Область техники, к которой относится изобретение
Настоящий документ в целом относится к используемому оборудованию и работам, выполняемым при бурении подземной скважины, и, согласно одному раскрытому ниже примеру, более конкретно обеспечивает использование измерения результатов давления в скважине во время бурения для выявления притоков и для их уменьшения.
Уровень техники
Для управления ходом бурения, например при бурении с управляемым давлением, бурении на депрессии, бурении на репрессии или бурении с контролем давления, может применяться гидравлическая модель. Как правило, цель заключается в поддержании давления в стволе скважины на требуемом уровне во время буровых работ. К сожалению, приток в ствол скважины во время бурения может сорвать нормальный ход буровых работ, и если оставить его неконтролируемым, привести к возникновению опасных условий.
Таким образом, следует понимать, что в области выявления и уменьшения притоков во время буровых работ необходимы постоянные улучшения.
Краткое описание чертежей
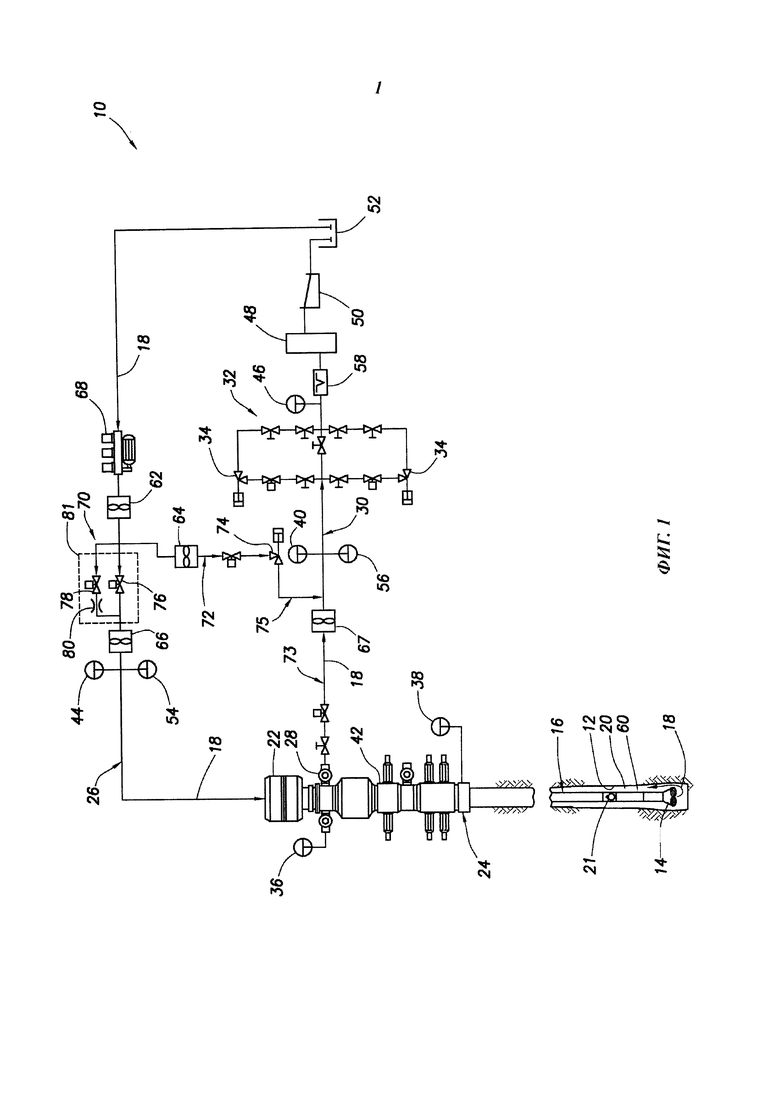
На фиг. 1 представлен типичный вид в поперечном местном разрезе системы бурения скважин и связанный с ней способ, позволяющие реализовать принципы настоящего изобретения.
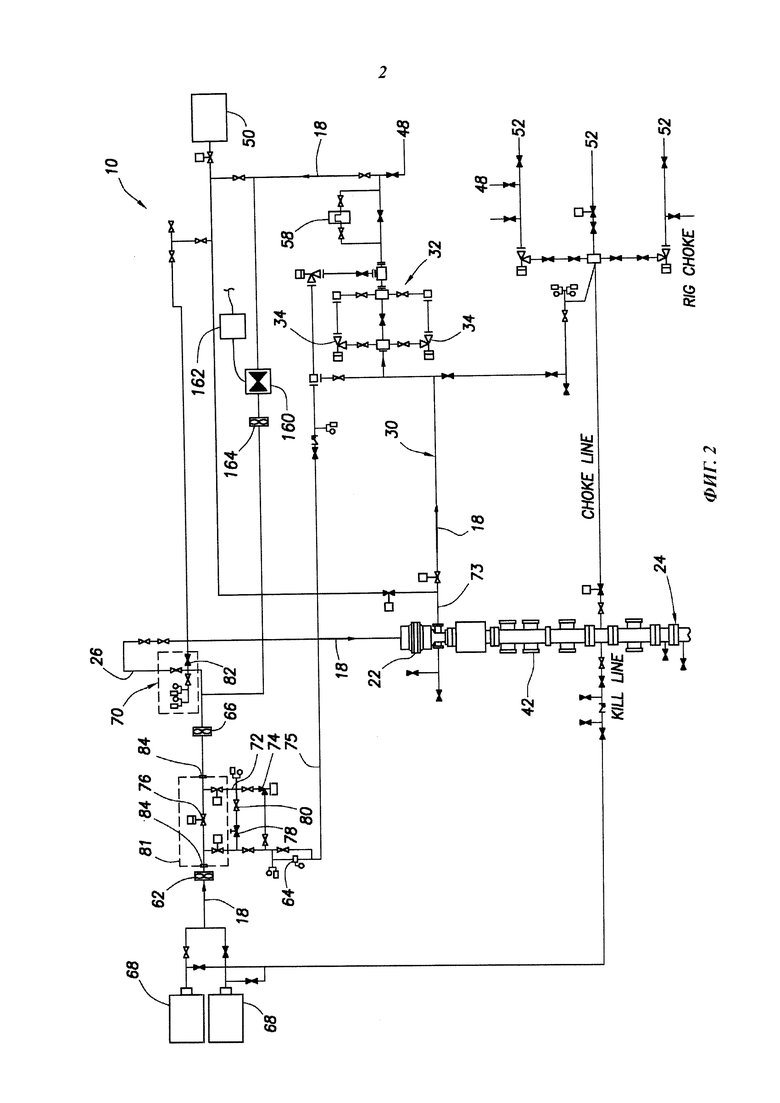
На фиг. 2 представлен типичный схематический вид другого примера системы бурения скважин и способа.
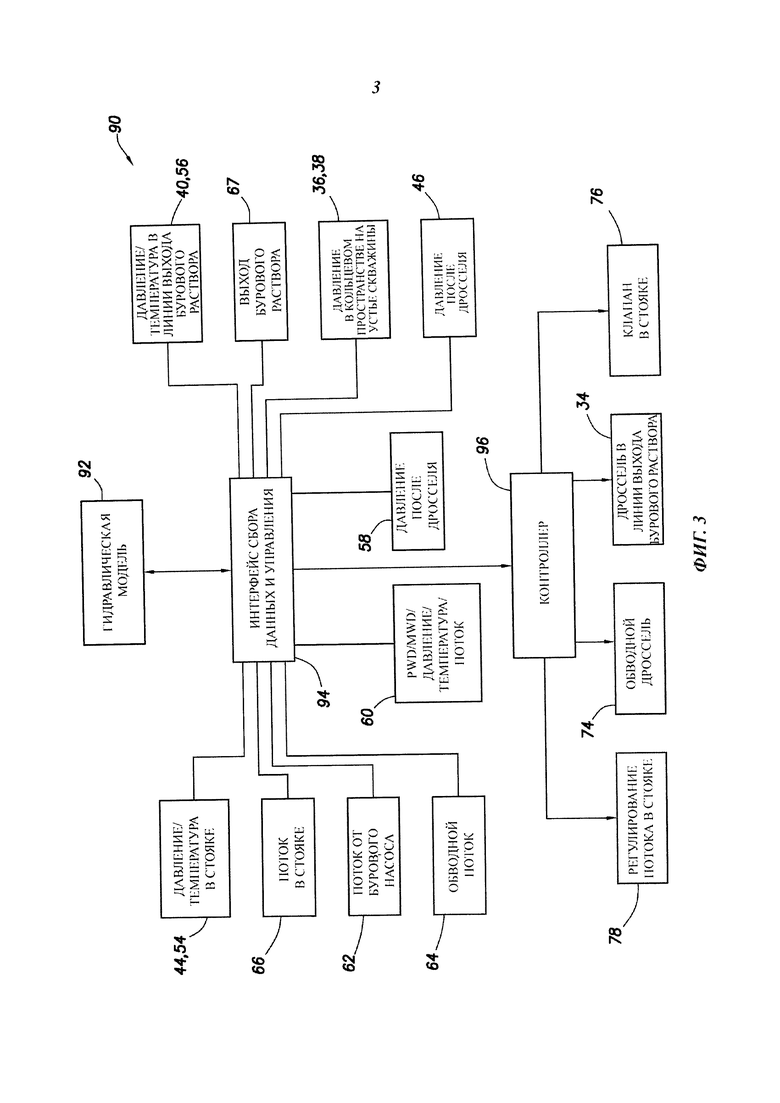
На фиг. 3 представлен типичный схематический вид системы регулирования давления и расхода, которая может применяться с системой и способом, показанными на фиг. 1 и 2.
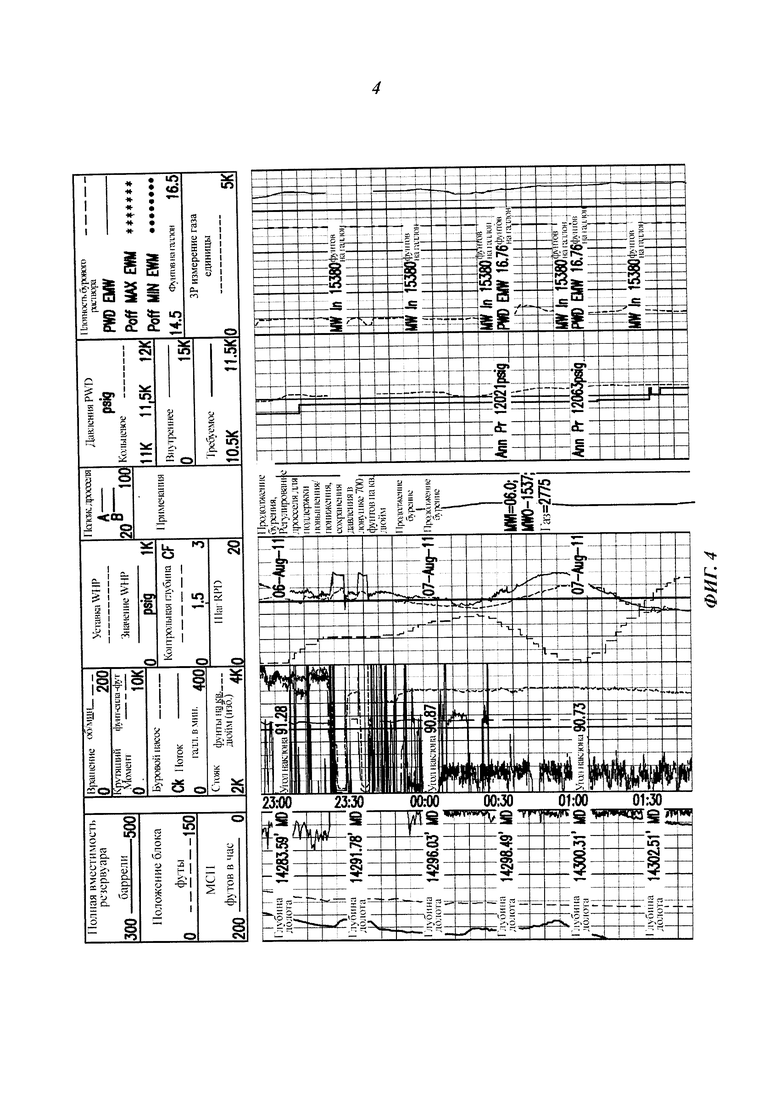
На фиг. 4 представлен типичный буровой журнал, в котором зарегистрировано событие притока.
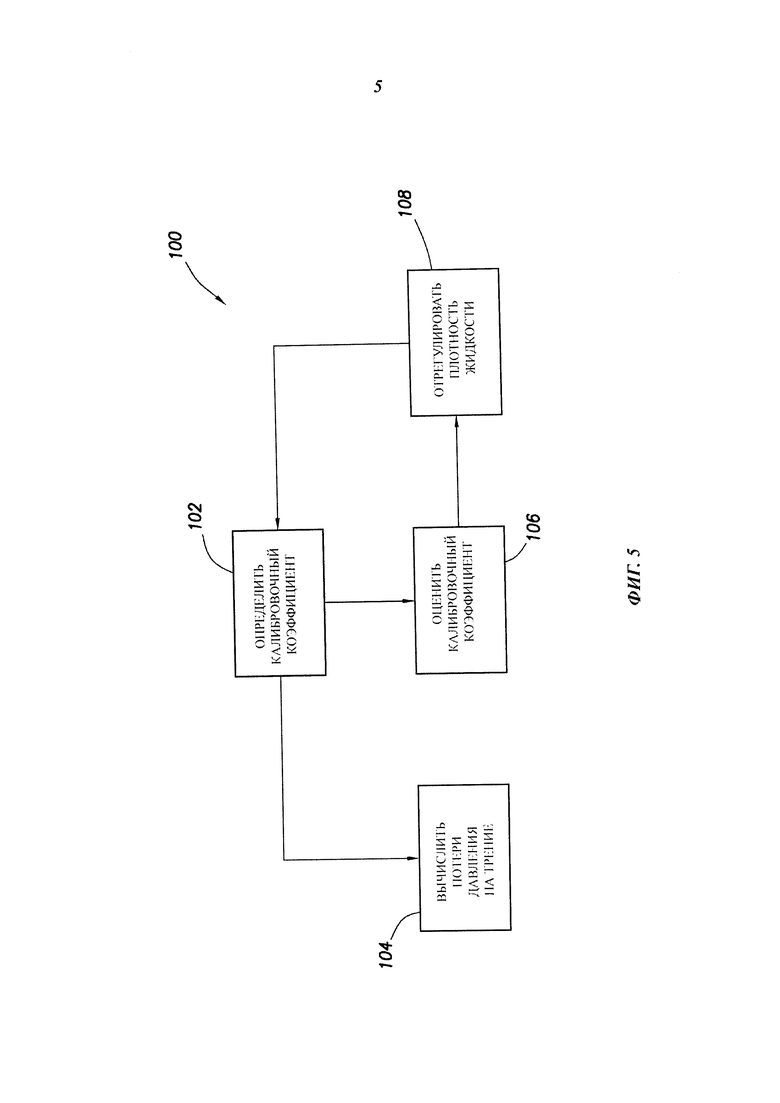
На фиг. 5 представлена типичная блок-схема способа выявления и уменьшения притока.
Подробное раскрытие изобретения
На фиг. 1 в качестве типовых показаны система 10 бурения скважин и связанный с ней способ, позволяющие реализовать принципы настоящего изобретения. Однако следует ясно понимать, что система 10 и способ представляют собой лишь один пример практического применения принципов настоящего изобретения, при этом можно привести целый ряд других примеров. Поэтому объем раскрытия настоящего изобретения не ограничивается деталями системы 10 и способа, раскрытых в настоящем описании и/или изображенных на чертежах.
В примере, представленном на фиг. 1, ствол 12 скважины бурят путем вращения бурового долота 14 на конце бурильной колонны 16. Буровая текучая среда 18, обычно называемая буровым раствором, циркулирует, опускаясь через бурильную колонну 16, выходя из бурового долота 14 и поднимаясь вверх по кольцевому пространству 20, образованному между бурильной колонной и стволом 12 скважины, с целью охлаждения бурового долота, смазывания бурильной колонны, удаления бурового шлама и обеспечения измерения для регулирования забойного давления. Обратный клапан 21 (как правило, хлопушечный обратный клапан) предотвращает течение буровой текучей среды 18 вверх сквозь бурильную колонну 16 (например, при наращивании бурильной колонны).
Контроль давления в стволе скважины очень важен при бурении с управляемым давлением и других типах буровых работ. Предпочтительно давление в стволе скважины точно регулируется в целях предотвращения чрезмерного ухода текучей среды в пласт, окружающий ствол 12 скважины, нежелательного разрыва пласта, нежелательного притока текучих сред из пласта в ствол скважины и т.д.
При типовом бурении с управляемым давлением желательно поддерживать давление в стволе скважины лишь немного большим, чем поровое давление в пласте, пересеченном стволом скважины, без превышения давления разрыва пласта. Этот способ особенно полезен в ситуациях, когда граница между поровым давлением и давлением разрыва относительно невелика.
При типовом бурении на депрессии желательно поддерживать давление в стволе скважины несколько меньшим, чем поровое давление, тем самым получая контролируемый приток текучей среды из пласта. При типовом бурении на репрессии желательно поддерживать давление в стволе скважины несколько большим, чем поровое давление, тем самым предотвращая (или по меньшей мере уменьшая) приток текучей среды из пласта.
Азот, или другой газ, или другая более легкая текучая среда может добавляться к буровой текучей среде 18 для контроля давления. Это способ оказывается полезным при буровых работах на депрессии (с отрицательным дифференциальным давлением в системе скважина - пласт).
В системе 10 дополнительный контроль за давлением в стволе скважины достигается путем закрытия кольцевого пространства 20 (например, его изоляции от сообщения с атмосферой и обеспечения возможности создания избыточного давления в кольцевом пространстве на поверхности или вблизи от нее) при помощи вращающегося отклоняющего превентора (ВОП (RCD)) 22. ВОП (RCD) 22 закрывает пространство вокруг бурильной колонны 16 над устьевым оборудованием 24. Хотя это не показано на фиг. 1, бурильная колонна 16 проходит вверх через ВОП (RCD) 22 для присоединения, например, к роторному столу (не показан), буровому стояку 26, ведущей буровой трубе (не показана), верхнему приводу и/или другому обычно применяемому буровому оборудованию.
Буровая текучая среда 18 выходит из устьевого оборудования 24 через боковую задвижку 28, сообщающуюся с кольцевым пространством 20 ниже ВОП (RCD) 22.
После этого текучая среда 18 протекает по линиям 30, 73 выхода бурового раствора к дроссельному манифольду 32, содержащему резервированные дроссели 34 (только один из которых может использоваться в каждый момент времени). Противодавление прикладывается к кольцевому пространству 20 путем переменного ограничения потока текучей среды 18 через работающий (работающие) дроссель (дроссели) 34.
В других примерах для приложения противодавления к кольцевому пространству 20 могут использоваться регуляторы потока, отличные от дросселей 34. Например, клапан или другой тип регулятора потока может использоваться для ограничения или отведения потока, чтобы регулировать противодавление, прикладываемое к кольцевому пространству 20.
В примере, представленном на фиг. 1, чем больше ограничение потока, протекающего через дроссель 34, тем больше противодавление, прикладываемое к кольцевому пространству 20. Таким образом, давление в скважине (например, давление внизу ствола 12 скважины, давление на колонный башмак на забое скважины, давление на конкретный пласт или зону и т.д.) можно легко регулировать путем изменения противодавления, прикладываемого к кольцевому пространству 20. Гидравлическая модель может использоваться, как подробнее раскрыто ниже, для определения давления, прикладываемого к кольцевому пространству 20 на поверхности или вблизи от нее, что обеспечивает требуемое давление в скважине таким образом, чтобы оператор (или автоматическая система управления) мог (могла) легко определить, как отрегулировать давление, приложенное к кольцевому пространству на поверхности или вблизи от нее (которое нетрудно измерить), для получения требуемого давления в скважине.
Давление, приложенное к кольцевому пространству 20, можно измерить на поверхности или вблизи от нее при помощи набора датчиков 36, 38, 40 давления, каждый из которых сообщается с кольцевым пространством. Датчик 36 давления измеряет давление ниже ВОП (RCD) 22, но выше блока 42 противовыбросовых превенторов ПВП (ВОР). Датчик 38 давления измеряет давление в стволе скважины ниже блока 42 ПВП (ВОР). Датчик 40 давления измеряет давление в линиях 30, 73 выхода бурового раствора перед дроссельным манифольдом 32.
Другой датчик 44 давления измеряет давление в буровом стояке 26. Еще один датчик 46 давления измеряет давление после дроссельного манифольда 32, но перед сепаратором 48, виброситом 50 и приемной емкостью 52 для бурового раствора. К числу дополнительных датчиков относятся датчики 54, 56 температуры, расходомер 58 Кориолиса и расходомеры 62, 64, 66.
Не все эти датчики необходимы. Например, система 10 могла бы содержать только два из трех расходомеров 62, 64, 66. Однако входные данные от всех имеющихся датчиков могут быть полезными для гидравлической модели при определении давления, которое следует приложить к кольцевому пространству 20 при буровых работах.
При необходимости можно использовать и другие типы датчиков. Например, необязательно, чтобы расходомер 58 представлял собой расходомер Кориолиса, поскольку вместо него можно использовать турбинный расходомер, акустический расходомер или другой тип расходомера.
Кроме того, бурильная колонна 16 может содержать собственные датчики 60, например, для непосредственного измерения давления в скважине. Такие датчики 60 могут относиться к типу, известному специалистам как измерение давления во время бурения (PWD, от англ. pressure while drilling), телеметрическое сопровождение бурения (MWD, от англ. measurement while drilling) и/или каротаж во время бурения (LWD, от англ. logging while drilling). Эти системы датчиков бурильной колонны обычно обеспечивают, по меньшей мере, измерение давления, а также могут обеспечить измерение температуры, определение характеристик бурильной колонны (таких как вибрация, нагрузка на долото, прихват-проскальзывание и т.д.), характеристик пласта (таких как удельное сопротивление, плотность и т.д.) и/или другие измерения. Для передачи на поверхность результатов измерений, выполняемых скважинными датчиками, могут использоваться различные формы проводной и беспроводной телеметрии (акустическая, с использованием импульсов давления, электромагнитная и т.д.).
При необходимости в систему 10 можно включить дополнительные датчики. Например, еще один расходомер 67 можно использовать для измерения скорости потока текучей среды 18, выходящей из устьевого оборудования 24, еще один расходомер Кориолиса (не показан) можно подключить непосредственно перед или за буровым насосом 68 и т.д.
При необходимости в систему 10 можно включить меньшее количество датчиков. Например, выработку бурового насоса 68 можно определять с помощью подсчета числа ходов насоса вместо того, чтобы использовать расходомер 62 или любые другие расходомеры.
Следует отметить, что сепаратор 48 может представлять собой 3- или 4-фазный сепаратор или дегазатор бурового раствора (иногда называемый «механическим дегазатором»). Однако в системе 10 необязательно использовать сепаратор 48.
Буровой насос 68 прокачивает буровую текучую среду 18 через буровой стояк 26 внутрь бурильной колонны 16. Насос 68 получает текучую среду 18 из приемной емкости 52 для бурового раствора и направляет ее через нагнетательный манифольд 70 к стояку 26. После этого текучая среда 18 циркулирует вниз через бурильную колонну 16, вверх по кольцевому пространству 20, по линиям 30, 73 выхода бурового раствора, по дроссельному манифольду 32, а затем проходит через сепаратор 48 и вибросито 50 к приемной емкости 52 бурового раствора для обработки и рециркуляции.
Следует отметить, что в раскрытой выше системе 10 дроссель 34 не может использоваться для регулирования противодавления, прикладываемого к кольцевому пространству 20 для регулирования давления в скважине, если текучая среда 18 не протекает через дроссель. При обычно применяемых операциях бурения на репрессии недостаток потока текучей среды 18 возникает, например, при наращивании бурильной колонны 16 (например, для добавления еще одного отрезка бурильной трубы к бурильной колонне по мере того, как ствол 12 скважины становится глубже в процессе бурения), при этом, вследствие недостаточной циркуляции, потребуется, чтобы давление в скважине регулировалось исключительно плотностью текучей среды 18.
Однако в системе 10 поток текучей среды 18 через дроссель 34 можно поддерживать, даже если текучая среда не циркулирует через бурильную колонну 16 и кольцевое пространство 20 в то время, как производится наращивание бурильной колонны. Так, давление все же может быть приложено к кольцевому пространству 20 путем ограничения потока текучей среды 18 через дроссель 34, даже если отдельный буровой насос противодавления не используется.
Когда текучая среда 18 не циркулирует через бурильную колонну 16 и кольцевое пространство 20 (например, во время наращивания бурильной колонны), текучая среда подается от насоса 68 к дроссельному манифольду 32 по обводной линии 72, 75. Таким образом, текучая среда 18 может обходить буровой стояк 26, бурильную колонну 16 и кольцевое пространство 20 и течь напрямую от насоса 68 к линии 30 выхода бурового раствора, которая продолжает сообщаться с кольцевым пространством 20. Ограничение этого потока дросселем 34 вызовет, таким образом, приложение давления к кольцевому пространству 20 (например, при типовом бурении с управляемым давлением).
На фиг. 1 показано, что и обводная линия 75, и линия 30 выхода бурового раствора сообщаются с кольцевым пространством 20 через единственную линию 73. Однако вместо этого обводную линию 75 и линию 30 выхода бурового раствора можно было бы по отдельности присоединить к устьевому оборудованию 24, например, при помощи дополнительной боковой задвижки (например, ниже ВОП (RCD) 22), при этом каждая из линий 30, 75 непосредственно сообщалась бы с кольцевым пространством 20.
Хотя это могло бы потребовать прокладки некоторого количества дополнительных трубопроводов на буровой площадке, воздействие на давление в кольцевом пространстве было бы практически таким же, как при подключении обводной линии 75 и линии 30 выхода бурового раствора к общей линии 73. Таким образом, следует понимать, что можно использовать ряд различных конфигураций системы 10, по-прежнему оставаясь в пределах объема раскрытия настоящего изобретения.
Поток текучей среды 18 через обводную линию 72, 75 регулируется дросселем или другим типом регулятора 74 потока. Линия 72 расположена перед регулятором 74 обводного потока, а линия 75 - после регулятора обводного потока.
Поток текучей среды 18 через буровой стояк 26, по существу, контролируется клапаном или другим типом регулятора 76 потока. Поскольку скорость потока текучей среды 18 через каждую из таких линий, как буровой стояк и обводные линии 26, 72, может использоваться для того, чтобы определять, как эти потоки воздействуют на давление в стволе скважины, в эти линии включаются расходомеры 64, 66, изображенные на фиг. 1.
Однако скорость потока через буровой стояк 26 можно определить, даже если использовать только расходомеры 62, 64, при этом скорость потока через обводную линию 72 можно определить, даже если использовать только расходомеры 62, 66. Таким образом, следует понимать, что система 10 необязательно должна включать в себя все датчики, изображенные на фиг. 1 и раскрытые в настоящем документе, и вместо этого система могла бы включать дополнительные датчики, различные сочетания и/или типы датчиков и т.д.
В примере, представленном на фиг. 1, регулятор 78 обводного потока и ограничитель 80 потока могут использоваться для заполнения бурового стояка 26 и бурильной колонны 16 после наращивания бурильной колонны и для выравнивания давления между буровым стояком и линиями 30, 73 выхода бурового раствора перед открытием регулятора потока 76. В противном случае внезапное открытие регулятора потока 76 перед заполнением и повышением давления в буровом стояке 26 и бурильной колонне 16 при помощи текучей среды 18 могло бы вызвать нежелательный процесс быстрого изменения давления в кольцевом пространстве 20 (например, вследствие временной потери потока к дроссельному манифольду 32, когда буровой стояк и бурильная колонна заполнены текучей средой, и т.д.).
Открытие регулятора 78 обводного потока бурового стояка после завершения наращивания позволяет заполнить текучей средой 18 буровой стояк 26 и бурильную трубу 16, в то время как значительно большая часть текучей среды продолжает протекать по обводной линии 72, тем самым обеспечивая возможность непрерывного приложения давления к кольцевому пространству 20. После того, как давление в буровом стояке 26 сравняется с давлением в линиях 30, 73 выхода бурового раствора и обводной линии 75, можно открыть регулятор 76 потока, после чего регулятор 74 потока можно закрыть, чтобы медленно отвести большую часть текучей среды 18 от обводной линии 72 к буровому стояку 26.
Перед наращиванием бурильной колонны 16 аналогичную процедуру, но в обратном порядке, можно выполнить, чтобы постепенно отвести поток текучей среды 18 от бурового стояка 26 к обводной линии 72 в ходе подготовки к добавлению дополнительной бурильной трубы к бурильной колонне 16. Таким образом, регулятор 74 потока можно постепенно открывать, медленно отводя большую часть текучей среды 18 от бурового стояка 26 к обводной линии 72, после чего регулятор 76 потока можно закрыть.
Следует отметить, что регулятор 78 потока и ограничитель 80 потока могут быть объединены в единственный элемент (например, регулятор потока, обладающий функцией ограничения потока), а регуляторы 76, 78 потока могут быть объединены в единственный регулятор 81 потока (например, единственный дроссель, который может постепенно открываться, медленно заполняя и повышая давление в буровом стояке 26 и бурильной колонне 16 после присоединения к ней бурильной трубы, а затем открывается полностью, обеспечивая максимальный поток во время бурения).
Однако, поскольку типовые традиционные буровые установки оснащены регулятором 76 потока в виде клапана в нагнетательном манифольде 70 и использование клапана стояка предусмотрено обычными режимами бурения, действующие по отдельности регуляторы 76, 78 потока сохраняют возможность использования в качестве регулятора 76 потока. Ниже регуляторы 76, 78 потока иногда упоминаются совместно, как если бы они представляли собой единый регулятор 81 потока, однако следует понимать, что регулятор 81 потока может содержать отдельные регуляторы 76, 78 потока.
Другой типовой пример представлен на фиг. 2. В этом примере регулятор 76 потока присоединен выше по потоку от нагнетательного манифольда 70 буровой установки. Такая схема расположения имеет определенные преимущества, состоящие, например, в том, что нагнетательный манифольд 70 буровой установки или линия между манифольдом и ведущей буровой трубой не требуют никаких модификаций, стравливающий клапан 82 бурового стояка можно использовать для продувки стояка 26, как при обычных буровых работах (экипажу буровой установки не нужно изменять процедуру) и т.д.
Регулятор 76 потока можно присоединить между буровым насосом 68 и нагнетательным манифольдом 70 при помощи, например, быстроразъемных соединителей 84 (таких как быстроразъемное соединение с накидной крыльчатой гайкой и т.д.). Это позволяет легко приспособить регулятор 76 потока для присоединения к различным напорным линиям буровой установки.
Специально приспособленный, полностью автоматизированный регулятор 76 потока (например, автоматически управляемый контроллером 96, изображенным на фиг. 3) можно использовать для регулирования потока через буровой стояк 26 вместо использования традиционного клапана стояка в нагнетательном манифольде 70 буровой установки. Весь регулятор 81 потока можно приспособить для варианта использования, раскрытого в настоящем описании (например, для регулирования потока через буровой стояк 26, наряду с отведением текучей среды 18 между буровым стояком и обводной линией 72, чтобы тем самым регулировать давление в кольцевом пространстве 20 и т.д.), вместо его применения для традиционных целей бурения.
В примере, представленном на фиг. 2, дистанционно управляемый клапан или другой регулятор 160 потока в некоторых случаях используется для отведения потока текучей среды 18 от бурового стояка 26 к линии 30 выхода бурового раствора ниже по потоку от дроссельного манифольда 32, чтобы передавать сигналы, данные, команды и т.д. скважинным инструментам (таким как показанная на фиг. 1 компоновка низа бурильной колонны, содержащая датчики 60, другое оборудование, включая забойные двигатели, отклонители, устройства управления и т.д.). Устройством 160 управляет телеметрический контроллер 162, кодирующий информацию в виде последовательности отведений потока, распознаваемой скважинными инструментами (например, некоторое уменьшение потока через скважинный инструмент происходит в результате соответствующего отведения потока устройством 160 от бурового стояка 26 к линии 30 выхода бурового раствора).
Подходящий телеметрический контроллер и подходящий дистанционно управляемый регулятор потока обеспечиваются системой GEO-SPAN(TM), поставляемой на рынок компанией Halliburton Energy Services, Inc. (Хьюстон, Техас, США). Телеметрический контроллер 162 может быть подключен к системе INSITE(TM) или другому интерфейсу 94 сбора данных и управления в системе 90 управления. Однако другие типы телеметрических контроллеров и регуляторов потока также могут использоваться в соответствии с объемом раскрытия настоящего изобретения.
Следует отметить, что регуляторы 74, 76, 78 потока и дроссели 34 предпочтительно выполнены с возможностью дистанционного автоматического управления в целях поддержания требуемого давления в скважине путем поддержания требуемого давления в кольцевом пространстве на поверхности или вблизи от нее. Однако, в соответствии с объемом раскрытия настоящего изобретения, один или несколько из этих регуляторов 74, 76, 78 потока и дросселей 34 могут быть выполнены с ручным управлением.
Типовая система 90 управления давлением и расходом, которая может использоваться совместно с системой 10 и соответствующими способами, изображенными на фиг. 1 и 2, представлена на фиг. 3. Система 90 управления предпочтительно является полностью автоматизированной, хотя некоторое вмешательство оператора может потребоваться, например для предотвращения нештатной работы, инициирования определенных режимов, обновления параметров и т.д.
Система 90 управления содержит гидравлическую модель 92, интерфейс 94 сбора данных и управления и контроллер 96 (такой как программируемый логический контроллер, или ПЛК, компьютер с надлежащим программным обеспечением и т.д.). Хотя эти элементы 92, 94, 96 показаны на фиг. 3 отдельно, все или любые из них могут быть объединены в единственный элемент, и, кроме того, функции, выполняемые этими элементами, могут быть разделены на дополнительные элементы, могут быть предусмотрены другие дополнительные элементы и/или функции и т.д.
Гидравлическая модель 92 используется в системе 90 управления для определения требуемого давления в кольцевом пространстве на поверхности или вблизи от нее в целях достижения требуемого давления в скважине. Такие данные, как геометрия скважины, свойства текучей среды и информация о периферийной скважине (например, геотермический градиент и градиент порового давления и т.д.), используются гидравлической моделью 92 при выполнении определения наряду с данными датчика с передачей сигналов в режиме реального времени, полученными интерфейсом 94 сбора данных и управления.
Таким образом, между гидравлической моделью 92 и интерфейсом 94 сбора данных и управления происходит постоянный двухсторонний обмен данными и информацией. Важно понимать, что назначение интерфейса 94 сбора данных и управления заключается в поддержании практически постоянного потока данных в режиме реального времени от датчиков 44, 54, 66, 62, 64, 60, 58, 46, 36, 38, 40, 56, 67 к гидравлической модели 92, чтобы гидравлическая модель располагала информацией, необходимой ей для адаптации к изменяющимся обстоятельствам и обновления требуемого давления в кольцевом пространстве, при этом назначение гидравлической модели заключается в практически постоянной подаче на интерфейс сбора данных и управления требуемого значения давления в кольцевом пространстве.
Гидравлической моделью, пригодной для использования в качестве гидравлической модели 92 в системе 90 управления, являются REAL TIME HYDRAULICS (ТМ) или GB SETPOINT (ТМ), поставляемые на рынок компанией Halliburton Energy Services, Inc. (Хьюстон, Техас, США). Другая подходящая гидравлическая модель предлагается под торговой маркой IRIS (ТМ), а еще одну можно приобрести у компании SINTEF (Тронхейм, Норвегия). Любая подходящая гидравлическая модель может использоваться в системе 90 управления в соответствии с принципами раскрытия настоящего изобретения.
Интерфейсом сбора данных и управления, подходящим для использования в качестве интерфейса 94 сбора данных и управления в системе 90 управления, являются SENTRY(TM) и INSITE(TM), поставляемые на рынок компанией Halliburton Energy Services, Inc. Любой подходящий интерфейс сбора данных и управления может использоваться в системе 90 управления в соответствии с принципами раскрытия настоящего изобретения.
Назначение контроллера 96 заключается в поддержании требуемого заданного давления в кольцевом пространстве путем управления работой дросселя 34 выхода бурового раствора и других устройств. Когда обновленное значение требуемого давления в кольцевом пространстве передают от интерфейса 94 сбора данных и управления на контроллер 96, контроллер использует требуемое давление в кольцевом пространстве в качестве заданного значения и управляет работой дросселя 34 так (например, увеличивая или уменьшая сопротивление потоку через дроссель по мере необходимости), чтобы поддерживать заданное давление в кольцевом пространстве 20. Для увеличения сопротивления потоку можно увеличить степень закрытия дросселя 34, а для уменьшения сопротивления потоку дроссель можно приоткрыть.
Поддержание заданного давления осуществляется путем сравнения заданного давления с измеренным давлением в кольцевом пространстве (например, с давлением, измеряемым любым из датчиков 36, 38, 40) с последующим уменьшением сопротивления потоку через дроссель 34, если измеренное давление больше заданного, и увеличением сопротивления потоку через дроссель, если измеренное давление меньше заданного. Конечно, если величины заданного и измеренного давления одинаковы, никакой регулировки дросселя 34 не требуется. Этот процесс предпочтительно автоматизирован, поэтому вмешательства оператора не требуется, хотя при необходимости вмешательство оператора возможно.
Контроллер 96 можно также использовать для управления работой регуляторов 76, 78 потока и регулятора 74 обводного потока в стояке. Таким образом, контроллер 96 может применяться для автоматизации отведения потока текучей среды 18 от бурового стояка 26 к обводной линии 72 до наращивания бурильной колонны 16, отведения потока от обводной линии к буровому стояку после выполнения наращивания и последующего возобновления нормальной циркуляции текучей среды 18 для бурения. Эти автоматизированные процессы также не требуют вмешательства оператора, хотя при необходимости вмешательство оператора можно использовать для поочередного инициирования каждого процесса, ручного управления каким-либо компонентом системы и т.д.
Чтобы обеспечить защиту от использования ошибочных данных, убедиться в том, что измеренные значения соответствуют прогнозируемым и т.д., в системе 90 могут применяться различные способы проверки правильности и прогнозирования данных. Подходящие способы проверки правильности и прогнозирования данных раскрыты в международной заявке №PCT/US11/59743, хотя при необходимости можно использовать и другие способы.
При бурении в системе открытой циркуляции инструменты для измерения давления во время бурения (PWD) использовались для текущего контроля забойного давления и выявления событий в стволе скважины. При бурении с управляемым давлением (MPD, от англ. managed pressure drilling) и использовании дросселей 34 или регуляторов потока другого типа для поддержания требуемого давления в стволе скважины применение измерений PWD для обнаружения событий существенно ограничивалось.
Калибровочный коэффициент CF для регулирования потерь давления на жидкостное трение, вычисляемых с помощью гидравлической модели 92, может быть задан следующим уравнением:

где PWD psi - это результат измерения давления, выполненного инструментом для PWD (таким как датчик 60), присоединенным к бурильной колонне 16, WHP - это давление в кольцевом пространстве, измеренное на поверхности или вблизи от нее (например, на устьевом оборудовании 24), a Hydrostatic - это статическое давление в стволе скважины (например, без циркуляции через бурильную колонну и кольцевое пространство 20) в каком-то месте в стволе скважины, обусловленное весом столба текучей среды 18 над этим местом. Гидростатическое давление вычисляют на основе измеренной плотности текучей среды 18 и измеренной фактической вертикальной глубины столба текучей среды над местом в стволе скважины.
Model friction (смоделированные потери давления на трение) вычисляют в режиме реального времени с помощью гидравлической модели 92. Калибровочный коэффициент (CF) применяют к смоделированным потерям давления на трение (CF*model friction) для вычисления фактических потерь давления на трение (Friction).
Числитель приведенного выше уравнения (PWD psi - WHP - Hydrostatic) при нормальных условиях бурения с управляемым давлением представляет собой определение измеряемых потерь давления на трения в стволе 12 скважины и является значением в реальном времени (каждый из членов числителя получают для использования в уравнении в режиме реального времени). Частота передачи данных PWD может составлять от нескольких секунд до нескольких минут, а Уравнение (1) может применяться для вычисления калибровочного коэффициента CF каждый раз при получении данных PWD.
При нормальных обстоятельствах разница между моделируемыми и измеряемыми потерями давления на трение (знаменатель и числитель соответственно в приведенном выше уравнении) очень невелика, поэтому CF должен приблизительно быть равен 1. Если CF возрастает, то это указывает на возрастание жидкостного трения в стволе 12 скважины (например, больше бурового шлама в стволе скважины, частичное обрушение ствола скважины и т.д.). Если CF начинает уменьшаться, это указывает на уменьшение жидкостного трения, что может быть результатом газлифта (например, расширения газа в кольцевом пространстве 20 при его протекании вверх к поверхности, вследствие которого уменьшается эффективная плотность столба текучей среды 18 в кольцевом пространстве).
При бурении с управляемым давлением (например, бурении с кольцевым пространством, закрытым для сообщения с атмосферой на поверхности или вблизи от нее, и с давлением в кольцевом пространстве 20, регулируемым в целях регулирования давления в скважине) одним или несколькими дросселями 34, ограничивающими поток текучей среды 18 из кольцевого пространства, можно управлять, используя следующее уравнение:

где Desired - это требуемое давление в любом месте в стволе скважины (например, на забое или дальнем конце ствола скважины, на колонном башмаке, в зоне пониженного давления, пересеченной стволом скважины, и т.д.), a Friction - это давление, обусловленное трением текучей среды в кольцевом пространстве 20 (Friction=CF*model friction, как обсуждалось выше).
Дроссель (дроссели) 34 может (могут) еще больше открываться (вследствие меньшего ограничения потока), если WHP больше, чем давление, задаваемое приведенным выше уравнением, при этом дроссель (дроссели) может (могут) еще больше закрываться (вследствие большего ограничения потока), если WHP меньше, чем давление, задаваемое приведенным выше уравнением. Поэтому использовать соответствующие значения для членов Уравнения (2) в целях вычисления WHP очень важно для управления работой дросселя (дросселей) 34, или, иначе, для точного регулирования давления в стволе 12 скважины.
Было обнаружено, что, после возникновения притока в ситуации, когда инструмент PWD или другой датчик 60 давления является частью бурильной колонны 16, гидравлическая модель 92 скорректирует CF (например, применяя приведенное выше Уравнение (1)) для поддержания требуемого давления в стволе скважины (см. пример бурового журнала, представленный на фиг. 4). Когда система 90 управления регулирует давление в стволе 12 скважины в автоматическом режиме (например, управление дросселем (дросселями) 34 осуществляется автоматически с целью поддержания требуемого давления в стволе скважины) и при работающей гидравлической модели 92, CF может быстро уменьшаться (например, достигая 0,001) при возникновении притока.
Такой низкий CF является неправильным, поскольку при любой циркулирующей текучей среде 18 в стволе 12 скважины должно быть трение. Ошибка в Уравнении 1, возникающая в случае притока, обусловлена, таким образом, членом Hydrostatic (например, плотностью текучей среды в статическом состоянии, используемой для вычисления гидростатического давления). Во время притока, по мере того, как газ перемещается вверх по кольцевому пространству 20, а приточная текучая среда (например, газовый конденсат и т.д.) переходит из состояния однофазной текучей среды в многофазное состояние, гидростатическое давление в кольцевом пространстве 20 уменьшается.
Чтобы использовать PWD для выявления и предотвращения проявления при операциях бурения с управляемым давлением (MPD), идентификация заброса (притока) может осуществляться при помощи контроля в режиме реального времени, приложений, выполняющих анализ тенденций, и/или анализа с использованием нейронных сетей и т.д. калибровочного коэффициента CF, вычисляемого гидравлической моделью 92. При необходимости могут использоваться также другие способы идентификации притока по характеристикам коэффициента CF (например, оценка наклона, производная второго порядка и т.д. коэффициента CF). При анализе коэффициента CF в режиме реального времени, если в какой-то момент времени возникает заданная регрессия или агрессия, может быть инициирован сигнал тревоги, при этом гидравлическая модель 92 может начать корректирование члена Hydrostatic алгоритма управления с целью предотвращения любого нового притока.
Следующее уравнение представляет собой алгоритм, применение которого, как подробно обсуждается ниже, предотвращает увеличение притока:

где Adjusted MW - это корректируемый удельный вес бурового раствора (плотность текучей среды 18) для использования при вычислении члена Hydrostatic, Prior MW - это очередная предварительно вычисленная или измеренная плотность текучей среды, Prior Friction - это очередные предварительно моделируемые потери давления на трение, Observed Friction - это вычисленные на данный момент потери давления на трение (например, с использованием Уравнения 2), a TVD - это фактическая вертикальная глубина. Отметим, что член 0,052 служит для преобразования удельного веса бурового раствора в фунтах на галлон в фунты на квадратный дюйм (при умножении на TVD в футах). Этот коэффициент преобразования изменится в случае изменения остальных единиц измерения.
Применяемое повторно, это Уравнение 3 будет корректировать член Hydrostatic до тех пор, пока CF не станет, по существу, равным 1. После ухода притока из кольцевого пространства 20, CF начнет возрастать и, с помощью того же уравнения, член Hydrostatic будет соответствующим образом откорректирован.
Как только приток будет идентифицирован (например, при помощи контроля в реальном времени, приложений, выполняющих анализ тенденций, анализа с использованием нейронных сетей и т.д.), Уравнение 3 можно повторно применять для постепенного уменьшения члена Hydrostatic Уравнения 1. При практическом использовании это приведет к тому, что член Hydrostatic Уравнения 1 будет постепенно уменьшаться, пока член CF не стабилизируется и не начнет снова возрастать.
В примере бурового журнала, приведенном на фиг. 4, калибровочный коэффициент CF уменьшается почти до нуля, когда возникает приток в скважину. Отметим, что уменьшение CF начинается раньше значительного увеличения вместимости резервуара (для бурового раствора) и раньше увеличения 3Р измерений объема газа. Это (приток и итоговое уменьшение CF) представляет собой ситуацию, которую можно избежать, используя принципы, раскрытые в настоящем документе.
Следует отметить, что в буровом журнале, представленном на фиг. 4, удельный вес бурового раствора (MW, от англ. mud weight) остается неизменным, даже после возникновения притока, вместимость резервуара увеличилась, а возросший объем газа обнаружен на поверхности. Последствия такого отсутствия регулирования плотности текучей среды после возникновения притока вместе с последующим уменьшением калибровочного коэффициента CF можно смягчить благодаря использованию принципов, раскрытых в настоящем описании.
Поскольку уменьшение калибровочного коэффициента CF, изображенное в буровом журнале, представленном на фиг. 4, предшествует увеличению вместимости резервуара и росту результатов измерения газа на поверхности, следует понимать, что это уменьшение CF может служить ранним признаком возникновения притока. Используя упомянутые выше способы, такие как контроль в режиме реального времени, приложения, выполняющие анализ тенденций, анализ с использованием нейронных сетей и т.д., такое уменьшение CF, указывающее на приток, можно легко идентифицировать, чтобы оператор мог быть предупрежден, корректирующие меры (например, использование приведенного выше Уравнения 3 для изменения члена Hydrostatic и т.д.) приняты, а последующие притоки предотвращены.
Такой подход к раннему выявлению и предотвращению заброса (притока) существенно отличается от прежних подходов. Выявление заброса при помощи MPD, как правило, осуществляется посредством контроля регулирования дросселей и значений разности массового потока (массовый поток из скважины минус массовый поток в скважину), и до сих пор такие способы давали неоднозначные результаты.
Когда результаты измерений, выполненных при помощи инструмента PWD (или другого устройства для измерения давления в скважине, такого как инструмент MWD), используются раскрытым выше способом, калибровочный коэффициент CF может быть точно определен, даже если приток приводит к изменению плотности текучей среды. Это обеспечит улучшенный контроль давления в стволе скважины при использовании инструмента для измерения давления (PWD, MWD и т.д.) в стволе 12 скважины.
На фиг. 5 дополнительно показан пример блок-схемы для способа 100 выявления и уменьшения притока в ствол 12 скважины во время бурения. Способ 100 может использоваться с системой 10 бурения скважин и с системой 90 регулирования давления и расхода, раскрытыми выше, или с другими системами.
На шаге 102 определяют калибровочный коэффициент CF. Уравнение 1 можно использовать для вычисления калибровочного коэффициента CF на основании измеренного давления в стволе 12 скважины (например, при помощи датчиков 60, таких как инструменты PWD или MWD), измеренного давления в кольцевом пространстве 20 на поверхности или вблизи от нее (WHP), гидростатического давления, вычисленного по измеренной плотности текучей среды и фактической вертикальной глубине, а также потерь давления на трение из гидравлической модели 92. Дополнительное описание калибровочного коэффициента CF представлено в патенте США №8240398, переуступленном правообладателю настоящей заявки.
Калибровочный коэффициент CF используется на шаге 104 для вычисления фактических потерь давления на трение. Фактические потери давления на трение (Friction) используются для вычисления требуемого давления в кольцевом пространстве 20 на поверхности или вблизи от нее (WHP), что позволит получить требуемое давление в каком-то месте в стволе 12 скважины. Для этой цели можно использовать Уравнение 2.
На шаге 106 оценивают калибровочный коэффициент CF, определенный на шаге 102. Как обсуждалось выше, относительно высокое значение CF указывает на увеличение жидкостного трения в кольцевом пространстве 20, например, вследствие возросшего количества бурового шлама, частичного обрушения ствола скважины и т.д. Быстрое уменьшение CF указывает на приток в скважину. Способы, известные специалистам, такие как анализ тенденций, нейронные сети, анализ наклона, производные второго порядка и т.д., могут использоваться на шаге 106 для идентификации притока или события другого типа, происходящего или произошедшего.
На шаге 108 плотность текучей среды 18 регулируют с целью уменьшения последствий события, выявленного на шаге 106. Например, если приток выявлен на шаге 106, то на шаге 108 плотность текучей среды 18 (например, удельный вес бурового раствора MW) может постепенно уменьшаться, чтобы вычисленный член Hydrostatic, используемый в Уравнении 2, также уменьшался. Для этой цели можно использовать Уравнение 3. Уменьшение плотности текучей среды 18 соответствует уменьшению плотности в кольцевом пространстве 20 под действие притока, расширения газа и т.д.
Следует отметить, что фактическая плотность текучей среды 18 не уменьшается. Вместо этого, член Hydrostatic, используемый в Уравнении 2, постепенно уменьшается за счет уменьшения удельного веса бурового раствора MW, используемого при вычислении гидростатического давления, поэтому приложенное давление (WHP) в Уравнении 3 постепенно возрастает.
Это возрастающее приложенное давление WHP в конечном счете предотвратит дальнейшее поступление притоков в ствол 12 скважины, в этот момент калибровочный коэффициент CF начнет увеличиваться, и, в результате повторного применения шагов 102, 104 и 108, плотность текучей среды MW, используемая для вычисления члена Hydrostatic в Уравнении 2, увеличится. В конечном счете, калибровочный коэффициент CF следует выровнять, чтобы он был приблизительно равен единице, когда произойдет возвращение к нормальным условиям.
Может оказаться желательным ограничить возрастающее WHP, чтобы, например, предотвратить повреждение хрупкого или чувствительного пласта. В этом случае член Hydrostatic в Уравнении 2 может быть уменьшен только на заданную величину и/или для приложенного WHP может быть установлен заданный максимальный уровень, чтобы давление в стволе 12 скважины в определенном месте не превышало максимальный уровень. Предел приложенного WHP может также (или альтернативно) быть задан для того, чтобы предотвратить повреждение оборудования (например, наземного оборудования регулирования давления и потока).
Если оценка калибровочного коэффициента CF на шаге 106 (например, при помощи анализа тенденций, нейронных сетей, анализа наклона, производных второго порядка и т.д.) указывает на значительный приток в ствол 12 скважины и поэтому следует приступить к регулированию давления в стволе скважины, текучая среда 18 может быть автоматически отведена к противовыбросному оборудованию буровой установки. Например, в схеме, представленной на фиг. 2, поток текучей среды 18 может быть отведен от дроссельного манифольда 32 к дроссельному манифольду буровой установки (например, по дроссельной линии).
В соответствии с увеличением калибровочного коэффициента CF (например, указывающее на возросшее количество бурового шлама, частичное обрушение ствола скважины и т.д.), член Hydrostatic в Уравнении 2 может, наоборот, постепенно увеличиваться. Это, при необходимости, приведет к уменьшению давления, приложенного к стволу 12 скважины на поверхности или вблизи от нее, например, чтобы компенсировать возросший объем бурового шлама в кольцевом пространстве 20 и т.д. Член Hydrostatic может постепенно увеличиваться до тех пор, пока калибровочный коэффициент CF не начнет уменьшаться.
Теперь можно в полной мере понять, что раскрытое выше изобретение обеспечивает значительные улучшения в области регулирования давления в стволе скважины. В одном из приведенных выше примеров калибровочный коэффициент CF используется для вычисления потерь давления на жидкостное трение в стволе 12 скважины, при этом уменьшение калибровочного коэффициента указывает на возникновение притока. Член уравнения, представляющий плотность текучей среды 18, можно постепенно изменять в ответ на выявление заданного изменения калибровочного коэффициента CF, чтобы, например, уменьшить последствия притока.
Приведенное выше раскрытие изобретения предлагает способ бурения скважин для данной области техники. В одном примере способ может содержать следующие шаги: бурение ствола 12 скважины, причем текучая среда 18 циркулирует по стволу 12 скважины во время бурения; определение калибровочного коэффициента CF, применяемого к моделируемым потерям давления на жидкостное трение; и управление бурением на основе, по меньшей мере частично, изменения калибровочного коэффициента CF.
Моделируемые потери давления на жидкостное трение генерируются гидравлической моделью 92.
Увеличение калибровочного коэффициента CF может указывать на увеличение фактического жидкостного трения в стволе 12 скважины. Уменьшение калибровочного коэффициента CF может указывать на уменьшение гидростатического давления в стволе скважины.
Способ может включать в себя подачу сигнала тревоги, когда калибровочный коэффициент CF уменьшается ниже заданного уровня и/или когда калибровочный коэффициент CF уменьшается со скоростью большей, чем заданная.
Шаг управления может включать в себя автоматическое отведение потока текучей среды 18 к дроссельному манифольду буровой установки в соответствии с изменением калибровочного коэффициента CF.
Шаг управления может также включать в себя увеличение давления, приложенного к стволу 12 скважины на поверхности земли или вблизи от нее, в соответствии с изменением калибровочного коэффициента CF. Шаг увеличения давления может предусматривать увеличение давления, приложенного к скважине, до заданного максимального уровня.
Шаг управления может включать в себя постепенное уменьшение члена Hydrostatic в уравнении: WHP=Desired-Friction-Hydrostatic, где WHP - это давление, приложенное к стволу скважины на поверхности земли или вблизи от нее, Desired - это требуемое давление в каком-либо месте ствола скважины, Friction - это жидкостное трение в стволе скважины, a Hydrostatic - это гидростатическое давление в этом месте.
Шаг постепенного уменьшения может включать в себя постепенное уменьшение члена Hydrostatic в соответствии с уменьшением калибровочного коэффициента CF.
Шаг постепенного уменьшения может включать в себя постепенное уменьшение члена Hydrostatic до тех пор, пока калибровочный коэффициент CF не начнет увеличиваться, член WHP не достигнет заданного максимального уровня и/или член Hydrostatic не уменьшится на заданную величину.
Шаг управления может включать в себя, в соответствии с увеличением калибровочного коэффициента CF, постепенное увеличение члена Hydrostatic в уравнении: WHP=Desired-Friction-Hydrostatic, где WHP - это давление, приложенное к стволу скважины на поверхности земли или вблизи от нее, Desired - это требуемое давление в каком-либо месте ствола скважины, Friction - это жидкостное трение в стволе скважины, a Hydrostatic - это гидростатическое давление в этом месте.
Выше раскрыта также система 10 бурения скважин. В одном из примеров система 10 может содержать гидравлическую модель 92, определяющую моделируемые потери давления на жидкостное трение и калибровочный коэффициент CF, применяемый к моделируемым потерям давления на трение; и регулятор потока (такой как дроссель 34), автоматически управляемый в соответствии с изменением калибровочного коэффициента CF.
Хотя выше были раскрыты различные примеры, каждый из которых обладает определенными отличительными признаками, следует понимать, что какой-либо конкретный признак одного примера необязательно использовать исключительно с этим примером. Вместо этого, любые признаки, раскрытые выше и/или изображенные на чертежах, могут комбинироваться с любыми из примеров, в дополнение к любым другим признакам этих примеров, или вместо них. Отличительные признаки одного не являются взаимоисключающими с признаками другого примера. Вместо этого, объем настоящего раскрытия охватывает любую комбинацию любых признаков.
Хотя каждый раскрытый выше пример содержит определенную комбинацию признаков, следует понимать, что необязательно использовать все признаки примера. Вместо этого, любые раскрытые выше признаки могут использоваться без использования любого другого конкретного признака или признаков.
Следует понимать, что различные варианты осуществления, раскрытые в настоящем описании, могут использоваться при различных ориентациях, таких как наклонная, перевернутая, горизонтальная, вертикальная и т.д., и в различных конфигурациях, без отступления от принципов настоящего изобретения. Варианты осуществления раскрыты просто в качестве примеров полезного применения принципов изобретения, не ограничивающихся какими-либо конкретными деталями этих вариантов осуществления.
В приведенном выше описании типичных примеров термины, обозначающие направление (такие как «над», «под», «выше», «ниже» и т.д.), используются для удобства при ссылке на прилагаемые чертежи. Однако следует ясно понимать, что объем раскрытия настоящего изобретения не ограничивается какими-либо конкретными направлениями, раскрытыми в настоящем описании.
Термины «включающий в себя», «включает в себя», «содержащий», «содержит», а также аналогичные термины в настоящем описании используются в неограничивающем смысле. Например, если система, способ, аппарат, устройство и т.д. раскрыты в качестве «включающих в себя» определенный признак или элемент, такая система, способ, аппарат, устройство и т.д. могут включать в себя этот признак или элемент, но могут также включать другие признаки или элементы. Аналогичным образом, термин «содержит» рассматривается как означающий «содержит, но не ограничивается».
Конечно, специалисту, после тщательного рассмотрения раскрытых выше вариантом осуществления настоящего изобретения, будет вполне понятно, что в конкретные варианты осуществления можно внести много модификаций, дополнений, вариантов замены, удалений и других изменений и что такие изменения предполагаются принципами раскрытия настоящего изобретения. Например, конструкции, раскрытые в качестве образуемых отдельно, в других примерах могут быть выполнены как единое целое, и наоборот. Соответственно, следует ясно понимать, что приведенное выше подробное описание представлено только в качестве иллюстрации и примера, при этом существо и объем настоящего изобретения ограничены исключительно прилагаемой формулой изобретения и ее эквивалентами.
Изобретение относится к способу и системе бурения скважин. Техническим результатом является повышение точности регулирования давления в стволе скважины. Способ включает бурение ствола скважины и циркуляцию текучей среды через ствол скважины во время бурения, моделирование потери давления на жидкостное трение, определение калибровочного коэффициента, который применяют к моделируемым потерям давления на жидкостное трение, управление бурением, основанное на изменении калибровочного коэффициента и члена Hydrostatic в уравнении: WHP = Desired - Friction - Hydrostatic, где WHP - давление, приложенное к стволу скважины на или вблизи поверхности ствола скважины, Desired - требуемое давление в каком-либо месте ствола скважины, Friction - фактическое жидкостное трение в стволе скважины, Hydrostatic - гидростатическое давление в стволе скважины. 2 н. и 27 з.п. ф-лы, 5 ил.
1. Способ бурения скважин, включающий:
бурение ствола скважины и циркуляцию текучей среды через ствол скважины во время бурения;
моделирование потери давления на жидкостное трение;
определение калибровочного коэффициента, который применяют к моделируемым потерям давления на жидкостное трение;
управление бурением, основанное на изменении калибровочного коэффициента и члена Hydrostatic в уравнении:
WHP = Desired - Friction - Hydrostatic,
где
WHP - давление, приложенное к стволу скважины на или вблизи поверхности ствола скважины,
Desired - требуемое давление в каком-либо месте ствола скважины,
Friction - фактическое жидкостное трение в стволе скважины,
Hydrostatic - гидростатическое давление в стволе скважины.
2. Способ по п. 1, в котором моделируемые потери давления на жидкостное трение получают с помощью гидравлической модели.
3. Способ по п. 1, в котором увеличение калибровочного коэффициента указывает на увеличение фактического жидкостного трения в стволе скважины.
4. Способ по п. 1, в котором уменьшение калибровочного коэффициента указывает на уменьшение гидростатического давления в стволе скважины.
5. Способ по п. 1, дополнительно включающий подачу сигнала тревоги, когда калибровочный коэффициент уменьшается ниже заданного уровня.
6. Способ по п. 1, дополнительно включающий подачу сигнала тревоги, когда калибровочный коэффициент уменьшается со скоростью, превышающей заданную скорость.
7. Способ по п. 1, в котором управление дополнительно включает автоматическое отведение потока текучей среды к дроссельному манифольду буровой установки в соответствии с изменением калибровочного коэффициента.
8. Способ по п. 1, в котором управление дополнительно включает увеличение давления, приложенного к стволу скважины на или вблизи поверхности ствола скважины, в соответствии с изменением калибровочного коэффициента.
9. Способ по п. 8, в котором увеличение давления дополнительно включает увеличение приложенного к стволу скважины давления до заданного максимального уровня.
10. Способ по п. 1, включающий постепенное уменьшение члена Hydrostatic в соответствии с уменьшением калибровочного коэффициента.
11. Способ по п. 1, включающий постепенное уменьшение члена Hydrostatic до тех пор, пока калибровочный коэффициент не начнет увеличиваться.
12. Способ по п. 1, включающий постепенное уменьшение члена Hydrostatic до тех пор, пока член WHP не достигнет заданного максимального уровня.
13. Способ по п. 1, включающий постепенное уменьшение члена Hydrostatic до тех пор, пока член Hydrostatic не уменьшится на заданную величину.
14. Способ по п. 1, в котором управление дополнительно включает в себя, в соответствии с увеличением калибровочного коэффициента, постепенное увеличение члена Hydrostatic в уравнении:
WHP = Desired - Friction - Hydrostatic,
где
WHP - давление, приложенное к стволу скважины на или вблизи поверхности ствола скважины,
Desired - требуемое давление в каком-либо месте ствола скважины,
Friction - фактическое жидкостное трение в стволе скважины,
Hydrostatic - гидростатическое давление в стволе скважины.
15. Система бурения скважин, содержащая:
гидравлическую модель, выполненную с возможностью определения моделируемых потерь давления на жидкостное трение и калибровочного коэффициента, применяемого к моделируемым потерям давления на жидкостное трение; и
регулятор потока, автоматически управляемый в соответствии с изменением калибровочного коэффициента и члена Hydrostatic в уравнении:
WHP = Desired - Friction - Hydrostatic,
где
WHP - давление, приложенное к стволу скважины на или вблизи поверхности ствола скважины,
Desired - требуемое давление в каком-либо месте ствола скважины,
Friction - фактическое жидкостное трение в стволе скважины,
Hydrostatic - гидростатическое давление в стволе скважины.
16. Система по п. 15, в которой увеличение калибровочного коэффициента является указанием на увеличение фактического жидкостного трения в стволе скважины.
17. Система по п. 15, в которой уменьшение калибровочного коэффициента является указанием на уменьшение гидростатического давления в стволе скважины.
18. Система по п. 15, в которой предусмотрена подача сигнала тревоги при уменьшении калибровочного коэффициента ниже заданного уровня.
19. Система по п. 15, в которой предусмотрена подача сигнала тревоги при уменьшении калибровочного коэффициента со скоростью, превышающей заданную скорость.
20. Система по п. 15, в которой в соответствии с изменением калибровочного коэффициента предусмотрено автоматическое отведение потока буровой текучей среды к дроссельному манифольду буровой установки.
21. Система по п. 15, в которой предусмотрено увеличение давления, приложенного к стволу скважины на или вблизи поверхности ствола скважины, в соответствии с изменением калибровочного коэффициента.
22. Система по п. 21, в которой предусмотрено увеличение давления, приложенного к стволу скважины, до заданного максимального уровня.
23. Система по п. 15, в которой, в соответствии с изменением калибровочного коэффициента, предусмотрено постепенное уменьшение члена Hydrostatic.
24. Система по п. 23, в которой предусмотрено постепенное уменьшение члена Hydrostatic в соответствии с уменьшением калибровочного коэффициента.
25. Система по п. 23, в которой предусмотрено постепенное уменьшение члена Hydrostatic до тех пор, пока калибровочный коэффициент не увеличится.
26. Система по п. 23, в которой предусмотрено постепенное уменьшение члена Hydrostatic до тех пор, пока член WHP не достигнет заданного максимального уровня.
27. Система по п. 23, в которой предусмотрено постепенное уменьшение члена Hydrostatic до тех пор, пока член Hydrostatic не уменьшится на заданную величину.
28. Система по п. 15, в которой, в соответствии с изменением калибровочного коэффициента, предусмотрено постепенное увеличение члена Hydrostatic.
29. Система по п. 28, в которой предусмотрено постепенное увеличение члена Hydrostatic до тех пор, пока калибровочный коэффициент не уменьшится.
| US 6427125 В1, 30.07.2002 | |||
| US 20090312964 А1, 17.12.2009 | |||
| US 20040253734 A1, 16.12.2004 | |||
| US 20110024189 A1, 03.02.2011 | |||
| Регенеративный воздухонагревательный прибор | 1925 |
|
SU7837A1 |

