Изобретение принадлежит к области обеспечения безопасности работ в горной промышленности и может использоваться для определения местоположения персонала под завалами в шахтах.
Известны способы автоматизированного определения местоположения персонала, например "Унифицированная телекоммуникационная система УТАС" которая содержит кабель, сервер системы позиционирования, программное обеспечение системы (В книге "Способы и средства создания безопасных и здоровых условий труда в угольных шахтах", сборник научных трудов МакНИИ Макеевка, 2005 г. - с. 323-333) или "Система автоматизированного табельного учета и определения местоположения персонала и техники на шахтах и рудниках в комплексе "ТАЛНАХ", которая содержит: контроллеры, считыватели системы позиционирования, излучающий кабель, сервер системы позиционирования, программное обеспечение системы (В журнале "Оборудование для предприятий ТЭК" №8, М., 2006 г., опубл. 10.08.2006). Однако позиционирование объектов (персонала и транспортных средств) по этим системам осуществляется с точностью, обусловленной дискретностью установки считывателей системы позиционирования и реально составляет 100-200 м. Кроме того, система работает только в пределах прямой видимости объекта позиционирования и считывателя и практически непригодна в случае возникновения обвала горной породы, являющегося непреодолимым препятствием для радиосигналов с принятыми в описанных системах длинами волн.
Наиболее близким к предполагаемому изобретению относится "Способ поиска пострадавших под завалами", описанный в патенте Украины № 87642, опубл. 27.07.2009 бюл. №14.
По этому способу определения местоположения персонала шахты под завалами, каждого работника шахты снабжают радиомаяком, а поисковую группу снабжают устройством активации радиомаяков и устройствами поиска. При этом в состав устройства активации вводят: первый генератор первой низкой частоты, первую неподвижную катушку с ферромагнитным сердечником. В состав радиомаяка вводят: неподвижные вторую и третью катушки с ферромагнитными сердечниками, узкополосный усилитель первой низкой частоты, детектор несущей, пороговое устройство, второй генератор второй низкой частоты. В состав трех поисковых устройств, по одному в каждый, вводят: подвижные катушки с ферромагнитными сердечниками, узкополосные усилители сигналов второй низкой частоты, выпрямители, индикаторы уровня принимаемых сигналов, измерители азимута положения подвижных катушек с ферромагнитными сердечниками.
По описанному способу с помощью первого генератора низкой частоты формируют низкочастотный гармонический сигнал с первой частотой, который подают на первую неподвижную катушку с ферромагнитным сердечником. Через эту первую катушку с ферромагнитным сердечником излучают в пространство переменное магнитное поле первой частоты. При этом первую катушку с ферромагнитным сердечником располагают в непосредственной близости от предполагаемого объекта поиска. Второй неподвижной катушкой с ферромагнитным сердечником радиомаяка это переменное магнитное поле первой частоты принимают и затем полученный низкочастотный гармонический сигнал с первой частотой усиливают с помощью узкополосного усилителя первой низкой частоты радиомаяка, после чего усиленный низкочастотный сигнал подают на детектор несущей, где этот сигнал переменного тока выпрямляют. Далее выпрямленный сигнал подают на пороговое устройство, где сравнивают напряжение выпрямленного сигнала с некоторым пороговым уровнем и при превышении уровня выпрямленного сигнала этого порогового уровня включают второй генератор низкой частоты, на выходе которого формируют низкочастотный гармонический сигнал со второй частотой, который подают на третью неподвижную катушку с ферромагнитным сердечником. Через эту третью неподвижную катушку с ферромагнитным сердечником радиомаяка излучают в пространство переменное магнитное поле второй низкой частоты. Причем четвертой подвижной катушкой с ферромагнитным сердечником первого поискового устройства это переменное магнитное поле второй низкой частоты принимают и затем полученный низкочастотный гармонический сигнал со второй частотой усиливают с помощью первого узкополосного усилителя второй низкой частоты первого поискового устройства и выпрямляют с помощью первого выпрямителя первого поискового устройства, после чего выпрямленный сигнал постоянного тока подают на первый индикатор уровня принимаемого сигнала первого поискового устройства. Причем пятой подвижной катушкой с ферромагнитным сердечником второго поискового устройства это переменное магнитное поле второй низкой частоты принимают и затем полученный низкочастотный гармонический сигнал со второй частотой усиливают с помощью второго узкополосного усилителя второй низкой частоты второго поискового устройства и выпрямляют с помощью второго выпрямителя второго поискового устройства, после чего выпрямленный сигнал постоянного тока подают на второй индикатор уровня принимаемого сигнала второго поискового устройства. Причем шестой подвижной катушкой с ферромагнитным сердечником третьего поискового устройства это переменное магнитное поле второй низкой частоты принимают и затем полученный низкочастотный гармонический сигнал со второй частотой усиливают с помощью третьего узкополосного усилителя второй низкой частоты третьего поискового устройства и выпрямляют с помощью третьего выпрямителя третьего поискового устройства, после чего выпрямленный сигнал постоянного тока подают на третий индикатор уровня принимаемого сигнала третьего поискового устройства. При этом гармонические низкочастотные сигналы, которые вырабатывают первым и вторым низкочастотными генераторами делают различными по частоте. Этим обеспечивают развязку низкочастотных усилительных трактов радиомаяка и поискового устройства. При этом сами поисковые устройства располагают произвольно, но при этом измеряют азимуты поисковых устройств друг относительно друга и некоторого известного направления, например на Север магнитного поля Земли. При этом в каждом из трех поисковых устройств вращают подвижные катушки с ферромагнитными сердечниками в горизонтальной плоскости вокруг оси, перпендикулярной продольной оси катушки с ферромагнитным сердечником, и добиваются при этом появления на индикаторах уровня каждого из трех поисковых устройств либо минимальных, либо максимальных показаний, причем при высоких уровнях принимаемого сигнала добиваются появления на индикаторе уровня минимальных показаний, а при низких уровнях принимаемого сигнала добиваются появления на индикаторе уровня максимальных показаний. При этом вращение катушки с ферромагнитным сердечником поискового устройства до появления минимальных показаний индикатора уровня принимаемого поисковым устройством сигнала является предпочтительным. При этом в каждом из трех поисковых устройств осуществляют измерение азимута поворота продольной оси подвижной катушки с ферромагнитным сердечником относительно некоторого известного направления, например на Север магнитного поля Земли, при этом получают три угла поворота продольных осей катушек с ферромагнитным сердечником поисковых устройств относительно этого известного направления, каждый из которых однозначно связан с углом расположения продольной оси катушки с ферромагнитным сердечником радиомаяка объекта поиска относительно этого же известного направления, причем для тех поисковых устройств, для которых вращение подвижной катушки с ферромагнитным сердечником производилось до появления максимума принимаемого сигнала, к измеренному углу положения продольной оси катушки с ферромагнитным сердечником поискового устройства прибавляют 90°, после чего решают тригонометрическую задачу для трех треугольников, в которой известны по одной из сторон всех трех треугольников и относительные, но взаимосвязанные друг с другом углы при их вершинах и от каждого из поисковых устройств получают однозначно истинные азимуты и дальности объекта поиска, при этом используют один из полученных азимутов и одну из полученных дальностей объекта поиска для осуществления спасательных мероприятий от того поискового устройства, от которого производить спасательные мероприятия наиболее эффективно.
Однако описанный способ поиска людей под завалами имеет существенный недостаток, связанный с необходимостью производить вращение подвижных катушек поисковых устройств с целью достижения минимальных или максимальных показаний индикатора уровня. Это влечет за собой усложнение процедуры поиска, увеличение времени поиска, т.е. снижению его эффективности.
В тоже время крайне необходимо эффективно решать задачу определения азимута объекта поиска и расстояния до него с высокой точностью и достаточно быстро, т.е. производить поиск людей, находящихся под завалами горных пород. Большая смертность среди персонала угольных шахт обусловлена именно тем, что при существующем положении дел быстро отыскать пострадавших людей не представляется возможным.
В основу изобретения поставлена задача определения азимута и расстояния до объекта поиска, человека, находящегося в толще горных пород. Она решается благодаря тому, что первоначально генерируют непрерывные низкочастотные колебания с частотой f1, причем эти колебания подают на клеммы первой неподвижной катушки с ферромагнитным сердечником и излучают тем самым переменное магнитное поле с частотой f1, при этом первую катушку с ферромагнитным сердечником располагают в непосредственной близости от предполагаемого объекта поиска, при этом переменное магнитное поле с частотой f1 улавливают второй неподвижной катушкой с ферромагнитным сердечником, которую устанавливают в радиомаяке объекта поиска, после чего сигнал, снимаемый с клемм второй катушки с ферромагнитным сердечником усиливают в узкой полосе частот, выпрямляют и оценивают его уровень, причем при превышении выпрямленного сигнала постоянного тока некоторого порогового уровня начинают генерировать непрерывные низкочастотные колебания с частотой f2, которые подают на клеммы третьей неподвижной катушки с ферромагнитным сердечником, которую также располагают в радиомаяке объекта поиска, и излучают тем самым переменное магнитное поле с частотой f2, при этом переменное магнитное поле с частотой f2 улавливают четвертой неподвижной катушкой с ферромагнитным сердечником, которую располагают в первом поисковом устройстве, причем это же переменное магнитное поле с частотой f2 улавливают пятой неподвижной катушкой с ферромагнитным сердечником, которую располагают в этом же первом поисковом устройстве, причем продольные оси четвертой и пятой катушек располагают перпендикулярно друг относительно друга в горизонтальной плоскости, причем это же переменное магнитное поле с частотой f2 улавливают шестой неподвижной катушкой с ферромагнитным сердечником, которую располагают во втором поисковом устройстве, причем это же переменное магнитное поле с частотой f2 улавливают седьмой неподвижной катушкой с ферромагнитным сердечником, которую располагают в этом же втором поисковом устройстве, причем продольные оси шестой и седьмой катушек располагают перпендикулярно друг относительно друга в горизонтальной плоскости, причем это же переменное магнитное поле с частотой f2 улавливают восьмой неподвижной катушкой с ферромагнитным сердечником, которую располагают в третьем поисковом устройстве, причем это же переменное магнитное поле с частотой f2 улавливают девятой неподвижной катушкой с ферромагнитным сердечником, которую располагают в этом же третьем поисковом устройстве, причем продольные оси восьмой и девятой катушек располагают перпендикулярно друг относительно друга в горизонтальной плоскости, причем сами поисковые устройства располагают произвольно друг относительно друга на некотором известном расстоянии, причем каждую пару катушек поисковых устройств, оси которых взаимно перпендикулярны, ориентируют на плоскости произвольно, но при этом измеряют азимут оси одной из неподвижных катушек с ферромагнитным сердечником, условно называемой реперной катушкой, каждого из поисковых устройств относительно некоторого известного направления, например на Север магнитного поля Земли, при этом в каждом из трех поисковых устройств производят узкополосное усиление принимаемых неподвижными катушками с ферромагнитными сердечниками низкочастотных сигналов, при этом в каждом из трех поисковых устройств производят выпрямление принятых неподвижными катушками и усиленных низкочастотных сигналов, при этом в каждом из поисковых устройств вычисляют отношение уровней принятых его двумя неподвижными катушками с ферромагнитными сердечниками, усиленных и выпрямленных низкочастотных сигналов, причем если уровень сигнала от реперной катушки меньше чем уровень сигнала от катушки, ортогональной реперной, то вычисляют частное от деления принятого, усиленного и выпрямленного сигнала от реперной катушки к принятому, усиленному и выпрямленному сигналу от катушки, ортогональной реперной, после чего в каждом из поисковых устройств по функции арккотангенса определяют угол между осью реперной катушки и направлением, при котором уровень принимаемого сигнала имеет максимальную величину, причем если уровень сигнала от реперной катушки больше чем уровень сигнала от катушки, ортогональной реперной, то вычисляют частное от деления принятого, усиленного и выпрямленного сигнала от катушки, ортогональной реперной к принятому, усиленному и выпрямленному сигналу от реперной катушки, после чего в каждом из поисковых устройств по функции арктангенса определяют угол между осью реперной катушки и направлением, при котором уровень принимаемого сигнала имеет максимальную величину, после чего в каждом из поисковых устройств складывают полученные углы с углом отклонения оси реперной катушки от некоторого известного направления, например на Север магнитного поля Земли, при этом получают три направления относительно этого известного направления в которых уровень принимаемого сигнала имеет максимальную величину, каждый из которых однозначно связан с углом расположения продольной оси катушки с ферромагнитным сердечником радиомаяка объекта поиска относительно этого же известного направления, после чего решают тригонометрическую задачу для трех треугольников, в которой известны по одной из сторон всех трех треугольников и относительные, но взаимосвязанные друг с другом углы при их вершинах и от каждого из поисковых устройств получают однозначно истинные азимуты и дальности объекта поиска, при этом используют один из полученных азимутов и одну из полученных дальностей объекта поиска для осуществления спасательных мероприятий от того поискового устройства, от которого производить спасательные мероприятия наиболее эффективно.
Сравнение предполагаемого изобретения с уже известными способами и прототипом показывает, что заявляемый способ проявляет новые технические свойства, заключающиеся в возможности с высокой точностью однозначного и быстрого определения азимута и дальности объекта поиска, находящегося в завале горных пород в пределах рабочих расстояний, которые реально в шахтах составляют 50-100 м.
Эти свойства предполагаемого изобретения являются новыми, так как в способе-прототипе, в силу присущего ему недостатка, заключающегося в длительной процедуре определения дальности и азимута объекта поиска, связанной с вращением подвижных катушек с ферромагнитными сердечниками, поиском направления приема минимального или максимального уровня сигнала, а затем и измерением угла этого направления, проводить спасательные операции по поиску людей под обвалами горных пород в шахтах представляется не достаточно эффективным.
В предлагаемом способе поиска людей под завалами горных пород каждого человека из числа персонала шахты снабжают радиомаяком. В случае аварии поиск пострадавших осуществляет специальная группа спасателей, которую снабжают поисковым оборудованием, состоящим из четырех частей. Поисковое оборудование состоит из устройства активации радиомаяков и трех поисковых устройств. Устройство активации предназначено для излучения переменного магнитного поля с частотой f1. Состоит устройство активации из генератора непрерывных низкочастотных колебаний с частотой f1 требуемой мощности и неподвижной катушки с ферромагнитным сердечником. Располагают устройство активации в непосредственной близости от места проведения спасательных мероприятий. Мощность излучения переменного магнитного поля должна быть достаточной для того, чтобы это переменное магнитное поле можно было бы принять радиомаяками, находящимися в зоне проведения спасательных мероприятий. В каждом из радиомаяков это переменное магнитное поле принимают, усиливают и оценивают его уровень. При превышении этого уровня некоторого порогового значения в радиомаяке включают генератор непрерывных низкочастотных колебаний с частотой f2, т.е. осуществляют активацию радиомаяка. Эти колебания подают на клеммы неподвижной катушки с ферромагнитным сердечником, которую располагают в радиомаяке, и излучают тем самым переменное магнитное поле с частотой f2. Это переменное магнитное поле с частотой f2 улавливают шестью неподвижными катушками с ферромагнитными сердечниками трех поисковых устройств, в каждом своей парой катушек, продольные оси которых взаимно перпендикулярны. При этом сами поисковые устройства располагают и ориентируют на плоскости произвольно, устанавливая их на некотором известном расстоянии друг относительно друга. Расположив каждое поисковое устройство на плоскости, измеряют азимут оси одной из неподвижных катушек с ферромагнитным сердечником, условно называемой реперной катушкой, каждого из поисковых устройств относительно некоторого известного направления, например на Север магнитного поля Земли. Принятые неподвижными катушками поисковых устройств сигналы усиливают в узкой полосе частот и выпрямляют. После этого вычисляют частное от деления уровней принятых, усиленных и выпрямленных сигналов попарно в каждом поисковом устройстве. Для того чтобы не иметь дело с большими числами, получаемыми при делении на малую величину, всегда вычисляют частное от деления меньшего уровня принятого, усиленного и выпрямленного сигнала на больший уровень принятого, усиленного и выпрямленного сигнала. После этого по полученному числовому отношению берут обратную тригонометрическую функцию и определяют угол между осью реперной катушки и направлением, при котором уровень принимаемого сигнала имеет максимальную величину. Причем, если уровень сигнала от реперной катушки меньше чем уровень сигнала от катушки, ортогональной реперной, то определяют угол по функции арккотангенса. Причем, если уровень сигнала от реперной катушки больше, чем уровень сигнала от катушки, ортогональной реперной, то определяют угол по функции арктангенса. При этом собственно уровень принимаемого сигнала не измеряют, а вычисляют лишь отношение уровней. Само значение уровня принимаемого сигнала при этом не имеет значения. После чего, после определения углов в каждом из поисковых устройств, складывают полученные углы с углом отклонения оси реперной катушки поискового устройства от некоторого известного направления, например на Север магнитного поля Земли, при этом относительно этого известного направления получают три направления, в которых уровень принимаемого сигнала имеет максимальную величину. Каждый из полученных углов однозначно связан с углом расположения продольной оси катушки с ферромагнитным сердечником радиомаяка объекта поиска относительно этого же известного направления. Определив углы, решают тригонометрическую задачу для трех треугольников, в которой известны по одной из сторон всех трех треугольников и относительные, но взаимосвязанные друг с другом углы при их вершинах и от каждого из поисковых устройств получают однозначно азимуты и дальности объекта поиска. Для проведения спасательных мероприятий выбирают тот азимут и то расстояние до объекта поиска от того поискового устройства, от которого производить эти спасательные мероприятия наиболее эффективно.
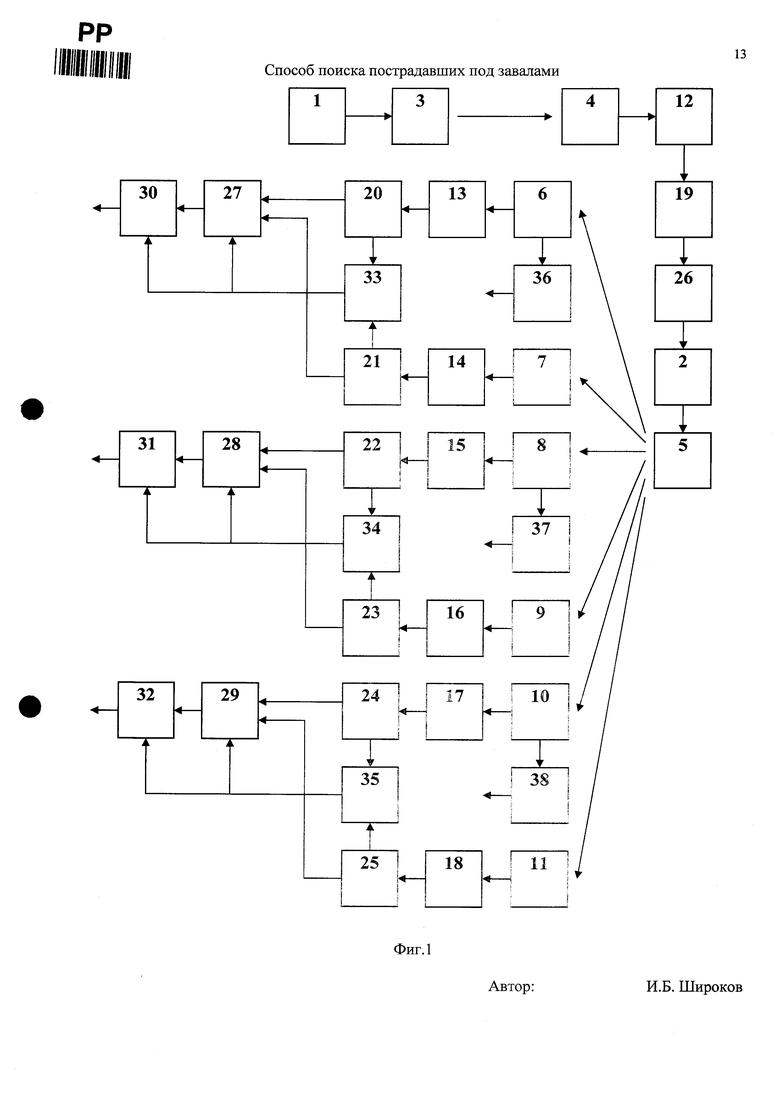
Указанный способ поиска пострадавших под завалами можно реализовать с помощью устройства, приведенного на фиг. 1.
Устройство поиска пострадавших под завалами состоит из устройства активации, радиомаяка и устройств поиска и содержит генераторы низкочастотных колебаний 1 и 2, неподвижные катушки с ферромагнитными сердечниками 3, 4, 5, 6, 7, 8, 9, 10 и 11 узкополосные усилители низкочастотных сигналов 12, 13, 14, 15, 16, 17 и 18, выпрямители 19, 20, 21, 22, 23, 24 и 25, пороговое устройство 26, управляемые схемы деления уровней сигналов 27, 28 и 29, управляемые схемы определения углов 30, 31 и 32, компараторы сигналов 33, 34 и 35, измерители азимута реперных катушек поисковых устройств относительно некоторого известного направления, например на Север магнитного поля Земли, 36, 37 и 38.
Выход генератора низкочастотных колебаний 1 соединен с выводами неподвижной катушки с ферромагнитным сердечником 3, выводы неподвижной катушки с ферромагнитным сердечником 4 соединены с входом узкополосного усилителя низкочастотных сигналов 12, выход которого соединен с входом выпрямителя 19, выход которого соединен со входом порогового устройства 26, выход которого соединен с входом управления низкочастотного генератора 2, выход которого соединен с выводами неподвижной катушки с ферромагнитным сердечником 5, при этом выводы неподвижной катушки с ферромагнитным сердечником 6 соединены с входом узкополосного усилителя низкочастотных сигналов 13, при этом выводы неподвижной катушки с ферромагнитным сердечником 7 соединены с входом узкополосного усилителя низкочастотных сигналов 14, при этом выводы неподвижной катушки с ферромагнитным сердечником 8 соединены с входом узкополосного усилителя низкочастотных сигналов 15, при этом выводы неподвижной катушки с ферромагнитным сердечником 9 соединены с входом узкополосного усилителя низкочастотных сигналов 16, при этом выводы неподвижной катушки с ферромагнитным сердечником 10 соединены с входом узкополосного усилителя низкочастотных сигналов 17, при этом выводы неподвижной катушки с ферромагнитным сердечником 11 соединенного усилителя низкочастотных сигналов 13 соединен с входом выпрямителя 20, при этом выход узкополосного усилителя низкочастотных сигналов 14 соединен с входом выпрямителя 21, при этом выход узкополосного усилителя низкочастотных сигналов 15 соединен с входом выпрямителя 22, при этом выход узкополосного усилителя низкочастотных сигналов 16 соединен с входом выпрямителя 23, при этом выход узкополосного усилителя низкочастотных сигналов 17 соединен с входом выпрямителя 24, при этом выход узкополосного усилителя низкочастотных сигналов 18 соединен с входом выпрямителя 25, при этом выход выпрямителя 20 соединен с первым сигнальным входом управляемой схемы деления уровней сигналов 27, при этом выход выпрямителя 21 соединен со вторым сигнальным входом управляемой схемы деления уровней сигналов 27, вход управления которой соединен с выходом компаратора 33, при этом выход выпрямителя 22 соединен с первым сигнальным входом управляемой схемы деления уровней сигналов 28, при этом выход выпрямителя 23 соединен со вторым сигнальным входом управляемой схемы деления уровней сигналов 28, вход управления которой соединен с выходом компаратора 34, при этом выход выпрямителя 24 соединен с первым сигнальным входом управляемой схемы деления уровней сигналов 29, при этом выход выпрямителя 25 соединен со вторым сигнальным входом управляемой схемы деления уровней сигналов 29, вход управления которой соединен с выходом компаратора 35, при этом выход управляемой схемы деления уровней сигналов 27 соединен с сигнальным входом управляемой схемы определения углов 30, вход управления которой соединен с выходом компаратора 33, при этом выход управляемой схемы деления уровней сигналов 28 соединен с сигнальным входом управляемой схемы определения углов 31, вход управления которой соединен с выходом компаратора 34, при этом выход управляемой схемы деления уровней сигналов 29 соединен с сигнальным входом управляемой схемы определения углов 32, вход управления которой соединен с выходом компаратора 35, при этом первый вход компаратора 33 соединен с выходом выпрямителя 20, а второй вход компаратора 33 соединен с выходом выпрямителя 21, при этом первый вход компаратора 34 соединен с выходом выпрямителя 22, а второй вход компаратора 34 соединен с выходом выпрямителя 23, при этом первый вход компаратора 35 соединен с выходом выпрямителя 24, а второй вход компаратора 35 соединен с выходом выпрямителя 25, при этом ось вращения катушки с ферромагнитным сердечником 6 соединена с измерителем 36 азимута реперной катушки первого поискового устройства относительно некоторого известного направления, например на Север магнитного поля Земли, при этом ось вращения катушки с ферромагнитным сердечником 8 соединена с измерителем 37 азимута реперной катушки второго поискового устройства относительно некоторого известного направления, например на Север магнитного поля Земли, при этом ось вращения катушки с ферромагнитным сердечником 10 соединена с измерителем 38 азимута реперной катушки третьего поискового устройства относительно некоторого известного направления, например на Север магнитного поля Земли.
Работает устройство, реализующее способ поиска пострадавших под завалами следующим образом.
Генератор низкочастотных колебаний 1 формирует низкочастотные колебания с частотой f1 требуемой мощности, которые возбуждают с помощью неподвижной катушки с ферромагнитным сердечником 3 переменное низкочастотное магнитное поле с частотой f1. Это переменное низкочастотное магнитное поле улавливают неподвижной катушкой с ферромагнитным сердечником 4, которая входит в состав радиомаяка. Сигнал с выводов этой неподвижной катушки с ферромагнитным сердечником 4 подают на вход узкополосного усилителя низкочастотных сигналов 12, который также входит в состав радиомаяка, где принятый сигнал усиливают в узкой полосе частот, отделяя его от индустриальных помех, и подают на выпрямитель 19, входящий в состав радиомаяка. Выпрямленный сигнал подают на вход порогового устройства 26, входящего в состав радиомаяка. При превышении принятого, усиленного и выпрямленного сигнала некоторого порогового уровня пороговое устройство срабатывает и включает генератор непрерывных низкочастотных колебаний 2, входящий в состав радиомаяка. Этот генератор непрерывных низкочастотных колебаний возбуждает с помощью неподвижной катушки с ферромагнитным сердечником 5, входящей в состав радиомаяка, переменное низкочастотное магнитное поле с частотой f2 заданной интенсивности. Это переменное низкочастотное магнитное поле с частотой f2 улавливают неподвижными катушками с ферромагнитными сердечниками 6, 7, 8, 9, 10 и 11, входящими в состав трех поисковых устройств. Сигнал, наведенный на выводах i-той приемной неподвижной катушки с ферромагнитным сердечником однозначно связан с расстоянием между приемной и передающей катушками следующей зависимостью

где Li - расстояние между катушками, м;
K - коэффициент пропорциональности, имеющий размерность В·м3, зависящий от амплитуды напряжения возбуждения передающей катушки, частоты возбуждения, числа витков обоих катушек, их диаметра, длины и проницаемости ферромагнитных сердечников;
φ0 - начальная фаза низкочастотных колебаний;
θi - угол между продольной осью передающей катушки с ферромагнитным сердечником радиомаяка 5 и продольными осями приемных катушек с ферромагнитным сердечником поисковых устройств 6, 7, 8, 9, 10 и 11.
Этот сигнал имеет малый уровень и присутствует на фоне индустриальных помех, имеющих как магнитную, так и радиочастотную природы. Эти помехи в шахтах хоть и имеют пониженный уровень, но присутствуют в любом случае.
По этой причине в каждой из поисковых станций производят узкополосное усиление принятого сигнала и отделение его от индустриальных помех с помощью узкополосных низкочастотных усилителей 13, 14, 15, 16, 17 и 18, входящих в состав трех поисковых устройств.
Далее производят выпрямление усиленных сигналов с помощью выпрямителей 20, 21, 22, 23, 24 и 25, входящих в состав трех поисковых устройств и получают на выходе i-того выпрямителя сигнал постоянного тока, соответствующий действующему напряжению сигнала переменного тока, подаваемого на его вход

где G - коэффициент усиления узкополосных усилителей.
Если рассматривать j-тое поисковое устройство как одно целое, в состав которого входят две неподвижные катушки с ферромагнитными сердечниками a и b, продольные оси которых взаимно перпендикулярны, то для этой пары катушек и соответствующей пары узкополосных усилителей и выпрямителей можно записать значения выпрямленных сигналов как
Здесь угол θj отсчитывается для одной из катушек j-того поискового устройства, условно называемой реперной. Пусть это будет катушка a.
Коэффициенты усиления для всех узкополосных усилителей одинаковы.
Принятые, усиленные и выпрямленные сигналы попарно подают на сигнальные входы управляемых схем деления уровней сигналов 27, 28, 29, которые осуществляют деление одного уровня принятого сигнала на другой. При этом если уровень сигнала U0ja меньше, чем уровень сигнала, то осуществляют деление уровня сигнала U0ja на уровень сигнала U0Jb. В результате получают следующее соотношение
При этом если уровень сигнала U0ja больше, чем уровень сигнала U0jb, то осуществляют деление уровня сигнала U0jb на уровень сигнала U0ja. В результате получают следующее соотношение
В обоих случаях отношение уровней сигналов не зависит от самих уровней, а определяется лишь углом между осью реперной катушки поискового устройства и осью катушки радиомаяка объекта поиска. Для определения этого угла необходимо взять обратную тригонометрическую функцию, в первом случае арккотангенс, во втором арктангенс.
Сказанное справедливо для любой ориентации на плоскости катушек поискового устройства. Другими словами нет необходимости производить вращение подвижных катушек поисковых устройств с целью получения максимального или минимального уровня принимаемого сигнала, и определения тем самым угла поворота оси катушки поискового устройства, как это было по способу прототипу. По заявляемому способу получают угол между осью одной из катушек поискового устройства, условно называемой реперной, и осью излучающей катушки радиомаяка объекта поиска при любом положении на плоскости катушек поискового устройства.
Исключительное деление меньшего уровня сигнала на больший не приводит к появлению больших чисел, в пределе стремящихся к бесконечности, которые чисто технически трудно представить с помощью электронных устройств. Если операцию деления и определения угла выполнять с помощью специализированного вычислителя, например персонального компьютера, то в этом случае нет необходимости выполнять управление процессом деления и всегда выполнять деление уровня одного из сигналов на уровень другого. Проблем больших чисел в этом случае не возникает и требуемый угол можно получать, используя только лишь функцию, например, котангенса.
Управление процессами деления в поисковых устройствах в нашем случае осуществляют компараторы 33, 34 и 35, которые производят сравнение уровней принятых, усиленных и выпрямленных сигналов от обеих катушек каждого из поисковых устройств и по результату сравнения управляют процессом деления, а также управляют схемой определения угла с помощью обратных тригонометрических функций 30, 31 и 32.
Далее с помощью измерителей азимута реперных катушек поисковых устройств относительно некоторого известного направления, например на Север магнитного поля Земли, 36, 37 и 38 определяют эти азимуты и складывая эти азимуты с определенными ранее с помощью схем 30, 31 и 32 углами для каждого из поисковых устройств, получают соответственно для каждого из поисковых устройств три направления α1, α2 и α3, относительно некоторого известного направления, например на Север магнитного поля Земли, для трех поисковых устройств соответственно, в которых уровень принимаемого сигнала имеет максимальную величину. Эти три направления в общем случае не являются азимутами объекта поиска, они лишь имеют отношение к расположению продольной оси катушки с ферромагнитным сердечником радиомаяка объекта поиска.
После того как получены три направления α1, α2 и α3, поисковых устройств относительно некоторого известного направления, например на Север магнитного поля Земли, приступают к вычислению истинных азимутов и дальностей объекта поиска относительно места расположения каждого из поисковых устройств. Для проведения таких вычислений необходимо знать расстояния между всеми поисковыми устройствами и азимуты от каждого из поисковых устройств на два других поисковых устройства относительно некоторого известного направления, например на Север магнитного поля Земли. Формулы вычисления истинных азимутов и дальностей объекта поиска достаточно громоздки, но это обычная тригонометрическая задача. Например, если для упрощения формул вычисления расположить все три поисковых устройства на одной линии, совпадающей с некоторым известным направлением, например на Север магнитного поля Земли, а расстояния между первым и вторым поисковыми устройствами определить как b1, а расстояние между вторым и третьим поисковыми устройствами определить как b2, при этом расстояние между первым и третьим поисковыми устройствами будет определяться как b1+b2, то предварительно вычисляют промежуточные углы φ1 и φ2, определяемые как

После этого определяют декартовые координаты объекта поиска относительно первого поискового устройства


После этого определяют полярные координаты объекта поиска от каждого из поисковых устройств, т.е. определяют дальности и истинные азимуты объекта поиска от каждого из поисковых устройств. В принятой системе координат истинный азимут будет отсчитываться от прямой, соединяющей все три поисковых устройства, т.е. от направления на Север магнитного поля Земли.
Дальности объекта поиска определяют по следующим формулам
где R1, R2 и R3 - дальности объекта поиска от первого, второго и третьего поисковых устройств соответственно.
Истинные азимуты β1, β2 и β3 объекта поиска соответственно от первого, второго и третьего поисковых устройств, определяют как
Таким образом, получают координаты объекта поиска, человека, находящегося под завалом. Для проведения спасательных мероприятий выбирают тот азимут объекта поиска и, соответственно, то расстояние до объекта поиска от того из поисковых устройств, от которого проводить спасательные мероприятия наиболее эффективно.
Народнохозяйственный эффект от использования предполагаемого изобретения связан с появлением возможности быстро и точно определить координаты человека, находящегося под завалом горной породы. При этом появляется возможность оперативно организовать спасательные мероприятия и обеспечить, тем самым, сохранение жизни людей в лучшем случае, в худшем случае имеется возможность отыскать тела людей уже погибших в результате аварии.
При проведении спасательных мероприятий не производят вращение подвижных катушек. Все катушки поисковых устройств неподвижны, что существенно упрощает процедуру поиска и соответственно уменьшает время поиска. Когда речь идет о спасении жизней людей это обстоятельство является особенно важным. Единственная процедура, кроме вычислительных процедур, которую необходимо выполнить один раз - это разместить поисковые устройства произвольным образом и зафиксировать расстояния между ними и их азимуты друг относительно друга и относительно некоторого известного направления, например на Север магнитного поля Земли. Далее производят только вычисления. Этот процесс легко автоматизируют.
Все вычислительные процедуры определения дальности и азимута объекта поиска, человека, находящегося под завалом горной породы, выполняют в реальном масштабе времени с помощью вычислительного устройства. Реализация вычислительного устройства не принципиальна, само устройство может даже находится на поверхности далеко за пределами зоны аварии. Данные в вычислительное устройство вводят при этом вручную, используя устную передачу информации и известные каналы связи.
Способ поиска пострадавших под завалами относиться к области обеспечения безопасности работ в горной промышленности и может использоваться для определения местоположения персонала под завалами в шахтах.
Новым в способе поиска пострадавших под завалами является снабжение всего персонала шахты радиомаяками и организация поисковой группы, которую снабжают устройством активации радиомаяков и устройствами поиска в количестве трех штук.
Устройство активации возбуждает переменное низкочастотное магнитной поле с одной частотой и заданной мощности. Радиомаяком персонала шахты это переменное магнитное поле улавливают и при превышении этого поля некоторого порогового уровня радиомаяком возбуждают переменное низкочастотное магнитное поле с другой частотой. Шестью неподвижными катушками с ферромагнитными сердечниками трех поисковых устройств (по две в каждом) это переменное низкочастотное магнитное поле принимают, усиливают полученные на выходе катушек электрические сигналы и выпрямляют их, после чего выпрямленные сигналы в каждом из поисковых устройств попарно делят один на другой. При этом продольные оси двух катушек в каждом из поисковых устройств располагают перпендикулярно друг относительно друга. После этого из частного от деления получают угол между осью неподвижной катушки поискового устройства и направлением приема максимального сигнала. По определенным углам определяют расстояние и азимут радиомаяка от каждого из поисковых устройств. При известных расстояниях между самими поисковыми устройствами и известных азимутов самих поисковых устройств друг относительно друга, определяют азимуты радиомаяка или объекта поиска от каждого из поисковых устройств. Выбирают тот азимут и расстояние до объекта поиска от того из поисковых устройств, от которого производить спасательные мероприятия наиболее эффективно.
Способ поиска людей под завалами, включающий излучение и прием непрерывных низкочастотных колебаний, отличающийся тем, что первоначально генерируют непрерывные низкочастотные колебания с частотой f1, причем эти колебания подают на клеммы первой неподвижной катушки с ферромагнитным сердечником и излучают тем самым переменное магнитное поле с частотой f1, при этом первую катушку с ферромагнитным сердечником располагают в непосредственной близости от предполагаемого объекта поиска, при этом переменное магнитное поле с частотой f1 улавливают второй неподвижной катушкой с ферромагнитным сердечником, которую устанавливают в радиомаяке объекта поиска, после чего сигнал, снимаемый с клемм второй катушки с ферромагнитным сердечником усиливают в узкой полосе частот, выпрямляют и оценивают его уровень, причем при превышении выпрямленного сигнала постоянного тока некоторого порогового уровня начинают генерировать непрерывные низкочастотные колебания с частотой f2, которые подают на клеммы третьей неподвижной катушки с ферромагнитным сердечником, которую также располагают в радиомаяке объекта поиска, и излучают тем самым переменное магнитное поле с частотой f2, при этом переменное магнитное поле с частотой f2 улавливают четвертой неподвижной катушкой с ферромагнитным сердечником, которую располагают в первом поисковом устройстве, причем это же переменное магнитное поле с частотой f2 улавливают пятой неподвижной катушкой с ферромагнитным сердечником, которую располагают в этом же первом поисковом устройстве, причем продольные оси четвертой и пятой катушек располагают перпендикулярно друг относительно друга в горизонтальной плоскости, причем это же переменное магнитное поле с частотой f2 улавливают шестой неподвижной катушкой с ферромагнитным сердечником, которую располагают во втором поисковом устройстве, причем это же переменное магнитное поле с частотой f2, улавливают седьмой неподвижной катушкой с ферромагнитным сердечником, которую располагают в этом же втором поисковом устройстве, причем продольные оси шестой и седьмой катушек располагают перпендикулярно друг относительно друга в горизонтальной плоскости, причем это же переменное магнитное поле с частотой f2 улавливают восьмой неподвижной катушкой с ферромагнитным сердечником, которую располагают в третьем поисковом устройстве, причем это же переменное магнитное поле с частотой f2 улавливают девятой неподвижной катушкой с ферромагнитным сердечником, которую располагают в этом же третьем поисковом устройстве, причем продольные оси восьмой и девятой катушек располагают перпендикулярно друг относительно друга в горизонтальной плоскости, причем сами поисковые устройства располагают произвольно друг относительно друга на некотором известном расстоянии, причем каждую пару катушек поисковых устройств, оси которых взаимно перпендикулярны, ориентируют на плоскости произвольно, но при этом измеряют азимут оси одной из неподвижных катушек с ферромагнитным сердечником, условно называемой реперной катушкой, каждого из поисковых устройств относительно некоторого известного направления, например на Север магнитного поля Земли, при этом в каждом из трех поисковых устройств производят узкополосное усиление принимаемых неподвижными катушками с ферромагнитными сердечниками низкочастотных сигналов, при этом в каждом из трех поисковых устройств производят выпрямление принятых неподвижными катушками и усиленных низкочастотных сигналов, при этом в каждом из поисковых устройств вычисляют отношение уровней принятых его двумя неподвижными катушками с ферромагнитными сердечниками, усиленных и выпрямленных низкочастотных сигналов, причем если уровень сигнала от реперной катушки меньше чем уровень сигнала от катушки, ортогональной реперной, то вычисляют частное от деления принятого, усиленного и выпрямленного сигнала от реперной катушки к принятому, усиленному и выпрямленному сигналу от катушки, ортогональной реперной, после чего в каждом из поисковых устройств по функции арккотангенса определяют угол между осью реперной катушки и направлением, при котором уровень принимаемого сигнала имеет максимальную величину, причем если уровень сигнала от реперной катушки больше, чем уровень сигнала от катушки, ортогональной реперной, то вычисляют частное от деления принятого, усиленного и выпрямленного сигнала от катушки, ортогональной реперной к принятому, усиленному и выпрямленному сигналу от реперной катушки, после чего в каждом из поисковых устройств по функции арктангенса определяют угол между осью реперной катушки и направлением, при котором уровень принимаемого сигнала имеет максимальную величину, после чего в каждом из поисковых устройств складывают полученные углы с углом отклонения оси реперной катушки от некоторого известного направления, например на Север магнитного поля Земли, при этом получают три направления относительно этого известного направления в которых уровень принимаемого сигнала имеет максимальную величину, каждый из которых однозначно связан с углом расположения продольной оси катушки с ферромагнитным сердечником радиомаяка объекта поиска относительно этого же известного направления, после чего решают тригонометрическую задачу для трех треугольников, в которой известны по одной из сторон всех трех треугольников и относительные, но взаимосвязанные друг с другом углы при их вершинах и от каждого из поисковых устройств получают однозначно истинные азимуты и дальности объекта поиска, при этом используют один из полученных азимутов и одну из полученных дальностей объекта поиска для осуществления спасательных мероприятий от того поискового устройства, от которого производить спасательные мероприятия наиболее эффективно.

