Изобретение относится к области управления газотурбинными двигателями, используемыми в качестве силовых агрегатов в газовой и энергетических отраслях.
Известен способ регулирования характеристик и диагностики состояния газотурбинного двигателя (пат. РФ №2040699, F02С 9/28, 1995 г.), заключающийся в том, что формируют заданное значение параметров, измеряют параметры двигателя, вычисляют дифференциальную составляющую измеренного параметра, вычисляют пропорциональную и интегральную составляющие разности заданного и измеренного значений управляющего воздействия как сумму пропорциональной, дифференциальной и интегральной составляющих, контролируют правильность измерения и вычисления значений параметров, пропорциональной, дифференциальной, интегральной, пропорционально-дифференциальной составляющих и управляющего воздействия, и при отсутствии сбоев при расчете управляющего воздействия разрешают прохождение управляющего воздействия на управление расходом топлива в двигатель, в процессе испытания формируют заданные значения отклонений режимов работы от номинальных значений, передают их по линиям связи, принимают и изменяют заданное значение параметра в соответствии с заданным значением отклонения, для проверки работы двигателя на контуре регулирования по выбранному параметру формируют команду на снижение настройки заданного значения параметра на заданную величину, обеспечивающую устойчивую работу на выбранном контуре регулирования, передают ее, принимают и отрабатывают команду на снижение настройки заданного значения параметра, при проверке работоспособности противопомпажной системы формируют команду «Имитация помпажа», передают ее, принимают и отрабатывают по заданному алгоритму, формируют управляющее воздействие на изменение расхода топлива, необходимое для восстановления заданного режима работы двигателя, при проведении диагностики состояния двигателя формируют команду на отключение контроля правильности измерения выбранного параметра, вычисление составляющих, управляющего воздействия, передают ее, принимают и производят отключение соответствующего контроля.
Недостатком данного способа является то, что способ не учитывает нелинейность характеристик газотурбинного двигателя, а также не обеспечивает формирование согласованного управляющего воздействия с учетом всех параметров, характеризующих работу двигателя.
Известен способ управления многомерным объектом (пат. РФ №2172419, F02С 9/26, G05D 7/00), в соответствии с которым осуществляют формирование по каждому управляемому параметру при помощи регулятора параметра управляющих сигналов, сравнение значений этих сигналов, выбор сигнала с наименьшим значением и осуществление этим сигналом регулирования исполнительного органа, причем управляющий сигнал как минимум по одному управляющему параметру формируют путем суммирования выходного сигнала регулятора параметра и соответствующего этому параметру преобразованного выходного сигнала.
Недостатком данного способа является то, что для регулирования используется ПИ-закон, который обеспечивает удовлетворительное качество регулирования только для объектов, представляющих собой инерционное звено первого порядка. Для объектов регулирования более высокого порядка дифференцирующий канал ПИ-регулятора не компенсирует полностью инерционность объекта, и поэтому ПИ-регулятор не всегда обеспечивает удовлетворительное качество регулирования, поскольку для обеспечения быстродействия необходимо применение дополнительной динамической коррекции.
В случае управления газотурбинными приводами газоперекачивающих агрегатов и газотурбинных электростанций возникают задачи управления объектами, представляющими собой инерционное звено второго порядка. В частности, такими звеньями описываются передаточные функции частоты вращения нагнетателя в газоперекачивающем агрегате и частоты вращения генератора в газотурбинной электростанции, а стабилизация и регулирование именно этих частот вращения и является основной задачей системы управления.
Известен способ управления работой комплекса агрегатов компрессорного цеха (пат. РФ №2181854, F04D 27/02, F01K 7/24), заключающийся в том, что измеряется давление транспортируемого газа на входе и выходе нагнетателей, температура транспортируемого газа на входе и выходе нагнетателей, частота вращения роторов нагнетателей, значение основного параметра газа компрессорного цеха (давления или расхода), которое сравнивается с заданной величиной основного параметра, и формируются управляющие воздействия на системы подачи топлива приводов газоперекачивающих агрегатов, входящих в состав компрессорного цеха, заданные величины частот вращения роторов нагнетателей определяют с использованием статических функций, при этом по давлениям технологического газа на входе и выходе параллельно работающих нагнетателей, температуре на входах и выходах нагнетателей и частотам вращения роторов нагнетателей определяют объемную производительность, политропический коэффициент полезного действия и требуемую для обеспечения заданного давления на выходе политропическую мощность сжатия каждого нагнетателя, суммируя которые, получают требуемую политропическую мощность сжатия компрессорного цеха, по политропической мощности сжатия и политропическому коэффициенту полезного действия для каждого агрегата определяют механическую мощность на валу привода нагнетателя, по которой рассчитывают расход топливного газа приводов каждого агрегата и общий расход топливного газа компрессорного цеха, далее путем неоднократного повторения этих действий с перебором значений частот вращения роторов нагнетателей при условии сохранения политропической мощности сжатия компрессорного цеха постоянной и равной требуемой политропической мощности компрессорного цеха получают ряд значений частот вращения роторов нагнетателей, из них, по минимуму общего расхода топливного газа компрессорного цеха и с учетом ограничений, выбирают тот, который считают оптимальным значением задания на частоты вращения роторов нагнетателей на данном шаге, и подают в систему управления газоперекачивающих агрегатов в качестве управляющего воздействия, при этом функциональные зависимости для каждого из нагнетателей непрерывно параметрически настраивают с использованием величин давлений транспортируемого газа на входе и выходе нагнетателя, температур транспортируемого газа на входе и выходе нагнетателя и расхода топливного газа, получаемых прямыми или косвенными измерениями в процессе работы агрегата.
Недостатком данного способа является то, что он может приводить к выводу наиболее эффективных агрегатов на режимы, приближенные к максимальному, при этом остальные агрегаты будут недогружены, а общий диапазон регулирования комплекса компрессоров - уменьшен.
Известен способ управления работой комплекса газотурбинных компрессорных агрегатов (пат. РФ №2219375, F04D 27/00), заключающийся в том, что измеряется давление газа на входе и выходе компрессоров, частота вращения роторов нагнетателей, значение регулируемого параметра газа комплекса агрегатов (давления, степени сжатия или расхода), которое сравнивается с заданной величиной регулируемого параметра, и формируются управляющие воздействия на системы подачи топлива приводных двигателей компрессорных агрегатов, входящих в состав комплекса агрегатов, по разности измеренного прямым или косвенным образом значению регулируемой величины (давления на выходе комплекса компрессорных агрегатов, степени сжатия комплекса компрессорных агрегатов или расхода транспортируемого газа через комплекс компрессорных агрегатов) с заданным значением этой величины определяют величину, посредством отнесения которой к количеству работающих на нагрузку компрессоров получают среднее значение требуемой частоты вращения ротора компрессора каждого компрессорного агрегата, после чего для каждого компрессорного агрегата по измеренным частотам вращения валов газогенератора газотурбинного привода, вала компрессора, температуре продуктов сгорания перед турбиной газогенератора и/или силовой турбиной газотурбинного привода компрессора, давлению за компрессором газотурбинного привода, давлением газа на входе компрессора и перепаду давлений на конфузоре компрессора определяют величины запасов до ограничений по частотам вращения валов, температуре продуктов сгорания, давлению в камере сгорания, давлению на входе компрессора и расстоянию до границы помпажа компрессора, полученные величины приводят к одному диапазону значений при помощи нормирующих коэффициентов, нормированные величины затем усредняют с учетом направленности ограничений, получая таким образом обобщенные значения запасов до верхних и нижних ограничений по каждому компрессорному агрегату, и по обобщенным значениям запасов и среднему требуемому значению частоты вращения ротора компрессора определяют требуемое значение частоты вращения ротора для каждого компрессора, которое подают в локальные САУ компрессорных агрегатов в качестве управляющего задания (воздействия).
Недостатком данного способа является невозможность длительной работы вблизи уровней ограничений.
Технический результат, полученный при осуществлении (изготовлении) или использовании средства, воплощающего изобретение, выражается в более эффективном управлении газотурбинным двигателем вблизи границ рабочего диапазона частот вращения, температуры продуктов сгорания и давления за компрессором, в результате чего расширяется диапазон допустимых режимов работы, повышается ресурс, эффективность и безопасность работы газотурбинного двигателя. Также улучшается способность системы управления противостоять возмущающим воздействиям по нагрузке и по изменению внешних условий.
Это достигается тем, что в способе управления подачей топлива для газотурбинных двигателей, заключающемся в том, что измеряется частота вращения ротора газогенератора, частота вращения ротора свободной турбины, температура продуктов сгорания в газовоздушном тракте двигателя, давление за компрессором газогенератора, и формируется управляющее воздействие на исполнительный орган - клапан, дозирующий подачу топлива в камеру сгорания, величину управляющего воздействия определяют с помощью совокупности регулирующих и ограничительных контуров контура отрицательной обратной связи с адаптивным законом регулирования, при этом регулирующие контуры поддерживают заданную величину частоты вращения ротора газогенератора или частоты вращения ротора свободной турбины, а ограничительные контуры предупреждают аварийные ситуации, удерживая параметры двигателя в заданном диапазоне, в каждый момент времени в качестве управляющего воздействия выбирают значение выхода одного из контуров, выбор которого осуществляют селектором минимума-максимума как результат формирования ошибки регулирования в каждом контуре на основании текущих измерений физических величин с последующим вычислением выходных значений контура, вычислением отдельно приращения к общему интегратору от каждого контура и дальнейшим последовательным сравнением выходных значений контуров друг с другом, при этом для регулирующих и верхних ограничительных контуров в качестве активных выбирают тот контур, выходное значение которого минимально, для нижних ограничительных контуров выбирают контур, выходное значение которого максимально, после чего выходное значение выбранного активного контура складывают с величиной, накопленной в общем интеграторе, а рассчитанное приращение от активного контура прибавляют к величине значения общего интегратора для последующих вычислений и вырабатывают согласованное управляющее воздействие
На фиг.1 показана функциональная схема системы топливного регулирования газотурбинных двигателей.
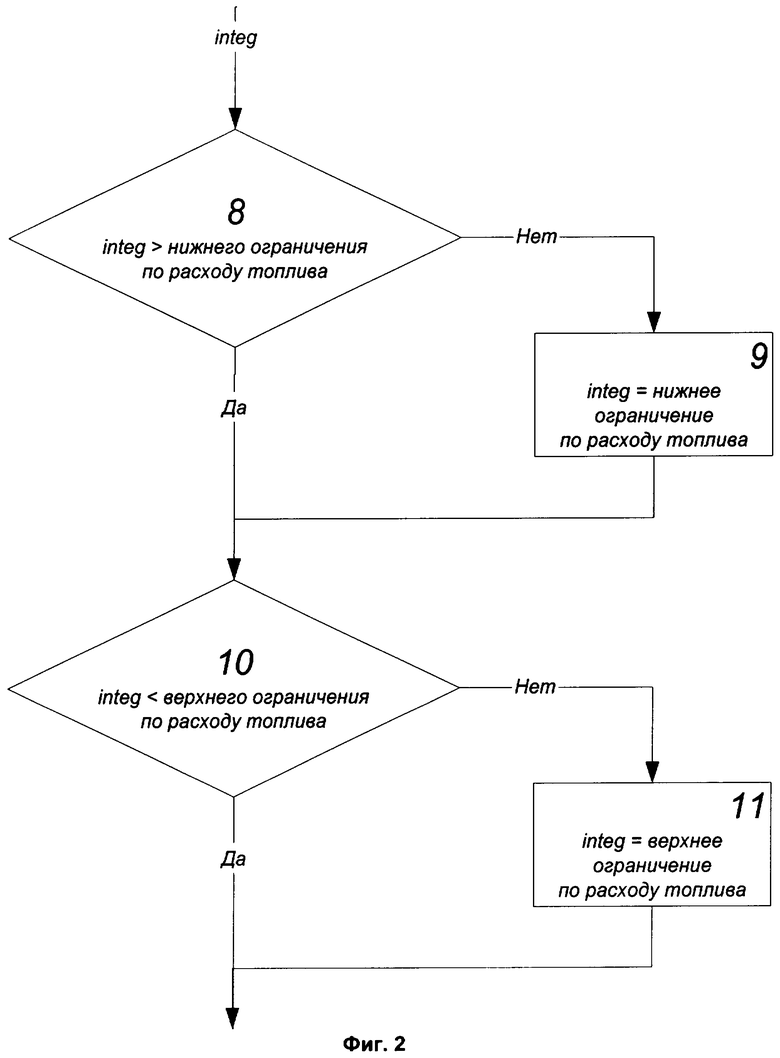
На фиг.2 показан алгоритм функционирования в случае жесткого ограничения расхода топлива.
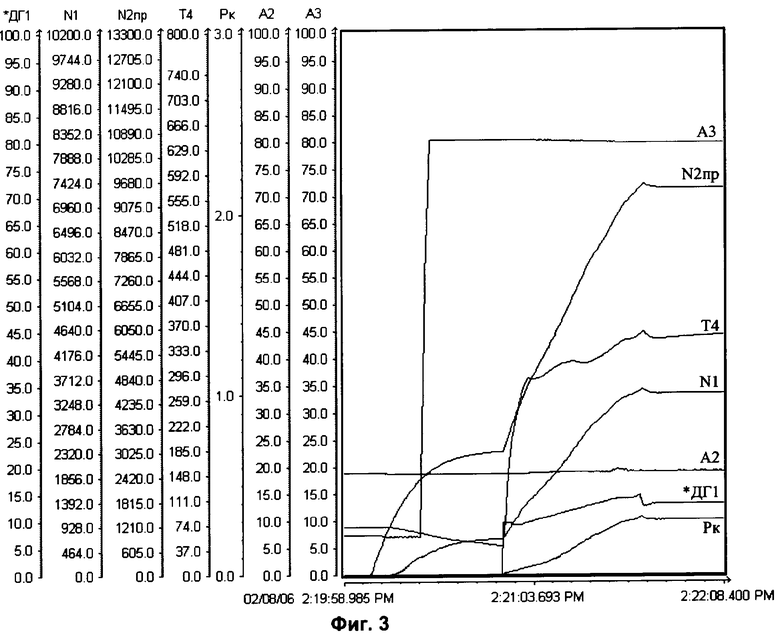
На фиг.3 показан процесс запуска газотурбинного двигателя на режим «Малый газ».
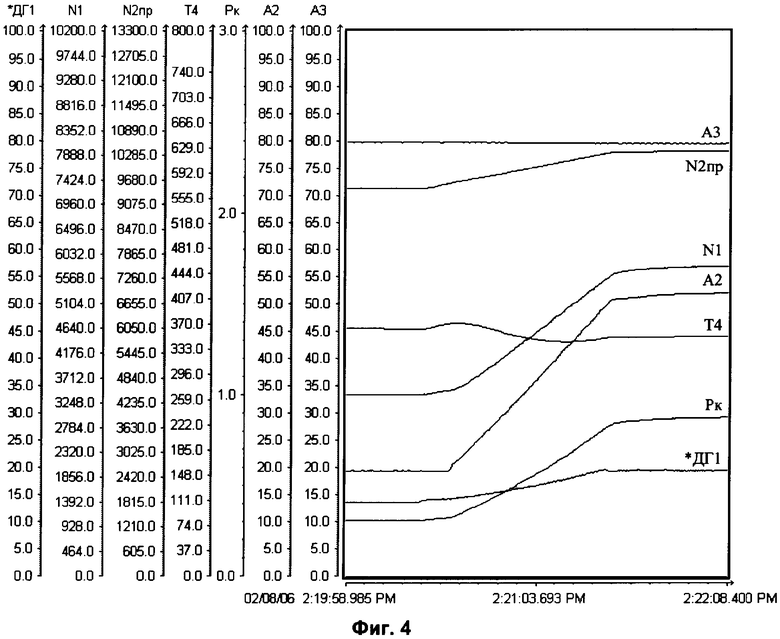
На фиг.4 показан переходный процесс при изменении задания на частоту вращения.
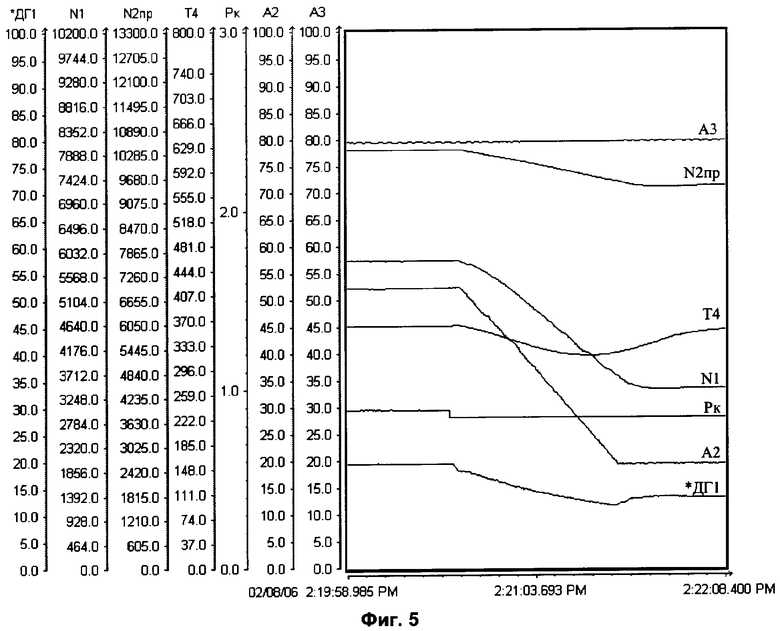
На фиг.5 показан переходный процесс при разгрузке газотурбинного двигателя до режима «Малый газ».
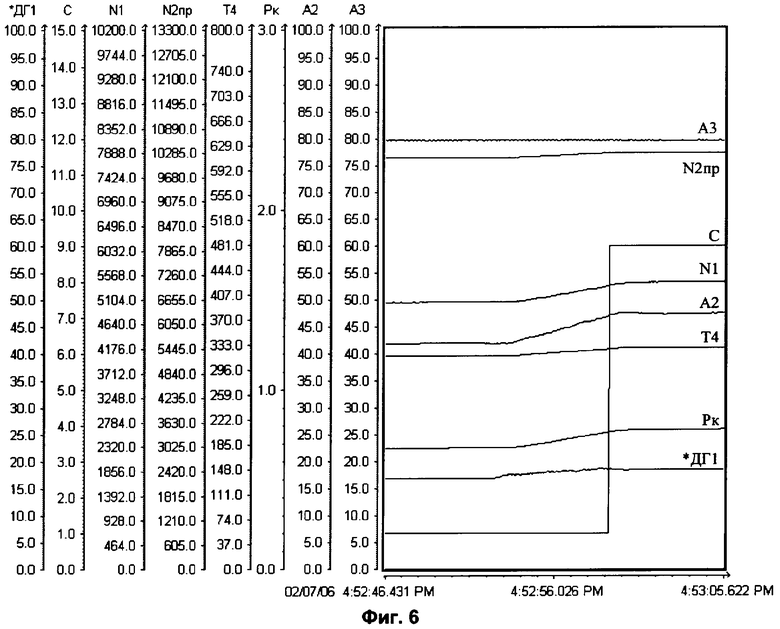
На фиг.6 показан переходный процесс при срабатывании ограничительного контура по температуре газов за турбиной низкого давления.
При управлении газотурбинным двигателем (фиг.1) подача топлива осуществляется за счет того, что несколько контуров обратной связи воздействуют на один исполнительный орган - дозатор топлива. В каждый момент времени контур обратной связи замкнут только по одному регулируемому параметру, остальные параметры регулируются только вблизи ограничений и не участвуют в управлении. Когда расстояние до ограничений велико, для выбора управляющего контура и переключения на него применяют селекторую схему, включающую селекторы минимума и максимума. При работе непрерывно вычисляются выходы всех контуров обратной связи, при этом в контурах выполняется нормирование различных физических величин (частот вращения турбин, температуры продуктов сгорания, давления за компрессором) к расходу топлива, из вычисленных значений выбирается минимум для ограничений сверху и максимум для ограничений снизу, выбранный контур обратной связи получает управление, остальные при этом разомкнуты, схема выбора управляющего контура обратной связи основана на том, что каждый регулятор можно представить в виде разностного уравнения


yk=xk·Kрег·(τрег1+τрег2)+d+i
где xk, xk-1 - значения входа регулятора на текущем и предыдущем шаге вычислений соответственно, cycle - шаг работы цифрового регулятора, yk - значение выхода регулятора на текущем шаге вычислений, Крег, τрег1, τрег2 - коэффициенты, обеспечивающие необходимые динамические свойства регулятора, интегральные части i у всех контуров имеют одинаковую физическую размерность, и выбор управляющего воздействия можно осуществлять таким образом: вычислить выходы всех контуров за вычетом постоянной составляющей i:


yk=xk·Kрег·(τрег1+τрег2)+d+dInteg
и выбрать один из них при помощи селектора, затем вычислить управляющий выход, прибавив к выходу селектора yk значение общего интегратора integ, а затем получить из селектора номер выбранного контура и прибавить к общему интегратору соответствующее приращение dInteg. По существу предлагаемый способ заключается в том, что при управлении многомерным объектом ПИД-контур по каждому из параметров не имеет своего интегратора, а определяет лишь приращение к интегратору dInteg, накапливаемый же выход интегратора - один для всех контуров.
Рассмотрим более подробно работу показанной на фиг.1 системы топливного регулирования газотурбинных двигателей, осуществляющей предлагаемый способ управления. Сначала рассчитывается управляющее воздействие из рабочего контура 3 обратной связи и контуров 21...2k нижних ограничений, полученные по приведенным формулам значения out сравниваются в селекторе 5 максимума, и выбирается контур с наибольшим значением out, значение dInteg выбранного контура запоминается, затем рассчитываются по приведенным формулам значения управляющего воздействия из контуров верхних ограничений 11...1n, полученные значения сравниваются между собой и с полученным от селектора максимума 5 результатом в селекторе минимума 4, по минимальному значению out выбирается контур, управляющее значение с которого будет задействовано при управлении, интегратор изменяется на подсчитанную в выбранном контуре величину dInteg, при необходимости введения жестких ограничений по расходу топлива величина интегратора, вычисленная как результат обработки контуров с системой обратной связи, сравнивается с ограничением топлива.
Алгоритм функционирования системы в случае жесткого ограничения расхода топлива представлен на фиг.2. Подсчитанное в результате работы селектора минимума значение integ поступает на вход сравнивающего блока 8, в случае, если integ больше нижнего ограничения по расходу топлива, в блоке 10 проверятся условие, что integ меньше верхнего ограничения по расходу топлива, если это условие также выполняется - полученное значение integ выбирается для управления дозатором топлива, если же условие 8 либо 10 не выполняются, то в качестве integ выбирается значение нижнего или верхнего ограничения расхода топлива соответственно.
На фиг.3, 4, 5, 6 приняты следующие обозначения: *ДГ1 - задание на дозатор газа, %; N1 - физическая частота вращения компрессора низкого давления, об/мин; N2пр - приведенная частота вращения компрессора высокого давления, об/мин; N3 - приведенная частота вращения свободной турбины, об/мин; Т4 - температура газов за турбиной низкого давления, °С; Рк - давление воздуха за компрессором высокого давления, МПа; А2 - положение направляющего аппарата компрессора высокого давления, %; A3 - положение клапана перепуска воздуха, %; С - метка контура регулятора.
Показанный на фиг.3 процесс запуска газотурбинного двигателя на режим «Малый газ» обеспечивает плавный выход на режим с перерегулированием не более 80 об/мин и установившейся ошибкой не более 10 об/мин.
Показанный на фиг.4 переходный процесс при изменении задания на частоту вращения N2 на 900 об/мин вверх от текущего режима работы происходит с темпом 50 (об/мин)/с без перерегулирования с установившейся ошибкой не более 10 об/мин.
Показанный на фиг.5 переходный процесс при разгрузке газотурбинного двигателя до режима «Малый газ» происходит с темпом 80 (об/мин)/с, при этом перерегулирование составляет не более 30 об/мин, установившаяся ошибка - не более 10 об/мин.
По переходному процессу на фиг.6 видно, как при срабатывании ограничительного контура по температуре газов за турбиной низкого давления происходит стабилизация температуры газов за ТНД на уровне ограничительной уставки без перерегулирования, переход с регулирующего контура на ограничительный осуществляется безударно.
Данный способ реализован в составе серийных систем автоматического управления газоперекачивающими агрегатами с газотурбинными двигателями ГТК-10-4, ДЖ-59, ДГ-90, ДН-80, Д-336, ПС-90, НК-14СТ-10, ГТД-4РМ, ГТД-6.3РМ, ГТД-10РМ, АЛ-31СТ, а также в составе серийных систем автоматического управления газотурбинными электростанциями с двигателями Д-30 («Урал-2500») и АЛ-31СТЭ (ГТЭ-18).
Средствами реализации данной схемы управления могут быть выбраны системы комплексного управления мультипроцессорные МСКУ 5000-01, МСКУ 5000-03 производства ЗАО «НПФ «Система-Сервис» (Санкт-Петербург). МСКУ-5000 построена на базе программно-технических средств фирмы Siemens Simatic S7. В этой системе вычислительное ядро реализовано на базе процессора CPU 416-2DP. Ввод-вывод осуществляется через распределенную периферию на базе модулей семейства ET-200S. Для обработки быстрых сигналов (с циклом от 0.1 мс) используется модуль FM-458DP с расширителем ЕХМ-438. Программно способ реализован на языке Simatic S7-SCL (язык стандарта МЭК 61131-3).
Предложенное техническое решение обеспечивает эффективное управление газотурбинным двигателем во всем диапазоне значений частот вращения турбин, температуры продуктов сгорания и давления за компрессором, что повышает ресурс двигателя и безопасность работы, особенно в условиях внешних возмущающих воздействий. Способ позволяет повысить качество переходных процессов и точность управления двигателем, что, с одной стороны, за счет высокого качества переходных процессов позволяет обеспечить более щадящее управление двигателем и, таким образом, повышает его ресурс, с другой стороны, позволяет расширить предельно допустимые границы работы за счет высокой точности управления, то есть повысить максимальную мощность двигателя без существенного ухудшения ресурса.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ РАБОТОЙ КОМПЛЕКСА АГРЕГАТОВ КОМПРЕССОРНОГО ЦЕХА | 2001 |
|
RU2181854C1 |
| СПОСОБ УПРАВЛЕНИЯ ПЕРЕГРУЗКОЙ ГАЗОПЕРЕКАЧИВАЮЩИХ АГРЕГАТОВ ОДНОГО ЦЕХА ДОЖИМНОЙ КОМПРЕССОРНОЙ СТАНЦИИ | 2024 |
|
RU2837177C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПОДАЧЕЙ ТОПЛИВА В КАМЕРУ СГОРАНИЯ ГАЗОТУРБИННОЙ УСТАНОВКИ | 2008 |
|
RU2389892C1 |
| СПОСОБ УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМ РЕЖИМОМ КОМПРЕССОРНОГО ЦЕХА С ОПТИМАЛЬНЫМ РАСПРЕДЕЛЕНИЕМ НАГРУЗКИ МЕЖДУ ГАЗОПЕРЕКАЧИВАЮЩИМИ АГРЕГАТАМИ | 2011 |
|
RU2454569C1 |
| СПОСОБ УПРАВЛЕНИЯ РАБОТОЙ КОМПЛЕКСА ГАЗОТУРБИННЫХ КОМПРЕССОРНЫХ АГРЕГАТОВ | 2002 |
|
RU2219375C1 |
| Способ управления подачей топлива в камеру сгорания газотурбинного двигателя | 2022 |
|
RU2786969C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2653262C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ С ФОРСАЖНОЙ КАМЕРОЙ СГОРАНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2466287C1 |
| Система управления турбокомпрессорной установкой | 2018 |
|
RU2691273C1 |
| СПОСОБ ДИАГНОСТИКИ И ПАРИРОВАНИЯ ОТКАЗОВ ДАТЧИКОВ РЕГУЛИРУЕМЫХ ПАРАМЕТРОВ ДВУХКАНАЛЬНОЙ ЭЛЕКТРОННОЙ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2023 |
|
RU2817573C1 |

Изобретение относится к области управления газотурбинными двигателями, используемыми в качестве силовых агрегатов в газовой и энергетических отраслях. Способ заключается в том, что измеряется частота вращения ротора газогенератора, частота вращения ротора свободной турбины, температура продуктов сгорания в газовоздушном тракте двигателя, давление за компрессором газогенератора, и формируется управляющее воздействие на исполнительный орган - клапан, дозирующий подачу топлива в камеру сгорания, величину управляющего воздействия определяют с помощью совокупности регулирующих и ограничительных контуров контура отрицательной обратной связи с адаптивным законом регулирования, при этом регулирующие контуры поддерживают заданную величину частоты вращения ротора газогенератора или частоты вращения ротора свободной турбины, а ограничительные контуры предупреждают аварийные ситуации, удерживая параметры двигателя в заданном диапазоне, в каждый момент времени в качестве управляющего воздействия выбирают значение выхода одного из контуров, выбор которого осуществляют селектором минимума-максимума как результат формирования ошибки регулирования в каждом контуре на основании текущих измерений физических величин с последующим вычислением выходных значений контура, вычислением отдельно приращения к общему интегратору от каждого контура и дальнейшим последовательным сравнением выходных значений контуров друг с другом, при этом для регулирующих и верхних ограничительных контуров в качестве активных выбирают тот контур, выходное значение которого минимально, для нижних ограничительных контуров выбирают контур, выходное значение которого максимально, после чего выходное значение выбранного активного контура складывают с величиной, накопленной в общем интеграторе, а рассчитанное приращение от активного контура прибавляют к величине значения общего интегратора для последующих вычислений и вырабатывают согласованное управляющее воздействие. Данный способ позволяет повысить эффективность управления газотурбинным двигателем вблизи границ рабочего диапазона частот вращения, температуры продуктов сгорания и давления за компрессором, ресурс, эффективность и безопасность работы газотурбинного двигателя. Также улучшается способность системы управления противостоять возмущающим воздействиям по нагрузке и по изменению внешних условий. 6 ил.
Способ управления подачей топлива для газотурбинных двигателей, заключающийся в том, что измеряется частота вращения ротора газогенератора, частота вращения ротора свободной турбины, температура продуктов сгорания в газовоздушном тракте двигателя, давление за компрессором газогенератора и формируется управляющее воздействие на исполнительный орган - клапан, дозирующий подачу топлива в камеру сгорания, отличающийся тем, что величину управляющего воздействия определяют с помощью совокупности регулирующих и ограничительных контуров контура отрицательной обратной связи с адаптивным законом регулирования, при этом регулирующие контуры поддерживают заданную величину частоты вращения ротора газогенератора или частоты вращения ротора свободной турбины, а ограничительные контуры предупреждают аварийные ситуации, удерживая параметры двигателя в заданном диапазоне, в каждый момент времени в качестве управляющего воздействия выбирают значение выхода одного из контуров, выбор которого осуществляют селектором минимума-максимума как результат формирования ошибки регулирования в каждом контуре на основании текущих измерений физических величин с последующим вычислением выходных значений контура, вычислением отдельно приращения к общему интегратору от каждого контура и дальнейшим последовательным сравнением выходных значений контуров друг с другом, при этом для регулирующих и верхних ограничительных контуров в качестве активных выбирают тот контур, выходное значение которого минимально, для нижних ограничительных контуров, выбирают контур, выходное значение которого максимально, после чего выходное значение выбранного активного контура складывают с величиной, накопленной в общем интеграторе, а рассчитанное приращение от активного контура прибавляют к величине значения общего интегратора для последующих вычислений и вырабатывают согласованное управляющее воздействие.
| СПОСОБ УПРАВЛЕНИЯ РАБОТОЙ КОМПЛЕКСА ГАЗОТУРБИННЫХ КОМПРЕССОРНЫХ АГРЕГАТОВ | 2002 |
|
RU2219375C1 |
| СПОСОБ УПРАВЛЕНИЯ РАБОТОЙ КОМПЛЕКСА АГРЕГАТОВ КОМПРЕССОРНОГО ЦЕХА | 2001 |
|
RU2181854C1 |
| СПОСОБ УПРАВЛЕНИЯ МНОГОМЕРНЫМ ОБЪЕКТОМ | 2000 |
|
RU2172419C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ПАРАМЕТРОВ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2002 |
|
RU2221929C1 |
| ТКАНЬ С ПЕРЕПЛЕТЕНИЕМ ШИЛОВА | 2002 |
|
RU2228977C1 |
| US 4583360 А, 22.04.1986. | |||

