Изобретение относится к авиационной технике, в частности к способам градуировки датчиков аэродинамических углов летательного аппарата (ЛА). Оно может быть использовано в процессе летных испытаний новых и модернизируемых летательных аппаратов.
Определим используемую ниже терминологию. Под скоростью ЛА понимают вектор скорости  начала О его связанной системы координат (СК) относительно воздушной среды [Динамика летательных аппаратов в атмосфере. Термины, определения и обозначения. ГОСТ 20058-80. - М.: Государственный комитет СССР по стандартам, 1981. с.5, 11]. В качестве компонентов скорости для индикации летчику используют углы ориентации скорости ЛА: углы атаки и скольжения ЛА.
начала О его связанной системы координат (СК) относительно воздушной среды [Динамика летательных аппаратов в атмосфере. Термины, определения и обозначения. ГОСТ 20058-80. - М.: Государственный комитет СССР по стандартам, 1981. с.5, 11]. В качестве компонентов скорости для индикации летчику используют углы ориентации скорости ЛА: углы атаки и скольжения ЛА.
Под воздушной скоростью V ЛА понимают модуль  вектора скорости [там же, с. 12] ЛА. Углы атаки α и скольжения β ЛА определяют направление скорости в скоростной СК ЛА [там же, с.8].
вектора скорости [там же, с. 12] ЛА. Углы атаки α и скольжения β ЛА определяют направление скорости в скоростной СК ЛА [там же, с.8].
Три составляющие VX, VY и VZ представляют проекции скорости ЛА на оси ОХ, OY, OZ связанной СК и также определяют модуль и направление вектора скорости ЛА.
Под угловой ориентацией ЛА относительно земли понимают значения углов тангажа ϑ, крена γ и рыскания ψ [там же, с.9], либо матрицу направляющих косинусов [там же, с.43] между осями ОХ, OY, OZ связанной СК и осями OXg, OYg, OZg нормальной СК [там же, с.4]. Ось OXg, как правило, направляют на географический Северный полюс. Угол курса ψк отличается от угла рыскания ψ противоположным направлением положительного отсчета.
Под земной скоростью  ЛА понимают вектор скорости начала О его связанной СК относительно земли [там же, с. 12]. Под путевой скоростью
ЛА понимают вектор скорости начала О его связанной СК относительно земли [там же, с. 12]. Под путевой скоростью  ЛА понимают проекцию земной скорости ЛА на горизонтальную плоскость OZgXg нормальной СК [там же, с.12]. Под углом наклона траектории θ понимают угол между направлением земной скорости
ЛА понимают проекцию земной скорости ЛА на горизонтальную плоскость OZgXg нормальной СК [там же, с.12]. Под углом наклона траектории θ понимают угол между направлением земной скорости  ЛА и горизонтальной плоскостью OZgXg нормальной СК [там же, с.10]. Под углом пути Ψ ЛА понимают угол между осью OXg нормальной СК и направлением путевой скорости
ЛА и горизонтальной плоскостью OZgXg нормальной СК [там же, с.10]. Под углом пути Ψ ЛА понимают угол между осью OXg нормальной СК и направлением путевой скорости  ЛА [там же, с.10]. Угол пути Ψк отличается от угла пути Ψ противоположным направлением положительного отсчета.
ЛА [там же, с.10]. Угол пути Ψк отличается от угла пути Ψ противоположным направлением положительного отсчета.
Под скоростью ветра понимают скорость  среды, не возмущенной ЛА, относительно земли [там же, с.12].
среды, не возмущенной ЛА, относительно земли [там же, с.12].
Датчиком аэродинамического угла (ДАУ) называется устройство для выработки сигналов измерительной информации о текущих значениях аэродинамических углов, соответствующих местным углам атаки α и скольжения β [Оборудование самолетов и вертолетов пилотажно-навигационное бортовое. Термины и определения. ГОСТ 22837-77, стр.5]. ДАУ бывают, как правило, флюгерного типа.
При горизонтальном расположении оси вращения флюгарки ДАУ фиксируется аэродинамический угол атаки αм ДАУ ДАУ в месте его установки, т.е. местный угол ориентации скорости набегающего потока в вертикальной плоскости симметрии ЛА. С целью повышения точности измерения угла атаки α ЛА в ДАУ угла атаки часто применяют две флюгарки, устанавливаемые симметрично на левой и правой боковых поверхностях фюзеляжа. В этом случае под местным аэродинамическим углом атаки αм ДАУ понимают среднеарифметическое значение местных углов атаки αм л ДАУ и αм п ДАУ, зафиксированных левой и правой флюгарками соответственно.
При вертикальном расположении оси вращения флюгарки ДАУ фиксируется аэродинамический угол скольжения βм ДАУ ДАУ в месте его установки, т.е. также местный угол ориентации скорости набегающего потока относительно продольной плоскости симметрии ЛА.
Местные углы атаки αм ДАУ и скольжения βм ДАУ ДАУ могут отличаться примерно в 1,5...2,0 раза от углов атаки α и скольжения β ЛА, поскольку воздушная среда вблизи фюзеляжа возмущена самим ЛА [Харин Е.А., Цветков П.М., Волков В.К. и др. Летные испытания систем пилотажно-навигационного оборудования. - М.: Машиностроение, 1986, с.87]. Поэтому для каждого типа ЛА после установки ДАУ необходимо выполнить их градуировку, т.е. получить градуировочные характеристики ДАУ. Под градуировочной характеристикой средства измерения (градуировочной характеристикой) понимают зависимость ξвых=f(ξвх) между значениями величины ξ на входе ξвх и выходе ξвых средства измерения, полученную экспериментально [РМГ 29-99 "Рекомендации по межгосударственной стандартизации. Государственная система обеспечения единства измерений. Метрология. Основные термины и определения"]. Градуировочная характеристика может быть выражена в виде формулы, графика или таблицы.
Известен способ градуировки датчика аэродинамического угла (угла атаки или угла скольжения) ЛА [Пашковский И.М., Леонов В.А., Поплавский Б.К. Летные испытания самолетов и обработка результатов испытаний: Учебное пособие для студентов авиационных специальностей вузов. - М.: Машиностроение, 1985, с.151-152], основанный на использовании установленного на носовой штанге перед фюзеляжем ЛА (т.е. вынесенного в зону невозмущенного набегающего потока) устройства, называемого также датчиком углов атаки и скольжения (ДУАС), градуировочные характеристиками которого известны. Способ заключается в том, что летательному аппарату сообщают отклонения по соответствующему аэродинамическому углу относительно его скорости  , измеряют значения местного аэродинамического угла с помощью датчика аэродинамического угла и с помощью установленного на носовой штанге ДУАС с заданной градуировочной характеристикой, по измеренным с помощью ДУАС значениям местного аэродинамического угла и градуировочной характеристике ДУАС определяют аэродинамический угол ЛА и сопоставляют его с измеренным с помощью датчика аэродинамического угла местным аэродинамическим углом, на основе этих сопоставлений формируют градуировочную характеристику датчика аэродинамического угла.
, измеряют значения местного аэродинамического угла с помощью датчика аэродинамического угла и с помощью установленного на носовой штанге ДУАС с заданной градуировочной характеристикой, по измеренным с помощью ДУАС значениям местного аэродинамического угла и градуировочной характеристике ДУАС определяют аэродинамический угол ЛА и сопоставляют его с измеренным с помощью датчика аэродинамического угла местным аэродинамическим углом, на основе этих сопоставлений формируют градуировочную характеристику датчика аэродинамического угла.
Недостатком данного способа градуировки ДАУ атаки и скольжения летательного аппарата с использованием ДУАС является необходимость
- специальных конструктивных доработок ЛА по установке обтекателя для носовой штанги ДУАС и демонтажа обтекателя и ДУАС после проведения градуировочных работ;
- тарировок и юстировок ДУАС;
- работ по определению характеристик изгиба фюзеляжа и штанги при больших перегрузках, возникающих при больших углах атаки ЛА, для определения поправок к показаниям ДУАС;
- численного сглаженного дифференцирования угловой скорости вращения ωZ ЛА относительно оси OZ связанной СК ЛА. [Пашковский И.М., Леонов В.А., Поплавский Б.К. Летные испытания самолетов и обработка результатов испытаний. - М.: Машиностроение, 1985, с.152].
Прототипом изобретения является следующий способ градуировки датчика аэродинамического угла атаки ЛА без необходимости использования ДУАС [Харин Е.А., Цветков П.М., Волков В.К. и др. Летные испытания систем пилотажно-навигационного оборудования. - М.: Машиностроение, 1986, с.87-88, 67-68], в котором ЛА в некоторые моменты времени сообщают угловое отклонение относительно его скорости по аэродинамическому углу, измеряют земную скорость  , с помощью датчика аэродинамического угла измеряют значения местного аэродинамического угла, рассчитывают значение аэродинамического угла как величину угла между земной скоростью и проекцией продольной оси ЛА на контрольную плоскость и сопоставляют полученные в одни и те же моменты времени значения расчетных углов и местных аэродинамических углов, на основе этих сопоставлений формируют градуировочную характеристику аэродинамического угла ЛА от угла, определенного с помощью датчика аэродинамического угла местного аэродинамического угла.
, с помощью датчика аэродинамического угла измеряют значения местного аэродинамического угла, рассчитывают значение аэродинамического угла как величину угла между земной скоростью и проекцией продольной оси ЛА на контрольную плоскость и сопоставляют полученные в одни и те же моменты времени значения расчетных углов и местных аэродинамических углов, на основе этих сопоставлений формируют градуировочную характеристику аэродинамического угла ЛА от угла, определенного с помощью датчика аэродинамического угла местного аэродинамического угла.
Недостатком описанного способа градуировки ДАУ применительно к углу атаки α ЛА является погрешность Δα определения угла атаки ЛА, вызванная следующими обстоятельствами. Угол атаки α ЛА лежит в плоскости симметрии ЛА [Динамика летательных аппаратов в атмосфере. Термины, определения и обозначения. Государственный стандарт Союза ССР ГОСТ 20058-80. - М.: Государственный комитет СССР по стандартам, 1981. с.8]. Расчетный же угол атаки αp=ϑ-θ не имеет геометрического смысла, он расположен в плоскости симметрии ЛА только при одновременном равенстве нулю средней скорости  ветра, углов крена γ и скольжения β ЛА. Крен и скольжение ЛА контролируются летчиком и могут быть выдержаны на градуировочном режиме достаточно малыми, средняя же скорость ветра определяется текущим состоянием атмосферы и может достигать десятков метров в секунду. При этом угол наклона траектории θ полета лежит в местной вертикальной относительно земли плоскости, содержащей вектор земной скорости ЛА, а угол тангажа ϑ - в местной вертикальной относительно земли плоскости, содержащей продольную ось ОХ связанной СК и вектор скорости ЛА. Угол между указанными плоскостями в местной горизонтальной относительно земли плоскости называют углом сноса, величина которого может изменяться от нуля (при отсутствии ветра) до 10°...15°. Следовательно, в описанном способе расчетный угол атаки αp при наличии ветра в атмосфере не имеет физического смысла и поэтому не может определять угол атаки ЛА. Поэтому получить правильную градуировочную характеристику ДАУ указанным способом при наличии ветра невозможно.
ветра, углов крена γ и скольжения β ЛА. Крен и скольжение ЛА контролируются летчиком и могут быть выдержаны на градуировочном режиме достаточно малыми, средняя же скорость ветра определяется текущим состоянием атмосферы и может достигать десятков метров в секунду. При этом угол наклона траектории θ полета лежит в местной вертикальной относительно земли плоскости, содержащей вектор земной скорости ЛА, а угол тангажа ϑ - в местной вертикальной относительно земли плоскости, содержащей продольную ось ОХ связанной СК и вектор скорости ЛА. Угол между указанными плоскостями в местной горизонтальной относительно земли плоскости называют углом сноса, величина которого может изменяться от нуля (при отсутствии ветра) до 10°...15°. Следовательно, в описанном способе расчетный угол атаки αp при наличии ветра в атмосфере не имеет физического смысла и поэтому не может определять угол атаки ЛА. Поэтому получить правильную градуировочную характеристику ДАУ указанным способом при наличии ветра невозможно.
Кроме того, даже в частном случае совпадения рассмотренных плоскостей, когда курс ψк ЛА совпадает или противоположен направлению средней скорости  ветра, угол наклона траектории θ определяет направление земной скорости ЛА, а не направление его скорости относительно воздушной среды, которая и определяет угол атаки α ЛА. Угол Δα в вертикальной плоскости между скоростью и земной скоростью ЛА определяет погрешность Δα=αр-α расчетного значения αp угла атаки ЛА для рассматриваемого случая. Эту погрешность можно оценить из выражения
ветра, угол наклона траектории θ определяет направление земной скорости ЛА, а не направление его скорости относительно воздушной среды, которая и определяет угол атаки α ЛА. Угол Δα в вертикальной плоскости между скоростью и земной скоростью ЛА определяет погрешность Δα=αр-α расчетного значения αp угла атаки ЛА для рассматриваемого случая. Эту погрешность можно оценить из выражения 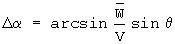 (фиг.1). В частности, при значениях
(фиг.1). В частности, при значениях  ; V=200 м/с и θ=10° указанная погрешность составляет недопустимо большую величину |Δα|≈0.5°. Модуль
; V=200 м/с и θ=10° указанная погрешность составляет недопустимо большую величину |Δα|≈0.5°. Модуль  средней скорости ветра и угол наклона θ траектории полета могут достигать и существенно больших значений, поэтому применение описанного способа градуировки ДАУ угла атаки ЛА при наличии ветра приводит к недопустимо большим погрешностям определения градуировочной характеристики ДАУ угла атаки ЛА.
средней скорости ветра и угол наклона θ траектории полета могут достигать и существенно больших значений, поэтому применение описанного способа градуировки ДАУ угла атаки ЛА при наличии ветра приводит к недопустимо большим погрешностям определения градуировочной характеристики ДАУ угла атаки ЛА.
В отношении угла скольжения β этот способ имеет аналогичный недостаток: недопустимую погрешность Δβ определения угла скольжения ЛА, также проявляющуюся при наличии ветра в атмосфере. Угол скольжения β ЛА лежит в плоскости, содержащей вектор скорости ЛА и ось OZ связанной СК ЛА [там же, стр.8]. Расчетный угол скольжения βp=Ψк-ψк лежит в местной горизонтальной от земли плоскости и совпадает с плоскостью, в которой лежит угол скольжения только при нулевом крене γ ЛА.
Для наглядности рассмотрим ситуацию нулевого крена ЛА при наличии ветра в атмосфере на горизонтальном градуировочном режиме полета. Путевой угол Ψк определяет азимутальное направление земной скорости ЛА, а не азимутальное направление его скорости относительно воздушной среды, которая и определяет угол скольжения β ЛА. В горизонтальной плоскости угол отклонения Δβ земной скорости относительно скорости ЛА определяет погрешность Δβ=βp-β расчетного значения βp угла скольжения ЛА для рассматриваемого случая. Эту погрешность можно оценить из выражения (фиг.2)

В частности, если вектор средней скорости ветра нормален вектору скорости ЛА, то справедливо  ,
,  . С учетом малости отношения
. С учетом малости отношения  из выражения для погрешности |Δβ| следует
из выражения для погрешности |Δβ| следует 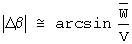 . При значениях ; V=200 м/с указанная погрешность составляет недопустимо большую величину |Δβ|≈2,9°. Скорость ветра может достигать и существенно больших значений, поэтому применение описанного способа градуировки ДАУ угла скольжения ЛА при наличии ветра приводит к недопустимо большим погрешностям определения градуировочной характеристики ДАУ угла скольжения ЛА.
. При значениях ; V=200 м/с указанная погрешность составляет недопустимо большую величину |Δβ|≈2,9°. Скорость ветра может достигать и существенно больших значений, поэтому применение описанного способа градуировки ДАУ угла скольжения ЛА при наличии ветра приводит к недопустимо большим погрешностям определения градуировочной характеристики ДАУ угла скольжения ЛА.
Задачей изобретения является повышение точности определения градуировочных характеристик ДАУ без использования дополнительного устройства на носовой штанге и с учетом средней скорости ветра.
Задача решается с помощью способа градуировки датчика аэродинамического угла летательного аппарата, в котором на градуировочном режиме летательному аппарату сообщают отклонения по аэродинамическому углу относительно его скорости, измеряют значения местного аэродинамического угла датчиком аэродинамического угла, угол отклонения продольной связанной оси летательного аппарата в контрольной относительно земли плоскости и его земную скорость, отличающегося тем, что до или после градуировочного режима выполняют как минимум один зондирующий режим полета с целью определения средней скорости ветра, на градуировочном режиме измеряют угловую ориентацию летательного аппарата относительно земли, после завершения зондирующего и градуировочного режимов вычисляют скорость летательного аппарата как разность его земной скорости и средней скорости ветра и определяют градуировочную характеристику сопоставлением для одних и тех же моментов времени измеренного местного угла ориентации скорости набегающего потока с углом ориентации вычисленной скорости летательного аппарата.
Во время зондирующего режима совершают горизонтальный полет без скольжения, на котором измеряют воздушную скорость, земную скорость и угловую ориентацию летательного аппарата относительно земли, и по результатам этих измерений определяют среднюю скорость ветра.
Один зондирующий режим полета может быть выполнен до градуировочного режима. Дополнительно после градуировочного режима выполняют второй зондирующий режим полета, а среднюю скорость ветра на градуировочном режиме вычисляют по средним скоростям ветра, определенным на зондирующих режимах.
В другом варианте выполняют два зондирующих режима горизонтального полета без скольжения с одинаковой воздушной скоростью и фиксированными, отличными для каждого из режимов курсами, на которых измеряют земную скорость и угловую ориентацию летательного аппарата относительно земли, и по результатам этих измерений определяют среднюю скорость ветра. На зондирующих режимах полета курсы летательного аппарата направлены противоположно. До градуировочного режима может быть выполнена одна пара зондирующих режимов полета, а после градуировочного режима дополнительно выполняют вторую пару зондирующих режимов полета, среднюю скорость ветра на градуировочном режиме вычисляют по средним скоростям ветра, определенным на зондирующих режимах.
Предлагаемое изобретение обеспечивает повышение точности определения градуировочных характеристик ДАУ углов атаки и скольжения ЛА без необходимости использования устройства на носовой штанге (ДУАС) путем получения расчетных значений углов атаки и скольжения с учетом средней скорости ветра.
Изобретение поясняется чертежами.
На фиг.1 приведена схема, иллюстрирующая причины возникновения погрешности Δα определения расчетного значения αp угла атаки ЛА в прототипе изобретения.
На фиг.2 приведена схема, иллюстрирующая причины возникновения погрешности Δβ определения расчетного значения βp угла атаки ЛА в прототипе изобретения.
Предлагаемый способ градуировки ДАУ ЛА заключается в следующем.
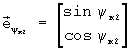
До или после градуировочного режима выполняют как минимум один зондирующий горизонтальный режим полета без скольжения (β≅0) с целью определения средней скорости ветра, на котором измеряют воздушную скорость Vj, земную скорость  и угловую ориентацию ψкj, ϑj, γj ЛА относительно земли в j-е моменты времени (j=1, 2,...), после чего вычисляют среднюю скорость ветра. В горизонтальном полете без скольжения направление скорости
и угловую ориентацию ψкj, ϑj, γj ЛА относительно земли в j-е моменты времени (j=1, 2,...), после чего вычисляют среднюю скорость ветра. В горизонтальном полете без скольжения направление скорости  ЛА совпадает с его курсом ψк j и, тем самым, известна не только воздушная скорость Vj, но и вектор скорости . Поэтому вычисляют скорость ветра
ЛА совпадает с его курсом ψк j и, тем самым, известна не только воздушная скорость Vj, но и вектор скорости . Поэтому вычисляют скорость ветра 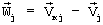 , затем по выборке
, затем по выборке  измерений на зондирующем режиме вычисляют среднее значение скорости ветра.
измерений на зондирующем режиме вычисляют среднее значение скорости ветра.
На градуировочном режиме летательному аппарату сообщают отклонения по соответствующему аэродинамическому углу (углу атаки или углу скольжения ЛА) относительно его скорости, датчиком аэродинамического угла в i-е (i=1, 2,...) моменты времени измеряют значения местного аэродинамического угла (угла атаки αм ДАУ i или угла скольжения βм ДАУ i), в эти же моменты времени измеряют угловую ориентацию ψк i, ϑi, γi ЛА относительно земли и его земную скорость .
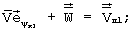
После завершения зондирующего и градуировочного режимов вычисляют скорость  ЛА как разность его земной скорости и средней скорости ветра в скоростной системе координат ЛА, т.е.
ЛА как разность его земной скорости и средней скорости ветра в скоростной системе координат ЛА, т.е. 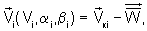 и определяют градуировочную характеристику α=ƒ(αм ДАУ) (β=ƒ(βм ДАУС)) ДАУ сопоставлением для одних и тех же моментов времени измеренного местного угла ориентации скорости набегающего потока (угла атаки αм ДАУ i или скольжения βм ДАУ i) с углом ориентации вычисленной скорости ЛА (углом атаки αi или скольжения βi ЛА).
и определяют градуировочную характеристику α=ƒ(αм ДАУ) (β=ƒ(βм ДАУС)) ДАУ сопоставлением для одних и тех же моментов времени измеренного местного угла ориентации скорости набегающего потока (угла атаки αм ДАУ i или скольжения βм ДАУ i) с углом ориентации вычисленной скорости ЛА (углом атаки αi или скольжения βi ЛА).
Систематическая составляющая скорости ветра (т.е. средняя скорость ветра) изменяется по высоте полета, расстоянию и времени [Хиврич И.Г., Миронов Н.Ф., Белкин A.M. Воздушная навигация. Учебное пособие для вузов. - М.: Транспорт, 1984, с.78-81]. Поэтому определение средней скорости ветра на зондирующих режимах, выполняемых только до или только после градуировочного режима полета, может приводить к погрешности определения средней скорости ветра на градуировочном режиме полета, а значит, и погрешности определения градуировочных характеристик ДАУ ЛА.
Поэтому первый зондирующий режим выполняют до градуировочного режима, а после градуировочного режима выполняют второй зондирующий режим, среднюю скорость ветра на градуировочном режиме вычисляют по средним скоростям ветра, определенным на зондирующих режимах (в качестве средней скорости ветра принимают значение, среднее для зондирующих режимов).
Для исключения влияния на градуировочную характеристику ДАУ систематической погрешности измерения воздушной скорости V ЛА бортовой системой воздушных сигналов (СВС), которая может приводить к соответствующей погрешности вычисления средней скорости ветра, до или после градуировочного режима выполняют как минимум одну пару зондирующих режимов горизонтального полета без скольжения с одинаковой воздушной скоростью V и фиксированными отличающимися на каждом из режимов курсами ψк1, ψк2, на которых также, как и было описано выше, измеряют земную скорость и угловую ориентацию ψкj ϑj, γj ЛА относительно земли (j=1, 2,...) и вычисляют среднюю скорость ветра, учитывая следующие соображения. В горизонтальном полете без скольжения направление скорости ЛА совпадает с его курсом ψк и, тем самым, известна не только воздушная скорость V, но и вектор скорости . Для первого зондирующего режима справедливо

Аналогично для второго зондирующего режима

где  ,
,  - единичные векторы, определяющие фиксированные курсы ψк1, ψк2 ЛА на первом и втором зондирующих режимах соответственно.
- единичные векторы, определяющие фиксированные курсы ψк1, ψк2 ЛА на первом и втором зондирующих режимах соответственно.
Усредняя соотношения (1), (2) по выборкам j, k, получим
Откуда найдем

Здесь верхний правый индекс "T" обозначает транспонирование матрицы  [Корн Г., Корн Т. Справочник по математике для научных работников и инженеров. М.: Наука. Гл. ред. физ.-мат. лит. 1984, стр.396]. Произведение
[Корн Г., Корн Т. Справочник по математике для научных работников и инженеров. М.: Наука. Гл. ред. физ.-мат. лит. 1984, стр.396]. Произведение  определяет квадрат расстояния re между концами единичных векторов
определяет квадрат расстояния re между концами единичных векторов  и
и  при совмещении их начал. Погрешность определения средней скорости ветра согласно зависимости (4) пропорциональна погрешности определения средней воздушной скорости
при совмещении их начал. Погрешность определения средней скорости ветра согласно зависимости (4) пропорциональна погрешности определения средней воздушной скорости  , которая, в свою очередь, согласно выражению (3) зависит от величины расстояния re. Из выражения (3) видно, что для осуществления предлагаемого способа необходимо, чтобы курсы ψк1 и ψк2 на зондирующих режимах отличались.
, которая, в свою очередь, согласно выражению (3) зависит от величины расстояния re. Из выражения (3) видно, что для осуществления предлагаемого способа необходимо, чтобы курсы ψк1 и ψк2 на зондирующих режимах отличались.
Согласно выражениям (3), (4) минимальная погрешность вычисления средней скорости ветра, а следовательно, и градуировочной характеристики ДАУ, достигается, если курсы ψк1 и ψк2 на зондирующих режимах полета направлены противоположно. При этом выполняется условие  и согласно выражению (4) справедливо
и согласно выражению (4) справедливо

т.е. погрешности определения средней воздушной скорости не влияют на погрешности определения средней скорости ветра, а следовательно, и не вносят погрешности в определение градуировочной характеристики ДАУ. Это означает, что минимальная погрешность достигается, когда в паре зондирующих режимов полета курсы ЛА направлены противоположно.
Опять же, т.к. средняя скорость ветра изменяется по высоте полета, расстоянию и времени, одну пару зондирующих режимов полета выполняют до градуировочного режима, после градуировочного режима выполняют вторую пару зондирующих режимов полета, а среднюю скорость ветра на градуировочном режиме вычисляют по средним скоростям ветра, определенным на зондирующих режимах.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ АЭРОДИНАМИЧЕСКОГО УГЛА ЛЕТАТЕЛЬНОГО АППАРАТА | 2007 |
|
RU2341775C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОМПОНЕНТА СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2006 |
|
RU2331892C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОМПОНЕНТА СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2001 |
|
RU2192015C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВОЗДУШНЫХ ПАРАМЕТРОВ В ЛЕТНЫХ ИСПЫТАНИЯХ ЛЕТАТЕЛЬНОГО АППАРАТА НА БОЛЬШИХ УГЛАХ АТАКИ | 2009 |
|
RU2396569C1 |
| КОМПЛЕКСНАЯ ИНФОРМАЦИОННАЯ СИСТЕМА | 2004 |
|
RU2263280C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ВЕТРА НА БОРТУ ЛЕТАТЕЛЬНОГО АППАРАТА И КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2461801C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЫСОТЫ ПОЛЕТА ЛЕТАТЕЛЬНОГО АППАРАТА | 1992 |
|
RU2040443C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ВЕТРА НА БОРТУ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ | 2011 |
|
RU2486527C2 |
| Способ определения углов атаки и скольжения беспилотного летательного аппарата | 2022 |
|
RU2792261C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТЕЙ ИЗМЕРЕНИЯ УГЛОВ АТАКИ И СКОЛЬЖЕНИЯ | 2014 |
|
RU2579551C1 |

Изобретение относится к измерительной технике и может быть использовано для градуировки датчиков аэродинамического угла летательных аппаратов. Технический результат - повышение точности определения градуировочных характеристик. Для достижения данного результата измеряют значения местного аэродинамического угла датчиком аэродинамического угла, угол отклонения продольной связанной оси летательного аппарата в контрольной относительно земли плоскости и его земную скорость. При этом после градуировочного режима выполняют как минимум один зондирующий режим полета с целью определения средней скорости ветра. На градуировочном режиме измеряют угловую ориентацию летательного аппарата относительно земли. После завершения зондирующего и градуировочного режимов вычисляют скорость летательного аппарата как разность его земной скорости и средней скорости ветра и определяют градуировочную характеристику сопоставлением для одних и тех же моментов времени измеренного местного угла ориентации скорости набегающего потока с углом ориентации вычисленной скорости летательного аппарата. 5 з.п. ф-лы, 2 ил.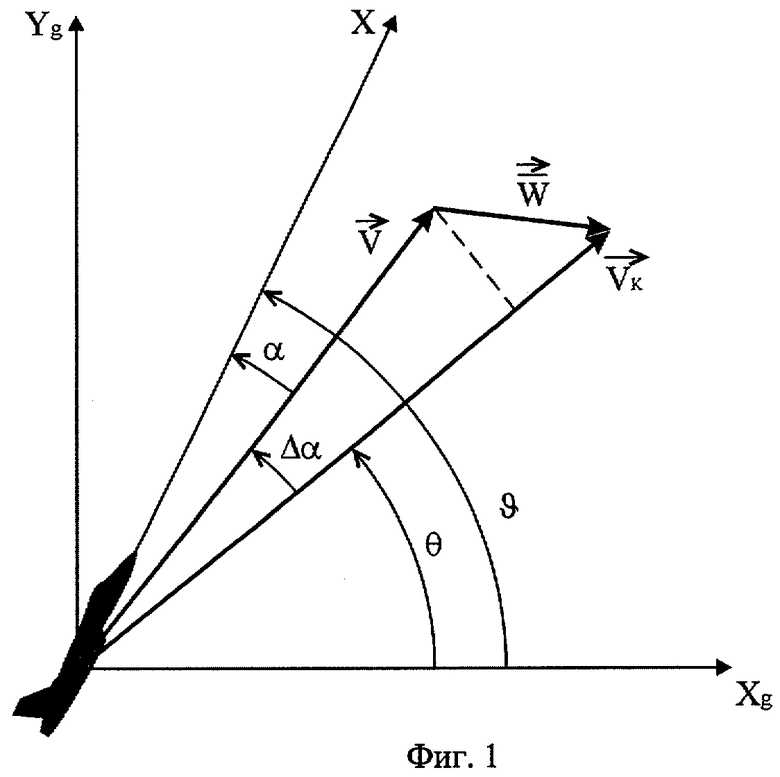
| Харин Е.А., Цветков П.М., Волков В.К | |||
| и др | |||
| Летные испытания систем пилотажно-навигационного оборудования | |||
| - М.: Машиностроение, 1986, с.87-88, 67-68 | |||
| Пашковский И.М., Леонов В.А., Поплавский Б.К | |||
| Летные испытания самолетов и обработка результатов испытаний | |||
| - М.: Машиностроение, 1985, с.152 | |||
| СПОСОБ ПОДГОТОВКИ СТАРТОВОЙ ПЛОЩАДКИ ДЛЯ ЗАПУСКА РАКЕТЫ КОСМИЧЕСКОГО НАЗНАЧЕНИЯ И НАЗЕМНОЕ ОБОРУДОВАНИЕ ДЛЯ ОСУЩЕСТВЛЕНИЯ ЗАПУСКА | 1994 |
|
RU2094337C1 |
| Способ лечения хронического гиперпластического ларингита с дискератозом, гиперкератозом слизистой оболочки гортани с помощью холодноплазменной абляции | 2016 |
|
RU2658479C2 |
| US 4834324 A, 30.05.1989 | |||
| СПОСОБ ЭКСТРЕННОЙ ДОСТАВКИ СРЕДСТВ СПАСЕНИЯ ОБЪЕКТАМ СПАСЕНИЯ, ПОПАВШИМ В ЭКСТРЕМАЛЬНЫЕ УСЛОВИЯ И ТЕРПЯЩИМ БЕДСТВИЕ В УДАЛЕННЫХ БЕЗЛЮДНЫХ РАЙОНАХ ЗЕМНОГО ШАРА С НЕТОЧНО ИЗВЕСТНЫМИ КООРДИНАТАМИ И АЭРОБАЛЛИСТИЧЕСКАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2076759C1 |

