Область техники
Изобретение относится к способу оптимизации регулирования силовой установки со свободной турбиной, выполненной с возможностью подачи мощности летательному аппарату, а также регулирующему приводу для осуществления этого способа.
Изобретение относится к силовым установкам со свободной турбиной, оборудующим летательные аппараты, например самолеты и вертолеты, выполненным с возможностью подачи мощности. Эти установки могут подавать, в частности, мощность на оборудование (генераторы переменного тока, насосы, нагрузочные компрессоры, кондиционеры) летательного аппарата, прямо и/или косвенно посредством редукторных коробок передач мощности с многочисленными выходами.
Эти силовые установки содержат вспомогательные силовые установки, сокращенно ВСУ (или APU в английской терминологии -Auxiliary Power Unit), и основные силовые установки, сокращенно GPP. ВСУ предназначены для запуска основных двигателей летательных аппаратов и/или для подачи нетяговой энергии (пневматической, электрической и/или гидравлической) на земле.
Некоторые надежные ВСУ могут также быть задействованы в полете в случае неисправности двигателя, чтобы попытаться произвести его повторный запуск и/или для подачи энергии оборудованию.
Основные силовые установки относятся к классу двигателей, так как они отвечают стандартам безопасности основных двигателей, особенно в случае отказа двигателя. Установка такого типа основана на ВСУ, выполненной надежной по своим материалам и размерам, чтобы получить маркировку класса двигателей.
Силовая установка обычно включает в себя блок компрессоров/камер сгорания/турбин, образующих газогенератор. После смешивания воздуха/топлива и сгорания горячие газы расширяются в ступенях турбины высокого давления (HP), которая частично передает произведенную тепловую мощность в ступени компрессора HP посредством вала высокого давления или каскада HP. Тепловая мощность выхлопных газов также приводит в движение свободную турбину (TL), которая в свою очередь механически передает мощность посредством вала низкого давления BP оборудованию (генераторам переменного тока, насосам, нагрузочному компрессору и т.д.) генератора мощности.
Уровень техники
Обычно система регулирования поставляет и дозирует количество топлива, впрыскиваемого в камеру сгорания газогенератора, чтобы адаптировать его с требуемым уровнем мощности. Скорость каскада HP адаптируется к этому впрыску после ускорения или замедления, чтобы достичь постоянного уровня скорости и подать тепловую мощность на каскад BP. Передаваемая на каскад BP мощность обеспечивает в таком случае требуемую мощность при постоянной требуемой скорости посредством электронного блока управления (ВЕС).
Регулирование впрыскивания топлива в силовой установке включает в себя, как известно, следующие этапы:
- создают давление топлива для его впрыскивания в камеру сгорания с соответствующим давлением;
- дозируют расход топлива в установленных пределах для того, чтобы адаптировать уровень мощности, подаваемой газогенератором, к требуемому уровню;
- измеряют и контролируют скорость ротора каскада HP, чтобы она оставалась в установленных рабочих пределах;
- измеряют и контролируют скорость ротора каскада BP;
- определяют заданное значение скорости каскада HP в зависимости от разницы между заданным значением скорости каскада BP и его измеренной скоростью, а также заданного значения расхода впрыскиваемого в камеру сгорания топлива в зависимости от разницы между определенным заданным значением скорости каскада HP и ее предварительно измеренным значением.
Скорость вращения каждого оборудования устанавливается путем предварительного выбора его скорости, близкой к его максимально допустимой скорости, при которой его способность подачи мощности является максимальной. При этих условиях вес и стоимость каждого оборудования минимизированы для постоянной работы на этой скорости. Кроме того, некоторое оборудование, такое как нагрузочный компрессор, должно быть способно обеспечивать изменяемый корректируемый расход, незначительный на земле и значительный в полете. Расход выражается в виде скорректированных значений, чтобы обеспечить возможность сравнения расходов независимо от условий окружающей среды для впуска воздуха. Для работы на протяжении всего полета предусмотрена переменная геометрия потока воздуха в нагрузочном компрессоре.
Оптимизация таких схем регулирования впрыскивания топлива осуществляется путем поддержания скоростей оборудования, приведенного в движение на скоростях, близких к максимальным скоростям каскада BP для подачи требуемых мощностей. В частности, изменение приводной скорости нагрузочного компрессора не используется. А только выбор переменной геометрии потока воздуха обуславливает громоздкость и высокую стоимость нагрузочного компрессора.
Предварительный выбор скорости турбины TL направлен, таким образом, только на достижение подачи максимальной мощности без оптимизации производительности в ходе подачи различных уровней мощности.
При этих условиях, в процессе переходных мощностей, система регулирования силовой установки реагирует, только когда обнаруживается недостаточная скорость каскада BP, являющаяся ниже скорости заданного значения для каскада BP. Отклонения скорости каскада BP в процессе переходных мощностей являются в этом случае значительными из-за повышенного времени реагирования контуров регулирования и низкой инерции вала BP относительно газогенератора с присоединенной турбиной. Фиксируются значительные изменения скорости, выходящие за пределы допустимых диапазонов, в частности отклонения выше максимальных скоростей при внезапном сбросе мощности или ниже минимальных скоростей в случае высокого потребления мощности.
Таким образом, при повышенных скоростях оборудование, приводимое в движение вместе, не в состоянии обеспечить требуемую мощность для каждого из них. В случае повышенной скорости средство управления мгновенно останавливает силовую установку в соответствии с ее сертификацией, и, таким образом, общая подача мощности больше не обеспечивается.
Раскрытие изобретения
Изобретение направлено на оптимизацию регулирования впрыскивания топлива для того, чтобы избежать упомянутых выше проблем. С этой целью приводные скорости оборудования адаптированы регулированием скорости турбины TL в зависимости от мощности.
Более конкретно объектом изобретения является способ оптимизации регулирования силовой установки со свободной турбиной, как описано выше, и выполненной с возможностью выдачи мощности оборудованию летательного аппарата. В данном способе скорость каскада BP изменяют для получения минимальной скорости каскада HP таким образом, чтобы мощность, подаваемая оборудованием, оставалась постоянной.
В соответствии с предпочтительным вариантом осуществления, поскольку мощности, подаваемые оборудованием, зависят от их приводной скорости каскада BP, заданное значение скорости каскада BP турбины TL зависит от максимального значения минимальных скоростей оборудования, позволяющего получить оптимизированным образом соответствующие требуемые мощности, и от положительного или нулевого приращения, добавленного к заданному значению скорости каскада BP, чтобы минимизировать скорость каскада HP для изоподачи мощности оборудования.
В частном случае непрерывное измерение мощности, подаваемой каждым оборудованием, позволяет обнаружить устойчивое функционирование потребления подаваемой мощности и в этом случае инициировать приращение.
Согласно предпочтительным вариантам приращение определяется расчетным путем, исходя из кривых производительности оборудования и свободной турбины или путем обнаружения изменения скорости каскада HP, при этом приращение применяют до тех пор, пока скорость каскада HP не станет минимальной.
В частности, для приращения, определенного расчетным путем для каждого оборудования, уровень тепловой мощности каскада HP передается на каскад BP, и для любых условий окружающей среды по температуре и давлению на входе силовой установки существует скорость вращения каскада BP, которая позволит выдавать на его валу максимальную механическую мощность.
Предпочтительно, поскольку мощность, подаваемая каждому оборудованию, поддерживается в пределах установленного производителем диапазона, скорость приведения в движение, прямого или косвенного, этого оборудования турбиной BP определяет объем мощности, который может подаваться в этих пределах. Подача такой мощности в зависимости от этого объема позволяет, таким образом, использовать лишь частичную мощность, которая избавляет от любого непроизводительного расхода и которая определяется между потребностью в требуемой мощности и уровнем подаваемой мощности. Для каждого оборудования подаваемый уровень мощности зависит от его приводной скорости, и подача требуемой мощности оптимизируется в зависимости от его приводной скорости.
Кроме того, определение заданного значения скорости турбины BP позволяет максимально увеличить скорость оборудования в следующих целях:
- эксплуатировать оборудование на полную мощность на протяжении всего полета;
- увеличить общую производительность турбины BP и оборудования с целью снижения потребления топлива;
- снизить уровень шума, создаваемого оборудованием, изменяя его скорость в определенных диапазонах, особенно на земле.
Кроме того, в режиме полета нагрузочный компрессор имеет дополнительную степень свободы за счет изменения скорости вращения. Таким образом, уменьшение его размеров может быть осуществлено при изопроизводительности.
Скорректированный в полете расход воздуха является определяющим размеры для нагрузочного компрессора. Он сможет работать на максимальной скорости. Следовательно, так как на земле требуемый корректируемый расход воздуха значительно меньший, приводная скорость снижается. Кроме того, изменение производительности турбины TL приводит к увеличению ее скорости в полете относительно ее скорости на земле. Сочетание этих двух факторов приводит к выигрышу в потреблении.
Кроме того, производительность и оптимальный уровень шума могут быть получены для каждого оборудования, в зависимости от его приводной скорости, которая следует из подаваемой мощности каждому оборудованию в соответствии с описанным выше способом. В частности, снижение скорости снижает уровень шума, издаваемого нагрузочным компрессором и газогенератором, что обеспечит соответствие шумовым критериям на земле и при заходе на посадку.
Согласно предпочтительным вариантам осуществления, заданное значение скорости вращения каскада BP регулируется, чтобы преимущественно в любой момент времени:
- адаптировать скорость вращения каскада BP к подаче мощности, требуемой каждым оборудованием;
- адаптировать скорость вращения каскада BP к общей максимальной производительности за счет минимизации мощности, подаваемой каскадом HP в соответствии с требуемой мощностью;
- адаптировать скорость вращения каскада BP к конкретным условиям применения, в частности для минимизации уровня шума.
Согласно предпочтительному варианту осуществления способ предусматривает дополнительный этап опережения, на котором заданное значение скорости каскада HP силовой установки регулируют в зависимости от изменения требуемой мощности и/или измеренной мощности. Преимущественно эта функция «опережения» осуществляется до нормальной реакции регулирования режима работы двигателя. Она позволяет упредить изменение скорости вращения каскада HP, применяемое для перехода от предыдущего потребления мощности, связанного с предыдущей скоростью каскада HP, к новому потреблению мощности, связанному со скоростью каскада HP, получаемому в устойчивом режиме. Информация о требуемом изменении мощности, ставшая известной как можно раньше, позволяет в этом случае наилучшим образом упредить реакцию, которую должен выдать каскад HP.
Мгновенные сведения о требуемой мощности, которые позволяют немедленно действовать на заданное значение каскада HP и таким образом непосредственно на скорость HP, допускают менее значительные отклонения скоростей каскада BP. Полученные изменения остаются, таким образом, в пределах, допустимых производителем оборудования и диапазона турбины TL, отклонения составляют, например, от 30 до 10%. Не требуется никакого сброса мощности, и обеспечивается гарантия подачи мощности.
Настоящее изобретение также относится к регулирующему приводу, выполненному с возможностью осуществления описанного выше способа. Этот регулирующий привод соединяет регулятор скорости каскада BP, регулятор скорости каскада HP и регулятор расхода топлива. Регулятор скорости каскада BP включает в себя средство-компаратор для выработки заданного значения скорости каскада BP на основе измерений, переданных средствами измерения подаваемых мощностей, и минимальных скоростей вращения, соответствующих мощностям, требуемым каждым оборудованием, приводимым в действие силовой установкой, и на основе данных об изменении мощности в зависимости от скорости для каждого оборудования.
Вычитатель измеряет разницу между выработанным таким образом заданным значением и скоростью каскада BP. Эта разница передается в первый преобразователь, который ее преобразует в разницу скорости каскада HP для передачи в регулятор скорости каскада HP. Этот регулятор включает в себя средства выработки заданного значения скорости каскада HP на основе первого преобразователя. Заданное значение скорости HP проходит через ограничительный фильтр, который перестраивает заданные значения в допустимых диапазонах.
Сформированное заданное значение затем передается в регулятор расхода в виде заданного значения расхода через второй преобразователь. В регуляторе расхода заданное значение проходит в ограничительный фильтр, который перестраивает заданные значения в допустимых диапазонах перед тем, как передать в виде команды в дозатор топлива.
В соответствии с конкретными вариантами осуществления:
- вычитатель значений скорости каскада HP в двух последовательных моментах времени подает с учетом постоянства мощности, измеренной в средстве корректировки скорости каскада BP, корректирующие приращения в средство выработки заданного значения скорости BP;
- фильтр ограничения шума связан также со средством корректировки скорости каскада BP;
- компаратор опережения выполнен с возможностью корректировки заданного значения скорости каскада HP силовой установки в зависимости от изменения между подаваемой мощностью и измеренной мощностью перед тем, как быть подвергнутым воздействию ограничительного фильтра скоростей;
- средство непрерывного измерения подаваемой мощности каждому оборудованию, измерение может быть прямым, в частности ваттметром или набором торсиометр/тахометр, или косвенным расчетным путем на основе данных, в частности произведения тока и напряжения, полученных из соответствующих измерительных средств;
- изменения требуемых мощностей количественно определены в блоке цифровой обработки на входе регулятора скорости HP, исходя из команд, переданных системой пилотирования и блоком управления систем управления полетом летательного аппарата, а также других ранее полученных параметров, в частности условий окружающей среды по температуре и давлению или состояния входов/выходов генератора мощности.
Настоящее изобретение также относится к летательному аппарату, содержащему силовую установку, регулирующий привод скоростей каскадов BP и HP, а также расхода топлива, при этом регулирующий привод выполнен, как описано выше, для осуществления вышеописанного способа оптимизации.
Краткое описание чертежей
Другие аспекты, особенности и преимущества изобретения поясняются следующим, не ограничивающим изобретение описанием, относящимся к частным случаям осуществления со ссылками на сопровождающие чертежи, на которых показано соответственно:
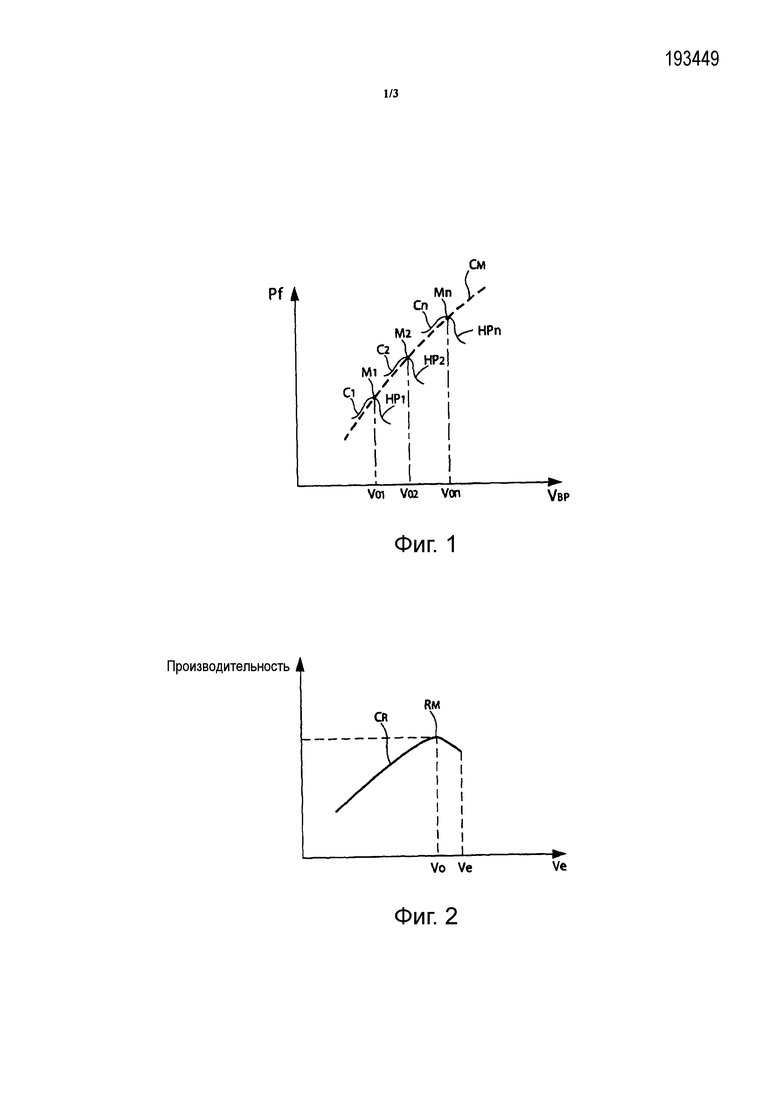
фиг. 1 - кривые изменения механической мощности, подаваемой каскадом BP на его валу в зависимости от его скорости вращения для различных условий окружающей среды;
фиг. 2 - кривая производительности оборудования в зависимости от его приводной скорости для определения мощности, требуемой этим оборудованием, и
фиг. 3 - блок-схема регулирующего привода, приведенного в качестве примера, в соответствии с изобретением.
Подробное описание
В соответствии с фиг. 1 представлены кривые с С1 по Cn механической мощности Pf, подаваемой каскадом BP силовой установки с турбиной TL. Мощность Pf представлена в виде зависимости от скорости вращения VBP каскада BP для заданных условий окружающей среды - температуры и давления, на входе каскада BP, и для различных уровней тепловой мощности каскада HP, HP1 до HPn. Каждая кривая С1-Cn имеет форму в виде «полицейской каски». Максимальные мощности М1-Mn соответствуют оптимальным скоростям Vol, …, Von, расположенным на оптимальной кривой Cm. Оптимальная кривая Cm сохраняется в памяти для использования в регулирующем приводе для определения величины приращения расчетным путем.
Кроме того, на фиг. 2 показана кривая производительности Cr для данного уровня мощности, подаваемой данному оборудованию, в данном случае нагрузочному компрессору, в зависимости от приводной скорости Ve этого оборудования. Максимальная производительность Rm получена при оптимальной скорости Vo, близкой к предельно допустимой скорости V1. Скорости Vo всего оборудования также сохраняются в памяти для использования в описанном ниже регулирующем приводе.
В соответствии с фиг. 3 представлен пример регулирующего привода, состоящего из трех регуляторов 11, 12 и 13. Этот регулирующий привод оборудует силовую установку со свободной турбиной TL летательного аппарата в контакте с системой пилотирования и блоком управления летательного аппарата для приема данных и команд регулирования. Регуляторы привода 1 распределены следующим образом:
- регулятор скорости вращения 11 приводного вала каскада BP турбины TL силовой установки;
- регулятор скорости 12 каскада HP турбины TL силовой установки;
- регулятор расхода топлива 13 силовой установки.
Для каждого оборудования E1, Е2, …, кривая Cm1, Cm2, … скорости V1, V2, …, соответствующие требуемым мощностям Pd1, Pd2, … - для любых условий окружающей среды по температуре и давлению, на входе каскада BP - определены производителем. Каждая кривая Cm1, Cm2, … позволяет в любой момент узнать минимальную скорость Vm1, Vm2, …, исходя из которой оборудование способно подавать частичную требуемую мощность.
Для облегчения использования данных, численные значения вращения оборудования преобразуются в значения вращения вала BP с учетом понижающих и/или повышающих коэффициентов зубчатых передач, например, сосредоточенных в коробке передачи мощности.
Для блока Ei оборудования, представленного в примере, максимальное значение Max(Vmi) минимальных скоростей Vmi определяется в условиях окружающей среды. Это значение Max(Vmi) является максимально допустимой скоростью для каждого оборудования блока Ei. При этом значении Vmi все приводимое в движение оборудование способно подавать мощность, которая ему требуется. Полученное значение Max(Vmi) может сравниваться преимущественно с допустимыми пределами, в частности, в диапазоне от 50% до 100%.
Определенное таким образом значение Max(Vmi) передается в сумматор S1 регулятора скорости каскада BP 11. Сумматор S1 также включает при каждой обработке заданного значения скорости каскада BP положительное приращение "е" скорости BP, в данном случае равное 1%, для получения заданного значения CBP скорости каскада BP следующим образом:
CBP=Мах(Vmi)+е.
Приращение скорости BP "е" введено лишь условно до тех пор, пока скорость VHP каскада HP не минимизируется. Изменение скорости каскада HP следует в вычитатель S2, выдавая сведения о разнице "d". Если в момент времени t значение измеренной скорости вращения каскада HP (VHP) t меньше, чем в предыдущий момент t-1, (VHp) t-l, то разница "d" между этими значениями отрицательная. Если при этом измеренная мощность Pm на каскаде BP остается постоянной в этом интервале времени (t-t-1), то средство корректировки 01, в котором используется Pm, передает значение "е", равное 1%, в сумматор S1. В противном случае значение приращения равно 0. Такая корректировка позволяет устранить колебания измерений и вычислить значение приращения "е".
Приращение также может быть получено расчетным путем. При данной выдаваемой мощности для каждого оборудования могут использоваться различные формы, моделирование, составление уравнения с поиском минимальной точки, итерация и т.д. Цель состоит в том, чтобы найти скорость каскада BP, которая минимизирует скорость каскада HP при постоянно вырабатываемой мощности каждым оборудованием. Например, для оборудования i, которое подает мощность Pmi при любой приводной скорости VBP, соответствует приводная мощность оборудования i Pmi. В сумме Pmi дает мощность, подаваемую каскадом BP при скорости VBP. Кривая в форме полицейской каски дает соответствующее значение VHP. Расчет определяет в этом случае минимальное значение VHP.
Информация, относящаяся к шуму В1, преимущественно вводится в средство корректировки 01. Поскольку уровень шума в оборудовании выше предельного значения, например 100 дБ, информация о шуме также инициирует приращение "е", и минимизация шума до уровня ниже этого порога регулируется аналогично регулированию скорости VHP.
Заданное значение CBP скорости каскада BP выдается сумматором S1 и передается в вычитатель S3, который сравнивает измеренное значение VmBP скорости каскада BP со значением СВР. Преобразователь С2 преобразует изменение скорости каскада BP в эквивалентное изменение скорости VHP каскада HP.
Изменение скорости VHP передается в вычитатель S4 опережения регулятора 12 скорости каскада HP. Вычитатель S4 сравнивает это изменение скорости VHP со значением из компаратора С3 обработки "закона" опережения для получения заданного значения скорости CHP каскада HP.
Этот закон опережения состоит в корректировке скорости VHP каскада HP в зависимости от изменения мощности Pd, требуемой оборудованию, а также от изменения измеренной мощности на валу Pm.
Закон опережения позволяет, таким образом, исходя из изменений подаваемой и измеренной мощности, определить изменения потребности мощности и определить изменение скорости VHP, применяемое для обеспечения нового потребления мощности.
Заданное значение скорости СНР каскада HP сравнивается со значениями ограничений в ограничительном фильтре 22, который перестраивает заданные значения в допустимых пределах.
На выходе из фильтра 22 заданное значение скорости CHP сравнивается с измерением скорости VmHP в вычитателе S5. Полученная разница поступает в преобразователь С4, который преобразует разницу скорости в разницу расхода топлива для обеспечения на выходе заданного значения расхода топлива Сс.
Заданное значение расхода топлива Сс передается в регулятор расхода 13 в виде команды дозатору топлива 23 посредством ограничителя расхода 24. Изменение расхода топлива, впрыскиваемого в камеру сгорания силовой установки, изменяет в этом случае скорость VHP каскада HP и, следовательно, уровень подаваемой энергии. При постоянном потреблении мощности это изменение скорости VHP каскада HP изменяет скорость VBP каскада BP: образуется новый контур регулирования для контроля скоростей.

Изобретение предназначено для оптимизации регулирования впрыскивания топлива. С этой целью приводные скорости всего оборудования адаптируются путем регулирования скорости турбины TL в зависимости от мощности. Согласно изобретению способ оптимизации регулирования силовой установки со свободной турбиной TL летательного аппарата, оборудованной каскадом низкого давления ВР, вырабатывающим мощность (Pd1, Pd2,...) оборудованию (E1, E2,...) в контакте с каскадом высокого давления HP, заключается в изменении скорости каскада низкого давления ВР (Vвp) для получения минимальной скорости каскада HP (Vнp) таким образом, чтобы мощность (Pf), подаваемая оборудованием, оставалась постоянной. В частности, поскольку мощности, подаваемые оборудованием (E1, E2,...), зависят от приводной скорости каскада BP, заданная скорость каскада BP турбины TL зависит от максимального значения Max(Vmi) минимальных скоростей (Vm1, Vm2,...) оборудования (E1, E2,...), позволяющего получать оптимизированным образом соответствующие требуемые мощности, и от положительного или нулевого приращения (е), добавленного к заданному значению скорости каскада BP (Свр), чтобы минимизировать скорость каскада HP (Vнp). 3 н. и 12 з.п. ф-лы, 3 ил.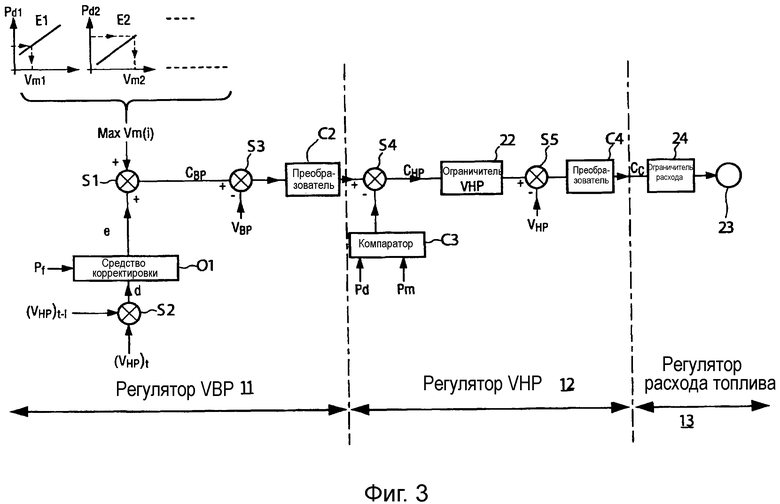
1. Способ оптимизации регулирования силовой установки со свободной турбиной TL летательного аппарата, оборудованной каскадом низкого давления BP, который выдает мощность на оборудование (E1, Е2, …) в контакте с каскадом высокого давления HP, отличающийся тем, что он состоит в изменении скорости каскада низкого давления BP (VBP) в зависимости от максимального значения (Max(Vmi)) минимальных скоростей (Vm1, Vm2) оборудования и положительного или нулевого приращения (е), чтобы минимизировать скорость каскада HP (VHP) для получения минимальной скорости каскада HP (VHP) таким образом, чтобы мощность (Pf), подаваемая оборудованием, оставалась постоянной.
2. Способ оптимизации по п. 1, в котором мощности (Pf), подаваемые оборудованием, зависят от приводной скорости каскада BP, заданное значение скорости каскада BP (CBP) турбины TL зависит от максимального значения (Max(Vmi)) минимальных скоростей (Vm1, Vm2) оборудования, позволяющего получить оптимизированным образом соответствующие требуемые мощности, и от положительного или нулевого приращения (е), добавленного к заданному значению скорости каскада BP (CBP), чтобы минимизировать скорость каскада HP (VHp) для постоянной подачи мощности оборудования.
3. Способ оптимизации по п. 1, в котором непрерывное измерение мощности (Pf), подаваемой каждым оборудованием, позволяет обнаружить устойчивое функционирование потребления подаваемой мощности и в этом случае инициировать приращение.
4. Способ оптимизации по п. 1, в котором приращение определяют расчетным путем, исходя из кривых производительности (CR) оборудования и свободной турбины.
5. Способ оптимизации по п. 4, в котором для каждого оборудования уровень тепловой мощности каскада HP, передаваемой на каскад BP, и для каждого условия окружающей среды по температуре и давлению на входе силовой установки существует скорость вращения каскада BP, которая позволит выдавать на его валу максимальную механическую мощность.
6. Способ оптимизации по п. 1, в котором приращение определяют путем обнаружения изменения скорости каскада HP, при этом приращение применяют до тех пор, пока скорость каскада HP не станет минимальной.
7. Способ оптимизации по п. 1, в котором заданное значение скорости вращения каскада BP (CBP) регулируют, чтобы, в первую очередь, в любой момент адаптировать скорость вращения каскада BP (VBP) к подаче мощности, требуемой (Pd) каждым оборудованием, и/или адаптировать скорость вращения каскада BP (VBP) к общей максимальной производительности за счет минимизации мощности, подаваемой турбиной BP, в соответствии с требуемой мощностью, и/или адаптировать скорость вращения каскада BP (VBP) к конкретным рабочим условиям, в частности, для того, чтобы минимизировать уровень шума (В1).
8. Способ оптимизации по п. 1, в котором способ предусматривает дополнительный этап опережения, на котором заданное значение скорости (VHP) каскада HP силовой установки регулируют в зависимости от изменения мощности (Pd), требуемой для оборудования, а также от изменения измеренной мощности (Рт) на приводном валу.
9. Регулирующий привод, выполненный с возможностью осуществления способа по п. 1, отличающийся тем, что он соединяет регулятор скорости каскада BP (11), регулятор скорости каскада HP (12) и регулятор расхода топлива (13), при этом регулятор скорости каскада BP включает в себя средство-компаратор (01) для выработки заданного значения скорости каскада BP (CBP), исходя из измерений, передаваемых средствами измерения подаваемых мощностей (Pf), и минимальных скоростей вращения (Vmi), соответствующих мощностям (Pd), требуемым каждым оборудованием, приводимым в движение силовой установкой, и исходя из данных об изменении мощности в зависимости от скорости для каждого оборудования, и тем, что вычитатель измеряет разницу между выработанным таким образом заданным значением (CBP), и скоростью каскада BP (VBP), тем, что эта разница передается в первый преобразователь (С2), который преобразует ее в разницу скорости каскада HP для передачи в регулятор скорости каскада HP (12), тем, что этот регулятор HP содержит средства (S4, С3) выработки заданного значения скорости каскада HP (CHP) на основе первого преобразователя (С2), и тем, что заданное значение скорости HP (CHP) проходит через ограничительный фильтр (22), который перестраивает заданные значения в допустимых диапазонах, перестроенное заданное значение передается в регулятор расхода (13) в виде заданного значения расхода (Сс) через второй преобразователь (С4).
10. Регулирующий привод по п. 9, в котором заданное значение регулятора расхода (Сс) проходит в ограничительный фильтр (24), который перестраивает заданные значения в допустимых диапазонах, перед тем, как передать в дозатор топлива (23).
11. Регулирующий привод по п. 9, в котором вычитатель значений скорости каскада HP в двух последовательных моментах времени подает с учетом постоянства мощности, измеренной в средстве корректировки скорости каскада BP (01), корректирующие приращения (е) в средство выработки заданного значения скорости BP (01).
12. Регулирующий привод по п. 9, в котором фильтр ограничения шума (В1) связан со средством корректировки скорости каскада BP (01).
13. Регулирующий привод по п. 9, в котором компаратор опережения выполнен с возможностью корректировки заданного значения скорости каскада HP (CHP) в зависимости от изменений подаваемой мощности (Pf) и мощности, измеренной на приводном валу (Pm), перед тем, как быть подвергнутым воздействию ограничительного фильтра скоростей.
14. Регулирующий привод по п. 9, в котором изменения требуемых мощностей количественно определены в блоке цифровой обработки на входе регулятора скорости HP, исходя из команд, переданных системой пилотирования и блоком управления систем управления полетом летательного аппарата, а также других ранее полученных параметров.
15. Летательный аппарат, содержащий силовую установку, регулирующий привод скоростей каскадов BP и HP, а также расхода топлива, отличающийся тем, что регулирующий привод выполнен в соответствии с п. 9 для осуществления способа оптимизации по п. 1.
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УРОВНЯ ЖИДКОСТИ В СОСУДЕ | 2000 |
|
RU2178151C1 |
| US2003126864A1,10.07.2003 | |||
| US4928482A,29.05.1990 | |||
| US4488236A,11.12.1984 | |||
| US4185203A,22.01.1980 | |||
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭНЕРГЕТИЧЕСКОЙ УСТАНОВКОЙ | 2007 |
|
RU2360137C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ГАЗОТУРБИННОГО ПРИВОДА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2252329C1 |

