Настоящее изобретение относится к системе двигателя, двигателю и к содержащему их устройству робототехнического манипулятора. Более конкретно, настоящее изобретение связано с двигателями, предлагающими высокую точность во время линейного движения, и которые, кроме того, пригодны для использования в медицинской среде.
Для линейного движения были разработаны несколько типов двигателей. Например, линейные двигатели используются для точного расположения подложек в полупроводниковой отрасли. Другим примером являются зубчатая рейка и шестерня. Шестерня является круглой и снабжена зубьями на ее наружной поверхности. Эти зубья входят в зацепление с другими зубьями, которые располагаются на линейной штанге, то есть зубчатой рейке. Таким образом, вращательное движение шестерни преобразуются в линейное движение зубчатой рейки.
Особенно интересным применением двигателя и устройства робототехнического манипулятора является область получения медицинских изображений с использованием магнитно-резонансной томографии (МРТ).
Как следствие прогрессирующего старения населения, существует нарастающее количество новых случаев рака. Если рак обнаруживается на ранней стадии, шанс выздоровления повышается. Новые диагностические способы позволяют обнаруживать рак на очень ранней стадии.
Часто встречающейся формой рака является рак простаты. Способ раннего обнаружения использует МРТ простаты с повышенной контрастностью. Таким образом, обнаруживаются отклонения в простате, которые могут указывать на рак. Для точного диагноза и, таким образом, начала лечения, необходима, однако проба ткани на биопсию. Проблема повышения качества диагностики при МРТ-исследованиях состоит в том, чтобы обнаруживать патологические изменения, которые настолько малы, что не обнаруживаются при просмотре традиционными способами биопсии. Это приводит к тому, что биопсия требует неоднократных повторений или, еще хуже, приводит к заключению об отсутствии рака, тогда как патологическое изменение было просто пропущено иглой для биопсии.
По этой причине существует необходимость иметь возможность брать пробы биопсии точным, поддающимся проверке, простым и быстрым способом на основе получения МРТ-изображения. Могло бы быть оптимальным, если бы игла для биопсии могла совершать манипуляции под надзором МРТ, когда деформация простаты за счет манипулирования иглой могла бы компенсироваться во время процедуры. Только когда игла видна в месте патологического изменения и таким образом демонстрируется, что проба биопсии была взята из подозрительного места, может быть принято точное решение в отношении того, имеет ли место рак. Существующие способы, основанные на МРТ, проверяются посредством МРТ вместо того, чтобы действовать под управлением МРТ и, таким образом, требуют много времени. Врач должен войти в пространство МРТ, удалить пациента из области МРТ, осуществить действие иглой, после чего пациент должен быть перемещен обратно в область МРТ. Врач покидает пространство и делается проверочное МРТ. Этот процесс повторяется, пока игла не достигнет требуемого местоположения.
Следовательно, существует потребность в двигателях, чтобы обеспечить точное позиционирование, в частности, для медицинских устройств.
Другая необходимость возникает в результате того факта, что эти двигатели должны быть стерильными.
Кроме того, необходимо, чтобы эти устройства были пригодны для работы в среде МРТ.
Задача изобретения состоит в удовлетворении по меньшей мере одной из упомянутых выше потребностей.
В соответствии с настоящим изобретением, эта задача решается системой двигателя, содержащей двигатель, имеющий элемент зубчатой рейки, снабженный некоторой структурой на его поверхности, причем упомянутая структура имеет периодическую конструкцию зубчатого элемента по меньшей мере в одном направлении. Одномерным примером элемента зубчатой рейки является упомянутая выше зубчатая рейка, в которой структура поверхности содержит периодически расположенные зубья. Однако возможны также двух- или более мерные конструкции, например, в форме металлической плоскости, снабженной ячеистой структурой в виде углублений на ее поверхности. Такая поверхность характеризуется более чем одной размерностью, в которой может быть идентифицирована периодическая конструкция зубчатого элемента, в этом случае являющаяся одиночной ячейкой ячеистой структуры.
Двигатель, соответствующий изобретению, дополнительно содержит зубчатый элемент, в котором размещен набор из множества исполнительных элементов, установленных для одного из направлений для по меньшей мере одного направления, причем каждый из упомянутых исполнительных элементов содержит зацепляющий элемент, имеющий форму, пригодную для зацепления с упомянутым элементом зацепления, и приводной блок для приведения в действие упомянутого зацепляющего элемента, чтобы перемещать его вперед-назад относительно упомянутой периодической структуры.
В соответствии с изобретением, набор исполнительных элементов используется для одного из направлений, вдоль которого может быть определена периодическая конструкция. Для различных направлений может использоваться множество наборов.
Зацепляющий элемент имеет форму, пригодную для зацепления с элементом зацепления. Предпочтительно зацепляющий элемент имеет наружную поверхность для контакта с элементом зацепления, который выглядит по меньшей мере как часть формы, комплиментарной к самому элементу зацепления. В случае известной зубчатой рейки и шестерни, зуб шестерни образует зацепляющий элемент, тогда как круговая структура и блок привода для вращения круговой структуры могут рассматриваться как содержащие приводной блок.
В соответствии с изобретением, зацепляющий элемент входит в зацепление с упомянутым элементом зацепления по меньшей мере во время части перемещения в направлении элемента зацепления, чтобы вызвать относительное перемещение между упомянутым элементом зубчатой рейки и упомянутым зубчатым элементом в упомянутом одном направлении из упомянутого по меньшей мере одного направления. Следовательно, зацепление между элементом зацепления и зацепляющим элементом вызывает относительное перемещение между зубчатым элементом и элементом зацепления, что означает, что один из этих элементов является неподвижным или что оба они не являются неподвижными.
В общем, зацепляющий элемент входит в зацепление с элементом зубчатой рейки с конкретного направления, не являющегося направлением результирующего относительного движения. Для зубчатой рейки и шестерни сила, требующаяся для линейного перемещения, создается непосредственно вращательным движением шестерни. В настоящем изобретении движущая сила является результатом формы зацепляющего элемента и элемента зацепления в сочетании с силой, действующей в направлении зацепления.
В настоящем изобретении каждый из упомянутых исполнительных элементов размещен на некотором расстоянии относительно другого, чтобы зацепляться с упомянутой периодической структуре в различной ее приведенной фазе. Здесь различную фазу следует понимать как зацепление с периодической структурой в различных положениях вдоль направления периодической конструкции.
Система двигателя, соответствующая изобретению, дополнительно содержит блок управления для периодического управления каждым приводным блоком для каждого исполнительного элемента в наборе исполнительных элементов, чтобы они работали со смещением по времени относительно друг друга. В результате каждый из исполнительных элементов в заданном наборе движется периодически отдельно от других. Кроме того, движение заданного исполнительного элемента является смещенным по времени относительно другого исполнительного элемента в том же самом наборе, что означает, что исполнительные элементы являются несинфазными. Например, будут моменты времени, когда один из исполнительных элементов движется в направлении периодической структуры, тогда как другой исполнительный элемент движется в обратном направлении. Предпочтительно исполнительные элементы должны приводиться в действие с одним и тем же периодом.
В соответствии с настоящим изобретением, периодическое управление каждым приводным блоком позволяет осуществлять непрерывное относительное перемещение в упомянутом одном направлении для упомянутого по меньшей мере одного направления во время множества периодов управления. Здесь непрерывное перемещение относится к ситуации, когда перемещение всегда производится в заданном направлении, а не в противоположном направлении.
В отличие от упомянутых выше зубчатой рейки и шестерни, двигатель, соответствующий изобретению, содержит множество исполнительных элементов, каждый из которых имеет зацепляющий элемент и приводной блок, причем приводные блоки могут управляться индивидуально.
Относительное перемещение между элементом зубчатой рейки и зубчатым элементом для одиночного действия одиночного исполнительного элемента определяется формой элемента зацепления и формой зацепляющего элемента. Поэтому становится возможным обеспечение высокой точности при линейном движении. Например, относительно крутой профиль может использоваться в сочетании с относительно большим количеством исполнительных элементов. Относительно малое перемещение, достигаемое одиночным исполнительным элементом, затем компенсируется большим количеством исполнительных элементов в одном наборе. Если подобная точность должна быть достигнута с помощью зубчатой рейки и шестерни, размер шестерни и/или размер зубьев должны уменьшаться, приводя в результате к менее устойчивой системе за счет уменьшенной площади зацепления между зубчатой рейкой и шестерней.
Предпочтительно упомянутый элемент зацепления, количество исполнительных элементов в наборе исполнительных элементов, упомянутый блок управления и упомянутое расположение исполнительных элементов конфигурированы таким образом, что относительное перемещение между зубчатым элементом и элементом зубчатой рейки равно или превышает длину элемента зацепления в упомянутом одном направлении из по меньшей мере одного упомянутого направления после того, как блок управления осуществил управление каждым из упомянутых исполнительных элементов в течение одного периода упомянутого периодического управления. Предпочтительно, каждый зацепляющий элемент приводится в действие, используя один и тот же период времени. Дополнительно, каждый зацепляющий элемент предпочтительно подразумевает идентичное относительное перемещение между элементом зубчатой рейки и зубчатым элементом.
В соответствии с изобретением, сумма индивидуальных перемещений в результате действия различных исполнительных элементов, превышает длину элемента зацепления в направлении движения. По этой причине каждый зацепляющий элемент может перемещаться обратно и повторять свое действие, позволяя таким образом получить непрерывное относительное перемещение.
Предпочтительно, набор исполнительных элементов размещен с промежутками относительно друг друга вдоль упомянутого одного направления из упомянутого по меньшей мере одного направления. Располагая исполнительные элементы в направлении движения, можно избежать механических сил, не имеющих значения для интересующего перемещения, таким образом избегая износа и трения внутри самого двигателя.
Расположение элемента зацепления предпочтительно является периодическим по меньшей мере в двух измерениях, в которых исполнительный элемент дополнительно содержит набор исполнительных элементов для каждого из упомянутых по меньшей мере двух измерений. В этом варианте осуществления элемент зубчатой рейки может рассматриваться как многомерное расширение известной зубчатой рейки. В двигателе размещены по меньшей мере два набора, каждый для различного направления периодичности. Не каждое возможное направление периодичности должно направляться набором исполнительных элементов. Все же использование двух наборов для двух различных направлений позволяет осуществлять относительное перемещение в двух различных направлениях. Кроме того, поскольку в этих направлениях периодичность обычно различается, скорость, связанная с относительным перемещением в этих направлениях, соответственно различается.
Специалисту в данной области техники должно быть понятно, что перемещение в любом требуемом направлении может быть обеспечено, используя соответствующее расположение элементов зацепления и соответствующее расположение зацепляющих элементов. Фактически, любое направление, в котором расположение является периодическим, может использоваться для этой цели. Дополнительно, тот факт, что расположение является периодическим, не обязательно влечет за собой то, что зацепляющие элементы размещены таким образом, чтобы входить в зацепление с соседними элементами зацепления. Кроме того, общее количество зацепляющих элементов зависит от формы элемента зацепления и формы зацепляющего элемента. Вместе они определяют смещение элемента зубчатой рейки за счет взаимного зацепления. Объединенное смещение за счет всех зацепляющих элементов должно быть достаточным для перемещения элемента зубчатой рейки по всей длине элемента зацепления.
С этой целью, предпочтительно, чтобы блок управления был выполнен с возможностью переключения с управления исполнительными элементами, принадлежащими одному набору, на управление исполнительными элементами, принадлежащими другому набору. Таким образом, могут быть последовательно обеспечены раздельные перемещения.
Помимо расположения элемента зацепления на плоской поверхности элемента зубчатой рейки или на его изогнутой поверхности, сам элемент зубчатой рейки может также содержать корпус, имеющий элемент зацепления, периодически расположенный вокруг него, предпочтительно полностью. В таком двигателе относительное перемещение может побуждать элемент зубчатой рейки и зубчатый элемент вращаться и/или совершать поступательные движения относительно друг друга. Когда элементы зацепления расположены по окружности вокруг элемента зубчатой рейки таким образом, что образуется непрерывная поверхностная структура, вращение может быть полным, так что после полного зацепляющие элементы располагаются в одной и той же приведенной фазе. В зависимости от расположения зацепляющих элементов относительно элемента зубчатой рейки и периодического расположения элементов зацепления, это вращение может сопровождаться осевым перемещением. Следовательно, в зависимости от расположения зацепляющих элементов и расположения элементов зацепления, элемент зубчатой рейки может вращаться или поступательно перемещаться или одновременно вращаться и поступательно перемещаться. Выбор другого расположения зацепляющих элементов обеспечивает возможность перемещения в других направлениях.
Наиболее подходящей формой зубчатой рейки является, по существу, цилиндрическая форма, в которой периодическое расположение осуществляется по окружающей поверхности упомянутого цилиндра, то есть по поверхности, проходящей параллельно оси цилиндра. Здесь зубчатый элемент содержит корпус, снабженный круглым отверстием, пригодным для вмещения по меньшей мере части упомянутого элемента зубчатой рейки, и набор исполнительных элементов размещен в радиальном направлении относительно упомянутого элемента зубчатой рейки. Также здесь элемент зубчатой рейки или зубчатый элемент может быть неподвижным при креплении его к несущей раме.
В упомянутом выше варианте осуществления настоящего изобретения, содержащем цилиндрический вариант осуществления элемента зубчатой рейки, круглое отверстие может быть выполнено как сквозное круглое отверстие в упомянутом корпусе. Это позволяет получить большой динамический диапазон перемещения. Например, если зубчатый элемент является неподвижным, элемент зубчатой рейки может перемещаться, по существу, на всю ее длину. Ограничители перемещения могут быть расположены на элементе зубчатой рейки и/или на зубчатом элементе, чтобы препятствовать выходу из зацепления элемента зубчатой рейки и зубчатого элемента.
Дополнительно или в качестве альтернативы, элемент зацепления распределяется по спиральной траектории вокруг упомянутой цилиндрической формы. В этой ситуации направление перемещения является вектором, касательным к спиральной траектории. Если считать, что исполнительные элементы располагаются в направлении относительного перемещения, то тогда подразумевается, что они расположены в схожих радиальных положениях, но в различных осевых положениях и положениях по окружности, причем последние положения соответствуют соответствующим тангенциальным векторам.
Чтобы улучшить стабильность двигателя, элемент зубчатой рейки и зубчатый элемент могут быть фиксированы относительно друг друга в направлении, перпендикулярном структуре поверхности. Например, для варианта осуществления с цилиндрической зубчатой рейкой радиальное расстояние между элементом зубчатой рейки и зубчатым элементом фиксируется, поскольку радиальное направление перпендикулярно структуре поверхности. Для крепления одного из зубчатого элемента или элемента зубчатой рейки может быть использована несущая рама, тогда как другой элемент может свободно перемещаться в одном направлении по меньшей мере для одного направления.
Предпочтительно, двигатель дополнительно содержит элемент направляющей, расположенный в элементе зубчатой рейки и/или зубчатом элементе для направления в нем другого из элемента зубчатой рейки и/или зубчатого элемента. Для варианта осуществления с цилиндрической формой такая направляющая образована круглым отверстием или сквозным отверстием, поскольку оно направляет зубчатый элемент вдоль его оси.
Чтобы избежать какого-либо зазора в двигателе, предпочтительно, чтобы блок управления был выполнен с возможностью управления приводными блоками внутри набора исполнительных элементов таким образом, чтобы по меньшей мере один приводимый в действие зацепляющий элемент входил в зацепление со структурой поверхности в каждый момент времени во время работы двигателя. Таким образом, всегда существует прямое зацепление между зацепляющим элементом и элементом зацепления. Внезапные внешние толчки, воздействующие на одну из частей, не являющуюся неподвижной, например элемент цилиндрической зубчатой рейки, не обязательно приводят к смещению элемента зубчатой рейки, поскольку внешнему толчку противостоит непрерывное зацепление между зацепляющим элементом и элементом зацепления.
Дополнительно или в качестве альтернативы, приводной блок каждого исполнительного элемента выполнен с возможностью работы в состоянии приведения в действие для приведения в действие зацепляющего элемента, чтобы тот перемещался в направлении упомянутого элемента зубчатой рейки, и в освобожденном состоянии - для перемещения упомянутого зацепляющего элемента от элемента зубчатой рейки, причем упомянутый приводной блок содержит упругий элемент, выполненный с возможностью функционировать по меньшей мере в упомянутом освобожденном состоянии и выполненный с возможностью побуждения зацепляющего элемента перемещаться от элемента зубчатой рейки и/или приводной блок выполнен с возможностью позволять зацепляющему элементу перемещаться от элемента зубчатой рейки в освобожденное состояние, по существу, без приложения силы к зацепляющему элементу. Следовательно, либо зацепляющий элемент активно оттягивается из положения, в котором он находится в зацеплении с элементом зубчатой рейки, либо ему позволяют перемещаться назад, по существу, без приложения противодействующей силы. Последнее позволяет перемещающемуся элементу зубчатой рейки выталкивать зацепляющий элемент в освобожденное состояние. В любом случае следует избегать сопротивления, с которым сталкивается элемент зубчатой рейки, оказываемого исполнительными элементами, перемещающимися от периодической структуры.
Предпочтительно иметь блок управления, выполненный с возможностью последовательного управления исполнительными элементами набора.
Элемент зацепления предпочтительно симметричен с точки зрения упомянутых исполнительных элементов, и блок управления предпочтительно дополнительно способен управлять упомянутыми исполнительными элементами упомянутого набора, чтобы вызывать относительное перемещение между элементом зубчатой рейки и зубчатым элементом в направлении, противоположном упомянутому одному направлению из упомянутого по меньшей мере одного направления.
При наличии симметричного элемента зацепления, то есть когда встречается одна и та же структура, перемещающаяся в определенном направлении и в направлении, противоположном ему, относительное перемещение может быть обеспечено в двух противоположных направлениях, например, слева направо и справа налево. Блок управления определяет, какое направление используется, адаптируя схему управления для отдельных исполнительных элементов.
В контексте настоящего изобретения, одно направление и другое направление, противоположное первому направлению, должны рассматриваться как различные направления, с каждым из которых может быть соотнесен свой набор исполнительных элементов. Однако при наличии симметричного элемента зацепления возможно использование одного и того же набора для обоих направлений.
Предпочтительно элемент зацепления содержит коническую полость в поверхности упомянутого элемента зубчатой рейки, и зацепляющий элемент имеет соответствующий конический выступ. Коническая или другая форма, имеющая вращательную симметрию в направлении, перпендикулярном структуре поверхности, обеспечивает самоцентрующееся зацепление между зацепляющим элементом и элементом зацепления. Это уменьшает износ системы и повышает требуемую точность расположения исполнительных элементов.
В варианте осуществления набор исполнительных элементов для заданного направления периодичности содержит по меньшей мере n исполнительных элементов, причем n больше или равно двум, и при этом соответствующие исполнительные элементы располагаются так, чтобы входить в зацепление со структурой поверхности в приведенной фазе, приблизительно равной m × 360/n, где m = 1…n, соответственно. Здесь приведенная фаза относится к фазе определенного положения периодической структуры, скорректированной с учетом содержащихся в ней целого количества периодов. Например, абсолютная фаза 480 градусов может в результате привести к приведенной фазе 480-360=120 градусов.
Важно из направления зацепления вычислить периодичность. Если зацепляющие элементы входят в зацепление с периодической структурой, например, под углом, то возможно, если смотреть с точки зрения зацепляющих элементов, чтобы соответствующая длина зубчатого элемента была другой по сравнению со случаем перпендикулярного зацепления. В этом случае для целей вычисления рекомендуется использовать первую упомянутую длину.
Исполнительные элементы при различных, но равноудаленных приведенных фазах предпочтительно выравниваются относительно различных элементов зацепления. Это предотвращает расположение исполнительных элементов слишком близко друг к другу, где они могут затруднять друг другу перемещение. Дополнительно, исполнительные элементы предпочтительно располагаются так, что зацепляющие элементы входят в зацепление со структурой поверхности перпендикулярно.
Хотя с каждым направлением периодичности соотнесен свой набор, это не исключает возможность того, что по меньшей мере один исполнительный элемент принадлежит двум различным наборам исполнительных элементов. Например, если 5 исполнительных элементов располагаются в крестообразной структуре, исполнительный элемент в середине креста может участвовать в перемещении в обоих направлениях, указанных крестом.
Предпочтительный вариант осуществления приводного блока содержит приводимый в действие цилиндр поршневого типа, причем упомянутый цилиндр имеет цилиндрический корпус и движущийся в нем поршень, причем упомянутый зацепляющий элемент образован и/или размещен на конце упомянутого поршня. Здесь цилиндрический корпус является неподвижным относительно зацепляющего элемента в направлении зацепления.
Приводной блок может содержать другие соответствующие средства для приведения в действие зацепляющего элемента. В дополнение к упомянутому выше цилиндру, например, гидравлическому или пневматическому, могут использоваться электрические двигатели, такие как линейный двигатель.
Такой приводимый в действие цилиндр предпочтительно является нереверсивным. Это означает, что движение поршня в направлении элемента зацепления происходит за счет приведения в действие цилиндра, прикладывая, таким образом, значительную силу к элементу зацепления, тогда как обратное перемещение от элемента зацепления вызывается некоторой упругостью цилиндра или внешним действием по отношению к нему. Например, пружина или другой упругий элемент, такой как давление текучей среды, могут быть расположены внутри корпуса цилиндра, побуждая поршень перемещаться назад, когда он не приводится в действие. Во время перемещения назад от элемента зацепления поршень не оказывает действие или на элемент зацепления не действует никакая сила или действует очень небольшая сила.
Специально для медицинских сред предпочтительно использовать в качестве приводимых в действие цилиндров пневматические цилиндры. Гидравлические цилиндры или другие цилиндры создают риск утечки. Приведение в действие пневматических цилиндров предпочтительно осуществляется с помощью сжатого воздуха, хотя также возможно использовать пониженное давление.
Пневматические цилиндры во время работы предпочтительно действуют в импульсном режиме. Цилиндр здесь будет приводиться в действие на короткое время. Скорость относительного перемещения зубчатого элемента и элемента зубчатой рейки может определяться скоростью, с которой приводятся в действие пневматические цилиндры, и используемым давлением сжатого воздуха.
Чтобы дополнительно сделать двигатель, соответствующий изобретению, пригодным для медицинских сред и сред МРТ, в частности, удобно изготавливать двигатель из непроводящего немагнитного или ненамагничивающегося материала.
В соответствии со вторым вариантом, настоящее изобретение обеспечивает устройство робототехнического манипулятора, содержащего первую часть рамы, которая может быть установлена или размещена на основании устройства ротототехнического манипулятора, и вторую часть рамы, соединенную с первой частью рамы. Здесь двигатель, соответствующий изобретению, используется для изменения ориентации относительно друг друга и/или расстояния между первой и второй частями рамы. С этой целью, зубчатый элемент упомянутого двигателя соединен с одной из упомянутых первой или второй части рамы, а элемент зубчатой рейки соединен с другой из упомянутой первой или второй части рамы. Это соединение не обязательно должно быть непосредственным, а может осуществляться через шарниры или другие промежуточные конструкции.
Первая и/или вторая часть рамы может содержать часть в виде плоской пластины для простого размещения на ней компонентов. Первая часть рамы может быть, например, таким образом прикреплена к кровати, на которой лежит пациент, образуя, таким образом, устойчивую цельную конструкцию.
Двигатели, размещенные между первой и второй частями рамы, образуют конструктивную часть устройства робототехнического манипулятора.
В предпочтительном варианте осуществления элемент зубчатой рейки, например, в форме упомянутого выше цилиндра, соединен со второй частью рамы. Зубчатый элемент при этом соединен с первой частью рамы. Можно установить двигатель и наоборот. В случае, когда между частями рамы размещено множество двигателей, двигатели могут быть установлены отлично друг от друга, обеспечивая сочетание двух описанных выше способов установки.
Устройство робототехнического манипулятора предпочтительно содержит по меньшей мере шесть двигателей в соответствии с изобретением, расположенных таким образом, что они образуют платформу Стюарта. Этот тип платформы обеспечивает шесть степеней свободы перемещения, то есть поступательное движение, поворот и вращение во всех направлениях. Соединение между двигателями на первой и второй частях рамы должно поддерживать эти степени свободы, и соответственно должны быть предусмотрены шарниры.
Чтобы иметь возможность использовать устройство робототехнического манипулятора или непосредственно двигатель в среде МРТ, предпочтительно использовать немагнитные, ненамагничивающиеся и непроводящие материалы, такие как пластмасса, углерод, стекло или керамический материал.
Устройство робототехнического манипулятора может быть дополнительно улучшено, если первая и/или вторая часть рамы обеспечивается сквозным отверстием, чтобы в него входил зубчатый элемент или элемент зубчатой рейки двигателя. Это особенно интересно, если зубчатый элемент или элемент зубчатой рейки сам содержит сквозное отверстие для вхождения в него другого зубчатого элемента или элемента зубчатой рейки. Поскольку зубчатый элемент или элемент зубчатой рейки со сквозным отверстием могут перемещаться через другой элемент, динамический диапазон двигателя таким образом увеличивается. При размещении такого двигателя в сквозном отверстии первой или второй части рамы минимальное расстояние между двумя частями рамы может быть уменьшено, поскольку большая часть двигателя может быть расположена за пределами пространства между первой и второй частями рамы.
Для дополнительного улучшения устройства робототехнического манипулятора оно может содержать шарнир, предпочтительно шаровой шарнир, с предусмотренным в нем сквозным отверстием, через которое упомянутый зубчатый элемент или упомянутый элемент зубчатой рейки неподвижно соединяется с упомянутым шарниром, и в котором шарнир выполнен с возможностью шарнирного соединения упомянутого зубчатого элемента или упомянутого элемента зубчатой рейки с упомянутой первой и/или второй частью рамы. Такая конфигурация не только позволяет уменьшить минимальное расстояние между первой и второй частью, но также обеспечивает возможность вращения двигателя. В случае использования шарового шарнира это вращение возможно по множеству осей.
В соответствии с дополнительным вариантом, изобретение предусматривает описанный выше двигатель. Приводные блоки этого двигателя выполнены с возможностью внешнего управления.
Далее изобретение будет описано более подробно со ссылкой на сопровождающие чертежи, на которых:
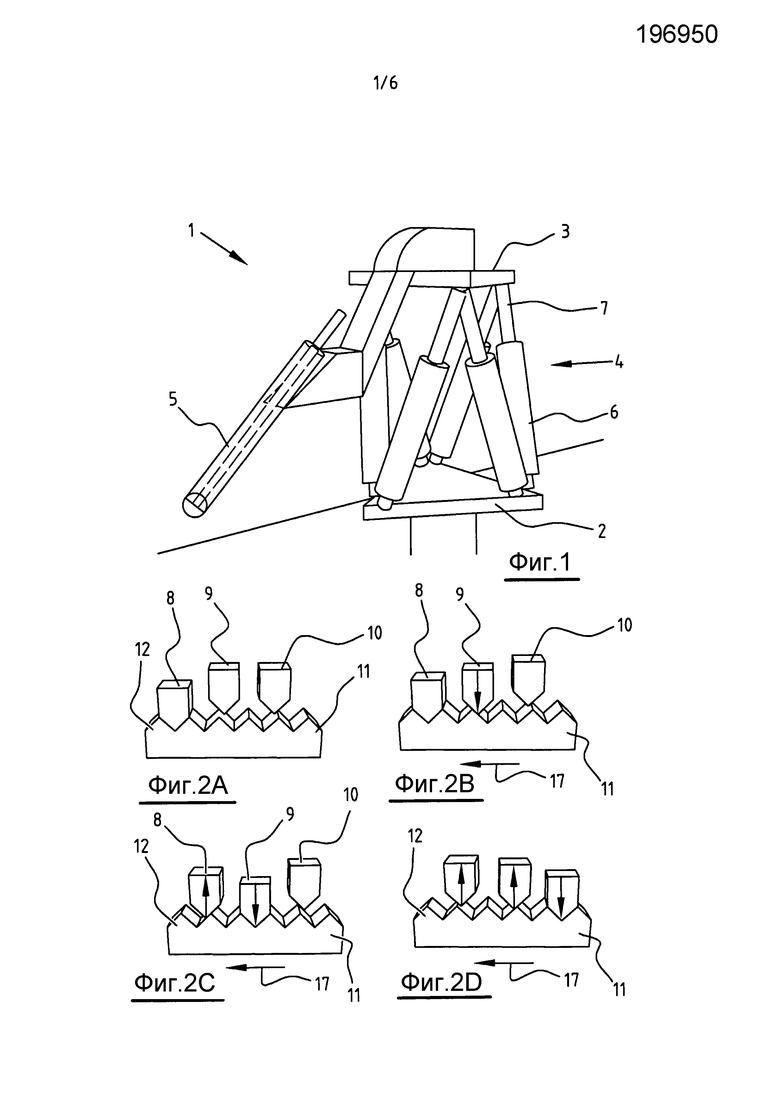
фиг.1 - предпочтительный вариант осуществления устройства робототехнического манипулятора, соответствующего настоящему изобретению;
фиг.2A-2D - принцип двигателя, соответствующего изобретению, с тремя зацепляющими элементами;
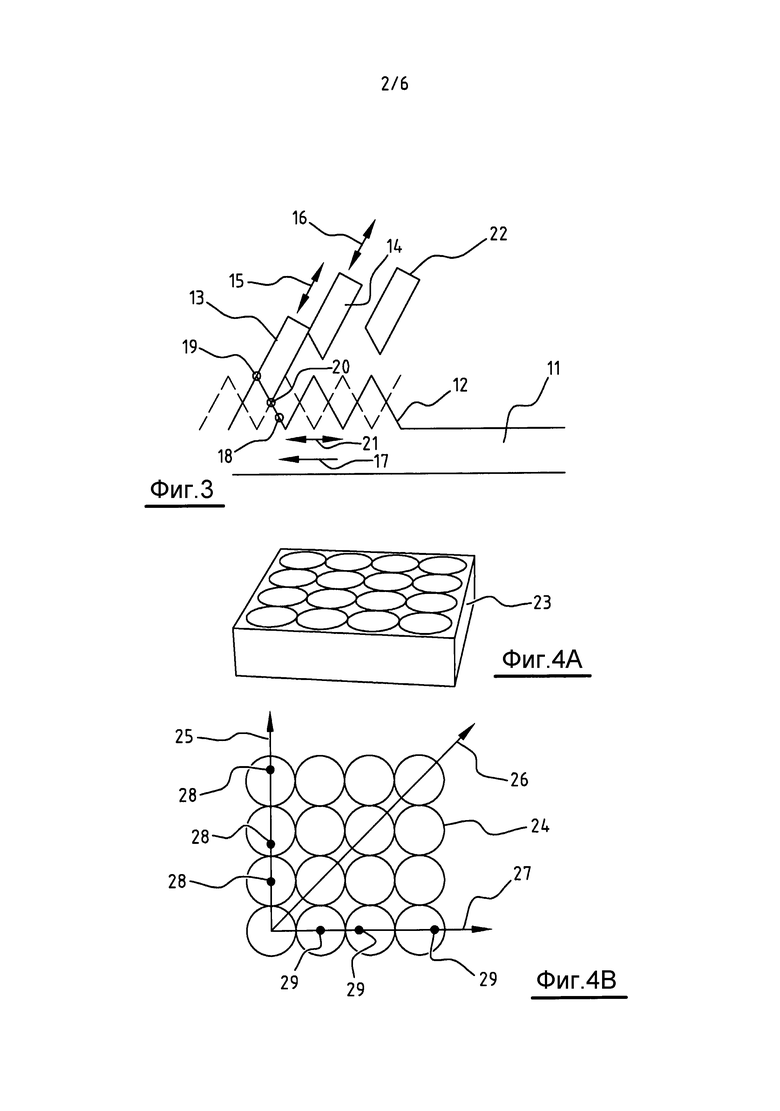
фиг.3 - вариант двигателя, показанного на фиг.2A, с двумя зацепляющими элементами;
фиг.4A-4B - вариант осуществления элемента зубчатой рейки с двумерной периодической структурой;
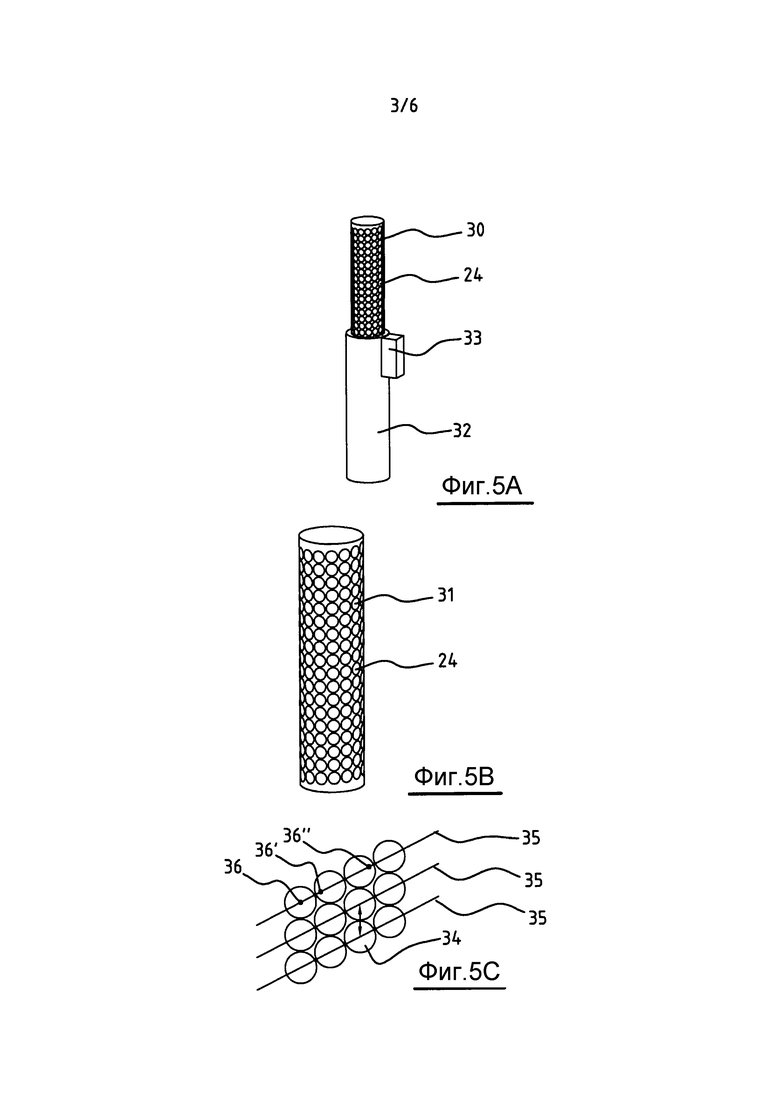
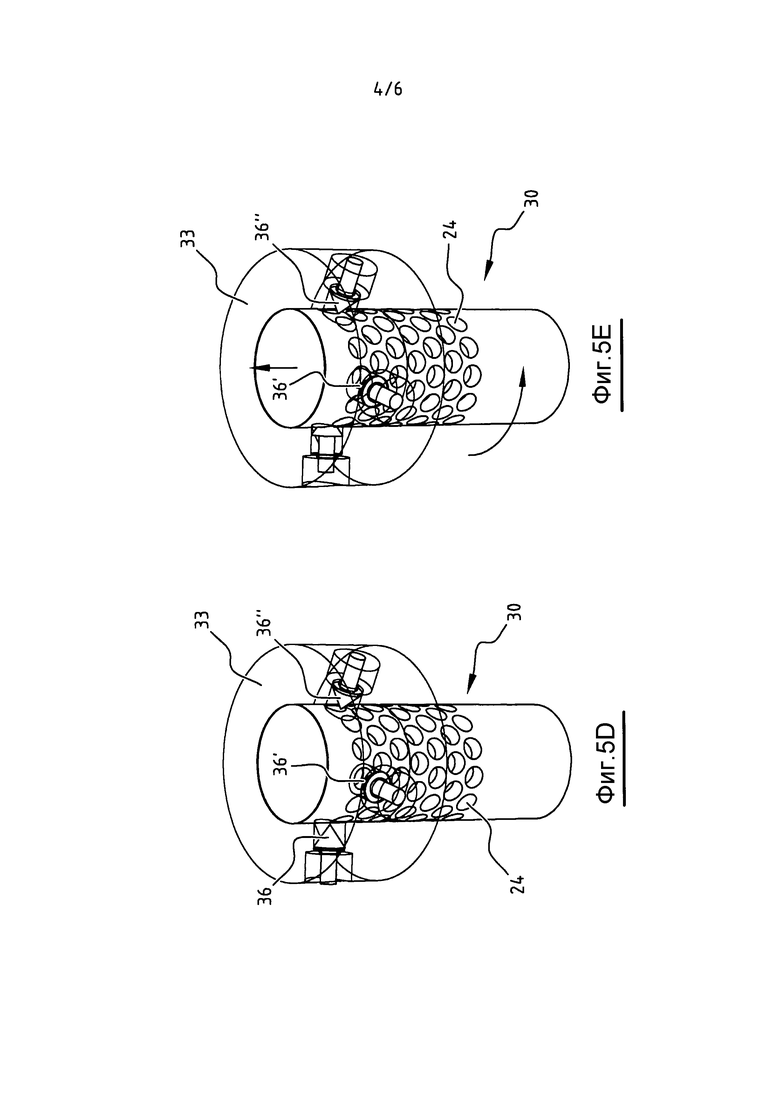
фиг.5A-5G - исполнительный элемент двигателя согласно изобретению;
фиг.6 - вариант устройства робототехнического манипулятора, показанного на фиг.1; и
фиг.7 - применение устройства робототехнического манипулятора, соответствующего настоящему изобретению.
В приведенном ниже описании вариантов осуществления описана работа двигателя, как если зубчатый элемент удерживается неподвижным. Специалисту в данной области техники следует понимать, что также возможно удерживать неподвижным элемент зубчатой рейки.
На фиг.1 представлен вариант осуществления устройства 1 робототехнического манипулятора, соответствующего настоящему изобретению. Устройство 1 робототехнического манипулятора содержит первую часть 2 рамы и вторую часть 3 рамы. Части 2, 3 рамы соединены между собой посредством двигателей 4. Медицинское средство монтируется сверху второй части 3 рамы. На фиг.1 этим медицинским средством является направляющая 5 игла, которая прикрепляется посредством рычага.
Расположение двигателей соответствует принципу платформы Стюарта. Двигатели 4 здесь соединены с частями 2, 3 рамы посредством поворотных соединений (не показаны), например, шарнирных (и муфтовых) соединений. Двигатели 4 содержат зубчатый элемент в форме корпуса 6 двигателя, в который может подвижно входить элемент зубчатой рейки в форме поршня 7.
Сочетание корпуса 6 двигателя и поршня 7 действует как телескоп и упоминается в дальнейшем как штанга. Высота, параллельное смещение, вращение и поворот устройства робототехнического манипулятора определяются путем изменения длины различных штанг.
На фиг.2А-2D схематично представлен предпочтительный вариант осуществления двигателя, соответствующего изобретению. Три цилиндра поршневого типа размещены в зубчатом элементе. Эти цилиндры содержат как зацепляющий элемент в форме зубьев 8, 9, 10, так и приводной блок (не показан) или его часть. Цилиндры предпочтительно являются пневматическими цилиндрами. Зубья 8, 9, 10 имеют форму, подобную зубьям зубчатого колеса. Эти три зуба смещены по фазе на 120 градусов относительно периодической структуры на элементе 11 зубчатой рейки. Эта периодическая структура содержит ряд элементов зацепления в форме треугольных зубьев 12. Как можно видеть на чертеже, различные зубья располагаются с разными приведенными фазами периодической структуры. На фиг.2A, принимая вершину каждого треугольника 12 за 0 градусов, зуб 8 имеет приведенную фазу 180 градусов, зуб 9 имеет приведенную фазу 60 градусов и зуб 10 - приведенную фазу 300 градусов.
Начнем с ситуации, показанной на фиг.2A, где зуб 9 активирован, зуб 8 деактивирован. Активация зуба означает, что блок запуска приводит зуб в действие для перемещения в направлении элемента зубчатой рейки. Деактивация означает, что зуб убирается. Это может быть выполнено либо за счет результирующей силы со стороны самого приводного блока, например, за счет пружины в пневматическом поршне, приводящем в действие зуб, либо за счет взаимодействия с элементом зубчатой рейки. В последнем случае элемент зубчатой рейки, находящийся в зацеплении с другим зацепляющим элементом, отталкивает деактивированный зацепляющий элемент от элемента зубчатой рейки. В любом случае, важно минимизировать силу, прикладываемую деактивированным зацепляющим элементом к элементу зубчатой рейки.
За счет зацепления зуба 9 элемент 11 зубчатой рейки скользит в сторону. Зуб 8 тем самым активно выталкивается обратно, см. фиг.2B и 2C. Зуб 10 скользит с левой стороны вершины элемента зацепления в правую сторону. Следовательно, когда зуб 9 полностью вошел в элемент 11 зубчатой рейки, зуб 10 находится в правильном положении, чтобы создать зацепление с элементом 11 зубчатой рейки.
Следовательно, если зубья приводятся в действие поочередно или последовательно, возможно ступенчатое перемещение элемента 11 зубчатой рейки. Это возможно при любой желаемой скорости, изменяя ритм зубьев. Если ни один из зубьев не активирован, элемент 11 зубчатой рейки может свободно перемещаться относительно зубьев 8, 9, 10. Если по меньшей мере один зуб непрерывно активируется, элемент 11 зубчатой рейки блокируется. Преимуществом непрерывного активирования по меньшей мере одного зуба или зацепляющего элемента в общем является уменьшенный допуск двигателя, который может быть обеспечен. Благодаря непрерывному зацеплению, двигатель менее чувствителен к силам, прикладываемым к элементу зубчатой рейки.
На фиг.3 представлен общий принцип работы двигателя, соответствующего настоящему изобретению, использующего два цилиндра поршневого типа.
На фиг.3 представлен элемент 11 зубчатой рейки, содержащий ряд зубьев 12, размещенных один за другим. Также показаны два зуба 13, 14, которые присоединяются к отдельным цилиндрам поршневого типа, подобные варианту осуществления, показанному на фиг.2A (не показаны). Перемещение этих зубьев возможно вдоль направления, указанного стрелками 15, 16.
На фиг.3 зуб 13 входит в зацепление с элементом 11 зубчатой рейки и более конкретно с периодической структурой на его поверхности. По мере того, как зуб 13 перемещается дальше вниз, когда соответствующий цилиндр активирован, элемент 11 зубчатой рейки будет перемещаться, как указано стрелкой 17. Тем самым, будет занято положение, показанное пунктирными линиями. Как можно заключить из фиг.3, зуб 14 может в этом случае войти в зацепление с элементом 11 зубчатой рейки. Цилиндр, соответствующий этому зубу, здесь активируется, и цилиндр, соответствующий зубу 13, деактивируется или активно удаляется. В результате, зуб 13 будет перемещаться обратно, например, за счет силы пружины, связанной с пружиной, расположенной в самом цилиндре (однонаправленного действия).
Когда зуб 14 совершает свое направленное наружу перемещение, элемент 11 зубчатой рейки достигает положения, сопоставимого с начальным положением, и процедура может быть повторена. Цилиндр зуба 13 затем активируется снова, в противоположность цилиндру зуба 14, который деактивирован.
Следует заметить, что периодичность зубчатой рейки 11, как видно с направления, перпендикулярного ей, отличается от той, которая видна с направления зацепления зубьев 13, 14, что соответствие стрелкам 15 и 16 соответственно. Длина стороны 18 соответствует зубьям.
Зубья 13, 14 размещены с различными приведенными фазами, как показано на фиг.3. Можно, например, представить, что зуб 13 соответствует положению 19 элемента 11 зубчатой рейки и зуб 14 соответствует положению 20. Эти два положения имеют разность фаз 180 градусов, когда это вычисляется со стороной 18 в качестве соответствующей размерности элемента зацепления. Ясно, что она отличается от вычисления приведенной фазы, начинающейся с длины, указанной стрелкой 21.
В противном случае, следует отметить, что зуб 22, который показан для иллюстрации, имеет ту же самую приведенную фазу, что и зуб 14.
Эта система обеспечивает возможность перемещения в одном направлении. Для перемещения в другом направлении может использоваться вторая система, хотя и в зеркально отраженном положении.
Вариант осуществления, представленный на фиг.4A, показывает двумерную периодическую структуру на элементе 23 зубчатой рейки. Периодическая структура содержит двумерное расположение конических отверстий 24 на поверхности, отличной от плоской. Чтобы гарантировать оптимальное зацепление, элементы зацепления имеют форму, соответствующую форме конических отверстий, то есть конические выступы. Благодаря такому расположению, могут быть идентифицированы несколько направлений, вдоль которых структура является периодической. На фиг.4B в качестве таких примеров показаны несколько направлений 25, 26, 27.
Располагая элементы зацепления соответствующим образом относительно элемента 23 зубчатой рейки, перемещения элемента 23 зубчатой рейки 23 могут быть достигнуты вдоль любого из направлений 25, 26, 27. Например, на фиг.4B посредством точки показано местоположение конца каждого элемента зацепления относительно элемента 23 зубчатой рейки. На фиг.4B показаны два набора исполнительных элементов. Первый набор, содержащий исполнительные элементы, концы элементов зацепления которых указаны точками 28, и второй набор, содержащий исполнительные элементы, концы элементов зацепления которых указаны точками 29. Первый набор используется для перемещения элемента зубчатой рейки вдоль направления 25, тогда как второй набор используется для перемещения вдоль направления 27. Если два набора были расположены в крестообразной форме, один из исполнительных элементов может использоваться для обоих перемещений, экономя, таким образом, затраты и место.
Следует заметить, что направления 25, 26, 27 являются не единственными возможными направлениями. Например, может быть определено дополнительное направление, соответствующее одному коническому отверстию в одном направлении и двум коническим отверстиям в направлении, перпендикулярном ему. Это направление, соответствующее перемещению коня при игре в шахматы, также представляет направление, в котором может быть идентифицирована периодичность элемента зацепления. При использовании этого направления зацепляющие элементы располагаются не так, чтобы входить в зацепление с соседними коническими отверстиями. Как описано ранее, длина элемента зацепления зависит от выбранного направления. Например, при упомянутом выше направлении, подобном ходу коня, длина элемента зацепления является квадратным корнем из пятикратного квадрата диаметра конического отверстия. Должно быть размещено достаточное количество зацепляющих элементов таким образом, чтобы гарантировать, что элемент зубчатой рейки может перемещаться по всей длине элемента зацепления. Кроме того, заметим, что расположение зацепляющих элементов не обязательно должно быть таким, как показано на фиг.4B. Например, зацепляющие элементы могут быть распределены так, что они не находятся на линии перемещения и/или что они не располагаются рядом друг с другом. Однако каждый зацепляющий элемент должен иметь заданную разность фаз с элементами зацепления, расположенными под ними, чтобы обеспечить возможность перемещения в заданном направлении.
В вариантах осуществления, показанных на фиг.2, 3 и 4, элемент 11, 23 зубчатой рейки содержит ряд зубьев/отверстий. Перемещение элемента 11, 23 зубчатой рейки для каждого приведения в действие одиночного зацепляющего элемента поэтому определяется, главным образом, боковым размером зуба на элементе зубчатой рейки.
К сожалению, размер такого шага может быть слишком большим для некоторых применений. В частности, при медицинских применениях точное расположение медицинского средства, такого как направляющая игла, является чрезвычайно важным. Для некоторых применений поэтому желательно реализовать замедление.
Замедление может быть реализовано с помощью элемента зубчатой рейки, как показано на фиг.5A и 5B. Цилиндрический элемент 30 зубчатой рейки снабжен коническими отверстиями 24, расположенными по спирали, образуя периодическую структуру. Элемент 30 зубчатой рейки проходит через зубчатый элемент, содержащий корпус 32 двигателя, предпочтительно изготовленный из пластика и реализованный в виде трубчатого элемента. В этом элементе находятся три цилиндра поршневого типа, размещенные в отсеке 33 корпуса 32 двигателя. Цилиндры соединяются с коническими зубьями, которые вставляются в конические отверстия 24 в поверхности элемента 31 зубчатой рейки, подобно варианту осуществления, показанному на фиг.4. Цилиндры располагаются на одной стороне в продольном направлении трубчатого элемента. Это делается для того, чтобы исключить необходимость допуска, позволяющего различным частям перемещаться, так чтобы это не возникало в рычаге.
Перемещение элемента зубчатой рейки в двух направлениях определяется, когда зубья приводятся в движение. Цилиндры располагаются так, что элемент 30 зубчатой рейки в активированном состоянии перемещается не в линейном направлении, а движется по спирали в соответствии со спиральной траекторией конических отверстий 24 вокруг цилиндрического элемента 30 зубчатой рейки. По существу, осевое перемещение, получившееся после полного оборота элемента 30 зубчатой рейки, соответствует расстоянию 34 между центрами конических отверстий 24 в осевом направлении. Варьируя диаметр элемента 30 зубчатой рейки и таким образом количество отверстий, может быть реализовано большое количество различных передач.
Как описано в отношении фиг.4A, расположение конических отверстий и зацепляющих элементов может быть выбрано по-другому, чтобы обеспечить возможность перемещения в различных направлениях. Например, вместо спирального распределения, отверстия могут быть распределены по кругу. Также в этом случае могут быть получены одновременное вращение и поступательное движение, потому что здесь также существует множество направлений периодичности.
На фиг.5C схематично представлены конические отверстия 34, описывающие спираль 35 вокруг элемента 30 зубчатой рейки, в сильно увеличенном виде. Спираль показана на плоской поверхности на фиг.5C. Отдельные исполнительные элементы, в частности их зацепляющие элементы, располагаются таким образом, чтобы войти в зацепление с элементом 30 зубчатой рейки в положении на спирали 35 со взаимным сдвигом фаз на 120 градусов относительно периодической структуры на элементе 30 зубчатой рейки. Точки 36 здесь соответствуют проекции концов зубьев вдоль направления зацепления зубьев на поверхности 31 зубчатой рейки. Заметим здесь, что каждая из этих точек лежит на спирали, связанной с зубом.
Двигатель может дополнительно быть снабжен вторым набором исполнительных элементов, расположенных, например, вдоль осевого направления элемента 30 зубчатой рейки. Используя эти цилиндры, элемент 30 зубчатой рейки может перемещаться в осевом направлении без вращения и более быстро, чем при использовании ранее упомянутого первого набора исполнительных элементов. Следовательно, используя различные наборы, могут быть достигнуты различные перемещения, то есть вращение, поступательное движение и их сочетание.
Следует заметить, что вариант осуществления, показанный на фиг.5, может быть модифицирован таким образом, чтобы элемент 30 зубчатой рейки был расположен в сквозном отверстии корпуса 32 двигателя. Поэтому элемент 30 зубчатой рейки может проходить через корпус 32 двигателя, появляясь на другой стороне. По существу, динамический диапазон элемента 30 зубчатой рейки, то есть диапазон ее осевого перемещения, значительно увеличивается.
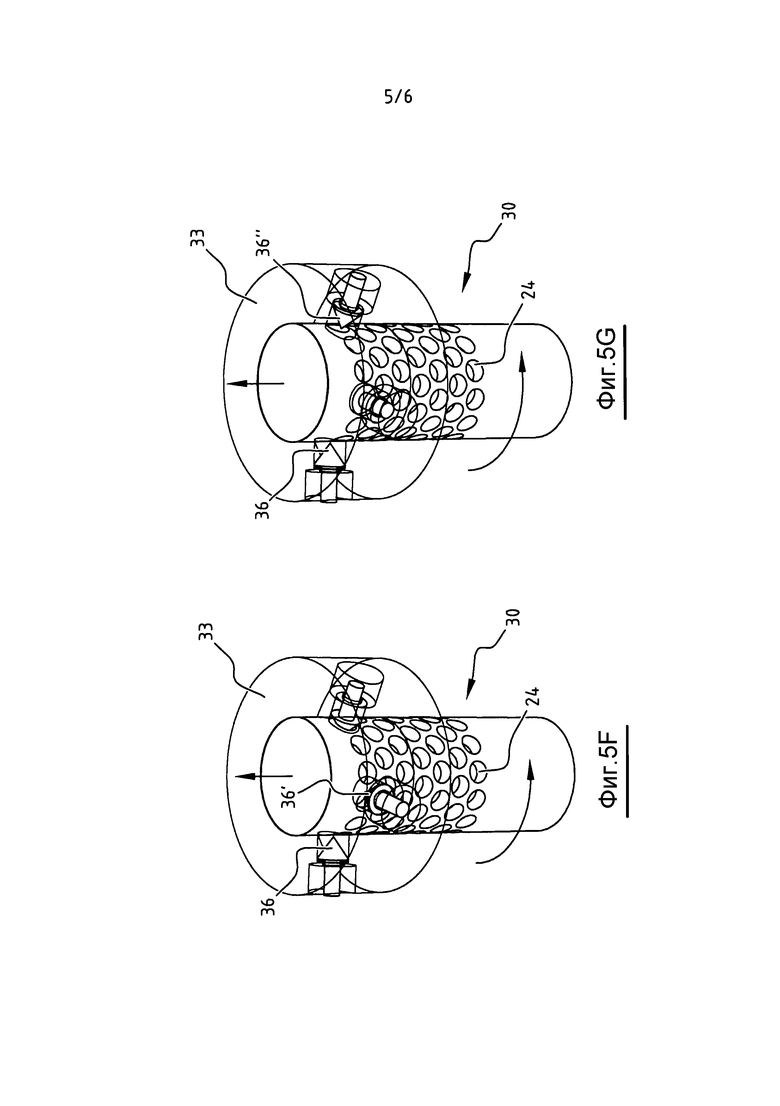
На фиг.5D-5G представлен частично открытый вид в перспективе варианта осуществления, показанного на фиг.5A, на котором различные исполнительные элементы смещены в круговом направлении для лучшей иллюстрации работы устройства.
На фиг.5D ни один из зацепляющих элементов, которые упоминаются как 36-36'', не входит в зацепление с коническим отверстием 24. В таком режиме и при отсутствии блокирующего средства элемент 30 зубчатой рейки может двигаться по оси относительно корпуса 32 двигателя.
На фиг.5E зацепляющий элемент 36, который, подобно другим зацепляющим элементам, соединен со штоком поршня пневматического или гидравлического цилиндра (не показан), выталкивается в коническое отверстие 24. Поскольку это отверстие не полностью совмещено с зацепляющим элементом 36, результирующая сила будет развиваться в круговом и/или осевом направлении, побуждая элемент 30 зубчатой рейки двигаться соответственно, как указано стрелками.
Затем пневматический или гидравлический цилиндр, соответствующий зацепляющему элементу 36, будет деактивирован или этот цилиндр будет активно извлекать зацепляющий элемент 36. В последнем случае блок управления, управляющий различными исполнительными элементами, должен будет иметь возможность реверсировать движение исполнительного элемента гидравлических или пневматических цилиндров. Другими словами, в дополнение к управлению увеличенным ходом необходимо иметь возможность управлять обратным ходом периодическим образом подобно увеличенному ходу и учитывать синхронизацию управления других исполнительных элементов.
После или одновременно с извлечением зацепляющего элемента 36 из соответствующего конического отверстия, зацепляющий элемент 36'' входит в зацепление с коническим отверстием, см. фиг.5F. Это снова вызывает осевое и/или круговое перемещение. То же самое, что было описано выше, повторяется для зацепляющего элемента 36', см. фиг.5G.
Когда зацепляющий элемент 36' полностью вставлен в коническое отверстие, расположенное напротив него, положение зацепляющего элемента 36 относительно конического отверстия, в которое он направляется, является таким же, как описано на фиг.5D. Это позволяет повторить ту же самую последовательность перемещений, получая таким образом общее непрерывное движение.
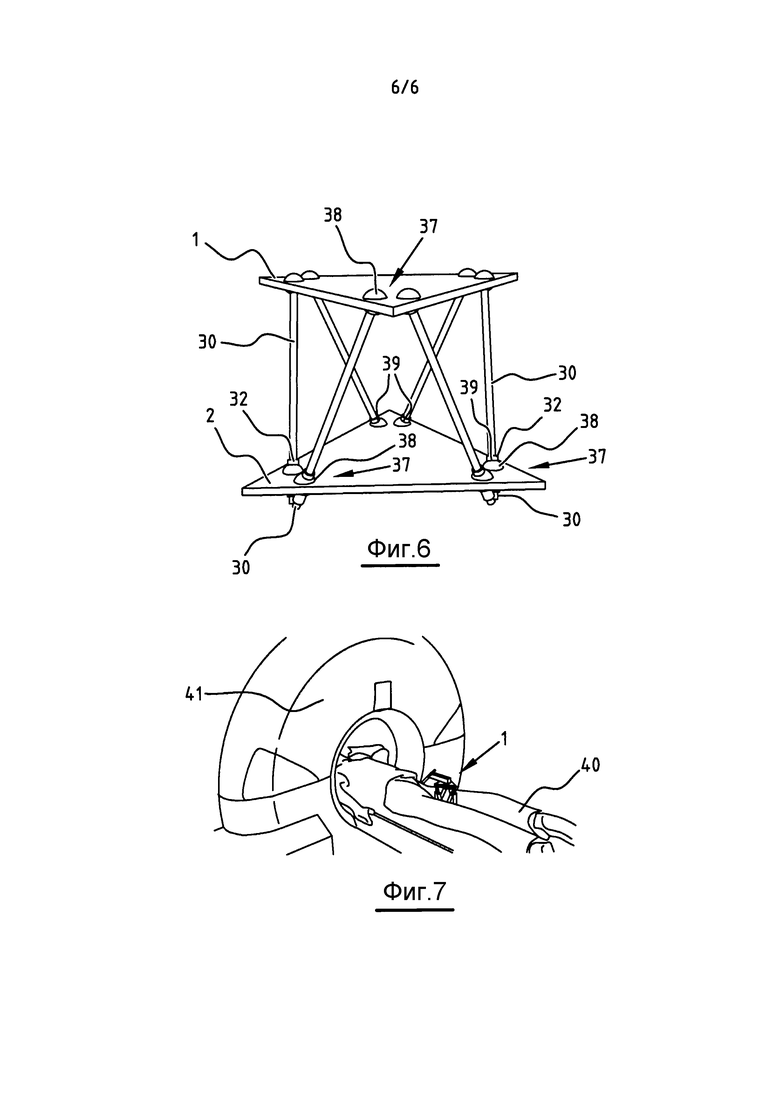
На фиг.6 представлен вариант устройства робототехнического манипулятора, показанного на фиг.1. Здесь первая часть 2 рамы обеспечена отверстиями 37, в которых установлен шаровой шарнир 38. Шаровой шарнир 38 облегчает соединение между зубчатым элементом 32 и первой частью 2 рамы. С этой целью шаровой шарнир 38 сам снабжен сквозным отверстием 39, с которым неподвижно соединен зубчатый элемент 32. В частности, если зубчатый элемент 32 также выполнен со сквозным отверстием, как описано, получается свободноподвижное устройство робототехнического манипулятора. Поскольку штанги, то есть двигатели, между первой 2 и второй 3 частями рамы могут быть сделаны очень малыми, устройство робототехнического манипулятора имеет очень широкий динамический диапазон.
На фиг.7 показано применение устройства робототехнического манипулятора, соответствующего изобретению. В этом случае устройство установлено на кровати вблизи пациента 40. Устройство робототехнического манипулятора и направляющая иглы, помещенная на нем, устанавливаются в исходное положение. Затем записывается изображение МРТ, используя сканер 41 МРТ.
Важно заметить, что вблизи сканера МРТ не могут находиться никакие металлические предметы. Это сужает выбор компонентов и материалов для реализации устройства робототехнического манипулятора. На фиг.7 в качестве исполнительных элементов в двигателях используются пневматические цилиндры, и каждый компонент устройства робототехнического манипулятора выполнен из немагнитного, ненамагничивающегося и непроводящего материала.
Активация пневматических цилиндров осуществляется дистанционно посредством электропневматических клапанов. Когда врач размещает устройство робототехнического манипулятора около пациента и делает приблизительные настройки, желательно с этого места иметь возможность регулировки блокирования и разблокирования устройства робототехнического манипулятора.
Это осуществляется клавишами управления на самом устройстве. Они являются клапанами в форме клавиш, с помощью которых наличие или отсутствие давления прикладывается к каналам, соединенным с клапанами. Давление в каналах определяется дистанционно, то есть вне среды МРТ, где результаты обнаружения используются для подачи сжатого воздуха к пневматическим цилиндрам.
Пневматические цилиндры предпочтительно приводятся в действие посредством сжатого воздуха. Поскольку для каждого цилиндра требуется перемещение приблизительно всего лишь на три миллиметра, потребление воздуха нулевое. Небольшой бесшумный компрессор поэтому достаточен. Каждый цилиндр имеет свой собственный тонкий трубопровод подачи сжатого воздуха, которые объединяются и соединяются с блоком воздушного компрессора. Этот блок содержит компрессор, регуляторы давления, датчики давления, вакуумный насос, электропневматические клапаны и электронику для преобразования компьютерных сигналов в сигналы, пригодные для приведения в действие электропневматических клапанов.
Электропневматические клапаны приводятся в действие блоком воздушного компрессора, чтобы получить желаемое перемещение. Перемещения устройства робототехнического манипулятора, который движется благодаря изменению длины штанг, не является линейным. То есть вытягивание определенной штанги может оказывать различные влияния на положение устройства робототехнического манипулятора в зависимости от положения других штанг. Эта нелинейность, однако, математически прогнозируема и компенсируется программным обеспечением. Расстояние, на которое будет происходить перемещение, может прогнозироваться, используя двигатели, соответствующие настоящему изобретению. Поэтому возможно с помощью устройства робототехнического манипулятора двигаться по заданной траектории. Соединяя МРТ и устройство робототехнического манипулятора, возможно увидеть в пределах определенного участка, когда произошла установка местоположения, и состояние устройства робототехнического манипулятора. Если структура, которая может быть распознана на МРТ (например, направляющая иглы) управляется устройством робототехнического манипулятора и это может быть видно на экране, последовательность двигателей, приведенных в действие блоком воздушного компрессора, может точно определить, где располагается устройство робототехнического манипулятора и какое вытяжение или рычаг используются.
После ручного манипулирования устройством робототехнического манипулятора положение и состояние устройства робототехнического манипулятора далее неизвестны. Затем требуется процедура распознавания. Один или более двигателей принимают, например, двадцать импульсов в определенном направлении. Точное положение первой части рамы и состояние устройства робототехнического манипулятора могут быть получены из перемещения направляющей иглы, как может быть получено и относительное положение второй части рамы и рычага. Когда оно известно, любое перемещение направляющей иглы может быть прогнозировано и может регулироваться блоком воздушного компрессора.
Специалисту в данной области техники должно быть понятно, что могут быть созданы различные модификации вариантов осуществления, описанных здесь, не выходящие за рамки объема изобретения, определяемого нижеследующей формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор модульного типа | 1990 |
|
SU1775289A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ОПРАВКИ В ТРУБОПРОКАТНОМ СТАНЕ | 2012 |
|
RU2547050C1 |
| ЗУБЧАТАЯ ПЕРЕДАЧА С НЕПРЕРЫВНО ИЗМЕНЯЕМЫМ ПЕРЕДАТОЧНЫМ ЧИСЛОМ | 2004 |
|
RU2340815C2 |
| БАРОМЕТРИЧЕСКИЙ ДВИГАТЕЛЬ В.С.ГРИГОРЧУКА | 1997 |
|
RU2116505C1 |
| РАСПРЕДЕЛЕНИЕ КАПЕЛЬ СТЕКЛОМАССЫ | 2007 |
|
RU2434815C2 |
| КОМПАКТНАЯ КОНСТРУКЦИЯ ВСПОМОГАТЕЛЬНОЙ КОРОБКИ ПЕРЕДАЧ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2674299C2 |
| МАЯТНИКОВЫЙ ДВИГАТЕЛЬ | 2018 |
|
RU2691888C1 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2001 |
|
RU2200239C2 |
| Стенд для испытания двигателя внутреннегоСгОРАНия | 1975 |
|
SU850027A3 |
| МЕХАНИЗМ РЕГУЛИРОВАНИЯ ФАЗ ВАЛА | 1996 |
|
RU2176755C2 |
Изобретение относится к двигателю для робототехнического манипулятора и робототехническому манипулятору. Согласно изобретению двигатель содержит зубчатую рейку, имеющую на своей поверхности структуру с периодическим расположением элемента зацепления по меньшей мере в двух направлениях. С упомянутой зубчатой рейкой входит в зацепление множество зацепляющих элементов. Приведение в действие зацепляющих элементов вперед и назад в направлении структуры поверхности периодически и со сдвигом по времени позволяет осуществлять линейное перемещение. Изобретение обеспечивает высокую точность во время линейного движения. 3 н. и 15 з.п. ф-лы, 7 ил.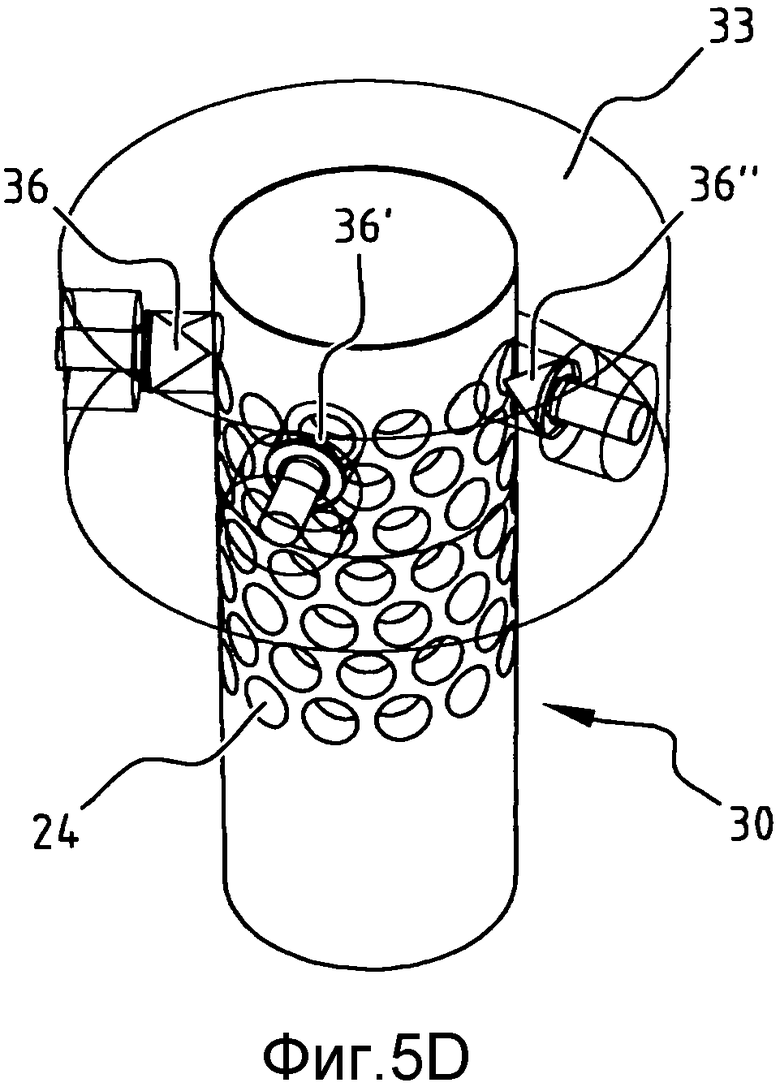
1. Двигатель для робототехнического манипулятора, содержащий:
- элемент зубчатой рейки, имеющий на своей поверхности структуру, причем упомянутая структура имеет расположение элемента зацепления, причем упомянутое расположение является периодическим по меньшей мере в двух направлениях;
- зубчатый элемент, вмещающий набор из множества исполнительных элементов, расположенных в одном направлении из упомянутых по меньшей мере двух направлений, причем каждый из упомянутых исполнительных элементов содержит зацепляющий элемент, имеющий форму для зацепления упомянутого элемента зацепления, и приводной блок для привода упомянутого зацепляющего элемента для осуществления перемещения вперед-назад относительно упомянутой периодической структуры, причем зацепляющий элемент входит в зацепление с упомянутым элементом зацепления во время его перемещения в направлении элемента зацепления, чтобы вызвать относительное перемещение между упомянутым элементом зубчатой рейки и упомянутым зубчатым элементом в упомянутом одном направлении из упомянутых по меньшей мере двух направлений, и при этом каждый из упомянутых исполнительных элементов размещен на расстоянии, чтобы входить в зацепление с упомянутой периодической структурой в другой ее приведенной фазе;
- блок управления для периодического управления каждым приводным блоком каждого исполнительного элемента в наборе исполнительных элементов таким образом, чтобы они действовали со смещением по времени относительно друг друга.
2. Двигатель по п.1, в котором упомянутый элемент зацепления, количество исполнительных элементов в наборе исполнительных элементов, упомянутый блок управления и упомянутое расположение исполнительных элементов конфигурированы таким образом, что относительное перемещение между зубчатым элементом и элементом зубчатой рейки равно или превышает длину элемента зацепления в упомянутом одном направлении из упомянутого по меньшей мере одного направления после того, как блок управления выполнил управление каждым из упомянутых исполнительных элементов в течение одного периода упомянутого периодического управления.
3. Двигатель по п.1, дополнительно содержащий набор исполнительных элементов для каждого из упомянутых по меньшей мере двух направлений.
4. Двигатель по п.1, в котором элемент зубчатой рейки содержит корпус, имеющий элемент зацепления, выполненный с периодическим расположением по всей окружности упомянутого корпуса.
5. Двигатель по п.4, в котором элемент зубчатой рейки имеет, по существу, цилиндрическую форму с периодическим размещением на окружающей поверхности упомянутого цилиндра, причем зубчатый элемент содержит корпус, снабженный круглым отверстием для вмещения по меньшей мере части упомянутого элемента зубчатой рейки, и при этом набор исполнительных элементов размещен в радиальном направлении относительно упомянутого элемента зубчатой рейки.
6. Двигатель по п.5, в котором круглое отверстие образовано круглым сквозным отверстием в упомянутом корпусе.
7. Двигатель по п.5, в котором элемент зацепления распределен по спиральной траектории вокруг упомянутой цилиндрической формы.
8. Двигатель по п.1, в котором блок управления выполнен с возможностью управления приводными блоками в наборе исполнительных элементов таким образом, что по меньшей мере один приводимый в действие зацепляющий элемент входит в зацепление со структурой поверхности в каждый момент времени во время работы двигателя.
9. Двигатель по п.1, в котором приводной блок каждого исполнительного элемента выполнен с возможностью работы в состоянии приведения в действие для приведения в действие упомянутого зацепляющего элемента, чтобы перемещаться в направлении упомянутого элемента зубчатой рейки, и в освобожденном состоянии для перемещения упомянутого зацепляющего элемента от элемента зубчатой рейки, причем упомянутый приводной блок содержит упругий элемент, по меньшей мере выполненный с возможностью функционирования в упомянутом освобожденном состоянии и выполненный с возможностью побуждения зацепляющего элемента перемещаться от элемента зубчатой рейки, и/или приводной блок выполнен с возможностью позволять приводному элементу перемещаться от элемента зубчатой рейки в освобожденном состоянии без приложения силы к зацепляющему элементу.
10. Двигатель по п.1, в котором элемент зацепления содержит коническую полость в поверхности упомянутого элемента зубчатой рейки, в которой зацепляющий элемент имеет соответствующий конический выступ.
11. Двигатель по п.1, содержащий по меньшей мере n исполнительных элементов, принадлежащих к набору, причем n больше или равно двум, и в котором соответствующие исполнительные элементы размещены таким образом, чтобы входить в зацепление со структурой поверхности при приведенной фазе приблизительно m×360/n, где m=1, …, n, соответственно.
12. Двигатель по п.1, в котором приводной блок содержит приводимый в действие цилиндр поршневого типа, причем упомянутый приводимый в действие цилиндр имеет корпус цилиндра и движущийся в нем поршень, причем упомянутый зацепляющий элемент размещен на конце упомянутого поршня.
13. Робототехнический манипулятор, содержащий:
первую часть рамы, выполненную с возможностью установки или размещения на основании робототехнического манипулятора;
вторую часть рамы, соединенную с первой частью рамы;
двигатель по п. 1, обеспечивающий изменение ориентации и/или расстояния первой части и второй части рамы по отношению друг к другу, причем упомянутый зубчатый элемент упомянутого двигателя соединен с упомянутой первой или второй частью рамы, а элемент зубчатой рейки соединен с другой из упомянутой первой и второй части рамы.
14. Робототехнический манипулятор по п.13, причем он дополнительно содержит по меньшей мере пять двигателей по п.1, расположенных с образованием платформы Стюарта.
15. Робототехнический манипулятор по п.13, в котором элемент зубчатой рейки двигателя имеет, по существу, цилиндрическую форму с периодическим размещением на окружающей поверхности упомянутого цилиндра, причем зубчатый элемент содержит корпус, снабженный круглым отверстием для вмещения по меньшей мере части упомянутого элемента зубчатой рейки, и при этом набор исполнительных элементов размещен в радиальном направлении относительно упомянутого элемента зубчатой рейки, при этом первая и/или вторая часть рамы снабжена сквозным отверстием для приема в него зубчатого элемента или элемента зубчатой рейки двигателя.
16. Робототехнический манипулятор по п.15, содержащий шарнир, имеющий предусмотренное в нем сквозное отверстие, причем упомянутый зубчатый элемент или упомянутый элемент зубчатой рейки неподвижно соединен с упомянутым шарниром, при этом шарнир выполнен с возможностью шарнирного соединения упомянутого зубчатого элемента или упомянутого элемента зубчатой рейки с упомянутой первой и/или второй частью рамы.
17. Робототехнический манипулятор по п.16, в котором шарнир представляет собой шаровой шарнир.
18. Двигатель для робототехнического манипулятора, содержащий:
- элемент зубчатой рейки, имеющий на своей поверхности структуру, причем упомянутая структура имеет расположение элемента зацепления, причем упомянутое расположение является периодическим по меньшей мере в двух направлениях;
- зубчатый элемент, вмещающий набор из множества исполнительных элементов, расположенных в одном направлении из упомянутых по меньшей мере двух направлений, причем каждый из упомянутых исполнительных элементов содержит зацепляющий элемент, имеющий форму для зацепления упомянутого элемента зацепления, и приводной блок для привода упомянутого зацепляющего элемента для осуществления перемещения вперед-назад относительно упомянутой периодической структуры, причем зацепляющий элемент входит в зацепление с упомянутым элементом зацепления во время его перемещения в направлении элемента зацепления, чтобы вызвать относительное перемещение между упомянутым элементом зубчатой рейки и упомянутым зубчатым элементом в упомянутом одном направлении из упомянутых по меньшей мере двух направлений, и при этом каждый из упомянутых исполнительных элементов размещен на расстоянии, чтобы входить в зацепление с упомянутой периодической структурой в другой ее приведенной фазе;
при этом приводные блоки выполнены с возможностью внешнего управления.
| DE 29803411 U1, 24.09.1998 | |||
| US 4742614 A, 10.05.1988 | |||
| US 5410638 A, 25.04.1995 | |||
| Светокопировальная машина | 1926 |
|
SU5391A1 |
| RU 2005123963 A, 10.02.2007. | |||

