Уровень техники
Настоящее изобретение относится к области моделирования в реальном времени комплексной системы.
В частности, изобретение применяют в области моделирования окружения двигателя, установленного на летательном аппарате, например на вертолете или самолете.
Как правило, для воспроизведения окружения применяют моделирующее устройство.
В области авиации моделирующие устройства предназначены, в частности, для разработки или доводки новых летательных аппаратов и для тренировки экипажей.
Для моделирования в реальном времени сложных систем известен метод, называемый hardware in the loop, который состоит в подключении бортового вычислительного устройства к инструменту моделирования окружения этого вычислительного устройства, выполненному с возможностью подачи в вычислительное устройство данных, моделирующих один или несколько датчиков летательного аппарата, при этом команды, генерируемые этим вычислительным устройством, вводят на вход инструмента моделирования, который выполнен с возможностью реагирования в зависимости от этих команд и с возможностью изменения входных данных вычислительного устройства.
Внедрение этих систем моделирования требует разработки
специальных электронных плат для генерирования аналоговых сигналов, связанных с каждым из моделируемых датчиков, которые могут быть датчиками самого разного типа: в частности, температурными датчиками, датчиками давления и датчиками скорости.
Изготовление этих электронных плат является дорогим, а их обслуживание сложным, в частности, что касается устранения проблем отклонения.
Объект и сущность изобретения
Задачей изобретения является создание системы моделирования, не имеющей этих недостатков.
Точнее, объектом изобретения является система, содержащая, по меньшей мере, одно цифровое вычислительное устройство, выполненное с возможностью контроля двигателя в летательном аппарате, при этом каждое цифровое вычислительное устройство содержит:
- по меньшей мере, один вход, выполненный с возможностью приема элемента данных, характеризующего состояние датчика;
- по меньшей мере, один выход, связанный, по меньшей мере, с одним приводом; и
- модуль регулирования, выполненный с возможностью отправки, по меньшей мере, одной команды через выходную шину на вышеупомянутый привод в зависимости от данных, принятых на упомянутом, по меньшей мере, одном входе.
Эта система содержит:
- модуль выбора, установленный в упомянутом цифровом вычислительном устройстве и выполненный с возможностью переключения упомянутого входа либо на датчик, либо на шину замены в зависимости от команды оператора;
- устройство моделирования в реальном времени, по меньшей мере, части окружения двигателя и летательного аппарата, при этом устройство моделирования содержит:
- цифровой выход, выполненный с возможностью отправки, по меньшей мере, одного элемента цифровых заменяющих данных через шину замены к входу цифрового вычислительного устройства;
- цифровой вход, соединенный с упомянутым, по меньшей мере, одним выходом цифрового вычислительного устройства и выполненный с возможностью приема команды, выдаваемой цифровым вычислительным устройством, при этом устройство моделирования в реальном времени выполнено с возможностью моделирования реакции двигателя и летательного аппарата на эту команду; и
- модуль контроля, установленный в упомянутом цифровом вычислительном устройстве и выполненный с возможностью осуществления процедуры контроля с целью предотвращения переключения входа цифрового вычислительного устройства на шину замены модулем выбора, когда летательный аппарат совершает полет.
В настоящем документе цифровая шина обозначает любой тип физической связи, через которую могут проходить цифровые данные; например, в рамках изобретения можно использовать шины типа CAN, Ethernet или ARINC.
В частном варианте выполнения цифровой вход и цифровой выход устройства моделирования в реальном времени могут физически находиться на одной двунаправленной шине.
Таким образом, изобретением предлагается связать цифровое вычислительное устройство с устройством моделирования через цифровую шину, а не использовать специальные платы для моделирования различных датчиков.
Цифровые данные, выдаваемые на этой шине и моделирующие различные датчики, можно мультиплексировать.
Согласно изобретению модуль выбора и модуль контроля установлены в цифровом вычислительном устройстве: таким образом, код, применяемый при тестировании, во время фазы моделирования является строго идентичным коду, применяемому на летательном аппарате в полете, при этом отклонены только входы и выходы цифрового вычислительного устройства.
Согласно изобретению заявленная система содержит средства контроля, которые гарантируют, что во время полета летательного аппарата входы цифрового вычислительного устройства подключены к реальным датчикам. Иначе говоря, соединение входов цифрового вычислительного устройства с шиной замены невозможно.
Для этого средства контроля системы в соответствии с изобретением обеспечивают необходимую защиту, чтобы гарантировать, что во время работы летательного аппарата не может произойти случайного включения моделирования.
Благодаря изобретению в фазе моделирования оператор может выбрать для каждого из датчиков переключение входов цифрового вычислительного устройства либо к реальному датчику, либо к шине замены, чтобы заменяющие цифровые данные, генерируемые устройством моделирования в реальном времени, заменяли данные, характеризующие состояние датчиков.
Предпочтительно цифровое вычислительное устройство передает генерируемые им команды через одни и те же выходы, независимо от того, находится оно в режиме моделирования или нет.
В предпочтительном варианте выполнения изобретения заявленная система содержит средства для подключения или отключения выхода цифрового вычислительного устройства к входу модуля регулирования, при этом выход цифрового вычислительного устройства в любом случае всегда соединен с приводом.
В предпочтительном варианте выполнения изобретения модуль выбора применяют при помощи программного модуля, реализующего интерфейс между физическими входами вычислительного устройства и модулем регулирования.
Такой программный модуль известен специалисту под названием API (от английского Application Program Interface).
Этот вариант выполнения представляет особый интерес, так как он позволяет осуществлять разработку модуля регулирования и сертификацию цифрового вычислительного устройства независимо от устройства моделирования в реальном времени.
В предпочтительном варианте выполнения изобретения система содержит два двигателя, каждым из которых управляет цифровое вычислительное устройство.
Этот отличительный признак позволяет моделировать поведение двух двигателей и летательного аппарата.
Краткое описание чертежей
Другие отличительные признаки и преимущества настоящего изобретения будут более очевидны из нижеследующего описания, представленного в качестве неограничительного примера, со
ссылками на прилагаемые чертежи, на которых:
Фиг. 1 - система согласно первому варианту выполнения изобретения, при этом система содержит только один двигатель.
Фиг. 2 - схема архитектуры программного обеспечения цифрового вычислительного устройства системы, показанной на фиг. 1.
Фиг. 3 - вторая система в соответствии с изобретением, содержащая два двигателя.
Фиг. 4 - блок-схема основных этапов процедуры контроля, применяемой в системах, показанных на фиг. 1 и 3.
Подробное описание варианта выполнения
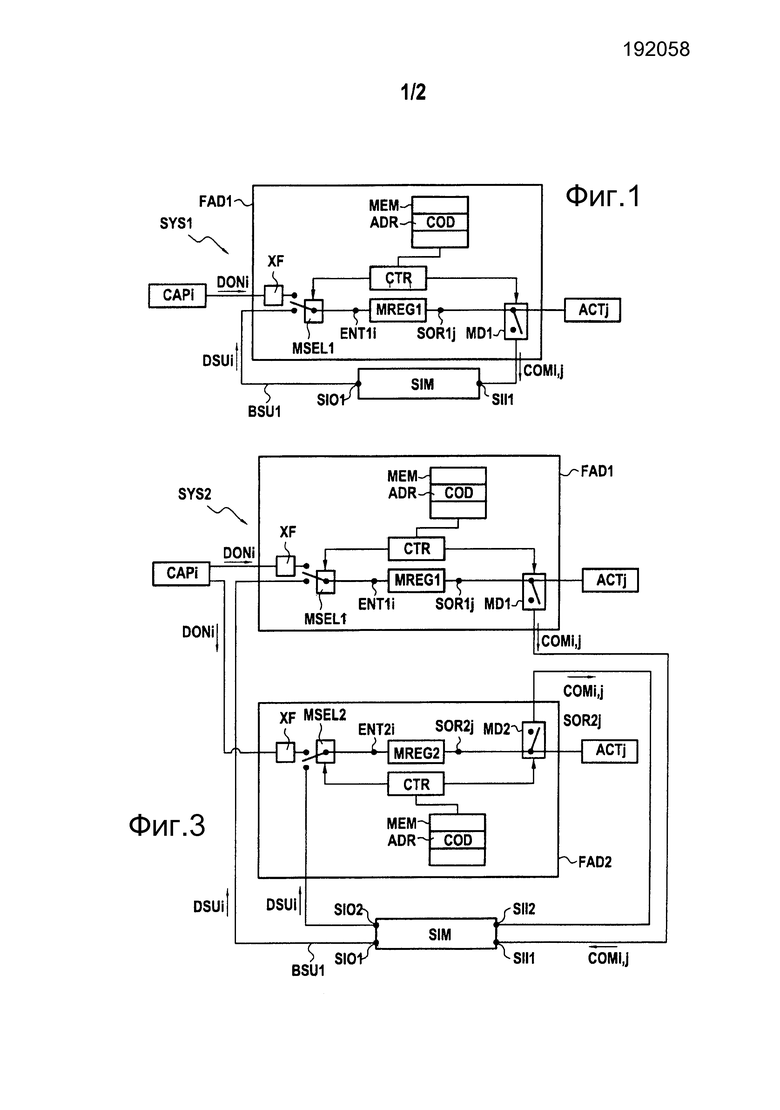
На фиг. 1 показана система SYS1 в соответствии с изобретением.
Эта система содержит цифровое вычислительное устройство FAD1, выполненное с возможностью управления двигателем МОТ1 в летательном аппарате AER, причем этот летательный аппарат и этот двигатель на фигуре не показаны.
Это вычислительное устройство FAD1 содержит множество входов ENT1i, из которых на фигуре показан только один.
Каждый из этих входов ENT1i выполнен с возможностью приема элемента цифровых данных, полученных посредством преобразования элемента аналоговых данных DONi, характеризующего состояние датчика CAP1i двигателя МОТ1 или летательного аппарата AER.
Это преобразование производит модуль XF преобразования, содержащий, в частности, аналого-цифровой преобразователь.
Цифровое вычислительное устройство FAD1 содержит также множество выходов SOR1j, из которых на фигуре показан только один, при этом каждый из выходов SOR1j связан с приводом ACTj двигателя МОТ1 или летательного аппарата AER.
Согласно изобретению система SYS1 содержит также устройство SIM моделирования в реальном времени, выполненное с возможностью моделирования, по меньшей мере, части окружения двигателя МОТ1 и летательного аппарата AER.
Это устройство SIM моделирования содержит выход SIO1, соединенный с цифровой шиной BSU1, называемой шиной замены.
Согласно изобретению система SYS1 содержит модуль MSEL1 выбора, выполненный с возможностью переключения различных входов ENT1i цифрового вычислительного устройства FAP1 либо на датчики CAPi, либо на шину BSU1 замены, соединенную с устройством SIM моделирования в реальном времени.
Переключение может происходить независимо для каждого из датчиков CAPi.
В представленном варианте выполнения цифровое вычислительное устройство FAD1 содержит контроллер CTR, выполненный с возможностью активации или деактивации связи между выходом SOR1j и входом SII1 цифрового устройства моделирования через выключатель MD1.
В представленном примере выполнения модуль выбора MSEL1 контролируют средства контроля CTR по команде оператора.
Следовательно, во время моделирования вход ENT1i может принимать:
- либо элемент данных DONi, характеризующий состояние датчика CAPi;
- либо элемент заменяющих цифровых данных DSUi, генерируемый устройством SIM моделирования в реальном времени.
Цифровое вычислительное устройство FAD1 содержит модуль MREG1 регулирования, выполненный с возможностью отправки через выход SOR1j команды COMi,j на привод ACTj в зависимости от элемента данных, принятого на выходе ENT1i, либо поступившего от датчика CAPi (после цифрового преобразования элемента аналоговых данных DONi), либо поступившего от устройства SIM моделирования (данная DSUi).
Команда COMij принимается приводом ACTj.
Она также принимается на входе SII1 устройства SIM моделирования в реальном времени, если выключатель MD1 находится в замкнутом положении.
В варианте выполнения изобретения оператор может подать команду на цифровое вычислительное устройство FAD1, чтобы оно не учитывало ни одного реального датчика CAPi. В этом случае отчеты о неисправностях, связанных с этими датчиками, маскируются.
В таком варианте выполнения цифровое вычислительное устройство FAD1 все равно стремится задействовать свои выходы, однако ни один из них не соединен с приводами ACTj: в этом случае соответствующие отчеты о неисправностях могут быть принудительно переведены на «нормально».
Значения команд передаются на вход SII1 устройства SIM моделирования в реальном времени.
В этом варианте выполнения устройство моделирования в реальном времени включает в себя компьютерную модель двигателя МОТ1, компьютерную модель летательного аппарата AER и в случае необходимости учитывает реальные бортовые радиоэлектронные средства, но не осуществляет их моделирования.
В другом варианте выполнения оператор может подать команду на цифровое вычислительное устройство FAD1, чтобы учитывать все датчики CAPi, кроме одного, в этом случае маскируется только отчет о неисправностях, связанных с этим датчиком.
В этом случае устройство моделирования в реальном времени включает в себя, по меньшей мере, моделирование этого датчика.
Цифровое вычислительное устройство успешно задействует свои выходы в направлении приводов ACTj, поскольку оператор указал, что все приводы были подсоединены: ни один отчет о неисправностях не маскируется.
В представленном варианте выполнения изобретения значения команд COMi,j, передаваемых на приводы, передаются или нет в устройство SIM моделирования в реальном времени в зависимости от положения выключателя MD1. В фазе моделирования все команды передаются в устройство SIM моделирования в реальном времени, эти команды используются или нет устройством моделирования.
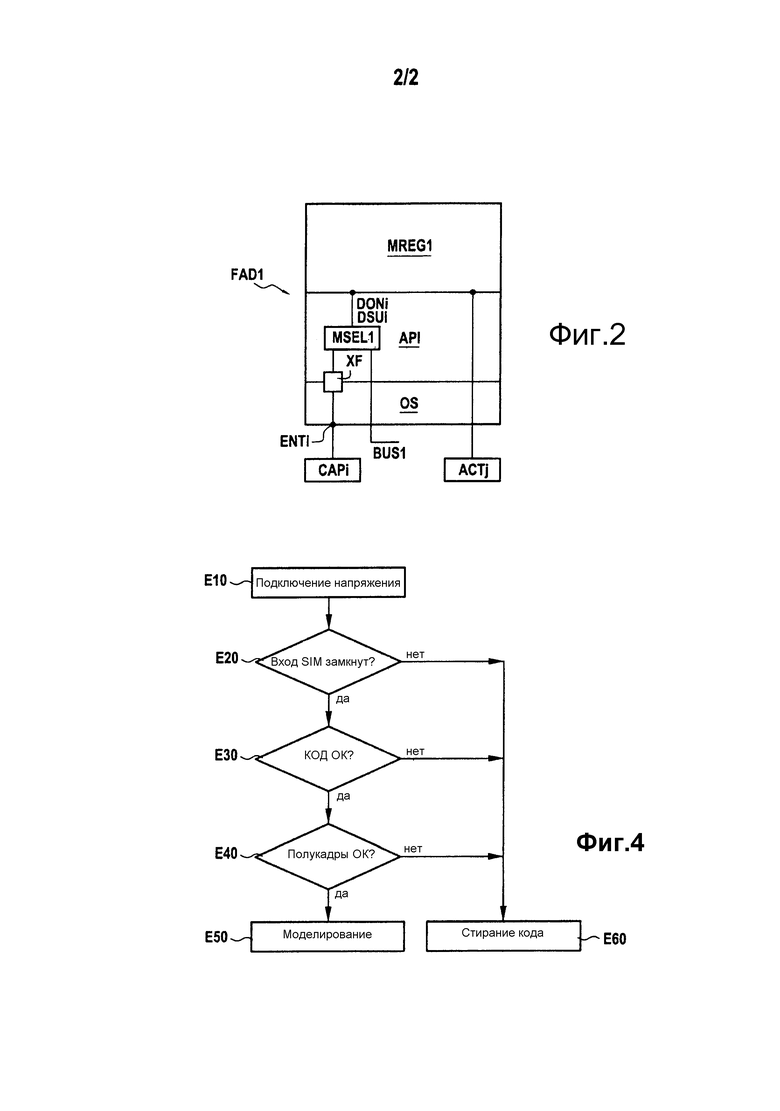
На фиг. 2 схематично показаны слои программы, применяемой цифровым вычислительным устройством FAD1. Речь идет о модели, содержащей три слоя, а именно: нижний слой OS, содержащий операционную систему, управляющую, кроме всего прочего, различными датчиками CAPi и приводами ACTj; верхний слой MREG1, применяющий модуль регулирования и выполненный с возможностью генерирования команд COMi,j на приводы ACTj, в зависимости от данных, принятых на входах ENT1i, и промежуточный интерфейсный слой API между модулем регулирования MRG1 и операционной системой OS, в которой установлен модуль выбора MSEL1.
На фиг. 3 показана система SYS2 в соответствии с изобретением, которая содержит два не показанных двигателя МОТ1, МОТ2, каждый из которых контролируется цифровым вычислительным устройством FAD1, FAD2.
Для второго вычислительного устройства FAD2 использованы аналогичные обозначения.
Эти цифровые вычислительные устройства FAD1, FAD2 связаны друг с другом через межкомпьютерную связь LIF.
В представленном варианте выполнения устройство SIM моделирования в реальном времени включает в себя компьютерные модели двух двигателей МОТ1, МОТ2 и компьютерную модель летательного аппарата AER.
Показанный на фиг. 3 датчик CAPi может быть соединен или нет с каждым из двух цифровых вычислительных устройств FAD1, FAD2, и каждый выход SOR1j, SOR2j может быть соединен или нет с входом SII1, SII2 устройства SIM моделирования в реальном времени.
Разумеется, некоторые датчики могут быть соединены только с одним из двух цифровых вычислительных устройств FAD1, FAD1.
Согласно изобретению цифровые вычислительные устройства FAD1, FAD2 являются абсолютно идентичными во время фазы моделирования и доводки модулей регулирования MREG1, MREG2 и во время эксплуатации летательного аппарата, то есть во время полета.
Разумеется, главным является то, что по соображениям безопасности во время полета летательного аппарата функция моделирования не может быть активирована.
Следовательно, средства контроля CTR осуществляют в каждом из цифровых вычислительных устройств FAD1, FAD2 процедуру контроля, чтобы не допустить переключения входов ENT1i, ENT2i на шины BSU1, BSU2 замены, когда летательный аппарат AER находится в полете.
На фиг. 4 представлен пример процедуры контроля, которую можно применять в системе в соответствии с изобретением.
Эта процедура контроля после подключения напряжения к вычислительному устройству FAD1, FAD2 (этап Е10) содержит этап Е20, в ходе которого проверяют, что вход ENT1i, ENT2i этих вычислительных устройств не связан с шинами BSU1, BSU2 замены устройства SIM моделирования в реальном времени, иначе говоря, что эти входы действительно соединены с датчиками CAPi двигателей или летательного аппарата.
Если это так, то после этапа Е20 следует этап Е30, в ходе которого каждое из вычислительных устройств FAD1, FAD2 проверяет, что определенный адрес ADR памяти МЕМ содержит определенное значение COD.
Если это так, за этим этапом Е30 следует этап Е40, в ходе которого каждое из вычислительных устройств FAD1, FAD2 ожидает заранее определенную последовательность полукадров в течение заранее определенного времени.
Если это происходит, то есть если эти три этапа проверки Е20, Е30, Е40 проходят успешно, можно предусмотреть моделирование, то есть оператор может действительно подключить независимо каждый из входов ENT1i, ENT2i либо к реальному датчику CAPi, либо к устройству SIM1 моделирования в реальном времени через шины BSU1, BSU2 замены.
В представленном варианте выполнения, если, по меньшей мере, один из этапов проверки Е20, Е30, Е40 прошел неудачно, код COD по адресу ADR памяти МЕМ стирается.
Эту процедуру осуществляют при подаче напряжения на вычислительное устройство. Она не допускает никакой несвоевременной активации режима моделирования.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ СЕТЬЮ ЭЛЕКТРИЧЕСКОГО ПИТАНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2013 |
|
RU2646012C2 |
| УСТРОЙСТВО ИМИТАЦИИ ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА ДЛЯ ОТРАБОТКИ ПРОГРАММНОГО И АППАРАТНОГО ОБЕСПЕЧЕНИЯ ПОЛЁТНОГО КОНТРОЛЛЕРА | 2023 |
|
RU2799166C1 |
| СИСТЕМА КОНТРОЛЯ И МОНИТОРИНГА ЛЕТАТЕЛЬНОГО АППАРАТА | 2012 |
|
RU2598497C2 |
| Интегральная система дистанционного обучения пилотированию летательных аппаратов, комплексных испытаний и видеоконференцсвязи | 2018 |
|
RU2703325C1 |
| Комплексная система дистанционного обучения пилотированию летательных аппаратов | 2016 |
|
RU2647345C1 |
| ТЕРМИНАЛ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2537892C1 |
| Стенд подготовки пилотов летательных аппаратов | 2017 |
|
RU2674548C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ РАЗНОРОДНОЙ АРХИТЕКТУРЫ | 2015 |
|
RU2592193C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВООРУЖЕНИЕМ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2014 |
|
RU2551267C1 |
| Система для определения координат цели | 2020 |
|
RU2742944C1 |
Система моделирования в реальном времени окружения двигателя летательного аппарата содержит цифровое вычислительное устройство, устройство моделирования в реальном времени части окружения двигателя и летательного аппарата. Цифровое вычислительное устройство содержит вход приема данных датчиков или летательного аппарата, выход, связанный с приводами двигателя или летательного аппарата, модуль регулирования, модуль выбора. Устройство моделирования содержит цифровые вход и выход, модуль контроля, соединенные определенным образом. Обеспечивается режим моделирования в реальном времени окружения двигателя и летательного аппарата с возможностью его отключения во время полета. 5 з.п. ф-лы, 4 ил.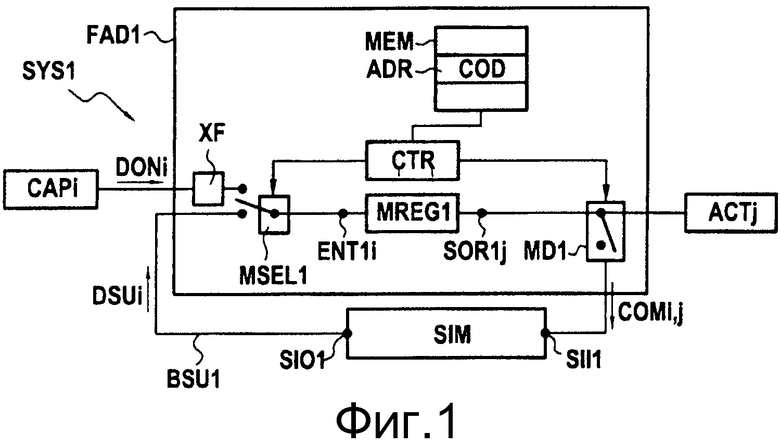
1. Система (SYS1, SYS2) моделирования в реальном времени окружения двигателя летательного аппарата, содержащая, по меньшей мере, одно цифровое вычислительное устройство (FAD1), выполненное с возможностью контроля двигателя (MOT1) в летательном аппарате (AER), при этом каждое цифровое вычислительное устройство (FAD1) содержит:
- по меньшей мере, один вход (ENT1i), выполненный с возможностью приема элемента данных (DONi), характеризующего состояние датчика (CAPi) двигателя или летательного аппарата;
- по меньшей мере, один выход (SOR1j), связанный, по меньшей мере, с одним приводом (ACTj) двигателя или летательного аппарата; и
- модуль (MREG1) регулирования, выполненный с возможностью отправки, по меньшей мере, одной команды (COMi,j) через упомянутый выход (SOR1j) на упомянутый, по меньшей мере, один привод (ACTj) в зависимости от элемента данных (DONi, DSUi), принятого на упомянутом, по меньшей мере, одном входе (ENT1i);
при этом упомянутая система (SYS) отличается тем, что содержит:
- модуль (MSEL1) выбора, установленный в упомянутом, по меньшей мере, одном цифровом вычислительном устройстве (FAD1) и выполненный с возможностью переключения упомянутого входа (ENT1i) либо на упомянутый датчик (CAPi), либо на шину замены (BSU1) в зависимости от команды оператора;
- устройство (SIM) моделирования в реальном времени, по меньшей мере, части окружения упомянутого двигателя (MOT1) и упомянутого летательного аппарата (AER), содержащее:
- цифровой выход (SIO1), выполненный с возможностью отправки, по меньшей мере, одного элемента цифровых заменяющих данных (DSUi) через упомянутую шину замены (BSU) к упомянутому входу (ENTi) упомянутого, по меньшей мере, одного цифрового вычислительного устройства (FAD1);
- цифровой вход (SII1), соединенный с упомянутым, по меньшей мере, одним выходом (SOR1j) цифрового вычислительного устройства (FAD1) и выполненный с возможностью приема упомянутой, по меньшей мере, одной команды (COMi,j), выдаваемой упомянутым, по меньшей мере, одним цифровым вычислительным устройством (FAD1), при этом упомянутое устройство (SIM) моделирования в реальном времени выполнено с возможностью моделирования реакции упомянутого двигателя (MOT1) и упомянутого летательного аппарата (AER) на упомянутую команду (COMi,j); и
- модуль (CTR) контроля, установленный в упомянутом, по меньшей мере, одном цифровом вычислительном устройстве (FAD1) и выполненный с возможностью осуществления процедуры контроля с целью предотвращения упомянутого переключения упомянутого, по меньшей мере, одного входа (ENT1i) цифрового вычислительного устройства (FAD1) на упомянутую шину замены (BSU1) упомянутым модулем выбора (MSEL1), когда упомянутый летательный аппарат совершает полет.
2. Система (SYS1, SYS2) по п. 1, отличающаяся тем, что упомянутый модуль (MSEL) выбора выполнен посредством программного модуля, реализующего интерфейс между упомянутым, по меньшей мере, одним входом (ENTi) и упомянутым модулем (MREG) регулирования.
3. Система (SYS1, SYS2) по п. 1 или 2, отличающаяся тем,
что содержит средства (CTR, MD1j) для подключения или отключения упомянутого выхода (SOR1j), соединенного с упомянутым приводом (ACTj), к входу или от входа (SII1) упомянутого устройства моделирования.
4. Система (SYS2) по п. 1, отличающаяся тем, что содержит два двигателя (MOT1, MOT2) и два цифровых вычислительных устройства (FAD1, FAD2), соединенных между собой при помощи физической связи (LIF), при этом каждое из упомянутых вычислительных устройств (FAD1, FAD2) выполнено с возможностью контроля одного из упомянутых двигателей.
5. Система (SYS1, SYS2) по п. 1, отличающаяся тем, что упомянутую процедуру контроля осуществляют при подаче напряжения (Е10) на упомянутое, по меньшей мере, одно цифровое вычислительное устройство (FAD1, FAD2), при этом упомянутый модуль контроля выполнен с возможностью:
- проверять (Е20), подключен ли упомянутый вход (ENT1i) к упомянутому датчику (CAPi);
- проверять (E30) определенный код (COD) в определенном адресе (ADR) памяти (MEM) упомянутой системы (SYS1, SYS2);
- проверять (E40) прием, по меньшей мере, одного определенного полукадра в течение определенного времени.
6. Система (SYS1, SYS2) по п. 5, отличающаяся тем, что упомянутый модуль контроля содержит средства для стирания упомянутого кода (COD) в случае неудачи, по меньшей мере, одной из упомянутых проверок (E20, E30, E40).
| US 20070202469 A1, 30.08.2007 | |||
| US 5111402 A, 05.05.1992 | |||
| Установка для сжимания газов | 1930 |
|
SU21971A1 |
| US 20090306866 A1, 10.12.2009. | |||

