Изобретение относится к области устройств для создания аэродинамической подъемной силы (тяги) и может быть использовано для перемещения в воздушном пространстве аппаратов тяжелее воздуха.
Известно устройство для создания тяги в воздушной (водной) среде - это тяговый винт вертолета, гребной винт корабля (см., например, Б.Н. Юрьев. "Аэродинамический расчет вертолетов". Оборонгиз, Москва, 1956 г. Глава 3, стр.50).
Несмотря на широкое использование этого устройства, оно обладает тем недостатком, что практически, с учетом реальных размеров винта, для создания необходимой величины тяги требуются большие затраты мощности. Затрата мощности N характеризуется коэффициентом удельной тяги q, который показывает величину тяги T при затрате мощности в одну лошадиную силу.
 - величина тяги на 1 л.с.
- величина тяги на 1 л.с.
Обычно для вертолетов 
Таким образом, повышение q устройств для создания тяги в воздушной (водной) среде является постоянной проблемой.
Известен летательный аппарат (US 3276723A, 04.10.66). Это устройство наиболее близко по своей технической сущности к предлагаемому (прототип).
Этот аппарат, содержащий движитель, представляющий собой рабочее колесо осевого вентилятора, иначе воздушный винт (пропеллер), лопасти которого представляют собой сложное устройство с аэродинамическим профилем, подобным крылу самолета. Пропеллер помещен в цилиндрической части корпуса летательного аппарата, которая плавно переходит в коническую. Во внутрь конической части корпуса помещен второй конус, в нижней своей части скрепленный с первым тонкими ребрами. Снизу на выходе устройства между конусами размещен третий конус, радиальное сечение которого представляет собой аэродинамический профиль в виде крыла самолета. Таким образом, движителем устройства является воздушный винт и помещенное в отходящий поток крыло, свернутое в кольцо, которое дает эффект увеличения подъемной силы аппарата. Однако воздушный винт, помимо своей сложности (переменные по сечениям лопастей аэродинамические профили), обеспечивает недостаточно большую скорость отбрасывания воздуха, которая в режиме висения не превышает одной пятой окружной скорости конца лопасти (см. цитированную выше книгу Б.Н. Юрьева). По импульсной теории винта его тяга тем больше, чем больше скорость отбрасывания. Можно увеличивать угловую скорость вращения винта для увеличения скорости отбрасывания, но при этом возникает препятствие в виде возрастания сопротивления воздуха и, следовательно, резкого снижения КПД винта. Имея в виду предельную скорость конца лопасти ωR = 300 м/с (близкую к скорости звука), получим максимальную скорость отбрасывания воздуха винтом в режиме висения не более 60 м/с. Здесь ω - угловая скорость вращения, R - радиус лопасти.
В предлагаемом движителе эта скорость может быть значительно больше, и следовательно, может быть получена большая тяга в тех же габаритах при одинаковом объеме отбрасываемой массы. Тем самым можно повысить экономичность полета (увеличить q) и уменьшить габариты (радиус) устройства. Эта задача решается в предлагаемом устройстве благодаря тому, что аэродинамический движитель, содержащий корпус, выполненный из двух частей: верхней - конической с двумя отверстиями в торцах, сверху - меньшего диаметра, а снизу большего, и нижней - дисковой, образующей с верхней частью зазор, верхняя и нижняя части корпуса жестко соединены между собой, а в нижней части корпуса установлена с возможностью вращения втулка рабочего колеса, лопатки рабочего колеса размещены внутри конической части корпуса и выполнены с минимальным зазором относительно ее внутренней поверхности, а рабочие поверхности лопаток установлены перпендикулярно плоскости вращения рабочего колеса.
Такое выполнение устройства позволяет уменьшить радиус ометания вращающихся частей, упростить конструкцию и повысить экономичность полета, т.е. увеличить q.
На фиг. 1 дан продольный разрез предлагаемого устройства.
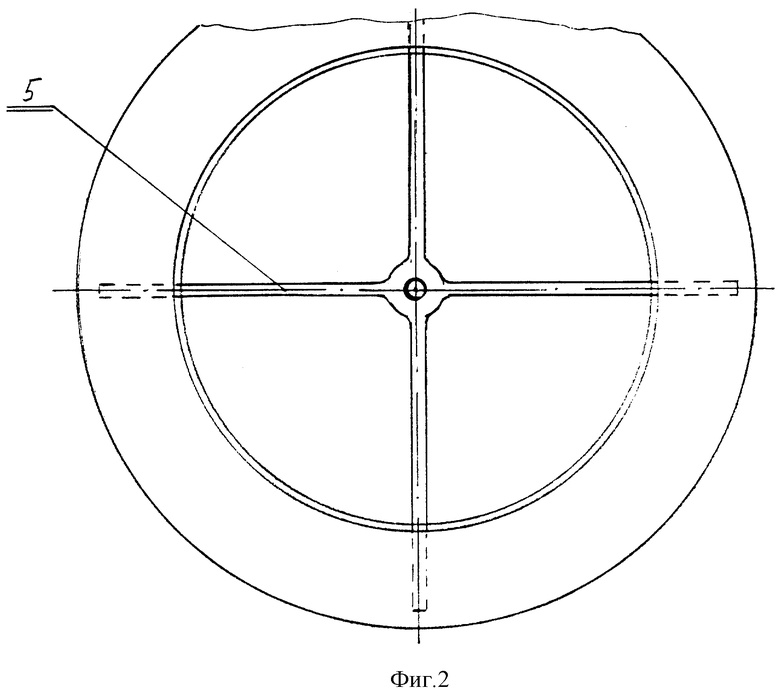
На фиг. 2 - вид сверху.
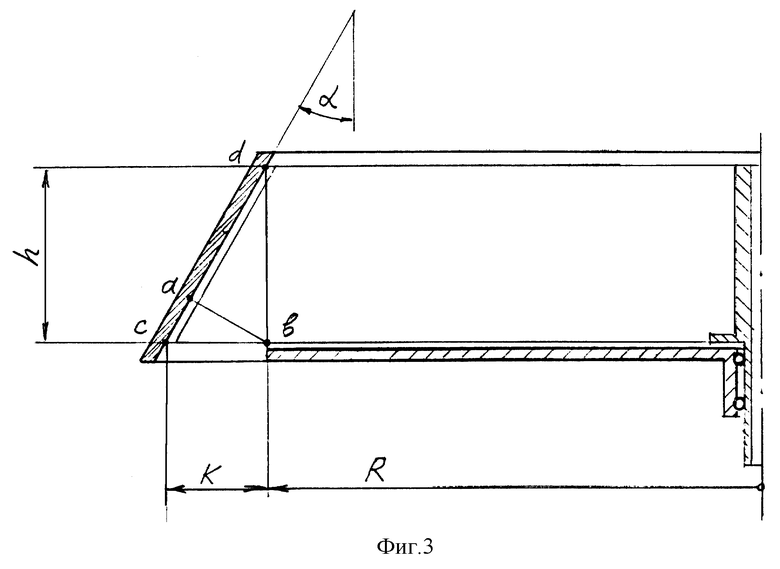
На фиг. 3 - схема геометрических характеристик верхней части корпуса устройства.
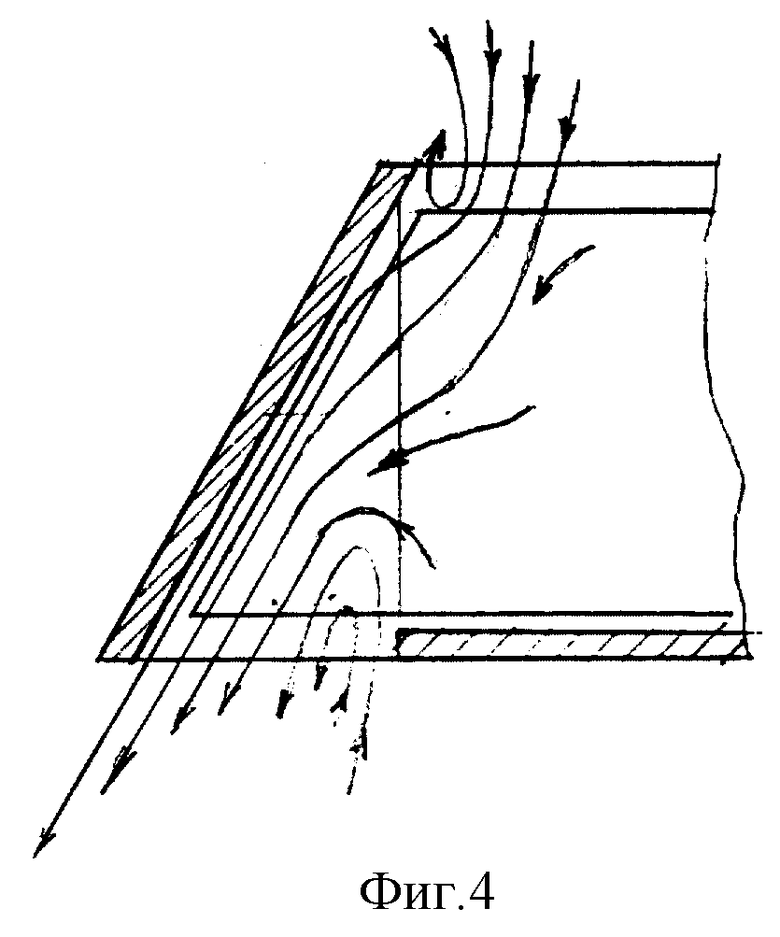
На фиг. 4 - схема обтекания внутренней поверхности конуса потоком (линии тока в относительном движении).
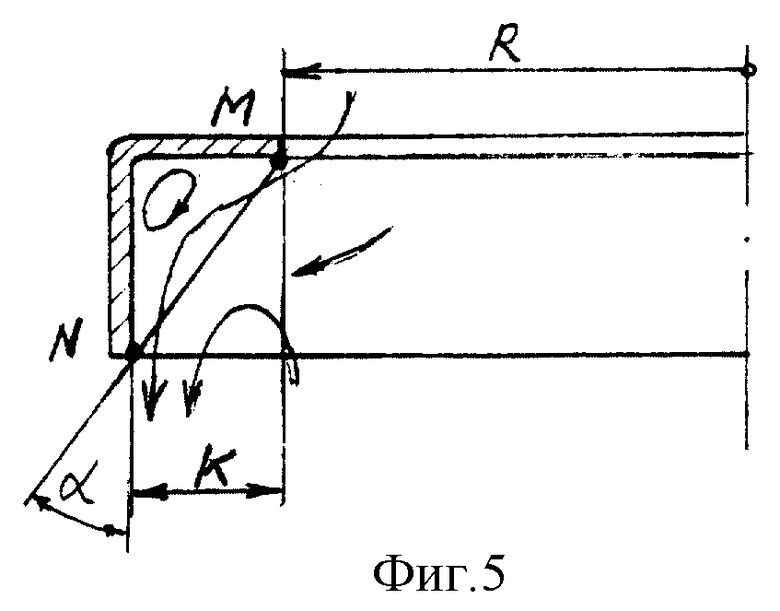
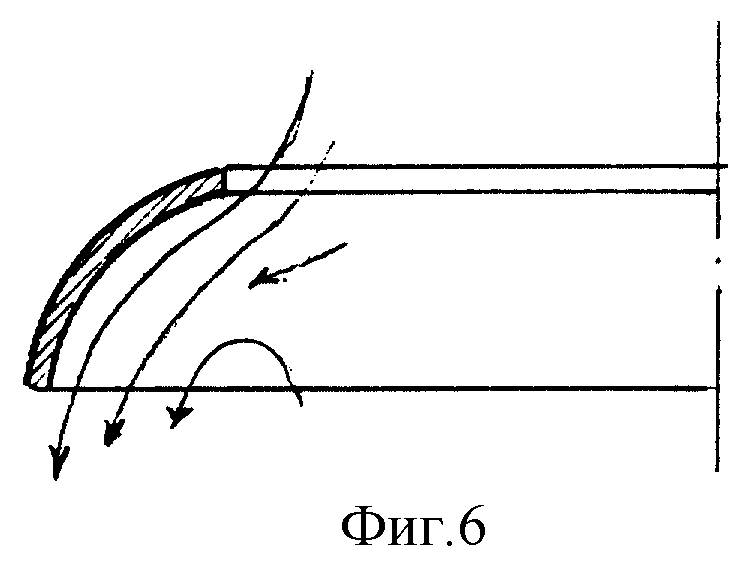
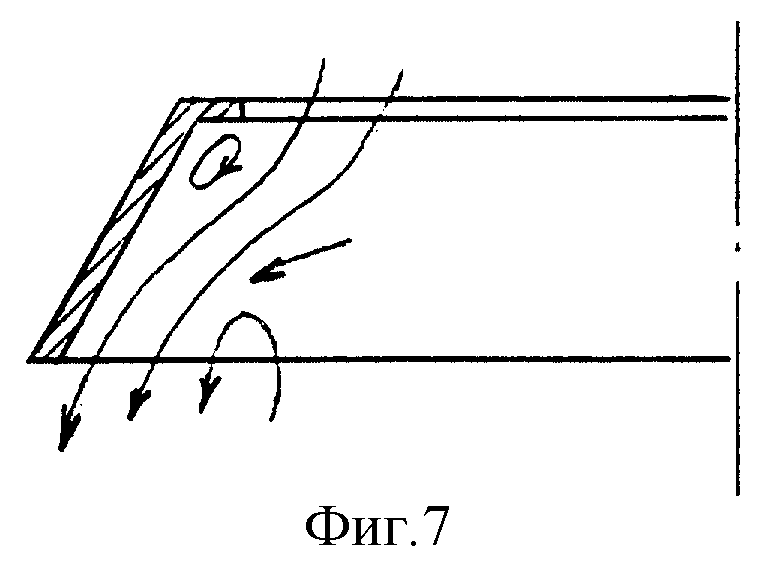
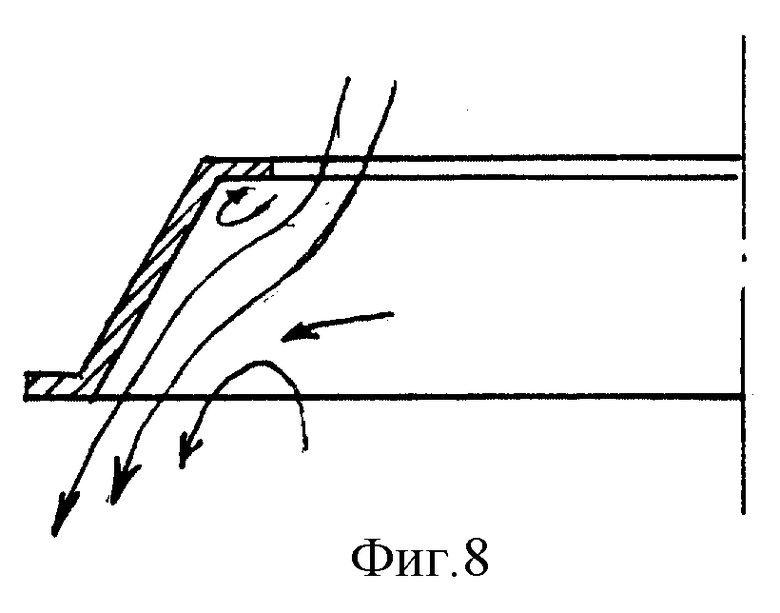
На фиг. 5 - 8 - варианты выполнения верхней части корпуса устройства.
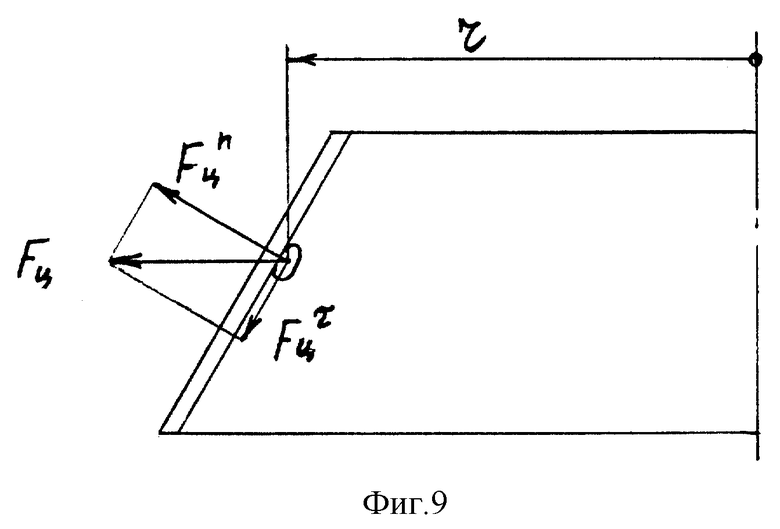
На фиг. 9 - схема для определения силы давления на внутреннюю поверхность конуса.
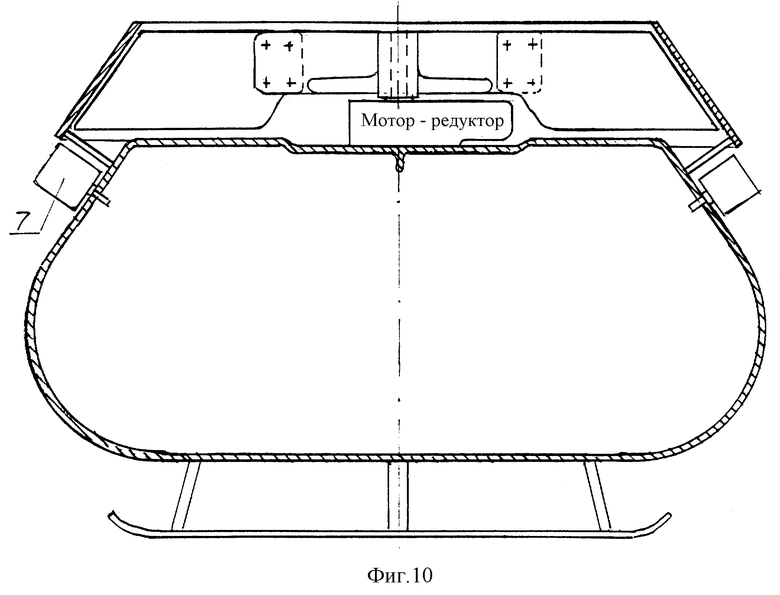
На фиг. 10 - пример использования предлагаемого устройства в летательном аппарате.
Устройство состоит из корпуса, состоящего из двух частей: верхней части 1 и нижней части 2. Эти части жестко скреплены между собой, например, круглыми (обтекаемыми) стержнями 3 или криволинейными ребрами.
Верхняя часть 1 корпуса представляет собой тонкостенный конус с двумя отверстиями в торцах, причем радиус нижнего отверстия больше радиуса верхнего отверстия. Нижняя часть 2 корпуса представляет собой диск, в котором установлена с возможностью вращения втулка 4 рабочего колеса с закрепленными на ней лопатками 5, ширина которых приблизительно равна высоте конуса. Периферийная кромка каждой лопатки выполнена по профилю внутренней поверхности конуса с небольшим зазором (допускающим возможность вращения лопаток). Лопатки - плоские и их рабочие поверхности перпендикулярны плоскости вращения.
Нижняя (дисковая) часть 2 корпуса образует с верхней частью зазор, величина K которого определяется в радиальном направлении точками "b" и "c" (фиг. 3). Точка "b" расположена от центра вращения на радиусе R, а точка "c" является точкой пересечения линии нижней торцовой кромки лопаток с образующей внутреннего конуса
K = bc = htgα;
где h - ширина лопатки;
α - половинный угол при вершине конуса.
Удобно K задавать в частях радиуса K=(0,1-0,4)R. Точка "d" является точкой пересечения верхней торцовой кромки лопаток с образующей конуса и лежит от центра на расстоянии R. Верхнее отверстие конуса также имеет радиус R (во всяком случае весьма близкий к R). Расчетный радиус верхнего отверстия конуса R, а радиус нижнего отверстия (R+K). То, что в действительности он немного более этой величины, объясняется лишь технологическими соображениями и не влияет на подъемную силу устройства. Угол α берется в пределах α = 20÷40°. Нижняя часть корпуса снабжена небольшой конусной отбортовкой 6 с тем, чтобы можно было скрепить ее с верхней частью стержнями 3, равномерно расположенными по окружности. (Эта отбортовка является частью фюзеляжа летательного аппарата, фиг. 10).
В качестве вариантов выполнения устройства вместо конического стакана можно взять цилиндрический стакан (фиг. 5) с отверстиями радиуса R в верхней части и радиуса (R+K) в нижней части, а также любые промежуточные радиальные сечения между упомянутыми коническим и торцово-цилиндрическим сечениями (фиг. 6 - 8).
Устройство работает следующим образом. При вращении втулки 4 с лопатками 5 воздух, находящийся внутри конуса, закручивается. При этом частица воздуха, примыкающая к внутренней поверхности конуса (фиг. 9), находится под действием центробежной силы
Fц= mω2r,
где m - масса частицы, ω - угловая скорость вращения рабочего колеса, r - текущий радиус расположения частицы на внутренней поверхности конуса. Эта сила может быть разложена на силу Fц n, перпендикулярную поверхности конуса, и силу F (ρ - плотность воздуха)
(ρ - плотность воздуха)
(см. , например, книгу К.А. Ушаков и др. "Аэродинамика осевых вентиляторов и элементы их конструкций", Госгортехиздат, Москва, 1960 г.).
Тогда на коническую поверхность давление будет
Подъемная сила устройства
T = P•Sэф,
где Sэф - эффективная площадь конической поверхности (площадь ее проекции на плоскость вращения)
Sэф= π(R+K)2-πR2= πK(2R+K).
Примем  как среднее значение радиуса конической поверхности. Тогда получим
как среднее значение радиуса конической поверхности. Тогда получим
Например, при α = 35° и K=0,3R T = 1,15ρω2R4. (Известно, что винт вертолета имеет тягу Tв= 0,063ρω2R4, см. например, книгу Б.Н.Юрьева, цитируемую выше).
Воздушный поток взаимодействует с внутренней конической поверхностью верхней части корпуса, которая отклоняет его вниз (как показывает опыт при α = 35°) под углом γ ≅ 30° к образующей конуса. Так как абсолютная скорость выхода воздуха является геометрической суммой окружной (переносной) и относительной скоростей (относительная скорость направлена вниз вдоль образующей конуса), то средняя относительная скорость
Площадь сечения S, перпендикулярно которому воздух выходит из конуса, определим приближенно как часть поверхности конуса с образующей "ab". Поток у внутренней поверхности конуса с образующей "cd" сильно сжат. Поэтому берем половину длины "ab". Тогда
Расход Q = Vотн•S.
С учетом распределения относительной скорости по сечению S (в точке "b" она равна нулю, а в точке "a" имеет максимальное значение) следует принять среднее значение 
и, соответственно,
Считаем, что поток выходит из конуса на среднем радиусе выхода
Rвых=R+(K/2),
а входит на среднем радиусе входа
Rвх=R+(K/4).
Тогда
Rвых 2-Rвх 2=R2+RK+ K2/4-R2-RK/2-K2/16 RK/2.
RK/2.
Приложенный к устройству момент определим по формуле об изменении момента количества движения
Соответственно, затрачиваемая мощность будет
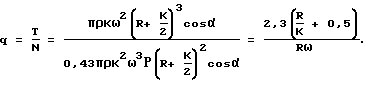
При
K=0,3R 
K=0,2R 
K=0,1R 
Такое значение q дает основание предположить, что использование предложенного устройства позволит получить весьма экономичный полет при малых радиусах ометания (габаритах устройства).
Пример.
Пусть R=4 м, ω = 25 с-1,  K=0,1R, α = 35°.
K=0,1R, α = 35°.
Тогда 
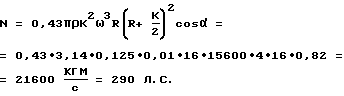
q=T/N=4800/290=16,5 кг/л.с.
Сравним, например, с вертолетом Ми-1, у которого радиус винта Rв=7 м, ω = 23 c-1,  T=2300 кг, N=430 л.с., длина 13 м, q=4 кг/л.с.
T=2300 кг, N=430 л.с., длина 13 м, q=4 кг/л.с.
В случае, если верхняя часть корпуса имеет в радиальном сечении уголковый профиль (торцово-цилиндрический), то по всем конструктивным параметрам устройство аналогично коническому. Действительно, если провести к профилю линию MN, то сходство становится очевидным. Поэтому все приведенные выше вычисления для конуса действительны как для этого случая, так и для промежуточных сечений.
Следует отметить, что подъемная сила создается на корпусе аппарата, не нагружает приводной вал двигателя (редуктора) и не требует использования упорных подшипников.
На фиг. 10 приведен пример использования предложения. Здесь корпус состоит из двух частей: верхней конической и нижней дисковой, переходящей в фюзеляж аппарата. Верхняя приклеплена к нижней с помощью ряда круглых (обтекаемых) стержней. Здесь же на фюзеляже укреплены поворотные лопатки 7, с помощью которых обеспечивается поворот аппарата вокруг вертикальной оси. Для обеспечения пропульсивного способа горизонтального перемещения используются те же лопатки, но они поворачиваются настолько, чтобы перекрыть выходное кольцевое отверстие в передней части аппарата. Тяга в этом месте будет уменьшена, общий вектор тяги смещается относительно центра тяжести аппарата и создается момент, наклоняющий аппарат вперед, после чего образуется горизонтальная составляющая вектора тяги, перемещающая аппарат горизонтально.
В отличие от аналога и прототипа тяга у предлагаемого устройства регулируется угловой скоростью вращения рабочего колеса. Это возможно благодаря использованию вариатора угловой скорости, например, по авторскому свидетельству N 1237839 или другим.
Ввиду того, что вряд ли аппарат с использованием предложенного устройства может опускаться в режиме авторотации, применение его должно быть ограничено низкими высотами полета, не более 5-6 метров, а потому безопасными.
| название | год | авторы | номер документа |
|---|---|---|---|
| АЭРОДИНАМИЧЕСКИЙ ДВИЖИТЕЛЬ | 1997 |
|
RU2118600C1 |
| ГИДРОАЭРОДИНАМИЧЕСКИЙ ДВИЖИТЕЛЬ | 1998 |
|
RU2136539C1 |
| АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2000 |
|
RU2198113C2 |
| АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2003 |
|
RU2240958C1 |
| АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2003 |
|
RU2240261C1 |
| АЭРОДИНАМИЧЕСКИЙ ДВИЖИТЕЛЬ | 2012 |
|
RU2515949C2 |
| СНЕГОХОД | 2005 |
|
RU2279373C1 |
| БЕЗАЭРОДРОМНЫЙ САМОЛЕТ | 2006 |
|
RU2306241C1 |
| АВТОМОБИЛЬ | 2000 |
|
RU2189922C2 |
| ДВИЖИТЕЛЬ | 2001 |
|
RU2214944C2 |
Изобретение относится к области устройств для создания аэродинамической подъемной силы и может быть использовано для перемещения в воздушном пространстве аппаратов тяжелее воздуха. Корпус аэродинамического движителя выполнен из двух частей: верхней конической и нижней дисковой. Коническая часть имеет два отверстия в торцах: сверху - меньшего диаметра, а снизу большего. Дисковая часть образует с конической частью зазор. Верхняя и нижняя части корпуса жестко соединены между собой. В нижней части корпуса установлена с возможностью вращения втулка рабочего колеса, а лопатки рабочего колеса размещены внутри верхней конической части корпуса и выполнены с минимальным зазором относительно ее внутренней поверхности. Рабочие поверхности лопаток установлены перпендикулярно плоскости вращения рабочего колеса. Такое выполнение движителя позволяет уменьшить его габариты и упростить конструкцию. 10 ил.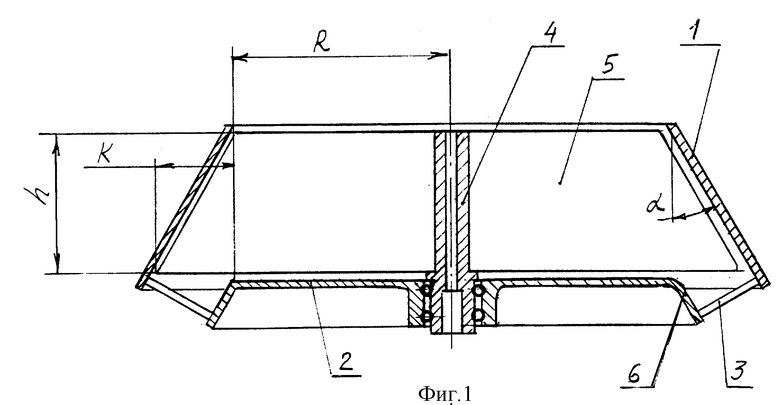
Аэродинамический движитель, содержащий корпус, выполненный из двух частей: верхней конической с двумя отверстиями в торцах, сверху меньшего диаметра, а снизу большего, и нижней дисковой, образующей с верхней частью зазор, верхняя и нижняя части корпуса жестко соединены между собой, в нижней части корпуса установлена с возможностью вращения втулка рабочего колеса, отличающийся тем, что лопатки рабочего колеса размещены внутри конической части корпуса и выполнены с минимальным зазором относительно ее внутренней поверхности, а рабочие поверхности лопаток установлены перпендикулярно плоскости вращения рабочего колеса.
| US 3276723 A, 04.10.1966 | |||
| US 3410507 A, 12.11.1968 | |||
| US 3123320 A, 03.03.1964 | |||
| US 3071334 A, 01.01.1963 | |||
| РУЖИЦКИЙ Е.И.Безаэродромная авиация | |||
| Государственное издательство оборонной промышленности | |||
| Автоматический сцепной прибор американского типа | 1925 |
|
SU1959A1 |

