Изобретение принадлежит к области обеспечения безопасности работ в горной промышленности и может использоваться для определения местоположения персонала под завалами в шахтах.
Известны способы автоматизированного определения местоположения персонала, например "Унифицированная телекоммуникационная система УТАС" которая содержит кабель, сервер системы позиционирования, программное обеспечение системы (В книге "Способы и средства создания безопасных и здоровых условий труда в угольных шахтах", сборник научных трудов МакНИИ Макеевка, 2005 г. - с. 323-333) или "Система автоматизированного табельного учета и определения местоположения персонала и техники на шахтах и рудниках в комплексе "ТАЛ-НАХ", которая содержит: контроллеры, считыватели системы позиционирования, излучающий кабель, сервер системы позиционирования, программное обеспечение системы (В журнале "Оборудование для предприятий ТЭК" №8, М., 2006 г., опубл. 10.08.2006). Однако позиционирование объектов (персонала и транспортных средств) по этим системам осуществляется с точностью, обусловленной дискретностью установки считывателей системы позиционирования и реально составляет 100-200 м. Кроме того, система работает только в пределах прямой видимости объекта позиционирования и считывателя и практически непригодна в случае возникновения обвала горной породы, являющегося непреодолимым препятствием для радиосигналов с принятыми в описанных системах длинами волн.
Наиболее близким к предполагаемому изобретению относится "Метод поиска пострадавших при стихийных бедствиях", описанный в Материалах 14-й Международной Крымской микроволновой конференции (КрыМиКо'2004), 13-17 сентября, 2004, Севастополь, Украина.- с. 713-714.
По этому способу определения местоположения персонала шахты под завалами, каждого работника шахты снабжают радиомаяками, а поисковую группу снабжают устройством поиска. При этом в состав поискового прибора вводят: первый генератор низкой частоты, первую неподвижную магнитную антенну, узкополосный приёмник второй низкой частоты, индикатор и вращающуюся в горизонтальной плоскости четвертую магнитную антенну, которую снабжают устройством считывания ее положения. В состав радиомаяка вводят: неподвижные вторую и третью магнитные антенны, узкополосный усилитель первой низкой частоты, детектор несущей, пороговое устройство, второй генератор низкой частоты.
По описанному способу с помощью первого генератора низкой частоты формируют низкочастотный гармонический сигнал с первой частотой, который подают на первую магнитную антенну. Через эту первую магнитную антенну излучают в пространство первую низкочастотную радиоволну. Второй магнитной антенной эту первую низкочастотную радиоволну принимают и затем полученный низкочастотный гармонический сигнал с первой частотой усиливают с помощью узкополосного усилителя, после чего усиленный низкочастотный сигнал подают на детектор несущей, где этот сигнал переменного тока выпрямляют. Далее выпрямленный сигнал подают на пороговое устройство, где сравнивают напряжение выпрямленного сигнала с некоторым пороговым уровнем и при превышении уровня выпрямленного сигнала этого порогового уровня включают второй генератор низкой частоты, на выходе которого формируют низкочастотный гармонический сигнал со второй частотой, который подают на третью магнитную антенну. Через эту третью магнитную антенну излучают в пространство вторую низкочастотную радиоволну. Четвертой подвижной магнитной антенной эту вторую низкочастотную радиоволну принимают и затем полученный низкочастотный гармонический сигнал со второй частотой усиливают и выпрямляют с помощью узкополосного приёмника второй низкой частоты, после чего выпрямленный сигнал постоянного тока подают на индикатор. При этом гармонические низкочастотные сигналы, которые вырабатывают первый и вторым низкочастотными генераторами делают различными по частоте. Этим обеспечивают развязку низкочастотных усилительных трактов радиомаяка и поискового устройства. Поскольку диаграмма направленности магнитной антенны имеет форму "восьмёрки", то вращая четвертую магнитную антенну в горизонтальной плоскости по минимуму принимаемого этой антенной сигнала, который оценивают по индикатору, измеряют направление прихода второй низкочастотной радиоволны от радиомаяка, определяя тем самым азимут объекта поиска.
Однако описанный способ поиска людей под завалами имеет ряд существенных недостатков, не позволяющих использовать этот способ на практике.
Во-первых, поисковая антенна имеет диаграмму направленности в виде "восьмерки", имеющей два минимума. Отсюда появляется принципиальная неопределенность в определении азимута объекта поиска. Эта неопределенность составляет 180 градусов. Этот недостаток не является принципиальным, поскольку неопределенность поиска можно устранить организационными мерами: в большинстве случаев известно, где находится обвал горной породы, соответственно искать необходимо в направлении обвала, а никак не в противоположном направлении.
Во-вторых, поисковое устройство дает только азимут объекта поиска. Для эффективного поиска людей необходимо кроме азимута знать еще и расстояние до объекта поиска.
Третий недостаток имеет принципиальное значение и связан с рабочими длинами волн излучения поискового устройства и радиомаяка. Принимать во внимание характеристики диаграммы направленности магнитной антенны, работающей на прием, при определении азимута объекта поиска имеет смысл только в том случае, когда излучатель радиоволн находиться в дальней зоне поисковой антенны. В этом случае источник излучения можно рассматривать как точечный и все описанное выше справедливо. Дальняя зона в теории антенн определяется коэффициентом усиления самой антенны и рабочей длинной волны. В любом случае дальняя зона должна быть много больше длины волны излучения. В нашем случае рабочими частотами системы поиска можно считать частоты 100 кГц и ниже. Радиосигналы с большими частотами очень быстро затухают в толще горных пород, и производить поиск людей под завалами в этом случае не представляется возможным. Радиосигналы с указанными частотами и ниже способны проникать в толщу горных пород на большую глубину.
Для частоты 100 кГц длина волны излучения составляет 3000 м, соответственно дальняя зона для магнитных антенн начинается от 30 км и более. Для более низких частот эти расстояния еще больше. В то же время реальное значение расстояний поиска составляет 50-100 м. Таким образом, вся процедура поиска при использовании указанной рабочей длины волны осуществляется в ближней зоне приемных и передающих магнитных антенн и ни о каких их диаграммных характеристиках в этом случае говорить не приходится. В этом случае можно лишь говорить об индуктивной связи между катушками с ферромагнитными сердечниками, которые только при определенных условиях можно называть магнитными антеннами. Определять азимут объекта поиска путем вращения в горизонтальной плоскости приемной катушки с сердечником в этом случае бессмысленно, т.к. максимальный уровень сигнала на клеммах одной катушки и возбуждении другой и при наличии между ними индуктивной связи наблюдается как при соосном, так и при параллельном расположении катушек друг относительно друга. Предугадать же, как будет расположена магнитная антенна (катушка с сердечником) радиомаяка, не представляется возможным.
В тоже время крайне необходимо на небольших расстояниях решить задачу определения азимута объекта поиска и расстояния до него, т.е. производить поиск людей, находящихся под завалами горных пород. Большая смертность среди персонала угольных шахт обусловлена именно тем, что при существующем положении дел быстро отыскать пострадавших людей не представляется возможным. Эффективная аппаратура и методика поиска людей под завалами горных пород на сегодняшний день отсутствуют.
В основу изобретения поставлена задача определения азимута и расстояния до объекта поиска, находящегося в толще пород. Она решается благодаря тому, что первоначально генерируют непрерывные низкочастотные колебания с частотой f1, причем эти колебания подают на клеммы первой неподвижной катушки с ферромагнитным сердечником и излучают тем самым переменное магнитное поле с частотой f1, при этом первую катушку с ферромагнитным сердечником располагают в непосредственной близости от предполагаемого объекта поиска, при этом переменное магнитное поле с частотой f1 улавливают второй неподвижной катушкой с ферромагнитным сердечником, которую устанавливают в радиомаяке объекта поиска, после чего сигнал, снимаемый с клемм второй катушки с ферромагнитным сердечником усиливают в узкой полосе частот, выпрямляют и оценивают его уровень, причем при превышении выпрямленного сигнала постоянного тока некоторого порогового уровня начинают генерировать непрерывные низкочастотные колебания с частотой f2, которые подают на клеммы третьей неподвижной катушки с ферромагнитным сердечником, которую также располагают в радиомаяке объекта поиска, и излучают тем самым переменное магнитное поле с частотой f2, при этом переменное магнитное поле с частотой f2 улавливают четвертой подвижной катушкой с ферромагнитным сердечником, которую располагают в первом поисковом устройстве, причем это же переменное магнитное поле с частотой f2 улавливают пятой подвижной катушкой с ферромагнитным сердечником, которую располагают во втором поисковом устройстве, причем это же переменное магнитное поле с частотой f2 улавливают шестой подвижной катушкой с ферромагнитным сердечником, которую располагают в третьем поисковом устройстве, причем сами поисковые устройства располагают друг относительно друга на некотором известном расстоянии, причем поисковые устройства располагают не на одной линии, при этом в каждом из трех поисковых устройств производят узкополосное усиление и выпрямление принимаемых подвижными катушками низкочастотных сигналов, причем в каждом из трех поисковых устройств выпрямленный сигнал постоянного тока подают на измеритель уровня сигнала, при этом в каждом из трех поисковых устройств вращают подвижные катушки с ферромагнитными сердечниками: в первом поисковом устройстве - четвертую катушку, во втором - пятую, в третьем - шестую, при этом в каждом из трех поисковых устройств осуществляют измерение уровня принятого, усиленного и выпрямленного низкочастотного сигнала, при этом добиваются появления в каждом из трех поисковых устройств максимального уровня измеренного сигнала, после чего в каждом их трех поисковых устройств эти измеренные уровни сигналов по калибровочным номограммам переводят в расстояния до объекта поиска, при этом получают три расстояния до объекта поиска от каждого их трех поисковых устройств, после чего решают обычную тригонометрическую задачу и от каждого из поисковых устройств получают однозначно азимут объекта поиска, при этом используют один из полученных азимутов и расстояние до объекта поиска для осуществления спасательных мероприятий от того поискового устройства, от которого производить спасательные мероприятия наиболее эффективно.
Сравнение предполагаемого изобретения с уже известными способами и прототипом показывает, что заявляемый способ проявляет новые технические свойства, заключающиеся в возможности однозначного определения азимута и дальности до объекта поиска, находящегося в завале горных пород в пределах рабочих расстояний, которые реально в шахтах составляют 50-100 м.
Эти свойства предполагаемого изобретения являются новыми, так как в способе-прототипе в силу присущих ему недостатков, заключающихся в неоднозначности определения азимута объекта поиска, отсутствия данных о расстоянии до объекта поиска и принципиальной невозможности осуществлять поиск в пределах рабочих расстояний 50-100 м, проводить спасательные операции по поиску людей под обвалами горных пород в шахтах не представляется возможным.
В предлагаемом способе поиска людей под завалами горных пород каждого человека из числа персонала шахты снабжают радиомаяком. В случае аварии поиск пострадавших осуществляет специальная группа спасателей, которую снабжают поисковым оборудованием, состоящим из четырех частей. Поисковое оборудование состоит из устройства активации радиомаяков и трех поисковых устройств. Устройство активации предназначено для излучения переменного магнитного поля с частотой f1. Состоит устройство активации из генератора непрерывных низкочастотных колебаний с частотой f1 требуемой мощности и неподвижной катушки с ферромагнитным сердечником. Располагают устройство активации в непосредственной близости от места проведения спасательных мероприятий. Мощность излучения переменного магнитного поля должна быть достаточной для того, чтобы это переменное магнитное поле можно было бы принять радиомаяками, находящимися в зоне проведения спасательных мероприятий. В каждом из радиомаяков это переменное магнитное поле принимают, усиливают и оценивают его уровень. При превышении этого уровня некоторого порогового значения в радиомаяке включают генератор непрерывных низкочастотных колебаний с частотой f2, т.е. осуществляют активацию радиомаяка. Эти колебания подают на клеммы неподвижной катушки с ферромагнитным сердечником, которую располагают в радиомаяке, и излучают тем самым переменное магнитное поле с частотой f2. Это переменное магнитное поле с частотой f2 улавливают тремя подвижными катушками с ферромагнитными сердечниками трех поисковых устройств, в каждом своей катушкой. Принятые поисковыми устройствами сигналы усиливают в узкой полосе частот, выпрямляют и подают на измерители уровня каждого из поисковых устройств. Далее осуществляют вращение подвижных катушек поисковых устройств и измеряют уровень принимаемого сигнала, при этом вращением катушек добиваются появления максимального уровня измеренного сигнала для каждого из поисковых устройств. При этом азимут объекта поиска не измеряют, поскольку в ближней зоне излучающей катушки с ферромагнитным сердечником этого сделать невозможно, поскольку совершенно невозможно предугадать в каком положении окажется излучающая катушка радиомаяка. При этом само положение излучающей катушки с ферромагнитным сердечником радиомаяка не имеет значения. Поскольку уровень принятого сигнала однозначно связан с расстоянием до источника излучения известной зависимостью, которую предварительно снимают и запоминают, то по измеренным уровням сигналов в каждом из поисковых устройств определяют три расстояния до радиомаяка от каждого из трех поисковых устройств соответственно. Поскольку взаимное расположение всех трех поисковых устройств известно, известны расстояния между ними и их азимуты друг относительно друга, то по полученным трем расстояниям от поисковых устройств до объекта поиска решают обычную тригонометрическую задачу и получают три азимута объекта поиска от каждого из трех поисковых устройств соответственно. Для проведения спасательных мероприятий выбирают тот азимут и то расстояние до объекта поиска от того поискового устройства, от которого производить эти спасательные мероприятия наиболее эффективно.
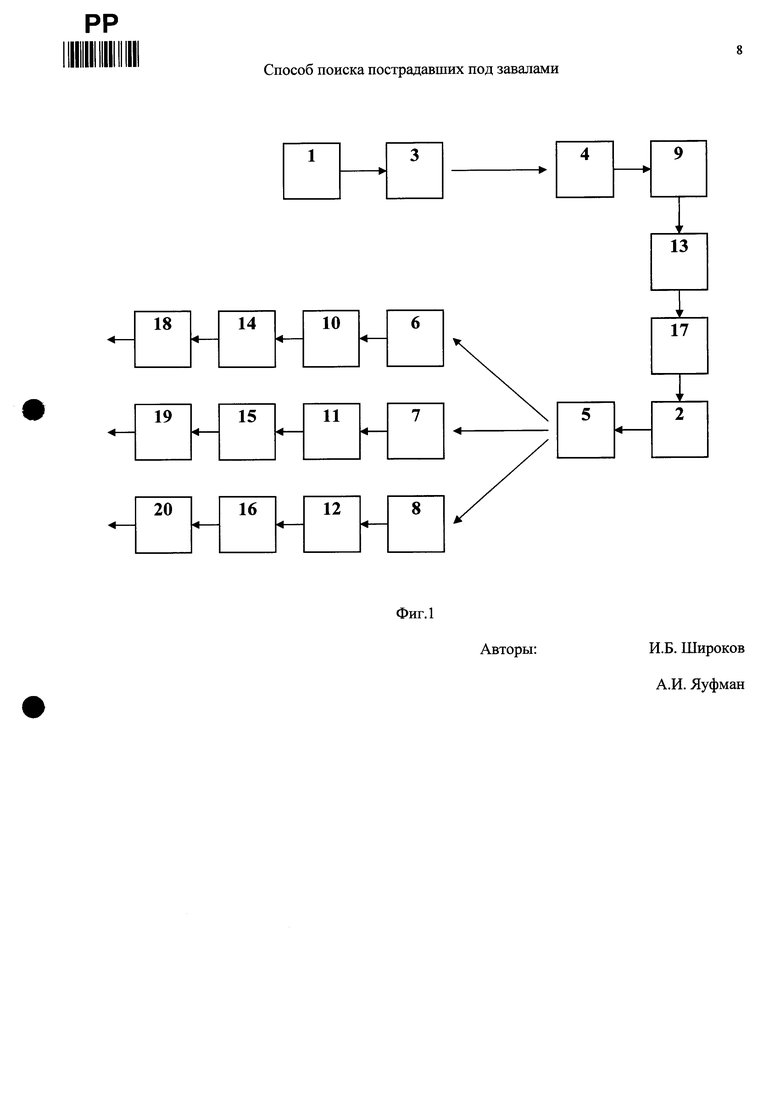
Указанный способ поиска пострадавших под завалами можно реализовать с помощью устройства, приведенного на фиг. 1.
Устройство поиска пострадавших под завалами состоит из устройства активации, радиомаяка и устройств поиска и содержит генераторы низкочастотных колебаний 1 и 2, неподвижные катушки с ферромагнитными сердечниками 3, 4 и 5 подвижные катушки с ферромагнитными сердечниками 6, 7 и 8, узкополосные усилители низкочастотных сигналов 9, 10, 11 и 12, выпрямители 13,14, 15 и 16, пороговое устройство 17, измерители уровня 18, 19 и 20.
Выход генератора низкочастотных колебаний 1 соединен с выводами неподвижной катушки с ферромагнитным сердечником 3, выводы неподвижной катушки с ферромагнитным сердечником 4 соединены с входом узкополосного усилителя низкочастотных сигналов 9, выход которого соединен с входом выпрямителя 13, выход которого соединен со входом порогового устройства 17, выход которого соединен с входом управления низкочастотного генератора 2, выход которого соединен с выводами неподвижной катушки с ферромагнитным сердечником 5, при этом выводы подвижной катушки с ферромагнитным сердечником 6 соединены с входом узкополосного усилителя низкочастотных сигналов 10, при этом выводы подвижной катушки с ферромагнитным сердечником 7 соединены с входом узкополосного усилителя низкочастотных сигналов 11, при этом выводы подвижной катушки с ферромагнитным сердечником 8 соединены с входом узкополосного усилителя низкочастотных сигналов 12, при этом выход узкополосного усилителя низкочастотных сигналов 10 соединен с входом выпрямителя 14, при этом выход узкополосного усилителя низкочастотных сигналов 11 соединен с входом выпрямителя 15, при этом выход узкополосного усилителя низкочастотных сигналов 12 соединен с входом выпрямителя 16, при этом выход выпрямителя 14 соединен с входом измерителя уровня 18, при этом выход выпрямителя 15 соединен с входом измерителя уровня 19, при этом выход выпрямителя 16 соединен с входом измерителя уровня 20.
Работает устройство, реализующее способ поиска пострадавших под завалами следующим образом.
Генератор низкочастотных колебаний 1 формирует низкочастотные колебания с частотой f1 требуемой мощности, которые возбуждают с помощью неподвижной катушки с ферромагнитным сердечником 3 переменное низкочастотное магнитное поле с частотой f1. Это переменное низкочастотное магнитное поле улавливают неподвижной катушкой с ферромагнитным сердечником 4, которая входит в состав радиомаяка. Сигнал с выводов этой неподвижной катушки с ферромагнитным сердечником 4 подают на вход узкополосного усилителя низкочастотных сигналов 9, который также входит в состав радиомаяка, где принятый сигнал усиливают в узкой полосе частот, отделяя его от индустриальных помех, и подают на выпрямитель 13, входящий в состав радиомаяка. Выпрямленный сигнал подают на вход порогового устройства 17, входящего в состав радиомаяка. При превышении принятого, усиленного и выпрямленного сигнала некоторого порогового уровня пороговое устройство срабатывает и включает генератор непрерывных низкочастотных колебаний 2, входящий в состав радиомаяка. Этот генератор непрерывных низкочастотных колебаний возбуждает с помощью неподвижной катушки с ферромагнитным сердечником 5, входящей в состав радиомаяка, переменное низкочастотное магнитное поле с частотой f2 заданной интенсивности. Это переменное низкочастотное магнитное поле с частотой f2 улавливают подвижными катушками с ферромагнитными сердечниками 6, 7 и 8, входящими в состав трех поисковых устройств. Сигнал, наведенный на выводах i-той приемной подвижной катушки с ферромагнитным сердечником однозначно связан с расстоянием между приемной и передающей катушками следующей зависимостью

где L - расстояние между катушками, м;
K - коэффициент пропорциональности, имеющий размерность В·м3, зависящий от амплитуды напряжения возбуждения передающей катушки, частоты возбуждения, числа витков обоих катушек, их диаметра, длины и проницаемости ферромагнитных сердечников;
φ0 - начальная фаза низкочастотных колебаний.
Приведенная формула справедлива при условии, когда катушки имеют максимальный коэффициент взаимной индукции. По этой причине важно произвести ориентацию подвижной катушки поисковой станции таким образом, чтобы принятый сигнал имел максимальный уровень.
Этот сигнал имеет малый уровень и присутствует на фоне индустриальных помех, имеющих как магнитную, так и радиочастотную природы. Эти помехи в шахтах хоть и имеют пониженный уровень, но присутствуют в любом случае.
По этой причине в каждой из поисковых станций производят узкополосное усиление принятого сигнала и отделение его от индустриальных помех с помощью узкополосных низкочастотных усилителей 10, 11 и 12, входящих в состав трех поисковых устройств.
Для измерения уровня принятого сигнала в поисковых станциях производят его выпрямление с помощью выпрямителей 14, 15 и 16, входящих в состав трех поисковых устройств.
Принятые, усиленные и выпрямленные сигналы подают на входы измерителей уровня 18, 19 и 20, входящих в состав трех поисковых устройств.
Далее осуществляют вращение подвижных катушек поисковых устройств и измерение уровней принимаемых сигналов. При этом вращением подвижных катушек добиваются максимальных показаний измерителей уровня принимаемых сигналов. После того как получены максимальные значения измеренных уровней принятых сигналов по соответствующим номограммам определяют расстояния от каждой из подвижных катушек или от каждого из поисковых устройств до радиомаяка или объекта поиска.
Имея, таким образом, три определенных расстояния от каждого из трех поисковых устройств до объекта поиска соответственно, расстояния между поисковыми устройствами, которые известны заранее, азимуты каждого из поисковых устройств, друг относительно друга, которые также известны заранее, решают простую тригонометрическую задачу и получают, таким образом, три азимута объекта поиска от каждого из трех поисковых устройств соответственно.
Для проведения спасательных мероприятий выбирают тот азимут объекта поиска и соответственно то расстояние до объекта поиска от того из поисковых устройств, от которого проводить спасательные мероприятия наиболее эффективно.
Таким образом получают координаты объекта поиска, человека, находящегося под завалом.
Народнохозяйственный эффект от использования предполагаемого изобретения связан с появлением возможности быстро и точно определить координаты человека, находящегося под завалом горной породы. При этом появляется возможность оперативно организовать спасательные мероприятия и обеспечить, тем самым, сохранение жизни людей в лучшем случае, в худшем случае имеется возможность отыскать тела людей уже погибших в результате аварии.
При проведении спасательных мероприятий в большинстве случаев место аварии известно. В этих случаях можно обойтись только двумя поисковыми устройствами. При определении азимутов объекта поиска от двух поисковых устройств описанным способом возникает принципиальная неопределенность в определении азимута. При этом необходимо выбрать азимут от поискового устройства на объект поиска один из двух. Один из азимутов будет указывать на место завала, другой указывать в противоположное направление. Выбрать нужный азимут в этом случае можно организационно.
Способ поиска пострадавших под завалами относиться к области обеспечения безопасности работ в горной промышленности и может использоваться для определения местоположения персонала под завалами в шахтах.
Новым в способе поиска пострадавших под завалами является снабжение всего персонала шахты радиомаяками и организация поисковой группы, которую снабжают устройством активации радиомаяков и устройствами поиска в количестве трех штук.
Устройство активации возбуждает переменное низкочастотное магнитной поле с одной частотой и заданной мощности. Радиомаяком персонала шахты это переменное магнитное поле улавливают и при превышении этого поля некоторого порогового уровня радиомаяком возбуждают переменное низкочастотное магнитное поле с другой частотой. Подвижными катушками с ферромагнитными сердечниками поисковых устройств это переменное низкочастотное магнитное поле принимают, усиливают полученный на выходе катушек электрический сигнал и измеряют его уровень, который соответствует принятому переменному низкочастотному магнитному полю. Вращая подвижные катушки с электромагнитными сердечниками, добиваются получения максимальных показаний измерителя уровня. По измеренным уровням сигнала с помощью предварительно снятых номограмм определяют расстояние от каждого из поисковых устройств до радиомаяка. При известных расстояниях между самими поисковыми устройствами и известных азимутов самих поисковых устройств друг относительно друга, определяют азимуты радиомаяка или объекта поиска от каждого из поисковых устройств. Выбирают тот азимут и расстояние до объекта поиска от того из поисковых устройств, от которого производить спасательные мероприятия наиболее эффективно.
Способ поиска людей под завалами, включающий излучение и прием непрерывных низкочастотных колебаний, отличающийся тем, что первоначально генерируют непрерывные низкочастотные колебания с частотой f1, причем эти колебания подают на клеммы первой неподвижной катушки с ферромагнитным сердечником и излучают тем самым переменное магнитное поле с частотой f1, при этом первую катушку с ферромагнитным сердечником располагают в непосредственной близости от предполагаемого объекта поиска, при этом переменное магнитное поле с частотой f1 улавливают второй неподвижной катушкой с ферромагнитным сердечником, которую устанавливают в радиомаяке объекта поиска, после чего сигнал, снимаемый с клемм второй катушки с ферромагнитным сердечником усиливают в узкой полосе частот, выпрямляют и оценивают его уровень, причем при превышении выпрямленного сигнала постоянного тока некоторого порогового уровня начинают генерировать непрерывные низкочастотные колебания с частотой f2, которые подают на клеммы третьей неподвижной катушки с ферромагнитным сердечником, которую также располагают в радиомаяке объекта поиска, и излучают тем самым переменное магнитное поле с частотой f2, при этом переменное магнитное поле с частотой f2 улавливают четвертой подвижной катушкой с ферромагнитным сердечником, которую располагают в первом поисковом устройстве, причем это же переменное магнитное поле с частотой f2 улавливают пятой подвижной катушкой с ферромагнитным сердечником, которую располагают во втором поисковом устройстве, причем это же переменное магнитное поле с частотой f2 улавливают шестой подвижной катушкой с ферромагнитным сердечником, которую располагают в третьем поисковом устройстве, причем сами поисковые устройства располагают друг относительно друга на некотором известном расстоянии, причем поисковые устройства располагают не на одной линии, при этом в каждом из трех поисковых устройств производят узкополосное усиление и выпрямление принимаемых подвижными катушками низкочастотных сигналов, причем в каждом из трех поисковых устройств выпрямленный сигнал постоянного тока подают на измеритель уровня сигнала, при этом в каждом из трех поисковых устройств вращают подвижные катушки с ферромагнитными сердечниками: в первом поисковом устройстве - четвертую катушку, во втором - пятую, в третьем - шестую, при этом в каждом из трех поисковых устройств осуществляют измерение уровня принятого, усиленного и выпрямленного низкочастотного сигнала, при этом добиваются появления в каждом из трех поисковых устройств максимального уровня измеренного сигнала, после чего в каждом их трех поисковых устройств эти измеренные уровни сигналов по калибровочным номограммам переводят в расстояния до объекта поиска, при этом получают три расстояния до объекта поиска от каждого их трех поисковых устройств, после чего решают обычную тригонометрическую задачу и от каждого из поисковых устройств получают однозначно азимут объекта поиска, при этом используют один из полученных азимутов и расстояние до объекта поиска для осуществления спасательных мероприятий от того поискового устройства, от которого производить спасательные мероприятия наиболее эффективно.

