Заявленное изобретение относится к области охранной сигнализации, а именно к системам охраны объектов и их периметра, а также к информационным мониторинговым системам. Может быть использовано для всесуточного и всепогодного обнаружения подвижных нарушителей, в том числе в условиях арктических пустынь, на расстояниях обеспечивающих безопасность объекта от поражения стрелковым оружием и другим переносным вооружением.
Аналогом заявленного технического решения является «Мобильный комплекс технических средств охраны» (см. патент RU №2427039, МПК G08B 13/19, опубл. 20.08.2011 г. - [1]), в котором раннее (заблаговременное) обнаружение нарушителя, наведение и сопровождение в автоматическом режиме на всем протяжении контролируемого наземного и воздушного пространства осуществляется оптико-электронными средствами объемно-кругового обзора на основе телевизионной, включая управляемый поисковый прожектор и тепловизионной аппаратуры. Для реализации заданных функций аналог [1] содержит пункт управления и периметровую охранную систему, состоящую из периметровых средств обнаружения (СО) и периметровых оптикоэлектронных СО, имеющих в своем составе связные радиопередатчики и автономные источники питания и передающие информацию по радиоканалу в размещаемую в пункте управления систему сбора, обработки и представления информации. При этом для наблюдения и создания непрерывных замкнутых зон обнаружения вдоль периметра охраняемой территории применяются двухпозиционные радиолучевые СО совместно со СО, основанными на иных физических принципах.
Недостатком известного мобильного комплекса технических средств охраны [1] является отсутствие возможностей одновременного сопровождения и идентификации нескольких нарушителей на удалении от объекта, автоматического распознавания класса обнаруживаемой нарушителей, а также невысокая надежность по раннему обнаружению целей при выходе из строя одного из периметровых оптикоэлектронных средств наблюдения.
Прототипом по совокупности признаков к заявленному техническому решению является «Радиолокационная система охраны объекта с малокадровой системой видеонаблюдения и оптимальной численностью сил охраны» (см. патент RU №2595532, МПК G08B 25/00, G08B 19/00, G01S 3/72, опубл. 27.08.2016 г. - [2]), которая содержит основной разведывательно-радиолокационный контур (РРК) из радиолокационных станций (РЛС), расположенных по периметру охраняемого объекта. Каждая из РЛС состоит из устройства обнаружения, устройства распознавания, устройства памяти с библиотекой нарушителей, при этом в каждой РЛС устройство обнаружения соединено с устройством распознавания, которое, в свою очередь, соединено с устройством памяти с библиотекой нарушителей, в состав каждой РЛС включен адресуемый буфер, соединенный с устройством памяти с библиотекой нарушителей, а также с коммутатором центрального пульта охраны (ЦПО), который содержит автоматизированные рабочие места (АРМ) операторов, коммутатор. Между собой РЛС и ЦПО соединены линиями связи.
При этом для реализации функции обнаружения нарушителя прототип [2] содержит следующие группы аппаратуры: комплект СО, работающих на разных физических принципах (РЛС, видеокамер и тепловизоров) при условии наличия в комплекте СО хотя бы одной РЛС, линии связи, ЦПО, АРМ операторов в составе ЦПО, коммутатор и стационарный терминал ЦПО. РЛС являются СО, которые включают в себя устройство обнаружения, устройство распознавания, устройство памяти с библиотекой нарушителей, управляемое адресуемое поворотное устройство. В каждом СО устройство обнаружения соединено с устройством распознавания, которое, в свою очередь, соединено с устройством памяти с библиотекой нарушителей. В состав каждого СО включен адресуемый буфер, соединенный с устройством памяти с библиотекой нарушителей, а также с коммутатором центрального пульта охраны. ЦПО содержит АРМ операторов ЦПО, коммутатор, выполненный с возможностью подключения к каждому АРМ. В состав каждого АРМ включен терминал наблюдения. Линия связи между СО и ЦПО является обычной, с полосой пропускания от 3 кГц двухпроводной линией связи. РЛС применены в качестве основных СО. РЛС устанавливают так, чтобы обеспечить радиолокационное наблюдение за прилегающей к объекту охраны территорией и территорией самого объекта. Управляемое адресуемое поворотное устройство РЛС работает автономно под управлением программы, заложенной в это устройство. В соответствии с управляющими командами устройства распознавания соответствующей РЛС управляемое адресуемое поворотное устройство оптического средства обеспечивает наведение устройства обнаружения (объектива) на нарушителя. Сигналы от нарушителя в цифровом формате из устройств обнаружения поступают в соответствующие устройства распознавания, связанные с устройством памяти с библиотекой нарушителей. Распознавание и классификация нарушителей в устройстве распознавания происходит программным путем поиска по определенному алгоритму. Изображение и параметры распознавания нового нарушителя с указанием расстояния до него заносятся в устройство памяти с библиотекой нарушителей с возможностью последующего использования этих параметров при распознавании последующих нарушителей. Параметры распознавания нарушителя или тревожной ситуации одновременно с записью в устройство памяти с библиотекой нарушителей записываются совместно с изображением нового нарушителя или тревожной ситуации в адресуемый буфер каждого СО. Далее адресный буфер инициирует процесс выдачи кадров изображения в пункт приема. Изображения нарушителей с параметрами распознавания от адресуемых буферов передаются по обычной (с полосой пропускания от 3 кГц) двухпроводной второй линии связи - в коммутатор ЦПО. В коммутаторе информация от СО распределяется в устройства дополнительного распознавания тех АРМ, с которыми СО предназначены для совместной работы. В устройстве дополнительного распознавания поступившие сигналы подвергаются дополнительной обработке по распознаванию и классификации нарушителей. Параметры корректировки направляются в соответствующие устройства памяти с библиотеками нарушителей через адресуемый буфер соответствующего СО, а результаты уточненной классификации и изображения нарушителей или их отметки - на терминалы наблюдения АРМ. На отображаемых на терминалах наблюдения карте местности и плане объекта, оператор наносит виртуальные рубежи охраны по периметру объекта и рубежи предупреждения, а также границы внутренних охраняемых зон. Рубежи предупреждения наносятся перед основными рубежами охраны с наружной стороны периметра объекта или зоны. При обнаружении подвижных целей их траектория отображается на терминалах наблюдения.
Прототип [2] имеет недостаточную эффективность, выражающуюся в том, что в нем предусмотрена установка РЛС таким образом, чтобы обеспечить радиолокационное наблюдение за прилегающей к объекту охраны территорией и территорией самого объекта. Однако, в данном случае движущиеся нарушители, не являющиеся группами силового реагирования, но относящиеся к персоналу объекта, находящиеся на территории охраняемого объекта на терминале наблюдения могут ошибочно отображаться как нарушители. Данный вариант развития событий можно разрешить, назначив соответствующее разграничение охраняемых зон на терминале наблюдения. Но в таком случае, нарушитель, покинувший границу охраняемой зоны на терминале наблюдения, не будет отражаться как нарушитель.
Кроме того, существенным недостатком прототипа [2], снижающим его эффективность является необходимость увеличения количества оптических средств для реализации возможности распознавания несколько одновременно появляющихся нарушителей, а также значительное снижение возможностей средств обнаружения в целом по обнаружению и идентификации подвижных нарушителей в неблагоприятных погодных условиях при обильных осадках, туманах и т.д.
Таким образом, указанные недостатки аналога и прототипа ставят задачу повышения эффективности, путем осуществления обнаружения, идентификации и сопровождения нескольких одновременно возникающих нарушителей с разных направлений, сохранения границ зоны обнаружения системы охраны объекта при неблагоприятных погодных условиях, обеспечения достоверности получаемой информации и надежности работы системы охраны объекта.
Сущность заявленного технического решения состоит в том, что радиолокационный комплекс раннего обнаружения нарушителей для охраны объекта содержит основной разведывательно-радиолокационный контур (РРК) из РЛС, расположенных по периметру охраняемого объекта, каждая из РЛС состоит из устройства обнаружения, устройства распознавания, устройства памяти с библиотекой нарушителей, управляемого адресуемого поворотного устройства, при этом в каждой РЛС устройство обнаружения соединено с устройством распознавания, которое, в свою очередь, соединено с устройством памяти с библиотекой нарушителей, в состав каждой радиолокационной станции включен адресуемый буфер, соединенный с устройством памяти с библиотекой нарушителей, а также с коммутатором центрального пульта охраны (ЦПО), который содержит автоматизированные рабочие места операторов, коммутатор, между собой радиолокационные станции и центральный пульт охраны соединены линиями связи. В РЛС раннего обнаружения нарушителей для охраны объекта введен дополнительный, аналогичный основному РРК РЛС, распределенных по периметру охраняемого объекта, фронтом к прилегающей территории, при этом зоны видимости двух соседних РЛС обоих РРК РЛС имеют взаимное перекрытие, так что в районе точки, являющейся основанием перпендикуляра, проведенного от точки пересечения радиусов, характеризующих максимальные дальности обнаружения двух соседних РЛС, к прямой, соединяющей их позиции, находится РЛС дополнительного РРК, в каждой РЛС адресный буфер соединен с устройством обнаружения для обмена сигналами управления между РЛС и ЦПО, соединен отдельным каналом с устройством распознавания, в ЦПО введен центр обработки информации, РЛС основного и дополнительного РРК РЛС соединены между собой отдельными линиями связи, по которым осуществлен обмен сигналами управления между ними и ЦПО, а также по этим отдельным линиям связи осуществлена передача информации об обнаруженных нарушителях с каждой РЛС в центр обработки информации для совместной обработки, обмен информационными сигналами и сигналами управления между двумя РРК осуществляется через коммутатор центрального пульта охраны.
Технический результат заявленного «радиолокационного комплекса раннего обнаружения нарушителей для охраны объекта» состоит в повышении эффективности функционирования системы охраны объекта в различных погодных условиях. Технический результат достигается путем введения многопозиционной (распределенной) двухконтурной радиолокационной системы с резервированием радиолокационных станций, осуществляющей автоматическое наблюдение, обнаружение, распознавание одного или нескольких движущихся нарушителей со всех направлений к охраняемому объекту в различных погодных условиях, на расстояниях обеспечивающих своевременное реагирование силами охраны и недопущение дистанционного вооруженного воздействия на объект.
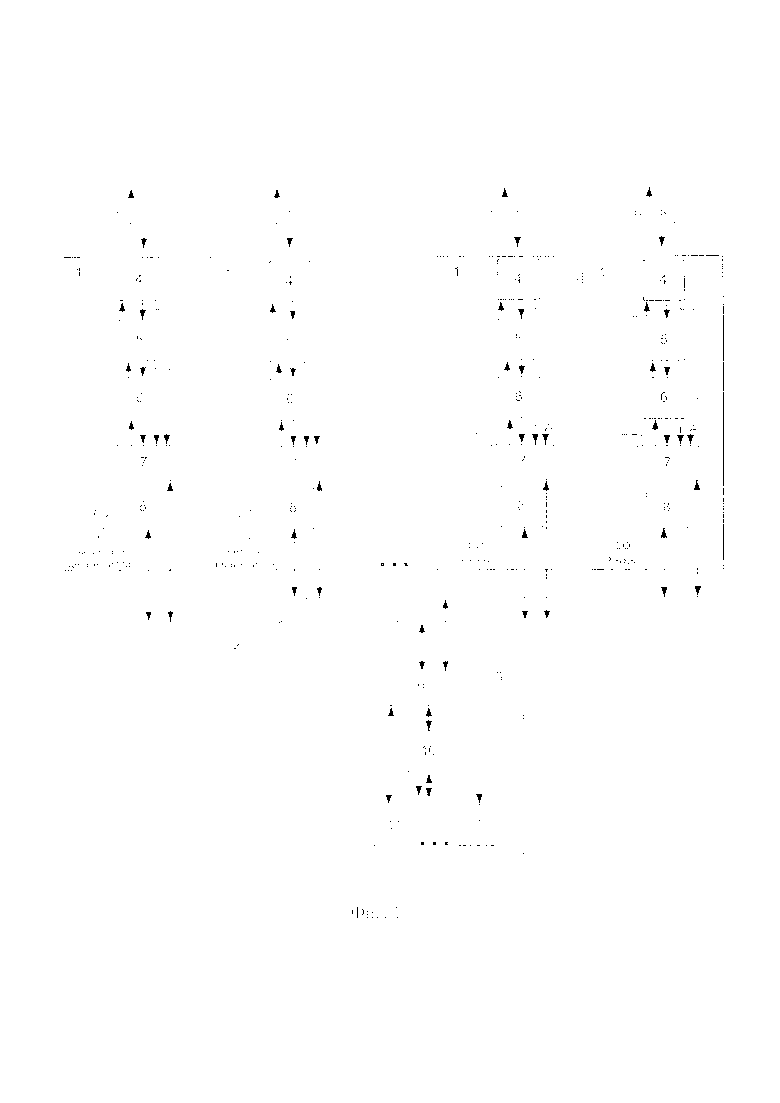
На фигуре 1 представлена структурная схема заявленного радиолокационного комплекса раннего обнаружения нарушителей для охраны объекта.
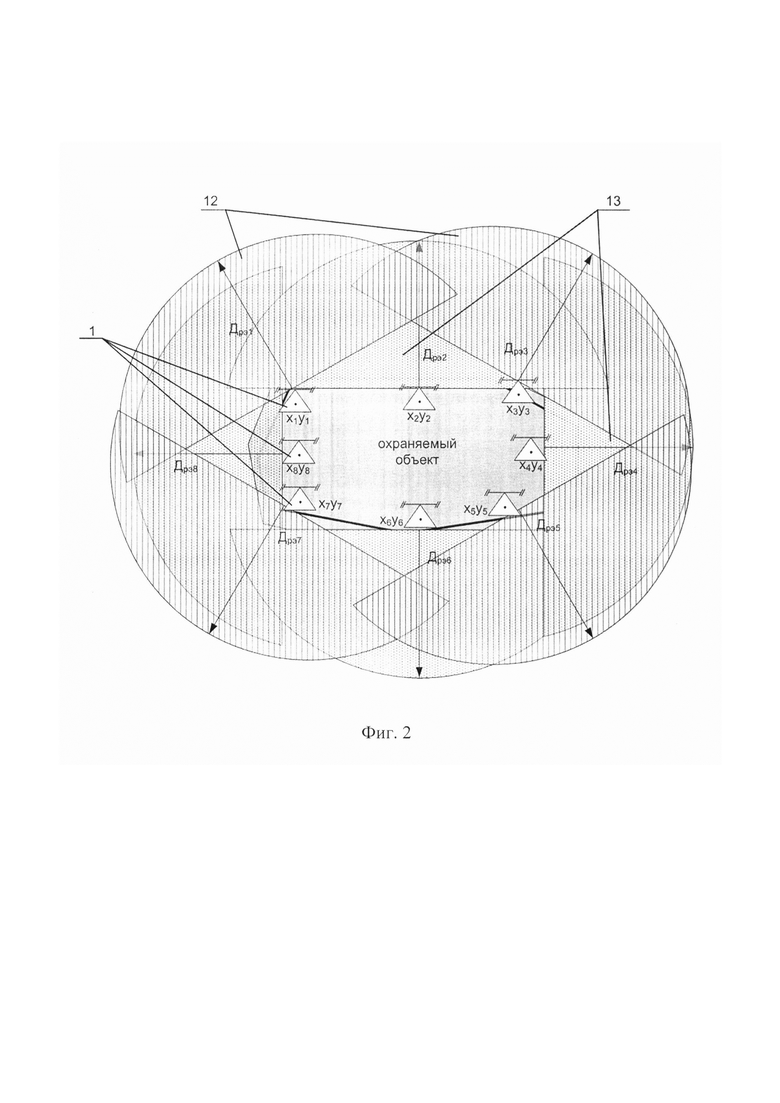
На фигуре 2 - эскиз варианта исполнения заявленного радиолокационного комплекса раннего обнаружения нарушителей для охраны объекта.
На фиг. 1 и фиг. 2 обозначены:
1 - радиолокационная станция (РЛС); 2 - линия связи; 3 - центральный пульт охраны (ЦПО); 4 - устройство обнаружения; 5 - устройство распознавания; 6 - устройство памяти с библиотекой нарушителей; 7 - адресуемый буфер; 8 - управляемое адресуемое поворотное устройство; 9 - коммутатор; 10 - центр обработки информации (ЦОИ); 11 - автоматическое рабочее место (АРМ); 12 - зона видимости РЛС основного РРК; 13 - зона видимости РЛС дополнительного РРК.
Устройство содержит основной РРК из однопозиционных приемопередающих РЛС (1) секторного обзора, расположенных по периметру охраняемого объекта. Возможности РЛС по обнаружению подвижных целей в плохих погодных условиях превосходят другие средства обнаружения по дальности действия (по сравнению с оптическими, оптико-электронными СО), а также по стоимости охраны погонного (квадратного) метра прилегающей территории объекта (сейсмические, емкостные, магнитные СО). Именно поэтому в качестве средств раннего обнаружения выбраны РЛС. Для достижения технического результата могут применятся, например, малогабаритные импульсные РЛС секторного обзора с механическим или электронным управлением диаграммой направленности с дальностью обнаружения типовых целей «человек» до 8 км. РЛС (1) состоят из устройства обнаружения (4), устройства распознавания (5), устройства памяти с библиотекой нарушителей (6), управляемого адресуемого поворотного устройства (8). Устройство обнаружения (4) представляет собой приемопередающее устройство, выполненное с возможностью зондирования прилегающего пространства электромагнитным излучением сверхвысокой частоты (СВЧ), приема отраженных сигналов, усиления принятых отраженных сигналов, выделения подвижных объектов, преобразования полученных сигналов в цифровой формат. В каждой РЛС (1) устройство обнаружения (4) соединено с устройством распознавания (5), которое, в свою очередь, соединено с устройством памяти с библиотекой нарушителей (6). В состав каждой РЛС (1) включен адресуемый буфер (7), соединенный с устройством памяти с библиотекой нарушителей (6), а также с коммутатором (9) центрального пульта охраны (3), который содержит АРМ операторов (11), коммутатор (9). Между собой РЛС (1) и ЦПО (3) соединены линиями связи (2). Введен дополнительный, аналогичный основному РРК РЛС, распределенных по периметру охраняемого объекта, фронтом к прилегающей территории, при этом зоны видимости (12. 13) двух соседних РЛС (1) обоих РРК РЛС имеют взаимное перекрытие, так что в районе точки, являющейся основанием перпендикуляра, проведенного от точки пересечения радиусов, характеризующих максимальные дальности (Дpэi(j)) обнаружения двух соседних РЛС, к прямой, соединяющей их позиции (xi, yi), находится РЛС (1) дополнительного РРК. В каждой РЛС (1) адресный буфер (7) соединен с устройством обнаружения (4) для обмена сигналами управления между РЛС (1) и ЦПО (3), соединен отдельными каналами с устройством распознавания (5). В ЦПО введен центр обработки информации (ЦОИ) (10). РЛС основного и дополнительного РРК РЛС (1) соединены между собой отдельными линиями связи (2), по которым осуществлен обмен сигналами управления между ними и ЦПО (3), а также по этим отдельным линиям связи (2) осуществлена передача информации с каждой РЛС (1) в ЦОИ (10) для совместной обработки. Таким образом, информация об обнаруженных целях поступает в ЦОИ с позиций РЛС обоих РРК параллельно. Обмен информационными сигналами и сигналами управления между двумя контурами осуществляется через коммутатор (9) ЦПО (3). За счет этого образована двухконтурная многопозиционная (распределенная) систему РЛС с автономным приемом сигналов. Заявленное техническое решение является многопозиционным (распределенным) радиолокационным комплексом (системой), позволяющим более эффективно использовать информацию, заключенную в пространственных характеристиках электромагнитного поля, получаемых из нескольких разнесенных зон видимости отдельных РЛС. Этим повышается информативность, помехозащищенность, живучесть РЛС, см. Черняк B.C. Многопозиционная радиолокация. - М.: Радио и связь. - 1993. - 416 с. - [3]. Поэтому для решения задачи раннего обнаружения нарушителей в различных погодных условиях в заявленном техническом решении предлагается многопозиционный (распределенный) радиолокационный комплекс для обнаружения наземных подвижных нарушителей. Комплекс является пространственно-некогерентным, с автономным приемом сигналов и частичной децентрализацией управления. Из анализа существующего уровня техника заявленный комплекс с указанными характеристиками является реализуемым, и имеет по сравнению с аналогами лучшие характеристики.
Работа заявленного комплекса поясняется структурной схемой, подставленной на фиг. 1, а также вариантом исполнения заявленного радиолокационного комплекса раннего обнаружения нарушителей для охраны объекта, представленном на фиг. 2.
В дежурном режиме каждая отдельная позиция (xiyi) РЛС (1) основного РРК работает автономно, осуществляя обзор заданного сектора (12). В случае обнаружения подвижных нарушителей, РЛС переходит в режим разведки, берет цель на автосопровождение и автоматически с устройства обнаружения (4) через адресуемый буфер (7) на линию связи, коммутатор (9) и в ЦОИ (10) подается в цифровом формате сигнал об обнаруженной цели. При этом соединенные между собой линией (2) связи РЛС (1) основного РРК осуществляют обмен сигналами управления между собой и ЦПО (3), а также по этой линии связи (2) происходит передача информации с каждой РЛС (1) в ЦОИ (10) для совместной обработки. Дополнительный РРК аналогичен основному, при этом обмен сигналами (управления и информационными) между двумя РРК осуществляется через коммутатор (9) ЦПО (3). После обнаружения нарушителя (нарушителей) одной из РЛС основного РРК, в соответствии со схемой размещения позиций РЛС подается сигнал управления из ЦОИ (10) через коммутатор (9), адресуемый буфер (7) на устройство обнаружение (4) соседней РЛС (1) основного РРК либо (и) РЛС дополнительного РРК (xjyj) на доразведку нарушителя (нарушителей). Для РЛС (1) дополнительного РРК (xjyj) данный сигнал кроме того является сигналом запуска.
Распознавание нарушителя (нарушителей) в устройстве распознавания (5) происходит путем поиска по определенному алгоритму в устройстве памяти с библиотекой нарушителей (6) заранее записанных параметров распознавания целей и их сопоставление с параметрами распознавания вновь обнаруженного подвижного объекта.
Принимаемые сигналы об обнаруженном нарушителе (нарушителях) после обработки на отдельных позициях РЛС (1) в цифровом формате с устройства распознавания (8) через линию связи (2) поступают на вход ЦОИ (13), где осуществляется их совместная обработка, выработка решения об истинности (ложности) нарушителя, идентификация (распознавание), а также расчет параметров нарушителя (координаты, скорость, направление движения). Информация с устройств обнаружения (4) отдельных позиций РЛС (1) также поступает на вход ЦОИ (10), где используется для совместной обработки. Совместная обработка информации в ЦОИ (10), полученной с разных позиций РЛС может осуществляться различными методами, например объединением единичных замеров. Выбор метода объединения информации ограничивается пропускной способностью линий передачи данных.
ЦОИ (10) представляет собой мощный вычислительный комплекс, способный осуществлять одновременный прием информации об обнаруженных нарушителях с устройств обнаружения (4), распознанных нарушителей с устройств распознавания (5) отдельных позиций РЛС (1) обоих РРК, совместную обработку полученной информации по заданному алгоритму, дополнительное распознавание нарушителей, выдачу сигналов управления на отдельные позиции РЛС (1) обоих РРК в соответствии со складывающейся обстановкой на доразведку нарушителей.
Выходная информация с ЦОИ (10) поступает на терминалы наблюдения АРМ (11) операторов. АРМ (11) представляют собой персональные компьютеры с установленным программным обеспечением, отображающим карту местности, зоны видимости обоих РРК (12, 13), зоны видимости каждой РЛС, их режимы работы, а также информацию об обнаруженных нарушителях (класс, координаты, скорость, направление движения нарушителей и др.). На терминалах наблюдения установленное программное обеспечение позволяет осуществлять наблюдение, как за всей формируемой зоной видимости, так и с приближением отдельных участков местности.
Отличительной особенностью заявленного радиолокационного комплекса является то, что для передачи управляющих сигналов и информации о параметрах цели используются отдельные каналы связи между адресным буфером и устройством обнаружения, устройством распознавания. При этом, выход устройства обнаружения приемной системы соединен со входом устройства распознавания, а также со входом адресуемого буфера для передачи информации об обнаруженной цели по линии связи на коммутатор ЦПО. Устройство распознавания соединено с устройством памяти с библиотекой нарушителей, а также с адресуемым буфером для передачи информации о распознанной цели по линии связи на коммутатор ЦПО. Данное разделение информации (нарушитель обнаружен, либо нарушитель распознан) необходимо для эффективной работы всего комплекса в различных погодных условиях, в том числе, когда одна РЛС не способна распознать нарушителя, либо информация о нарушителе некорректна. Это необходимо для корректной работы заявленного радиолокационного комплекса раннего обнаружения по заданному алгоритму (синхронизации работы отдельных позиций РЛС по времени, запуск отдельных РЛС). Позиции РЛС распределены на местности таким образом, чтобы зоны видимости двух соседних РЛС основного РРК имели перекрытие и были направлены фронтом к прилегающей территории. При этом, в районе точки, являющейся основанием перпендикуляра, проведенного от точки пересечения радиусов, характеризующих максимальные дальности обнаружения двух соседних РЛС, к прямой, соединяющей позиции этих РЛС, находится РЛС дополнительного РРК. СО образуют радиолокационную систему раннего обнаружения, включающую два разведывательно-радиолокационного контура РЛС. РЛС основного РРК осуществляют постоянное радиолокационное наблюдение за прилегающей территорией (охраняемой зоной) в соответствии с установленным графиком наблюдения. Задача РЛС дополнительного РРК - находиться в режиме ожидания сигнала от РЛС основного РРК, либо от ЦПО для перехода в режим обнаружения и распознавания подвижных нарушителей, передачи полученной информации на ЦПО. Также РЛС дополнительного РРК предназначены для дублирования РЛС основного РРК в случае их отключения (при выходе из строя, проведения регламентных работ и в др.).
По сравнению с известными изобретениями, заявленное устройство (комплекс) характеризуется повышенной эффективностью и имеет следующие преимущества:
- обеспечение раннего обнаружения, идентификации и сопровождения нескольких одновременно возникающих нарушителей с разных направлений в широком диапазоне погодных условий (в том числе в метель, туман), когда другие средства обнаружения (в частности оптические и оптико-электронные) не способны эффективно функционировать в данных условиях;
- минимизация количества средств обнаружения за счет создания сплошного информационного радиолокационного поля раннего обнаружения подвижных нарушителей;
- обеспечение дополнительно введенным РРК резервирования средств обнаружения, тем самым повышение надежности работы радиолокационного комплекса раннего обнаружения нарушителей.
Предложенное техническое решение - радиолокационный комплекс раннего обнаружения нарушителей для охраны объекта, содержащее основной и дополнительный РРК РЛС, распределенных по периметру охраняемого объекта, фронтом к прилегающей территории с взаимным перекрытием зон обнаружения, обменивающиеся информацией с ЦОИ, на котором осуществляется совместная обработка сигналов поступающих от каждой РЛС позволяющими обеспечить раннее обнаружение, идентификация и сопровождение нескольких одновременно возникающих нарушителей с разных направлений в широком диапазоне погодных условий (в том числе в метель, туман) является новым для конструкторского решения устройства, и, следовательно, соответствует критерию «новизна».
Вышеприведенная совокупность отличительных признаков заявленного устройства не известна на данном уровне развития техники и не следует из общеизвестных правил известных технологий (способов) охранной сигнализации, в том числе систем охраны объектов и их периметра, что доказывает соответствию критерию «изобретательский уровень».
Конструктивная реализация заявленного изобретения с указанной совокупностью признаков не представляет никаких конструктивно-технических и технологических трудностей, откуда следует соответствие критерию «промышленная применимость».
Источник информации:
1. Патент 2427039, Российская Федерация, G08B 13/19. Мобильный комплекс технических средств охраны. Заявитель и патентообладатель ООО «Научно-производственный комплекс «Дедал». - №2010123351/08; заявл. 09.06.2010; опубл. 20.08.2011, бюл. №23.
2. Патент 2595532, Российская Федерация, G08B 25/00, G08B 19/00, G01S 3/72. Радиолокационная система охраны объекта с малокадровой системой видеонаблюдения и оптимальной численностью сил охраны Заявитель и патентообладатель ФГУП ФНПЦ «ПО «Старт» им. М.В. Проценко». - №2015108506/08; заявл. 11.03.2015, опубл. 27.08.2016, бюл. №24.
3. Черняк B.C. Многопозиционная радиолокация. - М.: Радио и связь. - 1993. - 416 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ОХРАНЫ ТЕРРИТОРИЙ С МАЛОКАДРОВОЙ СИСТЕМОЙ ВИДЕОНАБЛЮДЕНИЯ И ОПТИМАЛЬНОЙ ЧИСЛЕННОСТЬЮ СИЛ ОХРАНЫ | 2015 |
|
RU2595532C1 |
| Радиолокационно-лучевая система охраны периметров протяженных объектов и контроля за прилегающей территорией | 2019 |
|
RU2724805C1 |
| Комбинированный комплекс физической защиты объектов, территорий и прилегающих акваторий с автоматизацией процессов охраны для сокращения численности людских ресурсов по его обслуживанию | 2021 |
|
RU2792588C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА КОНТРОЛЯ ТЕРРИТОРИЙ И УПРАВЛЕНИЯ СИЛАМИ И СРЕДСТВАМИ ОХРАНЫ | 2013 |
|
RU2583742C2 |
| Радиолокационно-лучевая система охраны периметров протяженных объектов | 2019 |
|
RU2720552C1 |
| Интегрированная система безопасности на основе автоматизированных функциональных систем и подсистем | 2022 |
|
RU2794559C1 |
| СПОСОБ ОХРАНЫ ОБЪЕКТОВ ОТ ПРОНИКНОВЕНИЯ ДИСТАНЦИОННО УПРАВЛЯЕМЫХ МАЛОРАЗМЕРНЫХ МАЛОВЫСОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ (ТИПА БПЛА) | 2019 |
|
RU2744497C2 |
| Автономный мобильный комплекс видео-тепловизионного наблюдения | 2018 |
|
RU2671155C1 |
| Малообслуживаемая система физической защиты объектов | 2018 |
|
RU2708509C1 |
| ОПОРНО-ПОВОРОТНОЕ УСТРОЙСТВО | 2015 |
|
RU2581345C1 |
Изобретение относится к области охранной сигнализации, а именно к системам охраны объектов и их периметра, а также к информационным мониторинговым системам и может быть использован для всесуточного и всепогодного обнаружения подвижных нарушителей. Технический результат состоит в повышении достоверности данных мониторинга системы охраны объекта в различных погодных условиях. Комплекс содержит основной и дополнительный разведывательно-радиолокационные контуры (РРК) из радиолокационных станций (РЛС), расположенных по периметру охраняемого объекта охарактеризованным образом, обеспечивающим перекрытие контролируемой территории. Каждая РЛС состоит из устройства обнаружения, устройства распознавания, устройства памяти с библиотекой нарушителей, управляемого адресуемого поворотного устройства, адресуемого буфера, соединенного с устройством памяти с библиотекой нарушителей, а также с коммутатором центрального пульта охраны (ЦПО), который содержит автоматизированные рабочие места (АРМ) операторов, коммутатор. В каждой РЛС устройство обнаружения соединено с устройством распознавания, которое, в свою очередь, соединено с устройством памяти с библиотекой нарушителей. Обеспечены соответствующие линии связи между РЛС и ЦПО. 2 ил.
Радиолокационный комплекс раннего обнаружения нарушителей для охраны объекта, содержащий основной разведывательно-радиолокационный контур из радиолокационных станций, расположенных по периметру охраняемого объекта, каждая из которых состоит из устройства обнаружения, устройства распознавания, устройства памяти с библиотекой нарушителей и управляемого адресуемого поворотного устройства, при этом в каждой радиолокационной станции устройство обнаружения соединено с устройством распознавания, которое, в свою очередь, соединено с устройством памяти с библиотекой нарушителей, в состав каждой радиолокационной станции включен адресуемый буфер, соединенный с устройством памяти с библиотекой нарушителей, а также с коммутатором центрального пульта охраны, который содержит автоматизированные рабочие места операторов, коммутатор, между собой радиолокационные станции и центральный пульт охраны соединены линиями связи, отличающийся тем, что в него введен дополнительный, аналогичный основному разведывательно-радиолокационный контур радиолокационных станций, распределенных по периметру охраняемого объекта, фронтом к прилегающей территории, при этом зоны видимости двух соседних радиолокационных станций обоих разведывательно-радиолокационных контуров радиолокационных станций имеют взаимное перекрытие, так что в районе точки, являющейся основанием перпендикуляра, проведенного от точки пересечения радиусов, характеризующих максимальные дальности обнаружения двух соседних радиолокационных станций, к прямой, соединяющей их позиции, находится радиолокационная станция дополнительного разведывательно-радиолокационного контура, в каждой радиолокационной станции адресный буфер соединен с устройством обнаружения для обмена сигналами управления между радиолокационной станцией и центральным пультом охраны, соединен отдельным каналом с устройством распознавания, в центральный пульт охраны введен центр обработки информации, радиолокационные станции основного и дополнительного разведывательно-радиолокационных контуров радиолокационных станций соединены между собой отдельными линиями связи, по которым осуществлен обмен сигналами управления между ними и центральным пультом охраны, а также по этим отдельным линиям связи осуществлена передача информации об обнаруженных нарушителях с каждой радиолокационной станции в центр обработки информации для совместной обработки, обмен информационными сигналами и сигналами управления между двумя разведывательно-радиолокационными контурами осуществляется через коммутатор центрального пульта охраны.
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ОХРАНЫ ТЕРРИТОРИЙ С МАЛОКАДРОВОЙ СИСТЕМОЙ ВИДЕОНАБЛЮДЕНИЯ И ОПТИМАЛЬНОЙ ЧИСЛЕННОСТЬЮ СИЛ ОХРАНЫ | 2015 |
|
RU2595532C1 |
| СПОСОБ ПРОИЗВОДСТВА СЫРА ТИПА «СУЛУГУНИ» | 0 |
|
SU247039A1 |
| Ручной подборщик клубней | 1959 |
|
SU130729A1 |
| US 6504478 B1, 07.01.2003 | |||
| US 8674831 B1, 18.03.2014 | |||
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| US 6985172 B1, 10.01.2006. | |||

