Настоящая заявка относится, в общем случае, к наружной дистанционной лучевой терапии (EBRT). Она находит конкретное применение совместно с вычислением дозы на уровне отдельных сегментов пучка и отслеживание движения во времени для адаптивного планирования лечения при наружной дистанционной лучевой терапии и будет описана с конкретной ссылкой на него. Однако следует понимать, что она также находит применение в других сценариях использования и не обязана ограничиваться вышеупомянутым применением.
При осуществлении наружной дистанционной лучевой терапии (EBRT) пространственно нацеливаемые дозы излучения применяются к опухолям или другим мишеням, содержащим раковую или злокачественную ткань. Растущие и быстро размножающиеся раковые клетки в большей степени подвержены повреждению излучением, по сравнению с нормальными клетками, так что дозы, вводимые с надлежащим планированием, предпочтительно, убивают раковую или злокачественную ткань. Традиционно, EBRT состоит из трех стадий: моделирования (формирования изображения), планирования и введения, в указанном порядке. Планирование лечения обычно осуществляется с использованием заранее полученных изображений компьютерной томографии (КТ). Введение излучения делится на одну или более фракций, вводимых на ежедневной основе. Поскольку стадии формирования изображения, планирования и введения осуществляются в разные дни, анатомия пациента в ходе введения излучения может отличаться от анатомии в ходе формирования изображения. Это обусловлено различными причинами, например, потерей веса, движением органов, усыханием опухоли и т.д. Кроме того, модели дыхания, физиологические изменения, и случайное перемещение пациента в ходе введения излучения также может изменять анатомию пациента относительно пучка излучения.
Чтобы адаптировать первоначальные планы лечения и/или делать выводы об успешности плана введения, клиники начали использовать механизмы обратной связи (на основе изображений и на основе слежения) в ходе лечения. Механизмы обратной связи позволяют связать геометрические изменения в анатомии пациента с 3D распределением дозы, полученной пациентом. Процедуры обратной связи на основе изображений (например, КТ коническим пучком (CBCT), MVCT, ультразвуковое исследование посредством таргетирования сбора данных в B-режиме (BAT) и пр.) используются между фракциями и связаны с КТ-моделированием с использованием алгоритмов деформируемой регистрации. Способы на основе слежения (например, оптического отслеживания, электромагнитного отслеживания и тому подобное) также используются в ходе введения излучения для получения внутрифракционной информации движения.
Существующие способы оценивания/накопления дозы (например, свертка дозы с движением) предполагают стационарное (не зависящее от времени) распределение запланированной дозы. Другими словами, когда пространственное положение мишени связано с сеткой запланированной дозы, предполагается, что доза из всех углов гентри и отдельных сегментов пучка вводятся одновременно. Это предположение позволяет использовать накопленную дозу из всех пучков (углов гентри) и сегментов пучка в алгоритмах свертки дозы. Это предположение справедливо в дозиметрическом смысле для стационарных и анатомически неизменных мишеней, которые, однако, встречаются довольно редко. Дополнительно, план лечения указывает конечное количество углов гентри (пучков), и каждый пучок имеет конечное количество сегментов или точек управления. Эти углы гентри и сегменты достигаются последовательно.
Настоящая заявка описывает алгоритм проверки дозы, который позволяет коррелировать положение мишени и/или окружающей нормальной ткани с фактической дозой, вводимой в этот момент, без предположения о дозиметрической независимости от времени в протоколе оценивания дозы. Таким образом, точность введенной дозы повышается, поскольку движение органов в ходе введения непосредственно коррелирует с динамической вводимой дозой, а не со статической запланированной дозой.
Настоящая заявка обеспечивает новые и усовершенствованные способы и системы, которые позволяют преодолеть вышеупомянутые и другие проблемы.
В соответствии с одним аспектом предусмотрена система планирования лечения. Система, включающая в себя один или более процессоров, запрограммированных принимать план лучевой терапии (RTP) для облучения мишени на протяжении курса из одной или более лечебных фракций, причем упомянутый RTP включает в себя распределение запланированной дозы, подлежащей введению в мишень, принимать данные движения для, по меньшей мере, одной из лечебных фракций RTP, принимать временные метрические данные введения для, по меньшей мере, одной из лечебных фракций RTP, вычислять распределение дозы, скомпенсированной по движению, для мишени с использованием данных движения и временных метрических данных введения для регулировки распределения запланированной дозы на основании принятых данных движения и временных метрических данных введения, и сравнивать распределение дозы, скомпенсированной по движению, с распределением запланированной дозы.
В соответствии с другим аспектом, способ генерации лечения для конкретного пациента. Способ, включающий в себя прием плана лучевой терапии (RTP) для облучения мишени на протяжении курса из одной или более лечебных фракций, причем упомянутый RTP включает в себя распределение запланированной дозы для мишени и других областей, представляющих интерес (для каждого сегмента, пучка и целого), прием данных движения для, по меньшей мере, одной из лечебных фракций RTP, прием временных метрических данных введения для, по меньшей мере, одной из лечебных фракций RTP, вычисление распределения дозы, скомпенсированной по движению, для мишени с использованием данных движения и временных метрических данных введения для регулировки распределения запланированной дозы на основании принятых данных движения и временных метрических данных введения; и сравнение распределения дозы, скомпенсированной по движению, с распределением запланированной дозы.
Одно преимущество состоит в обеспечении усовершенствованном и более точном оценивании дозы.
Другое преимущество состоит в вычислении дозы излучения, фактически вводимой пациенту.
Другое преимущество состоит в более точном введении излучения в область мишени.
Другое преимущество состоит в более точном определении дозы излучения, фактически вводимой в мишень и нецелевую ткань.
Другое преимущество состоит в усовершенствовании планирования процессов лучевой терапии, используемых в медицинских учреждениях.
Другое преимущество состоит в снижении опасности повреждения нормальной ткани.
Специалисты в данной области техники могут понять дополнительные преимущества настоящего изобретения по ознакомлении с нижеследующим подробным описанием.
Изобретение может быть реализовано в различных компонентах и конфигурациях компонентов и в различных этапах и конфигурациях этапов. Чертежи приведены только в целях иллюстрации предпочтительных вариантов осуществления и не подлежат рассмотрению в качестве ограничения изобретения.
Фиг. 1 – система лучевой терапии в соответствии с аспектами настоящего раскрытия.
Фиг. 2 изображает картину введения дозы согласно аспектам настоящего раскрытия.
Фиг. 3 изображает способ генерации лечения для конкретного пациента согласно аспектам настоящего раскрытия.
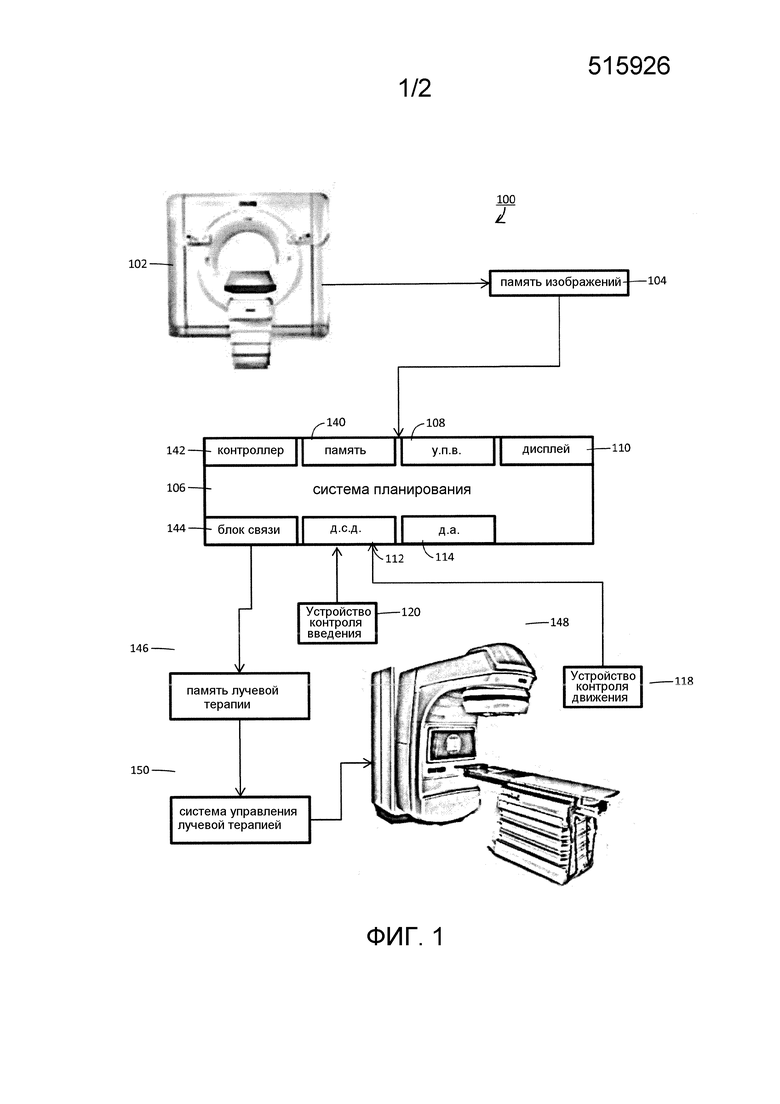
Фиг. 1 иллюстрирует систему 100 лучевой терапии для лечения пациентов, которая реализует процесс, который обеспечивает вычисление дозы на уровне отдельных сегментов пучка и отслеживание движения во времени для адаптивного планирования лечения. Обычно, планы лечения для наружной дистанционной лучевой терапии (EBRT) обычно являются ‘статическими’, т.е. они, в общем случае, разрабатываются на основании единичного сканирования компьютерной томографии (КТ). Однако внутренняя анатомия пациента может демонстрировать измененное движение в ходе введения излучения, которое, если его не учитывать, может приводить к значительным дозиметрическим ошибкам. Кроме того, план лечения описывает многолучевое распределение дозы, которое не изменяется со временем. Однако введение излучения является последовательным, причем каждый отдельный пучок излучения вводится только в течение конкретного времени. Каждый пучок также состоит из одного или более сегментов, каждый из которых облучает конкретную область мишени. Описанный ниже процесс повышает точность оценивания влияния движения на дозу на основании отслеживания с высокой временной частотой информации о движении мишени и состоянии введения аппарата. Доза, вычисленная из каждого отдельного сегмента каждого пучка, коррелирует с отслеживаемым положением мишени, для оценивания дозы, фактически полученной мишенью и/или окружающей нормальной тканью. Эту информацию можно использовать в процессах адаптивного планирования/автопланирования лечения.
Согласно Фиг. 1, система лучевой терапии применяется для обеспечения пациенту лучевой терапии, например, одного или более из наружной дистанционной лучевой терапии, протонной терапии, абляционной терапии и терапии высокоинтенсивным фокусированным ультразвуком. Система 100 лучевой терапии включает в себя одно или более устройств 102 формирования изображения, пригодных для получения изображений, выражающих объекты, представляющие интерес (OOI), например области, представляющие интерес (ROI) и точки, представляющие интерес (POI), в пациентах. Устройства 102 формирования изображения надлежащим образом включают в себя сканер компьютерной томографии (КТ). Однако устройства 102 формирования изображения могут, дополнительно или альтернативно, включать в себя один или более из сканера позитрон-эмиссионной томографии (ПЭТ), магнитно-резонансный (МР) сканер, сканер однофотонной эмиссионной компьютерной томографии (ОФЭКТ) и пр.
Изображения, полученные от устройств 102 формирования изображения, обычно являются трехмерными изображениями. Однако допустимы двухмерные изображения. Трехмерные изображения обычно включают в себя стопку двухмерных изображений, далее именуемых срезами. Дополнительно, изображения, полученные от устройств 102 формирования изображения, сохраняются в памяти 104 изображений. Обычно память 104 изображений является центральной системой хранения записей. Однако допустимо, чтобы память 104 изображений была локальна по отношению к устройствам 102 формирования изображения или другому компоненту системы 100 лучевой терапии. Постольку поскольку память 104 изображений является удаленной от устройств 102 формирования изображения, устройства 102 формирования изображения надлежащим образом соединены с нею сетью связи, например, локальной сетью (LAN).
Система 106 планирования системы 100 лучевой терапии принимает изображения планирования для каждого из пациентов и использует изображения для генерации и/или обновления планов лучевой терапии (RTP) и/или для осуществления послелечебный анализа RTP. Изображение планирования это изображение, используемое для генерации и/или обновления RTP. Обычно изображения получаются из памяти 104 изображений и/или устройств 102 формирования изображения. Однако изображения можно получать из других источников. Дополнительно, изображения планирования обычно принимаются электронными средствами через сеть связи. Однако допустимы другие средства приема изображений планирования. Надлежащим образом, система 106 планирования обеспечивает типичные функциональные возможности планирования лечения, например, инструменты ручного и автоматизированного сегментирования, инструменты объединения изображений, инструменты планирования трехмерной конформной лучевой терапии (КЛТ), инструменты оптимизации лучевой терапии с инверсной модуляцией интенсивности (ЛТМИ), инструменты вычисления дозы и т.д.
Для генерации RTP для пациента система 106 планирования принимает одно или более изображений планирования до осуществления лучевой терапии. Изображения планирования надлежащим образом фокусируются на одну или более опухолей или других мишеней пациента, подлежащих лечению или обследованию. Дополнительно, изображения планирования являются надлежащим образом трехмерными и включают в себя множество срезов (или двухмерных изображений).
После приема изображений планирования идентифицируется контур (или траектория) вокруг каждой из опухолей или других мишеней и одного или более органов, находящихся в опасности (OAR) или других областей. Оконтуривание используется для разграничения между опухолями или другими мишенями и OAR или другими областями и между OAR и другими областями. Оконтуривание надлежащим образом осуществляет онколог или другой клиницист. Однако допустимы подходы автоматизации и частичной автоматизации. Постольку поскольку клиницист осуществляет или утверждает оконтуривание, клиницист надлежащим образом использует одно или более устройств 108 пользовательского ввода для идентификации контуров на графическом пользовательском интерфейсе, представляемом посредством дисплея 110. Например, графический пользовательский интерфейс может отображать изображение планирования и давать возможность клиницисту рисовать или размечать контуры на изображении планирования с использованием устройств 108 пользовательского ввода.
Помимо идентификации контуров, для оконтуренных областей задаются параметры плана облучения. Надлежащим образом, клиницист или онколог задает параметры плана облучения посредством графического пользовательского интерфейса. Например, клиницист задает параметры плана облучения с использованием устройств 108 пользовательского ввода. Однако, как и в случае оконтуривания, допустимы подходы автоматизации. Параметры плана облучения обычно включают в себя минимальные или целевые дозы, подлежащие введению в опухоли или другие мишени, максимально допустимые дозы для OAR или других областей и пр.
Параметры плана лучевой терапии, совместно с известной информацией о характеристиках ослабления или поглощения излучения различных тканей и оконтуренных опухолей или других мишеней и оконтуренных OAR или других областей, используются для генерации RTP. Как рассмотрено ниже, RTP задает траектории, вдоль которых пучки излучения облучают мишени, пространственную проекцию пучка излучения траектории каждого пучка излучения, интенсивность пучка излучения вдоль каждой траектории, длительность облучения мишеней вдоль каждой траектории и т.п. В некоторых вариантах осуществления, RTP оптимизируется для конкретного типа лучевой терапии, например, наружной дистанционной лучевой терапии, протонной терапии, абляционной терапии и терапии высокоинтенсивным фокусированным ультразвуком.
В ходе каждого сеанса лучевой терапии определяется накопленная доза излучения, введенная в опухоли или другие мишени и OAR или другие области. По ходу сеанса терапии опухоли или другие мишени обычно усыхают и OAR или другие области обычно смещаются, что может приводить к ошибкам в вычислениях накопленной дозы и контурах (или траекториях). RTP и интегрирование накопленной дозы излучения, введенной в опухоли или другие мишени и OAR или другие области, предполагает, что положения и размеры опухолей или других мишеней и OAR или других областей остаются такими же, как в изображениях, на которых базируется RTP. Если эти положения или размеры изменяются, накопленные дозы излучения будут иметь погрешности. Поэтому для поддержания точности RTP периодически обновляется. Хотя RTP обычно обновляется между лечебными фракциями, допустимо, чтобы RTP обновлялись в ходе лечебных фракций, других заранее определенных периодов времени, непрерывно и пр.
Например, в ходе сеанса лучевой терапии, доза вводится с использованием множественных углов гентри (по одному). Флюенс, исходящий из каждого угла гентри, именуется пучком. Каждый пучок состоит из множественных сегментов, которые соответствуют разным конфигурациям положений лепестков многолепесткового коллиматора (МЛК). Каждый сегмент можно настроить на облучение конкретной области мишени. Традиционные схемы вычисления дозы совокупно суммируют дозы из каждого сегмента каждого пучка, для получения окончательного распределения дозы. Описанный ниже процесс вычисляет и сохраняет дозу из каждого сегмента каждого пучка по отдельности, помимо сетки накопленной дозы. В частности, распределение дозы можно разбивать на его составные компоненты на основании дополнительных или других факторов, например (но без ограничения) картин движения лепестков МЛК, скоростей лепестков, пути гентри, угловой скорости и т.д.
Для обновления RTP для пациента система 106 планирования обычно принимает одно или более новых изображений планирования. Например, система 106 планирования принимает изображения планирования после каждого или заранее определенного количества сеансов (или фракций) лучевой терапии. Как описано выше, изображения планирования надлежащим образом фокусируются на одну или более опухолей или других мишеней пациента. После приема нового изображения планирования или после приема заранее определенного количества новых изображений планирования, контуры (или траектории) и/или дозы RTP обычно обновляются путем сравнения новых изображений планирования с изображениями планирования, используемыми для генерации RTP и/или предыдущих фракций. Дополнительно или альтернативно, в некоторых вариантах осуществления, RTP обновляется с использованием модуля 112 дозы, скомпенсированной по движению/введению и модуля 114 дозиметрического анализа системы 106 планирования.
Модуль 112 дозы, скомпенсированной по движению/введению, вычисляет дозы, фактически вводимые пациенту (далее именуемые распределениями дозы, скомпенсированной по движению) в ходе одной или более фракций RTP на основании данных движения пациента, собранных в ходе фракций и/или между ними и временных метрик введения, собранных из каждого пучка/сегмента в разные моменты времени введения излучения. Устройство 118 контроля движения генерирует данные движения, указывающие движение опухолей или других мишеней и/или OAR или других областей, относительно предыдущих фракций и/или RTP. В этой связи данные движения обычно задаются в системе координат изображений планирования, применяемых для генерации предыдущей фракции и/или RTP. Устройство 120 контроля введения дозы генерирует временные метрические данные введения, указывающие временные метрики введения, принятые от устройства введения лечения, например, линейного ускорителя (LINAC) устройства лучевой терапии, которые детализируют состояние каждого пучка/сегмента в каждый момент времени введения излучения. Дополнительно, модуль 112 дозы, скомпенсированной по движению/введению, связывает информацию положения мишени/окружающей нормальной ткани в ходе лечения с конкретным компонентом распределения запланированной дозы с использованием временных метрических данных введения и использует это соотношение для вычисления дозы, фактически вводимой пациенту.
Данные движения обычно принимаются от одного или более суррогатов для опухолей, мишеней или других органов (далее именуемых суррогатными мишенями). Например, данные движения принимаются от трех суррогатных мишеней, находящихся в разных положениях в теле пациента. В некоторых вариантах осуществления суррогатные мишени являются РЧ приемоответчиками, расположенными рядом с мишенью. Устройство 118 контроля движения в одном варианте осуществления включает в себя радиоприемники в каждом из множества окружающих положений, которые отслеживают сигналы от приемоответчиков для сдвигов фазы или других индикаторов перемещения и определяют методом триангуляции положение каждого приемоответчика. Из пространственного соотношения между приемоответчиками и мишенью, указанного в самых последних изображениях планирования, определяется перемещение или изменение формы мишеней. В других вариантах осуществления суррогатные мишени являются фидуциальными метками, имплантированными в тело пациента. В одном варианте осуществления устройство 118 контроля движения включает в себя устройство формирования изображения, например ультразвукового формирования изображения, проекционной рентгенографии, магнитно-резонансного формирования изображения (МРИ), КТ формирование изображения, и т.п., действующее, например, в рентгеноскопическом режиме. Перемещение фидуциалов определяется посредством анализа рентгеноскопических изображений. В некоторых вариантах осуществления суррогатные мишени не применяются. Напротив, на основе изображений отслеживание движения применяется для приема данных движения. В одном варианте осуществления, устройство 118 контроля движения включает в себя вышеописанное устройство формирования изображения, которое облегчает отслеживание движения мишени на основе изображений в реальном времени с использованием, например, контуров или анатомических структур.
Данные движения могут приниматься непрерывно, по требованию, при наступлении события, например события таймера и т.д., но обычно принимаются периодически в ходе лучевой терапии, например, с частотой 10 Гц. Когда данные движения принимаются непрерывно, они надлежащим образом разбиваются на дискретные блоки на основании времени и алгоритма анализа тенденций, например, к дискретным блокам применяется минимальный, промежуточный, максимальный, средний и т.д.
От устройства 120 контроля введения дозы обычно принимаются временные метрические данные введения, которые детализируют состояние каждого пучка/сегмента в разные моменты времени введения излучения, например, картину введения излучения и упорядочение. Временные метрические данные введения включает в себя угловое положение гентри все время в ходе этой фракции с малыми приращениями времени, например, 10-50 мс, хотя можно использовать любую частоту, количество точек управления или сегментов, принадлежащих конкретному пучку, который активен в любой данный момент времени, и пр. Временные метрические данные введения могут приниматься непрерывно, по требованию, при наступлении события, и т.д., но обычно принимаются периодически в ходе установки и ведения лучевой терапии.
Одновременно со сбором данных движения или после него модуль 112 дозы, скомпенсированной по движению/введению, использует данные движения из мишени и/или окружающей нормальной ткани и временные метрические данные введения для вычисления распределения дозы, скомпенсированной по движению. В частности, модуль 112 дозы, скомпенсированной по движению/введению, коррелирует данные движения, указывающие движение опухолей или других мишеней и/или OAR или других областей на каждом временном этапе с временными метрическими данными введения, указывающими временные метрики введения, принятые от устройства введения лечения, например LINAC.
В некоторых вариантах осуществления это включает в себя, для каждого временного этапа (или выборки) собранных данных движения, оценивание жесткого или деформируемого движения суррогатных мишеней относительно самого последнего изображения планирования, используемого для генерации RTP для фракции, связанной с временным этапом. Например, пусть данные движения для трех суррогатных мишеней собираются на протяжении курса из двух лечебных фракций. Оценка движения определяется для мишени и тканей эпидермиса относительно самого последнего изображения планирования, используемого для первой фракции. Оценка движения указывает диапазон положений, через которые перемещается мишень, и частоту, с которой мишень находится в каждом положении. Компоненты жесткого движения включают в себя параллельные переносы и повороты. Также может применяться нежесткое движение.
После определения оценок движения определяется картина накопленного движения для опухоли или другой мишени в ходе, по меньшей мере, части фракции. В частности, каждая из оценок движения, соответствующих данной комбинации активного сегмента и пучка, группируются друг с другом. Таким образом, для каждого активного сегмента, принадлежащего конкретному пучку, существует группа оценок движения, которые соответствуют движению, совершаемому мишенью в эти моменты времени. Затем оценки движения из каждой группы группируются со всеми вокселями мишени, и одна или более функций плотности вероятности (PDF) создаются для каждой из опухолей или других мишеней на основании оценок движения для каждой группы. Эти PDF представляют движение картин мишени в ходе каждой активной комбинации сегмент-пучок.
PDF или другая модель ухудшения создается путем применения каждой из оценок движения и соответствующих временных метрических данных введения, связанных с лечебной фракцией, к опухоли или другой мишени для получения положения, скомпенсированного по движению. Движение опухоли или другой мишени и временные метрические данные введения накапливаются в PDF для определения картины накопленного движения опухоли или другой мишени в ходе фракции. Применение оценки движения к опухоли или другой мишени и временным метрическим данным введения демонстрирует часть времени в ходе облучения лечебным пучком, когда мишень полностью или частично находилась вне лечебного пучка, и какие части находились вне пучка и насколько долго.
Для каждой из PDF распределение запланированной дозы, соответствующее PDF, свертывается с PDF для определения распределения дозы, скомпенсированной по движению, для фракции(й), соответствующей(им) PDF. В частности, сетки дозы свертываются с надлежащей группой PDF для генерации компонентов сетки дозы, скомпенсированной по движению. Окончательное распределение дозы, скомпенсированной по движению, вычисляется путем суммирования всех сеток дозы, скомпенсированной по движению. Распределения дозы, скомпенсированной по движению, для опухоли или другой мишени могут накапливаться до конца части (или подмножества) фракции, одной фракции или подмножества фракций.
Альтернативно, движение каждой выборки или некоторых подвыборок данных движения можно применять непосредственно к положению распределения дозы для создания распределения дозы, скомпенсированной по движению. Распределение дозы, скомпенсированной по движению, можно взвешивать на основании продолжительности времени, которой представляют выборки, и суммировать для создания составного распределения дозы, скомпенсированной по движению.
Модуль 114 дозиметрического анализа сравнивает, качественно или количественно, распределения дозы, скомпенсированной по движению, опухолей или других мишеней с соответствующими распределениями запланированной дозы. Обычно, но не обязательно, распределения дозы, скомпенсированной по движению, принимаются от модуля 112 дозы, скомпенсированной по движению/введению. В некоторых вариантах осуществления, при обнаружении значительных дозиметрических отклонений от распределений запланированной дозы, формирование изображения осуществляется с использованием устройств 102 формирования изображения как проверка в реальных условиях на распределениях дозы, скомпенсированной по движению.
Для качественного сравнения распределения дозы, скомпенсированной по движению, опухоли или другой мишени с распределением запланированной дозы, распределение дозы, скомпенсированной по движению, и распределение запланированной дозы графически отображаются на графическом пользовательском интерфейсе, представляемом онкологу или другому клиницисту посредством дисплея 110. В некоторых вариантах осуществления распределения дозы отображаются рядом друг с другом, например, бок о бок. В других вариантах осуществления, распределения дозы отображаются с наложением друг на друга с изменяющейся прозрачностью. Надлежащим образом для идентификации интенсивности дозы применяется цвет. Например, для идентификации относительной интенсивности применяется градиент, где более темный цвет соответствует более высокой интенсивности. Дополнительно, на него можно накладывать контуры (или траектории). Используя устройства 108 пользовательского ввода, клиницист может последовательно продвигаться по срезам в любом измерении (например, поперечном, сагиттальном, корональном, наклонном и т.д.) и наблюдать результирующие двухмерные распределения дозы для среза. Допустимы срезы или проекции, поперечные одной или более траекториям лечебного пучка. Преимущественно, это может помогать в идентификации очевидных и/или крупномасштабных различий в дозе и их пространственных положений. Другими словами, то может помогать в идентификации горячих пятен и/или холодных пятен. Горячее пятно - это область, где было принято больше излучения, чем ожидалось, и холодное пятно - это область, где было принято меньше излучения, чем ожидалось. В некоторых вариантах осуществления качественное сравнение дополнительно включает в себя прием данных сравнения от устройства 108 пользовательского ввода, причем данные сравнения указывают дозиметрические различия между распределениями дозы, например, степень подобия распределений дозы, положение горячих пятен и/или холодных пятен и т.д.
Для количественного сравнения распределений дозы, допустимо несколько разных подходов. В некоторых вариантах осуществления вычисляется разность между распределением запланированной дозы и распределением дозы, скомпенсированной по движению. Разность обеспечивает информацию, касающуюся присутствия холодных пятен (или горячих пятен) в отношении, по меньшей мере, одного из величины, положения и протяженности. Пороги могут, например, применяться к разности для идентификации холодных пятен и/или горячих пятен. Дополнительно или альтернативно, в некоторых вариантах осуществления, сравниваются одна или более из гистограмм доза-объем (DVH), максимальных доз, средних доз, минимальных доз, дозы в заданных пользователем объемах и т.д. обоих распределений дозы. Пороги могут, например, применяться к сравнению для упрощения идентификации клинически значимых различий. Дополнительно или альтернативно, в некоторых вариантах осуществления, дозиметрическое влияние движения количественно определяется как взвешенная комбинация вышеупомянутых факторов, где весовые коэффициенты назначаются онкологом или другим клиницистом.
Для осуществления послелечебного анализа RTP система 106 планирования принимает одно или более изображений по завершении RTP и/или данные движения, как описано выше. Изображения надлежащим образом фокусируются на одну или более опухолей или других мишеней пациента. После приема новых изображений и/или данных движения, по меньшей мере, один из модуля 112 дозы, скомпенсированной по движению/введению, и модуля 114 дозиметрического анализа применяются для анализа RTP. Определяются значения накопленной дозы, скорректированной по движению. RTP регулируется в соответствии с новым изображением, накопленной дозой, моделью движения и пр. Например, модуль 114 дозиметрического анализа можно использовать для изучения влияния движения на RTP.
Система 106 планирования надлежащим образом включает в себя один или более блоков 140 памяти и один или более контроллеров 142 на основе процессора. В блоках 140 памяти хранятся исполнимые инструкции для управления процессором контроллеров 142 на основе процессора для осуществления одного или более из вышеупомянутых функций системы 106 планирования. Дополнительно, в некоторых вариантах осуществления, по меньшей мере, один из модуля 112 дозы, скомпенсированной по движению/введению, и модуля 114 дозиметрического анализа реализуются исполнимыми инструкциями, хранящимися, например, в блоках 140 памяти. Контроллеры 142 на основе процессора выполняют исполнимые инструкции, хранящиеся на блоках 140 памяти для осуществления функций, связанных с системой 106 планирования. Когда система 106 планирования способна осуществлять, по меньшей мере, одно из приема изображений из сети связи, сохранения RTP по сети связи и приема данных движения из сети связи, система 106 планирования дополнительно включает в себя один или более блоков 144 связи, облегчающих связь между контроллерами 142 на основе процессора и сетями связи.
RTP, генерируемые и/или обновляемые системой 106 планирования, сохраняются в памяти 146 планов лучевой терапии. Обычно память 146 планов лучевой терапии представляет собой центральную систему хранения записей. Однако допустимо, чтобы память 146 планов лучевой терапии была локальна по отношению к системе 106 планирования или другому компоненту системы 100 лучевой терапии. Постольку поскольку память 146 планов лучевой терапии является удаленной от системы 106 планирования, память 146 планов лучевой терапии надлежащим образом соединена с ней через сеть связи, например, локальную сеть (LAN).
В запланированный день и час для сеанса лучевой терапии или фракции RTP, устройство 148 лучевой терапии применяется для введения терапевтического излучения пациенту. Излучение может включать в себя гамма-лучи, частицы, рентгеновское излучение, протоны, тепло, звук и т.д., пригодные для лучевой терапии, например, наружной дистанционной лучевой терапии, протонной терапии, абляционной терапии и терапии высокоинтенсивным фокусированным ультразвуком. Надлежащим образом устройство 148 лучевой терапии управляется системой 150 управления лучевой терапией в соответствии с RTP, хранящимся в памяти 146 планов лучевой терапии. Например, в проиллюстрированном варианте осуществления устройство 148 ведения лучевой терапии включает в себя линейный ускоритель (LINAC), и система 150 управления лучевой терапией задействует многолепестковый коллиматор (МЛК) или другое устройство формирования профиля пучка излучения LINAC для модуляции интенсивности пучка и профиля, когда линейный ускоритель перемещается или скачкообразно перемещается вокруг субъекта, чтобы, таким образом, вводить распределение дозы излучения в субъект, который обеспечивает желаемую интегрированную дозу облучения в признак мишени, в то же время, надлежащим образом ограничивая экспозицию излучением критически важных признаков в соответствии с RTP.
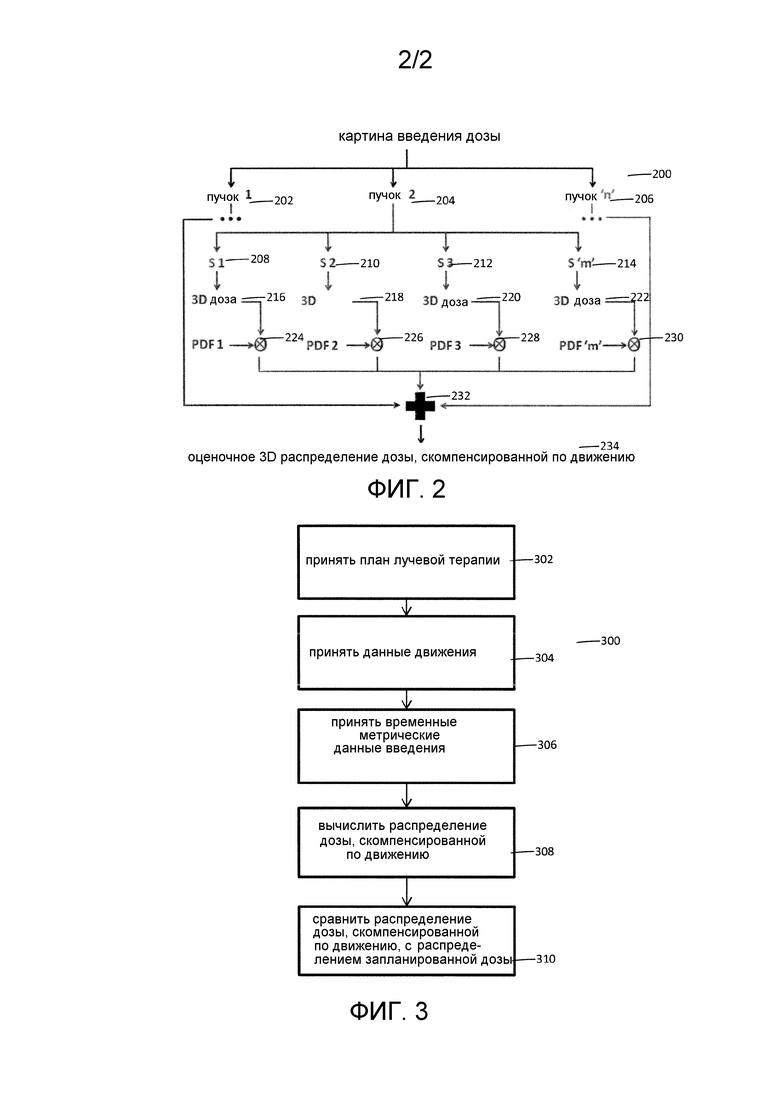
На Фиг. 2 представлена блок-схема картины введения дозы. Картина 200 введения дозы включает в себя множество пучков 202, 204, 206 излучения. Каждый из проиллюстрированных пучков 202, 204, 206 представляет все параметры, относящиеся к конкретному пучку. Каждый из пучков 202, 204, 206 состоит из одного или более сегментов 208, 210, 212, 214 и каждый из сегментов имеет распределение 216, 218, 220, 222 дозы и связанную с ним PDF 224, 226, 228, 230 движения. Как показано, вся структура разработана только для пучка 2, но допустимо, чтобы пучок 1 и пучок ‘n’ имели аналогичные структуры. Сетки запланированной дозы суммируются друг с другом 232 для генерации окончательного распределения 234 дозы, скомпенсированной по движению.
На Фиг. 3 представлена блок-схема способа 300, осуществляемого одним или более процессорами для генерации лечения для конкретного пациента. План лучевой терапии (RTP) для облучения мишени на протяжении курса из одной или более лечебных фракций генерируется или принимается 302. RTP включает в себя распределение запланированной дозы для мишени. В ходе, по меньшей мере, одной из лечебных фракций, данные движения принимаются 304. Дополнительно, в ходе, по меньшей мере, одной из лечебных фракций, временные метрические данные введения принимаются 306. Распределение дозы, скомпенсированной по движению, для мишени вычисляется 308 с использованием данных движения и временных метрических данных введения и распределения запланированной дозы. Распределение дозы, скомпенсированной по движению, для мишени с использованием данных движения и временных метрических данных введения для регулировки распределения запланированной дозы на основании принятых данных движения и временных метрических данных введения. После вычисления распределения дозы, скомпенсированной по движению, оно сравнивается 310 с распределением запланированной дозы.
Используемый здесь термин «память» включает в себя один или более из неизменяемого машиночитаемого носителя; магнитного диска или другого магнитного носителя данных; оптического диска или другого оптического носителя данных; оперативной памяти (ОЗУ), постоянной памяти (ПЗУ), или другого электронного запоминающего устройства или микросхемы или набора оперативно соединенных между собой микросхем; интернет/интрасетевой сервер, с которого сохраненные инструкции могут извлекаться через интернет/интрасеть или локальную сеть; и т.д. Дополнительно используемый здесь термин «контроллер» на основе процессора включает в себя один или более из микропроцессора, микроконтроллера, графического процессора (ГП), специализированной интегральной схемы (ASIC), вентильной матрицы, программируемой пользователем (FPGA) и пр.; устройство пользовательского ввода включает в себя один или более из мыши, клавиатуры, дисплея с сенсорным экраном, одну или более кнопок, один или более переключателей, один или более тумблеров и пр.; и дисплей включает в себя один или более из ЖКД дисплея, СИД дисплея, плазменного дисплея, проекционного дисплея, дисплея с сенсорным экраном, и пр.
Изобретение описано со ссылкой на предпочтительные варианты осуществления. Можно предложить модификации и изменения по ознакомлении с вышеприведенным подробным описанием. Предполагается, что изобретение можно рассматривать как включающее в себя все подобные модификации и изменения постольку поскольку они отвечают объему нижеследующей формулы изобретения или их эквивалентам.
Группа изобретений относится к медицинской технике, а именно к наружной дистанционной лучевой терапии. Система планирования лечения для генерации лечения для конкретного пациента содержит один или более процессоров, запрограммированных принимать план лучевой терапии (RTP) для облучения мишени на протяжении курса из одной или более лечебных фракций, который включает в себя распределение запланированной дозы, подлежащей введению в мишень, принимать данные движения пациента для, по меньшей мере, одной из лечебных фракций RTP, принимать временные метрические данные введения для, по меньшей мере, одной из лечебных фракций RTP, вычислять распределение дозы, скомпенсированной по движению, для мишени с использованием данных движения и временных метрических данных введения, и сравнивать распределение дозы, скомпенсированной по движению, с распределением запланированной дозы, при этом временные метрические данные введения включают в себя угловые положения гентри все время в ходе этой фракции и количества сегментов, принадлежащих конкретному пучку, который активен в любой данный момент времени. Система лучевой терапии содержит одно или более устройств формирования изображения, систему планирования, устройство лучевой терапии, устройство контроля введения дозы, и устройство контроля движения, генерирующее данные движения из суррогатных мишеней мишени. Способ генерации лечения для конкретного пациента содержит этапы, которые осуществляются с использованием системы планирования лечения. Система лучевой терапии по второму варианту выполнения дополнительно содержит один или более процессоров, запрограммированных принимать RTP для облучения мишени на протяжении курса из одной или более лечебных фракций. Использование изобретений позволяет повысить точность введенной дозы. 3 н. и 11 з.п. ф-лы, 3 ил.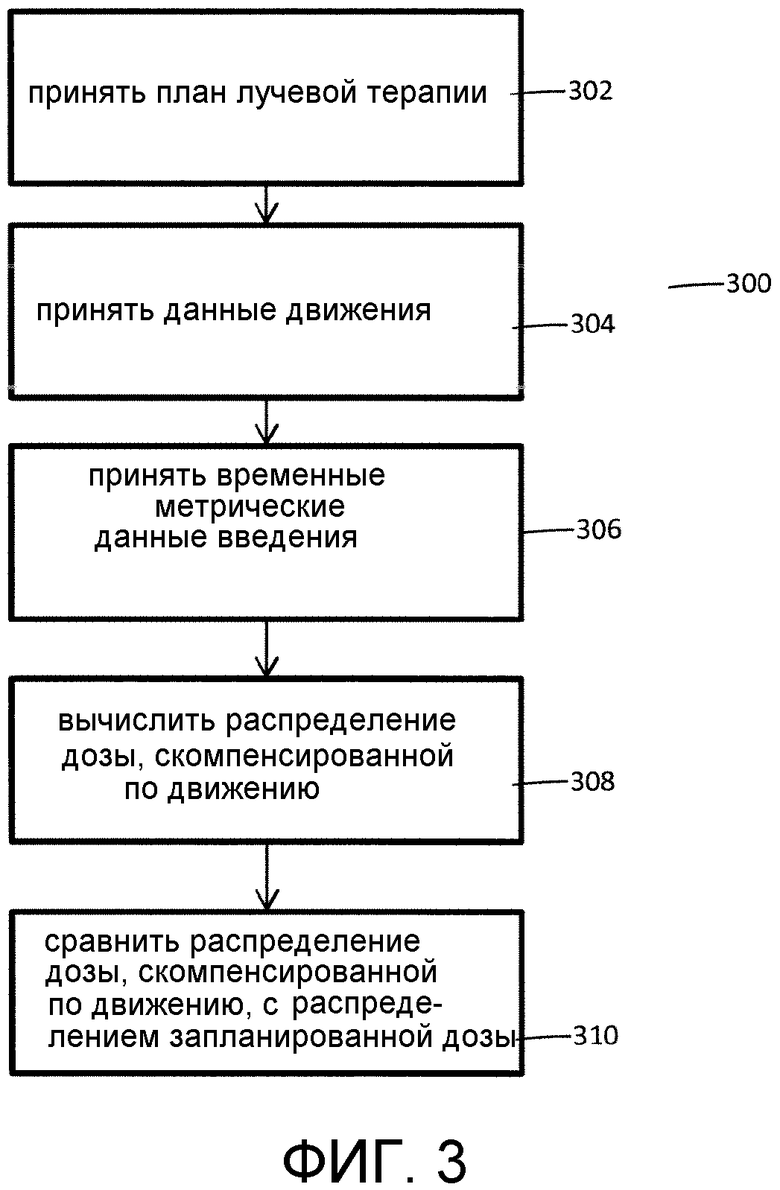
1. Система (106) планирования лечения для генерации лечения для конкретного пациента, причем упомянутая система (106) содержит:
один или более процессоров (142), запрограммированных:
принимать план лучевой терапии (RTP) для облучения мишени на протяжении курса из одной или более лечебных фракций, причем упомянутый RTP включает в себя распределение запланированной дозы, подлежащей введению в мишень,
принимать данные движения пациента для, по меньшей мере, одной из лечебных фракций RTP;
принимать временные метрические данные введения для, по меньшей мере, одной из лечебных фракций RTP;
вычислять распределение дозы, скомпенсированной по движению, для мишени с использованием данных движения и временных метрических данных введения; и
сравнивать распределение дозы, скомпенсированной по движению, с распределением запланированной дозы;
при этом временные метрические данные введения включают в себя угловые положения гентри все время в ходе этой фракции и количества сегментов, принадлежащих конкретному пучку, который активен в любой данный момент времени.
2. Система (106) по п. 1, дополнительно включающая в себя:
генерацию сеток запланированной дозы для каждого пучка из данных движения и временных метрических данных введения;
вычисление распределения дозы, скомпенсированной по движению, путем суммирования каждой из сеток запланированной дозы; и
регулировку распределения запланированной дозы на основании принятых данных движения и временных метрических данных введения.
3. Система (106) по п. 1, в которой распределение запланированной дозы вычисляется из каждого сегмента пучка и коррелируется с данными движения для оценивания дозы, скомпенсированной по движению, полученной мишенью.
4. Система (106) по п. 1, дополнительно включающая в себя:
регулировку распределения запланированной дозы на основании распределения дозы, скомпенсированной по движению.
5. Система (106) по п. 1, в которой вычисление включает в себя:
создание одной или более функций плотности вероятности (PDF) из данных движения и временных метрических данных введения, причем каждая из упомянутых PDF представляет собой картину накопленного движения и введения для мишени или органа в ходе одной или более лечебных фракций или любого другого периода, когда осуществляется сбор данных движения.
6. Система (106) по п. 5, в которой вычисление дополнительно включает в себя:
свертку распределений запланированной дозы с PDF для определения одной или более из доз, скомпенсированных по движению, указывающих дозу, фактически вводимую в мишень.
7. Система (106) по п. 1, дополнительно включающая в себя:
дисплей (110);
причем сравнение включает в себя, по меньшей мере, одно из:
отображения распределения дозы, скомпенсированной по движению, рядом с распределением запланированной дозы на дисплее (110); и
отображения распределения дозы, скомпенсированной по движению, с наложением на распределение запланированной дозы.
8. Система (100) лучевой терапии, причем упомянутая система содержит:
одно или более устройств (102) формирования изображения, которые получают одно или более изображений планирования;
систему (106) планирования по п. 1, которая генерирует план лучевой терапии (RTP) для облучения мишени на протяжении курса из одной или более лечебных фракций из изображений планирования, причем упомянутый RTP включает в себя распределение запланированной дозы для мишени;
устройство (148) лучевой терапии для ведения лучевой терапии в соответствии с RTP;
устройство (120) контроля введения дозы, генерирующее временные метрические данные введения, указывающие временные метрики введения устройства лучевой терапии; и
устройство (118) контроля движения, генерирующее данные движения из суррогатных мишеней (124) мишени.
9. Способ генерации лечения для конкретного пациента, причем упомянутый способ содержит этапы, на которых:
принимают план лучевой терапии (RTP) для облучения мишени на протяжении курса из одной или более лечебных фракций, причем упомянутый RTP включает в себя распределение запланированной дозы для мишени;
принимают данные движения пациента для, по меньшей мере, одной из лечебных фракций RTP;
принимают временные метрические данные введения для, по меньшей мере, одной из лечебных фракций RTP, при этом временные метрические данные введения включают в себя угловые положения гентри все время в ходе этой фракции и количества сегментов, принадлежащих конкретному пучку, который активен в любой данный момент времени;
вычисляют распределение дозы, скомпенсированной по движению, для мишени с использованием данных движения и временных метрических данных введения для регулировки распределения запланированной дозы на основании принятых данных движения и временных метрических данных введения; и
сравнивают распределение дозы, скомпенсированной по движению, с распределением запланированной дозы.
10. Способ по п. 9, дополнительно включающий в себя этап, на котором:
регулируют запланированный план лечения на основании дозиметрических различий между распределением дозы, скомпенсированной по движению, и распределением запланированной дозы.
11. Способ по любому из пп. 9 и 10, дополнительно включающий в себя этапы, на которых:
генерируют сетки запланированной дозы для каждого пучка из данных движения и временных метрических данных введения; и
вычисляют распределения дозы, скомпенсированной по движению, путем суммирования каждой из сеток запланированной дозы.
12. Способ по любому из пп. 9 и 10, в котором вычисление включает в себя этапы, на которых:
создают одну или более функций плотности вероятности (PDF) из данных движения и временных метрических данных введения, причем каждая из упомянутых PDF представляет собой картину накопленного движения мишени или органа в ходе одной или более лечебных фракций или любого другого периода, когда осуществляется сбор данных движения; и
осуществляют свертку распределений запланированной дозы с PDF для определения одной или более из доз, скомпенсированных по движению, указывающих дозу, фактически вводимую в мишень.
13. Способ по любому из пп. 9 и 10, в котором сравнение включает в себя, по меньшей мере, один из этапов, на которых:
отображают распределение дозы, скомпенсированной по движению, рядом с распределением запланированной дозы;
отображают распределение дозы, скомпенсированной по движению, с наложением на распределение запланированной дозы; и
вычисляют разность между распределением дозы, скомпенсированной по движению, и распределением запланированной дозы.
14. Система (100) лучевой терапии, содержащая:
устройство (148) лучевой терапии для ведения лучевой терапии в соответствии с RTP;
устройство (118) контроля движения, генерирующее данные движения из суррогатных мишеней мишени;
устройство (120) контроля введения дозы, генерирующее временные метрические данные введения, указывающие временные метрики введения устройства лучевой терапии; и
один или более процессоров (142), запрограммированных:
принимать RTP для облучения мишени на протяжении курса из одной или более лечебных фракций, причем упомянутый RTP включает в себя распределение запланированной дозы для мишени;
принимать данные движения для, по меньшей мере, одной из лечебных фракций RTP;
принимать временные метрические данные введения для, по меньшей мере, одной из лечебных фракций RTP, при этом временные метрические данные введения включают в себя угловые положения гентри все время в ходе этой фракции и количества сегментов, принадлежащих конкретному пучку, который активен в любой данный момент времени;
вычислять распределение дозы, скомпенсированной по движению, для мишени с использованием данных движения и временных метрических данных введения; и
сравнивать распределение дозы, скомпенсированной по движению, с распределением запланированной дозы.
| US 2009116616 A1, 07.05.2009 | |||
| Geoffrey D Hugo et al | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| US 2010012829 A1, 21.01.2010 | |||
| Приспособление для удаления из колодцев тяжелых газов | 1928 |
|
SU10207A1 |

