Перекрестная ссылка на родственную заявку
Данная заявка испрашивает приоритет патентной заявки Китая No.201210231130.7, зарегистрированной 4 июля 2012 г. в Государственном ведомстве по интеллектуальной собственности Китая, полное содержание которой включено в настоящее описание путем ссылки.
Область техники, к которой относится изобретение
Настоящее изобретение относится к области техники лучевого контроля, конкретнее, относится к самоходной системе лучевого контроля.
Уровень техники
На предшествующем уровне техники система контроля перевозочных контейнеров/транспортных средств представляет собой крупногабаритную систему контроля контейнеров/транспортных средств, способную проводить идентификацию органических/неорганических веществ, быстрое сканирование и мониторинг радиоактивности. Основополагающей технологией функционирования системы контроля перевозочных контейнеров/транспортных средств является технология лучевой визуализации. Источник излучения и раздвижная детекторная консоль установлены на серийном шасси транспортного средства. В процессе инспектирования детекторная консоль выдвинута для образования канала сканирования, при этом инспектируемое транспортное средство непосредственно заходит в канал сканирования и проходит через канал сканирования. В ходе инспектирования излучение, испускаемое источником излучения, установленным на серийном транспортном средстве, проходит сквозь инспектируемое транспортное средство, при этом детекторная консоль принимает излучение для формирования сканируемого изображения. Вследствие необходимости в защите от излучения в детекторную консоль требуется ввести соответствующее количество свинца. Такое решение создает проблему в том, что детекторная консоль имеет большую массу, существенно увеличивая массу, необходимую для управления детекторной консолью. Чтобы обеспечить состояние равновесия серийного шасси транспортного средства, на котором установлена детекторная консоль, на серийном шасси транспортного средства необходимо создать балансировочный противовес. Это увеличивает массу и стоимость всей системы контроля и уменьшает маневренность всей системы контроля. В результате система контроля перевозочных контейнеров/транспортных средств лишена возможности быстрого перемещения. В этой связи необходимо усовершенствовать систему контроля перевозочных контейнеров/транспортных средств предшествующего уровня техники.
Раскрытие изобретения
Настоящее изобретение призвано устранить или частично устранить вышеупомянутые недостатки, по меньшей мере, в одном аспекте.
Согласно одному аспекту настоящего изобретения, предложена самоходная система лучевого контроля, содержащая: мобильную платформу; детекторную консоль, перевозимую на мобильной платформе, канал сканирования, образованный между детекторной консолью и мобильной платформой; источник излучения, установленный на мобильной платформе и выполненный с возможностью испускания излучения на инспектируемый объект, проходящий через канал сканирования; а также детектор, установленный на детекторной консоли и выполненный с возможностью приема излучения, испускаемого источником излучения. Самоходная система лучевого контроля дополнительно содержит механизм сопровождения, отделенный от детекторной консоли, при этом механизм сопровождения содержит материал для защиты от излучения, при этом механизм сопровождения сопровождает детекторную консоль, чтобы перемещаться бесконтактно в процессе проверки инспектируемого объекта с целью не допустить утечки излучения.
Согласно предпочтительному варианту осуществления настоящего изобретения, свинец для защиты от излучения введен в механизм сопровождения, при этом в детекторную консоль свинец для защиты от излучения не введен.
Согласно другому предпочтительному варианту осуществления настоящего изобретения, механизм сопровождения имеет приемное углубление, при этом часть детекторной консоли, на которой установлен детектор, помещена в приемное углубление механизма сопровождения в процессе проверки инспектируемого объекта.
Согласно другому предпочтительному варианту осуществления настоящего изобретения, существует заданное расстояние разнесения между механизмом сопровождения и детекторной консолью в процессе проверки инспектируемого объекта.
Согласно другому предпочтительному варианту осуществления настоящего изобретения, на механизме сопровождения предусмотрен, по меньшей мере, один датчик для определения фактического расстояния разнесения между механизмом сопровождения и детекторной консолью.
Согласно другому предпочтительному варианту осуществления настоящего изобретения, на механизме сопровождения предусмотрен контроллер, при этом контроллер рассчитывает целевую скорость вращения электрического двигателя для управления механизмом сопровождения на основе разности расстояний между заданным расстоянием разнесения и фактическим расстоянием разнесения, измеренным датчиком, а также управляет электрическим двигателем с использованием рассчитанной целевой скорости вращения, так чтобы поддерживать расстояние между механизмом сопровождения и детекторной консолью равным заданному расстоянию разнесения.
Согласно другому предпочтительному варианту осуществления настоящего изобретения, контроллер рассчитывает целевую скорость вращения электрического двигателя на основе разности расстояний посредством PID-алгоритма.
Согласно другому предпочтительному варианту осуществления настоящего изобретения, на механизме сопровождения предусмотрен преобразователь частоты, предназначенный для управления скоростью вращения электрического двигателя, при этом целевая скорость вращения используется в качестве командного значения для управления электрическим двигателем с помощью преобразователя частоты.
Согласно другому предпочтительному варианту осуществления настоящего изобретения, на механизме сопровождения предусмотрен кодер, предназначенный для распознавания фактической скорости вращения электрического двигателя, при этом контроллер управляет скоростью вращения электрического двигателя на основе разности скоростей вращения между целевой скоростью вращения и фактической скоростью вращения, распознанной кодером, так что скорость вращения электрического двигателя регулируется, чтобы стать равной целевой скорости вращения.
Согласно другому предпочтительному варианту осуществления настоящего изобретения, контроллер управляет скоростью вращения электрического двигателя на основе разности скоростей вращения посредством PID-алгоритма.
Согласно другому предпочтительному варианту осуществления настоящего изобретения, контроллер выполнен в виде программируемого логического контроллера.
Согласно другому предпочтительному варианту осуществления настоящего изобретения, механизм сопровождения содержит первый датчик и второй датчик, при этом первый датчик и второй датчик расположены соответственно с двух сторон детекторной консоли в процессе проверки инспектируемого объекта.
Согласно другому предпочтительному варианту осуществления настоящего изобретения, датчик выполнен в виде бесконтактного переключателя.
Согласно другому предпочтительному варианту осуществления настоящего изобретения, механизм сопровождения содержит пару участков квадратных столбчатых боковых стенок, обращенных друг к другу, а также участок пластинообразной заглубленной стенки, расположенный между парой участков боковых стенок.
Согласно другому предпочтительному варианту осуществления настоящего изобретения, мобильная мобильную платформа не оборудована противовесом для компенсации веса детекторной консоли.
Согласно другому предпочтительному варианту осуществления настоящего изобретения, детекторная консоль содержит горизонтальную первую консоль, соединенную с мобильной платформой, а также вертикальную вторую консоль, на которой установлен детектор, соединенную с горизонтальной первой консолью.
Согласно другому предпочтительному варианту осуществления настоящего изобретения, детекторная консоль выполнена в виде раздвижной детекторной консоли, при этом, когда не требуется проводить проверку инспектируемого объекта, раздвижная детекторная консоль сложена на мобильной платформе, чтобы способствовать транспортировке, а когда требуется проверить инспектируемый объект, раздвижная детекторная консоль выдвинута для образования канала сканирования.
Согласно другому предпочтительному варианту осуществления настоящего изобретения, механизм сопровождения выполнен с возможностью переноса на мобильной платформе и транспортировки вместе с ней, когда не требуется проводить проверку инспектируемого объекта.
Согласно другому предпочтительному варианту осуществления настоящего изобретения, механизм сопровождения и мобильная платформа выполнены в виде соответственно механизма сопровождения рельсового типа и мобильной платформы рельсового типа, которые могут перемещаться по рельсам параллельно друг другу.
Согласно другому предпочтительному варианту осуществления настоящего изобретения, механизм сопровождения и мобильная платформа выполнены в виде соответственно механизма сопровождения нерельсового типа и мобильной платформы нерельсового типа, которые могут перемещаться только с помощью колес.
По сравнению с предшествующим уровнем техники настоящее изобретение предпочтительно, по меньшей мере, в том, что, поскольку создан независимый механизм сопровождения, отделенный от детекторной консоли и выполняющий функцию защиты от излучения, нет необходимости во введении материала для защиты от излучения, обладающего высокой плотностью, такого как свинец, в детекторную консоль. Таким образом, вес детекторной консоли может быть эффективно снижен, при этом на мобильной платформе, являющейся носителем детекторной консоли, никакого балансировочного противовеса создавать не требуется, что позволяет эффективно решить проблему избыточной массы самоходной системы лучевого контроля, а также создать эффективную защиту от излучения, чтобы обеспечить безопасность. При этом в настоящем изобретении процесс движения механизма сопровождения тщательно контролируется, чтобы не допустить столкновения между механизмом сопровождения и детекторной консолью.
Краткое описание чертежей
На Фиг. 1a показан пояснительный вид в перспективе самоходной системы лучевого контроля согласно одному варианту осуществления настоящего изобретения;
на Фиг. 1b показан вид сверху самоходной системы лучевого контроля, представленной на Фиг. 1a, на котором показан механизм сопровождения, бесконтактно сопровождающий детекторную консоль;
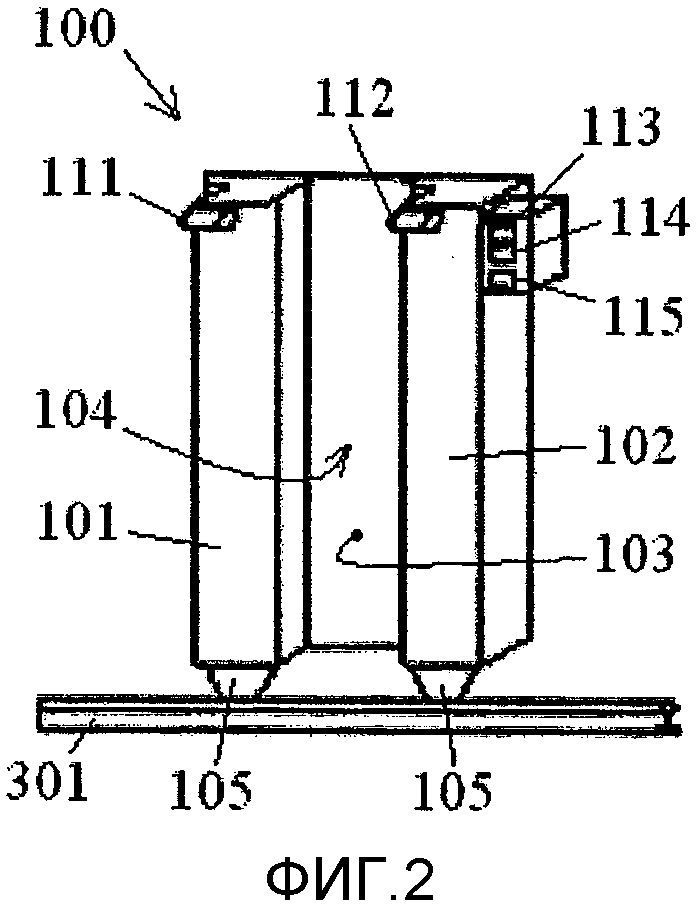
на Фиг. 2 показан пояснительный вид в перспективе механизма сопровождения, представленного на Фиг. 1;
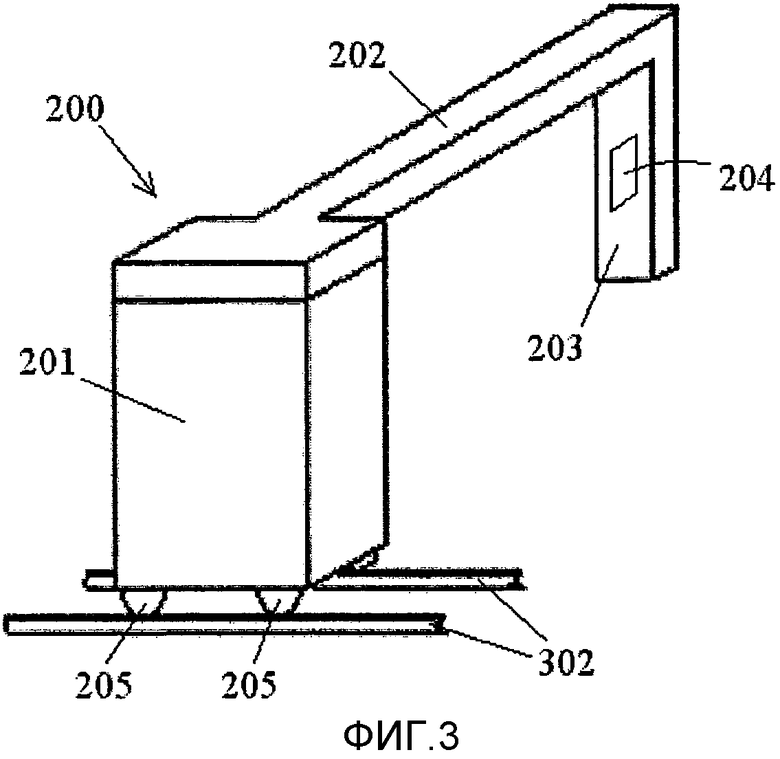
на Фиг. 3 показан пояснительный вид в перспективе мобильной платформы, имеющей детекторную консоль, представленную на Фиг. 1;
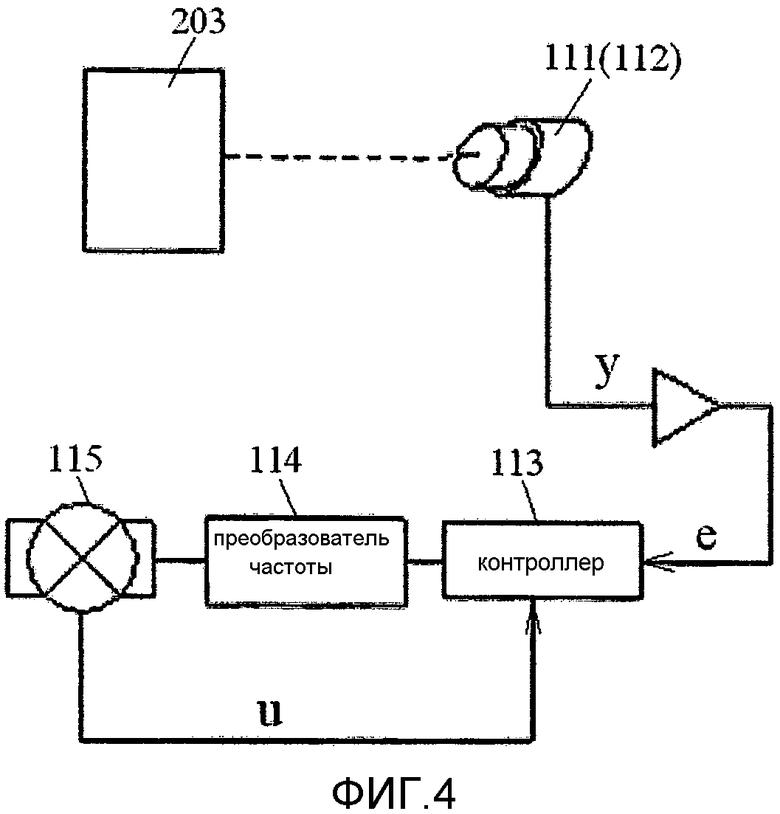
на Фиг. 4 показан способ управления самоходной системой лучевого контроля, представленной на Фиг. 1;
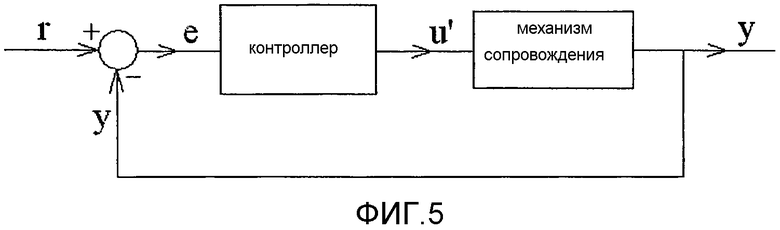
на Фиг. 5 показана блок-схема управления расстоянием между механизмом сопровождения и детекторной консолью в самоходной системе лучевого контроля, представленной на Фиг. 1;
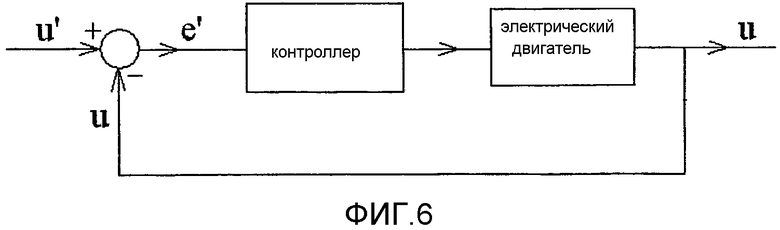
на Фиг. 6 показана блок-схема управления скоростью вращения приводного электрического двигателя для механизма сопровождения в самоходной системе лучевого контроля, представленной на Фиг. 1.
Осуществление изобретения
Примеры осуществления по настоящему раскрытию будут подробно описаны ниже со ссылкой на прилагаемые чертежи, на которых одинаковые ссылочные позиции относятся к одинаковым элементам. Настоящее раскрытие, однако, предполагает различные формы осуществления и не должно рассматриваться как ограниченное вариантами осуществления, изложенными в настоящем описании; эти варианты осуществления служат тому, чтобы настоящее раскрытие было всесторонним и полным, а также в полной мере передало идею изобретения специалистам в данной области техники.
На Фиг. 1a показан пояснительный вид в перспективе самоходной системы лучевого контроля согласно одному варианту осуществления настоящего изобретения. На Фиг. 1b показан вид сверху самоходной системы лучевого контроля, представленной на Фиг. 1a, на котором показан механизм сопровождения, бесконтактно сопровождающий детекторную консоль. На Фиг. 2 показан пояснительный вид в перспективе механизма сопровождения, представленного на Фиг. 1a и 1b. На Фиг. 3 показан пояснительный вид в перспективе мобильной платформы, имеющей детекторную консоль, представленную на Фиг. 1a и 1b.
Как показано на Фиг. 1a, 1b, 2 и 3, в одном варианте осуществления настоящего изобретения самоходная система лучевого контроля главным образом содержит транспортное средство 200 для проведения контроля, а также механизм 100 сопровождения, отделенный от транспортного средства 200 для проведения контроля.
Как показано на Фиг. 3, транспортное средство 200 для проведения контроля главным образом содержит мобильную платформу 201, а также детекторную консоль 202, 203, перевозимую на мобильной платформе 201.
Как показано на Фиг. 1a, 1b и 3, между детекторной консолью 202, 203 и мобильной платформой 201 образован канал сканирования, предназначенный для прохода через него инспектируемого объекта (не показан, например, контейнер или транспортное средство).
Как показано на Фиг. 1a и 1b, источник 206 излучения установлен на мобильной платформе 201 и выполнен с возможностью испускания излучения на инспектируемый объект, проходящий через канал сканирования.
Как показано на Фиг. 1a, 1b и 3, детектор 204, соответствующий источнику излучения, установлен на детекторной консоли и выполнен с возможностью приема излучения, испускаемого источником излучения и проходящего сквозь инспектируемый объект.
В представленном варианте осуществления детекторная консоль 202, 203 главным образом содержит горизонтальную первую консоль 202, а также вертикальную вторую консоль 203. Как показано на Фиг. 1a, 1b и 3, горизонтальная первая консоль 202 соединена с мобильной платформой 201, а вертикальная вторая консоль 203 соединена с горизонтальной первой консолью 202. Детектор 204 установлен на вертикальной второй консоли 203.
Хотя и не показано, в одном варианте осуществления настоящего изобретения горизонтальная первая консоль 202 может обладать возможностью поворота в одном или более направлениях относительно мобильной платформы 201. Кроме того, вертикальная вторая консоль 203 может обладать возможностью поворота в одном или более направлениях относительно горизонтальной первой консоли 202. Таким образом, первая и вторая детекторные консоли 202, 203 образуют раздвижную и складывающуюся детекторную консоль. Когда не требуется проводить проверку инспектируемого объекта, первая и вторая детекторные консоли 202, 203 сложены на мобильной платформе 201 для транспортировки. Когда требуется проверить инспектируемый объект, первая и вторая детекторные консоли 202, 203 выдвинуты для образования канала сканирования.
Как показано на Фиг. 1a, 1b и 2, самоходная система лучевого контроля дополнительно содержит механизм 100 сопровождения, отделенный от детекторной консоли 202, 203. Механизм 100 сопровождения содержит пару участков 101, 102 квадратных столбчатых боковых стенок, обращенных друг к другу, а также участок 103 пластинообразной заглубленной стенки, расположенный между парой участков 101, 102 боковых стенок. Пара участков 101, 102 боковых стенок и участок 103 пластинообразной заглубленной стенки вместе образуют приемное углубление 104. Вторая детекторная консоль 203 помещена в приемное углубление 104.
Следует отметить, что механическая конструкция механизма 100 сопровождения не ограничена представленными вариантами осуществления, при этом механизм сопровождения может иметь другие конструкции, если механизм сопровождения имеет приемное углубление 104, выполненное с возможностью приема в него второй детекторной консоли 203.
В настоящем изобретении механизм 100 сопровождения содержит материал для защиты от излучения, например свинец. В предпочтительном варианте осуществления настоящего изобретения свинец для защиты от излучения введен в механизм 100 сопровождения.
Как показано на Фиг. 1a и 1b, в процессе проверки инспектируемого объекта вторая детекторная консоль 203 детекторной консоли 202, 203, на которой установлен детектор 204, помещена в приемное углубление 104 механизма сопровождения 100, чтобы не допустить утечки излучения.
Поскольку детектор 204 установлен на второй детекторной консоли 203, луч, испущенный источником излучения, подвергнет облучению вторую детекторную консоль 203. В настоящем изобретении вторая детекторная консоль 203 помещена в приемное углубление 104, выполняющее функцию защиты от излучения. Таким образом можно не допустить утечки излучения, направленного на вторую детекторную консоль 203, и тем самым добиться хорошей защиты от излучения и защитить окружающую среду и оператора от воздействия лучей.
При этом, поскольку механизм 100 сопровождения является независимым механизмом, отделенным от детекторной консоли 203, нет необходимости во введении материала для защиты от излучения, имеющего высокую плотность, в детекторную консоль 203, так что вес детекторной консоли 203 можно существенно снизить. Таким образом, нет необходимости в создании балансировочного противовеса на мобильной платформе 201, на которой перевозится детекторная консоль 203, что позволяет эффективно решить проблему избыточной массы самоходной системы лучевого контроля, а также создать эффективную защиту от излучения, чтобы обеспечить безопасность.
Как показано на Фиг. 1a и 1b, в процессе проверки инспектируемого объекта механизм 100 сопровождения сопровождает детекторные консоли 202, 203.
В предпочтительном варианте осуществления настоящего изобретения, чтобы не допустить соударение механизма 100 сопровождения с детекторными консолями 202, 203 в процессе проверки инспектируемого объекта, механизм 100 сопровождения выполнен с возможностью сопровождения детекторных консолей 202, 203 бесконтактным способом в течение всего времени в ходе проверки инспектируемого объекта.
На Фиг. 4 показан способ управления самоходной системой лучевого контроля, представленной на Фиг. 1a и 1b.
Как показано на Фиг. 1a, 1b, 2 и 4, с целью управления механизмом 100 сопровождения, описанным выше, на механизме 100 сопровождения предусмотрен, по меньшей мере, один датчик 111, 112. Этот, по меньшей мере, один датчик 111, 112 используется для измерения фактического расстояния y разнесения между механизмом 100 сопровождения и детекторными консолями 202, 203.
В предпочтительном варианте осуществления настоящего изобретения на механизме 100 сопровождения предусмотрена пара датчиков 111, 112, содержащая первый датчик 111 и второй датчик 112. Как показано на Фиг. 1a и 1b, первый датчик 111 и второй датчик 112 расположены соответственно с двух сторон детекторной консоли 202, 203 в процессе проверки инспектируемого объекта.
Однако следует отметить, что настоящее изобретение не ограничено представленными вариантами осуществления и механизм 100 сопровождения может быть оборудован только одним датчиком. Целью создания множества датчиков является повышение надежности системы, например, если один из датчиков вышел из строя, другой датчик может нормально работать. Таким образом можно надежно предотвратить соударение механизма сопровождения с детекторными консолями 202, 203.
На Фиг. 5 показана блок-схема управления расстоянием между механизмом сопровождения и детекторной консолью в самоходной системе лучевого контроля, представленной на Фиг. 1a и 1b.
Как показано на Фиг. 4 и 5, в предпочтительном варианте осуществления настоящего изобретения в процессе проверки инспектируемого объекта механизм 100 сопровождения выполнен с возможностью поддержания заданного расстояния r разнесения от детекторных консолей 202, 203 постоянным.
Как показано на Фиг. 1a, 1b, 2 и 4, на механизме 100 сопровождения предусмотрен контроллер 113, при этом контроллер 113 рассчитывает целевую скорость u′ вращения электрического двигателя для управления механизмом 100 сопровождения на основе разности e расстояний между заданным расстоянием r разнесения и фактическим расстоянием y разнесения, измеренным датчиками 111, 112, и управляет электрическим двигателем с использованием рассчитанной целевой скорости u′ вращения, так чтобы поддерживать расстояние между механизмом 100 сопровождения и детекторной консолью 202, 203 равным заданному расстоянию r разнесения.
В предпочтительном варианте осуществления настоящего изобретения контроллер 113 рассчитывает целевую скорость u′ вращения электрического двигателя на основе разности e расстояний посредством PID (Пропорционально-Интегрально-Дифференциальное регулирование) алгоритма. Однако настоящее изобретение этим не ограничивается и в контроллере 113 могут использоваться любые другие пригодные алгоритмы управления для регулирования расстояния разнесения между механизмом 100 сопровождения и детекторными консолями 202, 203.
Поскольку PID-алгоритм является стандартным алгоритмом управления, для краткости изложения его подробное описание опущено.
Как показано на Фиг. 1a, 1b, 2 и 4, на механизме 100 сопровождения предусмотрен преобразователь 114 частоты, предназначенный для управления скоростью вращения электрического двигателя. Целевая скорость u′ вращения, выдаваемая контроллером 113, используется в качестве командного значения для преобразователя 114 частоты, управляющего электрическим двигателем.
На Фиг. 6 показана блок-схема управления скоростью вращения приводного электрического двигателя механизма сопровождения в самоходной системе лучевого контроля, представленной на Фиг. 1a и 1b.
С целью управления скоростью вращения электрического двигателя для управления механизмом 100 сопровождения, чтобы достичь целевой скорости u′ вращения, как показано на Фиг. 1a, 2 и 4, на механизме 100 сопровождения предусмотрен кодер 115, предназначенный для распознавания фактической скорости u вращения электрического двигателя.
Как показано на Фиг. 6, в предпочтительном варианте осуществления настоящего изобретения контроллер 113 управляет скоростью вращения электрического двигателя на основе разности e′ скоростей вращения между целевой скоростью u′ вращения и фактической скоростью u вращения, распознанной кодером 115, так что скорость вращения электрического двигателя регулируется, чтобы стать равной целевой скорости u′ вращения.
В предпочтительном варианте осуществления настоящего изобретения контроллер 113 управляет скоростью вращения электрического двигателя на основе разности e′ скоростей вращения посредством PID-алгоритма.
В одном варианте осуществления настоящего изобретения контроллер может представлять собой программируемый логический контроллер, микрокомпьютер на одной микросхеме или персональный компьютер.
В одном варианте осуществления настоящего изобретения датчик 111, 112 выполнен в виде бесконтактного переключателя. Разумеется, датчик может представлять собой любой другой пригодный датчик расстояния, например акустический датчик расстояния, оптический датчик расстояния, контактный датчик расстояния и т.д.
Как показано на Фиг. 1a, 1b, 2 и 3, механизм 100 сопровождения и мобильная платформа 201 могут быть выполнены в виде соответственно механизма сопровождения рельсового типа и мобильной платформы рельсового типа, перемещающихся по рельсам 301, 302 параллельно друг другу посредством колес 105, 205.
Однако настоящее изобретение этим не ограничивается, при этом механизм 100 сопровождения и мобильная платформа 201 могут быть выполнены в виде соответственно механизма сопровождения нерельсового типа и мобильной платформы нерельсового типа, перемещающихся по заданным параллельным траекториям с помощью колес 105, 205.
В настоящем изобретении, когда не требуется проводить проверку инспектируемого объекта, механизм 100 сопровождения переносится на мобильной платформе 201 и транспортируется вместе с мобильной платформой 201.
Хотя показан и описан ряд примеров осуществления, специалистам в данной области техники будет понятно, что в этих вариантах осуществления могут быть выполнены различные изменения и модификации в пределах объема изобретения, при этом сам же объем определяется формулой изобретения и ее эквивалентами.
Использование: для контроля объекта посредством проникающего излучения. Сущность изобретения заключается в том, что самоходная система лучевого контроля содержит мобильную платформу, детекторную консоль, перевозимую на мобильной платформе, и канал сканирования, образованный между детекторной консолью и мобильной платформой, источник излучения, установленный на мобильной платформе и выполненный с возможностью испускания излучения на инспектируемый объект, проходящий через канал сканирования, и детектор, установленный на детекторной консоли и выполненный с возможностью приема излучения, испускаемого источником излучения, при этом самоходная система лучевого контроля дополнительно содержит механизм сопровождения, отделенный от детекторной консоли, при этом механизм сопровождения содержит материал для защиты от излучения, при этом механизм сопровождения сопровождает детекторную консоль, чтобы перемещаться бесконтактно в процессе проверки инспектируемого объекта для недопущения утечки излучения. Технический результат: снижение массы самоходной системы лучевого контроля, а также обеспечение возможности эффективной защиты от излучения. 19 з.п. ф-лы, 6 ил.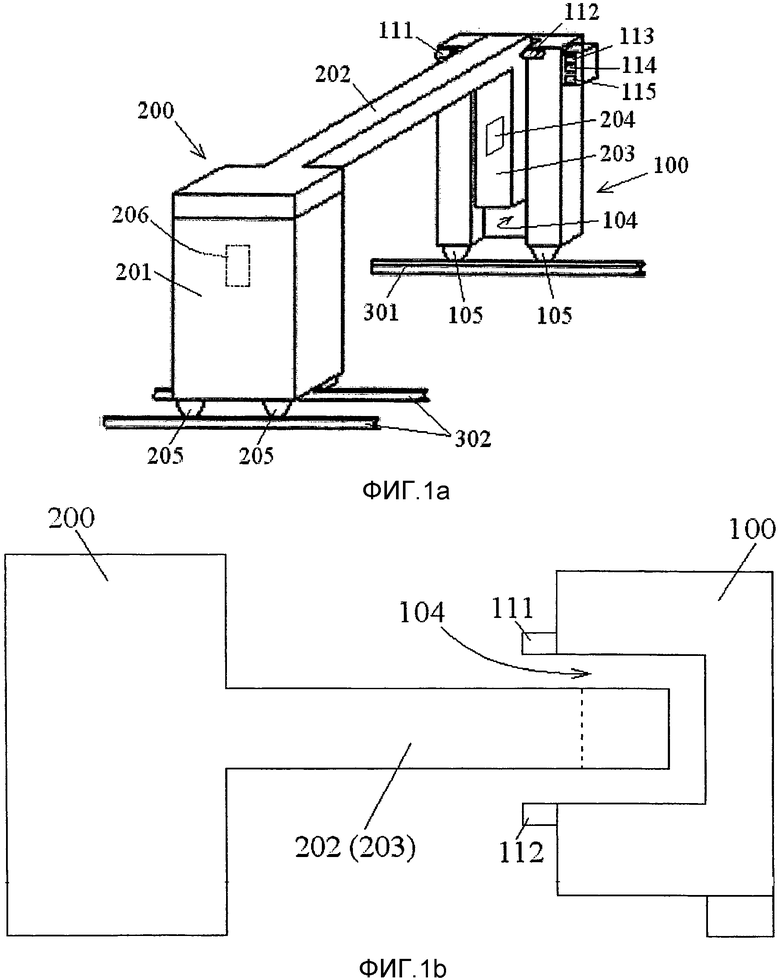
1. Самоходная система лучевого контроля, содержащая:
мобильную платформу (201);
детекторную консоль (202, 203), перевозимую на мобильной платформе (201), и канал сканирования, образованный между детекторной консолью (202, 203) и мобильной платформой (201);
источник (206) излучения, установленный на мобильной платформе (201) и выполненный с возможностью испускания излучения на инспектируемый объект, проходящий через канал сканирования; и
детектор (204), установленный на детекторной консоли (202, 203) и выполненный с возможностью приема излучения, испускаемого источником (206) излучения,
при этом самоходная система лучевого контроля дополнительно содержит механизм (100) сопровождения, отделенный от детекторной консоли (202, 203),
при этом механизм (100) сопровождения содержит материал для защиты от излучения, при этом механизм (100) сопровождения сопровождает детекторную консоль (202, 203), чтобы перемещаться бесконтактно в процессе проверки инспектируемого объекта для недопущения утечки излучения.
2. Самоходная система лучевого контроля по п. 1,
в которой свинец для защиты от излучения введен в механизм (100) сопровождения, а в детекторную консоль (202, 203) свинец для защиты от излучения не введен.
3. Самоходная система лучевого контроля по п. 1,
в которой механизм (100) сопровождения имеет приемное углубление (104), при этом часть (203) детекторной консоли (202, 203), на которой установлен детектор (204), помещена в приемное углубление (104) механизма (100) сопровождения в процессе проверки инспектируемого объекта.
4. Самоходная система лучевого контроля по п. 3,
в которой существует заданное расстояние (r) разнесения между механизмом (100) сопровождения и детекторной консолью (202, 203) в процессе проверки инспектируемого объекта.
5. Самоходная система лучевого контроля по п. 4,
в которой на механизме (100) сопровождения предусмотрен, по меньшей мере, один датчик (111, 112) для измерения фактического расстояния (y) разнесения между механизмом (100) сопровождения и детекторной консолью (202, 203).
6. Самоходная система лучевого контроля по п. 5,
в которой на механизме (100) сопровождения предусмотрен контроллер (113), при этом контроллер (113) выполнен с возможностью расчета целевой скорости (u΄) вращения электрического двигателя для управления механизмом (100) сопровождения на основе разности (e) расстояний между заданным расстоянием (r) разнесения и фактическим расстоянием (y) разнесения, измеренным датчиком (111, 112), и управления электрическим двигателем с использованием рассчитанной целевой скорости (u΄) вращения, чтобы поддерживать расстояние между механизмом (100) сопровождения и детекторной консолью (202, 203) равным заданному расстоянию (r) разнесения.
7. Самоходная система лучевого контроля по п. 6,
в которой контроллер (113) рассчитывает целевую скорость (u΄) вращения электрического двигателя на основе разности (e) расстояний посредством PID-алгоритма.
8. Самоходная система лучевого контроля по п. 7,
в которой на механизме (100) сопровождения предусмотрен преобразователь (114) частоты, предназначенный для управления скоростью вращения электрического двигателя,
при этом целевая скорость (u΄) вращения используется в качестве командного значения для преобразователя (114) частоты, управляющего электрическим двигателем.
9. Самоходная система лучевого контроля по п. 8,
в которой на механизме (100) сопровождения предусмотрен кодер (115), предназначенный для распознавания фактической скорости (u) вращения электрического двигателя,
при этом контроллер (113) управляет скоростью вращения электрического двигателя на основе разности (e΄) скоростей вращения между целевой скоростью (u΄) вращения и фактической скоростью (u) вращения, распознанной кодером (115), так что скорость вращения электрического двигателя регулируется, чтобы стать равной целевой скорости (u΄) вращения.
10. Самоходная система лучевого контроля по п. 9,
в которой контроллер (113) управляет скоростью вращения электрического двигателя на основе разности (e΄) скоростей вращения посредством PID-алгоритма.
11. Самоходная система лучевого контроля по п. 6,
в которой контроллер выполнен в виде программируемого логического контроллера.
12. Самоходная система лучевого контроля по п. 5,
в которой механизм (100) сопровождения содержит первый датчик (111) и второй датчик (112),
при этом первый датчик (111) и второй датчик (112) расположены соответственно с двух сторон детекторной консоли (202, 203) в процессе проверки инспектируемого объекта.
13. Самоходная система лучевого контроля по п. 12,
в которой датчик (111, 112) представляет собой бесконтактный переключатель.
14. Самоходная система лучевого контроля по п. 1,
в которой механизм (100) сопровождения содержит:
пару участков (101, 102) квадратных столбчатых боковых стенок, обращенных друг к другу; и
участок (103) пластинообразной заглубленной стенки, расположенный между парой участков (101, 102) боковых стенок.
15. Самоходная система лучевого контроля по п. 1,
в которой мобильная платформа (201) не оборудована противовесом для компенсации веса детекторной консоли (202, 203).
16. Самоходная система лучевого контроля по п. 1,
в которой детекторная консоль (202, 203) содержит:
горизонтальную первую консоль (202), соединенную с мобильной платформой (201); и
вертикальную вторую консоль (203), на которой установлен детектор (204), соединенную с горизонтальной первой консолью (202).
17. Самоходная система лучевого контроля по п. 1,
в которой детекторная консоль (202, 203) выполнена в виде раздвижной детекторной консоли,
при этом, когда не требуется проводить проверку инспектируемого объекта, раздвижная детекторная консоль (202, 203) сложена на мобильной платформе (201), чтобы облегчить транспортировку, и
при этом, когда требуется проверить инспектируемый объект, раздвижная детекторная консоль (202, 203) выдвинута для образования канала сканирования.
18. Самоходная система лучевого контроля по п. 1,
в которой механизм (100) сопровождения выполнен с возможностью переноса на мобильной платформе (201) и транспортировки вместе с ней, когда не требуется проводить проверку инспектируемого объекта.
19. Самоходная система лучевого контроля по п. 1,
в которой механизм (100) сопровождения и мобильная платформа (201) выполнены в виде соответственно механизма сопровождения рельсового типа и мобильной платформы рельсового типа, перемещающихся по рельсам (301, 302) параллельно друг другу.
20. Самоходная система лучевого контроля по п. 1,
в которой механизм (100) сопровождения и мобильная платформа (201) выполнены в виде соответственно механизма сопровождения нерельсового типа и мобильной платформы нерельсового типа, перемещающихся только с помощью колес (105, 205).
| УСТРОЙСТВО ДЛЯ ОСМОТРА КОНТЕЙНЕРОВ | 2001 |
|
RU2251683C2 |
| МОБИЛЬНАЯ КОНСОЛЬНАЯ СИСТЕМА ДВЕРНОГО ТИПА ДЛЯ ДОСМОТРА ГРУЗОВИКОВ-КОНТЕЙНЕРОВОЗОВ | 2007 |
|
RU2381490C2 |
| МОБИЛЬНАЯ СИСТЕМА ОСМОТРА ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 2007 |
|
RU2378641C2 |
| US 5692028A, 25.11.1997US 7497618B2, 03.03.2009 | |||
| US 2004125914A1, 01.07.2004. | |||

