Область техники, к которой относится изобретение
Настоящее изобретение в целом относится к оборудованию и операциям, применяемым при бурении скважины, и, как раскрыто в приведенном ниже варианте осуществления изобретения, в частности - к управлению давлением и потоком при буровых работах.
Предпосылки создания изобретения
Известна технология бурения с управляемым давлением, заключающаяся в точном управлении давлением в стволе скважины при бурении с использованием закрытого кольцевого пространства и средств регулирования давления в этом кольцевом пространстве. Кольцевое пространство при бурении обычно закрывают посредством вращающегося превентора (RCD, от англ. rotating control device, также называемого вращающейся управляющей головкой, вращающимся противовыбросовым превентором и т.п.), обеспечивающего уплотнение вокруг бурильной трубы в процессе бурения скважины.
Таким образом, понятно, что задача совершенствования технологии управления давлением и потоком при буровых работах является актуальной.
Краткое описание чертежей
На фиг. 1 показан пример функциональной схемы системы бурения скважины и способа, реализующих принципы настоящего изобретения.
На фиг. 2 показан пример функциональной схемы другой конфигурации системы бурения скважины.
На фиг. 3 показан пример структурной схемы системы управления давлением и потоком, которая может быть использована в указанной системе бурения скважины и указанном способе.
На фиг. 4 показан пример блок-схемы алгоритма способа выполнения соединительной операции в бурильной колонне, который может быть использован в указанной системе бурения скважины и указанном способе.
На фиг. 5 показан пример структурной схемы другой конфигурации системы управления давлением и потоком.
На фиг. 6-8 показаны примеры структурных схем разных конфигураций прогнозирующего устройства, которые могут быть использованы в системе управления давлением и потоком, приведенной на фиг. 5.
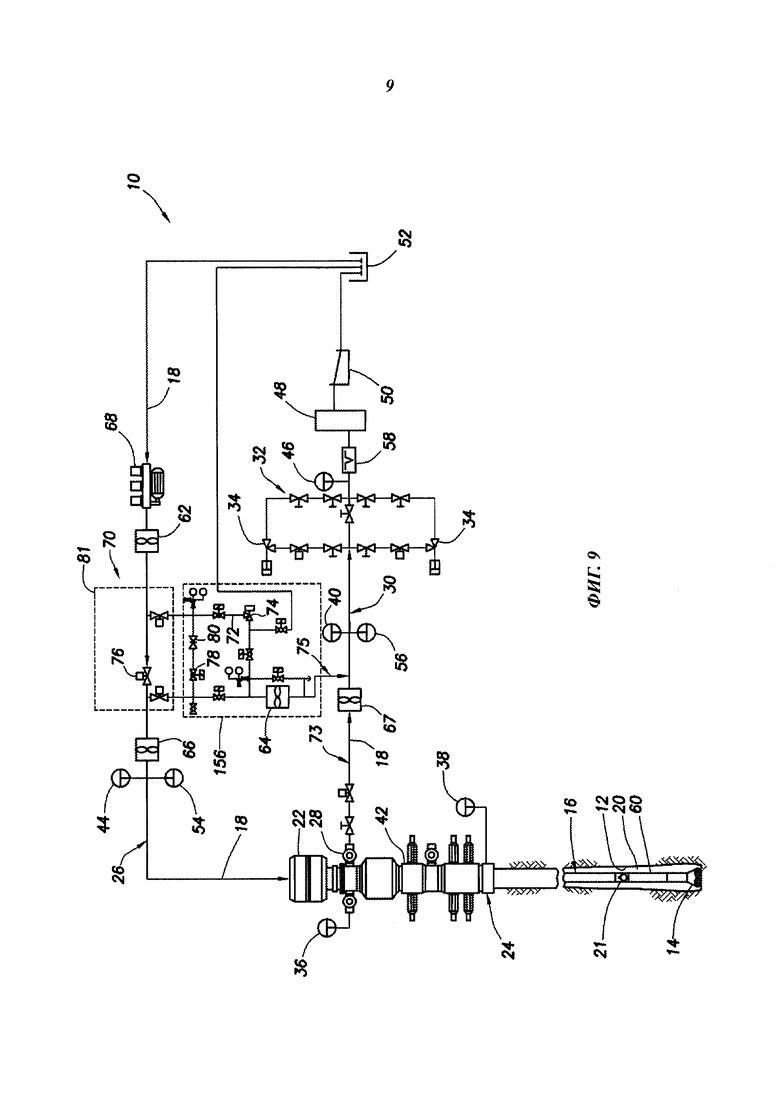
На фиг. 9 показан пример функциональной схемы еще одной конфигурации системы бурения скважины.
На фиг. 10 показан пример функциональной схемы еще одной конфигурации системы бурения скважины.
На фиг. 11 показана блок-схема алгоритма способа управления давлением в скважине, который может воплощать принципы настоящего изобретения.
Подробное раскрытие изобретения
На фиг. 1 схематически показан пример системы 10 бурения скважины и соответствующего способа, которые могут реализовать принципы настоящего изобретения. В системе 10 бурение ствола 12 скважины осуществляют посредством вращающегося бурового долота 14, установленного на конце трубчатой бурильной колонны 16. Нагнетаемый буровой раствор 18 циркулирует по контуру, перемещаясь вниз по бурильной колонне 16, выходя из бурового долота 14 и перемещаясь вверх по кольцевому пространству 20, образованному между бурильной колонной и стволом 12 скважины, при этом осуществляется охлаждение бурового долота, смазка бурильной колонны, удаление бурового шлама и измерение давления на забое скважины. Восходящий поток бурового раствора 18 через бурильную колонну 16 (который может возникнуть, например при подсоединении компонентов в бурильной колонне) предотвращают обратным клапаном 21 (обычно захлопывающегося типа).
При бурении с управляемым давлением, а также при других буровых работах важно обеспечить регулирование давления в стволе скважины. Предпочтительно, точное регулирование давления в стволе скважины позволяет предотвратить чрезмерное поглощение бурового раствора пластом, окружающим ствол 12 скважины, нежелательный разрыв этого пласта, нежелательный приток пластовых флюидов в ствол скважины и т.п.
При бурении с управляемым давлением, как правило, требуется поддерживать давление в стволе скважины несколько выше пластового давления, не превышая при этом давления разрыва пласта. Такой подход особенно полезен в случае незначительной разницы между пластовым давлением и давлением разрыва пласта.
При бурении на депрессии для контроля притока текучей среды из пласта обычно требуется поддерживать давление в стволе скважины несколько ниже пластового давления. При бурении на репрессии для контроля притока текучей среды из пласта (или по меньшей мере для его уменьшения) обычно требуется поддерживать давление в стволе скважины несколько выше пластового давления.
Для управления давлением в буровой раствор 18 можно добавлять азот или другой газ, или иную более легкую текучую среду. Такой подход эффективен, например при бурении на депрессии.
В системе 10 дополнительное управление давлением в стволе скважины обеспечивают путем перекрытия кольцевого пространства 20 (например, посредством его изоляции от атмосферы с последующим увеличением давления в данном кольцевом пространстве на поверхности или у поверхности) при помощи вращающегося превентора (RCD) 22. Вращающийся превентор (RCD) 22 обеспечивает уплотнение бурильной колонны 16 над устьем 24 скважины. На фиг. 1 не показано, но бурильная колонна 16 может проходить вверх через вращающийся превентор (RCD) 22 и соединяться, например, с поворотным столом (не показан), нагнетательной линией 26, ведущей трубой (не показана), верхним приводом и/или прочим стандартным буровым оборудованием.
Буровой раствор 18 выходит из устья 24 скважины через клапан 28 на отводящей линии, сообщающийся с кольцевым пространством 20 и расположенный под вращающимся превентором (RCD) 22. Буровой раствор 18 далее протекает по линиям 30, 73 возврата бурового раствора в дроссельный манифольд 32, содержащий резервные дроссели 34 (в отдельный момент времени может быть задействован только один дроссель). Путем регулируемого изменения сопротивления потоку бурового раствора 18, протекающему через задействованный дроссель (задействованные дроссели) 34, к кольцевому пространству 20 прикладывают противодавление.
Чем выше сопротивление потоку, протекающему через дроссель 34, тем выше противодавление, прикладываемое к кольцевому пространству 20. Таким образом, давление в стволе скважины (например, давление на забое ствола 12 скважины, давление на башмаке обсадной колонны, давление в конкретном пласте или в конкретной зоне и т.п.) можно регулировать стандартным способом путем изменения противодавления, прикладываемого к кольцевому пространству 20. Для определения давления, прикладываемого к кольцевому пространству 20 на поверхности или у поверхности и требуемого для создания желаемого давления на забое, могут использовать гидравлическую модель, позволяющую оператору (или системе автоматического управления) корректировать давление, прикладываемое к кольцевому пространству на поверхности или у поверхности (которое можно измерить стандартными средствами), для получения требуемого давления на забое.
Давление, прикладываемое к кольцевому пространству 20, можно измерять на поверхности или у поверхности при помощи множества датчиков 36, 38, 40 давления, каждый из которых сообщается с данным кольцевым пространством. Датчик 36 давления измеряет давление в точке, расположенной ниже вращающегося превентора (RCD) 22, но выше блока 42 противовыбросовых превенторов (ВОР, от англ. blowout preventer). Датчик 38 давления измеряет давление на устье скважины ниже блока 42 противовыбросовых превенторов (ВОР). Датчик 40 давления измеряет давление в линиях 30, 73 возврата бурового раствора перед дроссельным манифольдом 32.
Другой датчик 44 давления измеряет давление в нагнетательной линии 26. Еще один датчик 46 давления измеряет давление после дроссельного манифольда 32, но перед сепаратором 48, виброситом 50 и резервуаром 52 для бурового раствора. К дополнительным датчикам относятся датчики 54, 56 температуры, кориолисов расходомер 58 и расходомеры 62, 64, 66.
Не все из этих датчиков обязательны для использования. Например, система 10 может содержать только два из трех расходомеров 62, 64, 66. При этом для определения требуемого уровня давления, прикладываемого к кольцевому пространству 20 в процессе бурения, в упомянутой гидравлической модели используются входные сигналы от всех доступных датчиков.
При необходимости можно использовать датчики других типов. Например, расходомер 58 необязательно должен представлять собой кориолисов расходомер, вместо него можно использовать турбинный расходомер, ультразвуковой расходомер или расходомер иного типа.
Кроме того, бурильная колонна 16 может иметь собственные датчики 60, предназначенные, например, для прямого измерения давления на забое. Такие датчики 60 могут быть известны специалистам и могут входить в состав средств измерения давления в процессе бурения (PWD, от англ. pressure while drilling), средств инклинометрии в процессе бурения (MWD, от англ. measurement while drilling) и/или средств каротажа в процессе бурения (LWD, от англ. logging while drilling). Такие измерительные системы бурильной колонны обычно обеспечивают измерение, по меньшей мере, давления, а также могут осуществлять измерение температуры, измерение характеристик бурильной колонны (например, вибрации, нагрузки на долото, неравномерности перемещения и т.п.), измерение характеристик пласта (например, удельного электрического сопротивления, плотности и т.п.) и/или другие измерения. Для передачи данных от расположенных в скважине датчиков на поверхность можно использовать различные проводные или беспроводные телеметрические средства (звуковые сигналы, пульсации давления, электромагнитные сигналы и др.).
При необходимости в систему 10 могут быть введены дополнительные датчики. Например, для измерения расхода потока бурового раствора 18 на выходе из устья 24 скважины можно использовать другой расходомер 67, на входе или на выходе бурового насоса 68 может быть установлен другой кориолисов расходомер (не показан) и т.д.
При необходимости в системе 10 может быть установлено меньшее количество датчиков. Например, расход на выходе бурового насоса 68 можно определять не при помощи расходомера 62 или других расходомеров, а по количеству ходов поршня этого насоса.
Следует отметить, что сепаратор 48 может быть трехфазным или четырехфазным или может представлять собой сепаратор газа и бурового раствора (также называемый дегазатором бурового раствора). Однако использование сепаратора 48 в системе 10 не обязательно.
Буровой раствор 18 прокачивают через нагнетательную линию 26 и внутреннее пространство бурильной колонны 16 буровым насосом 68. Буровой раствор 18 поступает на вход бурового насоса 68 из резервуара 52 для бурового раствора, затем передается насосом 68 через распределитель 70 нагнетательной линии в нагнетательную линию 26, прокачивается через нагнетательную линию 26 и подается во внутреннее пространство бурильной колонны 16. Далее буровой раствор 18 продолжает движение по контуру, перемещаясь вниз через бурильную колонну 16, вверх через кольцевое пространство 20, по линиям 30, 73 возврата бурового раствора, через дроссельный манифольд 32 и затем через сепаратор 48 и вибросито 50 в резервуар 52 для подготовки к очередному циклу циркуляции.
Следует отметить, что согласно раскрытому выше в системе 10 дроссель 34 не может использоваться для регулирования противодавления, прикладываемого к кольцевому пространству 20, с целью изменения давления на забое, если буровой раствор 18 не протекает через этот дроссель. В процессе стандартного бурения на репрессии при выполнении наращивания бурильной колонны 16 (например, при добавлении к бурильной колонне бурильной трубы другой длины при углублении ствола 12 скважины) может образоваться недостаток потока бурового раствора 18 и произойти падение давления в контуре его циркуляции, в результате чего регулирование давления на забое будет возможно только путем изменения плотности бурового раствора 18.
Однако в системе 10 при наращивании бурильной колонны поток бурового раствора 18 через дроссель 34 можно поддерживать даже при отсутствии циркуляции бурового раствора через бурильную колонну 16 и кольцевое пространство 20. Таким образом, давление в кольцевом пространстве 20 можно продолжать регулировать путем ограничения потока бурового раствора 18 через дроссель 34, даже без необходимости использования отдельного насоса противодавления.
Когда буровой раствор 18 не циркулирует через бурильную колонну 16 и кольцевое пространство 20 (например, при выполнении наращивания в бурильной колонне), буровой раствор 18 направляют насосом 68 в дроссельный манифольд 32 через обводную линию 72, 75. Следовательно, буровой раствор 18 может протекать в обход нагнетательной линии 26, бурильной колонны 16 и кольцевого пространства 20 и может поступать непосредственно с выхода насоса 68 в линию 30 возврата бурового раствора, которая остается в гидравлическом сообщении с кольцевым пространством 20. Таким образом, в результате ограничения этого потока дросселем 34 к кольцевому пространству 20 будет прикладываться давление (например, при стандартном бурении с управляемым давлением).
Как показано на фиг. 1, и обводная линия 75, и линия 30 возврата бурового раствора сообщаются с кольцевым пространством 20 через одну линию 73. Однако, в ином случае, обводная линия 75 и линия 30 возврата бурового раствора могут соединяться с устьем 24 по отдельности, например при помощи дополнительного клапана отводящей линии (например, установленным ниже вращающегося превентора (RCD) 22), при этом каждая из линий 30, 75 сообщалась бы с кольцевым пространством 20 напрямую.
Для реализации такой конфигурации на буровой установке могла бы потребоваться проводка дополнительных труб, однако воздействие на давление в кольцевом пространстве было бы по существу таким же, как и в случае соединения обводной линии 75 и линии 30 возврата бурового раствора с общей линией 73. Таким образом, понятно, что можно использовать различные конфигурации компонентов системы 10 без отклонения от сути настоящего изобретения.
Потоком бурового раствора 18, протекающим через обводную линию 72, 75, управляют при помощи дросселя или устройства 74 регулирования потока другого типа. Линия 72 находится на входе обводного устройства 74 регулирования потока, а линия 75 находится на выходе этого устройства.
Потоком бурового раствора 18 через нагнетательную линию 26, по существу управляют при помощи клапана или устройства 76 регулирования потока другого типа. Необходимо отметить, что устройствами 74, 76 регулирования потока управляют независимо, что характеризуется существенной пользой для системы 10 (как подробнее описано ниже).
Так как расход потока бурового раствора 18 через каждую из нагнетательной и обводной линий 26, 72 позволяет определить, какое влияние эти потоки оказывают на давление в стволе скважины, в этих линиях, как показано на фиг. 1, устанавливают расходомеры 64, 66. Однако расход потока, протекающего через нагнетательную линию 26, можно определять при использовании только лишь расходомеров 62, 64, а расход потока, протекающего через обводную линию 72, можно определять при использовании только лишь расходомеров 62, 66. Таким образом, следует понимать, что система 10 может содержать не все датчики, показанные на фиг. 1 и описанные в данном документе. Вместо них указанная система может содержать дополнительные датчики, датчики в различных сочетаниях и/или датчики разных типов и т.д.
В примере, показанном на фиг. 1, для заполнения нагнетательной линии 26 и бурильной колонны 16 по окончании наращивания бурильной колонны и для выравнивания давления между этой нагнетательной линией и линиями 30, 73 возврата бурового раствора перед открытием устройства 76 регулирования потока можно использовать перепускное устройство 78 регулирования потока и ограничитель 80 потока. В противном случае открытие устройства 76 регулирования потока до заполнения нагнетательной линии 26 и бурильной колонны 16 буровым раствором 18 и выравнивания давления между ними могло бы вызвать нежелательные колебания давления в кольцевом пространстве 20 (например, вследствие кратковременного прерывания потока через дроссельный манифольд 32 в процессе заполнения буровым раствором нагнетательной линии и бурильной колонны и т.д.).
При открытии перепускного устройства 78 регулирования потока в нагнетательной линии по окончании наращивания буровой раствор 18 может заполнить нагнетательную линию 26 и бурильную колонну 16, в то время как существенно большая часть бурового раствора продолжает протекать через обводную линию 72, чем обеспечивается непрерывное регулирование давления в кольцевом пространстве 20. После выравнивания давления в нагнетательной линии 26 и давления в линиях 30, 73 возврата бурового раствора и обводной линии 75 устройство 76 регулирования потока можно открыть, после чего можно закрыть устройство 74 регулирования потока для постепенного отведения большей части бурового раствора 18 из обводной линии 72 в нагнетательную линию 26.
Перед выполнением наращивания бурильной колонны 16 при подготовке к присоединению дополнительной бурильной трубы к бурильной колонне 16 для постепенного отведения потока бурового раствора 18 из нагнетательной линии 26 в обводную линию 72 можно осуществлять аналогичный процесс, только с обратной последовательностью действий. Таким образом, устройство 74 регулирования потока можно постепенно открывать для постепенного отведения большей части бурового раствора 18 из нагнетательной линии 26 в обводную линию 72, после чего устройство 76 регулирования потока можно закрыть.
Следует отметить, что устройство 78 регулирования потока и ограничитель 80 потока могут быть объединены в одном элементе (например, в устройстве регулирования потока со встроенным ограничителем потока). Устройства 76, 78 регулирования потока могут быть объединены в одном устройстве 81 регулирования потока (например, в одном дросселе, который можно постепенно открывать для постепенного заполнения нагнетательной линии 26 и бурильной колонны 16 и увеличения в них давления после выполнения наращивания бурильной колонны, после чего его можно открыть полностью для обеспечения максимального потока при бурении).
Однако ввиду того что стандартные буровые установки принято оборудовать устройством 76 регулирования потока, представляющим собой клапан в нагнетательном манифольде 70 (причем использование такого клапана в нагнетательной линии широко распространено в практике бурения), предпочтительно применение устройств 76, 78 регулирования потока с независимым управлением. Дальше по тексту авторы периодически относят устройства 76, 78 регулирования потока к одному устройству 81 регулирования потока, однако следует понимать, что устройство 81 регулирования потока может содержать отдельные устройства 76, 78 регулирования потока.
На фиг. 2 показан другой вариант исполнения. В этом примере устройство 78 регулирования потока представлено в виде дросселя, а ограничитель 80 потока не используют. Устройство 78 регулирования потока, показанное на фиг. 2, обеспечивает более точное управление потоком бурового раствора 18, поступающим в нагнетательную линию 26 и бурильную колонну 16 после соединения бурильной трубы.
Предпочтительно, что каждым устройством 74, 76, 78 регулирования потока и каждым дросселем 34 можно управлять удаленно и автоматически для поддержания требуемого давления на забое путем поддержания требуемого давления в кольцевом пространстве на поверхности или у поверхности. Однако в соответствии с принципами изобретения любыми из устройств 74, 76, 78 регулирования потока или другими устройствами регулирования потока, а также любыми из дросселей 34 или другими дросселями можно управлять вручную.
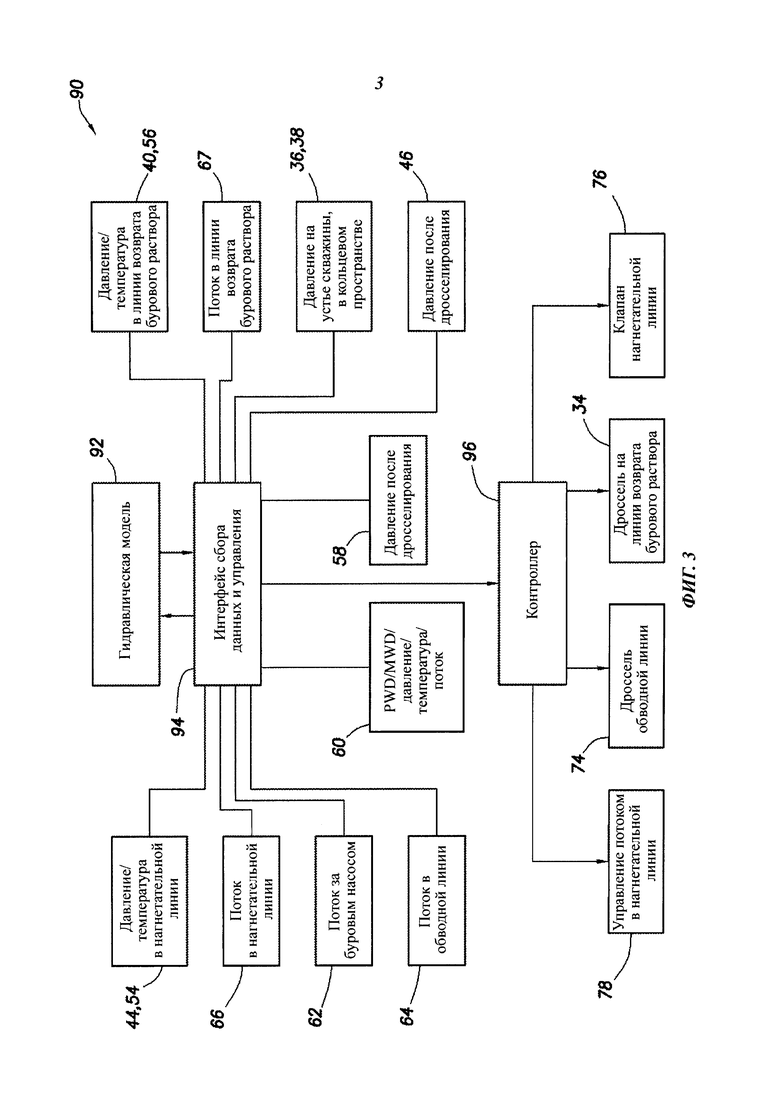
На фиг. 3 показан пример системы 90 управления давлением и потоком, которую можно использовать вместе с системой 10 и соответствующими способами, проиллюстрированными на фиг. 1 и 2. Предпочтительно, система 90 управления является полностью автоматической, хотя может требовать некоторого вмешательства оператора, например, для обеспечения защиты от неправильной эксплуатации, для запуска определенных программ, для обновления параметров и т.п.
Система 90 управления содержит гидравлическую модель 92, интерфейс 94 сбора данных и управления и контроллер 96 (такой как программируемый логический контроллер (ПЛК), соответствующим образом запрограммированный компьютер и т.п.). Хотя на фиг. 3 эти элементы 92, 94, 96 показаны отдельными, любой из них или все они могут быть объединены в единый элемент, или функции этих элементов могут быть распределены по дополнительным элементам, могут быть использованы дополнительные элементы и/или функции и т.д.
Гидравлическую модель 92 используют в системе 90 управления для определения требуемого давления в кольцевом пространстве на поверхности или у поверхности с целью получения требуемого давления на забое. Для этого в гидравлической модели 92 используют данные о геометрических параметрах скважины, о свойствах текучей среды, о соседних скважинах (например, геотермический градиент и градиент пластового давления, и т.п.), а также информацию, получаемую от датчиков в режиме реального времени через интерфейс 94 сбора данных и управления.
Таким образом, между гидравлической моделью 92 и интерфейсом 94 сбора данных и управления осуществляют непрерывную двунаправленную передачу данных. Важно понимать, что интерфейс 94 сбора данных и управления поддерживает, по существу, непрерывный поток данных, поступающих в режиме реального времени от датчиков 44, 54, 66, 62, 64, 60, 58, 46, 36, 38, 40, 56, 67 в гидравлическую модель 92, для предоставления ей необходимой информации с целью учета изменившихся условий и обновления требуемого давления в кольцевом пространстве, при этом указанная гидравлическая модель, по существу, непрерывно передает в указанный интерфейс сбора данных и управления значения для требуемого давления в кольцевом пространстве.
Гидравлическая модель, подходящая для использования в качестве гидравлической модели 92 в системе 90 управления, поставляется на рынок компанией Halliburton Energy Services, Inc. (г. Хьюстон, шт. Техас, США) под товарным знаком REAL TIME HYDRAULICS™. Другая подходящая гидравлическая модель распространяется под товарным знаком IRIS™, и еще одна гидравлическая модель поставляется на рынок компанией SINTEF (г. Тронхейм, Норвегия). В соответствии с принципами настоящего изобретения в системе 90 управления могут быть использованы любые подходящие гидравлические модели.
Интерфейсы сбора данных и управления, подходящие для использования в качестве интерфейса 94 сбора данных и управления в системе 90 управления, поставляются на рынок компанией Halliburton Energy Services, Inc. под товарными знаками SENTRY™ и INSITE™. В соответствии с принципами настоящего изобретения в системе 90 управления могут быть использованы любые подходящие интерфейсы сбора данных и управления.
Контроллер 96 поддерживает требуемое заданное значение давления в кольцевом пространстве посредством управления дросселем 34 возврата бурового раствора. Когда данные об обновленном значении требуемого давления в кольцевом пространстве поступают от интерфейса 94 сбора данных и управления в контроллер 96, этот контроллер использует требуемое давление в кольцевом пространстве в качестве заданного значения и управляет работой дросселя 34 (например, увеличивая или уменьшая при необходимости сопротивление потоку через дроссель) таким образом, чтобы давление в кольцевом пространстве поддерживалось в соответствии с заданным значением. Дроссель 34 можно прикрывать для увеличения сопротивления потоку или открывать больше для уменьшения сопротивления потоку.
Поддержание заданного давления обеспечивают путем его сравнения с измеренным давлением в кольцевом пространстве (например, при помощи любого из датчиков 36, 38, 40), с уменьшением сопротивления потоку, протекающему через дроссель 34, если измеренное давление выше заданного давления, и увеличения сопротивления потоку, протекающему через дроссель 34, если измеренное давление ниже заданного давления. Безусловно, при равенстве заданного и измеренного давлений управляющее воздействие на дроссель 34 не требуется. Предпочтительно, этот процесс является автоматическим и не требует вмешательства человека, однако при необходимости вмешательство может быть осуществлено.
Контроллер 96 также можно использовать для управления устройствами 76, 78 регулирования потока нагнетательной линии и устройством 74 регулирования потока обводной линии. Таким образом, контроллер 96 можно использовать для автоматизации процессов отведения потока бурового раствора 18 из нагнетательной линии 26 в обводную линию 72 перед выполнением наращивания бурильной колонны 16 и последующего отведения потока бурового раствора 18 из обводной линии 72 в нагнетательную линию 26 по окончании соединительных операций с возобновлением нормальной циркуляции бурового раствора 18 для выполнения бурения. В этих автоматических процессах может не требоваться вмешательство человека, однако при необходимости такое вмешательство может быть осуществлено, например для последовательного запуска каждого процесса, ручного управления определенным компонентом системы и т.п.
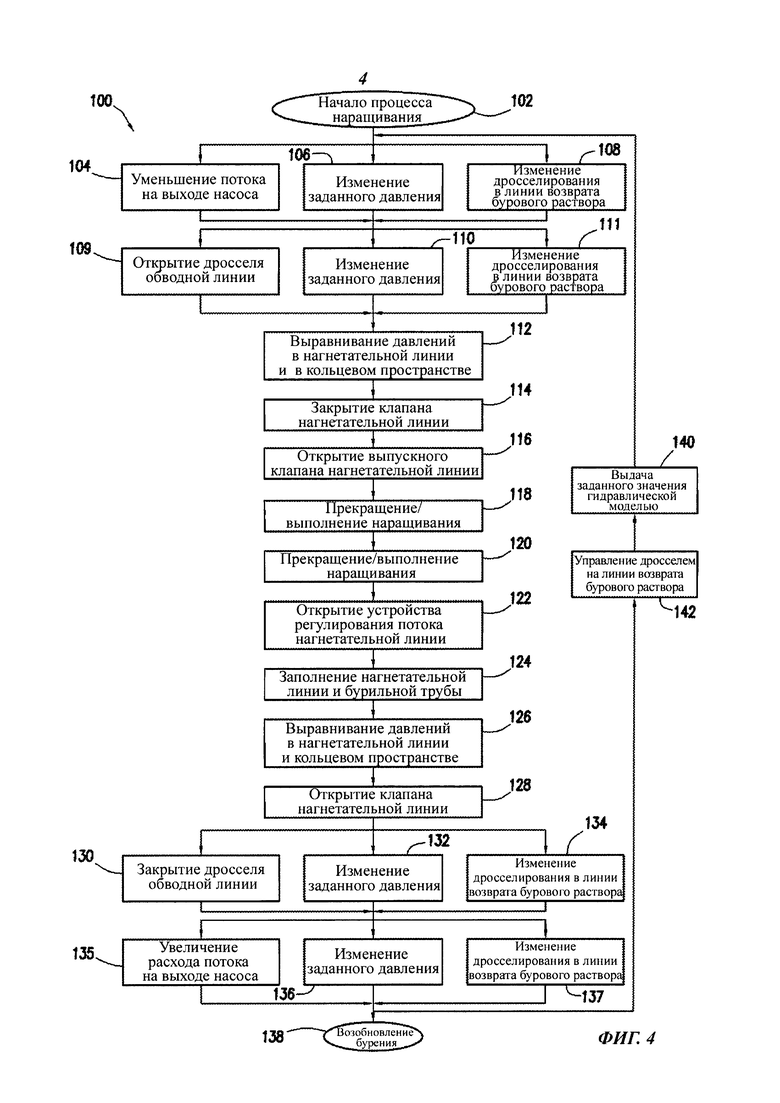
На фиг. 4 показана блок-схема алгоритма способа 100 выполнения наращивания в бурильной колонне в системе 10 бурения скважины с использованием системы 90 управления. Безусловно, в соответствии с принципами настоящего изобретения способ 100 может быть применен в других системах бурения скважин с использованием других систем управления.
Процесс выполнения наращивания в бурильной колонне начинается на шаге 102. Наращивание в бурильной колонне обычно выполняют когда ствола 12 скважины пробурен на достаточную глубину, так что для продолжения бурения требуется увеличить длину бурильной колонны 16.
На шаге 104 можно уменьшить расход потока на выходе насоса 68. Уменьшение расхода потока бурового раствора 18 на выходе насоса 68 позволяет перевести дроссель 34 в режим его наиболее эффективной работы (обычно в диапазоне приблизительно 30-70% от максимальной проходного сечения потока жидкости) в процессе выполнения соединительной операции. Однако данный шаг необязателен, если дроссель 34 иным образом остается работать в наиболее эффективном режиме.
На шаге 106 при уменьшении потока бурового раствора 18 изменяют заданное давление (например, для компенсации уменьшенного трения текучей среды в кольцевом пространстве 20 между буровым долотом 14 и клапаном 28 отводящей линии, что приводит к уменьшению эквивалентной плотности циркуляции). Интерфейс 94 сбора данных и управления получает данные (например, от датчиков 58, 60, 62, 66, 67) о том, что расход потока бурового раствора 18 уменьшился, в результате чего гидравлическая модель 92 определяет, что для поддержания требуемого давления на забое необходимо изменить давление в кольцевом пространстве, и контроллер 96 использует изменившееся требуемое давление в кольцевом пространстве в качестве заданного значения для выдачи управляющего воздействия на дроссель 34.
При операции бурения на репрессии с небольшой разницей давлений заданное давление имеет тенденцию к увеличению из-за уменьшения эквивалентной плотности циркуляции, что в свою очередь вызовет увеличение сопротивления потоку, протекающему через дроссель 34. Однако в некоторых случаях (например, при бурении на депрессии, при котором для уменьшения давления на забое в буровой раствор 18 добавляют газ или иной легкий флюид) заданное давление может уменьшиться (например, вследствие поступления в скважину жидкости).
На шаге 108 изменяют сопротивление потоку бурового раствора 18, протекающего через дроссель 34, вследствие изменения требуемого давления в кольцевом пространстве, произошедшего на шаге 106. Как сказано выше, для достижения изменившегося заданного давления контроллер 96 выдает управляющее воздействие на дроссель 34, изменяя при этом сопротивление потоку через этот дроссель. Как сказано выше, заданное давление можно увеличивать или уменьшать.
Шаги 104, 106 и 108, показанные в блок-схеме на фиг. 4, выполняют одновременно, так как заданное давление и дросселирование возврата бурового раствора могут изменяться непрерывно, например, как сказано выше, вследствие взаимовлияния, вследствие изменения расхода потока бурового раствора на выходе насоса и вследствие прочих условий.
На шаге 109 постепенно открывают устройство 74 регулирования потока в обводной линии, в результате чего отводят постепенно увеличивающуюся часть бурового раствора 18 через обводную линию 72, а не через нагнетательную линию 26.
На шаге 110 при уменьшении потока бурового раствора 18 через бурильную колонну 16, изменяют заданное давление (например, для компенсации уменьшенного трения текучей среды в кольцевом пространстве 20 между буровым долотом 14 и клапаном 28 отводящей линии, что приводит к уменьшению эквивалентной плотности циркуляции). Поток через бурильную колонну 16 существенно уменьшается, когда устройство 74 регулирования потока открыто, так как обводная линия 72 оказывает меньшее сопротивление этому потоку, и, следовательно, буровой раствор 18 протекает через обводную линию 72. Интерфейс 94 сбора данных и управления получает показания (например, от датчиков 58, 60, 62, 66, 67) о том, что расход потока бурового раствора 18 через бурильную трубу 16 и кольцевое пространство 20 уменьшился, в результате чего гидравлическая модель 92 определяет, что для поддержания требуемого давления на забое необходимо изменить давление в кольцевом пространстве, и контроллер 96 использует изменившееся требуемое давление в кольцевом пространстве в качестве заданного значения для выдачи управляющего воздействия на дроссель 34.
При бурении на репрессии с небольшой разницей давлений заданное давление имеет тенденцию к увеличению из-за уменьшения эквивалентной плотности циркуляции, что в свою очередь вызовет увеличение сопротивления потоку, протекающему через дроссель 34. Однако в некоторых случаях (например, при бурении на депрессии, при котором для уменьшения давления на забое в буровой раствор 18 добавляют газ или иную легкую текучую среду) заданное давление может уменьшиться (например, вследствие поступления в скважину жидкости).
На шаге 111 сопротивление потоку бурового раствора 18 через дроссель 34 изменяют вследствие изменения требуемого давления в кольцевом пространстве, выполненного на шаге 110. Как сказано выше, для получения измененного заданного давления контроллер 96 выдает управляющее воздействие на дроссель 34, изменяя при этом сопротивление потоку через дроссель. Как сказано выше, заданное давление можно увеличивать или уменьшать.
Шаги 109, 110 и 111, показанные в блок-схеме на фиг. 4, выполняют одновременно, так как заданное давление и дросселирование бурового раствора могут изменяться непрерывно, например, как сказано выше, вследствие взаимовлияния, вследствие открытия устройства 74 регулирования потока в обводной линии и вследствие прочих условий. Однако в других примерах эти шаги могут осуществляться не одновременно.
На шаге 112 выравнивают давление в нагнетательной линии 26 и давление в кольцевом пространстве 20 на поверхности или у поверхности (например, регистрируемые датчиками 36, 38, 40, 44). На этой стадии устройство 74 регулирования потока в обводной линии должно быть полностью открыто и, по существу, весь буровой раствор 18 должен протекать через обводную линию 72, 75, а не через нагнетательную линию 26 (так как обводная линия является каналом с меньшим сопротивлением). Статическое давление в нагнетательной линии 26 должно, по существу, сравняться с давлением в линиях 30, 73, 75 перед дроссельным манифольдом 32.
На шаге 114 закрывают устройство 81 регулирования потока в нагнетательной линии. Отдельное перепускное устройство 78 регулирования потока в нагнетательной линии должно быть уже закрыто, поэтому на шаге 114 закрывают только клапан 76.
На шаге 116 открывают выпускной клапан 82 нагнетательной линии (см. фиг. 10) для сброса давления и бурового раствора из нагнетательной линии 26 с целью подготовки разрыва соединения между ведущей трубой или верхним приводом и бурильной колонной 16. На этой стадии содержимое нагнетательной линии 26 выпускают в атмосферу.
На шаге 118 от бурильной колонны 16 отсоединяют ведущую трубу или верхний привод, к бурильной колонне присоединяют свечу бурильных труб и с верхней частью бурильной колонны соединяют ведущую трубу или верхний привод. Этот шаг осуществляют в соответствии с обычной технологией бурения с по меньшей мере одним исключением, состоящим в том, что в обычной технологии бурения при выполнении наращивания буровые насосы отключают, а в рамках способа 100 буровые насосы 68, предпочтительно, продолжают работать, но при этом закрывается клапан 76 нагнетательной линии и весь поток отводится в дроссельный манифольд 32 для управления давлением в кольцевом пространстве. Обратный клапан 21 блокирует восходящий поток через бурильную колонну 16 при выполнении наращивания с включенными буровыми насосами 68.
На шаге 120 закрывают выпускной клапан 82 нагнетательной линии. Таким образом, повторно изолируют нагнетательную линию 26 от атмосферы, но при этом нагнетательная линия и добавленная свеча бурильных труб фактически пусты (т.е. не заполнены буровым раствором 18), и давление внутри них перед выполнением наращивания равно давлению окружающей среды или отличается от него незначительно.
На шаге 122 открывают перепускное устройство 78 регулирования потока в нагнетательной линии сразу (при конфигурации с клапаном и устройством ограничения потока, показанной на фиг. 1) или постепенно (при конфигурации с дросселем, показанной на фиг. 2). Таким образом, на шаге 124 буровой раствор 18 может заполнить нагнетательную линию 26 и добавленную свечу бурильных труб.
В конечном итоге на шаге 126 выравнивают давление в нагнетательной линии 26 и давление в кольцевом пространстве 20 на поверхности или у поверхности. Однако на данной стадии, по существу, весь буровой раствор 18 все еще будет протекать через обводную линию 72. Статическое давление в нагнетательной линии 26 должно, по существу, выровнять давление в линиях 30, 73, 75 перед входом в дроссельный манифольд 32.
На шаге 128 открывают устройство 76 регулирования потока в нагнетательной линии для подготовки отведения потока бурового раствора 18 в нагнетательную линию 26 и, далее, в бурильную колонну 16. Затем закрывают перепускное устройство 78 регулирования потока в нагнетательной линии. Следует отметить, что благодаря предварительному заполнению нагнетательной линии 26 и бурильной колонны 16 и выравниванию давлений между нагнетательной линией и кольцевым пространством 20, действия на шаге открытия устройства 76 регулирования потока в нагнетательной линии не приводят к возникновению существенных нежелательных колебаний давления в кольцевом пространстве или линиях 30, 73 возврата бурового раствора. Фактически весь буровой раствор 18 продолжает протекать через обводную линию 72, а не через нагнетательную линию 26 даже при открытии устройства 76 регулирования потока в нагнетательной линии.
Будем рассматривать отдельные устройства 76, 78 регулирования потока в нагнетательной линии как одно устройство 81 регулирования потока в нагнетательной линии, тогда устройство 81 регулирования потока в нагнетательной линии постепенно открывают для медленного заполнения нагнетательной линии 26 и бурильной колонны 16, а затем открывают полностью, когда давления в нагнетательной линии и кольцевом пространстве 20, по существу, сравняются.
На шаге 130 постепенно закрывают устройство 74 регулирования потока в обводной линии, в результате чего отводят увеличивающуюся часть бурового раствора 18 через нагнетательную линию 26 и бурильную колонну 16, а не через обводную линию 72. На этом шаге начинают циркуляцию бурового раствора 18 через бурильную колонну 16 и ствол 12 скважины.
На шаге 132 при уменьшении потока бурового раствора 18 через бурильную колонну 16, изменяют заданное давление (например, для компенсации увеличенного трения текучей среды, что приводит к увеличению эквивалентной плотности циркуляции). Интерфейс 94 сбора данных и управления получает сведения (например, от датчиков 60, 64, 66, 67) о том, что расход потока бурового раствора 18 через ствол 12 скважины уменьшился, в результате чего гидравлическая модель 92 определяет, что для поддержания требуемого давления на забое необходимо изменить давление в кольцевом пространстве, и контроллер 96 использует изменившееся требуемое давление в кольцевом пространстве в качестве заданного значения для выдачи управляющего воздействия на дроссель 34. Как сказано выше при описании шагов 106 и 108, требуемое давление в кольцевом пространстве можно увеличивать или уменьшать.
На шаге 134 изменяют сопротивление потоку бурового раствора 18, протекающему через дроссель 34, вследствие изменения требуемого давления в кольцевом пространстве, выполненного на шаге 132. Как сказано выше, для получения измененного заданного давления контроллер 96 выдает управляющее воздействие на дроссель 34, изменяя при этом сопротивление потоку, протекающему через этот дроссель.
Шаги 130, 132 и 134, показанные в блок-схеме на фиг. 4, выполняют одновременно, так как заданное давление и дросселирование линии возврата бурового раствора могут изменяться непрерывно, например, как сказано выше, вследствие взаимовлияния, вследствие закрытия устройства 74 регулирования потока в обводной линии и вследствие прочих условий.
На шаге 135 для подготовки возобновления бурения ствола 12 скважины могут увеличить расход потока на выходе насоса 68. Это увеличение расхода потока позволяет перевести дроссель 34 в режим его наиболее эффективной работы (как на вышеописанном шаге 104), однако данный шаг необязателен, если дроссель 34 иным образом введен в режим его наиболее эффективной работы.
На шаге 136 при увеличении потока бурового раствора 18 изменяют заданное давление (например, для компенсации увеличенного трения текучей среды в кольцевом пространстве 20 между буровым долотом 14 и клапаном 28 отводящей линии, что приводит к увеличению эквивалентной плотности циркуляции). Интерфейс 94 сбора данных и управления получает данные (например, от датчиков 58, 60, 62, 66, 67) о том, что расход потока бурового раствора 18 увеличился, в результате чего гидравлическая модель 92 определяет, что для поддержания требуемого давления на забое необходимо изменить давление в кольцевом пространстве, и контроллер 96 использует изменившееся требуемое давление в кольцевом пространстве в качестве заданного значения для выдачи управляющего воздействия на дроссель 34.
При операции бурения на репрессии с небольшой разницей давлений заданное давление имеет тенденцию к уменьшению из-за увеличения эквивалентной плотности циркуляции, что в свою очередь вызовет уменьшение сопротивления потоку через дроссель 34.
На шаге 137 изменяют сопротивление потоку бурового раствора 18, протекающему через дроссель 34, вследствие изменения требуемого давления в кольцевом пространстве, произошедшего на шаге 136. Как сказано выше, для достижения изменившегося заданного давления контроллер 96 выдает управляющее воздействие на дроссель 34, изменяя при этом сопротивление потоку, протекающему через этот дроссель. Как сказано выше, заданное давление можно увеличивать или уменьшать.
Шаги 135, 136 и 137, показанные в блок-схеме на фиг. 4, выполняют одновременно, так как заданное давление и сопротивление потоку в обратной линии возврата бурового раствора, регулируемое дросселем, могут изменяться непрерывно, например, как сказано выше, вследствие взаимовлияния, вследствие изменения расхода потока бурового раствора на выходе насоса и вследствие прочих условий.
На шаге 138 возобновляют бурение ствола 12 скважины. При необходимости проведения следующего наращивания в бурильной колонне 16 шаги 102-138 можно повторить.
В блок-схеме алгоритма способа 100 выполнения наращивания, показанного на фиг. 4, приведены шаги 140 и 142, указывающие на то, что в рамках этого способа система 90 продолжает работать. Другими словами, интерфейс 94 сбора данных и управления продолжает получать данные от датчиков 36, 38, 40, 44, 46, 54, 56, 58, 62, 64, 66, 67 и передавать соответствующую информацию в гидравлическую модель 92. Гидравлическая модель 92 продолжает определять требуемое давление в кольцевом пространстве, соответствующее требуемому давлению на забое. Контроллер 96 продолжает использовать требуемое давление в кольцевом пространстве в качестве заданного значения для управления действием дросселя 34.
Понятно, что выполнение всех или большинства вышеописанных шагов может быть автоматизировано при помощи системы 90 управления. Например, для автоматического управления действием любых или всех устройств 34, 74, 76, 78, 81 регулирования потока при поступлении информации от интерфейса 94 сбора данных и управления можно использовать контроллер 96.
Предпочтительно, вмешательство человека можно использовать, чтобы уведомить систему 90 управления, когда требуется начать процесс наращивания (шаг 102), а затем уведомить, когда наращивание бурильной трубы (шаг 118) завершено, однако, по существу, все остальные шаги могут выполняться автоматически (например, при помощи соответствующим образом запрограммированных элементов программных средств системы 90 управления). Тем не менее, представляется, что все шаги 102-142 могут выполняться автоматически, например, при использовании соответствующей буровой установки с верхним приводом (или любой другой буровой установки, рассчитанной на выполнение наращиваний бурильной колонны без вмешательства человека).
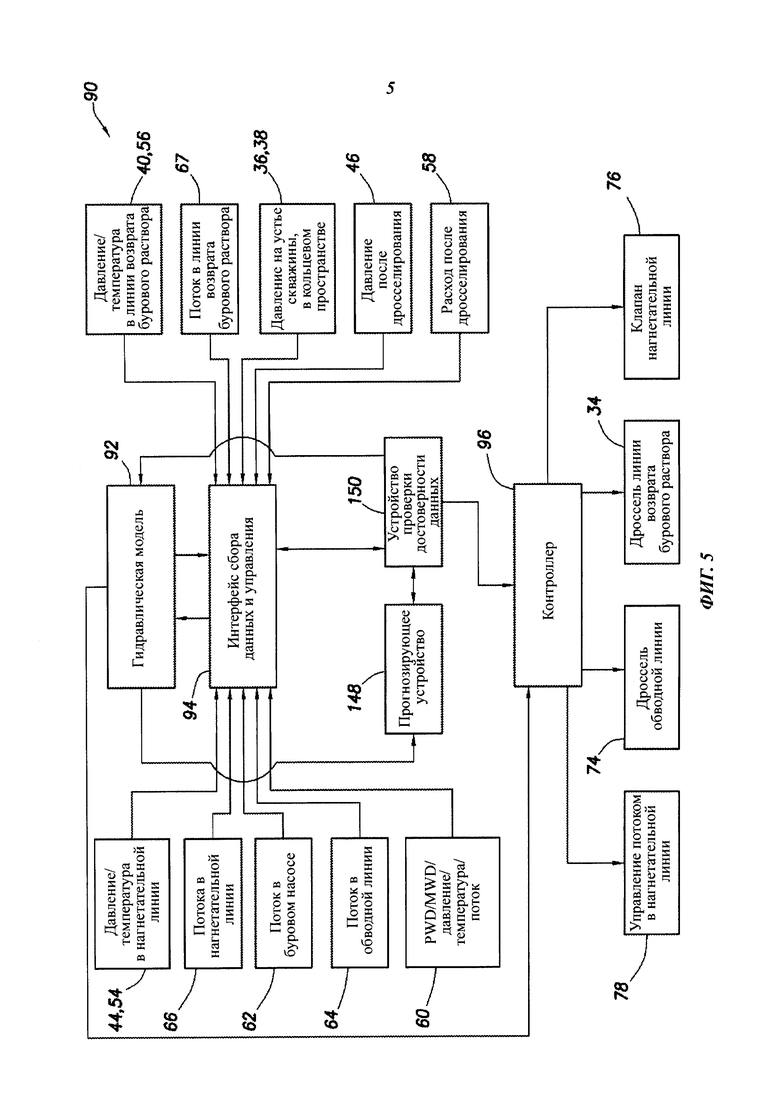
На фиг. 5 показан пример другой конфигурации системы 90 управления. Система 90 управления, показанная на фиг. 5, во многом аналогична системе управления, показанной на фиг. 3, и отличается от нее, по меньшей мере, тем, что в ее состав входят прогнозирующее устройство 148 и устройство 150 проверки достоверности данных.
Предпочтительно, что прогнозирующее устройство 148 содержит одну или несколько моделей нейронных сетей, предназначенных для прогнозирования различных параметров скважины. Эти параметры могут содержать выходные величины датчиков 36, 38, 40, 44, 46, 54, 56, 58, 60, 62, 64, 66, 67, значение заданного давления в кольцевом пространстве на выходе гидравлической модели 92, состояния устройств 34, 74, 76, 78 регулирования потока, плотность бурового раствора 18 и др. Прогнозирующее устройство 148 может прогнозировать любой параметр скважины и любое сочетание параметров скважины.
Предпочтительно, что прогнозирующее устройство 148 «обучают» путем ввода в него текущих и предшествующих фактических значений параметров. Члены или «весовые коэффициенты» в прогнозирующем устройстве 148 могут настраиваться на основе производных выходных сигналов прогнозирующего устройства по каждому из этих звеньев.
Прогнозирующее устройство 148 можно обучать путем ввода в него данных, полученных при бурении, при выполнении наращивания в бурильной колонне 16 и/или при выполнении других этапов буровых работ. Прогнозирующее устройство 148 можно обучать путем ввода в него данных, полученных при бурении по меньшей мере одной предшествующей скважины.
Это обучение может содержать ввод в прогнозирующее устройство 148 данных о предшествующих ошибках в прогнозах, сделанных прогнозирующим устройством. Прогнозирующее устройство 148 можно обучать путем ввода данных, созданных при компьютерном имитационном моделировании системы 10 бурения скважины (содержащей буровую установку, скважину, задействованное оборудование и т.д.).
После обучения прогнозирующее устройство 148 может точно прогнозировать или оценивать, какое значение должен иметь тот или иной параметр в настоящий момент и/или в будущем. Спрогнозированные значения параметров можно передавать в устройство 150 проверки достоверности данных для использования в выполняемых им процессах проверки достоверности данных.
Прогнозирующее устройство 148 не обязательно содержит одну или несколько моделей нейронных сетей. К другим типам прогнозирующего устройства, которые могут быть использованы, относятся следующие: устройство с искусственным интеллектом, адаптивная модель, нелинейная функция, обобщенная для реальных систем, генетический алгоритм, модель линейной системы и/или модель нелинейной системы, сочетания вышеперечисленного и др.
Прогнозирующее устройство 148 может осуществлять регрессивный анализ, нелинейную регрессию и использовать гранулярные вычисления. Выход первой основной модели может быть соединен с входом прогнозирующего устройства 148 и/или прогнозирующее устройство 148 может содержать первую основную модель.
Прогнозирующее устройство 148 получает фактические значения параметров от устройства 150 проверки достоверности данных, которое может содержать один или несколько цифровых программируемых процессоров, запоминающее устройство и др. Устройство 150 проверки достоверности данных использует различные алгоритмы предварительного программирования для определения достоверности результатов измерения датчиками, состояний устройств регулирования потока и проч., получаемых от интерфейса 94 сбора данных и управления.
Например, если получаемое фактическое значение параметра выходит за пределы допустимого диапазона, недоступно (например, вследствие отказа датчика) или отличается от спрогнозированного значения этого параметра (например, вследствие неправильной работы датчика) на значение, превышающее предельно допустимое, устройство 150 проверки достоверности данных может пометить это значение параметра как «недействительное». Недействительные значения параметров можно не использовать при обучении прогнозирующего устройства 148 или при определении требуемого заданного давления в кольцевом пространстве гидравлической моделью. Действительные значения параметров можно использовать для обучения прогнозирующего устройства 148, для обновления гидравлической модели 92, для внесения информации в базу данных интерфейса 94 сбора данных и управления, а также можно передавать в контроллер 96 для формирования управляющего воздействия на устройства 34, 74, 76, 78 регулирования потока.
Требуемое заданное значение давления в кольцевом пространстве можно передавать из гидравлической модели 92 в каждый из компонентов - интерфейс 94 сбора данных и управления, прогнозирующее устройство 148 и контроллер 96. Требуемое заданное значение давления в кольцевом пространстве поступает от гидравлической модели в интерфейс сбора данных и управления для внесения этого значения в базу данных и отправки в устройство 150 проверки достоверности данных с другими фактическими значениями параметров.
Требуемое заданное значение давления в кольцевом пространстве передают от гидравлической модели 92 в прогнозирующее устройство 148 для использования при прогнозировании будущих значений заданного давления в кольцевом пространстве. Однако в других примерах прогнозирующее устройство 148 может получать требуемое заданное значение давления в кольцевом пространстве (вместе с другими фактическими значениями параметров) от устройства 150 проверки достоверности данных.
Требуемое заданное значение давления в кольцевом пространстве передают от гидравлической модели 92 в контроллер 96 для использования в случае неисправности интерфейса 94 сбора данных и управления или устройства 150 проверки достоверности данных или в случае недоступности выходных сигналов этих устройств по иной причине. При этом контроллер 96 может продолжить управление действием различных устройств 34, 74, 76, 78 регулирования потока для поддержания/достижения требуемого давления в кольцевом пространстве 20 у поверхности.
Прогнозирующее устройство 148 обучают в реальном времени, и оно может прогнозировать текущие значения результатов измерений одного или нескольких датчиков на основе выходных сигналов по меньшей мере некоторых из остальных датчиков. Таким образом, если выходной сигнал датчика становится недоступен, прогнозирующее устройство 148 может передавать в устройство 150 проверки достоверности данных недостающие значения, относящиеся к результатам измерения этого датчика, по меньшей мере, в течение некоторого времени, пока выходной сигнал этого датчика снова не станет доступным.
Например, если во время вышеописанного наращивания бурильной колонны откажет один из расходомеров 62, 64, 66, или его выходной сигнал окажется недоступным или недействительным по иным причинам, то устройство 150 проверки достоверности данных может заменить фактический (или несуществующий) выходной сигнал этого расходомера на прогнозируемый выходной сигнал этого расходомера. Предполагается, что на практике можно использовать только один или два расходомера 62, 64, 66. Таким образом, если устройство 150 проверки достоверности данных перестает получать действительный выходной сигнал от одного из этих расходомеров, то выходной сигнал, соответствующий определенному соотношению частей бурового раствора 18, протекающих через нагнетательную линию 26 и обводную линию 72, может выдавать прогнозирующее устройство 148. Понятно, что результаты измерения соотношения частей бурового раствора 18, протекающих через нагнетательную линию 26 и обводную линию 72, весьма полезны, например, при расчете гидравлической моделью 92 эквивалентной плотности циркуляции и/или потерь давления на трение в процессе наращивания бурильной колонне или в ходе других процессов (таких как отведение потока в обход бурильной колонны 16 телеметрическими способами), которые могут влиять на эквивалентную плотность циркуляции и/или потери давления на трение.
Проверенные на достоверность значения параметров передают от устройства 150 проверки достоверности данных в гидравлическую модель 92 и в контроллер 96. Гидравлическая модель 92 использует эти значения и, возможно, другие потоки данных для расчета текущего давления на забое в целевой точке (например, на забое ствола 12 скважины, в проблемной зоне, на башмаке обсадной колонны и др.) и требуемого давления в кольцевом пространстве 20 у поверхности, необходимого для достижения требуемого давления на забое.
Устройство 150 проверки достоверности данных запрограммировано на анализ попадания отдельных значений параметров, получаемых от интерфейса 94 сбора данных и управления, в предварительно заданный диапазон ожидаемых значений. Если устройство 150 проверки достоверности данных регистрирует, что одно или несколько значений параметров, получаемых от интерфейса 94 сбора данных и управления, является недействительным, оно может отправить сигнал в прогнозирующее устройство 148 о прерывании обучения модели нейронной сети по неисправному датчику и о прерывании обучения остальных моделей нейронной сети, использующих при обучении значения параметров этого неисправного датчика.
Хотя прогнозирующее устройство 148 может прервать обучение одной или нескольких моделей нейронной сети при отказе датчика, он может продолжить создавать прогнозируемые выходные сигналы неисправного датчика или неисправных датчиков на основе поступающих в этот прогнозирующее устройство данных других, работающих, датчиков. В случае выявления неисправного датчика устройство 150 проверки достоверности данных может заменить прогнозируемые значения параметров датчика, поступающие от прогнозирующего устройства 148 в контроллер 96 и гидравлическую модель 92. Кроме того, когда устройство 150 проверки достоверности данных определяет, что тот или иной датчик неисправен или его выходной сигнал недоступен, оно может включать сигнализацию и/или выдавать предупреждение об отказе этого датчика, чтобы оператор мог предпринять корректирующие действия.
Прогнозирующее устройство 148, предпочтительно, также может обучать модель нейронной сети, представляющую выходной сигнал гидравлической модели 92. Прогнозируемое значение требуемого заданного давления в кольцевом пространстве передают в устройство 150 проверки достоверности данных. В случае нарушения процесса создания правильных значений гидравлической моделью 92 или в случае недоступности гидравлической модели 92 устройство 150 проверки достоверности данных может заменить прогнозируемое значение заданного требуемого давления в кольцевом пространстве, поступающее в контроллер 96.
На фиг. 6 показан пример прогнозирующего устройства 148 отдельно от системы 90 управления. На этом чертеже показано, что прогнозирующее устройство 148 содержит модель 152 нейронной сети, выдающую прогнозируемые текущие (yn) и/или будущие (yn+1, yn+2, …) значения параметра y.
Другие текущие и/или предшествующие значения параметров a, b, c, … вводят в модель 152 нейронной сети для ее обучения и прогнозирования значений параметра y и т.д. Параметры a, b, c, y, … могут представлять собой вышеуказанные результаты измерения любого датчика, состояния устройств регулирования потока, физические параметры (например, массу бурового раствора, глубину скважины и т.п.) и др.
Текущие и/или предшествующие фактические и/или прогнозируемые значения параметра y также можно вводить в модель 152 нейронной сети. Разности между фактическими и прогнозируемыми значениями параметра y могут быть полезны для обучения модели 152 нейронной сети (например, для минимизации этих разностей).
В процессе обучения различным входным параметрам присваивают весовые коэффициенты, автоматически регулируемые для минимизации разностей между фактическими и прогнозируемыми значениями параметров. Если при обучении основная структура модели 152 нейронной сети и входные параметры выбраны правильно, то через соответствующее (и, предпочтительно, короткое) время обучения разность между фактическими значениями параметров и прогнозируемыми значениями параметров должна стать минимальной.
Может быть полезным, чтобы одна модель 152 нейронной сети выдавала прогнозируемые значения только для одного параметра. Для прогнозирования значений нескольких параметров можно использовать, соответственно, несколько моделей 152 нейронной сети. Таким образом, отказ одной из модели 152 нейронной сети не влияет на функционирование остальных.
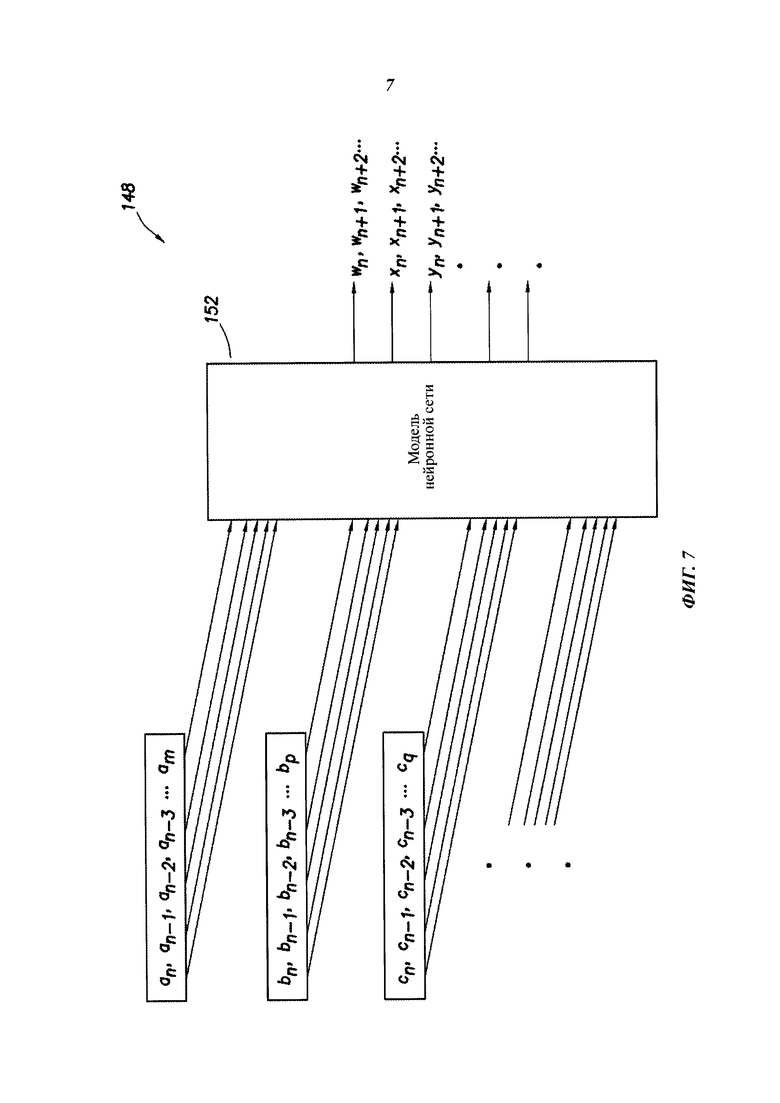
Однако из соображений эффективного использования ресурсов для прогнозирования значений множества параметров можно использовать одну модель 152 нейронной сети. Пример такой конфигурации показан на фиг. 7, где модель 152 нейронной сети выдает прогнозируемые значения множества параметров w, x, y…
При использовании нескольких моделей нейронной сети они не обязательно должны иметь общие входы. В примере, показанном на фиг. 8, рассмотрено использование двух моделей 152, 154 нейронной сети. Некоторые из входных параметров моделей 152, 154 нейронной сети являются для них общими, при этом некоторые значения входных параметров модели 152 не вводят в модель 154, а в модель 154 вводят значения параметров, которые не вводят в модель 152.
Если модель 152 нейронной сети выдает прогнозируемые значения только для одного параметра, связанного с конкретным датчиком (или с другим источником фактического значения параметра), то в случае отказа этого датчика (или другого источника фактического значения параметра) для передачи значений параметра можно использовать модель, прогнозирующую его выходной сигнал, без прерывания работы. Поскольку в этом случае модель 152 нейронной сети используют только для прогнозирования значений одного параметра, в случае отказа датчика (или другого источника фактического значения параметра) обучение модели нейронной сети можно просто остановить, не оказывая при этом влияния на функционирование остальных моделей нейронной сети, используемых для прогнозирования значений других параметров.
На фиг. 9 показан пример схемы еще одной конфигурации системы 10 бурения скважины. В большинстве аспектов конфигурация, показанная на фиг. 9, похожа на конфигурацию, показанную на фиг. 2.
Отличие конфигурации, показанной на фиг. 9, состоит в том, что устройство 78 регулирования потока и ограничитель 80 потока вместе с устройством 74 регулирования потока и расходомером 64 входят в состав отдельного блока 156 отведения потока. Для удобства транспортировки и установки на площадке буровой вышки блок 156 отведения потока может поставляться в виде «передвижного модуля». Дроссельный манифольд 32, датчик 46 давления и расходомер 58 также могут поставляться в виде отдельного блока.
Следует отметить, что расходомеры 66, 67 необязательны для использования. Например, сведения о потоке, протекающем через нагнетательную линию 26, можно получать из выходных сигналов расходомеров 62, 64, а сведения о потоке, протекающем через обратную линию 73, можно получать из выходных сигналов расходомеров 58, 64.
На фиг. 10 показан пример схемы еще одной конфигурации системы 10 бурения скважины. В этой конфигурации устройство 76 регулирования потока подсоединено на входе распределителя 70 нагнетательной линии буровой установки. Такое расположение элементов имеет определенные преимущества: например, не требуется вносить изменения в конструкцию распределителя 70 нагнетательной линии буровой установки или линии, находящейся между этим распределителем и ведущей трубой, выпускной клапан 82 нагнетательной трубы буровой установки может быть использован для выпуска содержимого нагнетательной линии 26, как при обычных буровых операциях (не требуется изменять порядок действий буровой бригады, не требуется вводить отдельную спускную линию от блока 156 отведения потока) и т.д.
Устройство 76 регулирования потока можно подсоединять между буровым насосом 68 и распределителем 70 нагнетательной линии при помощи, например быстроразъемных соединителей 84 (таких как быстроразъемное соединение с накидной крыльчатой гайкой и т.п.). Это позволит упростить подготовку устройства 76 регулирования потока к подсоединению к различным нагнетательным линиям буровой установки.
Вместо стандартного клапана нагнетательной линии в распределителе 70 нагнетательной линии буровой установки для управления потоком, протекающим через нагнетательную линию 26, можно использовать специально подготовленное полностью автоматическое устройство 76 регулирования потока (например, управляемое контроллером 96). Устройство 81 управления потоком может иметь конструкцию, полностью подходящую для раскрытого в настоящем документе применения (например, для управления потоком, протекающим через нагнетательную линию 26, и отведения бурового раствора 18 из нагнетательной линии в обводную линию 72 и обратно для управления давлением в кольцевом пространстве 20 и т.п.), а не для решения стандартных буровых задач.
В примере, проиллюстрированном на фиг. 10, показано, что для отведения потока бурового раствора 18 из нагнетательной линии 26 в линию 30 возврата бурового раствора, с целью передачи сигналов, данных, команд и т.п. в скважинные устройства (такие как изображенная на фиг. 1 компоновка низа бурильной колонны с датчиком 60, другое оборудование, в том числе забойные двигатели, отклоняющие устройства, навигационные устройства и др.) дополнительно можно использовать клапан с дистанционным управлением или другое устройство 160 регулирования потока. Устройством 160 управляет телеметрический контроллер 162, который может кодировать информацию в виде отведений потока, регистрируемых скважинными приборами (например, определенное уменьшение расхода потока, протекающего через то или иное скважинное устройство, будет следствием соответствующего отведения потока устройством 160 из нагнетательной линии 26 в линию 30 возврата бурового раствора).
Подходящий телеметрический контроллер и подходящее устройство регулирования с дистанционным управлением поставляются на рынок компанией Halliburton Energy Services, Inc. под товарным знаком GEO-SPAN™. Телеметрический контроллер 162 может быть подсоединен к системе INSITE™ или к другому интерфейсу сбора данных и управления системы 90 управления. При этом в соответствии с принципами настоящего изобретения можно применять телеметрические контроллеры и устройства регулирования потока других типов.
В способе управления давлением в скважине, подробнее раскрытом ниже, требуемое заданное давление в кольцевом пространстве регулируют при поступлении команды на отведение потока из нагнетательной линии 26 в линию 30 возврата бурового раствора. Эту команду можно передавать на шаге 109 вышеописанного способа 100 выполнения соединительной операции. В другом примере эту команду можно передавать в устройство 160 посредством телеметрического контроллера 162 с целью передачи соответствующего телеметрического сигнала в скважинное устройство. В других примерах поток бурового раствора 18 можно отводить из нагнетательной линии 26 и бурильной колонны 16 не для выполнения соединительной операции в этой бурильной колонне или передачи сигналов, а с другой целью.
Отведение потока из бурильной колонны 16 будет сопровождаться уменьшением трения текучей среды, что приведет к уменьшению давления в стволе 12 скважины. В случаях, когда момент начала отведения потока известен (например, отведение потока запускают по соответствующей команде), предпочтительно, чтобы также был запущен процесс изменения заданного давления в кольцевом пространстве для уменьшения колебаний давления в скважине, вызванных отведением потока.
Этот процесс не имеет отношения к изменению заданного давления в кольцевом пространстве при обнаружении изменения давления на забое, при обнаружении изменения потока у поверхности и т.п. Напротив, изменение заданного давления в кольцевом пространстве предпочтительно осуществляют непосредственно в результате поступления команды на изменение расхода потока, протекающего через бурильную колонну 16.
Таким образом, фактическое изменение (фактические изменения) расхода потока или давления и др. не обязаны происходить, не обязаны регистрироваться датчиками и сведения об этих изменениях не обязаны передаваться в систему 90 управления для анализа на предмет необходимости изменения заданного давления в кольцевом пространстве. Напротив, заданное давление в кольцевом пространстве можно изменять мгновенно, предпочтительно без существенного изменения давления на забое.
На практике обычно известен расход потока бурового раствора 18, отводимого из бурильной колонны 16 (этот расход потока также можно измерить посредством расходомера 164 или вычесть значение этого расхода из результатов измерений других расходомеров 58, 60, 66 и др.), а общий расход потока бурового раствора будет известен непосредственно перед поступлением команды на изменение расхода потока, протекающего через бурильную колонну.
В этих случаях можно рассчитать ожидаемое уменьшение давления при уменьшении расхода потока, протекающего через бурильную колонну 16 и кольцевое пространство 20, и можно соответствующим образом отрегулировать заданное давление в кольцевом пространстве (например, увеличить), чтобы в начальной стадии отведения потока давление на забое осталось фактически неизменным. Безусловно, если расход потока, протекающего через бурильную колонну 16, наоборот, увеличится, то может быть рассчитано ожидаемое увеличение давления при увеличении расхода потока, и может быть соответствующим образом отрегулировано заданное давление в кольцевом пространстве (например, уменьшено).
В базовом примере заданное давление в кольцевом пространстве обычно равно требуемому давлению на забое за вычетом гидростатического давления на забое и за вычетом потерь давления на трение. Потери давления на трение, являющиеся функцией расхода потока бурового раствора 18, протекающего через бурильную колонну 16 и кольцевое пространство 20, вычисляют посредством гидравлической модели 92. Таким образом, по ожидаемому изменению расхода потока бурового раствора можно судить об ожидаемом изменении потерь давления на трение, которое может быть просто рассчитано гидравлической моделью 92.
На фиг. 11 показана блок-схема примера алгоритма способа 170 управления давлением в скважине. В соответствии с принципами настоящего изобретения способ 170 можно использовать с любой из вышеописанных систем 10 бурения или с любыми другими системами бурения.
В примере, показанном на фиг. 11, колебания давления на забое, вызванные изменением расхода потока, протекающего через бурильную колонну 16 и кольцевое пространство 20, уменьшают или полностью предотвращают. На шаге 172 перед изменением расхода потока измеряют соответствующие параметры (например, посредством датчиков 36, 38, 40, 44, 46, 54, 56, 58, 60, 62, 64, 66, 67, 164). На шаге 174 на основе результатов этих измерений определяют ожидаемое изменение расхода потока.
Согласно одной подходящей методике расход отведенного потока бурового раствора 18 может вычисляться по следующей формуле:

где Standpipe - фактическое измеренное давление в нагнетательной линии 26 в процессе отведения бурового раствора 18 (например, в процессе передачи телеметрических сигналов и т.п.), а C0, C1 и C2 - константы, полученные из аппроксимирующей кривой зависимости измеренного давления в нагнетательной линии от расхода потока, протекающего через эту нагнетательную линию.
В другом примере для прогнозирования ожидаемого изменения расхода потока на основе различных параметров скважины можно использовать прогнозирующее устройство 148. Эти параметры могут содержать выходные сигналы любого из датчиков 36, 38, 40, 44, 46, 54, 56, 58, 60, 62, 64, 66, 67, 164, выходные данные гидравлической модели 92, соответствующие установленному давлению в кольцевом пространстве, размер (размеры) дросселя 34, состояния устройств 34, 74, 76, 78 регулирования потока, плотность бурового потока 18 и др. Прогнозирующим устройством 148 могут быть использованы любой параметр скважины (в том числе текущие и прошлые данные) и любое сочетание параметров скважины.
По ожидаемому изменению расхода потока гидравлическая модель 92 может прогнозировать изменение давления на забое, вызванное этим изменением расхода потока, и изменение заданного давления, необходимое для уменьшения указанного изменения давления на забое. Например, если определено, что изменение расхода потока приведет к уменьшению давления в скважине, давление в кольцевом пространстве или заданное давление в нагнетательной линии можно соответствующим образом увеличить для компенсации ожидаемого уменьшения давления на забое.
На шаге 176 передают команду на изменение расхода потока, протекающего через бурильную колонну 16 и кольцевое отверстие 20, посредством, например выдачи управляющего воздействия на устройство 160, показанное на фиг. 10, для отведения (или прерывания отведения) потока из нагнетательной линии 26 в линию возврата бурового раствора, выдачи управляющего воздействия на устройство 156 отведения потока или устройство 81, показанные на фиг. 9 и 10, для изменения расхода потока, протекающего через нагнетательную линию, и т.п. Эту команду может передавать контроллер 96 в блок 156 отведения потока или может передавать контроллер 162 в устройство 160 и т.д. В соответствии с принципами настоящего изобретения можно использовать любую команду, действие которой приводит к изменению расхода потока, протекающего через бурильную трубу 16 и кольцевое пространство 20.
В одном примере вышеупомянутая система INSITE™ может выдавать команду для начала процесса канальной передачи данных (телеметрическая передача сигналов с поверхности в скважину), тем самым периодически уменьшая расход потока, протекающего через бурильную колонну 16 и кольцевое пространство 20. Такое уменьшение расхода потока могло бы вызвать уменьшение давления на забое.
На шаге 178 по переданной команде регулируют заданное давление в кольцевом пространстве. При необходимости этот шаг может содержать требование наличия подтверждения того, что данная команда будет выполнена или по меньшей мере того, что данная команда была надлежащим образом получена до регулирования заданного давления в кольцевом пространстве. При необходимости дополнительное регулирование можно осуществлять для поддержания требуемого давления на забое, например путем непрерывного наблюдения за различными параметрами после передачи команды на изменение расхода потока, в процессе изменения расхода потока, после изменения расхода потока и т.д.
Колебания давления на забое уменьшают или предотвращают путем регулирования заданного давления в кольцевом пространстве при передаче команды. Эти колебания давления на забое в ином случае могли бы приводить к поглощению бурового раствора, разрыву пласта вокруг ствола скважины или отказу башмака обсадной колонны (например, вследствие увеличенного давления на забое), или притоку скважинных флюидов в ствол скважины (например, вследствие уменьшенного давления на забое).
Однако в некоторых случаях может быть полезным допустить некоторые колебания давления на забое, например для обеспечения связи со скважинными устройствами, реагирующими на изменения давления и т.п.В таких случаях при регулировании заданного давления в кольцевом пространстве можно учитывать некоторые заранее известные допустимые колебания давления на заботе.
Очевидно, что раскрытое выше изобретение характеризуется существенными усовершенствованиями технологии управления давлением и потоком при буровых работах. К числу этих улучшений относится применение способа 170 уменьшения или исключения колебаний давления на забое при изменении расхода потока, протекающего через бурильную колонну 16 и кольцевое пространство 20. В тех случаях, когда изменению расхода потока предшествует известное управляющее воздействие (такое, как команда на изменение расхода потока), колебания давления в результате этого изменения расхода потока могут быть предупреждены путем оперативного изменения заданного давления в кольцевом пространстве, вызванного этим управляющим воздействием, вместо ожидания получения данных об эффектах, вызванных изменением расхода потока.
Выше раскрыт способ 170 управления давлением в скважине. В одном варианте осуществления изобретения этот способ содержит передачу команды на изменение расхода потока, протекающего через кольцевое пространство 20, образованное в радиальном направлении между бурильной колонной 16 и стволом 12 скважины; и регулирование заданного давления в результате этой передачи команды.
Регулирование заданного давления можно осуществлять до изменения расхода потока, протекающего через кольцевое пространство 20, и/или во время изменения расхода потока, протекающего через кольцевое пространство 20. Регулирование заданного давления можно осуществлять до того, как изменение расхода потока будет зарегистрировано датчиками 36, 38, 40, 44, 46, 54, 56, 58, 60, 62, 64, 66, 67, 164.
Изменение расхода потока может быть вызвано отведением потока из бурильной колонны 16 в обратную линию 30 для передачи бурового потока.
Передача команды может содержать кодирование информации в виде последовательности изменений расхода потока. Например, закодированная информация может представлять собой данные, команды и т.п., предназначенные для связи с одним или несколькими скважинными устройствами.
Передача команды содержит запуск наращивания в бурильной колонне 16. Например, осуществление способа 100 выполнения наращивания вызовет изменения расхода потока, протекающего через кольцевое пространство 20 и бурильную колонну 16.
Способ 170 может содержать прогнозирование изменения расхода потока на основе измеренных параметров скважины. Этот способ может содержать прогнозирование изменения давления на забое вследствие спрогнозированного изменения расхода потока.
Кроме того, выше раскрыта система 10 бурения скважины. В одном варианте осуществления изобретения система 10 может содержать устройство 74 или 160 регулирования потока, изменяющее расход потока, протекающего через бурильную колонну 16. При поступлении команды на изменение расхода потока, протекающего через бурильную колонну 16, посредством устройства 74 или 160 регулирования потока заданное давление изменяет система 90 управления.
Устройство 74 регулирования потока может отводить поток из нагнетательной линии 26 в линию 30 возврата бурового раствора. Устройство 160 регулирования потока может отводить поток из бурильной колонны 16.
Система 90 управления может прогнозировать изменение давления, которое произойдет вследствие изменения расхода потока. Заданное давление можно регулировать путем изменения спрогнозированного давления по команде.
Заданное давление может соответствовать требуемому давлению в стволе 12 скважины и/или требуемому давлению, измеренному в кольцевом пространстве 20 на поверхности земли или рядом с ней.
Кроме того, выше раскрыт способ 170 управления давлением в скважине, причем в одном варианте осуществления изобретения способ 170 содержит передачу команды на отведение потока из бурильной колонны 16 и регулирование заданного давления вследствие этой передачи команды.
Регулирование заданного давления можно осуществлять до отведения потока, протекающего через бурильную колонну 16, и/или во время отведения потока, протекающего через бурильную колонну 16. Регулирование заданного давления можно осуществлять до того, как отведение потока будет зарегистрировано датчиками 36, 38, 40, 44, 46, 54, 56, 58, 60, 62, 64, 66, 67, 164.
Следует понимать, что различные раскрытые выше варианты осуществления настоящего изобретения могут характеризоваться разного рода пространственной ориентацией, в том числе наклонной, перевернутой, горизонтальной, вертикальной и др., а также применяться в разных конфигурациях без отклонения от сути настоящего изобретения. Варианты осуществления изобретения описаны только в качестве примеров практического применения принципов настоящего изобретения, не ограничивающихся какими-либо конкретными особенностями данных вариантов осуществления изобретения.
В вышеприведенном описании примеров вариантов осуществления изобретения слова, выражающие направление (такие как «над», «под», «верхний», «нижний» и т.п.), использованы для удобства восприятия информации, приведенной на соответствующих чертежах. Однако следует четко понимать, что объем настоящего изобретения не ограничивается какими-либо конкретными направлениями, описанными в данном документе.
Безусловно, на основе тщательного ознакомления с вышеприведенным описанием примеров вариантов осуществления изобретения специалисту будет понятно, что отдельные компоненты приведенных конкретных вариантов осуществления изобретения могут быть модифицированы, дополнены, заменены, исключены, а также в приведенные конкретные варианты осуществления изобретения могут быть внесены другие изменения в соответствии с принципами настоящего изобретения. Соответственно, следует четко понимать, что вышеприведенное подробное описание используется только в качестве примера и иллюстрации, причем суть и объем настоящего изобретения ограниваются исключительно признаками, указанными в формуле изобретения, и эквивалентными признаками.






Группа изобретений относится к средствам управления давлением и потоком при буровых работах. Техническим результатом является повышение точности управления давлением в стволе скважины. Предложен способ управления давлением в скважине, содержащий этапы, на которых получают параметры скважины и передают соответствующую информацию в гидравлическую модель, в которой определяют требуемое заданное значение давления в кольцевом пространстве. При этом требуемое заданное значение давления передают от гидравлической модели в интерфейс сбора данных и управления, контроллер и обучаемое прогнозирующее устройство для использования при прогнозировании будущих значений заданных давлений в кольцевом пространстве. Причем обучаемое прогнозирующее устройство обучают в реальном времени, и оно может прогнозировать текущие значения результатов измерений одного или нескольких датчиков на основе выходных сигналов. В случае если выходной сигнал датчика становится недоступен, прогнозирующее устройство может передавать в устройство проверки достоверности данных недостающие значения, относящиеся к результатам измерения этого датчика, по меньшей мере, в течение некоторого времени, пока выходной сигнал этого датчика снова не станет доступным. Далее способ содержит этапы, на которых передают команды на изменение потока через кольцевое пространство, образованное радиально между бурильной колонной и стволом скважины, и регулируют заданное значение давления в ответ на передачу. Предложена также система для осуществления указанного способа. 3 н. и 18 з.п. ф-лы, 11 ил.
1. Способ управления давлением в скважине, содержащий: получение параметров скважины и передачу соответствующей информации в гидравлическую модель, в которой определяют требуемое заданное значение давления в кольцевом пространстве, при этом требуемое заданное значение давления передают от гидравлической модели в интерфейс сбора данных и управления, контроллер и обучаемое прогнозирующее устройство для использования при прогнозировании будущих значений заданных давлений в кольцевом пространстве, причем обучаемое прогнозирующее устройство обучают в реальном времени, и оно может прогнозировать текущие значения результатов измерений одного или нескольких датчиков на основе выходных сигналов, в случае если выходной сигнал датчика становится недоступен, прогнозирующее устройство может передавать в устройство проверки достоверности данных недостающие значения, относящиеся к результатам измерения этого датчика, по меньшей мере, в течение некоторого времени, пока выходной сигнал этого датчика снова не станет доступным,
передачу команды на изменение потока через кольцевое пространство, образованное радиально между бурильной колонной и стволом скважины; и
регулирование заданного значения давления в ответ на передачу.
2. Способ по п. 1, в котором регулирование осуществляют до изменения потока через кольцевое пространство.
3. Способ по п. 1, в котором регулирование осуществляют во время изменения потока через кольцевое пространство.
4. Способ по п. 1, в котором изменение потока обусловлено отведением потока из бурильной колонны в линию возврата бурового раствора.
5. Способ по п. 1, в котором передача содержит кодирование информации в виде последовательности изменений потока.
6. Способ по п. 1, в котором передача содержит инициирование наращивания в бурильной колонне.
7. Способ по п. 1, в котором регулирование выполняют перед тем, как изменение потока зарегистрируют датчики.
8. Система бурения скважины, содержащая:
устройство регулирования потока, выполненное с возможностью изменять поток через бурильную колонну;
систему управления, выполненную с возможностью изменять заданное значение давления в ответ на команду для устройства регулирования потока изменить поток через бурильную колонну;
гидравлическую модель, выполненную с возможностью получения параметров скважины, определения требуемого заданного значения давления в кольцевом пространстве и передачи его в интерфейс сбора данных и управления, контроллер и обучаемое прогнозирующее устройство для использования при прогнозировании будущих значений заданных давлений в кольцевом пространстве, причем обучаемое прогнозирующее устройство выполнено с возможностью передачи в устройство проверки достоверности данных недостающие значения, относящиеся к результатам измерения датчика.
9. Система по п. 8, в которой устройство регулирования потока выполнено с возможностью отведения потока из нагнетательной линии в линию возврата бурового раствора.
10. Система по п. 8, в которой устройство регулирования потока выполнено с возможностью отведения потока из бурильной колонны.
11. Система по п. 8, в которой система управления выполнена с возможностью прогнозирования изменения давления, которое произойдет в результате изменения потока.
12. Система по п. 11, в которой обеспечено регулирование заданного значения давления путем изменения спрогнозированного давления в ответ на команду.
13. Система по п. 8, в которой обеспечено соответствие заданного значения давления требуемому давлению в стволе скважины.
14. Система по п. 8, в которой обеспечено соответствие заданного значения давления требуемому давлению, измеренному в кольцевом пространстве на поверхности земли или рядом с ней.
15. Способ управления давлением в скважине, содержащий:
получение параметров скважины и передачу соответствующей информации в гидравлическую модель, в которой определяют требуемое заданное значение давления в кольцевом пространстве, при этом требуемое заданное значение давления передают от гидравлической модели в интерфейс сбора данных и управления, контроллер и обучаемое прогнозирующее устройство для использования при прогнозировании будущих значений заданных давлений в кольцевом пространстве, причем обучаемое прогнозирующее устройство обучают в реальном времени, и оно может прогнозировать текущие значения результатов измерений одного или нескольких датчиков на основе выходных сигналов, в случае если выходной сигнал датчика становится недоступен, прогнозирующее устройство может передавать в устройство проверки достоверности данных недостающие значения, относящиеся к результатам измерения этого датчика, по меньшей мере, в течение некоторого времени, пока выходной сигнал этого датчика снова не станет доступным,
передачу команды на отведение потока из бурильной колонны; и
регулирование заданного значения давления в ответ на передачу.
16. Способ по п. 15, в котором регулирование осуществляют перед тем, как поток через бурильную колонну будет отведен.
17. Способ по п. 15, в котором регулирование осуществляют во время отведения потока через бурильную колонну.
18. Способ по п. 15, в котором изменение потока вызвано отведением потока из бурильной колонны в линию возврата бурового раствора.
19. Способ по п. 15, в котором передача содержит кодирование информации в виде последовательности отведений потока.
20. Способ по п. 15, в котором передача содержит инициирование наращивания в бурильной колонне.
21. Способ по п. 15, в котором регулирование выполняют перед тем, как отведение будет зарегистрировано датчиками.
| US 20110139506 A1, 16.06.2011 | |||
| EA 20970408 A1, 30.10.2009 | |||
| EA 200700698 A1, 31.08.2007 | |||
| Устройство для путевой блокировки на перегонах двухпутных дорог | 1926 |
|
SU6054A1 |
| US 20050092523 A1, 05.05.2005 | |||
| US 20070045006 A1, 01.03.2007. | |||

