Перекрестная ссылка на родственную заявку
Данная заявка испрашивает приоритет Патентной заявки Китая No.201210230078.3, зарегистрированной 4 июля 2012 г. в Государственном ведомстве по интеллектуальной собственности Китая, полное содержание которой включено в настоящее описание путем ссылки.
Область техники, к которой относится изобретение
Настоящее изобретение относится к области техники лучевого контроля, конкретнее, относится к конфигурации гентри для составной мобильной системы лучевого контроля.
Уровень техники
На предшествующем уровне техники рамочная составная мобильная система лучевого контроля представляет собой крупногабаритную систему лучевого контроля контейнеров/транспортных средств, основополагающей технологией функционирования которой является технология лучевой визуализации. Рамочная составная мобильная система лучевого контроля контейнеров/транспортных средств представляет собой систему лучевого контроля контейнеров/транспортных средств для обеспечения безопасности, используемую в морских портах, на границе, в аэропортах и т.д. и имеющую специальную модульную конструкцию, а потому ее можно легко собрать и разобрать, не прибегая к необходимости создания неподвижно закрепленной защитной конструкции и не прибегая к необходимости создания стенки для защиты от излучения. Визуализирующее устройство рамочной составной мобильной системы лучевого контроля контейнеров/транспортных средств представляет собой консольную раму гентри. Контейнер/транспортное средство, которое требуется досмотреть, располагают под консольной рамой гентри посередине между закрепленными рельсами. Консольная рама гентри перемещается по закрепленным рельсам. Луч, испущенный источником излучения, установленным на консольной раме одной стороны, проходит сквозь инспектируемый контейнер/транспортное средство, после чего принимается и обрабатывается детектором, установленным на консольной раме другой стороны, чтобы создать сканированное изображение.
Консольная рама гентри перемещается по закрепленным рельсам и «привязана» к закрепленным рельсам, в результате чего она по существу не может сойти с закрепленных рельсов. Таким образом, на предшествующем уровне техники проблема синхронизации в отношении скоростей перемещения консольных рам обеих сторон, в общем, не рассматривается.
Однако в процессе реального инспектирования все же требуется, чтобы скорости перемещения консольных рам обеих сторон были согласованы между собой, когда консольная рама гентри перемещается по закрепленным рельсам. Если скорости перемещения консольных рам обеих сторон различны, консольная рама гентри подвергается силовому воздействию и деформируется. Хотя деформация консольной рамы гентри может быть очень малой, она все же оказывает большое влияние на точность системы детектирования излучения. Если консольная рама гентри деформируется, детектор излучения не может принимать полный луч, а значит, качество визуализации будет снижено. Таким образом, необходимо контролировать позиционную погрешность между рамами обеих сторон посредством системы автоматической коррекции отклонений в процессе перемещения консольной рамы гентри по закрепленным рельсам, чтобы получить точное сканированное изображение.
На предшествующем уровне техники коррекция отклонений консольной рамы гентри главным образом достигалась вручную, при этом средство коррекции отклонений и средство контроля синхронизации не были предусмотрены. Вследствие ошибок, допущенных в процессе механического производства, погрешности скорости вращения двигателя и т.д., эффект от ручной коррекции отклонений неоптимален. Таким образом, необходимо усовершенствовать коррекцию отклонений консольной рамы гентри предшествующего уровня техники.
Раскрытие изобретения
Настоящее изобретение призвано устранить или частично устранить вышеупомянутые недостатки, по меньшей мере, в одном аспекте.
Согласно одному аспекту настоящего изобретения предложена конфигурация (компоновка) гентри для составной мобильной системы лучевого контроля, содержащая: первую консольную раму, выполненную с возможностью перемещения вдоль первого рельса; вторую консольную раму, противоположную первой консольной раме, выполненную с возможностью перемещения вдоль второго рельса, параллельного первому рельсу; а также третью консольную раму, соединяющую первую и вторую консольные рамы, так чтобы перемещаться с первой и второй консольными рамами. Первая, вторая и третья консольные рамы вместе образуют канал сканирования, чтобы позволить инспектируемому объекту пройти через него. Конфигурация гентри для составной мобильной системы лучевого контроля дополнительно содержит устройство измерения положения, выполненное с возможностью детектирования позиционной погрешности между первой консольной рамой и второй консольной рамой, а также контроллер, выполненный с возможностью управления скоростью перемещения, по меньшей мере, одной из первой и второй консольных рам на основе обнаруженной позиционной погрешности, так чтобы позиционная погрешность между первой консольной рамой и второй консольной рамой стала равной нулю.
Согласно предпочтительному варианту осуществления настоящего изобретения на одной из первой и второй консольных рам предусмотрен лазерный указатель, а на другой из первой и второй консольных рам предусмотрено позиционно-чувствительное устройство. Позиционно-чувствительное устройство выполнено с возможностью детектирования фактического положения лазерного луча, испущенного лазерным указателем, излученного на позиционно-чувствительное устройство. Позиционная погрешность между первой консольной рамой и второй консольной рамой определяется согласно разности между фактическим положением и заданным целевым положением. Когда лазерный луч, испущенный лазерным указателем, излучается в заданное целевое положение на позиционно-чувствительном устройстве, позиционная погрешность между первой консольной рамой и второй консольной рамой считается равной нулю.
Согласно другому предпочтительному варианту осуществления настоящего изобретения на одной из первой и второй консольных рам установлен источник излучения и выполнен с возможностью испускания луча на инспектируемый объект, проходящий через канал сканирования, а на другой из первой и второй консольных рам установлен детектор излучения и выполнен с возможностью приема луча, испущенного источником излучения.
Согласно другому предпочтительному варианту осуществления настоящего изобретения на первой консольной раме или второй консольной раме предусмотрен контроллер.
Согласно другому предпочтительному варианту осуществления настоящего изобретения контроллер рассчитывает целевую скорость вращения электрического двигателя для приведения первой или второй консольной рамы в движение на основе позиционной погрешности, обнаруженной устройством измерения, при этом контроллер управляет электрическим двигателем, чтобы привести во вращение с рассчитанной целевой скоростью вращения, чтобы свести позиционную погрешность между первой консольной рамой и второй консольной рамой к нулю.
Согласно другому предпочтительному варианту осуществления настоящего изобретения контроллер рассчитывает целевую скорость вращения электрического двигателя на основе позиционной погрешности посредством PID-алгоритма.
Согласно другому предпочтительному варианту осуществления настоящего изобретения на первой консольной раме или второй консольной раме предусмотрен преобразователь частоты, предназначенный для управления скоростью вращения электрического двигателя, при этом целевая скорость вращения используется в качестве командного значения для управления электрическим двигателем с помощью преобразователя частоты.
Согласно другому предпочтительному варианту осуществления настоящего изобретения на первой консольной раме или второй консольной раме предусмотрен кодер, предназначенный для распознавания фактической скорости вращения электрического двигателя, при этом контроллер управляет скоростью вращения электрического двигателя на основе разности скоростей вращения между целевой скоростью вращения и фактической скоростью вращения, распознанной кодером, так что скорость вращения электрического двигателя регулируется, чтобы стать равной целевой скорости вращения.
Согласно другому предпочтительному варианту осуществления настоящего изобретения контроллер управляет скоростью вращения электрического двигателя на основе разности скоростей вращения посредством PID-алгоритма.
Согласно другому предпочтительному варианту осуществления настоящего изобретения контроллер выполнен в виде программируемого логического контроллера.
Согласно другому предпочтительному варианту осуществления настоящего изобретения консольная рама, на которой установлен детектор излучения, содержит свинец для защиты от излучения.
Согласно другому предпочтительному варианту осуществления настоящего изобретения первая, вторая и третья консольные рамы разъемно собраны между собой.
Согласно другому предпочтительному варианту осуществления настоящего изобретения первая и вторая консольные рамы продолжаются в вертикальном направлении, а третья консольная рама продолжается в горизонтальном направлении.
По сравнению с предшествующим уровнем техники настоящее изобретение предпочтительно, по меньшей мере, в том, что на консольной раме гентри предусмотрено устройство автоматической коррекции отклонений, а значит, позиционная погрешность между рамами обеих сторон может автоматически сводиться к нулю, так что можно эффективно предотвратить подвергание консольной рамы гентри воздействию силовых нагрузок и деформированию, при этом детектор излучения может принимать полный луч, тем самым повышая качество визуализации.
Краткое описание чертежей
На Фиг. 1 показан пояснительный вид в перспективе конфигурации гентри для составной мобильной системы лучевого контроля согласно одному варианту осуществления настоящего изобретения;
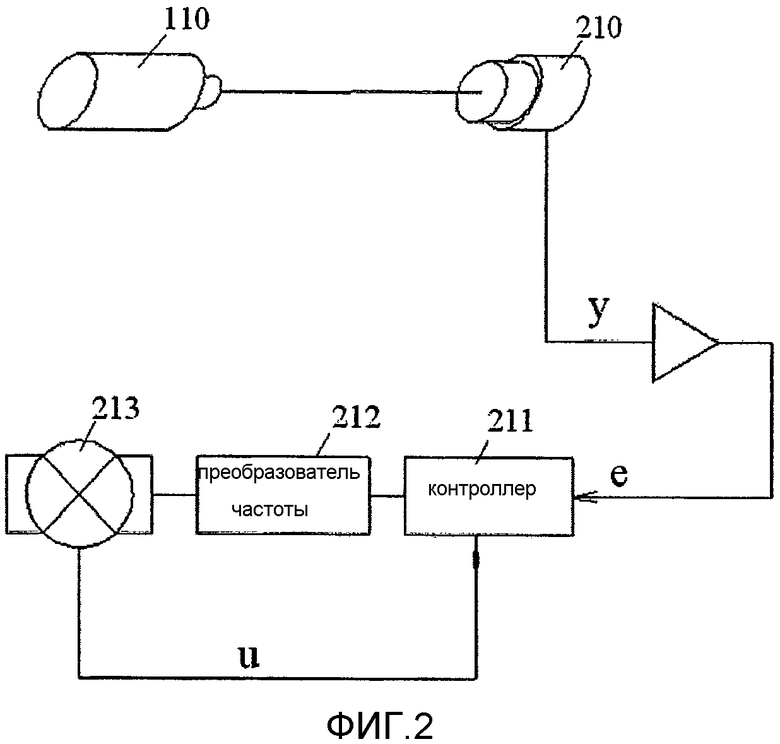
на Фиг. 2 показан способ управления конфигурацией гентри для составной мобильной системы лучевого контроля, представленной на Фиг. 1;
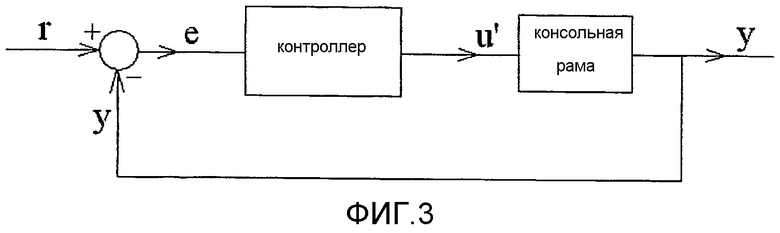
на Фиг. 3 показан вид схемы управления, предназначенной для управления позиционной погрешностью между первой консольной рамой и второй консольной рамой в конфигурации гентри для составной мобильной системы лучевого контроля, представленной на Фиг. 1;
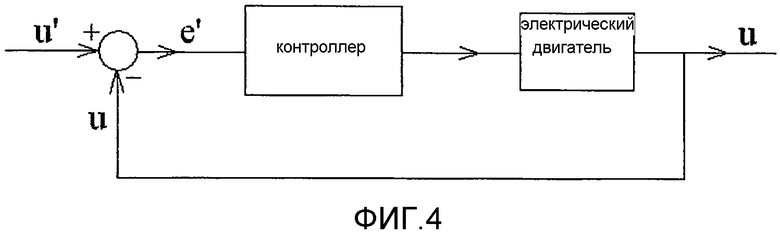
на Фиг. 4 показан вид схемы управления, предназначенной для управления скоростью вращения электрического двигателя для приведения в движение второй консольной рамы в конфигурации гентри для составной мобильной системы лучевого контроля, представленной на Фиг. 1.
Осуществление изобретения
Примеры осуществления по настоящему раскрытию будут подробно описаны ниже со ссылкой на прилагаемые чертежи, на которых одинаковые ссылочные позиции относятся к одинаковым элементам. Настоящее раскрытие, однако, предполагает различные формы осуществления и не должно рассматриваться как ограниченное вариантами осуществления, изложенными в настоящем описании; эти варианты осуществления служат тому, чтобы настоящее раскрытие было всесторонним и полным, а также в полной мере передало идею изобретения специалистам в данной области техники.
На Фиг. 1 показан пояснительный вид в перспективе конфигурации гентри для составной мобильной системы лучевого контроля согласно одному варианту осуществления настоящего изобретения.
Как показано на Фиг. 1, в одном варианте осуществления настоящего изобретения конфигурация гентри для составной мобильной системы лучевого контроля главным образом содержит первую консольную раму 100, вторую консольную раму 200 и третью консольную раму 300.
Как показано на Фиг. 1, первая консольная рама 100 перемещается по первому рельсу 101 посредством колес 102, предусмотренных в нижней части первой консольной рамы 100. Вторая консольная рама 200, противоположная первой консольной раме 100, расположена параллельно первой консольной раме 100 на некотором расстоянии от нее. Вторая консольная рама 200 перемещается по второму рельсу 201, параллельному первому рельсу 101, посредством колес 202, предусмотренных в нижней части второй консольной рамы 200. Третья консольная рама 300 соединяет первую и вторую консольные рамы 100, 200, чтобы перемещаться с первой и второй консольными рамами 100, 200. Таким образом, первая, вторая и третья консольные рамы 100, 200, 300 вместе образуют канал сканирования, чтобы позволить инспектируемому объекту пройти через него.
В предпочтительном варианте осуществления настоящего изобретения первая, вторая и третья консольные рамы 100, 200, 300 разъемно собраны между собой. Таким образом, всю систему лучевого контроля можно легко разобрать, собрать и отгрузить.
В предпочтительном варианте осуществления, представленном на Фиг. 1, первая и вторая консольные рамы 100, 200 представляют собой вертикальные консольные рамы, продолжающиеся в вертикальном направлении, а третья консольная рама 300 представляет собой горизонтальную консольную раму, продолжающуюся в горизонтальном направлении. Таким образом образована прямоугольная конструкция гентри.
Хотя это не показано, источник излучения установлен на одной из первой и второй консольных рам 100, 200. Источник излучения выполнен с возможностью испускания луча на инспектируемый объект (не показан), проходящий через канал сканирования. Кроме того, на другой из первой и второй консольных рам 100, 200 установлен детектор излучения. Детектор излучения выполнен с возможностью приема луча, испущенного источником излучения.
Следует отметить, что в настоящем описании позиционная погрешность (разность положений) между первой консольной рамой 100 и второй консольной рамой 200 в направлении их перемещения (в направлении прохождения рельсов) должна быть равна нулю, чтобы детектор излучения мог принимать полный луч, испущенный источником излучения.
Однако на практике, поскольку первая консольная рама 100 и вторая консольная рама 200 передвигаются по отдельности, скорости перемещения первой консольной рамы 100 и второй консольной рамы 200 вероятно станут разными. В этих условиях возникнет позиционная погрешность или разность положений между первой консольной рамой 100 и второй консольной рамой 200. Чтобы разрешить эту проблему, следует поддерживать скорости перемещения первой консольной рамы 100 и второй консольной рамы 200 одинаковыми во времени.
На Фиг. 2 показан способ управления конфигурацией гентри для составной мобильной системы лучевого контроля, представленной на Фиг. 1.
Как показано на Фиг. 1-2, чтобы поддерживать скорости перемещения первой консольной рамы 100 и второй консольной рамы 200 одинаковыми во времени, конфигурация гентри для составной мобильной системы лучевого контроля согласно настоящему изобретению дополнительно содержит устройство 110, 210 измерения положения, а также контроллер 211.
Как показано на Фиг. 1-2, устройство 110, 210 измерения положения выполнено с возможностью обнаружения позиционной погрешности (разности положений) между первой консольной рамой 100 и второй консольной рамой 200. Контроллер 211 выполнен с возможностью управления скоростью перемещения, по меньшей мере, первой консольной рамы 100 или второй консольной рамы 200 на основе обнаруженной позиционной погрешности e, так чтобы позиционная погрешность e между первой консольной рамой 100 и второй консольной рамой 200 стала равной нулю.
Как показано на Фиг.1-2, в предпочтительном варианте осуществления настоящего изобретения устройство 110, 210 измерения положения содержит лазерный указатель 110, установленный на одной (например, первой консольной раме 100) из первой и второй консольных рам 100, 200, а также позиционно-чувствительное устройство 210, установленное на другой (например, второй раме 200) из первой и второй консольных рам 100, 200.
Однако в настоящем изобретении устройство измерения положения не ограничено представленными вариантами осуществления, например, устройство измерения положения может содержать датчик деформации для обнаружения деформации горизонтальной третьей консольной рамы 300, при этом разность положений между первой консольной рамой 100 и второй консольной рамой 200 может быть получена на основе деформации, обнаруженной датчиком деформации.
В представленном варианте осуществления лазерный указатель 110 установлен на первой консольной раме 100, а позиционно-чувствительное устройство 210 установлено на второй консольной раме 200.
На Фиг. 3 показан вид схемы управления, предназначенной для управления позиционной погрешностью между первой консольной рамой и второй консольной рамой в конфигурации гентри для составной мобильной системы лучевого контроля, представленной на Фиг. 1.
Как показано на Фиг. 1-3, лазерный указатель 110 выполнен с возможностью испускания лазерного луча в направлении позиционно-чувствительного устройства 210, при этом позиционно-чувствительное устройство 210 выполнено с возможностью детектирования фактического положения y лазерного луча, испущенного лазерным указателем 110, излученного на позиционно-чувствительное устройство 210. В результате позиционная погрешность e между первой консольной рамой 100 и второй консольной рамой 200 определяется согласно разности между фактическим положением y и заданным целевым положением r.
Следует отметить, что в настоящем изобретении, когда лазерный луч, испущенный лазерным указателем 110, излучается в заданное целевое положение (например, центральное положение) r на позиционно-чувствительном устройстве 210, позиционная погрешность e между первой консольной рамой 100 и второй консольной рамой 200 считается равной нулю. Иными словами, в этих условиях детектор излучения принимает полный луч, испущенный источником излучения.
В одном варианте осуществления настоящего изобретения контроллер 211 может быть установлен на первой консольной раме 100 или второй консольной раме 200. В варианте осуществления, представленном на Фиг. 1, контроллер 211 установлен на второй консольной раме 200.
В одном варианте осуществления настоящего изобретения контроллер 211 рассчитывает целевую скорость u' вращения электрического двигателя для приведения первой или второй консольной рамы 100 или 200 в движение на основе позиционной погрешности e, обнаруженной устройством 110, 210 измерения. Затем контроллер 211 управляет электрическим двигателем, чтобы он вращался с рассчитанной целевой скоростью u' вращения, так чтобы свести позиционную погрешность e между первой консольной рамой 100 и второй консольной рамой 200 к нулю.
В представленном варианте осуществления контроллер 211 рассчитывает целевую скорость u' вращения электрического двигателя для приведения в движение второй консольной рамы 200 на основе позиционной погрешности e, обнаруженной устройством 110, 210 измерения. Затем контроллер 211 управляет электрическим двигателем, чтобы он вращался с рассчитанной целевой скоростью u' вращения, так чтобы свести позиционную погрешность e между первой консольной рамой 100 и второй консольной рамой 200 к нулю. Иными словами, в данном варианте осуществления настоящего изобретения позиционная погрешность между первой и второй консольными рамами 100, 200 сводится к нулю путем управления скоростью перемещения первой консольной рамы 100 или второй консольной рамы 200. Однако настоящее изобретение этим не ограничивается, при этом позиционная погрешность между первой и второй консольными рамами 100, 200 может быть сведена к нулю путем управления скоростями перемещения обеих первой и второй консольных рам 100, 200 одновременно.
В предпочтительном варианте осуществления настоящего изобретения контроллер 211 рассчитывает целевую скорость u' вращения электрического двигателя на основе позиционной погрешности e посредством PID (Пропорционально-Интегрально-Дифференциальное регулирование) алгоритма.
Поскольку PID-алгоритм является стандартным алгоритмом управления, для краткости изложения его подробное описание опущено.
В одном варианте осуществления настоящего изобретения на первой консольной раме 100 или второй консольной раме 200 предусмотрен преобразователь частоты 212, предназначенный для управления скоростью вращения электрического двигателя. Выходной сигнал целевой скорости u' вращения, поступающий с контроллера 211, используется в качестве входного командного значения для преобразователя 212 частоты с целью управления электрическим двигателем.
В варианте осуществления, представленном на Фиг. 1, преобразователь 212 частоты установлен на второй консольной раме 200 и выполнен с возможностью управления скоростью вращения электрического двигателя для приведения в движение второй консольной рамы 200.
В одном варианте осуществления настоящего изобретения на первой консольной раме 100 или второй консольной раме 200 предусмотрен кодер 213, предназначенный для распознавания фактической скорости u вращения электрического двигателя.
В варианте осуществления, представленном на Фиг. 1-2, кодер 213 установлен на второй консольной раме 200 и выполнен с возможностью распознавания фактической скорости u вращения электрического двигателя для приведения в движение второй консольной рамы 200.
На Фиг. 4 показан вид схемы управления, предназначенной для управления скоростью вращения электрического двигателя для приведения в движение второй консольной рамы в конфигурации гентри для составной мобильной системы лучевого контроля, представленной на Фиг.1.
Как показано на Фиг. 2 и 4, контроллер 211 управляет скоростью вращения электрического двигателя на основе разности e' скоростей вращения между целевой скоростью u' вращения и фактической скоростью u вращения, распознанной кодером 213, так что скорость вращения электрического двигателя регулируется, чтобы стать равной целевой скорости u' вращения.
В предпочтительном варианте осуществления настоящего изобретения контроллер 211 управляет скоростью вращения электрического двигателя на основе разности e' скоростей вращения посредством PID-алгоритма.
В одном варианте осуществления настоящего изобретения контроллер может представлять собой программируемый логический контроллер, микрокомпьютер на одной микросхеме или персональный компьютер.
Чтобы не допустить утечки излучения, испущенного источником излучения, как показано на Фиг. 1, в первую или вторую консольную раму 100, 200, на которой установлен детектор излучения, введен свинец для защиты от излучения. Однако настоящее изобретение этим не ограничивается, при этом первая или вторая консольная рама 100, 200, на которой установлен детектор излучения, может быть выполнена непосредственно из материала для защиты от излучения.
Хотя показан и описан ряд примеров осуществления, специалистам в данной области техники будет понятно, что в этих вариантах осуществления могут быть выполнены различные изменения и модификации в пределах объема изобретения, при этом сам же объем определяется формулой изобретения и ее эквивалентами.
| название | год | авторы | номер документа |
|---|---|---|---|
| САМОХОДНАЯ СИСТЕМА ЛУЧЕВОГО КОНТРОЛЯ | 2013 |
|
RU2590331C1 |
| СИСТЕМА ПОЗИЦИОНИРОВАНИЯ ПАЦИЕНТА ДЛЯ СИСТЕМ РАДИАЦИОННОЙ ТЕРАПИИ | 2004 |
|
RU2342172C2 |
| СИСТЕМЫ И СПОСОБЫ ДЛЯ ЦИФРОВОЙ РАДИОГРАФИИ | 2018 |
|
RU2773442C2 |
| СИСТЕМА КОНТРОЛЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2014 |
|
RU2654912C1 |
| МОДУЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ПАЦИЕНТА | 2004 |
|
RU2360716C2 |
| СИСТЕМА ПЛАНИРОВАНИЯ ЛУЧЕВОЙ ТЕРАПИИ И ПОСЛЕДУЮЩЕГО НАБЛЮДЕНИЯ С ШИРОКОКАНАЛЬНОЙ РАДИУНОКЛИДНОЙ И МАГНИТНО-РЕЗОНАНСНОЙ ВИЗУАЛИЗАЦИЕЙ ИЛИ ШИРОКОКАНАЛЬНОЙ КОМПЬЮТЕРНОЙ ТОМОГРАФИЕЙ И МАГНИТНО-РЕЗОНАНСНОЙ ВИЗУАЛИЗАЦИЕЙ | 2011 |
|
RU2587077C2 |
| УСТРОЙСТВО И СПОСОБ ЛУЧЕВОЙ СКАНИРУЮЩЕЙ ВИЗУАЛИЗАЦИИ | 2012 |
|
RU2571170C1 |
| ВЫЧИСЛЕНИЕ ДОЗЫ НА УРОВНЕ СЕГМЕНТОВ ПУЧКА И ОТСЛЕЖИВАНИЕ ДВИЖЕНИЯ ВО ВРЕМЕНИ ДЛЯ АДАПТИВНОГО ПЛАНИРОВАНИЯ ЛЕЧЕНИЯ | 2012 |
|
RU2629235C2 |
| ЛИНЕЙНЫЙ УСКОРИТЕЛЬ И УСТРОЙСТВО ДЛЯ ЕГО РЕГУЛИРОВКИ | 2006 |
|
RU2367123C1 |
| МОДУЛЬ ОТОБРАЖЕНИЯ И СИСТЕМА ОТОБРАЖЕНИЯ | 2011 |
|
RU2568576C2 |
Использование: для контроля объекта посредством проникающего излучения. Сущность изобретения заключается в том, что конфигурация гентри для составной мобильной системы лучевого контроля содержит первую консольную раму, выполненную с возможностью перемещения вдоль первого рельса, вторую консольную раму, противоположную первой консольной раме, выполненную с возможностью перемещения вдоль второго рельса, параллельного первому рельсу, и третью консольную раму, соединяющую первую и вторую консольные рамы, чтобы перемещаться с первой и второй консольными рамами, при этом первая, вторая и третья консольные рамы вместе образуют канал сканирования, чтобы позволить инспектируемому объекту пройти через него, при этом конфигурация гентри для составной мобильной системы лучевого контроля дополнительно содержит устройство измерения положения, выполненное с возможностью обнаружения позиционной погрешности между первой консольной рамой и второй консольной рамой, и контроллер, выполненный с возможностью управления скоростью перемещения, по меньшей мере, одной из первой консольной рамы и второй консольной рамы на основе позиционной погрешности, обнаруженной устройством измерения положения, с тем чтобы позиционная погрешность между первой консольной рамой и второй консольной рамой стала равной нулю. Технический результат: обеспечение возможности контроля позиционной погрешности между рамами обеих сторон посредством системы автоматической коррекции отклонений в процессе перемещения консольной рамы гентри по закрепленным рельсам с тем, чтобы получить точное сканированное изображение. 12 з.п. ф-лы, 4 ил.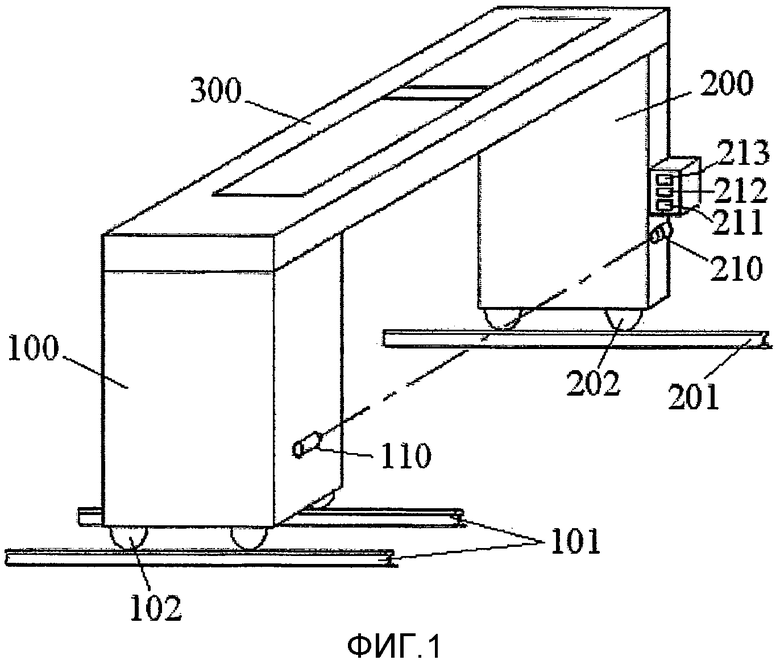
1. Конфигурация гентри для составной мобильной системы лучевого контроля, содержащая:
первую консольную раму (100), выполненную с возможностью перемещения вдоль первого рельса (101);
вторую консольную раму (200), противоположную первой консольной раме (100), выполненную с возможностью перемещения вдоль второго рельса (201), параллельного первому рельсу (101); и
третью консольную раму (300), соединяющую первую и вторую консольные рамы (100, 200), чтобы перемещаться с первой и второй консольными рамами (100, 200),
при этом первая, вторая и третья консольные рамы (100, 200, 300) вместе образуют канал сканирования, чтобы позволить инспектируемому объекту пройти через него,
при этом конфигурация гентри для составной мобильной системы лучевого контроля дополнительно содержит:
устройство (110, 210) измерения положения, выполненное с возможностью обнаружения позиционной погрешности (e) между первой консольной рамой (100) и второй консольной рамой (200); и
контроллер (211), выполненный с возможностью управления скоростью перемещения, по меньшей мере, одной из первой консольной рамы (100) и второй консольной рамы (200) на основе позиционной погрешности (e), обнаруженной устройством (110, 210) измерения положения, с тем чтобы позиционная погрешность (e) между первой консольной рамой (100) и второй консольной рамой (200) стала равной нулю.
2. Конфигурация гентри для составной мобильной системы лучевого контроля по п. 1,
в которой на одной из первой консольной рамы (100) и второй консольной рамы (200) предусмотрен лазерный указатель (110), а на другой из первой консольной рамы (100) и второй консольной рамы (200) предусмотрено позиционно-чувствительное устройство (210),
при этом позиционно-чувствительное устройство (210) выполнено с возможностью детектирования фактического положения (y) лазерного луча, испущенного лазерным указателем (110), излученного на позиционно-чувствительное устройство (210),
при этом позиционная погрешность (e) между первой консольной рамой (100) и второй консольной рамой (200) определяется согласно разности между фактическим положением (y) и заданным целевым положением (r),
при этом, когда лазерный луч, испущенный лазерным указателем (110), излучается в заданное целевое положение (r) на позиционно-чувствительном устройстве (210), позиционная погрешность (e) между первой консольной рамой (100) и второй консольной рамой (200) считается равной нулю.
3. Конфигурация гентри для составной мобильной системы лучевого контроля по п. 2,
в которой источник излучения установлен на одной из первой консольной рамы (100) и второй консольной рамы (200) и выполнен с возможностью испускания луча на инспектируемый объект, проходящий через канал сканирования, и
детектор излучения установлен на другой из первой консольной рамы (100) и второй консольной рамы (200) и выполнен с возможностью приема луча, испущенного источником излучения.
4. Конфигурация гентри для составной мобильной системы лучевого контроля по п. 3,
в которой на первой консольной раме (100) или второй консольной раме (200) предусмотрен контроллер (211).
5. Конфигурация гентри для составной мобильной системы лучевого контроля по п. 4,
в которой контроллер (211) рассчитывает целевую скорость (u') вращения электрического двигателя для приведения первой или второй консольной рамы (100, 200) в движение на основе позиционной погрешности (e), обнаруженной устройством (110, 210) измерения,
при этом контроллер (211) управляет электрическим двигателем, чтобы привести во вращение с рассчитанной целевой скоростью (u') вращения, так чтобы свести позиционную погрешность (e) между первой консольной рамой (100) и второй консольной рамой (200) к нулю.
6. Конфигурация гентри для составной мобильной системы лучевого контроля по п. 5,
в которой контроллер (211) рассчитывает целевую скорость (u') вращения электрического двигателя на основе позиционной погрешности (e) посредством PID-алгоритма.
7. Конфигурация гентри для составной мобильной системы лучевого контроля по п. 6,
в которой на первой консольной раме (100) или второй консольной раме (200) предусмотрен преобразователь (212) частоты, предназначенный для управления скоростью вращения электрического двигателя,
при этом целевая скорость (u') вращения используется в качестве командного значения для преобразователя (212) частоты для управления электрическим двигателем.
8. Конфигурация гентри для составной мобильной системы лучевого контроля по п. 7,
в которой на первой консольной раме (100) или второй консольной раме (200) предусмотрен кодер (213), предназначенный для распознавания фактической скорости (u) вращения электрического двигателя,
при этом контроллер (211) управляет скоростью вращения электрического двигателя на основе разности (e') скоростей вращения между целевой скоростью (u') вращения и фактической скоростью (u) вращения, распознанной кодером (213), так что скорость вращения электрического двигателя регулируется, чтобы стать равной целевой скорости (u') вращения.
9. Конфигурация гентри для составной мобильной системы лучевого контроля по п. 8,
в которой контроллер (211) управляет скоростью вращения электрического двигателя на основе разности (e') скоростей вращения посредством PID-алгоритма.
10. Конфигурация гентри для составной мобильной системы лучевого контроля по п. 1,
в которой контроллер выполнен в виде программируемого логического контроллера.
11. Конфигурация гентри для составной мобильной системы лучевого контроля по п. 3,
в которой консольная рама (200), на которой установлен детектор излучения, содержит свинец для защиты от излучения.
12. Конфигурация гентри для составной мобильной системы лучевого контроля по п. 1,
в которой первая, вторая и третья консольные рамы (100, 200, 300) разъемно собраны между собой.
13. Конфигурация гентри для составной мобильной системы лучевого контроля по п. 1,
в которой первая и вторая консольные рамы (100, 200) продолжаются в вертикальном направлении, а третья консольная рама (300) продолжается в горизонтальном направлении.
| УСТРОЙСТВО ДЛЯ ОСМОТРА КОНТЕЙНЕРОВ | 2001 |
|
RU2251683C2 |
| МОБИЛЬНАЯ КОНСОЛЬНАЯ СИСТЕМА ДВЕРНОГО ТИПА ДЛЯ ДОСМОТРА ГРУЗОВИКОВ-КОНТЕЙНЕРОВОЗОВ | 2007 |
|
RU2381490C2 |
| МОБИЛЬНАЯ СИСТЕМА ОСМОТРА ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 2007 |
|
RU2378641C2 |
| US 5692028A, 25.11.1997 | |||
| US 7497618B2, 03.03.2009 | |||
| US 2004125914A1, 01.07.2004. | |||

