сл
с
двигателя в поступательное выходного звена манипулятора, Кинетическая энергия. |;чкапливаэмая такими кинематическими цепями, ограничивает возможности манипулятора по части его быстродействия и увеличивает погрешности позиционирования.
Наиболее близким по технической суа(ности к заявляемому, является манипулятор модульного типа, содержащий последовательно соединенные модули перемещений, первый из которых связан с основанием, а последний - с захватом, причем каждый из модулей включает в себя корпус и привод перемещения и стыковочные элементы, в котором с целью расширения технологических возможностей за счет обеспечения инвариантности компоновок, в корпусе каждого модуля перемещения во взаимно перпендикулярных плоскостях выполнены отверстия, а стыковочные элементы выполнен в виде штанг,.установленных в отверстия корпусов смежных модулей посредством введенных втулок, причем корпус одного из смежных модулей перемещений установлен с возможностью перемещения вдоль этих штанг, при этом привод перемещения каждого модуля выполнен в виде зубчато-реечной передачи и силового цилиндра, корпус которого смонтирован на корпусе модуля, а шток жестко связан с рейкой зубчато-реечной передачи, Однако указанный манипулятор в качестве модулей включает в себя механизмы отличающиеся постоянным передаточным отношением, для изменения которого при переналадке манипулятора требуется большой набор звеньев и понижающих редукторов,
Манипулятор кроме электромеханических связей включает в себя и силовые цилиндры, т.е. поступательное перемещение модулей осуществляется с использованием среды под давлением, что, естественно, усложняет его конструкцию, а регулирование скорости перемещения связано с трудно. стяк-и, характерными для силовых цилиндров. Аналогично можно сказать и о реверсировании движения. Эти недостатки манипулятора сказываются на усложнении его конструкции и снижении надежности. Следует подчеркнуть, что модульность и инвариантность компоновок с целью расширения технологических возможио-стей манипулятора реализуется в neiy большим ко/Л1чеством промежуточных звеньев, а увеличение зоны обслуживания ограничено, так как расширение .ее связано со значительным увеличением габаритов манипулятора, материалоемкости его и снижением надежности.
Целью изобретения является расширение технологических возможностей за счет
увеличения зоны обслуживания.
Поставленная цель достигается тем, что корпус каждого модуля перемещения снабжен направляющей, а привод перемещения выходного звена каждого модуля выполнен
в виде двигателя, смонтированного на корпусе, а также гибкой передачи и двух зубчато-реечных передач, зубчатые рейки которых смонтированы соответственно на корпусе и на выходном звене модуля, причем это звено установлено на направляющей корпуса этого же модуля, а зубчатые колеса,передач сблокированы на одном валу, жестко связанном с гибким элементом гибкой передачи, опорные элементы которой размещены соответственно на выходном валу двигателя и на корпусе этого
МОДУ|1Я.
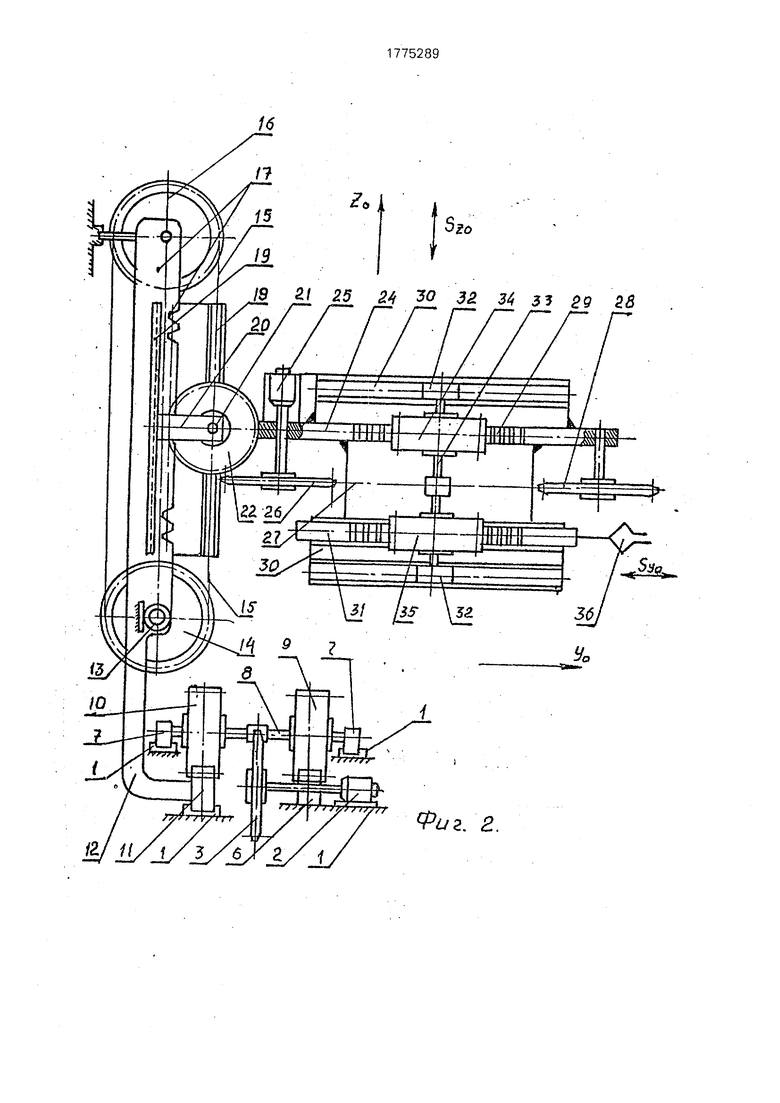
На фиг. 1 изображен манипулятор модульного типа, общий вид; на фиг.2 - вид по
оси Хо на фиг.1; на фиг.З - вид по оси Уо на фиг,1.
Манипулятор модульного типа обладает тремя степенями подвижности, т.е. тремя обобщенными координатами, реализующими движение вдоль взаимно перпендикулярных осей XoYoZo, содержит, установленный на станине (корпус) 1 двигатель 2 (Ml), на выходном валу которого установлено приводное звено 3 трособлочной
системы, бесконечный ремень (цепь) 4 которой связан с блоком 5, установленным с возможностью вращения на неподвижной рейке 6, связанной жестко со станиной 1. В ползуне 7, установленном с возможностью
движения вдоль направляющей станины 1, установлен с возможностью вращения вал 8, на котором жестко закреплен блок зубчатых колес 9 и 10, которые отличаются между собой на незначительное число зубьев (на
незначительную величину диаметра).
Одна из шестерен 9 входит в зацепление с неподвижной рейкой 6, а вторая шестернй 10 входит в зацепление с рейкой 11, устаноелеиной с возможностью поступательного движения в направляющей станины 1 (зубья реек и шестерен условно не показаны). Описанный привод обеспечивает продольное перемещение (вдоль оси Хо) Sxo. С подвижной рейкой 11 жестко связан
(установлен неподвижно) портал 12. (корпус второго) на котором установлен двигатель 13 (М2), на выходном валу которого установлено приводное звено 14 трособлочной системы, бесконечный ремень (цепь) 15
которой связан с блоком 16, установленным с возможностью вращения в портале 12. С порталом 12 жестко связана рейка 17, а подвижная рейка 18 установлена с возможностью поступательного движения в направляющей 19 портала 12,
На той же направляющей 19 с другой стороны портала установлен ползун 20, в котором с возможностью вращения установлен вал 21, на котором жестко закреплен блок зубчатых колес 22 и 23 отличающийся между собой на незначительное число зубьев (на незначительную величину диаметра),
Одна из шестерен 22 входит в зацепление с рейкой 17, а вторая шестерня 23 входит в зацепление с рейкой 18, установленной (как указано выше) с возможностью поступательного движения в направляющей 19 портала 12. Зубья реек и шестерен условно не показаны,
Описанный привод обеспечивает вертикальное перемещение (вдоль оси Zo) SzoС подвижной рейкой 18 жестко связана поперечина 24 (корпус третьего), на которой установлен двигатель 25 (МЗ), на выходном валу которого установлено приводное звено 26 трособлочной системы, бесконечный ремень (цепь) 27 которой связан с блоком 28, установленным с возможностью вращения в поперечине 24, С поперечиной 24 жестко связана рейка 29, а в направляющей 30 поперечины установлена с возможностью движения подвижная рейка 31. На той же направляющей 30 с другой стороны поперечины установлен ползун 32, в котором с возможностью вращения установлен вал 33, на котором жестко закреплен блок зубчатых колес 34, 35 отличающихся между собой на незначительно число зубьев (на незначительную величину диаметра),
Одна из шестерен 34 входит в зацепление с рейкой 29, а вторая шестерня 35 входит в зацепление с рейкой 31, на которой установлен схват 36 манипулятора, а сама рейка установлена (как указано выше) с возможностью поступательного движения в направляющей 30 поперечины 24,
Зубья реек и шестерен условно не показаны.
Описанный привод обеспечивает поперечное перемещение (вдоль оси Уо), Svo Для устойчивости манипулятора портал 12 имеет выносную опору, образующую поступательную кинематическую пару (не показанную на чертеже) со станиной 1.
Манипулятор модульного типа работает следующим образом.
Реверсивный двигатель 2 (Ml) вращает приводноэ звено 3, которое передвигает
бесконечный ремень (цепь) 4 и установленный на нем вал 8 блока зубчатых колес 9 п 10, причем шестерня 9 перекатывается по неподвижной рейке 6. а шестерня 10, при этом, перемещае подвижную рейку 11 вместе с порталом 12 вдоль оси Хр. Получаем продольное перемещение.
Реверсивный двигатель 13 (М2) вращает приводное звено 14. которое передвигает бесконечный ремень (цепь) 15 и установлен ный на нем вал 21 блока зубчатых колес 22 и 23, причем шестерня 22 перекатывается по неподвижной рейке 17 портала 12, а шестерня 23, при этом, переме1цает подвижную рейку 18 вместе с поперечиной 24 вдоль оси Zo, Получаем вертикальное перемещение,
Реверсивный двигатель 25 (МЗ) вращает приводное звено 26, которое передвигает бесконечный ремень (цепь)27 и установленный на нем вал 33 блока зубчатых колес 34 и 35, причем шестерня 34 перекатывается по неподвижной рейке 29 поперечины 24, а шестерня 35 при этом перемещает подви.жную рейку 31 вместе с схватом 36 вдоль оси Уо,
Получаем поперечное перемещение. Портал 12 для устойчивости манипулятора имеет выносную опору, образующую поступательную кинематическую пару (не показанную на чертеже) со станиной 1.
Предлагаемое техническое решение в отличие оттехнического решения принятого за прототип, хотя и имеет общность в части инвариантности компоновки, в качестве модулей включает в себя механизмы отличаю- щиеся большим диапазоном изменения передаточного отношения, который (диапазон) может быть реализован минимальным количеством звеньев без понижающих редукторов.
Предлагаемый манипулятор, при однажды выбранной постоянной длине его звеньев, может обслужить определенное пространство , а в нем - доставить схват в любую точку, без значительного увеличения длины звеньев в силу более простой конструкции в сравнении с прототипом и того, что включает в себя только электромеханические связи. В манипуляторе отсутствуют силовые цилиндры, т.е. поступательное движение вдоль осей координат и регулировзние скорости его не связаны с использованием энергии среды под давлением. В этой части, надо полагать, что надежность предлагаемого технического ре1иения будет выше в сравнении с прототипом и конструкция его будет проще, а модульность и инвариантность компоновок реализуется
меньшим количеством промежуточных звеньев,
Оно отличается однотипностью передаточных и исполнительных механизмое, положенных в основу манипулятора, при этом передаточные и исполнительные механизмы объединены новыми связями, позволяющими существенно сократить длины кинематических цепей путем подбора звеньев и сочетания механизмов, преобразующих вращательное движение в поступательное, а также их взаимного относительного расположения.
Предлагаемый манипулятор, несмотря на кажущуюся неустойчивость, легко превращается в устойчивый, если, как указано выше, снабдить его выносной опорой портала (не показана), образующей поступательную кинематическую пару со станиной,
Формула изобретения
Манипулятор модульного типа, содержащий основание, захаат и модули перемеY
щений, каждый из которых включает корпус и выходное звено с приводом его перемещения, причем корпус жестко связан с выходным звеном предыдущего модуля, о т л и ч аю щ и и с я тем, что, с целью расширения технологических возможностей за счет увеличения зоны обслуживания, корпус каждого модуля перемещения снабжен направляющей, а привод перемещения выходного звена каждого модуля выполнен в виде двигателя, смонтированного на корпусе, а также гибкой передачи и двух зубчатореечных передач, зубчатые рейки которых смонтированы соответственно на корпусе и
на выходном звене модуля, причем это звено установлено на направляющей корпуса этого же модуля, а зубчатые колеса передач сблокированы на одном валу, жестко связанном с гибким элементом гибкой передачи, опорные элементы которой размещены соответственно на выходном валу двигателя и на корпусе этого модуля.
ФигЛ uz. г.



| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1983 |
|
SU1122502A1 |
| ГИДРОФИЦИРОВАННЫЙ СТАНОК ДЛЯ ЗАТОЧКИ ПРОТЯЖЕК | 1971 |
|
SU310783A1 |
| АВТОМАТИЧЕСКАЯ ЛИНИЯ ДЛЯ ШТАМПОВКИ КРУПНОГАБАРИТНЫХ ДЕТАЛЕЙ | 1992 |
|
RU2041001C1 |
| Способ изготовления теплообменников и стан для его осуществления. Устройство для передачи длинномерных изделий на обработку. Трубогибочная машина | 1981 |
|
SU1011322A1 |
| Манипулятор | 1989 |
|
SU1743850A1 |
| ПРИВОД ШТАНГОВОГО ГЛУБИННОГО НАСОСА | 2012 |
|
RU2488023C1 |
| Манипулятор с возвратно-поступательным движением захватных устройств | 2023 |
|
RU2822909C1 |
| Универсальный механизм перемещения | 2017 |
|
RU2650473C1 |
| МАНИПУЛЯТОР ДЛЯ ПРЕЦИЗИОННОГО ПОЗИЦИОНИРОВАНИЯ | 2013 |
|
RU2547981C2 |
| МАНИПУЛЯТОР ДЛЯ ОЧИСТКИ ВАГОНОВ С ДВУХСКАТНЫМ ПОЛОМ | 1989 |
|
RU2026215C1 |

Использование: автоматизация вспомогательных операций в машиностроении. Сущность изобретения: манипулятор модульного типа состоит из основания, захвата и модулей перемещений, каждый изкоторых включает корпус, направляющую и выходное звено с приводом его перемещения в виде двигателя, размещенного на корпусе, гибкий передачи и двух зубчато- реечных передач, рейки которых смонтированы соответственно на корпусе и на выходном звене модуля, а зубчатые колеса сблокированы на одном валу, жестко связанном с гибким элементом гибкой передачи, опорные элементы которой размещены соответственно на выходном валу двигауеля и на корпусе этого модуля. Причем корпус каждого модуля жестко связан с выходным звеном предыдущего модуля. 3 ил.
| Манипулятор модульного типа | 1988 |
|
SU1558663A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
