Изобретение относится к области судовых движителей, а более конкретно к области движителей для подводных аппаратов, и может быть использовано на скоростных, тихоходных и позиционирующих подводных объектах для улучшения их пропульсивных качеств и компенсации кренящего момента, вызванного работой двигательно-движительного комплекса.
Известны судовые движительные комплексы аналогичного назначения. Например, водометный движитель по а. с. 989224/27-11 от 29.11.67 содержит водопроточный канал с осевым насосом, контрпропеллером и обтекателем, у которого водопроточный канал образован с внутренней стороны ступицами осевого насоса и контрпропеллера, а с наружной стороны цилиндрической либо конической поверхностью кольцевого крыла, обращенного выпуклой стороной наружу. При этом водопроточный канал выполняется сужающимся и превышающим осевую протяженность лопастей насоса и контрпропеллера в 1...1,2 раза, а хорда кольцевого крыла устанавливается под углом от 0o до 17o к осевому направлению. Однако, как известно из теории крыла (см., например, Основы теории корабля, А.В. Герасимов, А. И. Пастухов, В.И. Соловьев, М.: Военное издательство МО СССР, 1958 г., 57, стр. 265), на кольцевом крыле возникает подъемная сила, направленная в сторону выпуклой поверхности крыла и перпендикулярная к направлению скорости потока перед крылом. За счет сужения потока в кормовой части подводного аппарата проекция этой силы на ось движителя направлена в сторону, противоположную движению аппарата, и, суммируясь с силой гидродинамического сопротивления кольцевого крыла, дает значительную величину, существенно снижающую пропульсивные качества комплекса.
Более близким к предлагаемому изобретению аналогом является движительный комплекс типа "гребной винт в направляющей насадке", описанный в ряде учебников и монографий (см. , например, Судовые движители, Л.С. Артюшков, А.Ш. Ачкинадзе, А. А. Русецкий, Л. : Судостроение, 1988 г., 59, стр. 245). У движительных комплексов этого типа, принятых в качестве прототипа, насадка представляет собой кольцевое крыло, обращенное выпуклой стороной внутрь проточного канала, образованного ступицей гребного винта и насадкой. При этом отношение длины насадки к диаметру винта составляет 0,6...0,8, а относительное расстояние от входа в насадку до условного диска винта составляет 0,35...0,375 от длины насадки. Преимуществом движительного комплекса, выбранного в качестве прототипа, по сравнению с рассмотренным ранее аналогом является наличие дополнительной силы тяги на направляющей насадке, которая возникает при коэффициенте нагрузки движителя, равном 2,0, и растет с увеличением этого коэффициента. Однако движители этого типа не содержат конструктивных элементов для компенсации кренящего момента, возникающего на корпусе судна или подводного аппарата при работе движительно-двигательной установки, что недопустимо для плавающих объектов с малым коэффициентом остойчивости, каким являются необитаемые и, особенно, скоростные подводные аппараты. Кроме того, движители скоростных подводных аппаратов, как правило, имеют коэффициент нагрузки меньше 1,0, вследствие чего использование на них движителя-прототипа не дало бы положительного эффекта в пропульсивных качествах, а увеличение скоростей в зоне гребного винта, вызванное наличием насадки, привело бы к ухудшению его кавитационных характеристик.
Задачей предлагаемого устройства является повышение пропульсивных качеств одиночного гребного винта при сохранении его кавитационных характеристик и обеспечении компенсации кренящего момента от работы гребного винта.
Для выполнения поставленной задачи проточная часть движителя, состоящего из гребного винта, кольцевой насадки с профилем, обращенным выпуклой стороной внутрь кольца, и устройства для крепления насадки к корпусу, имеющему осесимметричную сужающуюся часть, выполняется в виде кольцевого канала, образованного с внутренней стороны сужающейся частью корпуса аппарата, а с наружной стороны выпуклой частью профиля насадки, причем угол наклона наружной поверхности насадки выбирается на 5o...10o меньше, чем угол наклона образующей корпуса. Гребной винт располагается в выходной части проточного тракта или за его пределами, а устройство для крепления насадки к корпусу выполняется в виде решетки радиально расположенных профилей или пластин, образующих с направлением потока угол 10o...30o, отсчитываемый от направления движения в сторону вращения гребного винта.
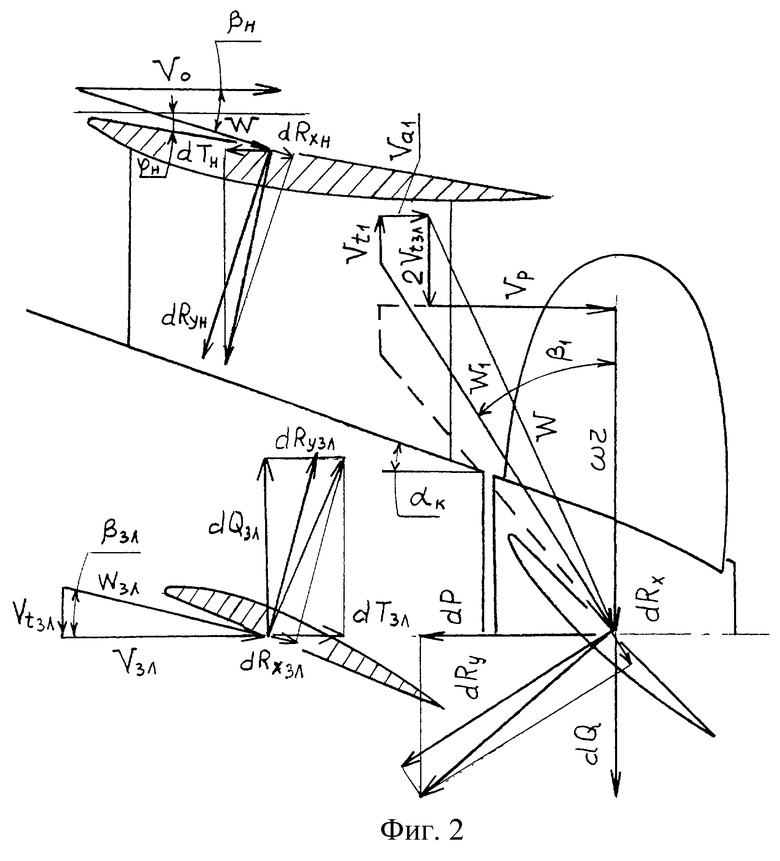
Сущность изобретения пояснена на чертежах, где на фиг.1 показан движительный комплекс для подводного аппарата, а на фиг.2 изображены диаграммы скоростей и сил, возникающих при работе комплекса.
Движительный комплекс содержит гребной винт 1, расположенный за конической кормовой оконечностью корпуса 2 или на ее продолжении, направляющую насадку 3 в виде кольцевого крыла, обращенного выпуклой стороной внутрь насадки, и поддерживающих ее профилированных лопаток 4. Кольцевое крыло располагается над конической оконечностью корпуса, при этом угол конусности наружной поверхности крыла ϕн выбирается меньшим, чем угол конусности корпуса αк. Профилированные лопатки 4 устанавливаются внутренними концами на корпусе, а на их наружных концах крепится насадка 3. Выпуклая сторона лопаток обращена в сторону вращения винта, а плоская или вогнутая образует с осевым направлением положительный угол установки νзл, отсчитываемый от направления движения в сторону вращения винта. При этом угол атаки в каждом сечении лопатки и форма профиля рассчитываются таким образом, чтобы скорость закрутки потока в решетке лопаток была равна скорости закрутки потока в соответствующих сечениях гребного винта. Однако в тех случаях, когда требования к простоте изготовления более значимы, чем требования к коэффициенту полезного действия движителя, закручивающие лопатки могут устанавливаться под постоянным углом установки и иметь постоянную по высоте лопаток форму профиля. При этом необходимый для компенсации момента гребного винта угол установки лопаток определяется расчетным путем либо подбирается экспериментально.
Предлагаемый движительный комплекс функционирует следующим образом (см. фиг. 2). При движении подводного аппарата с конической кормовой оконечностью поле скоростей вблизи кормы имеет осесимметричный характер, при этом линии тока в зоне расположения насадки отклоняются от осевого направления на угол βн, несколько меньший, чем угол конусности корпуса αк. В результате, если угол между хордой насадки и осевым направлением ϕн выбран меньшим, чем угол βн, на профиле насадки возникает положительная подъемная сила, направленная внутрь кольцевой насадки и перпендикулярная направлению скорости. Величина этой силы равна
где ρ - плотность воды,
W - величина скорости потока,
bн - длина хорды профиля насадки,
Су - коэффициент подъемной силы профиля насадки.
Кроме подъемной силы на профиль насадки в направлении скорости  действует сила гидродинамического сопротивления
действует сила гидродинамического сопротивления
Проекция результирующей этих двух сил на осевое направление, просуммированная по окружности насадки, представляет собой силу тяги, развиваемую насадкой. Она равна
Угол конусности кормовой части корпуса αк находится обычно в пределах 10o. . . 20o, что соответствует изменению угла βн в диапазоне 7o...17o. Значения коэффициентов подъемной силы и сопротивления профиля зависят от формы профиля и угла атаки. Проведенные расчеты по формуле (3) показали, что максимум положительной тяги насадки достигается, когда разница между углами конусности корпуса и насадки находится в пределах 5o...10o. При этом тяга, развиваемая насадкой, может составлять до 15...20% от упора гребного винта.
Под действием решетки закручивающих лопаток на них возникает касательная составляющая, или скорость закрутки потока, Vtзл, вследствие чего скорость их обтекания отклоняется на угол βзл от плоскости, проходящей через ось движителя. На профиль лопатки в каждом сечении действует подъемная сила dRузл, перпендикулярная скорости Wзл, и сила сопротивления dRхзл в направлении этой скорости. Проекция результирующей этих сил на осевое направление, просуммированная по радиусу и числу лопаток, создает силу сопротивления закручивающего аппарата
а проекция на боковое направление - касательную силу dQзл, создающую момент
направленный в сторону, противоположную моменту, приложенному со стороны жидкости к гребному винту.
Расчеты показывают, что момент на лопастях закручивающего аппарата, равный моменту на гребном винте на установившемся режиме работы, достигается при угле установки лопаток в пределах 10o...30o в зависимости от числа и ширины лопаток и параметров винта. При этом сопротивление закручивающих лопаток может составлять до 10... 15% от упора гребного винта.
Из теории гидродинамических решеток известно (см., например, Судовые движители, М.М. Жученко, В.М. Иванов, Л.: Судпромгиз, 1956, 5.7, стр. 100), что касательная скорость (скорость закрутки потока) за решеткой принимает значение 2Vtзл. На лопастях вращающегося гребного винта, наряду с осевой, вызванной скоростью, также возникает касательная составляющая Vt1, принимающая за винтом значение Vt2= 2Vt1. Условием оптимальности комплекса "закручивающий аппарат плюс гребной винт" является отсутствие закрутки потока за комплексом. Поэтому для выполнения этого условия скорость Vtзл в закручивающей решетке должна быть равна по величине и противоположна по направлению скорости Vt1 в диске гребного винта. Это может быть достигнуто расчетным путем при проектировании комплекса.
Влияние предварительной закрутки потока с помощью закручивающей решетки профилей на работу гребного винта видно из диаграммы скоростей на лопастях гребного винта, показанной на фиг.2. На элемент лопасти в обращенном движении натекает поток со скоростью W, являющейся геометрической суммой трех составляющих:
- скорости, обусловленной вращением винта ω•z,
- поступательной скорости потока относительно винта Vp,
- скорости закрутки потока закручивающей решеткой профилей 2Vtзл.
Наличие собственных вызванных скоростей гребного винта Va1 и Vt1 приводит к изменению направления относительной скорости, и ее угол с плоскостью вращения становится равным β1. Упор и момент элемента гребного винта определяются формулами

Коэффициент полезного действия элемента лопасти на радиусе г равен
Пунктиром на фиг.2 показана диаграмма скоростей на элементе лопасти без предварительной закрутки потока. В этом случае угол β1 между относительной скоростью вращения был бы значительно больше, чем при наличии закрутки. В то же время из формулы (8) очевидно, что уменьшение угла β1 при прочих равных условиях приводит к росту КПД элемента, а следовательно, и гребного винта в целом. Проведенные расчеты показывают, что это увеличение может составлять величину порядка 10%.
Таким образом, приведенные выше рассуждения показывают следующее:
- расположение насадки в зоне сужающегося потока кормовой оконечности корпуса или мотогондолы и выбор оптимального угла ее конусности обеспечивают возникновение на ней полезной силы тяги даже при малых значениях нагрузки гребного винта;
- использование элементов конструкции крепления насадки на корпусе в качестве закручивающего аппарата обеспечивает возникновение момента, компенсирующего момент крена от работы гребного винта, а также приводит к увеличению КПД последнего, которое полностью или частично компенсирует сопротивление закручивающих лопаток;
- суммарное увеличение КПД предлагаемого движительного комплекса по сравнению с одиночным гребным винтом при одинаковых условиях работы может составлять 15%;
- расположение гребного винта в выходном сечении насадки или за ее пределами не вызывает ускорения потока на элементах винта и, следовательно, не ухудшает его кавитационных характеристик.
Работоспособность предлагаемого устройства и расчетные оценки его эффективности подтверждены лабораторными испытаниями на макетном образце.
В настоящее время разработана методика проектировочного и поверочного расчета движительного комплекса предлагаемого типа, спроектирован и изготовлен опытный образец для скоростного подводного аппарата по одной из тем, разрабатываемых в ЦНИИ "Гидроприбор".
| название | год | авторы | номер документа |
|---|---|---|---|
| Движительный комплекс объекта в водной среде | 2024 |
|
RU2840558C1 |
| Движительный комплекс подводного объекта | 2023 |
|
RU2827383C1 |
| Движительный комплекс надводного судна с подвесным двигателем | 2021 |
|
RU2758525C1 |
| КОЛЬЦЕВОЙ СТАТИЧЕСКИЙ ВЕТРО- И ВОДОДВИЖИТЕЛЬ И УСТРОЙСТВО ВЕТРОЛЕТА, ВОДОЛЕТА И ВОДОХОДА | 1994 |
|
RU2110439C1 |
| СИСТЕМА АКТИВНОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2010 |
|
RU2440277C2 |
| Комбинированный двигательно-движительный комплекс судна | 2015 |
|
RU2617310C2 |
| СУДОВОЙ ДВИГАТЕЛЬ С ГОНДОЛОЙ, УСТАНАВЛИВАЕМОЙ ПОД КОРПУСОМ СУДНА | 2005 |
|
RU2372246C2 |
| ДВИЖИТЕЛЬНО-РУЛЕВОЕ УСТРОЙСТВО | 2014 |
|
RU2556817C1 |
| Судовой движительный комплекс | 1989 |
|
SU1724511A1 |
| ВОДОМЕТНЫЙ ДВИГАТЕЛЬНО-ДВИЖИТЕЛЬНЫЙ КОМПЛЕКС | 2014 |
|
RU2585207C1 |
Изобретение относится к судостроению, а именно к судовым движителям для скоростных, тихоходных и позиционирующих подводных аппаратов. Комплекс содержит гребной винт, насадку в виде кольцевого крыла, обращенного выпуклой стороной внутрь, и устройство для ее крепления на корпусе подводного аппарата или его мотогондолы с сужающейся конической кормовой оконечностью. Проточный кольцевой канал движителя образован с внутренней стороны сужающейся частью корпуса, а с наружной стороны выпуклой частью профиля насадки. Угол конусности наружной поверхности крыла меньше угла конусности корпуса на 5-10o. Гребной винт расположен в выходной части насадки или за ее пределами. Устройство для крепления насадки к корпусу выполнено в виде решетки радиально расположенных закручивающих перед гребным винтом поток лопаток, образующих с осевым направлением угол 10-30o. Изобретение позволяет улучшить пропульсивные качества гребного винта и обеспечить компенсацию кренящего момента от его работы. 2 ил.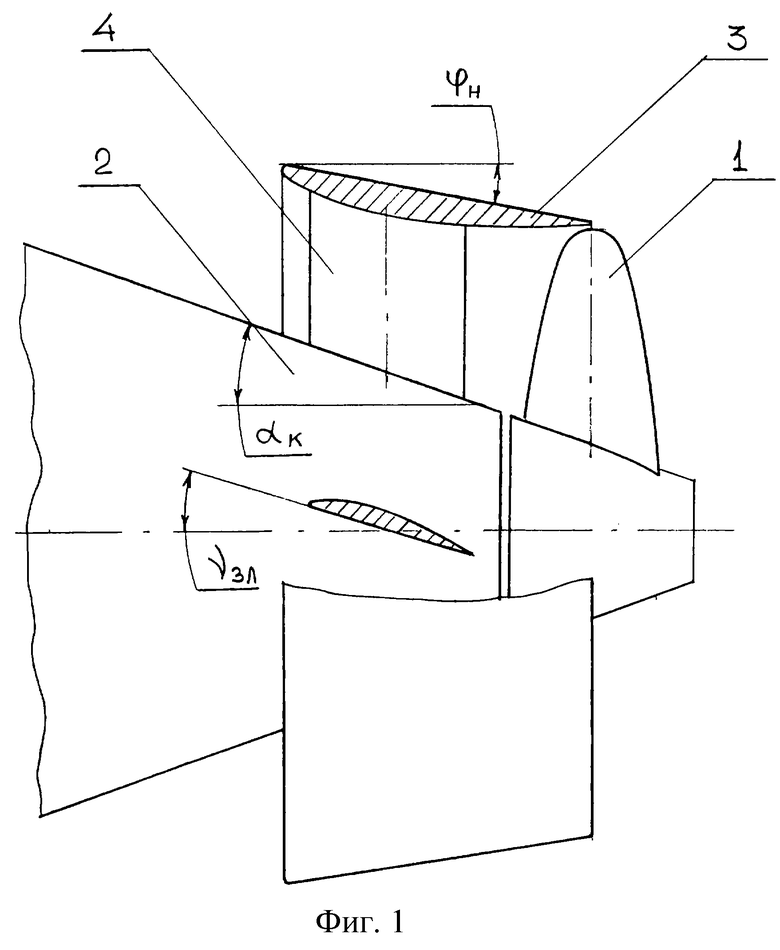
Движительный комплекс для подводного аппарата, содержащий гребной винт, насадку в виде кольцевого крыла, обращенного выпуклой стороной внутрь, и устройство для ее крепления на корпусе подводного аппарата или его мотогондолы с сужающейся конической кормовой оконечностью, отличающийся тем, что проточный кольцевой канал движителя образован с внутренней стороны сужающейся частью корпуса, а с наружной стороны - выпуклой частью профиля насадки, причем угол конусности наружной поверхности крыла меньше угла конусности корпуса на 5-10°, гребной винт расположен в выходной части насадки или за ее пределами, а устройство для ее крепления к корпусу выполнено в виде решетки радиально расположенных закручивающих перед гребным винтом поток лопаток, компенсирующих кренящий момент, возникающий на корпусе подводного аппарата при работе гребного винта, и образующих с осевым направлением угол 10-30°.
| Артюшков Л.С., Ачкинадзе А.Ш., Русецкий А.А | |||
| Судовые движители | |||
| - Л.: Судостроение, 1988, 59, с.245 | |||
| Насадка гребного винта | 1978 |
|
SU694424A1 |
| ' •• ИЗОБРЕТЕНИЯ | 0 |
|
SU367004A1 |
| ИЗГОТОВЛЕНИЕ И СБОРКА ВПИТЫВАЮЩИХ ИЗДЕЛИЙ С МНОЖЕСТВОМ КОМПОНЕНТОВ С НАНЕСЕННОЙ ПЕЧАТЬЮ | 2010 |
|
RU2540596C2 |
| ПРОФИЛИРОВАННАЯ ФОТОЭЛЕКТРИЧЕСКАЯ КРОВЕЛЬНАЯ ПАНЕЛЬ | 2002 |
|
RU2303832C2 |

