Область техники, к которой относится изобретение
Настоящее изобретение относится к способам и системам для транспортировки и выборочной выдачи пищевых продуктов. Более конкретно, изобретение относится к способам и системам для взвешивания и сортировки пищевых продуктов.
Уровень техники
В отрасли пищевой промышленности взвешивающие и сортирующие машины раскрыты в таких публикациях, как US 6234297, US 6015049, WO 98/49892, US 6321914, US 5526437, US 4569434, EP 0593126 и EP 0900601, все патенты US среди указанных включены в настоящее описание в виде ссылки.
В пищевой промышленности существует потребность сортировки продуктов или изделий на высоких скоростях или с высокой производительностью в соответствии с различными физическими характеристиками, такими как размер, цвет, вес, или любой их комбинацией. Промышленно упакованные пищевые продукты, такие как куски домашней птицы, часто расфасованы в упаковки с примерно одинаковым весом, независимо от числа кусков в упаковке. Таким образом, многие упаковки пищевых продуктов включают более одного отдельного продукта, т.е. упаковка обычно содержит, по меньшей мере, два продукта. Некоторые упаковки продуктов, такие как упаковки куриной грудки, обычно включают три куска, однако это число может быть и больше, например четыре или пять кусков в одной упаковке, поскольку все упаковки должны иметь примерно одинаковый вес.
Для обеспечения возможности объединения пищевых продуктов различного веса в упаковки, имеющие примерно одинаковый вес, необходимо использовать многоголовочные весы. В многоголовочных весах, которые в общем случае известны из уровня техники, отдельные куски пищевых продуктов случайным образом распределены среди большого числа, например, 5-50, а лучше 8-20 систем взвешивания. Системы взвешивания обычно выполнены в виде приемников. При этом для расчета наиболее предпочтительной комбинации приемников для достижения целевого веса, а также для выбора приемников, которые должны произвести выдачу содержащихся в них продуктов для завершения окончательной упаковки, используют компьютер. Таким образом, существует необходимость поддержания как можно меньшего веса продуктов в каждом приемнике, чтобы обеспечить большее количество комбинаций. Для достижения оптимального количества комбинаций предлагаемое изобретение раскрывает признаки, благодаря которым каждый приемник принимает за один раз не более одного пищевого продукта.
Из международной патентной заявки WO 2006/092148 известно устройство взвешивания, снабженное дозирующим механизмом для управляемого транспортирования порций продукта от системы подачи к системе взвешивания. Дозирующий механизм содержит транспортный шнек для транспортирования продукта с приводом от двигателя, выполненный в виде винтового стержня, расположенного в открытом желобе.
Описанный выше дозирующий механизм обеспечивает очень аккуратную и точную доставку продуктов в систему взвешивания. Однако в некоторых случаях было обнаружено, что в систему взвешивания может быть доставлено одновременно более одного продукта. Одновременная доставка более чем одного продукта в каждый приемник может, в частности, произойти, если множество продуктов расположено с перекрытием. Если в отдельном приемнике расположено более одного продукта, гораздо труднее объединить содержимое приемника с другими кусками, расположенными в других приемниках. В худшем случае вообще не будет существовать комбинации, с помощью которой можно будет образовать целевой вес, и содержимое приемника должно быть утилизировано, что ведет к потерям продукта, или использовано заново, т.е. вновь направлено в систему подачи, что ведет к потере времени и дополнительному износу продукта. Дальнейшее повторное использование может в конечном итоге привести продукт в негодность.
Раскрытие изобретения
Таким образом, целью настоящего изобретения является разработка технологии доставки целевых продуктов в приемник по одному за раз.
Дополнительным преимуществом является то, что технология, описанная в настоящем изобретении, может быть реализована в уже существующих механизмах взвешивания, таких как механизмы, описанные выше, без реальных модификаций самих этих механизмов.
Указанные потребности, цели, особенности и преимущества, а также многие другие потребности, цели, особенности и преимущества, очевидные из нижеследующего подробного описания настоящих и предпочтительных вариантов, достигаются благодаря характеристикам первого объекта настоящего изобретения, характеризующего способ транспортировки и выборочной выдачи нескольких пищевых продуктов по одному, включающего:
i) обеспечение системы подачи, причем указанная система подачи содержит:
a) входной конец для приема пищевых продуктов, указанные пищевые продукты являются по существу твердыми,
b) выходной конец для выборочной выдачи пищевых продуктов по одному за один раз,
c) приемник, расположенный ниже выходного конца, для приема отдельного указанного пищевого продукта при его выдаче из указанного выходного конца,
d) блок определения, расположенный на выходном конце, и
e) подающий механизм, предназначенный для транспортировки пищевых продуктов от входного конца к выходному концу,
ii) подачу пищевых продуктов навалом в указанный первый конец системы подачи отдельно или с по крайней мере частичным перекрытием,
iii) определение первого режима работы, когда пищевые продукты отсутствуют в выходном конце и пищевые продукты отсутствуют в приемнике,
iv) транспортировку в указанном первом режиме работы указанных пищевых продуктов посредством подающего механизма в направлении от входного конца к выходному концу с первой средней скоростью,
v) определение второго режима работы, когда отдельный пищевой продукт присутствует в выходном конце, но пищевые продукты отсутствуют в приемнике,
vi) транспортировку в указанном втором режиме работы указанных пищевых продуктов посредством подающего механизма в направлении от входного конца к выходному концу со второй средней скоростью, причем указанная вторая средняя скорость меньше первой скорости,
vii) определение третьего режима работы, когда указанный первый отдельный пищевой продукт выходит из выходного конца или принимается в приемник,
viii) остановку в указанном третьем режиме работы указанного подающего механизма до тех пор, пока первый отдельный пищевой продукт не покинет приемник.
Пищевые продукты могут периодически поступать на вход системы подачи один за одним, т.е. с расстоянием или разделением между пищевыми продуктами. Однако такие расстояния между пищевыми продуктами обуславливают потерю времени и их следует в принципе избегать. При этом, поскольку пищевые продукты поступают навалом и прием пищевых продуктов во входном конце по крайней мере в каком-то смысле случаен, вероятно возникновение расстояния между одним или более пищевыми продуктами. Однако более вероятно, что, поскольку пищевые продукты поступают навалом, они будут поступать на вход с перекрытием, т.е. задняя часть первого пищевого продукта может перекрываться с передней частью последующего пищевого продукта.
Пищевые продукты в принципе могут быть любыми, однако предпочтительно пищевые продукты состоят из липких пищевых продуктов, таких как кусочки птицы и т.п. Размер пищевого продукта варьируется от минимального значения для продукта, который, по крайней мере, для промышленных целей может обрабатываться индивидуально, такой как размер куриного крыла. Типичным размером пищевого продукта можно по существу считать размер куриной грудки.
Подающий механизм, приводимый в движение двигателем, который в свою очередь управляется блоком управления, транспортирует пищевые продукты от входного конца к выходному концу, расположенному напротив входного конца. Выходной конец контролируется блоком определения, который также соединен с блоком управления и обнаруживает присутствие или отсутствие пищевого продукта.
Первый режим работы используют, когда пищевые продукты отсутствуют в выходном конце. Средняя скорость, используемая в подающем механизме, высокая, поскольку временные потери между двумя отдельными пищевыми продуктами должны быть как можно меньше.
Когда блок определения обнаруживает пищевой продукт в выходном конце, используют второй режим работы. Во втором режиме работы средняя скорость подающего механизма меньше, так что первый пищевой продукт приближается к приемнику медленно. В некоторой точке первый пищевой продукт начинает соскальзывать вниз в направлении приемника под действием гравитации при отсутствии или только при ограниченном участии подающего механизма. Обычно это происходит, когда центр тяжести пищевого продукта находится за пределами выходного конца. Поскольку подающий механизм движется с меньшей скоростью, возможный второй пищевой продукт, расположенный около выходного конца, будет оставаться в системе подачи и не будет сталкиваться в приемник.
Когда блок определения обнаруживает, что отдельный пищевой элемент покинул выходной конец, используют третий режим работы. В третьем режиме работы подающий механизм временно останавливается для того, чтобы избежать попадания второго отдельного пищевого продукта в приемник до его опорожнения. После того как приемник опустел, может использоваться первый режим работы в случае, если пищевой продукт отсутствует в выходном конце, или второй режим работы в случае, если второй пищевой продукт присутствует в выходном конце.
Согласно другому варианту выполнения первой реализации на этапе viii), перед остановкой и при условии отсутствия второго отдельного пищевого продукта в выходном конце, в указанном третьем режиме работы транспортируют посредством подающего механизма пищевые продукты в направлении от входного конца к выходному концу с первой средней скоростью до тех пор, пока второй отдельный пищевой продукт не окажется в выходном конце, а затем производят остановку.
В случае если первый пищевой продукт покинул выходной конец и в выходном конце отсутствует второй отдельный пищевой продукт, в целях экономии времени подающий механизм может продолжать работы до тех пор, пока второй отдельный пищевой продукт не будет присутствовать в выходном конце, в этот момент подающий механизм должен остановиться и ожидать опустошения приемника. В случае если к этому времени приемник был уже опустошен, подающий механизм может сразу продолжать работать во втором рабочем режиме без остановки. Однако такой сценарий обычно реализуется редко, поскольку это свидетельствовало бы, что система не работает оптимально. В эффективной системе новый кусок пищевого продукта должен попадать в приемник как можно быстрее после его опорожнения.
Согласно другому варианту выполнения первого объекта блок определения содержит створку, смонтированную на выходном конце, причем указанная створка имеет первое положение, в котором она примыкает к выходному концу, когда в выходном конце отсутствует пищевой продукт, что позволяет блоку определения определить первый режим работы, и указанная створка отодвинута от выходного конца, когда передняя часть отдельного пищевого продукта присутствует в выходном конце, что позволяет блоку определения определить второй режим работы.
Для того чтобы добиться простого и эффективного контроля выходного конца системы подачи можно использовать створку. Створка может содержать пластину или схожую структуру, которая шарнирно установлена на верхней части выходного конца так, что она изначально лежит своей нижней частью на выходном конце. Когда первый отдельный пищевой продукт проходит к выходному концу и выступает своей передней частью за пределы выходного конца, он поворачивает створку наружу и отталкивает нижнюю часть пластины от выходного конца. Таким образом блок определения идентифицирует, что необходимо использовать второй режим работы. Первый пищевой продукт будет продолжать движение в направлении приемника с меньшей скоростью.
Согласно другому варианту выполнения первого объекта блок определения содержит створку, смонтированную на выходном конце, причем указанная створка находится в первом положении, в котором она примыкает к выходному концу, когда в выходном конце отсутствует пищевой продукт, что позволяет блоку определения определить первый режим работы, и указанная створка отодвинута от выходного конца, когда передняя часть отдельного пищевого продукта присутствует в выходном конце, что позволяет блоку определения определить второй режим работы, при этом указанная створка возвращается к указанному выходному концу, когда задняя часть отдельного пищевого продукта проходит через выходной конец, что позволяет блоку определения определять третий режим работы.
Когда первый отдельный пищевой продукт покинул или собирается покинуть выходной конец, створка поворачивается обратно к выходному концу. Это свидетельствует о том, что необходимо использовать третий режим работы, т.е. что подающий механизм должен быть остановлен для того, чтобы предотвратить выход второго пищевого продукта из выходного конца. Появление первого отдельного пищевого продукта в приемнике может подтверждаться, например, увеличением веса приемника. Поскольку приемник обычно образует чашу весов, определение не требует реальной модификации системы. В том редком случае, когда пищевой продукт отсутствует короткий период времени, возврат створки может быть обусловлен неправильной формой пищевого продукта и второй режим работы может быть возобновлен.
Если нижняя часть створки только частично возвращается к выходному концу, это может свидетельствовать, что второй пищевой продукт расположен в выходном конце. В этом случае подающий механизм останавливается и после опорожнения приемника система продолжает второй режим работы. Наоборот, если нижняя часть створки возвращается полностью в позицию, примыкающую к выходному концу, пищевой продукт отсутствует в выходном конце и после опорожнения приемника система продолжает первый режим работы.
Согласно другому варианту выполнения первого объекта блок определения содержит одно из следующих устройств: оптический блок определения, радиолокационный блок определения, механический блок определения или лазерный блок определения. Также могут предполагаться иные блоки определения, например блоки определения, не требующие контакта с пищевым продуктом, например оптические, такие как фотоэлемент, лазер, радиолокатор. С другой стороны, могут использоваться другие механические блоки определения, нежели описанная выше створка, например кнопки и т.п.
Согласно другому варианту выполнения первого аспекта вторая средняя скорость включает остановку подающего механизма в течение определенного периода времени, предпочтительно подающий механизм останавливают на период времени от 0.1 до 10 с. В настоящем контексте подразумевается средняя скорость, измеренная в относительно долгом периоде времени. В некоторых вариантах может использоваться двигатель, который имеет постоянную высокую скорость и меньшая средняя скорость достигается за счет остановки и запуска двигателя. Такой вариант может упростить блок управления двигателем.
Согласно другому варианту выполнения первого объекта подающий механизм системы подачи представляет собой ленточный конвейер, роликовый конвейер или вибрационный конвейер. Тип конвейера выбирается в зависимости от типа транспортируемого пищевого продукта.
Согласно другому варианту выполнения первого объекта подающий механизм содержит шнековый конвейер. В настоящем контексте использование шнекового конвейера предпочтительно. Преимущества шнекового конвейера описаны выше, а также известны из уровня техники, а именно из документа WO 2006/092148.
Согласно другому варианту выполнения первого аспекта шнековый конвейер является сменным с помощью защелкивающегося механизма. Легкозаменяемый шнековый конвейер обеспечивает легкую очистку системы и быструю адаптацию системы к различным пищевым продуктам, например большие шнеки для куриных грудок и маленькие шнеки для куриных крыльев.
Согласно другому варианту выполнения первого аспекта шнековый конвейер имеет увеличивающийся шаг вдоль его длины. Увеличивающийся шаг вдоль пути транспортирования между входом и выходом обеспечивает мягкую транспортировку материала продукта.
Согласно другому варианту выполнения первого аспекта шнековый конвейер образован винтовым стержнем. Винтовой стержень позволяет пищевому продукту проходить аккуратно и по хорошо определенному пути.
Согласно другому варианту выполнения первого аспекта винтовой стержень содержит сердечник или наоборот выполнен без сердечника. Наличие сердечника позволяет предотвратить падение материала продукта между витками винтового стержня. При этом шнековый конвейер без сердечника предотвращает возможность зажимания пищевого продукта между сердечником и винтовым стержнем. В некоторых вариантах сердечник может вращаться синхронно с винтовым стержнем или, наоборот, быть неподвижным.
Указанные потребности, цели, особенности и преимущества, а также многие другие потребности, цели, особенности и преимущества, очевидные из нижеследующего подробного описания настоящих и предпочтительных вариантов, достигаются благодаря характеристикам второго аспекта настоящего изобретения, характеризующего систему подачи для транспортировки и выдачи нескольких пищевых продуктов по одному, содержащую:
a) входной конец для приема пищевых продуктов, указанные пищевые продукты являются по существу твердыми, указанные пищевые продукты поступают навалом в указанный первый конец системы подачи отдельно или с по крайней мере частичным перекрытием,
b) выходной конец для выборочной выдачи пищевых продуктов по одному за раз,
c) приемник, расположенный ниже выходного конца, для приема указанного отдельного пищевого продукта при выдаче из выходного конца,
d) блок определения, расположенный на выходном конце, указанный блок определения выполнен с возможностью определения первого режима работы, когда пищевой продукт отсутствует в выходном конце и пищевой продукт отсутствует в приемнике, второго режим работы, когда первый отдельный пищевой продукт присутствует в выходном конце, но пищевой продукт отсутствует в приемнике, и третьего режима работы, когда первый отдельный пищевой продукт выходит из выходного конца или принимается в приемник,
e) подающий механизм, предназначенный для транспортировки пищевых продуктов от входного конца к выходному концу, причем подающий механизм:
i) в первом режиме работы подает пищевые продукты посредством подающего механизма в направлении от входного конца к выходному концу с первой средней скоростью,
ii) во втором режиме работы подает пищевые продукты посредством подающего механизма в направлении от входного конца к выходному концу со второй средней скоростью, причем указанная вторая средняя скорость меньше первой скорости,
iii) в третьем режиме работы останавливают подающий механизм до тех пор, пока первый отдельный пищевой продукт не покинет приемник.
Описанная система согласно второму объекту предпочтительно используется вместе с вышеописанным способом согласно первому объекту. Указанные потребности, цели, особенности и преимущества, а также многие другие потребности, цели, особенности и преимущества, очевидные из нижеследующего подробного описания настоящих и предпочтительных вариантов, достигаются благодаря характеристикам третьего аспекта настоящего изобретения, характеризующего многоголовочную систему взвешивания, содержащую множество подающих систем согласно второму объекту и приемную секцию для приема множества пищевых продуктов навалом, причем указанная приемная секция взаимодействует с каждым входным концом каждого распределительного устройства, а каждый указанный приемник каждого распределительного устройства образует чашу весов.
Приемная секция предпочтительно имеет коническую форму, чтобы поданные сверху пищевые продукты могли скользить в направлении входных концов распределительных устройств. Многоголовочная система взвешивания предпочтительно контролируется блоком управления, который контролирует вес пищевых продуктов, поступивших в приемник, и результат определения текущего режима работы. Блок управления на основе указанной информации контролирует опустошение приемника и скорость шнекового конвейера.
Согласно другому варианту выполнения третьего аспекта приемная секция расположена центрально, а множество распределительных устройств распределены вокруг центрально расположенной приемной секции.
В целях экономии пространства и для достижения равномерного распределения пищевых продуктов описанная круговая конфигурация многоголовочной системы взвешивания наиболее предпочтительна.
Краткое описание графических материалов
На фиг.1 представлены многоголовочные весы, содержащие систему подачи;
на фиг.2 - серия, демонстрирующая, как множество пищевых продуктов транспортируется системой подачи;
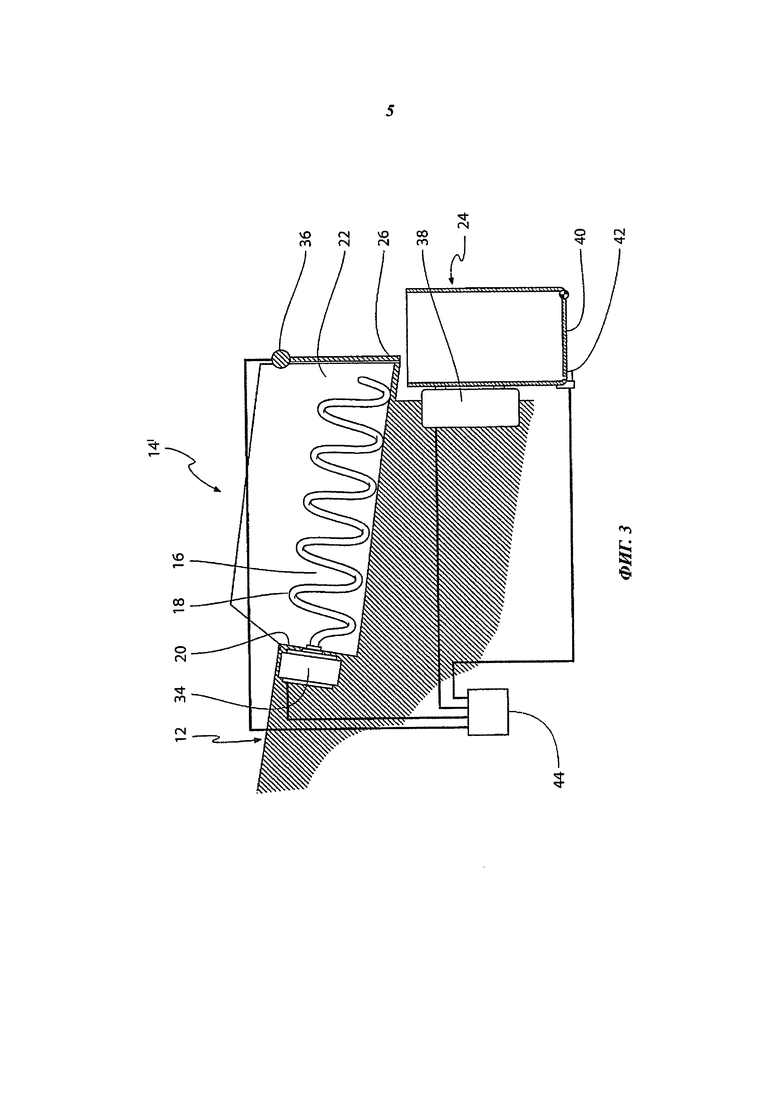
на фиг.3 - система подачи, содержащая блок управления;
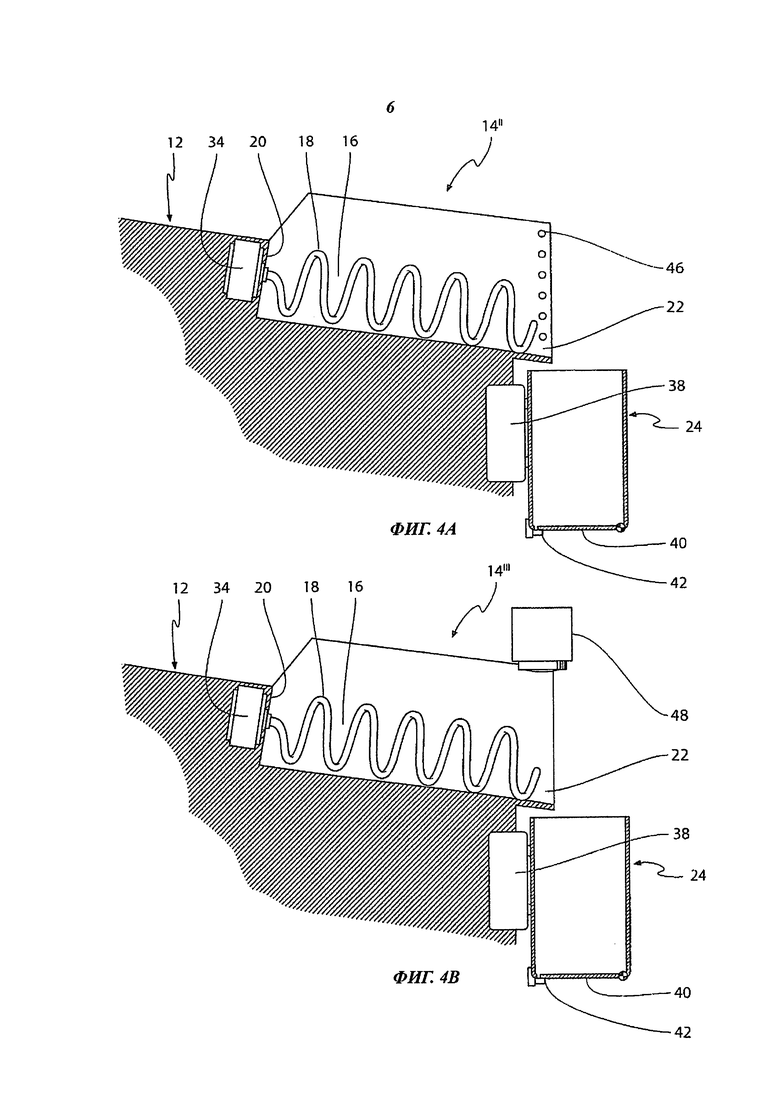
на фиг.4 - серия, демонстрирующая системы подачи с альтернативными блоками определения;
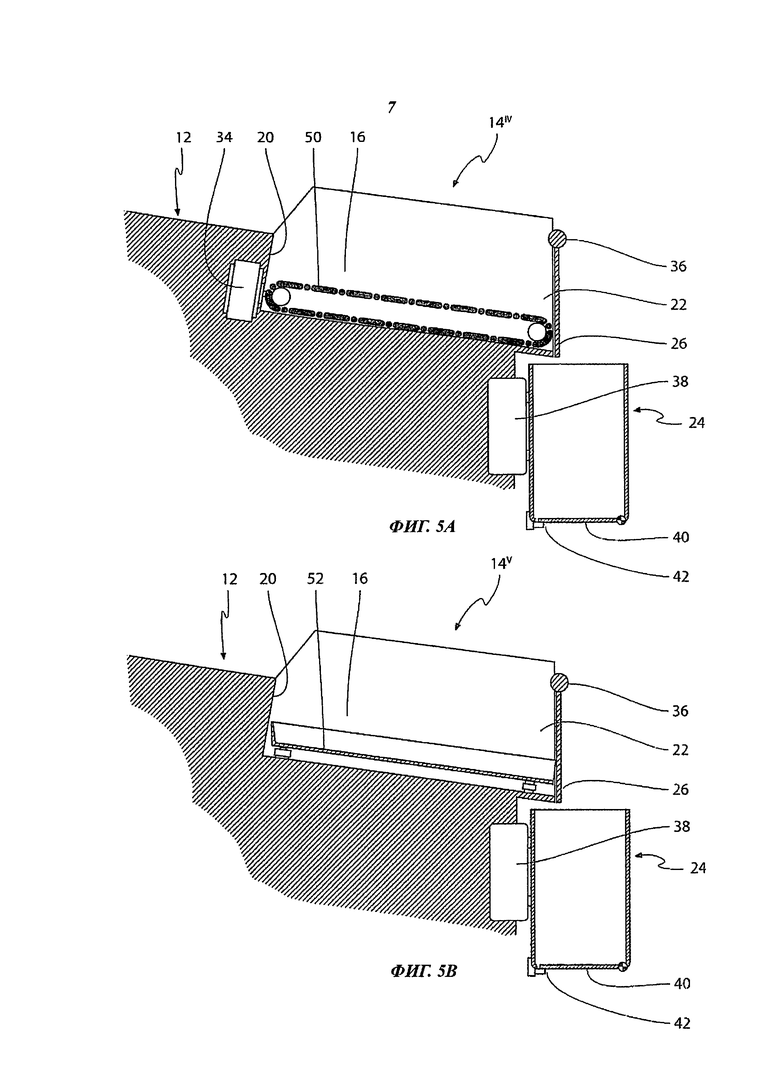
на фиг.5 - серия, демонстрирующая системы подачи с альтернативными подающими механизмами.
Осуществление изобретения
На фиг.1 представлена многоголовочная система взвешивания 10, содержащая приемную секцию 12 и систему подачи 14. Приемная секция 12 имеет коническую форму для направления пищевых продуктов, принимаемых сверху приемной секции 12. Пищевые продукты (не показаны) могут представлять собой липкие пищевые продукты, такие как куски птицы. Пищевые продукты обычно распределены случайным образом в приемной секции 12 и благодаря конической форме приемной секции 12 движутся в направлении периферии приемной секции 12. Приемная секция 12 может быть выполнена вращающейся для более однородного распределения пищевых продуктов по периферии приемной секции 12 и недопущения пищевым продуктам долгого пребывания в приемной секции. На периферии приемной секции 12 расположено множество систем подачи, все обозначены позицией 14. Каждая система подачи содержит подающий канал 16, в котором расположен шнековый конвейер 18. Шнековый конвейер обычно образован винтовым полым стержнем. Расстояние между двумя витками обычно соответствует размеру транспортируемого пищевого продукта, т.е. около 0.1 м в случае куриных грудок. Подающий канал 16 проходит от входного конца 20, примыкающего к приемной секции 12, до выходного конца 22, расположенного напротив входного конца 20. Под выходным концом 22 расположена чаша весов, образующая приемник 24. Выходной конец 22 подающего канала 16 закрыт поворотной створкой 26, которая более подробно описана ниже. Пищевые продукты, входящие в приемную секцию 12, случайным образом распределяются между системами подачи 14. Таким образом, отдельный пищевой продукт попадает во входной конец 20 одной системы подачи 14 и поводится вдоль подающего канала 16 посредством шнекового конвейера 18 в направлении выходного конца 22. Створка 26, которая образует часть блока определения, как будет более подробно показано при описании фиг.2, определяет присутствие пищевого продукта и позволяет отдельному пищевому продукту поступать в приемник 24. Приемник 24 затем опорожняется в полый короб 28, который ведет к желобу доставки 30. На практике содержимое двух или более приемников 24, содержимое которых в сумме имеет вес приблизительно соответствующий определенному целевому весу, опорожняются в желоб 30. Пищевые продукты, поступившие таким образом в подающий желоб 30, доставляются на упаковочную станцию (не показана), где скомбинированные пищевые продукты фасуются в отдельные упаковки.
На фиг.2А показан разрез системы 14 подачи в первом режиме работы. Подающий канал 16 системы 14 подачи содержит первый пищевой продукт 32 и второй пищевой продукт 32′, частично перекрывающийся с первым пищевым продуктом 32, оба пищевых продукта 32, 32′ транспортируются в направлении створки 26 посредством шнекового конвейера 18. Третий пищевой продукт 32 расположен на периферии приемной секции 12 у входного конца системы 14 подачи. Шнековый конвейер 18 приводится в движение электрическим двигателем 34. В представленном первом режиме работы ни один пищевой продукт не достиг выходного конца системы 14 подачи. Створка 26, которая подвешена на петле 26, расположенной у выходного конца 22, таким образом, не определяет наличия пищевых продуктов. При этом в первом режиме работы двигатель 34 приводит в движение шнековый конвейер 18 на большой скорости. Высокая скорость может быть достигнута при приведении шнекового конвейера во вращение со скоростью, например 0.5-5 оборотов в секунду. Приемник 24 поддерживается держателем 38 приемника, который также измеряет вес содержимого приемника 24. Нижняя часть приемника 24 закрыта дверцей 40. Дверца 40 удерживается в закрытом положении механизмом блокировки 42.
На фиг.2В представлена система подачи 14 во втором режиме работы. Система подачи переходит во второй режим работы, когда блок определения, содержащий створку 26 и петлю 36, обнаруживает присутствие первого пищевого продукта 32 в выходном конце 22 системы подачи 14. Наличие первого пищевого продукта 32 в выходном конце 22 обнаруживается по повороту створки 26 на петле 36 наружу. Во втором режиме работы двигатель 34 приводит в движение шнековый конвейер 18 на малой скорости. Малая скорость может быть достигнута при движении шнекового конвейера со скоростью, например, 0.1-0.5 оборотов в секунду. В другом варианте шнековый конвейер непрерывно движется с большей скоростью и останавливается на 0.5 с.
На фиг.2С представлена система подачи 14 во втором режиме работы. Во втором режиме работы первый пищевой продукт медленно прижимается к выходному концу 22 и отталкивает створку 26 от выходного конца 22. Когда первый пищевой продукт 32 покинет выходной конец 22, створка 26 начнет двигаться или поворачиваться обратно к выходному концу 22. В этот момент система 14 подачи переходит в третий режим работы, который более подробно описан ниже.
На фиг.2D представлена система подачи 14 в третьем режиме работы. В текущей ситуации первый пищевой продукт 32 покинул выходной конец 22 системы 14 подачи, створка 26 вернулась обратно к выходному концу 22, а двигатель 34, приводящий в движение шнековый конвейер 18, остановился, чтобы предотвратить выход второго пищевого продукта 32' из выходного конца 22 системы подачи 14. Первый пищевой продукт 32 поступает в нижнюю часть приемника 24.
На фиг.2Е представлена система подачи 14 при возврате от третьего режима работы ко второму режиму работы. Когда взвешивание завершено и дверца 40 открывается путем разблокирования механизма блокировки 42, первый пищевой продукт 32 покидает приемник 24. В представленной ситуации второй пищевой продукт 32' расположен в выходном конце 22 и поэтому возобновляется второй режим работы. Во втором режиме работы, как указано выше, двигатель 34 приводит в движение шнековый конвейер 18 на малых скоростях, что обозначено стрелкой. Дверца 40 закрывается как можно скорее после опорожнения первого пищевого продукта 32 для того, чтобы быть готовой к подаче второго пищевого продукта 32'.
На фиг.2F представлена система подачи 14 в другом варианте третьего режима работы. В представленном другом варианте третьего режима работы второй пищевой продукт 32' остается в приемнике 24, пока пищевой продукт отсутствует в выходном конце 22 системы 14 подачи. В представленной ситуации шнековый конвейер 18 не останавливается, вместо этого электрический двигатель 34 приводит в движение шнековый конвейер с высокой скоростью, такой же, как в первом режиме работы. Однако, если третий пищевой продукт 32”, расположенный в подающем канале 16, поступает в выходной конец 22 системы 14 подачи и тем самым отодвигает створку 26, шнековый конвейер останавливается, чтобы предотвратить попадание третьего пищевого продукта 32” в приемник 34 до того, как второй пищевой продукт 32′ покинет приемник 24.
На фиг.3 представлена система подачи 14I, содержащая блок управления 44. Блок управления 44 соединен с петлей 36 створки 26, двигателем 34 шнекового конвейера 18, держателем 38 приемника 24 и механизмом блокировки 42 дверцы 40. Таки образом блок управления 44 может определять угол и угловую скорость петли 36 и вес содержимого приемника 24. Эта информация может быть использована для контроля скорости двигателя 34 и блокировки и разблокировки механизма блокировки 42.
На фиг.4A представлен другой вариант системы подачи 40II. В другом варианте системы подачи 40II створка 26 и петля 36 заменены на фотоэлементы 46. Присутствие пищевого продукта в выходном конце 32 определяется фотоэлементами 46, вследствие чего включается второй режим работы.
На фиг.4B представлен другой вариант системы подачи 14III, в котором фотоэлементы заменены на различные электромагнитные блоки определения, такие как радиолокатор или лазер 48.
На фиг.5A представлен другой вариант системы подачи 14IV, в котором шнековый конвейер заменен на ленточный конвейер 50. Ленточный конвейер может быть более предпочтительным, если транспортируемые пищевые продукты очень уязвимые.
На фиг.5B представлен другой вариант системы подачи 14V, в котором ленточный конвейер заменен вибрационным конвейером. Вибрационные конвейеры, наоборот, могут быть использованы, если пищевые продукты очень твердые.
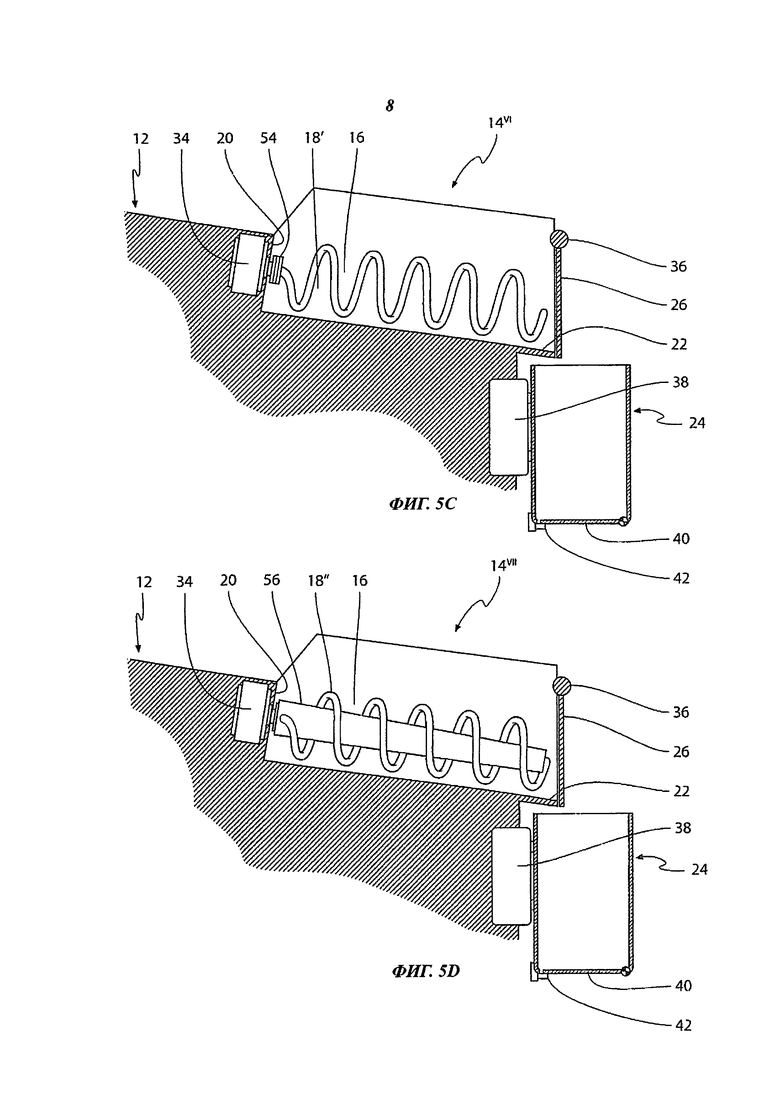
На фиг.5C представлен другой вариант системы подачи 14VI, в котором шнековый конвейер 18' соединен с двигателем 34 посредством защелкивающегося механизма 54. Соединение между осью двигателя и шнековым конвейером обычно содержит охватывающую часть, прикрепленную к концу оси двигателя, и охватываемую часть, прикрепленную к концу шнекового конвейера, или наоборот. Защелкивающийся механизм может быть, например, выполнен в виде известного байонетного соединения между двигателем и шнековым конвейером. Другой возможный вариант содержит пружину и выступающий шарик, расположенные на конце шнекового конвейера, и соответствующее углубление, выполненное на оси двигателя. Соединение между шнековым конвейером и осью достигается путем нажима и высвобождения шарика из соответствующего углубления, выполненного на оси двигателя.
На фиг.5D представлен другой вариант системы подачи 14VII, в котором шнековый конвейер 18” снабжен сердечником 56. Сердечник предохраняет любой пищевой продукт от попадания в нижнюю часть канала 16. Продукт, упавший между двумя витками шнекового конвейера 18 может застрять между низом канала 16 и шнековым конвейером. За счет наличия сердечника 56 все пищевые продукты транспортируются выше этого сердечника в верхней части шнекового конвейера 18”, благодаря чему пищевые продукты не застрянут.
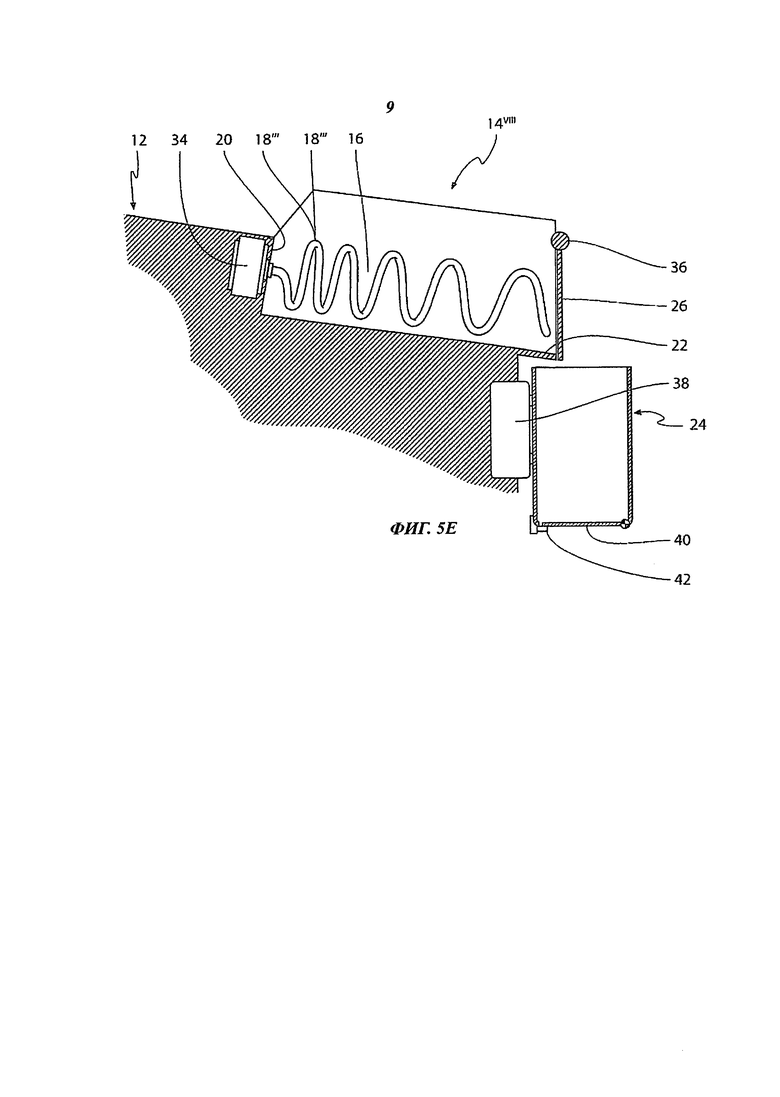
На фиг.5E представлен другой вариант системы подачи 14VIII, в котором шнековый конвейер 18”' имеет увеличивающийся шаг вдоль своей длины от входного конца 20 к выходному концу 22. За счет небольшого увеличения шага шнекового конвейера, т.е. увеличения расстояния между двумя витками шнека вдоль расстояния между входом и выходом, гарантируется, что ни один пищевой продукт не будет зажат между двумя витками шнека.
Настоящее изобретение не ограничивается описанными выше примерами, например увеличение радиуса системы и сохранение размеров приемников приведет к возможному увеличению числа приемников, а значит, к увеличению пропускной способности системы. Кроме того, вышеуказанные примеры касались только пищевых продуктов, тогда как предлагаемая техника также применима и к несъедобным продуктам.
Список номеров позиций на чертежах
10. Многоголовочная система взвешивания
12. Приемная секция
14. Система подачи
16. Подающий канал
18. Шнековый конвейер
20. Входной конец
22. Выходной конец
24. Приемник
26. Створка
28. Короб
30. Желоб доставки
32. Пищевой продукт
34. Электрический двигатель
36. Петля
38. Держатель приемника
40. Дверца
42. Механизм блокировки
44. Блок управления
46. Фотоэлементы
48. Радиолокатор/лазер
50. Ленточный конвейер
52. Вибрационный конвейер
54. Защелкивающийся механизм
56. Сердечник
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБЫ И СИСТЕМЫ ДЛЯ ВЗВЕШИВАНИЯ И СБОРА ТВЕРДЫХ ПИЩЕВЫХ ПРОДУКТОВ | 2018 |
|
RU2741487C1 |
| СПОСОБ СБОРА ТВЕРДЫХ ПИЩЕВЫХ ПРОДУКТОВ И СБОРНИК ДЛЯ СБОРА ТВЕРДЫХ ПИЩЕВЫХ ПРОДУКТОВ | 2021 |
|
RU2758212C1 |
| СПОСОБ ВЗВЕШИВАНИЯ И ФОРМИРОВАНИЯ ПАЧКИ ИЗДЕЛИЙ | 2019 |
|
RU2786501C1 |
| ФАСОВОЧНАЯ СИСТЕМА | 2013 |
|
RU2625482C2 |
| ВЗВЕШИВАЮЩЕЕ УСТРОЙСТВО | 2006 |
|
RU2550898C9 |
| ВЗВЕШИВАЮЩЕЕ УСТРОЙСТВО | 2006 |
|
RU2435145C2 |
| ВЗВЕШИВАЮЩЕЕ УСТРОЙСТВО | 2006 |
|
RU2668853C2 |
| ВЗВЕШИВАЮЩЕЕ УСТРОЙСТВО | 2006 |
|
RU2587639C2 |
| Технологическая линия для производства обратных водомасляных эмульсий для изготовления взрывчатых веществ | 2024 |
|
RU2837763C1 |
| ШНЕКОВЫЙ СУБЛИМАТОР | 2022 |
|
RU2814171C1 |
В способе используют систему подачи. Система подачи (14) содержит входной конец (20), выходной конец (22), приемник (24), расположенный под выходным концом, блок определения на выходном конце (22) и подающий механизм (18) для транспортировки продуктов от входного конца к выходному концу. Если продукты отсутствуют на выходе или в приемнике (24), то их транспортируют с первой средней скоростью. Если продукт присутствует в выходном конце (22), но продукты отсутствуют в приемнике (24), то продукты транспортируют со второй средней скоростью. Вторая средняя скорость ниже, чем первая средняя скорость. Если продукт покинул выходной конец или поступил в приемник (24), подающий механизм (18) останавливают до тех пор, пока отдельный продукт не покинет приемник. Многоголовочная система взвешивания содержит множество вышеописанных систем подачи и приемную секцию для приема множества продуктов навалом, причем приемная секция взаимодействует с каждым входным концом каждой системы подачи, а каждый приемник каждой системы подачи образует чашу весов. Группа изобретений обеспечивает повышение производительности. 3 н. и 12 з.п. ф-лы, 15 ил.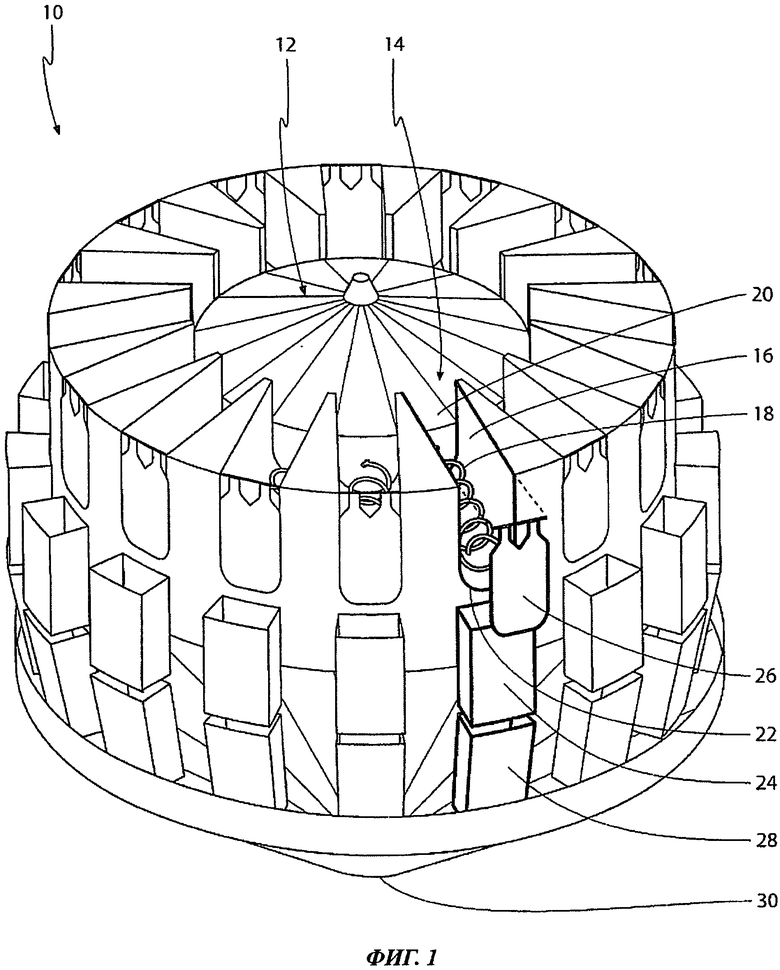
1. Способ транспортировки и выборочной выдачи нескольких пищевых продуктов по одному за один раз, включающий:
i) обеспечение системы подачи, причем указанная система подачи содержит:
a) входной конец для приема пищевых продуктов, указанные пищевые продукты являются по существу твердыми,
b) выходной конец для выборочной выдачи пищевых продуктов по одному за один раз,
c) приемник, расположенный ниже выходного конца, для приема отдельного пищевого продукта при выдаче из указанного выходного конца,
d) блок определения, расположенный на выходном конце, и
e) подающий механизм, предназначенный для транспортировки пищевых продуктов от входного конца к выходному концу,
ii) подачу пищевых продуктов навалом в указанный первый конец системы подачи отдельно или с по крайней мере частичным перекрытием,
iii) определение первого режима работы, когда пищевые продукты отсутствуют в выходном конце и пищевые продукты отсутствуют в приемнике,
iv) транспортировку в указанном первом режиме работы указанных пищевых продуктов посредством подающего механизма в направлении от входного конца к выходному концу с первой средней скоростью,
v) определение второго режима работы, когда отдельный пищевой продукт присутствует в выходном конце, но пищевые продукты отсутствуют в приемнике,
vi) транспортировку в указанном втором режиме работы указанных пищевых продуктов посредством подающего механизма в направлении от входного конца к выходному концу со второй средней скоростью, причем указанная вторая средняя скорость меньше первой скорости,
vii) определение третьего режима работы, когда указанный первый отдельный пищевой продукт выходит из выходного конца или принимается в приемник,
viii) остановку в указанном третьем режиме работы указанного подающего механизма до тех пор, пока первый отдельный пищевой продукт не покинет приемник.
2. Способ по п.1, отличающийся тем, что на этапе viii) перед остановкой и в случае отсутствия второго отдельного пищевого продукта в выходном конце в указанном третьем режиме работы транспортируют указанные пищевые продукты посредством подающего механизма в направлении от входного конца к выходному концу с первой средней скоростью до тех пор, пока второй отдельный пищевой продукт не будет присутствовать в выходном конце, а затем производят остановку.
3. Способ по п.1, отличающийся тем, что блок определения содержит створку, смонтированную на выходном конце, причем указанная створка имеет первое положение, в котором она примыкает к выходному концу, когда в выходном конце отсутствует пищевой продукт, что позволяет блоку определения определить первый режим работы, причем указанная створка отодвинута от выходного конца, когда передняя часть отдельного пищевого продукта присутствует в выходном конце, что позволяет блоку определения определить второй режим работы.
4. Способ по п.1, отличающийся тем, что блок определения содержит створку, смонтированную на выходном конце, причем указанная створка находится в первом положении, в котором она примыкает к выходному концу, когда в выходном конце отсутствует пищевой продукт, что позволяет блоку определения определить первый режим работы, и указанная створка отодвинута от выходного конца, когда передняя часть отдельного пищевого продукта присутствует в выходном конце, что позволяет блоку определения определить второй режим работы, при этом указанная створка возвращается к указанному выходному концу, когда задняя часть отдельного пищевого продукта проходит через выходной конец, что позволяет блоку определения определять третий режим работы.
5. Способ по п.1, отличающийся тем, что блок определения содержит одно из следующих устройств: оптический блок определения, радиолокационный блок определения, механический блок определения или лазерный блок определения.
6. Способ по п.1, отличающийся тем, что вторая средняя скорость включает остановку указанного подающего механизма в течение определенного периода времени, предпочтительно подающий механизм останавливают на период времени от 0.1 до 10 с.
7. Способ по п.1, отличающийся тем, что подающий механизм системы подачи представляет собой одно из устройств: ленточный конвейер, роликовый конвейер или вибрационный конвейер.
8. Способ по любому из пп.1-6, отличающийся тем, что подающий механизм содержит шнековый конвейер.
9. Способ по п.8, отличающийся тем, что шнековый конвейер является сменным посредством защелкивающегося механизма.
10. Способ по п.8, отличающийся тем, что шнековый конвейер имеет увеличивающийся шаг вдоль его длины.
11. Способ по п.8, отличающийся тем, что шнековый конвейер образован винтовым стержнем.
12. Способ по п.11, отличающийся тем, что винтовой стержень содержит сердечник или наоборот выполнен без сердечника.
13. Система подачи для транспортировки и выдачи нескольких пищевых продуктов по одному за раз, содержащая:
a) входной конец для приема пищевых продуктов, указанные пищевые продукты являются по существу твердыми, указанные пищевые продукты поступают навалом в указанный первый конец системы подачи отдельно или с по крайней мере частичным перекрытием,
b) выходной конец для выборочной выдачи пищевых продуктов по одному за раз,
c) приемник, расположенный ниже выходного конца, для приема указанного отдельного пищевого продукта при выдаче из выходного конца,
d) блок определения, расположенный на выходном конце, указанный блок определения выполнен с возможностью определения первого режима работы, когда пищевой продукт отсутствует в выходном конце и пищевой продукт отсутствует в приемнике, второго режима работы, когда первый отдельный пищевой продукт присутствует в выходном конце, но пищевой продукт отсутствует в приемнике, и третьего режима работы, когда первый отдельный пищевой продукт выходит из выходного конца или принимается в приемник,
e) подающий механизм, предназначенный для транспортировки пищевых продуктов от входного конца к выходному концу, причем подающий механизм:
i) в первом режиме работы подает пищевые продукты посредством подающего механизма в направлении от входного конца к выходному концу с первой средней скоростью,
ii) во втором режиме работы подает пищевые продукты посредством подающего механизма в направлении от входного конца к выходному концу со второй средней скоростью, причем указанная вторая средняя скорость меньше первой скорости,
iii) в третьем режиме работы останавливают подающий механизм до тех пор, пока первый отдельный пищевой продукт не покинет приемник.
14. Многоголовочная система взвешивания, содержащая множество систем подачи по п.13 и приемную секцию для приема множества пищевых продуктов навалом, причем указанная приемная секция взаимодействует с каждым входным концом каждой системы подачи, причем каждый указанный приемник каждой системы подачи образует чашу весов.
15. Многоголовочная система взвешивания по п.14, в которой указанная приемная секция расположена центрально, а множество систем подачи распределены вокруг центрально расположенной приемной секции.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| US 5813195 A, 29.09.1998 | |||
| Устройство для дозирования штучных предметов | 1973 |
|
SU483307A1 |

