Изобретение относится к комплексным моделирующим устройствам и предназначено для проведения наземных испытаний аппаратных средств и программно-алгоритмического обеспечения цифровой системы управления летательного аппарата (далее - ЛА). Устройство позволяет проводить наземную отработку функционирования цифровой системы управления ЛА в условиях имитации реального полета.
Известен комплекс (стенд) полунатурного моделирования ЛА типа мультикоптер (Гоголев А.А. Полунатурное моделирование беспилотных ЛА типа мультикоптер. Труды МАИ. Выпуск 2017. № 92), состоящий из вычислительного центра и средств моделирования. Вычислительный центр (далее - ВЦ) осуществляет: расчет математической модели для подготовки навигационных параметров для шестистепенной платформы манипулятора; подыгрыш внешней обстановки (атмосферы); визуализацию результатов математического моделирования; регистрацию навигационных параметров средств моделирования и внутренних параметров математической модели. Средства моделирования выполняют следующие функции: обеспечения динамического подобия с помощью шестистепенной платформы Гью-Стьюарта; имитацию навигационных датчиков (GPS, барометр, компас); визуализацию внешней обстановки с использованием коллиматора для отработки оптических систем; обеспечение управления беспилотным летательным аппаратом (далее - БЛА) типа мультикоптер с помощью центрального вычислителя БЛА. Комплекс позволяет осуществлять отработку систем управления БЛА (в том числе критических режимов), систем управления гиростабилизированным подвесом, отработку измерительных систем и идентификацию характеристик математических моделей.
Недостатком известного комплекса (стенда) полунатурного моделирования ЛА типа мультикоптер являются ограниченные функциональные возможности: использование шестистепенной платформы Гью-Стюарта, которая, как и любая другая подвижная платформа, обеспечивает имитацию движения ЛА с неустранимыми ограничениями и искажениями. Так, ограничения накладываются на длительность ускоряющего воздействия по любой из осей, а искажения возникают из-за необходимости возврата платформы в исходное положение после передачи ускоряющего воздействия.
Известен стенд полунатурного моделирования движения ЛА с цифровой системой управления из патента РФ №2786280 с датой приоритета 06.07.2022, содержащий блок центрального вычислителя летательного аппарата, установленный на подвижной платформе манипулятора, с внутренними инерциальными датчиками, модулем системы управления с модулями навигации и ориентации, наведения, стабилизации, блок рулевых приводов органов управления, блок вычислительного центра стенда с моделью движения и инерциальных датчиков, регистратором данных. Причем модуль модели движения и инерциальных датчиков размещен в модуле системы управления центрального вычислителя летательного аппарата. Выход блока внутренних инерциальных датчиков соединен с первым входом модуля модели движения и инерциальных датчиков. Выход модуля модели движения и инерциальных датчиков соединен с входом модуля навигации и ориентации и первым входом модуля стабилизации. Выход модуля навигации и ориентации соединен с входом модуля наведения. Выход модуля наведения соединен со вторым входом модуля стабилизации. Выход модуля стабилизации соединен с входом блока рулевых приводов. Выход блока рулевых приводов соединен со вторым входом модуля модели движения и инерциальных датчиков модуля системы управления блока центрального вычислителя летательного аппарата. Блок центрального вычислителя летательного аппарата установлен на неподвижном основании.
Недостатком известного стенда полунатурного моделирования движения ЛА с цифровой системой управления является сниженная достоверность результатов испытаний: при проведении моделирования пространственное положение, векторы линейной и угловых скоростей, а также вектор ускорения, определяются программой центрального вычислителя не по показаниям инерциальных датчиков, а из математической модели движения ЛА с учётом известных управляющих воздействий; предложенный способ установления перечисленных критических для управления ЛА величин, фактически, превращает полунатурное моделирование полёта в математическое.
Наиболее близкой по технической сущности является аппаратно-программная платформа стенда полунатурного моделирования для отработки вычислителя беспилотного летательного аппарата, известная из патента РФ №2771111 с датой приоритета 14.10.2021 (прототип), состоящая из рабочего места оператора, кабельной сети, системы электроснабжения и вычислительного комплекса, содержащего модель динамики, модель приводов и имитаторы акселерометра, гироскопа, GPS-датчика, магнитометра, датчика высоты и датчика скорости, функционирующих в операционной системе реального времени. Дополнительно аппаратно-программная платформа стенда полунатурного моделирования содержит вычислитель БЛА, соединенный посредством интерфейсов с вычислительным комплексом. При этом рабочее место оператора выполнено с возможностью подачи на вход вычислительного комплекса управляющих сигналов, содержащих параметры настройки для модели динамики, имитаторов акселерометра, гироскопа, GPS-датчика, магнитометра, датчика высоты и датчика скорости, а также модели приводов. При этом модель динамики выполнена с возможностью передачи информационных сигналов на имитаторы акселерометра, гироскопа, GPS-датчика, магнитометра, датчика высоты и датчика скорости, выходные данные которых, поступая в вычислительный комплекс, кодируются и формируются в сообщения, где на первый вход вычислителя БЛА передаются по интерфейсу выходные данные от имитаторов акселерометра, гироскопа, GPS-датчика, магнитометра, датчика высоты, а на второй вход вычислителя БЛА – данные от имитатора датчика скорости. При этом вычислитель БЛА в соответствии с полученными данными осуществляет стабилизацию руля направления, руля управления, руля отклонения элеронов и тяги и передает управляющие сигналы на модель приводов, откуда значения углов отклонения руля направления, руля управления, руля отклонения элеронов и тяги поступают в модель динамики. Информационные сигналы содержат расчет значений угловых скоростей, ориентации БЛА, географических координат БЛА, значений напряженности магнитного поля в точке местонахождения БЛА, высоты БЛА, значения температуры, разницы давления в приемнике давления датчика и скорости БЛА.
Недостатком известной аппаратно-программной платформы стенда полунатурного моделирования является сниженная достоверность результатов испытаний: некоторые критически важные параметры полёта, а именно пространственная ориентация, векторы линейной и угловых скоростей, а также вектор ускорения, не определяются программой вычислителя БЛА по показаниям инерциальных датчиков, а передаются в готовом виде от вычислительного комплекса; таким образом, тестирование программного обеспечения вычислителя БЛА в части алгоритмов оценки пространственной ориентации и динамики движения ЛА не могут быть протестированы на данном стенде, а требуют натурных (лётных) испытаний.
Техническая проблема заключается в повышении достоверности результатов испытаний при помощи устройства имитации движения летательного аппарата путем осуществления полной имитации работы бортовых приборов и датчиков, подключенных к полётному контроллеру посредством тех же самых интерфейсов, что и в реальном летательном аппарате.
Технические результаты заключаются в:
- обеспечении возможности отработки программного и аппаратного обеспечения полётного контроллера без модификации программного обеспечения (далее – ПО) испытуемого контроллера;
- обеспечении возможности тестирования полётных контроллеров с программным обеспечением с закрытым исходным кодом, что исключает возможность модификации ПО, в том числе с имитацией отказа датчиков, передачей датчиками искажённой информации;
- повышении достоверности реакции полётного контроллера при имитации движения летательного аппарата.
Для целей настоящего описания под реакцией полётного контроллера подразумевается, во-первых, характер и величина воздействия на органы управления летательным аппаратом со стороны контроллера и, во-вторых, информационные сообщения, передаваемые контроллером на наземную систему управления. При этом достоверность описанных реакций означает их идентичность, если имитируемые и реальные условия полёта совпадают. Данная идентичность достигается благодаря подключению бортовых приборов и датчиков к тем физическим интерфейсам, к которым к полётному контроллеру будет подсоединено бортовое оборудование, что позволяет испытывать аппаратное и программное обеспечение полётного контроллера с идентичной полётному режиму вычислительной и информационной нагрузкой.
Данные технические результаты достигаются за счет того, что устройство имитации движения летательного аппарата для отработки программного и аппаратного обеспечения полётного контроллера содержит соединенные рабочее место оператора, вычислительный комплекс, модуль сопряжения, программатор, радиотрансивер и полетный контроллер. Причем рабочее место оператора включает в себя радиоаппаратуру управления, монитор для отображения результатов визуализации движения летательного аппарата и персональный компьютер. Причём рабочее место оператора, вычислительный комплекс и модуль сопряжения соединены друг с другом через локальную вычислительную сеть, а полётный контроллер соединён своими интерфейсами с интерфейсами модуля сопряжения, причём каждый интерфейс модуля сопряжения обслуживается одним или несколькими имитаторами бортовых приборов и датчиков. Кроме того, полётный контроллер через последовательные интерфейсы соединён с радиотрансивером и непосредственно с персональным компьютером, входящим в состав рабочего места оператора; радиотрансивер соединён посредством радиоканала с радиоаппаратурой управления, входящей в состав рабочего места оператора; программатор соединён с модулем сопряжения и с рабочим местом оператора. Вычислительный комплекс выполнен с возможностью моделирования динамики и визуализации движения летательного аппарата; монитор выполнен с возможностью отображения результатов визуализации; полётный контроллер выполнен с возможностью вычисления пространственной ориентации, географического положения и динамических характеристик летательного аппарата на основании показаний бортовых приборов и датчиков; модуль сопряжения выполнен с возможностью имитации бортовых приборов и датчиков путём преобразования данных, поступающих от вычислительного комплекса, и являющихся результатами моделирования динамики, в показания бортовых приборов и датчиков, которые затем предоставляются полётному контроллеру; полетный контроллер выполнен с возможностью выдачи управляющих воздействий на органы управления летательным аппаратом, которые также поступают на модуль сопряжения, где преобразуются соответствующим имитатором в величины отклонения сервоприводов, задаваемую мощность электродвигателей и тому подобные физические величины, которые затем передаются в модель динамики, осуществляемую вычислительным комплексом.
Модуль сопряжения содержит имитаторы, выполненные с возможностью осуществления имитации бортового оборудования, приборов и датчиков, предназначенных для управления движением летательного аппарата.
Структура предложенного устройства, по сравнению с прототипом, в полном объёме предоставляет функционал, присущий изобретению-прототипу при повышении достоверности результатов испытаний, в том числе возможность использования данного устройства имитации движения летательного аппарата для обучения операторов беспилотных летательных аппаратов и отработке навыков пилотирования.
Дополнительные преимущества и существенные признаки настоящего изобретения могут быть представлены в следующих частных вариантах осуществления.
В частности, модуль сопряжения содержит модуль конфигурирования.
В частности, модуль сопряжения может содержать имитатор внешнего запоминающего устройства.
В частности, модуль сопряжения содержит имитатор спутниковой навигационной системы.
В частности, модуль сопряжения содержит имитатор инерциального модуля.
В частности, модуль сопряжения содержит имитатор магнитометра.
В частности, модуль сопряжения содержит имитатор барометрического высотомера.
В частности, модуль сопряжения содержит имитатор датчика давления набегающего потока.
В частности, модуль сопряжения содержит имитатор сервоприводов и электронных регуляторов скорости.
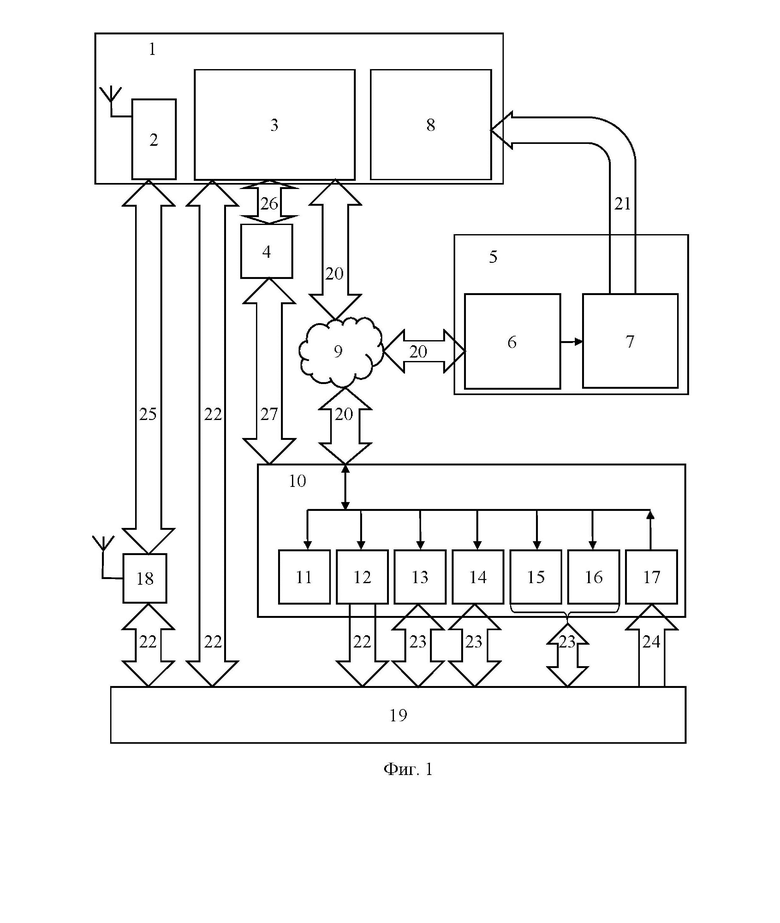
На фиг. 1 представлена структурная схема устройства имитации движения летательного аппарата для отработки программного и аппаратного обеспечения полётного контроллера, где:
1 – рабочее место оператора;
2 – радиоаппаратура управления;
3 – персональный компьютер (далее – ПК);
4 – программатор;
5 – вычислительный комплекс;
6 – модель динамики;
7 – модуль визуализации;
8 – монитор;
9 – локальная вычислительная сеть;
10 – модуль сопряжения;
11 – модуль конфигурирования;
12 – имитатор спутниковой навигационной системы (далее - СНС);
13 – имитатор инерциального модуля;
14 – имитатор магнитометра;
15 – имитатор барометрического высотомера;
16 – имитатор датчика давления набегающего потока;
17 – имитатор сервоприводов и электронных регуляторов скорости;
18 – радиотрансивер;
19 – полётный контроллер;
20 – интерфейс Ethernet;
21 – интерфейс HDMI;
22 – интерфейс UART;
23 – интерфейс I2C;
24 – интерфейс многоканальный широтно-импульсной модуляции (далее - ШИМ);
25 – интерфейс радиоканал;
26 – интерфейс USB;
27 – интерфейс SWD.
Описание осуществления изобретения может быть использовано в качестве примера для лучшего понимания его сущности и изложено со ссылками на фигуру, приложенную к настоящему описанию. При этом приведенные ниже подробности призваны не ограничить сущность изобретения, а сделать ее более ясной.
Устройство имитации движения летательного аппарата для отработки программного и аппаратного обеспечения полётного контроллера состоит из:
- рабочего места оператора (1), включающего в себя радиоаппаратуру управления ЛА (2), персональный компьютер (3), содержащий программное обеспечение, имитирующее наземную систему управления (далее - НСУ) летательного аппарата, программы для управления моделью динамики (6) и модулем визуализации (7), программы для программирования и конфигурации модуля сопряжения (10), и монитор (8) для отображения полёта на местности и поведения ЛА;
- вычислительного комплекса (5), представляющего собой компьютер с операционной системой реального времени, содержащий программное обеспечение, обеспечивающее функционирование модели динамики (6) и модуля визуализации (7);
- модуль сопряжения (10), состоящий из одной или нескольких плат, содержащих микроконтроллер с широким набором коммуникационных интерфейсов (Ethernet (20), UART (22), I2C (23), ШИМ (24), а также не представленные на фиг.1 USB, SPI, CAN), аналого-цифровыми (далее - АЦП) и цифро-аналоговыми (далее - ЦАП) преобразователями (не представлены на схеме), специализированным интерфейсом для программирования (SWD (27), не представленный на схеме JTAG) при помощи программатора (4); программное обеспечение, загруженное в микроконтроллеры, включает в себя модуль конфигурирования (11), имитаторы: спутниковой навигационной системы (12), инерциальной системы (13), магнитометра (14), барометра (15), датчика давления набегающего потока (16), сервоприводов (17); возможно добавление имитаторов других датчиков, приборов и оборудования;
- локальной вычислительной сети (9), имеющей интерфейсы Ethernet, обеспечивающей связь:
а) рабочего места оператора (1) с вычислительным комплексом (5);
б) рабочего места оператора (1) с модулем сопряжения (10);
в) вычислительного комплекса (5) с модулем сопряжения (10);
- полётного контроллера (19), являющегося объектом испытаний;
- специализированной кабельной сети для соединения персонального компьютера (3), модуля сопряжения (10) и радиомодема (18) с полётным контроллером (19);
- системы электроснабжения для обеспечения электропитанием всех перечисленных электронных устройств (не представлена на схеме).
Управление моделированием динамики (6) и визуализацией (7) полёта осуществляется с персонального компьютера (3) на рабочем месте оператора (1) через интерфейс Ethernet (20) по протоколу TCP/IP; обмен пакетами данных обеспечивается локальной вычислительной сетью (9). Отображение визуализации (7) полёта осуществляется на мониторе (8), подключенном к вычислительному комплексу (5) посредством интерфейса HDMI (21).
Программирование микроконтроллеров модуля сопряжения (10) осуществляется с персонального компьютера (3) через интерфейс SWD (27) посредством программатора (4), подключенного к персональному компьютеру (3) через интерфейс USB (26).
Конфигурирование модуля сопряжения (10) осуществляется с персонального компьютера (3) через интерфейс Ethernet (20) по протоколу UDP/IP; доставку конфигурационных пакетов обеспечивает локальная вычислительная сеть (9). Конфигурирование модуля сопряжения (10) включает в себя выбор для имитации конкретных моделей оборудования, приборов и датчиков, их сопоставление с имеющимися интерфейсами, а также задания параметров имитации и параметров интерфейса для каждого модуля, если требуется.
На модуле сопряжения (10) возможна имитация практически неограниченного набора бортового оборудования; например, если полётный контроллер (19) имеет интерфейс для подключения внешних запоминающих устройств, предназначенных для периодической записи параметров полёта («чёрных ящиков»), в модуле сопряжения (10) может быть программно реализован имитатор внешнего запоминающего устройства, обслуживающий аппаратный интерфейс, идентичный интерфейсу реального устройства, подключенный к полётному контроллеру (19); поступающие данные могут сохраняться как во внутренней энергонезависимой памяти модуля с возможностью последующего чтения, так и немедленно передаваться через локальную вычислительную сеть на персональный компьютер оператора (3). Модуль сопряжения построен таким образом, что в случае недостаточности ресурсов одной платы с микроконтроллером, он легко может быть расширен путём установки дополнительных плат с тем же самым или иным аппаратным составом. Программирование плат может осуществляться с персонального компьютера оператора (3) при помощи одного или нескольких различных программаторов, совместимых с платами модуля сопряжения (10).
Радиоаппаратура управления (2), входящая в состав рабочего места оператора (1), создаёт радиоканал для связи с радиотрансивером (18), подключенным по интерфейсу UART (22) к полётному контроллеру (19), с использованием протокола CRSF, обеспечивающего передачу команд управления на полётный контроллер (19) и приём от него данных телеметрии. Программа имитации НСУ, установленная на персональный компьютер (3), также осуществляет передачу команд управления в полётный контроллер (19) и принимает от него данные телеметрии; подключение осуществляется по интерфейсу UART (22) с использованием протокола MAVLINK; данный канал управления летательным аппаратом в штатных условиях будет организован по второму радиоканалу, организованному между двумя трансиверами, которые в существующей схеме подключения не используются.
Модель динамики (6), работающая на вычислительном комплексе (5) передаёт на модуль сопряжения (10) результаты моделирования через интерфейс Ethernet (20) по протоколу UDP/IP; при этом каждому имитируемому прибору или датчику соответствует отдельный UDP порт, назначаемый при конфигурации. Отправляемые данные соответствуют потребностям имитаторов. Так для имитатора спутниковой навигационной систем (12) передаются вычисленные значения географических координат ЛА (широта, долгота) в градусах, его высоты над уровнем геоида в метрах и три компоненты вектора скорости (на север, на восток и вниз) в метрах в секунду. Для имитатора инерциального модуля (13) передаются значения угловых скоростей относительно продольной, поперечной и вертикальной осей ЛА в радианах в секунду, а также линейные перегрузки (ускорения) вдоль этих же осей в м/с2 (метрах в секунду за секунду). Для имитатора магнитометра (14) передаются вычисленные значения напряжённости магнитного поля по продольной, поперечной и вертикальной осей ЛА в нано-Теслах. Для имитатора барометрического высотомера (15) передаются вычисленные данные атмосферного давления в паскалях и температуры воздуха в градусах Цельсия. Для имитатора датчика дифференциального давления набегающего воздушного потока (16) передаются вычисленные значения разности давления потока и атмосферного давления в паскалях и температуры набегающего воздуха в градусах Цельсия.
Модуль сопряжения (10) соединён с полётным контроллером (19) посредством интерфейсов UART (22), I2C (23) и многоканальным ШИМ (24), в соответствии с конфигурацией, сохранённой в энергонезависимой памяти микроконтроллера; при этом каждый из используемых интерфейсов соответствует определённому имитатору (1217). Имитатор сервоприводов и электронных регуляторов скорости (17), фиксирует продолжительности импульсов по каждому из каналов ШИМ (24), преобразует эти данные в угловые отклонения сервоприводов, или значения потребляемой мощности двигателей, и передаёт вычисленные значения через интерфейс Ethernet (20) по протоколу UDP/IP в вычислительный комплекс (1); при этом UDP порт, количество, назначение и порядок следования каналов управления задаются конфигурацией, сохраняемой в энергонезависимой памяти; модель динамики (6) на основании полученных значений осуществляет моделирование динамики летательного аппарата и корректирует данные о его положении, ориентации, угловых скоростях, векторах скорости и ускорения.
В описываемом варианте осуществления изобретения использовалось следующее оборудование:
- радиоаппаратура управления (2) – Radiomaster TX16S;
- программатор (4) – Segger JLink;
- вычислительный комплекс (5) – КПМ РИТМ;
- модуль сопряжения (10) – плата XCore407i;
- радиотрансивер (18) – ExpressLRS.
В программном обеспечении модуля сопряжения были реализованы имитаторы следующих приборов и датчиков:
- спутниковая навигационная система (12) – неспецифицированный модуль спутниковой навигации с поддержкой протокола NMEA-0183;
- инерциальный модуль (13) – ICM-20689;
- магнитометр (14) – IST-8310;
- барометрический высотомер (15) – MS-5611;
- дифференциальный датчик давления (16) – DLVR-L10D;
- сервоприводы (17) – DS-239HV.
Испытывались полётные контроллеры Pixhawk-4 и CUAV-X7 с программой Ardupilot; программное обеспечение не модифицировалось, использовалось одно и то же, как при полунатурном моделировании, так и в последующих лётных испытаниях.
Функционирование заявляемого устройства имитации движения летательного аппарата для отработки программного и аппаратного обеспечения полётного контроллера происходит следующим образом.
Вначале оператор запускает программу конфигурации модуля сопряжения на ПК (3), затем подаёт питание на модуль сопряжения (10). Модуль сопряжения (10) при старте программного обеспечения передаёт через интерфейс Ethernet (20) на фиксированный UDP порт с широковещательным IP адресом параметры своей конфигурации, которые принимаются и визуализируется программой на ПК (3) оператора. Если версия или состав программного обеспечения модуля сопряжения (10) не соответствуют требуемым, оператор загружает подходящую версию ПО в микроконтроллер модуля сопряжения (10) через программатор (4); загруженное ПО стартует и передаёт параметры своей конфигурации. Если требуется коррекция конфигурации, оператор изменяет соответствующие параметры и отправляет на модуль сопряжения (10).
Затем с рабочего места оператора (1) происходит настройка параметров модели динамики (6) и задание начальных параметров движения ЛА.
После запуска имитации с рабочего места оператора (1) происходит загрузка программного обеспечения на вычислительный комплекс (5) и его запуск в операционной системе реального времени. Вычислительный комплекс (5) выполняет цикл операций и начинает отправку данных через интерфейс Ethernet (20) по протоколу UDP на установленный IP адрес модуля сопряжения (10) на UDP порты, соответствующие имитаторам (12–16). После этого оператор включает радиоаппаратуру управления (2) и подаёт питание на полётный контроллер (19), который опрашивает свои интерфейсы с целью обнаружения подключенного бортового оборудования. Результат этого процесса оператор может наблюдать как в программе, имитирующей НСУ, которая принимает данные телеметрии, так и в программе конфигурирования модуля сопряжения, которая принимает данные о статусе имитаторов. На мониторе визуализации (8) оператор может наблюдать положение и ориентацию изображения летательного аппарата на местности.
Далее оператор может загрузить в полётный контроллер (19) полётное задание при помощи программы, имитирующей НСУ, через интерфейс UART (22) по протоколу MAVLINK, либо при помощи радиоаппаратуры управления (2) передать желаемые управляющие воздействия на органы управления ЛА в полётный контроллер (19) через радиоканал (25), который автоматически устанавливается между радиоаппаратурой управления (2) и радиотрансивером (18) при их включении; команды управления передаются радиотрансивером (18) в полётный контроллер (19) через интерфейс UART (22) по протоколу CRSF.
Полётный контроллер (19) формирует сигналы ШИМ (24) для управления сервоприводами и двигателями; модуль сопряжения (10) принимает эти сигналы, преобразует, упаковывает и отправляет их в соответствии с конфигурацией имитатора сервоприводов и электронных регуляторов скорости (17). Модель динамики (6) принимает данные отклонения сервоприводов и мощности двигателей, на их основании изменяет параметры ЛА, которые затем передаёт в имитаторы бортового оборудования (1216). Каждый имитатор, в соответствии со своей конфигурацией, преобразует полученные данные в значения и формат соответствующих приборов и датчиков, которые затем поступают в полётный контроллер (19) по его запросам через интерфейс I2C (23), либо периодически, через интерфейс UART (22) от имитатора СНС по протоколу NMEA-0183.
Изменение положения и ориентации ЛА отображается в программе СНС на ПК (3) оператора, на экране радиоаппаратуры управления (2) по данным телеметрии в виде показаний приборов приборной панели ЛА, а также на мониторе визуализации (8) в виде изображения ЛА в динамике на местности.
Процесс имитации будет продолжаться до тех пор, пока не будет остановлен на рабочем месте (1) оператора, путем передачи специальных управляющих сигналов на вычислительный комплекс, либо путем выключения вычислительного комплекса (5). В результате проведенного моделирования на мониторе рабочего места (1) оператора будут отображены графики изменения значений величин, выбранных оператором перед запуском моделирования, от времени. Полученные значения могут быть сохранены в файл для последующего анализа.
Стоит отметить, что программа, управляющая модулем сопряжения, установленная на персональный компьютер, входящий в состав рабочего места оператора, позволяет конфигурировать модуль сопряжения для внесения в показания имитируемых приборов и датчиков случайные и систематические погрешности, свойственные имитируемым приборам и датчикам, а также имитировать потерю пакетов, кратковременный или стойкий отказ приборов и датчиков, что также вероятно во время полёта. Приём пакетов телеметрии, поступающих от полётного контроллера на персональный компьютер в составе рабочего места оператора, позволяет в реальном времени отслеживать поведение полётного контроллера и его реакцию на искажение данных, потерю пакетов, отказы бортового оборудования. Запись пакетов телеметрии на персональный компьютер позволяет анализировать работу алгоритмов программного обеспечения полётного контроллера по окончании имитации движения летательного аппарата.
Таким образом, возможность отработки программного и аппаратного обеспечения полётного контроллера без модификации программного обеспечения испытуемого контроллера, возможность тестирования полётных контроллеров с программным обеспечением с закрытым исходным кодом и повышение достоверности реакции полётного контроллера при имитации движения летательного аппарата достигаются за счет того, что предлагаемое устройство имитации движения летательного аппарата для отработки программного и аппаратного обеспечения полётного контроллера содержит соединенные рабочее место оператора, вычислительный комплекс и полетный контроллер. Причем рабочее место оператора включает в себя персональный компьютер. Вычислительный комплекс выполнен с возможностью моделирования динамики и визуализации движения летательного аппарата. Монитор выполнен с возможностью отображения результатов визуализации. Устройство дополнительно содержит модуль сопряжения, программатор и радиотрансивер. Рабочее место оператора дополнительно включает в себя радиоаппаратуру управления, монитор для отображения результатов визуализации движения летательного аппарата. Причём рабочее место оператора, вычислительный комплекс и модуль сопряжения соединены друг с другом через локальную вычислительную сеть, а полётный контроллер соединён своими интерфейсами с интерфейсами модуля сопряжения, причём каждый интерфейс модуля сопряжения обслуживается одним или несколькими имитаторами бортовых приборов и датчиков. Полётный контроллер через последовательные интерфейсы соединён с радиотрансивером и непосредственно с персональным компьютером, входящим в состав рабочего места оператора. Радиотрансивер соединён посредством радиоканала с радиоаппаратурой управления, входящей в состав рабочего места оператора. Программатор соединён с модулем сопряжения и с рабочим местом оператора. Полётный контроллер выполнен с возможностью вычисления пространственной ориентации, географического положения и динамических характеристик летательного аппарата на основании показаний бортовых приборов и датчиков. Модуль сопряжения выполнен с возможностью имитации бортовых приборов и датчиков путём преобразования данных, поступающих от вычислительного комплекса, и являющихся результатами моделирования динамики, в показания бортовых приборов и датчиков, которые затем предоставляются полётному контроллеру. Полетный контроллер выполнен с возможностью выдачи управляющих воздействий на органы управления летательным аппаратом, которые также поступают на модуль сопряжения, где преобразуются соответствующим имитатором в величины отклонения сервоприводов, задаваемую мощность электродвигателей и тому подобные физические величины, которые затем передаются в модель динамики, осуществляемую вычислительным комплексом. Модуль сопряжения содержит имитаторы, выполненные с возможностью осуществления имитации бортового оборудования, приборов и датчиков, предназначенных для управления движением летательного аппарата. Модуль сопряжения содержит имитаторы, выполненные с возможностью осуществления имитации бортового оборудования, приборов и датчиков, предназначенных для управления движением летательного аппарата.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАЗЕМНОЙ ИМИТАЦИИ ПОЛЕТА КОСМИЧЕСКИХ АППАРАТОВ В КОСМОСЕ | 2012 |
|
RU2527632C2 |
| Аппаратно-программная платформа стенда полунатурного моделирования для отработки вычислителя беспилотного летательного аппарата | 2021 |
|
RU2771111C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК СИСТЕМЫ САМОНАВЕДЕНИЯ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2024 |
|
RU2830544C1 |
| УСТРОЙСТВО ПРОГРАММНО-АППАРАТНОЙ ИМИТАЦИИ ЛАЗЕРНОГО ДАТЧИКА УГЛОВЫХ СКОРОСТЕЙ | 2021 |
|
RU2757856C1 |
| Стенд полунатурного моделирования движения летательного аппарата с цифровой системой управления | 2022 |
|
RU2786280C1 |
| Стенд комплексирования информационно-управляющих систем многофункциональных летательных аппаратов | 2016 |
|
RU2632546C1 |
| АВИАЦИОННЫЙ ТРЕНАЖЕР МОДУЛЬНОЙ КОНСТРУКЦИИ | 2004 |
|
RU2247430C1 |
| СПОСОБ ИМИТАЦИИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА ДЛЯ ОТРАБОТКИ СИСТЕМЫ САМОНАВЕДЕНИЯ ПРИ ПРОВЕДЕНИИ ЛЕТНЫХ ИСПЫТАНИЙ | 2016 |
|
RU2636430C1 |
| УЧЕБНО-ТРЕНИРОВОЧНЫЙ КОМПЛЕКС АВИАЦИОННЫЙ | 2004 |
|
RU2250511C1 |
| ЭКСПЕРИМЕНТАЛЬНО-ОТЛАДОЧНЫЙ КОМПЛЕКС ДЛЯ СУДОВЫХ ИНТЕГРИРОВАННЫХ НАВИГАЦИОННЫХ СИСТЕМ | 2018 |
|
RU2696964C1 |
Устройство имитации движения летательного аппарата для отработки программного и аппаратного обеспечения полётного контроллера содержит рабочее место оператора, модуль сопряжения, программатор радиотрансивер. Рабочее место оператора включает в себя персональный компьютер, радиоаппаратуру управления, монитор. Модуль сопряжения содержит имитаторы, выполненные с возможностью осуществления имитации бортового оборудования, приборов и датчиков, предназначенных для управления движением летательного аппарата. Обеспечивается возможность тестирования и отработки программного и аппаратного обеспечения полётного контроллера без модификации программного обеспечения, повышение достоверности реакций полетного контроллера при проведении имитации. 8 з.п. ф-лы, 1 ил. 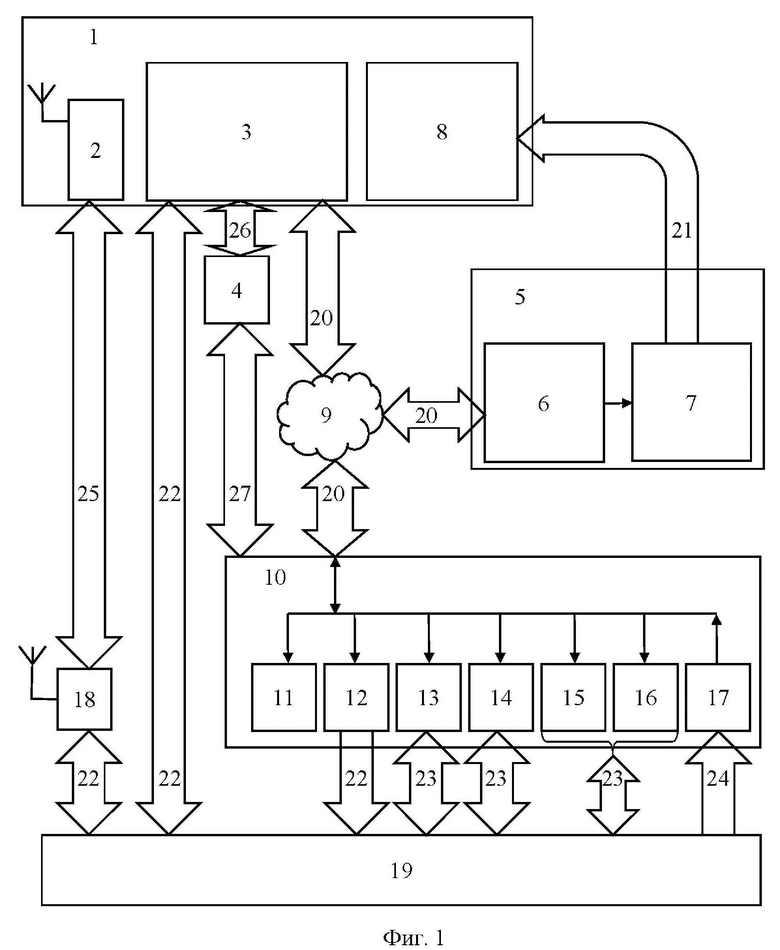
1. Устройство имитации движения летательного аппарата для отработки программного и аппаратного обеспечения полётного контроллера, содержащее соединенные рабочее место оператора, вычислительный комплекс и полетный контроллер; причем рабочее место оператора включает в себя персональный компьютер; вычислительный комплекс выполнен с возможностью моделирования динамики и визуализации движения летательного аппарата; монитор выполнен с возможностью отображения результатов визуализации, отличающийся тем, что дополнительно содержит модуль сопряжения, программатор и радиотрансивер; рабочее место оператора дополнительно включает в себя радиоаппаратуру управления, монитор для отображения результатов визуализации движения летательного аппарата; причём рабочее место оператора, вычислительный комплекс и модуль сопряжения соединены друг с другом через локальную вычислительную сеть, а полётный контроллер соединён своими интерфейсами с интерфейсами модуля сопряжения, причём каждый интерфейс модуля сопряжения обслуживается одним или несколькими имитаторами бортовых приборов и датчиков; полётный контроллер через последовательные интерфейсы соединён с радиотрансивером и непосредственно с персональным компьютером, входящим в состав рабочего места оператора; радиотрансивер соединён посредством радиоканала с радиоаппаратурой управления, входящей в состав рабочего места оператора; программатор соединён с модулем сопряжения и с рабочим местом оператора; полётный контроллер выполнен с возможностью вычисления пространственной ориентации, географического положения и динамических характеристик летательного аппарата на основании показаний бортовых приборов и датчиков; модуль сопряжения выполнен с возможностью имитации бортовых приборов и датчиков путём преобразования данных, поступающих от вычислительного комплекса, и являющихся результатами моделирования динамики, в показания бортовых приборов и датчиков, которые затем предоставляются полётному контроллеру; полетный контроллер выполнен с возможностью выдачи управляющих воздействий на органы управления летательным аппаратом, которые также поступают на модуль сопряжения, где преобразуются соответствующим имитатором в величины отклонения сервоприводов, задаваемую мощность электродвигателей и тому подобные физические величины, которые затем передаются в модель динамики, осуществляемую вычислительным комплексом; модуль сопряжения содержит имитаторы, выполненные с возможностью осуществления имитации бортового оборудования, приборов и датчиков, предназначенных для управления движением летательного аппарата; модуль сопряжения содержит имитаторы, выполненные с возможностью осуществления имитации бортового оборудования, приборов и датчиков, предназначенных для управления движением летательного аппарата.
2. Устройство имитации движения летательного аппарата для отработки программного и аппаратного обеспечения полётного контроллера по п.1, отличающееся тем, что модуль сопряжения содержит модуль конфигурирования.
3. Устройство имитации движения летательного аппарата для отработки программного и аппаратного обеспечения полётного контроллера по п.1, отличающееся тем, что модуль сопряжения может содержать имитатор внешнего запоминающего устройства.
4. Устройство имитации движения летательного аппарата для отработки программного и аппаратного обеспечения полётного контроллера по п.1, отличающееся тем, что модуль сопряжения содержит имитатор спутниковой навигационной системы.
5. Устройство имитации движения летательного аппарата для отработки программного и аппаратного обеспечения полётного контроллера по п.1, отличающееся тем, что модуль сопряжения содержит имитатор инерциального модуля.
6. Устройство имитации движения летательного аппарата для отработки программного и аппаратного обеспечения полётного контроллера по п.1, отличающееся тем, что модуль сопряжения содержит имитатор магнитометра.
7. Устройство имитации движения летательного аппарата для отработки программного и аппаратного обеспечения полётного контроллера по п.1, отличающееся тем, что модуль сопряжения содержит имитатор барометрического высотомера.
8. Устройство имитации движения летательного аппарата для отработки программного и аппаратного обеспечения полётного контроллера по п.1, отличающееся тем, что модуль сопряжения содержит имитатор датчика давления набегающего потока.
9. Устройство имитации движения летательного аппарата для отработки программного и аппаратного обеспечения полётного контроллера по п.1, отличающееся тем, что модуль сопряжения содержит имитатор сервоприводов и электронных регуляторов скорости.
| Аппаратно-программная платформа стенда полунатурного моделирования для отработки вычислителя беспилотного летательного аппарата | 2021 |
|
RU2771111C1 |
| Стенд комплексирования информационно-управляющих систем многофункциональных летательных аппаратов | 2016 |
|
RU2632546C1 |
| Устройство для счета груженых вагонеток | 1933 |
|
SU35448A1 |
| CN 207148641 U, 27.03.2018 | |||
| CN 209265261 U, 16.08.2019 | |||
| CN 202632098 U, 26.12.2012. | |||
