Изобретение относится к области спортивной подготовки, спортивной медицины, туризма и оборудования для отдыха, в том числе отдыха на воде.
Задача тренировки вестибулярного аппарата весьма сложна и индивидуальна, как описано в статье Зеленина Л.А. (см. Ученые записки университета им. П.Ф. Лесгафта, Выпуск №1 (95)/2013, а также http://cyberleninka.ru/article/n/tehnologiya-razvitiya-ravnovesiya-v-sopryazhyonnom-osvoenii-tehniki-grebli-u-nachinayuschih-grebtsov-s-pomoschyu-trenazhyorov), развитие навыков удержания равновесия требует времени и применения соответствующих методик.
Кроме того, в групповых видах спорта и туризма возникают как задачи ускоренной адаптации всех членов группы к задаче удержания равновесия на канате, доске, бревне, плавательном средстве, так и задачи прохождения таких препятствий всеми членами группы.
Иными словами, существует потребность в устройстве, которое позволило бы тренировать навыки балансирования, допускало индивидуальную настройку индикации, выбор режима индикации, который органичен именно для данного человека и его системы «зрение-мозг»; использовать этот режим в дальнейшем на устройствах, оснащенных такой индикацией, а по результатам настройки сделать выводы о своем "вестибулярном" типе и, например, о конкретной совокупности упражнений, которые помогут улучшить координацию данному индивидууму, или хотя бы выполнить конкретную задачу преодоления сложного препятствия.
Рассмотрим известные решения в данной области.
Известен патент США 8845556 (В1) - 2014-09-30, А61В 5/103; А61В 5/117; G08B 23/00, в котором описаны способ и устройство для поддержания баланса тела, однако речь идет о статическом балансе, походке и осанке, поэтому для решения вышеописанных задач данное решение неприменимо.
Известно также использование линейного индикатора уровня в весах (см. WO 0058697 - 2000-10-05; G01D 7/00; G01D 7/12; G01G 23/37; G01G 23/00). Устройство содержит дисплей из отдельных пикселей и контроллер, управляющий ими таким образом, что пиксели, образующие индикатор, располагаются вдоль двух осей и расположены всегда под одним углом к осям при движении. К недостаткам данного индикатора также следует отнести несоответствующую область применения: невозможность использования на воде, а главное - в динамике.
В патенте Великобритании 2482269 (2012-01-25; А63В 69/04; G09B 9/00) описан тренажер верховой езды, в котором шейная часть выполнена поворотной. Тренажер позволяет тренировать равновесие, будучи способным качаться по двум осям, и может иметь сенсорные датчики для реакции на поведение пользователя. Однако к его недостаткам также следует отнести ограниченную область применения и то обстоятельство, что тренирующийся не имеет перед собой индикатора, показывающего успешность его действий, что существенно замедляет процесс тренировки или адаптации.
Известен также велотренажер по патенту США 2010216103 (26.08.2010, А63В 69/00). Поворотные части позволяют начинающему спортсмену тренировать на нем устойчивость, однако оба вышеуказанных недостатка свойственны ему в полной мере.
В патенте РФ №2461404 (2011-05-31, А63В 69/06) описан тренажер-каноэ. Тренажер содержит площадку для размещения спортсмена, установленную на опорах, выполненных в виде полуовалов, по контуру повторяющих поперечные обводы спортивной лодки. Опоры носовой и кормовой частей расположены на равном расстоянии друг от друга, к верхней части опор и к носовой и кормовой частям снаружи прикреплены трубы, соединенные между собой, образуя борта лодки-каноэ. Тренажер снабжен основными и дополнительными скользящими полозьями, причем основные скользящие полозья прикреплены к опорам, расположены на некотором расстоянии друг от друга и в носовой и кормовой частях приварены к трубам, а дополнительные скользящие полозья прикреплены к опорам носовой и кормовой частям, расположены по бокам основных полозьев и выше их. Имитатор весла выполнен в виде стержня, на опорном конце стержень соединен с четырьмя вилообразными заостренными на концах зубьями, выполненными в форме крюков. Кроме того, к кормовой части тренажера прикреплено средство для удержания равновесия. Технический результат заключается в повышении эффективности тренировки функции равновесия гребцов с одновременным освоением техники гребковых движений путем максимального приближения к естественным условиям гребли на воде.
Основной недостаток данного устройства по существу тот же - глаза спортсмена устремлены, фактически, в пол, и формирование навыков удержания равновесия опирается только на внутренние ощущения и происходит медленно.
Наиболее близким к предложенному является тренажер для развития навыков удержания равновесия преимущественно для серфингистов, скейтбордистов, слаломистов и т.п. по WO 2004098723 (18.11.2004, А63В 26/00; А63В 69/00; А63В 22/14). Тренажер содержит неподвижное основание и подвижные элементы: цилиндрическую вставку и доску с выемкой на нижней поверхности и позволяет балансировать «по двум осям» в условиях, приближенных к реальным.
Недостатком данного тренажера также является то обстоятельство, что глаза спортсмена практически не участвуют в формировании навыков удержания равновесия, "цепь обратной связи" не работает или используется не полностью, и формирование навыков происходит недостаточно эффективно, а кроме того, известное решение не допускает настройки на индивидуальные свойства вестибулярного аппарата пользователя, что делает неэффективным и его использование для ускоренной адаптации группы к решению задач, связанных с балансированием, удержанием равновесия.
Таким образом, техническим результатом, ожидаемым от использования изобретения, является повышение эффективности тренажера за счет настройки на индивидуального пользователя и иного характера формирования обратной связи зрение-мозг-мышцы, а также расширение функциональных возможностей за счет возможности использования в качестве вспомогательного средства при выполнении сложных заданий на удержание равновесия.
Указанный результат достигается тем, что известный тренажер для развития навыков удержания равновесия и средство, облегчающее удержание равновесия, содержащий по меньшей мере один элемент, выполненный с возможностью изменения своего углового положения вместе с опорными конечностями пользователя, дополнительно снабжен последовательно соединенными датчиком наклона, контроллером и шкалой, при этом по меньшей мере шкала установлена на поперечном основании, которое выполнено с возможностью изменения своего углового положения вместе с опорными конечностями пользователя и кинематически связанным с подвижным основанием или спортивным снарядом и размещено в поле зрения пользователя, причем шкала выполнена с возможностью отображения изменения углового положения поперечного основания.
Кроме того, контроллер и шкала могут быть выполнены с возможностью отображения как текущего углового положения поперечного основания, так и его угловой скорости или ускорения.
При этом датчик наклона и шкала могут быть выполнены двухосными.
Кроме того, контроллер может быть выполнен с возможностью приема и вывода на шкалу информации о степени задействованности активной системы угловой стабилизации подвижного основания или спортивного снаряда.
Целесообразно также выполнить контроллер с возможностью хранения информации об оптимальном положении частей тела пользователя для каждого углового положения поперечного основания и его угловой скорости или ускорения и выработки и формирования на шкале заданий, указаний и рекомендаций пользователю.
Кроме того, тренажер может быть снабжен видеокамерой, обращенной к пользователю, выход которой подключен ко входу контроллера, который выполнен с возможностью хранения информации об оптимальном положении частей тела пользователя для каждого углового положения поперечного основания и его угловой скорости или ускорения, сопоставления этой информации с информацией, содержащейся в выходном сигнале видеокамеры, и выработки и формирования на шкале заданий, указаний и рекомендаций пользователю с учетом его движений и состояния.
При этом контроллер может быть выполнен с возможностью регистрации и учета специфики глазодвигательной активности пользователя, в соответствии с которой на шкалу передается сигнал тревоги или модифицируются задания, указания и рекомендации.
Целесообразно также снабдить тренажер механизмом дестабилизации и/или средствами создания помех зрению, в частности средствами динамической подсветки окружающего фона или проецирования изображений.
Кроме того, кинематическая связь поперечного основания с подвижным основанием или спортивным снарядом может быть реализована путем выполнения поперечного основания в виде мобильного средства отображения, пригодного для закрепления на теле, на руке или удержания в руке.
При этом контроллер может быть выполнен с выходным излучателем звука, параметры которого зависят от углового положения поперечного основания, его угловой скорости и/или ускорения.
И, наконец, контроллер может быть выполнен с возможностью приема внешней информации об окружающей среде и вывода ее на шкалу.
Таким образом, сущность изобретения заключается в том, что имеется основание, расположенное поперечно условному направлению движения (для спортивного снаряда направление движения не носит условный характер, а для тренажера оно имеет условный характер) и подвижному основанию или спортивному снаряду, смотря по тому, на чем оно закреплено. Это поперечное основание может быть выполнено в виде гибкой ленты, планшета, полосы, причем оно и установленная на нем шкала могут выполняться герметичными, если используются на воде. Поперечное основание кинематически связано с подвижным, то есть либо закреплено на нем, либо вмонтировано в него, либо связано через пользователя, ноги которого стоят на подвижном основании или спортивном снаряде, а поперечное основание он держит в руке, например.
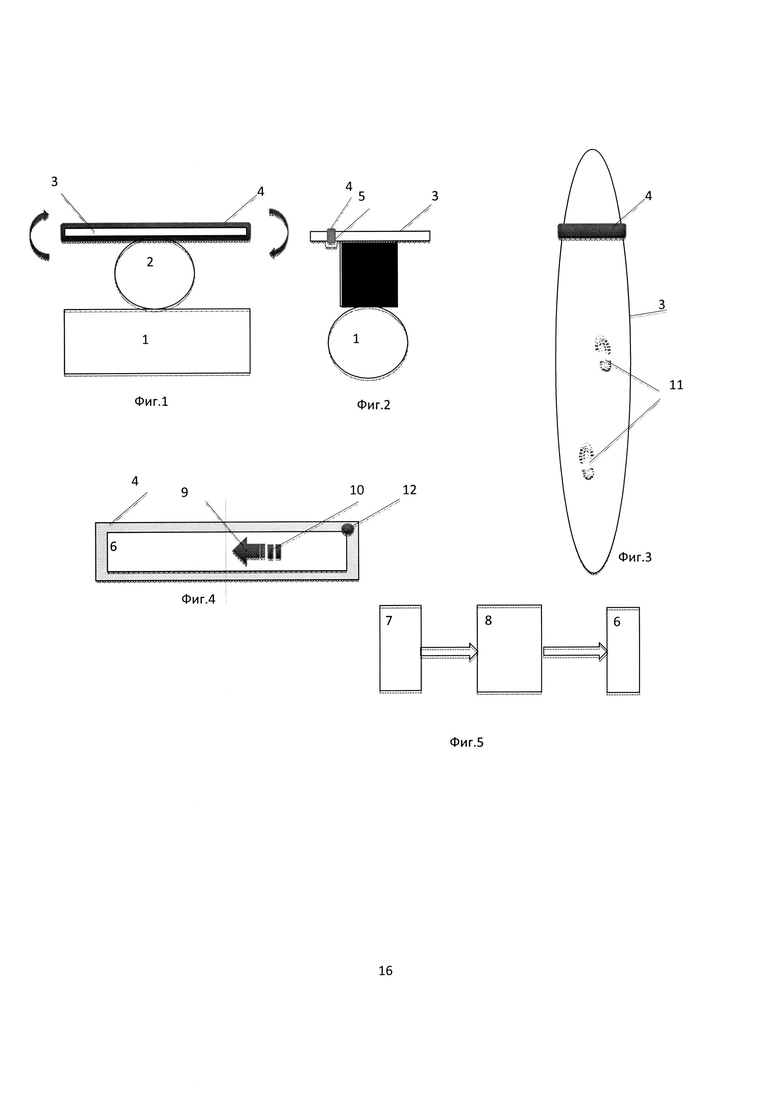
На фиг. 1-5 показан пример реализации тренажера. В показанном на фиг. 1-5 варианте на полу или неподвижном основании (не показаны) располагаются друг на друге цилиндры 1, 2 (фиг. 1, 2 - фронтальная проекция и вид сбоку) и подвижное основание 3, на свободном конце которого располагается поперечное основание 4, выполненное, например, в виде упругой гибкой ленты с застежкой 5 и с шкалой 6. Элементы 1-3 установлены таким образом, что подвижное основание 3 имеет возможность наклоняться в поперечном (для пользователя и относительно оси подвижного основания 3) направлении.
Блок-схема устройства (фиг. 5) включает последовательно соединенные датчик наклона 7, контроллер 8 и шкалу 6. Информация от датчика наклона 7 поступает на контроллер 8, который на шкале (дисплее) 6 формирует фигуры, символы, знаки, указывающие на текущее значение и направление крена подвижного основания 3 (стрелка 9 на фиг. 5) и направление и величину первой (шлейф 10 стрелки 9) и/или второй производной (не показана) наклона подвижного основания 3. При этом обозначение величины, направления наклона и его производных условно и может отображаться любым заранее обусловленным образом. Датчик наклона 7, при необходимости вывода на шкалу 6 угловой скорости или ускорения, выполняется с возможностью формирования сигналов, пропорциональных указанным величинам. Соответствующие стрелка и шлейф могут располагаться на шкале 6 перпендикулярно стрелке 9 и шлейфу 10 (не показаны).
Итак, в описанном варианте (фиг. 1, 2) подвижное основание 3 установлено на цилиндрах 1 и 2, так что вместе с опорными конечностями пользователя 11 (фиг. 3) свое положение меняют и подвижное основание 3, и шкала 6. Если же мы имеем дело с тренажером в виде спортивного снаряда (доски) 3, находящегося на воде, то есть если тренировка происходит в реальных условиях, вместе с опорными конечностями пользователя свое положение меняет только шкала 6. Данный вариант собственно и показан на фиг. 3.
Возможность закрепления шкалы 6 (поперечного основания 4) на подвижном основании 3, как уже отмечалось, может быть реализована не только с помощью застежки 5, но и с помощью зажимов, винтовых соединений и т.п. Говоря же о том, что на поперечном основании 4 может быть закреплена не только шкала 6, мы имеем в виду, что датчик наклона 7 и контроллер 8 могут располагаться как на поперечном основании 4, так и вне его, на подвижном основании 3, а контроллер 8 еще и на неподвижном основании и т.д., причем в этом случае связь контроллера 8 с датчиком 7, если они установлены в различных местах, или контроллера 8 и шкалы 6 осуществляется беспроводными средствами с использованием известных протоколов и средств.
В результате в поле зрения пользователя оказывается не только водная поверхность, пол или иное окружающее пространство, а шкала 6, закрепленная на поперечном основании 4.
Организм человека, находясь в сложных для вестибулярного аппарата условиях, использует одновременно три системы стабилизации: вестибулярный аппарат, зрительную привязку к опорным точкам и мышечную систему. Специфика балансирования на плавательной доске SUP или имитирующем ее тренажере (подвижном основании 3, имеющем возможность наклоняться в поперечном направлении, вокруг продольной оси и однородной или меняющейся окружающей фоновой подсветки) заключается в том, что для второй системы не находится удачных естественных информативных и эффективных с точки зрения удержания равновесия точек привязки (вода слишком однородна и нестабильна, а доска подвижна). В то же время третья система у неопытного спортсмена информационно перегружена непрерывным управлением мышцами. Хорошим выходом из создавшейся ситуации является создание специальных опорных сигналов для зрительной системы, причем таких, которые могли бы легко использоваться для создания мозгом на их базе нового контура управления с элементами предсказания - в помощь вестибулярному аппарату. Данную задачу и решает предложенное устройство (и размещать шкалу 6 в связи с этим целесообразно именно на подвижном основании 3, на доске, чтобы угол видения световых меток шкалы 6 мог являться дополнительным параметром такого комплексного регулятора). Поскольку показания шкалы 6 информативны и постоянно находятся перед глазами пользователя, последний быстро привыкает ориентироваться не на окружающие предметы или мышечные ощущения, а на указатели, формируемые контроллером 8 на шкале 6.
Если тренажер или спортивный снаряд снабжен системой активной угловой стабилизации, это, как правило, все равно не исключает необходимость балансирования на подвижном основании или спортивном снаряде 3. Кроме того, перед тренирующимся может быть поставлена задача достижения минимальной задействованности активной системы угловой (поперечной) стабилизации. С этой целью один из информационных сигналов системы стабилизации, например сигнал управления двигателями, поступает на второй вход контроллера 8, второй выход которого соединен со вторым входом шкалы 6 и который формирует на шкале 6 наряду с информацией о текущем значении и производной угла наклона подвижного и поперечных оснований 3, 4 информацию о задействованности правого или левого двигателя, например, в виде двух ярких меток, правой и левой, размер которых или яркость пропорциональны сигналу, поступающему на вход соответствующего двигателя.
Таким образом, индикация (шкала 6) располагается в месте, удобном для обзора пользователем, и обеспечивает ему более информативные ориентиры в процессе удержания равновесия, балансирования, прежде всего в поперечном направлении. Целесообразно также выполнить контроллер с возможностью регулировки коэффициентов передачи и фазовых сдвигов каналов датчик наклона 7 - контроллер 8 - шкала 6, что обеспечит индивидуальную настройку тренажера в соответствии с особенностями вестибулярного аппарата пользователя.
Индикация, в соответствии с изложенным, работает в следующих режимах или их сочетаниях:
1) перемещающаяся метка, указывающая статический параметр бокового крена (при выводе данных на индикацию может быть применена фильтрация для получения нужной стабильности и инерционности изображения);
2) индикация динамических параметров углового перемещения (по первой и второй производной соответственно) может использоваться как дополнение к режиму 1 в виде шлейфа или стрелки, указывающей направление и динамику предсказываемого перемещения;
3) для досок и других спортивных снарядов, оснащенных системами активной стабилизации, может дополнительно индицироваться задействованность активной системы (вектор тяги моторов и т.п.); как, например, для плавающей доски по патенту РФ №149549.
Датчик наклона 7 может выполняться на базе акселерометра, датчика угловой скорости, ускорения и т.п. Разумеется, устройство включает интерфейс связи с системой управления стабилизацией (если таковая есть) и дистанционным пультом управления (если есть) и элемент питания (аккумулятор, солнечная батарея и т.п.).
В память контроллера 8 может быть заложена модель удержания равновесия в виде оптимальных движений конечностей, таза, плечевого пояса и головы при различных величинах крена и его производных. Эти данные могут выводиться в виде схематичной движущейся фигурки на шкалу 6. С этой целью информация от датчика наклона 7 поступает в контроллере 8 на блок формирования обращений в блок памяти, информация из блока памяти через интерфейс контроллера 8 выводится на шкалу 6.
Более того, на поперечном основании 4 может устанавливаться видеокамера (на фиг. 4 обозначенная позицией 12), обращенная к пользователю и фиксирующая его движения. Сигнал с камеры 12 поступает на третий вход контроллера 8, который помимо (или вместо) формирования модели движений пользователя на шкале 6 вышеописанным образом, сопоставляя реальное положение частей тела пользователя с модельным, хранящимся в памяти контроллера 8, формирует разностный сигнал и выводит его на шкалу 6. Таким образом, пользователь в данном варианте исполнения устройства получает уже конкретные указания по поддержанию равновесия и процесс обучения идет быстрее. Кроме того, поскольку в контроллер 8 поступает информация о характере движений пользователя в данный момент, контроллер получает возможность делать заключения о состоянии пользователя, используя при этом и информацию от других внешних устройств (см. ниже). Эти заключения могут использоваться для модификации заданий и рекомендаций в зависимости от состояния, например, если пользователь не успевает следовать рекомендациям, контроллер 8 может выбрать замедленный вариант движений.
Камера, направленная на пользователя (размещенная, например, в плоскости шкалы 6), оказывается, таким образом, способной фиксировать также глазодвигательную активность и мимику пользователя. Контроллер 8 выполняется в этом случае с возможностью анализа указанной активности и реагировать различным образом:
1) Контроллер 8, имея информацию о величине и направлении крена и его производных, а также о действиях пользователя, необходимых для удержания равновесия и реально им совершаемых, о направлении взгляда пользователя, может передавать на шкалу 6 или дополнительные средства сигнализации (динамик, вспышка) сигнал тревоги, привлекающий внимание пользователя к необходимости собраться, более интенсивно двигаться и т.п. Сигнал тревоги может формироваться также в контроллере 8 и выводиться на шкалу 6 или упомянутые дополнительные средства при превышении креном или его производными пороговых значений, хранящихся в памяти контроллера 8, задаваемых извне или формируемых контроллером 8 в зависимости от оценки навыков пользователя и его прогресса в обучении. Эти сведения контроллер может формировать по алгоритму, имитирующему действия тренера, например следующему: контроллер 8 в течение первого интервала фиксирует величину, характеризующую частоту и амплитуду колебаний поперечного основания 4 или подвижного основания 3 по показаниям датчика наклона 7, а затем в течение второго периода формирует сигнал тревоги или пониженную оценку при превышении той же характеристикой порога, составляющего некоторую долю от полученного в первом периоде значения и наоборот, выдает повышенную оценку при недостижении порога и т.п.
2) Дополнительно к указанной в п. 1 информации контроллер 8 может регистрировать нистагмические движения глаз и динамические параметры индикации адаптивно подстраивать под реакции зрения (например, снижать угловой диапазон перемещений или скорость движущейся метки в пользу других параметров индикации таких, как шлейф при движении, изменяемая яркость, цвет и т.п.). Таким образом, по нистагмам мы не только видим, когда пользователь попадает в замешательство и плохо воспринимает индикацию, но и наоборот, когда ситуация нормализовалась, т.е. человек удерживает ситуацию балансирования и взаимодействия с прибором при минимуме больших саккад и/или при устойчивом комплекте используемых нистагм (достаточно хорошо синхронизированных с динамическими пространственными параметрами индикации). То есть используется адаптивная система с обратной связью. Это же касается реакции контроллера на мимику лица и различные изменения в процессе проведения тренировок: слишком длительное время закрытые глаза, изменение частоты морганий, слишком сильное напряжение лицевых мышц и другие признаки, широко используемые психологами и хорошо определяемые при обработке видеоизображения, наряду с неуспешностью действий по балансированию, могут быть критерием изменения режима тренировки или даже ее прекращения.
При этом использование памяти контроллера 8 или внешней памяти данных для записи процесса балансирования в синхронизации с внешними факторами воздействия позволяет также производить более глубокий анализ процесса тренировки (или, например, реабилитации пациента с вестибулярными нарушениями), и на основании этого судить о динамике состояний испытуемого.
Как отмечено выше, тренажер может быть выполнен с выносом индикации на мобильный гаджет (браслет, экран часов и т.п.), либо вся индикация может являться частью изображения на большой экранной панели, встроенной, например, в поверхность доски или связанных с ней элементов. На такой панели при этом может изображаться местоположение на карте, параметры движения по маршруту, прогноз погоды, а также прогноз состояния окружающей водной поверхности или ее вид и динамика, полученные, например, с высокой точки обзора или, например, беспилотного летательного аппарата над акваторией; при этом могут помечаться опасные для спортсмена волны, а также вектора и параметры их перемещения.
Следует пояснить также, что, как отмечено выше, кинематическая связь подвижного основания 3 с поперечным основанием 4 и, следовательно, шкалой 6 может быть реализована через пользователя, если шкала 6, установленная в поперечном основании 4, закреплена на его руке или удерживается им в руке. Такая связь, как отмечено выше, может осуществляться и через нижний цилиндр 1, если шкала 6 установлена на стене или ином объекте вне тренажера. Далее, возможен вариант применения в тренажере двух шкал 6, одна из которых находится, скажем, в руке пользователя, а вторая - на поперечном основании 4, установленном на подвижном основании 3. При этом понятно, что по существу поперечное основание 4 выполняет роль корпуса шкалы 6 и в ряде случаев может отсутствовать, например, если в руке пользователя находится гаджет, дисплей которого и является шкалой 6, либо если сама шкала 6 выполнена с возможностью закрепления на подвижном основании 3.
Вариантов реализации шкалы 6, встроенной в поперечное основание 4, может быть множество, простейший выглядит следующим образом.
Цветные светодиоды RGB располагаются в силиконовой герметичной ленточке для крепления поперек доски серфа. Выбирая цветовую гамму, можно синтезировать одновременно различные световые метки, например:
- белый световой зайчик (все три цвета включены в данной группе точек) показывает отфильтрованный "статический" уровень бокового крена;
- шлейф-столбик из красных точек показывает производную угла, и его динамика - вторую производную, обрамляя белую метку крена в соответствующем направлении;
- желтые полоски по краям индикатора, справа и слева, меняясь по длине и яркости, показывают для системы, оснащенной движителями стабилизации, задействованность этих движителей, причем «нулем» может быть одна горящая точка на каждом краю, чтобы давать глазу постоянную геометрическую привязку, а при увеличении интенсивности работы движителя с этой стороны соответствующая метка увеличивается по площади или яркости.
Для такого варианта идеал выровненной по боковому крену доски серфа соответствует, например, трем ярким точкам на линейке индикатора: одной белой (или зеленой) в центре и двум желтым по краям. При динамичном крене вправо, например, белая точка перемещается на несколько позиций влево, оставляя справа от себя красный шлейф (или наоборот, опережающую стрелку слева), с длиной и/или яркостью, соответствующими "величине опасности", к чему (также справа, в данном случае) присоединяется увеличение яркости желтых меток работы двигателя.
Помимо световой индикации в некоторых случаях хороший результат может дать дополнительная звуковая сигнализация, для чего контроллер 8 дополняется излучателем звука. Вызвано это тем, что слуховая информация обрабатывается в своих отдельных отделах мозга, и построенные с ее помощью контуры управления обладают не меньшей эффективностью, чем использующие зрительную информацию - достаточно лишь обеспечить однозначность соответствия между параметрами балансирования и звуковыми сигналами. Так, например, тональность может определять направление и угол, а интенсивность или длительность - угловую скорость или ускорение. Однако к минусам такой сигнализации следует отнести то, что у многих людей она может вызывать повышенную утомляемость.
Следует отметить также, что для применения заявленного устройства в качестве тренажера шкала 6, или дополнительная к ней шкала, может размещаться также и на стене или на полу помещения, в котором тренажер установлен, в поле зрения спортсмена, и только датчик наклона 7 должен размещаться на поперечном основании 4, кинематически связанным с подвижным основанием 3, или непосредственно на подвижном основании 3, как и контроллер 8. При этом окружающее пространство вокруг тренажера должно представлять собой однородный или динамически меняющийся фон (по аналогии с поверхностью воды, например), не дающий возможности зрению зафиксироваться на опорных точках. Кроме того, для усложнения задачи балансирования на фон под основанием 4 и на окружающее пространство в поле зрения испытуемого могут проецироваться различные изображения (например, вид с высокого моста, здания и т.п.). Динамический сдвиг такой картинки, где глаз автоматически находит опорные точки, должен дополнительно провоцировать испытуемого и тренировать навык концентрации внимания исключительно на шкале 6 и использования своих ощущений лишь в сочетании с достоверными данными.
И, наконец, тренажер может быть снабжен механизмом, создающим дисбаланс (т.е. возмущающее воздействие), поскольку целесообразно иметь возможность менять степень сложности задания по балансированию, в том числе дозированно вводя внешние дестабилизирующие факторы, как для самого балансирования (дополнительные механические управляемые средства, например, последовательно соединенные генератор случайных чисел, цифроаналоговый преобразователь, линейный двигатель и тяга, вторым концом закрепленная на цилиндре 1 или 2) в сочетании с динамическим изменением фона, так и помехи или поправки в индикацию - например, для выяснения запасов по возможностям для данного испытуемого или спортсмена (только для случая тренажера и тренировок). В этом случае изменения глазодвигательной активности позволяют как подобрать индивидуально предельные режимы тренажера, оптимальные режимы индикации, так и убедиться в наличии запасов по возможностям человека для разных упражнений и, например, выставить оценку. Все необходимые средства для этого описаны выше.
Отметим также, что число возможных вариантов исполнения и применения заявленного устройства не ограничивается изложенными выше, а определяется всеми возможными сочетаниями указанных в соответствующих разделах и пунктах формулы элементов, средств, узлов и механизмов.
Так, с помощью предлагаемого тренажера может быть в ускоренном режиме на берегу проведена тренировка группы людей, которым предстоит впервые форсировать, например, водную преграду на плавательных досках SUP, причем после тренировки устройство с индивидуально подобранными режимами в виде гибкой шкалы, установленной поперек доски, может использоваться во время плавания, чем значительно облегчит процесс и сделает его значительно более безопасным для начинающих.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЛАВАТЕЛЬНОЕ СРЕДСТВО С ИНФОРМАЦИОННЫМ ДИСПЛЕЕМ | 2015 |
|
RU2594456C1 |
| Способ тренировки на проприоцептивном тренажере с биологической обратной связью по опорной реакции | 2020 |
|
RU2754954C1 |
| Способ оценки качества удержания вертикального положения | 2023 |
|
RU2833267C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ПОДЪЕМНОЙ СИЛЫ В ТРЕНАЖЕРАХ ИНЕРЦИОННОГО ТИПА | 2010 |
|
RU2414943C1 |
| ТРЕНАЖЕР-ТАНДЕМ ДЛЯ УСКОРЕННОГО РАЗВИТИЯ ПЛЕЧЕВОГО ПОЯСА | 2014 |
|
RU2578108C1 |
| ТРЕНАЖЕР ДЛЯ ГОРНОЛЫЖНИКОВ И СПОСОБ ТРЕНИРОВКИ НА НЕМ | 2020 |
|
RU2728086C1 |
| СПОРТИВНЫЙ ТРЕНАЖЕР ДЛЯ НАРАБОТКИ СКОРОСТНОЙ ВЫНОСЛИВОСТИ | 2014 |
|
RU2573290C1 |
| СПОРТИВНЫЙ МЕХАНИЧЕСКИЙ ТРЕНАЖЕР ДЛЯ РАЗВИТИЯ СКОРОСТИ ДВИЖЕНИЯ РУК | 2014 |
|
RU2561025C1 |
| УСТРОЙСТВО ДЛЯ ОБУЧЕНИЯ СПОРТСМЕНОВ СИЛОВОЙ БОРЬБЕ В ХОККЕЕ | 2016 |
|
RU2616579C1 |
| СПОРТИВНЫЙ СНАРЯД ДЛЯ ОТРАБОТКИ УДАРНЫХ И ЗАЩИТНЫХ ДЕЙСТВИЙ | 2014 |
|
RU2578110C1 |
Использование: в области спортивной подготовки, спортивной медицины, туризма и оборудования для отдыха, в том числе отдыха на воде. Сущность изобретения: тренажер для развития навыков удержания равновесия содержит по меньшей мере один элемент, выполненный с возможностью изменения своего углового положения вместе с опорными конечностями пользователя. Он снабжен последовательно соединенными датчиком наклона, контроллером и шкалой. Шкала установлена на поперечном основании, которое выполнено с возможностью изменения своего углового положения вместе с опорными конечностями пользователя и кинематически связанным с подвижным основанием или спортивным снарядом. Шкала размещена в поле зрения пользователя и выполнена с возможностью отображения изменения углового положения поперечного основания и индивидуальной настройкой режимов индикации. 10 з.п. ф-лы, 5 ил.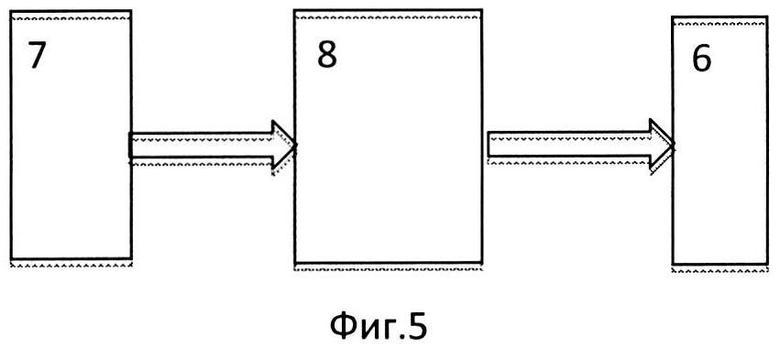
1. Тренажер для развития навыков удержания равновесия и средство, облегчающее удержание равновесия, содержащий по меньшей мере один элемент, выполненный с возможностью изменения своего углового положения вместе с опорными конечностями пользователя, отличающийся тем, что он дополнительно снабжен последовательно соединенными датчиком наклона, контроллером и шкалой, при этом по меньшей мере шкала установлена на поперечном основании, которое выполнено с возможностью изменения своего углового положения вместе с опорными конечностями пользователя и кинематически связанным с подвижным основанием или спортивным снарядом и размещено в поле зрения пользователя, причем шкала выполнена с возможностью отображения изменения углового положения поперечного основания.
2. Тренажер по п. 1, отличающийся тем, что контроллер и шкала выполнены с возможностью отображения как текущего углового положения поперечного основания, так и его угловой скорости или ускорения.
3. Тренажер по п. 1, отличающийся тем, что датчик наклона и шкала выполнены двухосными.
4. Тренажер по п. 1, отличающийся тем, что контроллер выполнен с возможностью приема и вывода на шкалу информации о степени задействованности активной системы угловой стабилизации подвижного основания или спортивного снаряда.
5. Тренажер по п. 1, отличающийся тем, что контроллер выполнен с возможностью хранения информации об оптимальном положении частей тела пользователя для каждого углового положения поперечного основания и его угловой скорости или ускорения, и выработки и формирования на шкале заданий, указаний и рекомендаций пользователю.
6. Тренажер по п. 1, отличающийся тем, что он снабжен видеокамерой, обращенной к пользователю, выход которой подключен ко входу контроллера, который выполнен с возможностью хранения информации об оптимальном положении частей тела пользователя для каждого углового положения поперечного основания и его угловой скорости или ускорения, сопоставления этой информации с информацией, содержащейся в выходном сигнале видеокамеры и выработки и формирования на шкале заданий, указаний и рекомендаций пользователю с учетом его движений и состояния.
7. Тренажер по п. 6, отличающийся тем, что контроллер выполнен с возможностью регистрации и учета специфики глазодвигательной активности пользователя, в соответствии с которой на шкалу передается сигнал тревоги или модифицируются задания, указания и рекомендации.
8. Тренажер по пп. 1-7, отличающийся тем, что он снабжен механизмом дестабилизации и/или средствами создания помех зрению, в частности средствами динамической подсветки окружающего фона или проецирования изображений.
9. Тренажер по пп. 1-7, отличающийся тем, что кинематическая связь поперечного основания с подвижным основанием или спортивным снарядом реализована путем выполнения поперечного основания в виде мобильного средства отображения, пригодного для закрепления на теле, на руке или удержания в руке.
10. Тренажер по п. 1, отличающийся тем, что контроллер выполнен с выходным излучателем звука, параметры которого зависят от углового положения поперечного основания, его угловой скорости и/или ускорения.
11. Тренажер по п. 1, отличающийся тем, что контроллер выполнен с возможностью приема внешней информации об окружающей среде и вывода ее на шкалу.
| US 20090227426 A1, 10.09.2009 | |||
| WO 2004098723 A1, 18.11.2004 | |||
| Устройство для обеспыливания волокнистого материала при его пневмотранспортировании | 1982 |
|
SU1074917A1 |
| ТРЕНАЖЕР-БАЛАНСИР | 2006 |
|
RU2311214C1 |

