные модули (РЛМ) осуществляют мониторинг наземной обстановки на контролируемых территориях (охраняемых объектах) в зоне ответственности органов управления нижнего звена, обнаружение, автоматический захват и сопровождение нарушителей режима контролируемых территорий (охраняемых объектов), передачу первичной радиолокационной информации в цифровом формате по установленным каналам связи на ПУ-2.
Оптико-электронные модули (ОЭМ), включающие в свой состав телевизионные и тепловизорные камеры и аппаратно-программный комплекс, используются для доразведки обнаруженных РЛМ нарушителей режима контролируемых территорий (охраняемых объектов) с целью их распознавания. Доразведка нарушителей осуществляется путем наведения оптической оси ОЭМ по данным целеуказания от КТСКТ и выдачи видеоинформации по нарушителю на ПУ-2 для последующего их распознавания дежурным оператором.
ΑΠΤΗ с РЛОМ и ОЭМ имеют автономные источники электропитания, абонентские комплекты аппаратуры связи и передачи данных, средства обеспечения собственной безопасности для формирования и выдачи на ПУ-2 сигналов о несанкционированном доступе к ним.
Для оперативного расширения зон контроля на направлениях вероятного движения нарушителей на участках контролируемых территорий (охраняемых объектов), где применение ΑΠΤΗ нецелесообразно и неэффективно, в состав комплексов ТСКТ могут быть включены мобильные посты технического наблюдения, а также ТСКТ воздушного базирования, в том числе размещаемые на БПЛА.
Для контроля протяженных участков местности на вероятных направлениях движения нарушителей в местах, которые не просматриваются РЛМ, используются сигнализационные, в том числе магнитометрические и сейсмомагнитометрические, средства обнаружения.
При необходимости состав комплексов ТСКТ может быть дополнен другими, в том числе внешними, информационно совместимыми с ними источниками информации.
Таким образом, особенностью предлагаемой Системы является автоматизированное комплексное применение известных ТСКТ для мониторинга обстановки на контролируемых территориях (охраняемых объектах) и передачи информации о ней в АПКС, реализующий функции сбора информации об обстановке на объектах, ее хранения, обработки и представления должностным лицам пунктов управления, автоматизированной оценки обстановки, поддержки принятия решения на основе имитационного моделирования ситуации, а также автоматизированного доведения решения до исполнителей на реализацию обстановки и обеспечение контроля выполнения поставленных задач.
Заявителю не удалось в открытых источниках информации обнаружить описание подобных систем с аналогичным составом реализуемых функций, что является признаком новизны предлагаемого технического решения задачи.
Список литературы
1. Garvy, Patrick J., Mancini, George P., Bockisch, Paul R., Berezowski, Andrew G. Internet facilitated fire alarm monitoring, control system and method. Патент США №7227450, заявка №10/800368 от 12.03.2004. МПК G08B 17/00 (2006/01);
2. Буда Н.И., Курочкин К.В. Система мониторинга. Патент РФ №2460144, заявка 2010124140/08 от 11.06.2010. МПК G08B 25/00 (2006.01).
| название | год | авторы | номер документа |
|---|---|---|---|
| Интегрированный комплекс физической защиты периметров и территорий объектов | 2019 |
|
RU2726942C1 |
| Малообслуживаемая система физической защиты объектов | 2018 |
|
RU2708509C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС ИНЖЕНЕРНО-ТЕХНИЧЕСКИХ СРЕДСТВ ОХРАНЫ "ПОСТ" И СПОСОБ ЕГО РАБОТЫ | 2017 |
|
RU2647630C1 |
| ПОДВИЖНАЯ АВТОМАТИЗИРОВАННАЯ МАШИНА СВЯЗИ И УПРАВЛЕНИЯ РОБОТЕХНИЧЕСКИМ КОМПЛЕКСОМ | 2021 |
|
RU2762624C1 |
| Радиолокационный комплекс раннего обнаружения нарушителей для охраны объекта | 2018 |
|
RU2695412C1 |
| АВТОМАТИЗИРОВАННАЯ ОПЕРАЦИОННО-ИНФОРМАЦИОННАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДГОТОВКИ И ПРОВЕДЕНИЯ ГОЛОСОВАНИЯ | 2005 |
|
RU2303816C2 |
| МОБИЛЬНЫЙ КОМПЛЕКС СВЯЗИ И УПРАВЛЕНИЯ | 2020 |
|
RU2739067C1 |
| Система диспетчерской централизации железной дороги | 2019 |
|
RU2728199C1 |
| СЕТЕВАЯ АВТОМАТИЗИРОВАННАЯ СИСТЕМА ПЕРЕДАЧИ РАДИОЛОКАЦИОННОЙ ИНФОРМАЦИИ | 2013 |
|
RU2543068C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ РАДИОЭЛЕКТРОННЫМИ СРЕДСТВАМИ ВОЕННЫХ ОБЪЕКТОВ | 2007 |
|
RU2342793C1 |
Изобретение относится к системе контроля территорий и управления силами и средствами охраны. Технический результат заключается в автоматизации управления средствами охраны. Система содержит комплекс технических средств контроля территории (КТСКТ) 1-го уровня, состоящий из технических средств контроля территорий (ТСКТ), стационарных, автономных и мобильных постов контроля территории, автоматизированного рабочего места (АРМ) оператора ТСКТ, сервера ТСКТ, коммутатора связи и средств связи, и многоуровневый аппаратно-программный комплекс системы (АПКС), состоящий из территориально распределенных и иерархически связанных комплексов средств автоматизации (КСА) в виде совокупности АРМ должностных лиц и сервера баз данных, объединенных каналами средств связи в составе пункта управления (ПУ) 2-го уровня, содержащего АРМ руководителя, дежурного оператора, должностного лица, коммутатор локальной вычислительной сети, средства визуального отображения информации, сервер базы данных о нарушениях режима контролируемых территорий, средства передачи информации и ПУ 3-го уровня, содержащего АРМ руководителя, дежурного оператора, должностных лиц, средства отображения информации, коммутатор ЛВС, сервер базы данных, при этом АПКС отделен от КТСКТ однонаправленным шлюзом. 2 з.п. ф-лы, 5 ил.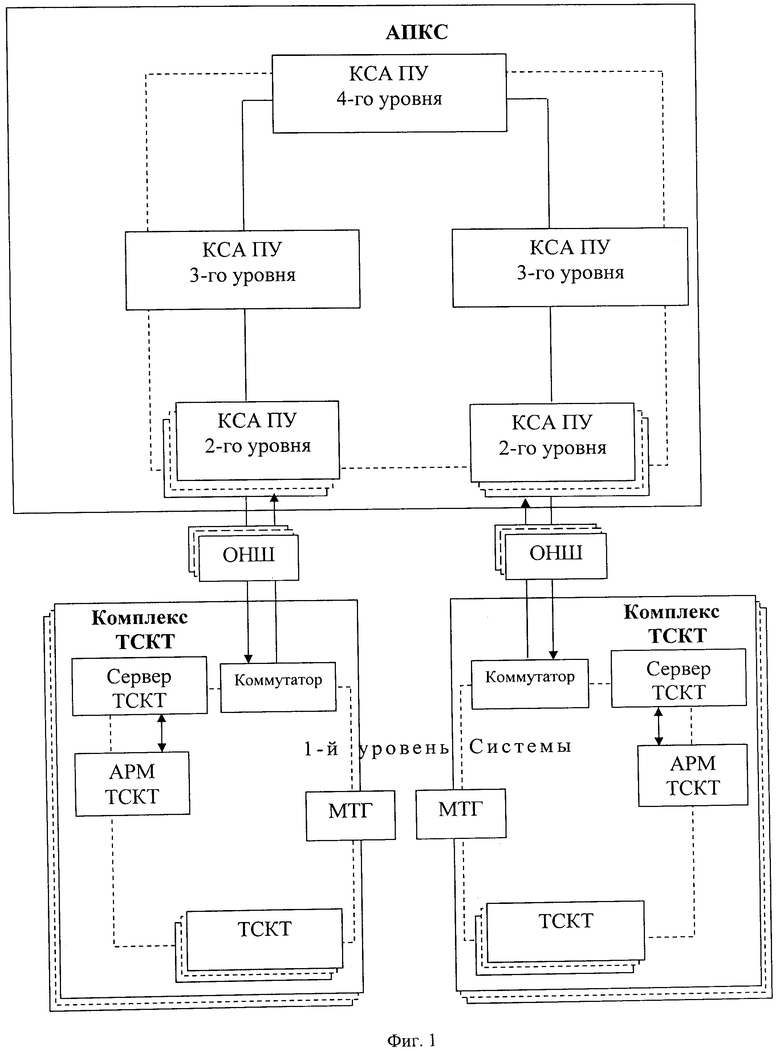
1. Автоматизированная система контроля территорий и управления силами и средствами охраны (Система), представляющая собой 3-уровневую иерархическую структуру, включающую комплекс технических средств контроля территории (КТСКТ) 1-го уровня иерархической структуры Системы, расположенный непосредственно на контролируемой территории и состоящий из технических средств контроля территорий (ТСКТ), стационарных, автономных и мобильных постов контроля территории, работающих под управлением единой программы автоматического сбора и обработки информации, АРМ оператора ТСКТ, сервера ТСКТ, коммутатора связи и средств связи, и многоуровневый аппаратно-программный комплекс системы (АПКС), состоящий из территориально распределенных и иерархически связанных комплексов средств автоматизации (КСА) в виде совокупности автоматизированных рабочих мест (АРМ) должностных лиц и сервера баз данных с комплектами установленного на них общего программного обеспечения и объединенных каналами средств связи в составе пункта управления (ПУ) 2-го уровня иерархической структуры Системы, расположенного вне охраняемой территория и содержащего АРМ руководителя, АРМ дежурного оператора, АРМ должностного лица, коммутатор локальной вычислительной сети (ЛВС) средства приема и визуального отображения информации, полученной через среду передачи от 1-го уровня иерархической структуры Системы, сервер базы данных о нарушениях режима контролируемых территорий, средства передачи информации и пункта управления (ПУ) 3-го уровня иерархической структуры Системы, расположенного вне охраняемой территории и содержащего автоматические рабочие места (АРМ) руководителя, дежурного оператора, должностных лиц, оборудованные средствами отображения поступающей с 1-го и 2-го уровней информации о состоянии контролируемого объекта с возможностью привязки изображения к цифровой карте местности, а также коммутатор ЛВС, сервер базы данных, хранящий информацию, полученную с 1-го и 2-го уровня Системы с возможностью извлечения из базы данных информации для формирования имитационной модели возможных перемещений нарушителя на всей контролируемой территории, отличающаяся тем, что информация, поступающая от ТСКТ 1-го уровня в пункт управления 2-го уровня, содержащая сведения о типе, направлении и параметрах движения нарушителя, сохраняется в базе данных пункта управления 2-го уровня, при этом из общего потока информации выделяется необходимая информация, которая направляется в пункт управления 3-го уровня, а из пункта управления 3-го уровня на 2-й и 1-й уровни по выделенным каналам связи поступает распорядительная информация от лиц, принимающих решение, в зоне ответственности которых находится контролируемая территория, а также команды управления и целеуказания на ТСКС 1-го уровня, при этом АПКС отделен от комплекса ТСКТ однонаправленным шлюзом.
2. Система по п. 1, отличающаяся тем, что комплексы ТСКТ содержат радиолокационные, радиолокационно-оптические и оптико-электронные модули, размещаемые на стационарных, автономных и мобильных постах технического наблюдения, сигнализационные, в том числе магнитометрические и сейсмомагнитометрические средства обнаружения, разворачиваемые в местах вне зон видимости радиолокационных и радиолокационно-оптических модулей, ТСКТ воздушного базирования, в том числе на БПЛА.
3. Система по п. 1, отличающаяся тем, что движение информационных потоков осуществляется по проводным, радиорелейным, ультракоротковолновым каналам связи.
| СИСТЕМА МОНИТОРИНГА | 2010 |
|
RU2460144C2 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| US 7227450 B2, 05.06.2007 | |||
| CN 101388130 A, 18.03.2009. | |||

