Изобретение принадлежит к области обеспечения безопасности работ в горной промышленности и может использоваться для поиска и дистанционного контроля сердечного ритма персонала под/за завалами в шахтах.
Хорошо известны способы определения сердечного ритма человека, основанные на измерении его электрокардиограмм или с применением акустических средств измерений. Однако данные измерения предполагают применение стационарного оборудования и непосредственного контакта датчиков с телом человека. При производстве работ подобные способы определения сердечного ритма человека неприемлемы.
Существуют методы дистанционного контроля сердечного ритма человека, основанные на применении сверхширокополосной радиолокации, например "Détection of Human Breathing and Heartbeat by Remote Radar" (в трудах конференции "Progress in Electromagnetic Research Symposium", 2004, Pisa, Italy, March 28 - 31, - pp. 663-669), которые предполагают излучение микроволнового сигнала в направлении человека и прием отраженной волны, при этом отраженная волна содержит информацию о периодических изменениях в наполнении кровеносных сосудов человека. Однако определить сердечный ритм человека можно в этом случае за препятствием из кирпича 10 см толщиной или около того. Проконтролировать сердечный ритм человека, находящегося под/за завалом в этом случае не представляется возможным ввиду очень большого затухании микроволнового сигнала в горной породе, толщина которой может достигать нескольких метров или десятков метров.
Наиболее близким к предполагаемому изобретению относится "Способ поиска пострадавших под завалами", описанный в патенте Украины № 86558, опубл. в Бюл. № 8 от 27.04.2009.
По этому способу определения местоположения персонала шахты под/за завалами, каждого работника шахты снабжают радиомаяком, а поисковую группу снабжают устройством активации радиомаяков и устройствами поиска. При этом, в состав устройства активации вводят: первый генератор первой низкой частоты, первую неподвижную катушку с ферромагнитным сердечником. В состав радиомаяка вводят: неподвижные вторую и третью катушки с ферромагнитными сердечниками, узкополосный усилитель первой низкой частоты, детектор несущей, пороговое устройство, второй генератор второй низкой частоты. В состав трех поисковых устройств, по одному в каждый, вводят: подвижные катушки с ферромагнитными сердечниками, узкополосные усилители сигналов второй низкой частоты, выпрямители, измерители уровня.
По описанному способу с помощью первого генератора низкой частоты формируют низкочастотный гармонический сигнал с первой частотой, который подают на первую неподвижную катушку с ферромагнитным сердечником. Через эту первую катушку с ферромагнитным сердечником излучают в пространство переменное магнитное поле первой частоты. При этом первую катушку с ферромагнитным сердечником располагают в непосредственной близости от предполагаемого объекта поиска. Второй неподвижной катушкой с ферромагнитным сердечником радиомаяка это переменное магнитное поле первой частоты принимают и затем полученный низкочастотный гармонический сигнал с первой частотой усиливают с помощью узкополосного усилителя первой низкой частоты радиомаяка, после чего усиленный низкочастотный сигнал подают на детектор несущей, где этот сигнал переменного тока выпрямляют. Далее выпрямленный сигнал подают на пороговое устройство, где сравнивают напряжение выпрямленного сигнала с некоторым пороговым уровнем и при превышении уровня выпрямленного сигнала этого порогового уровня включают второй генератор низкой частоты, на выходе которого формируют низкочастотный гармонический сигнал со второй частотой, который подают на третью неподвижную катушку с ферромагнитным сердечником. Через эту третью неподвижную катушку с ферромагнитным сердечником радиомаяка излучают в пространство переменное магнитное поле второй низкой частоты. Причем четвертой подвижной катушкой с ферромагнитным сердечником первого поискового устройства это переменное магнитное поле второй низкой частоты принимают и затем полученный низкочастотный гармонический сигнал со второй частотой усиливают с помощью первого узкополосного усилителя второй низкой частоты первого поискового устройства и выпрямляют с помощью первого выпрямителя первого поискового устройства, после чего выпрямленный сигнал постоянного тока подают на первый измеритель уровня первого поискового устройства. Причем пятой подвижной катушкой с ферромагнитным сердечником второго поискового устройства это переменное магнитное поле второй низкой частоты принимают и затем полученный низкочастотный гармонический сигнал со второй частотой усиливают с помощью второго узкополосного усилителя второй низкой частоты второго поискового устройства и выпрямляют с помощью второго выпрямителя второго поискового устройства, после чего выпрямленный сигнал постоянного тока подают на второй измеритель уровня второго поискового устройства. Причем шестой подвижной катушкой с ферромагнитным сердечником третьего поискового устройства это переменное магнитное поле второй низкой частоты принимают и затем полученный низкочастотный гармонический сигнал со второй частотой усиливают с помощью третьего узкополосного усилителя второй низкой частоты третьего поискового устройства и выпрямляют с помощью третьего выпрямителя третьего поискового устройства, после чего выпрямленный сигнал постоянного тока подают на третий измеритель уровня третьего поискового устройства.
При этом гармонические низкочастотные сигналы, которые вырабатывают первым и вторым низкочастотными генераторами делают различными по частоте. Этим обеспечивают развязку низкочастотных усилительных трактов радиомаяка и поискового устройства. При этом сами поисковые устройства располагают друг относительно друга на некотором известном расстоянии, причем поисковые устройства располагают не на одной линии. При этом вращают подвижные катушки поисковых устройств и добиваются максимальных показаний измерителей уровня. При этом измеряют уровни принимаемых сигналов всеми тремя измерителями всех трех поисковых устройств. Далее по измеренным уровням сигналов и калибровочным номограммам определяют расстояния от радиомаяка до каждого из трех поисковых устройств и далее, решая обычную тригонометрическую задачу, определяют азимуты радиомаяка от каждого из трех поисковых устройств.
Однако описанный способ позволяет производить только поиск человека под/за завалом и не позволяет определить состояние здоровья самого человека.
В тоже время крайне необходимо при производстве спасательных мероприятий контролировать состояние самого человека на предмет жив он или, к несчастью, уже нет. При этом в первую очередь целесообразно проводить спасательные мероприятия в тех случаях, когда есть надежда спасти жизнь человека.
В основу изобретения поставлена задача определения азимута и расстояния до человека, находящегося под/за завалом и поставлена задача дистанционного контроля его сердечного ритма. Она решается благодаря тому, что первоначально генерируют непрерывные низкочастотные колебания с частотой f1, причем эти колебания подают на клеммы первой неподвижной катушки с ферромагнитным сердечником и излучают тем самым переменное магнитное поле с частотой f1, при этом первую катушку с ферромагнитным сердечником располагают в непосредственной близости от предполагаемого объекта поиска, при этом переменное магнитное поле с частотой f1 улавливают второй неподвижной катушкой с ферромагнитным сердечником, которую устанавливают в радиомаяке объекта поиска, после чего сигнал, снимаемый с клемм второй катушки с ферромагнитным сердечником усиливают в узкой полосе частот, выпрямляют и оценивают его уровень, причем при превышении выпрямленного сигнала постоянного тока некоторого порогового уровня включают микроволновый датчик сердечного ритма, который также располагают в радиомаяке в непосредственной близости от тела человека, например, внутри коробки аккумуляторной батареи шахтерского фонаря, которую шахтеры носят на поясе, при этом микроволновую антенну ориентируют в направлении тела человека, и одновременно при этом начинают генерировать непрерывные низкочастотные колебания с частотой f2, которые подают на сигнальный вход амплитудного модулятора, при этом на модуляционный вход амплитудного модулятора подают сигнал с выхода микроволнового датчика сердечного ритма, при этом сигнал с выхода амплитудного модулятора подают на клеммы третьей неподвижной катушки с ферромагнитным сердечником, которую также располагают в радиомаяке объекта поиска, и излучают тем самым переменное магнитное поле с частотой f2, модулированное периодическим импульсным сигналом, соответствующим сокращениям сердечной мышцы человека, при этом переменное магнитное поле с частотой f2 улавливают четвертой подвижной катушкой с ферромагнитным сердечником, которую располагают в первом поисковом устройстве, причем это же переменное магнитное поле с частотой f2 улавливают пятой подвижной катушкой с ферромагнитным сердечником, которую располагают во втором поисковом устройстве, причем это же переменное магнитное поле с частотой f2 улавливают шестой подвижной катушкой с ферромагнитным сердечником, которую располагают в третьем поисковом устройстве, причем сами поисковые устройства располагают друг относительно друга на некотором известном расстоянии, причем поисковые устройства располагают не на одной линии, при этом в каждом из трех поисковых устройств производят узкополосное усиление и выпрямление с большой постоянной времени принимаемых подвижными катушками низкочастотных сигналов, причем в каждом из трех поисковых устройств выпрямленный с большой постоянной времени сигнал постоянного тока подают на измеритель уровня сигнала, при этом в каждом из трех поисковых устройств вращают подвижные катушки с ферромагнитными сердечниками: в первом поисковом устройстве - четвертую катушку, во втором - пятую, в третьем - шестую, при этом в каждом из трех поисковых устройств осуществляют измерение уровня принятого, усиленного и выпрямленного с большой постоянной времени низкочастотного сигнала, при этом добиваются появления в каждом из трех поисковых устройств максимального уровня измеренного сигнала, после чего в каждом их трех поисковых устройств эти измеренные уровни сигналов по калибровочным номограммам переводят в расстояния до объекта поиска, при этом получают три расстояния до объекта поиска от каждого их трех поисковых устройств, после чего решают обычную тригонометрическую задачу и от каждого из поисковых устройств получают однозначно азимут объекта поиска, при этом в одном из трех поисковых устройств осуществляют выпрямление с малой постоянной времени низкочастотного сигнала, принятого его подвижной катушкой и усиленного его узкополосным усилителем, при этом получают импульсный периодический сигнал, соответствующий периодическим сокращениям сердечной мышцы человека, который подают на индикатор состояния здоровья человека, при этом контролируют состояние здоровья человека и используют один из полученных азимутов и расстояние до объекта поиска для осуществления спасательных мероприятий от того поискового устройства, от которого производить спасательные мероприятия наиболее эффективно.
Сравнение предполагаемого изобретения с уже известными способами и прототипом показывает, что заявляемый способ проявляет новые технические свойства, заключающиеся в возможности одновременного определения азимута и дальности до человека, находящегося под/за завалом горных пород, а также определения состояния его здоровья.
Эти свойства предполагаемого изобретения являются новыми, так как в способе-прототипе в силу присущих ему недостатков, заключающихся в возможности определения только азимута и дальности объекта поиска, установить состояние здоровья человека не представляется возможным.
В предлагаемом способе поиска людей под завалами горных пород каждого человека из числа персонала шахты снабжают радиомаяком, совмещенным с датчиком сердечного ритма. В случае аварии поиск пострадавших осуществляет специальная группа спасателей, которую снабжают поисковым оборудованием, состоящим из четырех частей. Поисковое оборудование состоит из устройства активации радиомаяков и трех поисковых устройств, в одном из которых установлен индикатор состояния человека. Устройство активации предназначено для излучения переменного магнитного поля с частотой f1. Состоит устройство активации из генератора непрерывных низкочастотных колебаний с частотой f1требуемой мощности и неподвижной катушки с ферромагнитным сердечником. Располагают устройство активации в непосредственной близости от места проведения спасательных мероприятий. Мощность излучения переменного магнитного поля должна быть достаточной для того, чтобы это переменное магнитное поле можно было бы принять радиомаяками, находящимися в зоне проведения спасательных мероприятий. В каждом из радиомаяков это переменное магнитное поле принимают, усиливают и оценивают его уровень. При превышении этого уровня некоторого порогового значения в радиомаяке включают микроволновый датчик сердечного ритма, который располагают в радиомаяке в непосредственной близости тела человека, и включают генератор непрерывных низкочастотных колебаний с частотой f2, т.е. осуществляют активацию радиомаяка. Эти низкочастотные колебания подают на сигнальный вход амплитудного модулятора. На модуляционный вход амплитудного модулятора подают сигнал с выхода микроволнового датчика сердечного ритма. Сигнал с выхода амплитудного модулятора подают на клеммы неподвижной катушки с ферромагнитным сердечником, которую располагают в радиомаяке, и излучают тем самым переменное магнитное поле с частотой f2, модулированное периодическим импульсным сигналом, соответствующим сокращениям сердечной мышцы человека. Это переменное магнитное поле с частотой f2 улавливают тремя подвижными катушками с ферромагнитными сердечниками трех поисковых устройств, в каждом своей катушкой. Принятые поисковыми устройствами сигналы усиливают в узкой полосе частот, выпрямляют с большой постоянной времени и подают на измерители уровня каждого из поисковых устройств. Далее осуществляют вращение подвижных катушек поисковых устройств и измеряют уровень принимаемого сигнала, при этом вращением катушек добиваются появления максимального уровня измеренного сигнала для каждого из поисковых устройств. При этом азимут объекта поиска не измеряют, поскольку в ближней зоне излучающей катушки с ферромагнитным сердечником этого сделать невозможно, поскольку совершенно невозможно предугадать в каком положении окажется излучающая катушка радиомаяка. При этом само положение излучающей катушки с ферромагнитным сердечником радиомаяка не имеет значения. Поскольку уровень принятого сигнала однозначно связан с расстоянием до источника излучения известной зависимостью, которую предварительно снимают и запоминают, то по измеренным уровням сигналов в каждом из поисковых устройств определяют три расстояния до радиомаяка от каждого из трех поисковых устройств соответственно. Поскольку взаимное расположение всех трех поисковых устройств известно, известны расстояния между ними и их азимуты друг относительно друга, то по полученным трем расстояниям от поисковых устройств до объекта поиска решают обычную тригонометрическую задачу и получают три азимута объекта поиска от каждого из трех поисковых устройств соответственно. Одновременно в одном из трех поисковых устройств принятый и усиленный низкочастотный сигнал выпрямляют с малой постоянной времени, в результате чего на выходе выпрямителя получают импульсный периодический сигнал, соответствующий сокращениям сердечной мышцы человека, сигнал радиомаяка которого принимают.
При проведении спасательных мероприятий сначала определяют азимуты и дальности всех людей, находящихся под/за завалом и при этом определяют состояния здоровья этих людей. Далее для поиска выбирают в первую очередь тех людей, которые еще живы, соответственно выбирают те азимуты и те расстояния до объектов поиска от тех поисковых устройств, от которых производить спасательные мероприятия наиболее эффективно.
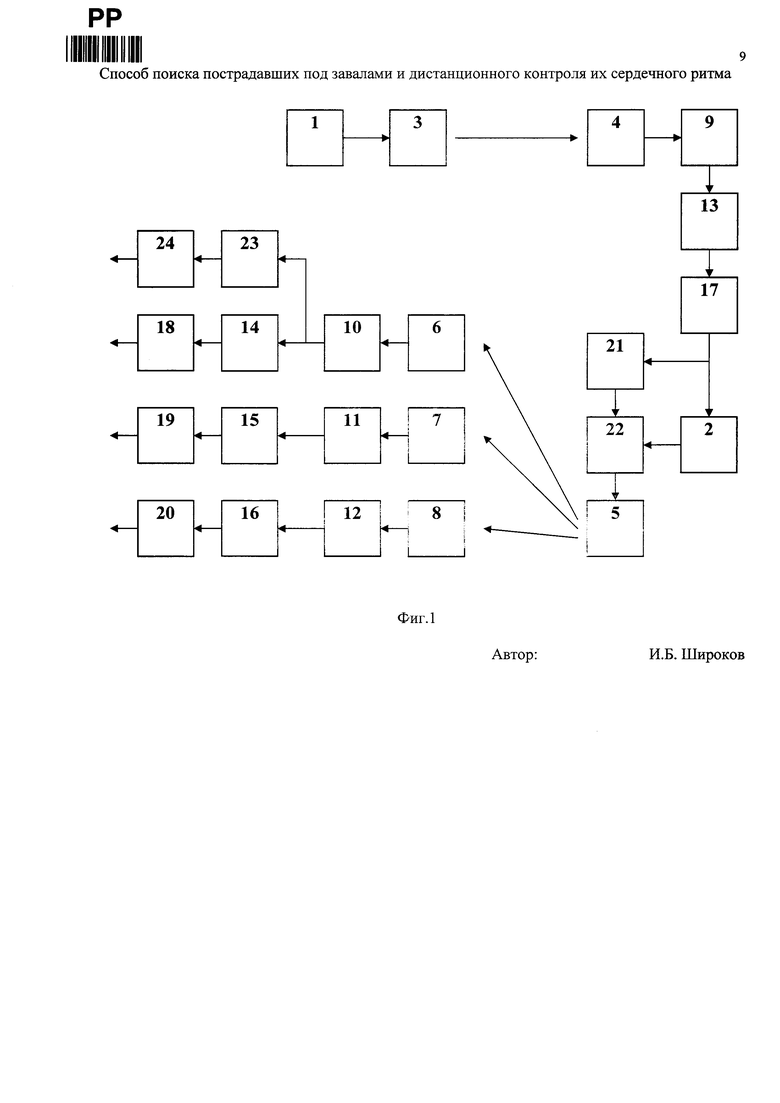
Указанный способ поиска пострадавших под завалами и дистанционного контроля их сердечного ритма можно реализовать с помощью устройства, приведенного на фиг. 1.
Устройство поиска пострадавших под завалами и дистанционного контроля их сердечного ритма состоит из устройства активации, радиомаяка, совмещенного с микроволновым датчиком сердечного ритма, и устройств поиска и содержит генераторы низкочастотных колебаний 1 и 2, неподвижные катушки с ферромагнитными сердечниками 3, 4 и 5 подвижные катушки с ферромагнитными сердечниками 6, 7 и 8, узкополосные усилители низкочастотных сигналов 9, 10, 11 и 12, выпрямители с большой постоянной времени 13, 14, 15 и 16, пороговое устройство 17, измерители уровня 18, 19 и 20, микроволновый датчик сердечного ритма 21, амплитудный модулятор 22, выпрямитель с малой постоянной времени 23, индикатор состояния здоровья человека 24.
Выход генератора низкочастотных колебаний 1 соединен с выводами неподвижной катушки с ферромагнитным сердечником 3, выводы неподвижной катушки с ферромагнитным сердечником 4 соединены с входом узкополосного усилителя низкочастотных сигналов 9, выход которого соединен с входом выпрямителя с большой постоянной времени 13, выход которого соединен с входом порогового устройства 17, выход которого соединен с входом управления низкочастотного генератора 2 и с входом управления микроволнового датчика сердечного ритма 21, причем выход низкочастотного генератора 2 соединен с сигнальным входом амплитудного модулятора 22, а выход микроволнового датчика сердечного ритма 21 соединен с модуляционным входом амплитудного модулятора 22, при этом выход амплитудного модулятора 22 соединен с выводами неподвижной катушки с ферромагнитным сердечником 5, при этом выводы подвижной катушки с ферромагнитным сердечником 6 соединены с входом узкополосного усилителя низкочастотных сигналов 10, при этом выводы подвижной катушки с ферромагнитным сердечником 7 соединены с входом узкополосного усилителя низкочастотных сигналов 11, при этом выводы подвижной катушки с ферромагнитным сердечником 8 соединены с входом узкополосного усилителя низкочастотных сигналов 12, при этом выход узкополосного усилителя низкочастотных сигналов 10 соединен с входом выпрямителя с большой постоянной времени 14, при этом выход узкополосного усилителя низкочастотных сигналов 11 соединен с входом выпрямителя с большой постоянной времени 15, при этом выход узкополосного усилителя низкочастотных сигналов 12 соединен с входом выпрямителя с большой постоянной времени 16, при этом выход выпрямителя с большой постоянной времени 14 соединен с входом измерителя уровня 18, при этом выход выпрямителя с большой постоянной времени 15 соединен с входом измерителя уровня 19, при этом выход выпрямителя с большой постоянной времени 16 соединен с входом измерителя уровня 20, при этом выход усилителя низкочастотных сигналов 10 соединен с входом выпрямителя с малой постоянной времени 23, а выход выпрямителя с малой постоянной времени 23 соединен с входом индикатора состояния здоровья человека 24.
Работает устройство, реализующее способ поиска пострадавших под завалами и дистанционный контроль их сердечного ритма следующим образом.
Генератор низкочастотных колебаний 1 формирует низкочастотные колебания с частотой f1 требуемой мощности, которые возбуждают с помощью неподвижной катушки с ферромагнитным сердечником 3 переменное низкочастотное магнитное поле с частотой f1. Это переменное низкочастотное магнитное поле улавливают неподвижной катушкой с ферромагнитным сердечником 4, которая входит в состав радиомаяка. Сигнал с выводов этой неподвижной катушки с ферромагнитным сердечником 4 подают на вход узкополосного усилителя низкочастотных сигналов 9, который также входит в состав радиомаяка, где принятый сигнал усиливают в узкой полосе частот, отделяя его от индустриальных помех, и подают на выпрямитель с большой постоянной времени 13, входящий в состав радиомаяка. Выпрямленный сигнал подают на вход порогового устройства 17, входящего в состав радиомаяка. При превышении принятого, усиленного и выпрямленного сигнала некоторого порогового уровня пороговое устройство срабатывает и включает микроволновый датчик сердечного ритма и одновременно включает генератор непрерывных низкочастотных колебаний 2, оба входящих в состав радиомаяка. Сигнал низкочастотного генератора поступает на сигнальный вход амплитудного модулятора, на модуляционный вход которого поступает сигнал с микроволнового датчика сердечного ритма. Амплитудный модулятор возбуждает с помощью неподвижной катушки с ферромагнитным сердечником 5, входящей в состав радиомаяка, переменное низкочастотное магнитное поле с частотой f2 заданной интенсивности, модулированное периодическим сигналом, соответствующим сокращению сердечной мышцы человека. Это переменное низкочастотное магнитное поле с частотой f2 улавливают подвижными катушками с ферромагнитными сердечниками 6, 7 и 8, входящими в состав трех поисковых устройств. Сигнал, наведенный на выводах i-той приемной подвижной катушки с ферромагнитным сердечником однозначно связан с расстоянием между приемной и передающей катушками следующей зависимостью 
где L - расстояние между катушками, м;
K - коэффициент пропорциональности, имеющий размерность В·м3, зависящий от амплитуды напряжения возбуждения передающей катушки, частоты возбуждения, числа витков обоих катушек, их диаметра, длины и проницаемости ферромагнитных сердечников;
φ0 - начальная фаза низкочастотных колебаний;
kAM - коэффициент, характеризующий глубину амплитудной модуляции;
s(t) - периодическая функция, характеризующая сокращения сердечной мышцы человека.
Приведенная формула справедлива при условии, когда катушки имеют максимальный коэффициент взаимной индукции. По этой причине важно произвести ориентацию подвижной катушки поисковой станции таким образом, чтобы принятый сигнал имел максимальный уровень.
Этот сигнал имеет малый уровень и присутствует на фоне индустриальных помех, имеющих как магнитную, так и радиочастотную природы. Эти помехи в шахтах хоть и имеют пониженный уровень, но присутствуют в любом случае.
По этой причине в каждой из поисковых станций производят узкополосное усиление принятого сигнала и отделение его от индустриальных помех с помощью узкополосных низкочастотных усилителей 10, 11 и 12, входящих в состав трех поисковых устройств.
Для измерения уровня принятого сигнала в поисковых станциях производят его выпрямление с помощью выпрямителей с большой постоянной времени 14, 15 и 16, входящих в состав трех поисковых устройств. Большая постоянная времени выпрямителей позволяет получить на их выходе сигнал постоянного тока, не содержащий частотных компонент периодической функции s(t).
Принятые, усиленные и выпрямленные сигналы подают на входы измерителей уровня 18,19 и 20, входящих в состав трех поисковых устройств.
Далее осуществляют вращение подвижных катушек поисковых устройств и измерение уровней принимаемых сигналов. При этом вращением подвижных катушек добиваются максимальных показаний измерителей уровня принимаемых сигналов. После того как получены максимальные значения измеренных уровней принятых сигналов по соответствующим номограммам определяют расстояния от каждой из подвижных катушек или от каждого из поисковых устройств до радиомаяка или объекта поиска.
Одновременно сигнал с выхода узкополосного низкочастотного усилителя 10 подают на вход выпрямителя с малой постоянной времени 23, на выходе которого получают выпрямленный сигнал постоянного тока, содержащий частотные компоненты периодической функции s(t), характеризующей сокращения сердечной мышцы человека. Этот периодический сигнал подают на индикатор состояния человека 24, с помощью которого оценивают состояние человека на предмет жив он или, к несчастью, уже нет.
Имея, таким образом, три определенных расстояния от каждого из трех поисковых устройств до объекта поиска, человека, находящегося под/за завалом соответственно, расстояния между поисковыми устройствами, которые известны заранее, азимуты каждого из поисковых устройств, друг относительно друга, которые также известны заранее, решают простую тригонометрическую задачу и получают, таким образом, три азимута объекта поиска от каждого из трех поисковых устройств соответственно и одновременно получают информацию о состоянии здоровья человека.
Для проведения спасательных мероприятий в первую очередь выбирают тех людей, находящихся под/за завалом, которые еще живы и выбирают тот азимут объекта поиска и, соответственно то расстояние до объекта поиска от того из поисковых устройств, от которого проводить спасательные мероприятия наиболее эффективно.
Таким образом получают координаты объекта поиска человека, находящегося под/за завалом и дистанционно контролируют его сердечный ритм.
Народнохозяйственный эффект от использования предполагаемого изобретения связан с появлением возможности быстро и точно определить координаты человека, находящегося под/за завалом горной породы и определить при этом состояние его здоровья по частоте его сердечного ритма. При этом появляется возможность оперативно организовать спасательные мероприятия и обеспечить, тем самым, в первую очередь сохранение жизни людей, находящихся под/за завалом и еще живых в лучшем случае, в худшем случае имеется возможность отыскать тела людей уже погибших в результате аварии.
При проведении спасательных мероприятий в большинстве случаев место аварии известно. В этих случаях можно обойтись только двумя поисковыми устройствами. При определении азимутов объекта поиска от двух поисковых устройств описанным способом возникает принципиальная неопределенность в определении азимута. При этом необходимо выбрать азимут от поискового устройства на объект поиска один из двух. Один из азимутов будет указывать на место завала, другой указывать на противоположное направление. Выбрать нужный азимут в этом случае можно организационно.
Способ поиска пострадавших под завалами и дистанционного контроля их сердечного ритма относиться к области обеспечения безопасности работ в горной промышленности и может использоваться для определения местоположения персонала под/за завалами в шахтах и одновременного контроля состояния их здоровья.
Новым в способе поиска пострадавших под завалами является снабжение всего персонала шахты радиомаяками, совмещенными с микроволновыми датчиками сердечного ритма и организация поисковой группы, которую снабжают устройством активации радиомаяков и устройствами поиска в количестве трех штук, одно из которых снабжают индикатором состояния здоровья человека.
Устройство активации возбуждает переменное низкочастотное магнитной поле с одной частотой и заданной мощности. Радиомаяком персонала шахты это переменное магнитное поле улавливают и при превышении этого поля некоторого порогового уровня радиомаяком включают микроволновый датчик сердечного ритма и возбуждают переменное низкочастотное магнитное поле с другой частотой, модулированное периодической функцией, соответствующей сокращениям сердечной мышцы человека. Подвижными катушками с ферромагнитными сердечниками поисковых устройств это переменное низкочастотное магнитное поле принимают, усиливают полученный на выходе катушек электрический сигнал и измеряют его уровень, который соответствует принятому переменному низкочастотному магнитному полю. Вращая подвижные катушки с электромагнитными сердечниками, добиваются получения максимальных показаний измерителя уровня. По измеренным уровням сигнала с помощью предварительно снятых номограмм определяют расстояние от каждого из поисковых устройств до радиомаяка. При известных расстояниях между самими поисковыми устройствами и известных азимутов самих поисковых устройств друг относительно друга, определяют азимуты радиомаяка или объекта поиска от каждого из поисковых устройств. Одновременно в одном из поисковых устройств выпрямляют с малой постоянной времени принятый и усиленный низкочастотный сигнал, модулированный периодической функцией, характеризующей сокращения сердечной мышцы человека. При этом оценивают состояние здоровья человека и выбирают тот азимут и расстояние до объекта поиска от того из поисковых устройств, от которого производить спасательные мероприятия наиболее эффективно.
Способ поиска людей под/за завалами и дистанционного контроля их сердечного ритма, включающий излучение и прием непрерывных низкочастотных колебаний, отличающийся тем, что первоначально генерируют непрерывные низкочастотные колебания с частотой f1, причем эти колебания подают на клеммы первой неподвижной катушки с ферромагнитным сердечником и излучают тем самым переменное магнитное поле с частотой f1, при этом первую катушку с ферромагнитным сердечником располагают в непосредственной близости от предполагаемого объекта поиска, при этом переменное магнитное поле с частотой f1 улавливают второй неподвижной катушкой с ферромагнитным сердечником, которую устанавливают в радиомаяке объекта поиска, после чего сигнал, снимаемый с клемм второй катушки с ферромагнитным сердечником усиливают в узкой полосе частот, выпрямляют и оценивают его уровень, причем при превышении выпрямленного сигнала постоянного тока некоторого порогового уровня включают микроволновый датчик сердечного ритма, который также располагают в радиомаяке в непосредственной близости от тела человека, например, внутри коробки аккумуляторной батареи шахтерского фонаря, которую шахтеры носят на поясе, при этом микроволновую антенну ориентируют в направлении тела человека, и одновременно при этом начинают генерировать непрерывные низкочастотные колебания с частотой f2, которые подают на сигнальный вход амплитудного модулятора, при этом на модуляционный вход амплитудного модулятора подают сигнал с выхода микроволнового датчика сердечного ритма, при этом сигнал с выхода амплитудного модулятора подают на клеммы третьей неподвижной катушки с ферромагнитным сердечником, которую также располагают в радиомаяке объекта поиска, и излучают тем самым переменное магнитное поле с частотой f2, модулированное периодическим импульсным сигналом, соответствующим сокращениям сердечной мышцы человека, при этом переменное магнитное поле с частотой f2 улавливают четвертой подвижной катушкой с ферромагнитным сердечником, которую располагают в первом поисковом устройстве, причем это же переменное магнитное поле с частотой f2 улавливают пятой подвижной катушкой с ферромагнитным сердечником, которую располагают во втором поисковом устройстве, причем это же переменное магнитное поле с частотой f2 улавливают шестой подвижной катушкой с ферромагнитным сердечником, которую располагают в третьем поисковом устройстве, причем сами поисковые устройства располагают друг относительно друга на некотором известном расстоянии, причем поисковые устройства располагают не на одной линии, при этом в каждом из трех поисковых устройств производят узкополосное усиление и выпрямление с большой постоянной времени принимаемых подвижными катушками низкочастотных сигналов, причем в каждом из трех поисковых устройств выпрямленный с большой постоянной времени сигнал постоянного тока подают на измеритель уровня сигнала, при этом в каждом из трех поисковых устройств вращают подвижные катушки с ферромагнитными сердечниками: в первом поисковом устройстве - четвертую катушку, во втором - пятую, в третьем - шестую, при этом в каждом из трех поисковых устройств осуществляют измерение уровня принятого, усиленного и выпрямленного с большой постоянной времени низкочастотного сигнала, при этом добиваются появления в каждом из трех поисковых устройств максимального уровня измеренного сигнала, после чего в каждом их трех поисковых устройств эти измеренные уровни сигналов по калибровочным номограммам переводят в расстояния до объекта поиска, при этом получают три расстояния до объекта поиска от каждого их трех поисковых устройств, после чего решают обычную тригонометрическую задачу и от каждого из поисковых устройств получают однозначно азимут объекта поиска, при этом в одном из трех поисковых устройств осуществляют выпрямление с малой постоянной времени низкочастотного сигнала, принятого его подвижной катушкой и усиленного его узкополосным усилителем, при этом получают импульсный периодический сигнал, соответствующий периодическим сокращениям сердечной мышцы человека, который подают на индикатор состояния здоровья человека, при этом контролируют состояние здоровья человека и используют один из полученных азимутов и расстояние до объекта поиска для осуществления спасательных мероприятий от того поискового устройства, от которого производить спасательные мероприятия наиболее эффективно.

