Область техники
Настоящее изобретение направлено на получение способа для обнаружения ухудшения рабочих характеристик датчика аэродинамических углов в устройстве измерения угла потока, установленном как на движущихся транспортных платформах, так и на стационарных платформах. Настоящее изобретение, в частности, направлено на создание компьютерной системы и способа, в котором используется перемещение от вибрации датчика, расположенного в устройстве измерения угла потока, для обнаружения ухудшения рабочих характеристик в результате изменений динамической характеристики, вызванных поврежденными или изношенными механическими компонентами датчика.
Уровень техники
Устройства измерения угла потока, такие как устройство измерения угла атаки летательного аппарата (ЛА) и устройство измерения угла бокового скольжения, подвержены ухудшению рабочих характеристик и повреждениям, исходящим от многих источников, таких как повреждение, полученное от постороннего предмета (ПСП), внутренняя электрическая дуга, возникшая вследствие удара молнии, воздействие влажности окружающей среды или проникновение посторонних объектов. Эти события, будучи необнаруженными, могут отрицательно воздействовать на точность как статического, так и динамического измерения угла потока этих устройств. Обычно эти ошибки должны обнаруживаться после проводимого вручную осмотра датчика или посредством сравнения его с другими датчиками, установленными на платформе. В некоторых прикладных ситуациях по использованию платформы основное ограничение существующего способа состоит в том, что осуществляемые вручную проверки можно выполнять только тогда, когда платформа неподвижна или не используется иным образом, и их выполнение происходит только после выявления проблемы другими средствами. Способ перекрестного сравнения параметров датчика, который можно было бы использовать в работе, обычно может обнаруживать только значительные погрешности и оказаться восприимчивым к проблемам, которые возникают в процессе общего режима работы. Настоящее изобретение решает эти проблемы, обеспечивая средства для обнаружения ухудшения рабочих характеристик и повреждения в пределах самого устройства в процессе его использования и на регулярной основе без обращения к проводимому извне мониторингу.
Сущность изобретения
Для обнаружения ухудшения рабочих характеристик и повреждения устройств измерения угла потока, как обсуждено выше, настоящее изобретение направлено на создание компьютерной системы и способа, в котором используется непрерывное движение, создаваемое вибрацией датчика, расположенного в устройстве измерения угла потока, для оперативного обнаружения ухудшения рабочих характеристик в результате изменения динамической характеристики поврежденных или изношенных механических компонентов.
В соответствии с проиллюстрированным воплощением изобретения такое изобретение обеспечивает средства для обнаружения повреждения и/или ухудшения рабочих характеристик у датчика измерения угла потока во время обычной работы в автоматическом режиме и на регулярной основе без обращения к проводимому извне мониторингу. В настоящем изобретении предпочтение отдается проводимому в реальном времени анализу динамических характеристик датчика аэродинамических углов для обнаружения повреждения и/или ухудшения его динамических характеристик. В противоположность этому технология известного уровня техники полагается на проводимый вручную осмотр датчика или на сравнение его с аналогичными датчиками, установленными на платформе.
В соответствии с проиллюстрированным воплощением изобретения и в одном аспекте изобретение связано со способом для обнаружения ухудшения рабочих характеристик датчика аэродинамических углов, расположенного в устройстве измерения угла потока, включая этапы введения текущих данных о платформе и определения нахождения текущих данных о платформе в предопределенных пределах. Если текущие данные о платформе находятся в предопределенных пределах, то текущее значение угла флюгерного датчика аэродинамических углов считывается и запоминается в Матрице Углов флюгерного Датчика. Затем для получения Матрица Данных Скорости вычисляются средние значения текущего состояния окружающей среды вокруг платформы, в состав которых предпочтительно входят воздушная скорость, высота и температура. Следующий этап включает поиск соответствующих значений для Коэффициентов Фильтра Углов и Порога Вибрации, основанных на вычисленных средних значениях текущих данных о платформе, и использование Коэффициентов Фильтра Углов для выборки значений из Матрицы Углов флюгерного Датчика с целью вычисления значений Матрицы Вибрации. Впоследствии выполняется вычисление значения уровня шума из Матрицы Вибрации, где значение уровня шума предпочтительно представляет собой амплитудно-частотную характеристику выходных вибраций флюгерного датчика. Затем выполняется определение возможного превышения уровнем шума текущего Порога Вибрации, основанного на вычисленном уровне шума из Матрицы Вибрации. Если уровень шума текущей работы Флюгерного Датчика превышает Пороговую Вибрацию, то появляется выходной сигнал неисправности, или же если уровень шума текущей работы Флюгерного Датчика оказывается ниже Пороговой Вибрации, появляется сигнал успешного прохождении теста.
Краткое описание чертежей
Цели и особенности изобретения можно понять, ссылаясь на следующее подробное описание иллюстративного варианта исполнения настоящего изобретения, рассматриваемого совместно с сопроводительными чертежами, где:
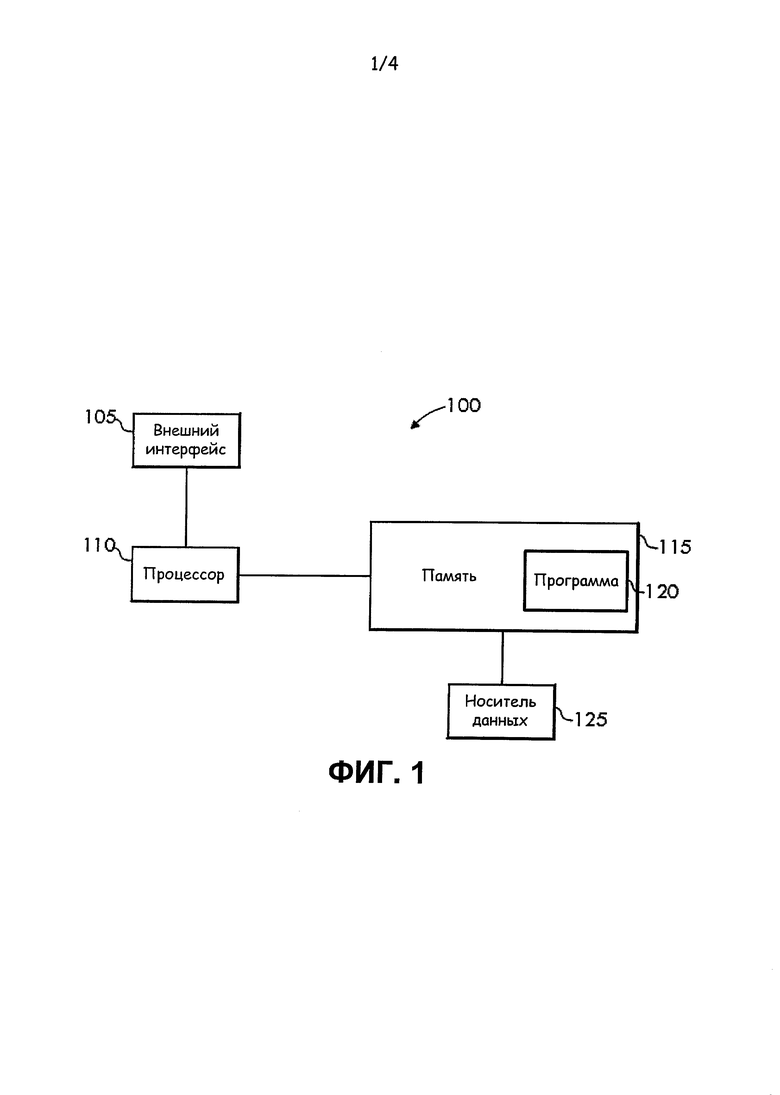
Фиг.1 представляет собой блок-схему, которую можно использовать в некоторых вариантах исполнения изобретения;
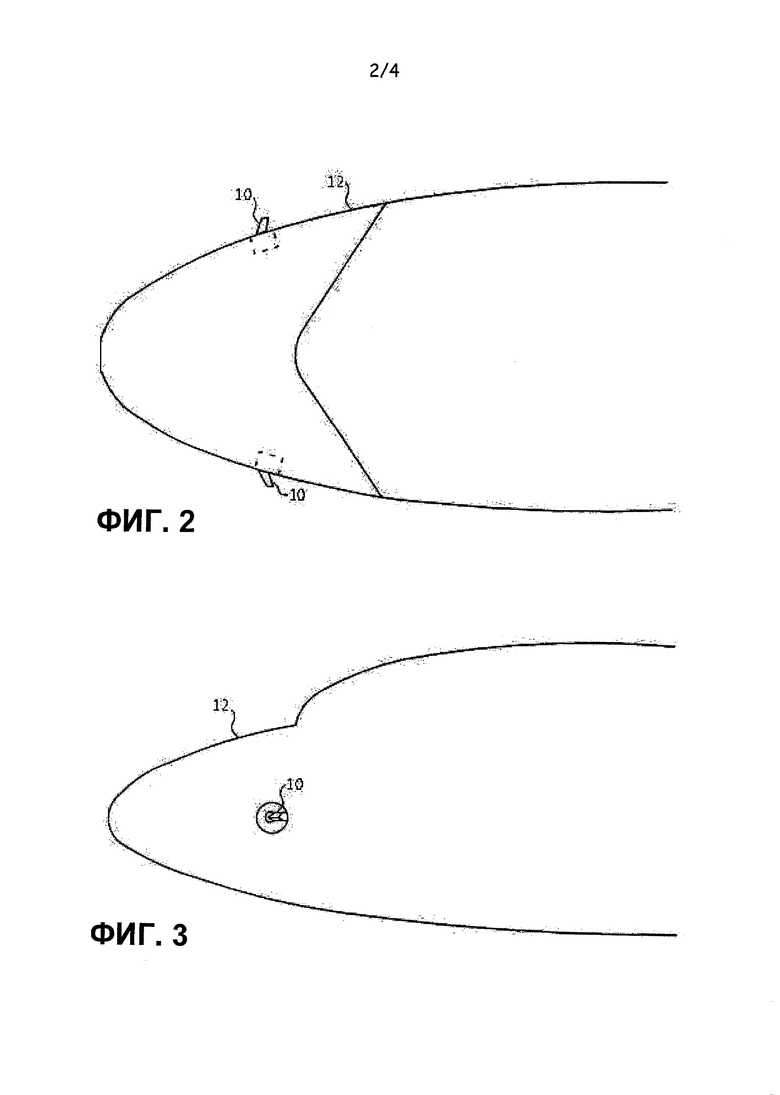
Фиг.2 - это вид сверху носа ЛА, показывающий расположение датчиков аэродинамических углов потока, установленных по бокам фюзеляжа в иллюстративном варианте исполнения изобретения;
Фиг.3 - это вид сбоку носа ЛА, показывающий расположение датчиков аэродинамических углов потока, установленных по бокам фюзеляжа в иллюстративном варианте исполнения изобретения;
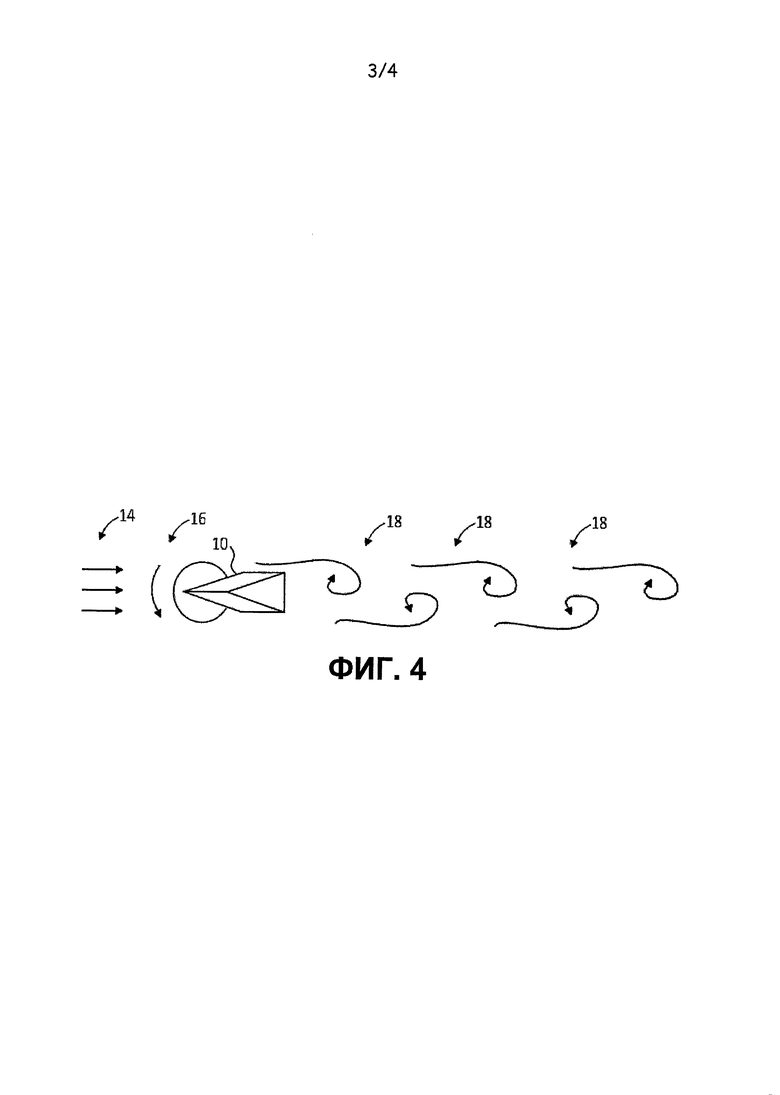
Фиг. 4 - это диаграмма вихреобразования, показывающая в иллюстративном воплощении предмета изобретения вид сверху датчика аэродинамических углов потока, направления потока свободно входящего воздуха и компоненты вихря во время его образования; и
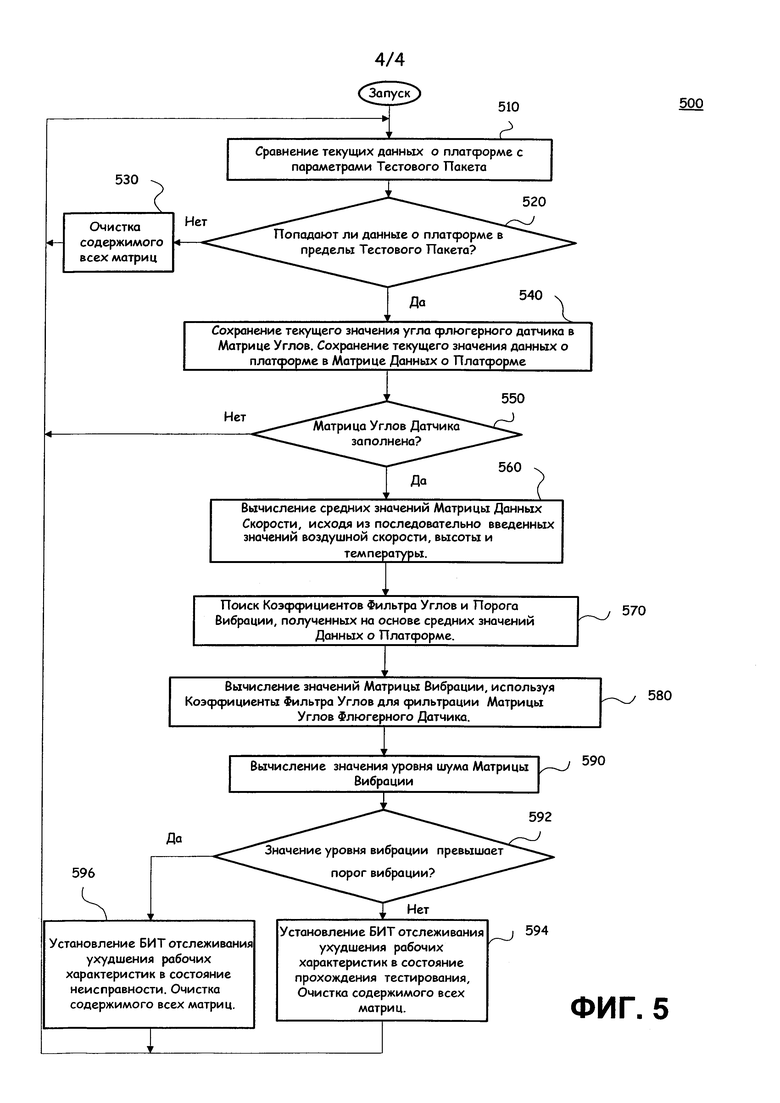
Фиг. 5 - блок-схема, описывающая этапы, включенные в компьютерный способ настоящего изобретения для выполнения обнаружения ухудшения рабочих характеристик у датчика аэродинамических углов.
Подробное описание определенных вариантов исполнения изобретения
В настоящее время данное изобретение описывается более полно с упоминанием сопроводительных чертежей, на которых показан иллюстративный вариант исполнения изобретения. Изобретение никак не ограничено иллюстративным вариантом исполнения, потому что нижеописанный иллюстративный вариант исполнения - это просто образец изобретения с возможным вариантом исполнения в различных формах, которые может оценить по достоинству специалист из предметной области. Следовательно, нужно понимать, что любые структурные и функциональные подробности, показанные здесь, не следует интерпретировать как ограничение притязаний изобретения, скорее они представлены как репрезентативный вариант исполнения изобретения для обучения специалистов из предметной области или как еще один способ реализации этого изобретения. В дальнейшем термины и фразы, используемые в данной работе, не носят ограничительного характера, они скорее предназначены для обеспечения понятного описания изобретения. В дополнение к этому цифры наподобие ссылок должны восприниматься как ссылки на подобные элементы.
Следует оценить по достоинству то, что варианты исполнения данного изобретения, как обсуждается ниже, могут быть включены в качестве алгоритма программного обеспечения, программы или кода, хранимого в аппаратно-программном обеспечении и/или носителе, используемом в компьютере (включая модули программного обеспечения и вставки кода браузера) с управляющей логикой для разрешения выполнения такого кода в компьютерной системе, обеспеченной процессором. Такая компьютерная система обычно содержит память, сконфигурированную таким образом, чтобы обеспечить получение выходных данных после выполнения компьютерного алгоритма или программы. Также должна быть понятна и оценена по достоинству компьютерная система, которая может располагаться на транспортном средстве (например, на ЛА или на судах), оборудованном одним датчиком аэродинамических углов (например, устройством измерения аэродинамического угла потока), который является предметом изобретения, для обнаружения ухудшения рабочих характеристик указанного датчика посредством мониторинга вибраций. Однако также должна быть понятна и оценена по достоинству вышеуказанная компьютерная система, которая может располагаться также и на внешней части вышеуказанного транспортного средства.
Образец компьютерной системы показан в виде блок-схемы на Фиг. 1, изображающей компьютерную систему. И хотя система 100 представлена в данной работе как автономная система, она не ограничена таким вариантом исполнения и вместо этого может быть подсоединена через сеть (не показано) к другим компьютерным системам или представлена в других упомянутых ниже вариантах исполнения. Система 100 предпочтительно состоит из внешнего интерфейса 105, процессора 110 (такого как цифровой процессор для обработки данных) и памяти 115. Память 115 предназначена для хранения данных и инструкций, применяемых для управления работой процессора 110.
Реализация памяти 115 может охватывать память с произвольным доступом (RAM), жесткий диск и постоянную память (ROM) или любой из этих компонентов. Одним из компонентов, хранимых в памяти 115, является программа 120.
Программа 120 содержит инструкции для управляющего процессора 110. Программа 120 может быть реализована как отдельный модуль или множество совместно работающих модулей. Программа 120 рассматривается как представляющая воплощение программного обеспечения способа 200, описанного ниже в данной работе.
Внешний интерфейс 105 может быть реализован на таком входном устройстве, как клавиатура, сенсорный экран, планшет, прикладной программный интерфейс для предоставления услуг сети, подсистема распознавания речи или сеть для мобильной связи, предназначенном для предоставления пользователю возможности передавать выбранную информацию и команды в процессор 110. Внешний интерфейс 105 также может быть реализован на таком выходном устройстве, как дисплей или принтер. В случае применения сенсорного экрана входная и выходная функции обеспечиваются одной и той же структурой. Средство управления курсором, такое как мышь, шаровой манипулятор или джойстик, позволяет пользователю управлять курсором на экране дисплея для передачи дополнительной информации и выбранных команд в процессор 110. В рассмотренных альтернативных воплощениях настоящего изобретения программа 120 может работать полностью без входных данных пользователя или других команд, основанных на программном или автоматическом доступе к потоку информационных сигналов, поступающих через другие системы, которым по иной причине может понадобиться или не понадобиться пользовательский интерфейс.
В то время как программа 120 указывается как уже загруженная в память 115, ее можно сконфигурировать на носителе данных 125 для последующей загрузки в память 115. Носители данных 125 могут быть традиционными носителями массовой памяти, такими как магнитная лента, носители на оптической памяти, компакт-диски, гибкие диски, устройство памяти на кремниевых элементах или всеми прочими носителями данных. В качестве альтернативы носитель данных 125 может быть памятью с произвольным доступом или другим типом электронной памяти, расположенной в удаленном запоминающей устройстве, таком как сервер, который доставляет программу 120 для установки и запуска с устройства пользователя.
Способ 500, описанный в данном изобретении, указан в связи с блок-схемой, описанной на Фиг. 5 с целью облегчения общего описания для главных процессов иллюстративного варианта исполнения изобретения; однако некоторые блоки можно вызывать в таком произвольном порядке, когда события запускают поток программ, как это происходит в объектно-ориентированной программе. Соответственно блок-схему следует понимать как образец потока, а программные блоки как компоненты, которые могут быть вызваны в порядке, отличном от проиллюстрированного порядка.
Фиг.1 предназначена для обеспечения краткого и общего описания иллюстративной и/или подходящей образцовой среды, в которой могут быть реализованы воплощения нижеописанного настоящего изобретения. Фиг.1 - это пример подходящей среды, не предназначенный для предложения введения каких-либо ограничений в отношении структуры, сферы применении или функциональности воплощения настоящего изобретения. Конкретную среду следует интерпретировать как ту, которой присуща зависимость или требование, связанное с какой-либо комбинацией компонентов, проиллюстрированных в образцовой операционной среде. Например, в некоторых определенных случаях один или несколько элементов среды покажутся ненужными и не рассматриваются. В других случаях один или несколько других элементов могут показаться необходимыми и будут добавлены.
В описании, которое последует, определенные варианты исполнения изобретения могут быть описаны со ссылкой на действия и символические представления операций, которые выполняются одним или несколькими вычислительными устройствами, такими как устройства, входящие в состав операционной среды 100 из Фиг.1. В этом случае будет понятно, что такие действия и операции, на которые временами ссылаются как на выполняемые компьютером, содержат управляющие команды процессора компьютера, представленные в виде электрических сигналов и отображающие данные в структурированном виде. Эти управляющие команды преобразуют данные или сохраняют их в ячейках системы памяти компьютера, реконфигурируют или иначе изменяют работу компьютера способом, понятным для лиц, квалифицированных в предметной области. Структуры, в которых сохраняются данные, - это физические ячейки памяти, обладающие особыми свойствами, определяемыми форматом данных. Однако в то время как вариант выполнения изобретения описывается в предшествующем контексте, это не означает, что оно будет носить ограничительный характер, если лица, квалифицированные в предметной области, примут во внимание, что описанные в дальнейшем действия и операции также могут быть реализованы в виде аппаратного обеспечения.
Варианты исполнения изобретения могут быть описаны в пределах общего контекста выполняемых компьютером инструкций, таких как программные модули 120, исполняемые компьютерной системой 100. В общем случае программные модули 120 содержат стандартные программы, программы, объектные модули, компоненты, структуры данных и т.д., которые выполняют конкретные задачи или реализуют конкретные абстрактные типы данных. Воплощение изобретения также можно практиковать в распределенной вычислительной среде, где задачи выполняются с помощью устройств удаленной обработки, которые связываются друг с другом через коммуникационную сеть. В распределенной вычислительной среде программные модули 120 могут располагаться как на локальных, так и на удаленных носителях компьютерных данных.
Принимая во внимание описанную выше компьютерную систему 100 и в соответствии с проиллюстрированным вариантом исполнения изобретения, а также ссылаясь в данный момент на Фиг. 2-5, настоящее изобретение контролирует колебательные характеристики устройства измерения аэродинамических углов для потока текучей среды 10. Как лучше всего видно на Фиг. 2 и 3, устройство измерения аэродинамических углов для потока текучей среды 10 показано установленным на каждой из сторон носа ЛА 12. Следует оценить и понимать тот факт, что настоящее изобретение не должно восприниматься как ограничение такого устройства измерения аэродинамических углов для потока текучей среды 10. Оно скорее может охватывать многообразие устройств измерения аэродинамических углов потока для проведения измерения таких параметров как угол атаки и/или охватывать устройство измерения угла атаки, и/или оно может охватывать устройство измерения угла бокового скольжения.
Вышеупомянутые колебания, которые контролируются с помощью изобретения, обычно известны под названием «вибрация», которая вызывается вихреобразованием в той части датчика аэродинамических углов 10, что подвергается действию потока так, как показано на Фиг.4. Если ссылаться на Фиг.4, то стрелки 14 указывают на спокойный невозмущенный поток воздуха; стрелка 16 показывает направление колебательного движения, вызванного вихреобразованием; стрелки 18 указывают на серию вихрей, которые образуются крылом датчика и также известны под названием «Улица вихрей Кармана». Эта вибрация определяется амплитудой и частотой колебаний, и эти характеристики повторяются для конкретных рабочих условий. Обращаясь к характеристикам вибрации датчика, система и способ настоящего изобретения способны определить, работает ли датчик 10 в нормальном диапазоне колебаний.
Также должно быть понятно, что вышеуказанное появление упомянутых характеристик вибрации зависит от конкретных рабочих условий устройства 10. В результате такой зависимости алгоритм компьютерной программы, предпочтительно записанный в программный модуль 120 системы 100, считывает поступающие от платформы оперативные данные устройства 10 как входные сигналы и определяет, каким должен быть подходящий критерий приемлемости. Уровни критериев приемлемости основываются на обнаруженном уровне вибрации в пределах временного сигнала об аэродинамических углах.
Теперь, ссылаясь на Фиг.5, покажем блок-схему реализованного на компьютере способа 500, иллюстрирующего шаги алгоритма компьютерной программы, выполненные в компьютерной системе 100 для обнаружения ухудшения направленного под углом потока в вихреобразовании, вызванного вибрацией датчика аэродинамических углов потока 10, в соответствии с иллюстрированным вариантом исполнения изобретения.
Начиная с шага 510, система 100 сравнивает текущие данные (например, воздушную скорость, высоту, температуру, угол атаки, угловую скорость крена и т.д.) среды пребывания платформы (например, ЛА) с предопределенными и хранимыми значениями ("Тестовый Пакет") этих параметров для определения необходимости проведении теста с целью выявления ухудшения рабочих характеристик у датчика аэродинамических углов. Затем на шаге 520 система предпочтительно принимает решение - либо следовать далее алгоритму обнаружения (с помощью программного модуля 120) или начать его выполнять заново (шаг 510) на основании результатов сравнения, сделанных на шаге 510 в том случае, если данные не находятся в пределах предопределенного тестового пакета. Таким образом, в случае определения решения на шаге 520 как «нет» вычислительный процесс переходит на шаг 530, в течение которого данные, хранимые после выполнения предыдущего цикла (шаги 510-520) и уже недействительные, удаляются из системы 100.
Однако если на шаге 520 система определяет свое решение как «да», то вычислительный процесс переходит на шаг 540, в течение которого данные о платформе, упоминаемые на шаге 510, запоминаются в соответствующем наборе матриц (например, текущие данные о платформе сохраняются в Матрице Данных Платформы, а текущий Угол Флюгерного Датчика запоминается в Матрице Угла Флюгерного Датчика, располагаемой предпочтительно в области памяти системы 100). Должно быть понятно и определено, что Матрица Углов Флюгерного Датчика предпочтительно представлена временной последовательностью обнаруженных значений углов отклонения флюгерного датчика, в результате чего после сбора достаточного количества информационных точек Матрица Угла Флюгерного Датчика считается заполненной.
После этого вычислительный процесс переходит на шаг 550, во время которого система 100 определяет количественную достаточность данных для выполнения оценки ухудшения рабочих характеристик. Если «нет», что означает наличие неполного набора данных, то вычислительный процесс системы 100 возвращается к Запуску сбора большего объема данных из предпочтительного устройства 10. И если "да", что означает заполнение набора данных для Матрицы Угла Флюгерного Датчика, то вычислительный процесс переходит на шаг 560, в течение которого система 100 вычисляет средние значения параметров окружающей среды платформы и Матрицу Данных Скорости на основании введенных временных рядах значений воздушной скорости, высоты и температуры.
После шага 560 вычислительного процесса, выполненного системой 100, вычислительный процесс переходит на шаг 570, где на основании результатов вычислений, проделанных на шаге 560, вычислительный процесс системы 100 выполняет поиск соответствующих значений Коэффициентов Углового Фильтра и Порога Вибрации предпочтительно в поисковой таблице или в аналогичном компоненте системы 100. Должно быть понятно и определено то, что Порог Вибрации представляет собой характерный уровень шума, посредством которого определяется нормальная или аномальная работа флюгерного датчика, по результатам этого определения уровни вибрации за Порогом Вибрации полагаются либо нормальными, либо нет. Далее должно быть понятно и оценено по достоинству то, что вместо поиска соответствующих значений для Коэффициентов Углового Фильтра можно использовать фиксированный фильтр или подобные ему средства.
Затем вычислительный процесс системы 100 переходит к шагу 580, где на основании Коэффициентов Углового Фильтра, определенных на шаге 570, для вычисления Матрицы Вибрации с помощью Коэффициентов Углового Фильтра, предназначенных для выборки значений из Матрицы Угла Флюгерного Датчика, в отношении Матрицы Угла Флюгерного Датчика применяется фильтр с подстраиваемой полосой пропускания. Затем вычислительный процесс переходит на шаг 590, во время которого система 100 вычисляет значение уровня шума для Матрицы Вибрации. Должно быть понятно и оценено по достоинству то, что значение уровня шума является амплитудно-частотной характеристикой выходной вибрации Флюгерного датчика.
Затем процесс переходит на шаг 592, во время которого система 100 определяет, попадает ли вибрация текущей работы Флюгерного датчика, измеренная по уровню шума (и значению уровня вибрации), за пороговое значение вибрации, выбранное из Порога Вибрации так, как было определено на шаге 570. Если "да", то система 100 генерирует выходной сигнал неисправности (шаг 594), устанавливающий БИТ Мониторинга Ухудшения Рабочих Характеристик, что означает неисправность, и после этого предпочтительно стереть все данные и вернуть вышеуказанный процесс в начальное положение (Старт). А если «нет» (вибрация текущей работы флюгерного датчика, измеренная по уровню шума (и по значению уровня вибрации), не выходит за пределы порогового значения вибрации), то система 100 генерирует выходной сигнал успешного прохождения тестирования (шаг 596), устанавливающий БИТ Мониторинга Ухудшения Рабочих Характеристик в статус успешного прохождения тестирования. После этого предпочтительно стереть все данные и вернуть вышеуказанный процесс в начальное положение (Запуск).
Должно быть понятно и определено то, что к некоторым из преимуществ, обеспеченных вышеупомянутой вычислительной системой и способом изобретения, относится обеспечение повышенной безопасности транспортного средства, которое полагается на устройство измерения аэродинамических углов потока текучей среды в результате, по меньшей мере, снижения вероятности необнаруженной скрытой неисправности в таком устройстве измерения аэродинамических углов потока текучей среды. Помимо этого также обеспечивается запас повышенной безопасности вышеуказанного транспортного средства за счет обнаружения неисправности в процессе работы, а не во время простоев устройства, организованных для оценки его состояния. В дополнение к этому обеспечиваются сниженные затраты на обслуживание устройства за счет устранения необходимости его визуального осмотра специалистами по обслуживанию после эксплуатации транспортного средства в среде, которая является потенциальным источником возникновения неисправностей, такой как конвективная погода, а также вследствие снижения количества демонтажей и повторных монтажей устройства без признаков ухудшения рабочих характеристик для проведения его проверки. Также должно быть понятно и оценено то, что изобретение, описанное, по меньшей мере, в соответствии с иллюстрированным вариантом исполнения, может быть использовано в комбинации с другим приспособлением как компонент любого свободно двигающегося транспортного средства, включая устройства, используемые для обнаружения аэродинамических углов потока в текучих средах, отличных от воздуха.
В том значении, что используется в этой работе, термин «процесс» по своей интерпретации является синонимом любого кода или программы, которые могут выполняться в процессоре главных компьютеров (например, система 100), независимо от места их записи - будь то аппаратное обеспечение, программно-аппаратное обеспечение или продукт программного обеспечения, хранимый на диске или в запоминающем устройстве, либо программа, выгруженная из удаленного компьютера. К вариантам исполнения изобретения, описанным в данной работе, относится программное обеспечение для решения уравнений, формирования соотношений и составления алгоритмов, описанных выше. Лица, квалифицированные в предметной области, через некоторое время достойно оценят характеристики и преимущества изобретения, основанного на его вышеописанных вариантах исполнения. Соответственно изобретение не ограничено тем, что было подробно показано и написано, за исключением того, что указано в прилагаемых пунктах патентной формулы. Все публикации и ссылки, упомянутые в этом описании, включены в него в полном объеме.
О предлагаемых на выбор воплощениях настоящего изобретения также можно сказать, что они в широком плане состоят из частей, элементов и особенностей, упоминаемых или указываемых в этой работе, отдельно или вместе, в любой или во всех комбинациях из одной или нескольких частей, элементов или особенностей, где конкретные целые числа упоминаются в этой работе и обладают известными эквивалентами в предметной области, к которой относится настоящее изобретение. Такие известные эквиваленты полагаются учтенными в этой работе так, как если бы они были изложены отдельно.
Хотя в настоящем изобретении описаны проиллюстрированные варианты исполнения, следует понимать, что различные изменения, замены и исправления могут быть реализованы лицами, квалифицированными в предметной области, без отклонения от объема притязаний по настоящему изобретению.
Квалифицированные специалисты в предметной области легко распознают многочисленные дополнительные адаптации и модификации, которые могут быть привнесены в настоящее изобретение, находясь в его пределах, что определено в пунктах прилагаемой формулы изобретения. Помимо этого предприняты усилия, чтобы объем притязаний по настоящему изобретению охватывал все предсказуемые эквиваленты элементов, структур и этапов способа, описанные со ссылкой на чертежи. Соответственно изобретение должно быть ограничено объемом пунктов патентной формулы и их эквивалентами.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ и система для информирования о характеристиках работы газовой турбины в реальном времени | 2013 |
|
RU2627742C2 |
| Способ и система для контроля состояния группы установок | 2013 |
|
RU2636095C2 |
| АНАЛИЗ СТРАТИГРАФИИ ТРЕЩИН | 2013 |
|
RU2599914C1 |
| ОБНАРУЖЕНИЕ НЕШТАТНЫХ СИТУАЦИЙ | 2019 |
|
RU2766106C1 |
| Способ и система управления машиной | 2017 |
|
RU2727839C2 |
| ИНФОРМАЦИЯ О ПОГОДНЫХ УСЛОВИЯХ НА ОСНОВЕ МАГНИТОМЕТРОВ | 2014 |
|
RU2582500C2 |
| ПРОВЕРКА ПРАВИЛЬНОСТИ РАСХОДОМЕРА | 2011 |
|
RU2560139C2 |
| УЛЬТРАЗВУКОВАЯ РАСХОДОМЕРНАЯ СИСТЕМА С ПРЕОБРАЗОВАТЕЛЕМ ДАВЛЕНИЯ, РАСПОЛОЖЕННЫМ ВЫШЕ ПО ПОТОКУ | 2013 |
|
RU2601223C1 |
| СИСТЕМА ДАТЧИКОВ РАБОЧЕЙ ТЕКУЧЕЙ СРЕДЫ ДЛЯ СИСТЕМ ГЕНЕРАЦИИ ЭЛЕКТРОЭНЕРГИИ | 2012 |
|
RU2604468C2 |
| ОЦЕНКА СРОКА СЛУЖБЫ ЦИКЛОНА НА ОСНОВАНИИ ОСТАВШЕЙСЯ ТОЛЩИНЫ АБРАЗИВОСТОЙКОЙ ФУТЕРОВКИ | 2019 |
|
RU2764214C1 |
Изобретение относится к измерительной технике и может быть использовано для градуировки датчиков аэродинамического угла летательных аппаратов. Способ заключается в контроле вибраций датчика, превышение которых свыше определенного уровня происходит в результате изменений динамической характеристики, вызванных поврежденными или изношенными механическими компонентами датчика. Система использует компьютерную обработку сигналов вибраций для выявления повреждений датчика. Технический результат заключается в возможности обнаружения ухудшения рабочих характеристик и повреждений устройства непосредственно в процессе его использования. 3 н. и 21 з.п. ф-лы, 5 ил. 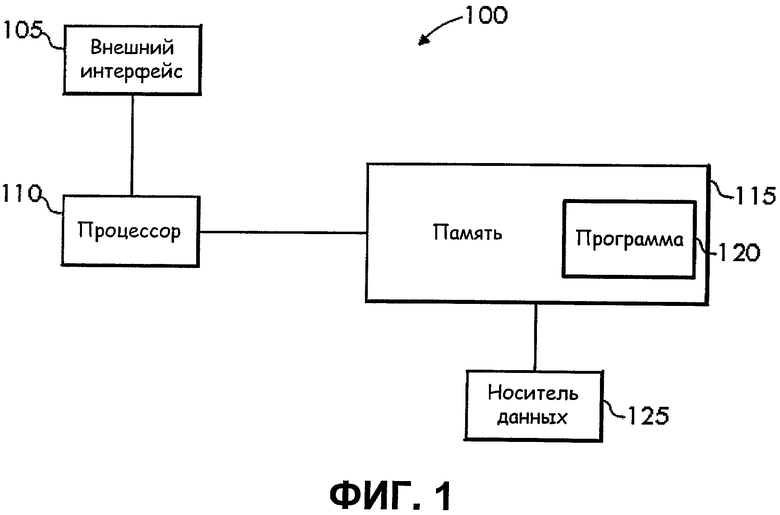
1. Способ обнаружения ухудшения рабочих характеристик углового датчика в устройстве измерения угла потока, включающий этапы:
ввод текущих данных о платформе и определение того, находятся ли текущие данные о платформе в предопределенных пределах;
детектирование и сохранение текущего угла флюгерного датчика на угловом датчике в массиве углов флюгерного датчика при условии нахождения данных о платформе в предопределенных пределах;
вычисление средних из текущих значений параметров окружающей среды платформы, которая включает по меньшей мере один из следующих параметров: воздушная скорость, высота над уровнем моря или температура, для формирования массива данных скорости посредством поиска соответствующих значений для коэффициентов фильтра углов и порога вибраций, исходя из вычисленных средних значений из текущих данных о платформе, и посредством коэффициентов фильтра углов отфильтровать массив углов флюгерного датчика с целью вычисления массива вибрации;
вычисление значения уровня шума массива вибрации, где значением уровня шума является амплитудно-частотная характеристика выходной вибрации флюгерного датчика;
определение того, превышает ли текущая работа флюгерного датчика порог вибрации, исходя из вычисленного уровня шума массива вибрации;
выдача выходного сигнала неисправности при определении превышения порога вибрации во время работы флюгерного датчика;
выдача выходного сигнала о прохождении тестирования при определении непревышения порога вибрации во время работы флюгерного датчика.
2. Автоматизированный способ обнаружения ухудшения рабочих характеристик датчика в устройстве для измерения угла потока текучей среды, включающий следующие этапы:
отслеживание вибрационных характеристик устройства для измерения угла потока текучей среды процессором компьютера; и
определение наличия физических повреждений устройства для измерения угла потока текучей среды, исходя из упомянутых вибрационных характеристик устройства для измерения угла потока текучей среды, полученных посредством процессора компьютера, исходя из отслеживаемых вибрационных характеристик устройства для измерения угла потока текучей среды.
3. Способ по п. 2, отличающийся тем, что устройство для измерения угла потока устанавливают на воздушное судно и снимают с него.
4. Способ по п. 3, отличающийся тем, что устройство для измерения угла потока обладает функцией определения угла потока текучей среды относительно платформы носителя.
5. Способ по п. 2, отличающийся тем, что устройство для измерения угла потока устанавливается на плавучее средство и снимается с него.
6. Способ по п. 2, отличающийся тем, что дополнительно включает этап ввода данных о платформе в режиме реального времени из устройства для измерения угла потока текучей среды в процессор компьютера для проверки нахождения данных о платформе, полученных в режиме реального времени, в предопределенных пределах.
7. Способ по п. 6, отличающийся тем, что дополнительно включает этапы считывания в режиме реального времени угла флюгерного датчика устройства для измерения угла потока текучей среды и запоминания в памяти считанного значения угла флюгерного датчика в режиме реального времени.
8. Способ по п. 7, отличающийся тем, что дополнительно включает этап вычисления средних значений посредством процессора компьютера параметров окружающей среды платформы, таких как воздушная скорость, высота над уровнем моря и температура, предназначенных для формирования массива данных о скорости устройством для измерения угла потока текучей среды в режиме реального времени.
9. Способ по п. 8, отличающийся тем, что дополнительно включает этап поиска в памяти посредством процессора компьютера соответствующих значений коэффициентов фильтра углов и порога вибрации, основанных на вычисленных средних значениях текущих данных о платформе.
10. Способ по п. 9, отличающийся тем, что дополнительно включает этап вычисления массива вибрации посредством процессора компьютера с применением коэффициентов фильтра углов для фильтрации массива данных углов флюгерного датчика, полученных от устройства для измерения угла потока текучей среды.
11. Способ по п. 10, отличающийся тем, что дополнительно включает этап вычисления значения уровня шума процессором компьютера для вычисленного массива вибрации, при этом значение уровня является амплитудно-частотной характеристикой выходной вибрации флюгерного датчика.
12. Способ по п. 11, отличающийся тем, что дополнительно включает этап определения с помощью процессора компьютера того, превышает ли текущая работа флюгерного датчика устройства углового измерения по мере его движения в потоке текучей среды к превышению порога вибрации, исходя из вычисленного уровня шума массива вибрации.
13. Способ по п. 12, отличающийся тем, что дополнительно включает осуществляемый процессором компьютера этап индикации условия повреждения устройства для измерения угла потока текучей среды в случае определения процессором компьютера того, превышает ли текущая работа флюгерного датчика порог вибрации.
14. Система для обнаружения ухудшения рабочих характеристик датчика в устройстве для измерения угла потока текучей среды, которая использует компьютерный программный продукт, содержащий машиночитаемый носитель с хранимой на нем управляющей логикой, при этом упомянутая управляющая логика включает машиночитаемые программные средства, приводящие к отслеживанию компьютером вибрационных характеристик устройства для измерения угла потока текучей среды и обнаружения факта физического повреждения устройства для измерения угла потока текучей среды, исходя из упомянутых вибрационных характеристик устройства для измерения угла потока текучей среды, полученных на основе отслеживаемых вибрационных характеристик устройства для измерения угла потока текучей среды.
15. Система по п. 14, отличающаяся тем, что упомянутая управляющая логика дополнительно приводит к осуществлению упомянутыми машиночитаемыми программными средствами считывания упомянутым компьютером в реальном времени угла флюгерного датчика в устройстве для измерения угла потока текучей среды и сохранения считанного в реальном времени угла флюгерного датчика в памяти.
16. Система по п. 15, отличающаяся тем, что упомянутая управляющая логика дополнительно приводит к вычислению упомянутыми машиночитаемыми программными средствами средних значений параметров окружающей среды платформы в реальном времени для устройства измерения угла потока текучей среды, к которым могут относиться воздушная скорость, высота и температура, для формирования массива данных о скорости.
17. Система по п. 16, отличающаяся тем, что упомянутая управляющая логика дополнительно приводит к осуществлению упомянутыми машиночитаемыми программными средствами поиск в памяти соответствующих значений коэффициента фильтров углов и порога вибрации, исходя из вычисленных средних значений текущих данных о платформе.
18. Система по п. 17, отличающаяся тем, что упомянутая управляющая логика дополнительно приводит к вычислению упомянутыми машиночитаемыми программными средствами значений массива вибрации, используя коэффициенты фильтра углов для фильтрации угла флюгерного датчика устройства для измерения угла потока текучей среды, с применением вычисленного массива вибраций для устройства измерения угла потока текучей среды.
19. Система по п. 18, отличающаяся тем, что упомянутая управляющая логика дополнительно приводит к определению упомянутыми машиночитаемыми программными средствами того, превышает ли текущая работа флюгерного датчика в устройстве углового измерения по мере его движения в потоке текучей среды порог вибрации, исходя из вычисленного уровня шума массива вибрации.
20. Система по п. 19, отличающаяся тем, что упомянутая управляющая логика дополнительно приводит к осуществляемой машиночитаемыми программными средствами индикации условия повреждения устройства для измерения угла потока текучей среды при определении того, превышает ли текущая работа флюгерного датчика порог вибрации.
21. Система по п. 14, отличающаяся тем, что устройство для измерения угла потока текучей среды устанавливается и снимается с платформы носителя.
22. Система по п. 14, отличающаяся тем, что платформой носителя является воздушное судно.
23. Система по п. 14, отличающаяся тем, что платформой носителя является плавающее средство.
24. Система по п. 14, отличающаяся тем, что платформа носителя находится в стационарном положении.
| US 5299455 A 05.04.1994 | |||
| US 2008163936 A1 10.07.2008 | |||
| СПОСОБ ГРАДУИРОВКИ ДАТЧИКА АЭРОДИНАМИЧЕСКОГО УГЛА ЛЕТАТЕЛЬНОГО АППАРАТА | 2004 |
|
RU2277698C1 |

